相位式激光测距原理及其技术实现ppt课件
相位式光电测距的基本原理

相位式光电测距的基本原理
嘿,朋友们!今天咱来聊聊相位式光电测距的基本原理,这可真是个神奇又有趣的玩意儿呢!
你看啊,相位式光电测距就好像我们和目标之间的一场特殊“对话”。
想象一下,我们发出一束光,就像我们向目标喊了一句话。
这束光跑啊跑,跑到目标那里,然后又反射回来。
我们呢,就等着接收这个反射回来的光。
这里面关键的就是这个“相位”啦!就好比我们听音乐的时候,不同的音符有不同的频率和相位。
这束光也是一样,它在传播的过程中,相位会发生变化。
我们通过检测这个相位的变化,就能知道光跑了多远啦!
说起来简单,实际可复杂着呢!这就像是解一道很难的谜题。
我们得非常精确地测量和分析这个相位的变化。
就好像你要在一堆沙子里找出一粒特别的沙子一样,需要特别的细心和耐心。
那这相位式光电测距有啥用呢?哎呀,用处可大了去了!比如在建筑工地上,工程师们要用它来精确测量距离,这样才能保证建筑物建得稳稳当当的呀!还有在测绘领域,没有它,那些地图可就没那么准确啦!
而且哦,这技术还在不断发展和进步呢!就跟我们人一样,不断学习,不断变得更好。
以后说不定能测的距离更远更精确呢!
总之呢,相位式光电测距真的是个了不起的东西。
它就像我们的眼睛一样,能帮我们看到那些我们用普通方法看不到的距离和细节。
它让我们的生活变得更方便,让我们的世界变得更精彩!所以啊,可别小看了这小小的相位式光电测距哦,它可是有着大大的能量呢!。
相位测距
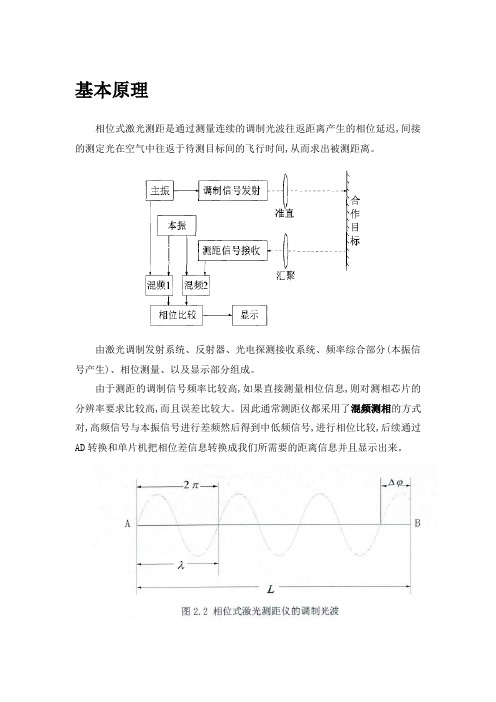
基本原理相位式激光测距是通过测量连续的调制光波往返距离产生的相位延迟,间接的测定光在空气中往返于待测目标间的飞行时间,从而求出被测距离。
由激光调制发射系统、反射器、光电探测接收系统、频率综合部分(本振信号产生)、相位测量、以及显示部分组成。
由于测距的调制信号频率比较高,如果直接测量相位信息,则对测相芯片的分辨率要求比较高,而且误差比较大。
因此通常测距仪都采用了混频测相的方式对,高频信号与本振信号进行差频然后得到中低频信号,进行相位比较,后续通过AD转换和单片机把相位差信息转换成我们所需要的距离信息并且显示出来。
频率选择根据测距仪的设计需要,比如:测量精度、量程、计算简便,选择合适的测尺频率。
测尺频率可由下式确定:相位测量技术相位式激光测距仪中测距光波被接收以后通过测量相位差来计算光波飞行时间,因此相位测量是测距仪中关系到测距精度的一个关键部分。
主要的数字相位测量方法有以下几种:自动数字测相、欠采样同步检测法、向量内积法。
由于相位式激光测仪的测距要求精度比较高,测距光波的调制频率比较高,因此直接进行相位测量,则对器件的要求比较高,现在一般都釆用混频的方式与数字检相搭配使用,这样可以先把高频信号差频成中频或低频信号,然后再进行相位比较。
激光测距仪的总体设计1)采用波长为650mn的半导体激光器做光源,雪崩二极管做光电探测器;2)选用单一的直接测尺方式,测尺频率为lOMHz ,本地振荡信号频率为9.995MHz;3)用AD8002A做光电探测器前置放大电路和带通滤波器;4)用于测相的混频输出信号为5KHz,理论测尺长度为15米。
测相精度在毫米量级;5)使用AD8302做测相芯片,模数转换芯片将模拟信号转换成数字信号,传送给单片机控制系统,并且通过LCD显示出距离;6)采用窄带干涉滤光片来抑制带外噪声。
激光调制:利用有源晶体振荡器来产生lOMHz的高频振荡信号接入调制电路V端,测距回波接收部分光电器件:APD硅光电二极管在体积、响应速度、可靠性上相比其他元件都有非常好的特性,特别是硅材料制成的雪崩光电二极管(Avalanche Photo Diode,简称APD)。
激光相位法测距页PPT文档

模拟开关切换电路
6、CPLD电路设计 具体的设计指标:电路I/O 口为LVTTL电平;计数频 率大于100MHZ 在该系统中,差频系统与检相系统都是在CPLD内部 实现
CPLDEPM240核心电路
7、单片机相关电路设计 单片机为ATM128
单片机及其外围电路
8、电源模块设计 整个系统所需的电源电压有+9V, +5V, -5V, +3.3V和 +1.8V。 其中+9V可由交流转直流的变压器提供,也可由蓄 电池提供,而其它电源则由+9V转化而来。 (1)+5V 电源 二极管为常用的1N5824,开关电压调节器LM2596
(4)接收部分使用PIN光电二极管,经前置放大后, 使用MFB带通滤波提取有用信号,精尺频率与粗尺 频率经过通道切换幵关后采用同一组放大整形电路, 减小系统复杂度,缩小电路板面积,节约成本。 (5)在高速CPLD内部实现参考信号与本振信号的差 频、测量信号与本振信号的差频,两个差频采用自
主要元件:两片AD9954(直接数字式频率合成器), ATM128单片机, EPM--240T100C5N, 液晶显示器LCD12864,开关电容芯片LM2662 ,低压差电压调节芯片LM1117, LM2596-5.0(开关电压调节器), 电平转换芯片MAX3232和DB9的串口线接口, 高速比较器芯片AD8611, 高速电流反馈宽带运放AD8001 单刀双掷(SPDT)模拟开关ADG636, 电压反馈放大器AD8045, 激光二极管BOS650010, 双路、宽带跨导运算放大器OPA2662
1、频率综和电路 具体设计指标:产生5MHz,50MHz, 5.001MHz, 50.0001MHz的频 率;可在低频与高频间快速切换;电压幅度为-500mV~500mV。
激光其它测量技术PPT课件

(S1 - S2 ) =
A0
或:d =
A0 V0 Vd
V0 d A0
第29页/共46页
三、扫描镜电流计测径
第30页/共46页
四、位相调制扫描测量技术
影响激光扫描测量精度的主要因素: 工件边缘的衍射现象
衍射使被测工件的边界模糊,用时间脉冲计数 时,必然引人误差,使前述的光点扫描测量精度 限制在士0.01 mm。 位相调制扫描测量技术采用空间调制光束来扫描工 件,通过测量位相,而不是测时间来获得被测件的 尺寸,测量精度可达士1 um,适合于各种高温、高 压下做非接触高精度现场测量。
• 近在工件外形尺寸测量中得到广泛应用,应用最 多的是侧量线材直径。
• 其原理: 用一束平行光以恒定的速度扫描线材,并由放在
线材对面的光电接收器接收,投射到光电接收器 上的光线在光束扫描线材时被遮断,所以光电接 收器输出的是一个方波脉冲,脉冲宽度与线材直 径成正比。
第22页/共46页
一、转镜扫描测径
L =ct =c = (m m) 2f
若测量出某一时刻的相位,则测出 波通过的距离
第37页/共46页
为方便测量出相位变化,一般采用反射式
2L = (m m)
则
L = (m m) =Ls (m m) 2
实际上: 1. cos为2π周期的函数,
不能直接测出m的变化量 2. 一般的检相电路,只能检
出0-2π之间的相位变化
2)测量为CCD1与CCD2输出电压的比值,因此两CCD 参数尽量一致, 其物理参数尽量一致的同时,曝光时间、 采样间隔应严格同步
3)由于求频率是由鉴频器的特性决定, 鉴频器应该 恒压、恒温措施
第21页/共46页
§6.2 激光扫描测径技术
激光测距非常详细ppt课件

8.2 脉冲激光测距
激光测距的基本公式为:
d 1 ct 2
c——大气中的光速
t——为光波往返所需时间
由于光速极快,对于一个不太大的D来说,t是一个很小的量,
例:设D=15km,c=3×105km/sec
则t=5×10-5sec
由测距公式可知,如何精确测量出时间t的值是测距的关键。由 于测量时间t的方法不同,产生了两种测距方法:
卫星激光测距-激光器 :
总的来讲在其它条件相同时,发射激光的脉冲能量 越高,脉宽越窄,重复率越高,峰值功率越大,则 系统的测距能力越高。
千赫兹皮秒激光器为第四代卫星激光测距之激光器。 下一代卫星测距用激光器为双波长激光器。
测距误差分析
(1) 测距系统仪器误差 – 激光脉冲宽度误差 – 时间间隔测量误差 – 主波计时探测误差 – 回波计时探测误差 – 时钟同步误差 – 时钟频率标准误差
卫星激光测距技术集光机电于一身,涉及计算机软、硬件技术, 光学、激光学、大地测量学、机械学、电子学、天文学、自动控制 学、电子通讯等多种学科。因此SLR测距仪系统十分复杂,消耗较大, 故障率较高,同时受天气因素制约,维护起来也比较困难,需要花费 较大的人力物力,但它又是目前精度最高的绝对观测技术手段。
即Ii=IN·Cosi 则该漫反射体称作“余弦幅射体”或“郎伯幅射体”。 设激光发射光轴与目标漫反射面法线重合,且主要反射 能量集中在1rad以内(约57°) 则Ω=πu2=π
则Pe Pt T / Pt T 1 2
式中:ρ——目标漫反射系数 Tα——大气单程透过率
3、测距仪光接受系统能接受到的激光功率Pr
SPAD
接收望远镜
转台
测距精度与激光脉宽
测距精度是由于激光脉冲前后沿时间差造成的;
激光测距(非常详细).ppt

?
? ? 2? L c
L? c ?? 2nf 2?
?t
短距离、
高精度, 精度可达 毫米级。
三、卫星激光测距
作为激光测距应用的最重要成果之一 ——卫星激光测距 Satellite Laser Ranging ,简称为 SLR)技术起源于二十世纪六 十年代,是目前单次测距精度最高的卫星观测技术,其测距精度已 达到毫米量级,对卫星的测轨精度可达到 1-3 cm。
激光测距是通过测量激光光束在待测距离上往返传播的时间来换算出 距离的,其换算公式为:
d ? ct 2
测距方法分类
脉冲测距法:测距仪发出光脉冲,经被测目标反射后,光 脉冲回到测距仪接收系统,测量其发射和接收光脉冲的时 间间隔,即光脉冲在待测距离上的往返传播时间t。脉冲法 测距精度大多为米的量级; 相位测距法:它是通过测量连续调制的光波在待测距离上 往返传播所发生的相位变化,间接测量时间t。这种方法测 量精度较高,因而在大地和工程测量中得到了广泛的应用。
第九讲 激光测距
电子工程学院光电子技术系
主要内容
8.1 概述 8.2 脉冲激光测距 8.3 多周期脉冲激光测距 8.4 相位激光测距
8.1 概述
激光测距的特点
激光测距仪与其它测距仪(如微波测距仪等)相比, 具备的特点: ? 探测距离远测距精度高 ? 抗干扰性强 ? 保密性好 ? 体积小 ? 重量轻
一、脉冲激光测距
由激光器对被测目标发射一个光脉冲,然后接收系统接收目标 反射回来的光脉冲,通过测量光脉冲往返的时间来算出目标的距离:
d ? ct 2
测程远,精度与激光脉宽有关,普通的纳秒 激光测距精度在米的量级 。
t 的测量:
开
结
始
束Байду номын сангаас
激光测距原理培训讲义PPT(含计算公式解析)

二、光电读数(图9-4) 图9-4
因为
s
1 ct 2
1cN 2
fT
( fT 为晶振频率)
测距仪的最小脉冲正量δ为:
令N=1
则 c
2 fT
例:设fT=150MHz=1.5×108Hz,C=3×108m
则:
3 10 8 2 1.5 10 8
1m
三、测距精度
对S
CN 2 fT
则Pe Pt T / Pt T 1 2
式中:ρ——目标漫反射系数 Tα——大气单程透过率
3、测距仪光接受系统能接受到的激光功率Pr
Pr=Pe·Ωr·Kr
Ωr——目标对光接收系统入瞳的张角(物方孔径角)
所对应的立体角
r
Ar R2
Kr——接收光学系统透过率
§9-3 相位激光测距
一、相位测距原理 通过检测被高频调制的连续激光往返后和初始信号的
相位差可使测距精度大大提高。 连续激光经过高频调制后成为高频调制光,设调制频
率为fυ,如图9-11所示。 激光往返一周的时间t可以用调制波的整数周期数及不
足一个周期的小数周数来表示。
图9-11
t N 1 2 f
4.经N个周期后,关闭计数器; 5.将N个周期测量的总时间t减去N个周期延时的时间N t0的 值取平均值,就可得到光脉冲往返一次所需的时间。
6.将该时间代入测距公式后可得所测距离。
设时钟脉冲频率为fT,测距仪距目标距离为S,光脉冲经
过N个周期后所走的总路程为L,
则L
2NS
Ct
Nt0
Cm
相位式光电测距仪的工作原理

§4.2 相位式光电测距仪的工作原理相位式光电测距仪的种类较多,但其基本的工作原理是相同的。
本节将讨论相位式光电测距仪的工作原理,并着重介绍它的几个主要部件的工作原理。
4.2.1 相位式光电测距仪的工作原理相位式光电测距仪的工作原理可按图4-4所示的方框图来说明。
图4-4由光源所发出的光波(红外光或激光),进入调制器后,被来自主控振荡器(简称主振)的高频测距信号所调制1f ,成为调幅波。
这种调幅波经外光路进入接收器,会聚在光电器件上,光信号立即转化为电信号。
这个电信号就是调幅波往返于测线后经过解调的高颇测距信号,它的相位已延迟了Φ。
∆Φ+⨯=ΦN π2这个高频测距信号与来自本机振荡器(简称本振)的高频信号1f '经测距信号混频器进行光电混频,经过选频放大后得到一个低频(11f f f '-=∆)测距信号,用D e 表示。
D e 仍保留了高频测距信号原有的相位延迟∆Φ+⨯=ΦN π2。
为了进行比相,主振高频测距信号的一1f 部分称为参考信号与本振高频信号1f '同时送入参考信号混频器,经过选频放大后,得到可作为比相基准的低频(11f f f '-=∆)参考信号,0e 表示,由于没有经0e 过往返测线的路程,所以不存在0e 象中产生的D e 那一相位延迟Φ。
因此,D e 和同时送人0e 相位器采用数字测相技术进行相位比较,在显示器上将显示出测距信号往返于测线的相位延迟结果。
当采用一个测尺频率时1f ,显示器上就只有不足一周的相位差∆Φ所相应的测距尾数,超过一周的整周数所相N 应的测距整尺数就无法知道,为此,相位式测距仪的主振和本振二个部件中还包含一组粗测尺的振荡频率,即主振频率 32,f f 和本振频率 32,f f ''。
激光测距非常详细课件

一、脉冲激光测距
由激光器对被测目标发射一个光脉冲,然后接收系统接收目标 反射回来的光脉冲,通过测量光脉冲往返的时间来算出目标的距离:
d ct 2
测程远,精度与激光脉宽有关,普通的纳秒 激光测距精度在米的量级 。
t 的测量:
开
结
始
束
在确定时间起始点之间 用时钟脉冲填充计数。
t
时钟 脉冲
t=NT
激光测距是通过测量激光光束在待测距离上往返传播的时间来换算出 距离的,其换算公式为:
d ct 2
测距方法分类
脉冲测距法:测距仪发出光脉冲,经被测目标反射后,光 脉冲回到测距仪接收系统,测量其发射和接收光脉冲的时 间间隔,即光脉冲在待测距离上的往返传播时间t。脉冲法 测距精度大多为米的量级; 相位测距法:它是通过测量连续调制的光波在待测距离上 往返传播所发生的相位变化,间接测量时间t。这种方法测 量精度较高,因而在大地和工程测量中得到了广泛的应用。
机
箱
关
伺服系统
发射望远镜
SPAD
接收望远镜
转台
测距精度与激光脉宽
测距精度是由于激光脉冲前后沿时间差造成的;
因此激光脉冲宽度影响测距精度:L C t
表:测距精度与脉宽的比较
脉宽
10ns
100ps
测距精度 3m
3cm
10ps 3mm
卫星激光测距主要指标与激光器分系统的关系
• 测距精度—激光脉宽. • 测程(近地星、远地星)—激光能量、发散角. • 回波率—激光能量、发散角、激光脉冲重复频率.
(2) 卫星反射器误差 – 反射器质心修正值误差
(3) 系统延迟测量误差 – 地靶距离标定误差 – 地靶常规标校测量误差
激光相位法测距课件

在信号处理过程中,放大器噪声和ADC量化误差是主要的误差源。放大器噪声是由于电子热运动产生的随机波动,而ADC量化误差是由于有限位数对模拟信号的近似表示造成的。此外,时钟源的误差也会影响信号处理的精度,因为时钟源决定了信号处理的采样率和时间基准。
05
CHAPTER
提高激光相位法测距精度的措施
定期清洁光学元件,确保光路畅通无阻,减少光的散射和反射。
保持光路的清洁
保持光路环境的恒温,避免温度变化对光学元件的影响,确保光路的稳定性。
温度控制
采取有效的减震措施,降低外界振动对光路稳定性的干扰。
振动隔离
根据测距范围和精度要求,选择适当的调制频率,以提高信号的信噪比和抗干扰能力。
调制频率选择
根据调制频率和系统带宽,选择合适的采样频率,确保能够准确捕获信号相位信
感谢您的观看。
远距离测量
由于激光的相干性和干涉效应,激光相位法测距具有较强的抗干扰能力,能够在复杂的环境中进行测量。
抗干扰能力强
激光相位法测距需要稳定的测量环境,以避免外界因素对干涉信号的影响。
需要稳定环境
激光相位法测距在航天领域中广泛应用于卫星轨道测量、地球观测和天文观测等。
航天测量
激光相位法测距在军事领域中用于远程武器定位、导弹精确制导和战场侦察等。
04
CHAPTER
激光相位法测距的误差分析
光路调整误差是由于发射和接收光路的不对准或光学元件的误差所引起的。
总结词
在激光相位法测距中,发射和接收光路必须精确对准,以确保测量结果的准确性。任何光路的不对准都会导致测量误差,因为接收器可能无法正确接收发射器发出的激光信号。此外,光学元件的误差也会影响光路的调整,如透镜和反射镜的制造误差。
相位法激光测距原理及算法详解

激光相位法测距的原理激光相位测距中,把连续的激光进行幅度调制,调制光的光强随时间做周期性变化,测定调制光往返过程中所经过的相位变化即可求出时间和距离。
图.1 相位式激光测距原理示意图如图1所示,设发射处与反射处(提升容器)的距离为x ,激光的速度为c ,激光往返它们之间的时间为t ,则有:cxt 2设调制波频率为f ,从发射到接收间的相位差为 ,则有:N cfxft 242 (2) 其中,N 为完整周期波的个数, 为不足周期波的余相位。
因此可解出:)(2)22(24N N fcN f c f c x(3) 其中,f c L s 2 称为测尺或刻度,N 即是整尺数, 2 N 为余尺。
根据测得的相位移的大小,可知道N 余尺的大小。
而整尺数N 必须通过选择多个合适的测尺频率才能确定,测尺频率的选择是提升容器精确定位的关键因素之一。
多尺测量方法测量正弦信号相移的方法都无法确定相位的整周期数,即不能确定出相位变化中 2的整倍数N ,而只能测量不足 2的相位尾数 ,因此公式(2.3)中的N 值无法确定,使该式产生多个解,距离D 就不能确定。
解决此缺陷的办法是选用一个较低的测尺频率s f ,使其测尺长度s L 稍大于该被测距离,这种状况下不会出现距离的多值解。
但是由于测相系统的测相误差,会导致测距误差,并且选用的s L 越大则测距误差越大。
因此为了得到较高的测距精度而使用较短的测尺长度,即较大的测尺频率s f ,系统的单值测定距离就相应变小。
为了解决长测程和高精度之间的矛盾,一般使用的解决办法是:当待测距离D 大于基本测尺sb L (精测测尺)时,可再使用一个或几个辅助测尺sl L (又叫粗测测尺),然后将各个测尺测得的距离值组合起来得到单一的和精确的距离信息。
由此可见,用一组测尺共同对距离D 进行测量就可以解决距离的多值解,即用短尺保证精度,用长尺保证量程。
这样就解决高精度和长测程的矛盾[4]。
本系统选用10米作为精尺,1000米作为粗尺,带入公式即可求得精尺频率和粗尺频率:精尺频率 MHz L cf 152510(4) 粗尺频率 kHz L cf 150210001000 (5) 其中,光速s m c /1038 。
《激光测距》课件

目前,激光测距技术已经取得了很多突破,如高精度、高速度、高稳定性的测量,以及在复杂环境下 的测量能力。未来,激光测距技术有望实现更多突破,如实现更高精度的测量、更远距离的测量、更 小体积的设备等。
激光测距与其他技术的融合发展
要点一
激光测距与机器视觉技术的融合
要点二
激光测距与物联网技术的融合
激光测距在智能化和物联网领域的应用
智能化应用
激光测距技术在智能化领域有着广泛的应用 前景。例如,在智能制造中,激光测距技术 可以用于自动化生产线上的测量和定位;在 智能交通中,激光测距技术可以用于车辆距 离和速度的测量,提高交通安全性。
物联网应用
激光测距技术在物联网领域也有着重要的应 用价值。例如,在智能农业中,激光测距技 术可以用于农田面积和作物高度的测量,实 现精准农业管理;在智能安防中,激光测距 技术可以用于建筑物和设施的安全监测和预 警。
通过测量激光脉冲往返时间来计算距 离。精度高,但受限于光速和时间测 量精度。
通过测量激光光束在目标表面产生的 光斑位置来计算距离。具有结构简单 、测量范围大等优点,但精度较低。
相位激光测距
通过测量激光光束的相位变化来计算 距离。具有较高的测量精度和动态范 围,但易受环境影响。
激光测距系统的性能指标
THANK YOU
。
02
激光测距系统
激光测距系统的组成
激光发射器
用于产生激光束,通常 采用脉冲或连续波方式
。
目标反射器
用于将激光束反射回接 收器,通常为平面反射
镜或漫反射器。
接收器
用于接收反射回来的激 光束,并进行光电转换
。
信号处理单元
用于处理接收到的信号 ,计算出目标距离。
相位式激光测距仪

相位式激光测距仪1、相位式激光测距技术相位式激光测距仪,是利用固定频率的高频正弦信号,连续调制激光源的发光强度并测定调制激光往返一次所产生的相位延迟。
通过相位延迟计算测量的距离。
相位式测距是通过测量连续的幅度调制信号在待测距离上往返传播所产生的相位延迟,间接地测定信号传播时间,从而得到被测距离的。
这种方法测量精度高,通常在毫米量级。
1.1基本原理相位式激光测距的基本原理框图如图1.1所示。
图1.1 相位法激光测距基本原理图它由激光发射系统、角反射器、接收系统、综合频率系统、混频鉴相系统和计数显示系统等组成。
角反射器是一种三个反射面之间互成90 °的光学棱镜,90 角要求有误差小于±2 '' 的加工精度;它可以把射来的光线按原方向反射回去,即一个入射光射入后,不论入射角如何,经角反射器棱镜反射后的光线与入射光线平行。
相位法激光测距技术就是利用发射的调制光和被目标反射的接收光之间光波的相位差所包含的距离信息来实现对被测目标距离量的测量。
由于采用调制和差频测相技术,具有测量精度高的优点,广泛应用于有合作目标的精密测距场合。
基本原理如下:图1.2 相位式激光测距调制波形图设调制频率为 f ,幅度调制波形如图 1.2 所示,波长为λ=c/f式中c是光速,λ是调制波形的波长。
由图可知,光波从 A 点传到 B 点的相移φ 可表示为φ= 2 mπ +∆φ = ( m +∆m )2π式中,m 是零或正整数,∆m 是个小数,∆m=∆φ/2π。
A,B 两点之间的距离L 为L=ct=cφ/(2πf)式中,t 表示光由 A点传到B 点所需时间。
由于用一台测距仪直接测量 A 和B 两点光波传播的相移是非常困难的,因此采用在B 点设置一个反射器(即所谓合作目标),使从测距仪发出的光波经反射器反射再返回测距仪,然后由测距仪的测相系统对光波往返一次的相位变化进行测量。
图1.3 示意地表示光波在距离L 上往返一次后的相位变化。
激光测距原理课件

激光接收器
激光接收器用于接收反射回来的激光束, 并将其转换为电信号。
它通常由光电探测器、前置放大器和光 学系统组成,其中光电探测器将光信号 转换为电信号,前置放大器则对微弱的 电信号进行放大,光学系统则负责聚焦
和准直。
激光接收器的性能直接影响测距精度和 测量范围,因此对其灵敏度和抗干扰能
影响,从而提高测量精度。
优化数据处理算法
03
通过改进和优化数据处理算法,可以更准确地提取距量范围
研发超远距离激光测距仪
通过提高激光器的功率和采用超远距离探测器,可以扩大激光测 距的测量范围。
采用相位调制技术
相位调制技术可以消除激光束在大气中传播时的散射和折射效应, 从而扩大测量范围。
中精度激光测距
测量精度达到厘米级,广 泛应用于地形测绘、建筑 测量等领域。
低精度激光测距
测量精度达到米级,常见 于车辆导航、安全监控等 领域。
04 激光测距的应用
建筑测量
建筑物的长度、宽度、高度和距离等参数的测量
利用激光测距仪可以快速、准确地测量建筑物的各种参数,为施工提供可靠的数据支持。
施工过程监测
测量距离在百米以内,常 用于地形测绘、机器人定 位等。
中距离激光测距
测量距离在百米至千米之 间,广泛应用于建筑测量、 车辆导航等领域。
长距离激光测距
测量距离在千米至数十千 米,常见于大范围地形测 绘、气象观测等。
按测量方式分类
脉冲式激光测距
通过测量激光脉冲往返时间来计 算距离,具有测量精度高、测量
激光测距无需接触被测物体,可以方便地 测量难以接近或移动的物体。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
6
相位式激光测距原理分析(5)
三、间接测尺原理(2)
对于上例的测量要求,用间接测尺频率方式,从表可以看出, 各个间接测尺的频率值非常接近,频宽为150kHz,只有直接 测尺方式的1/100。在这样窄的频率范围内可以使放大器和 调制器获得相当接近的增益和相位稳定性,从而提高测量精 度。
11
相位式激光测距技术实现(2)
DDS的原理框图
目前许多芯片公司都已生产了性能可观的DDS芯片, 如Standford公司的STEL2375,其最高工作频率可达 1GHz,输出信号带宽为400MHz,频率分辨力为mHz级。 可见,这些性能指标完全可以满足激光调制的需要。
12
相位式激光测距技术实现(3)
二、相位差测量的实现
为简化相位差计电路的设计,减小系统的体积和功耗, 采用FPGA(现场可编程门阵列)配合少量地外围电路实现相 位差的测量,换算和显示功能。
13
Thanks
The End
Any questions please mail to tjuhuangjack@
14
在这么宽的频带内保证1/1000的测相精度是很难实现的,故实
际测量中采用间接测尺频率方式。
用两个频率fs1和fs2的调制光去测同一距离得到:
L=Ls1(m1+Δm1)
L=Ls2(m2+Δm2)
等效形式为: L=Ls (m+Δm)
其中Ls=Ls1Ls2/(Ls2+Ls2)=1/2×C/(fs1- fs2)=1/2×C/ fs
号频率大大降低,提高了下一步测相的精度。
9
相位式激光测距原理分析(8)
四、相位差测量原理(3)
相位差测量原理图:
两路信号的相位差Δφ=360Nτ/T=N(360 fc / fm ) 其中τ为频标脉冲周期; fm为频标脉冲频率; fc为被测信号 频率;N为计数值。 如果令fm =360fc ,则计数值N直接表示 了相位差,这时精度为1度。
7
相位式激光测距原理分析(6)
四、相位差测量原理 (1)
主控振荡器信号 es1 =Acos(ωs t+ φs) 本地振荡器信号 el =Acos(ωl t+ φl) 接受到的信号 es2 =Acos(ωs t+ φs +Δφ)
8
相位式激光测距原理分析(7)
四、相位差测量原理(2)
混频后输出:
参考信号 er =Dcos[(ωs –ωl)t+(φs- φl)] 测距信号 es =Dcos[(ωs –ωl)t+(φs- φl)+ Δφ] 取ωs –ωl在几kHz到几十kHz,这样包含相位差信息的正弦信
5
相位式激光测距原理分析(4)
三、间接测尺原理(1)
上述的直接测尺频率方式在实际应用中会遇到频带过宽,测
相精度难以实现的问题。例如:要求测程100km,精度0.01m,
测相精度为1/1000,则对应的直接测尺长度为100km,1km,
10m,频率分别为1.5kHz,150kHz,15MHz,频带宽近15MHz。
2
相位式激光测距原理分析(1)
原理示意图:
3
相位式激光测距原理分析(2)
一、基本原理 • 若调制光角频率为ω,在待测量距离LAB上往返一次
产生的相位延迟为φ,则对应时间t 可表示为: t=(φ+Δφ)/ω 其中φ+Δφ=2π(m+Δm)
m:表示激光往返LAB所经历的整数个波长 Δm:表示不足一个波长的分量 则待测距离LAB可表示为 LAB =1/2 ct=1/2 c·(φ+Δφ)/ω=1/2λ(m+Δm)
10
相位式激光测距技术实现(1)
一、激光调制的实现
由于采用多尺度测量,而且是运用间接测尺频 率方式和差频测相技术,这就要求系统必须有一套 高性能的频率发生装置,实现多种频率的高速切换。 而且为保证测量精度,要求频率发生器的精度很高。 传统的压控振荡器不仅频率稳定速度慢,而且频率 精度不高,不能胜任激光调制的任务。目前在电子 工程领域得到广泛应用的DDS(直接数字频率合成) 技术,非常适合作为这里对激光进行调制的频率源。
=Ls(m+Δm) 其中 Ls称作“光尺”
4
相位式激光测距原理分析(3)
二、多尺度原理
目前任何测量交变信号相位的方法,都不能确定出相位的整周 期数m,只能测出不足一个波长的尾数部分Δφ=2πΔm,由于m 值不确定,故距离LAB就成为多值解。既然相位测量可以确定被 测量的尾数,那么,利用两种光尺同时测量同一个量,则可以解 决多值问题。系统中用两把相同精度的光尺,其中一把光尺的 Ls1 <LAB ,另一把光尺Ls2>LAB ,分别测量同一距离,然后把测 得的结果,相互组合起来即可。比如:距离为2.047m,用Ls1 =0.1m的光尺测量得到不足0.1m的尾数0.047m,用Ls2=10m的光 尺测量得到不足10 m 的尾数为2 m,把两个光尺相加起来的读 数为2.047 m。 这样就解决了大量程和高精度的矛盾。其中最长 的测尺决定了测距的量程,最短的测尺决定了测距的精度。
相位式激光测距原理及其技术实现
2005级光学工程 黄岑 (2005202089) tjuhuangjack@
1
激光测距概览
• 激光测距按实现机理可分为脉冲式和连续波相位式。 • 脉冲式的优势在于测试距离远,信号处理简单,被测
目标可以是非合作的。但其测量精度并不太高,现在 广泛使用的手持式和便携式测距仪大多采用这种原理, 作用距离为数百米至数十千米,测量精度为五米左右。 • 连续波相位式激光测距仪是用无线电波段的频率,对 激光束进行幅度调制并测定调制光往返测线一次所产 生的相位延迟,再根据调制光的波长,换算此相位延 迟所代表的距离。连续波相位式的优势是测距精度高, 相对误差可保持在百万分之一以内,但被测目标必须 是合作的。