车载激光与单目线阵相机的数据融合
激光雷达与单目相机联合标定原理
激光雷达与单目相机联合标定原理嘿,朋友们!今天咱来唠唠激光雷达与单目相机联合标定原理这档子事儿。
你说这激光雷达啊,就像是一双超级敏锐的眼睛,能特别精确地感知周围环境的形状和距离。
它那厉害劲儿,就好比是能把周围的一切都看得清清楚楚、明明白白的。
而单目相机呢,也不弱呀!它能捕捉到丰富的色彩和细节,就像一个细心的记录员,把看到的美好都给留下来。
那为啥要把它们联合起来标定呢?这就好比是一场完美的合作!激光雷达能提供精准的距离信息,可在识别具体物体上可能就没那么在行啦。
这时候单目相机就来帮忙啦,它能把那些物体分辨得清清楚楚。
它们俩一联手,那可真是如虎添翼呀!想象一下,激光雷达在前面探路,告诉我们这里有多远那里有多远,单目相机在后面给每个东西都贴上标签,让我们清楚地知道这是啥那是啥。
这配合,多默契呀!联合标定的过程呢,其实也不难理解。
就像是给两个小伙伴制定一套共同的规则,让它们能更好地一起玩耍。
要让它们的信息能够相互匹配、相互补充,这样我们得到的结果才更准确、更有用。
比如说,我们要让激光雷达测量的点和单目相机拍摄的图像中的位置对应起来。
这可不是随随便便就能做到的哦,得经过一番精心的调整和计算。
就跟你调电视画面一样,得把颜色啦、亮度啦都调到最合适的状态。
而且啊,这个标定可不是一锤子买卖,还得经常检查、调整呢。
就像你和好朋友之间的关系,也得时不时维护一下不是?不然时间长了,可能就会出岔子啦。
你说要是没有这个联合标定,那会咋样呢?哎呀,那可能就像两个各说各话的人,谁也听不懂谁,那可不行呀!我们得让它们好好合作,才能发挥出最大的作用。
总之呢,激光雷达与单目相机联合标定原理就是这么重要又有趣。
它让我们能更好地了解周围的世界,让科技为我们的生活带来更多的便利和惊喜。
咱可得好好研究研究,让它们为我们服务得更好呀!这就是我对激光雷达与单目相机联合标定原理的理解,你们觉得呢?原创不易,请尊重原创,谢谢!。
三维激光和单目视觉间的联合标定与数据融合的开题报告

三维激光和单目视觉间的联合标定与数据融合的开题报告1. 研究背景随着现代工业的快速发展和智能制造技术的不断推进,机器视觉和激光测量等技术已成为以数字化、网络化、信息化为主要特征的制造业的重要手段,被广泛应用于机器人领域、自动化生产线等领域。
其中,三维激光和单目视觉是两种重要的感知技术,可以分别获取目标物体的几何信息和图像信息,并且在实际应用中通常需要进行联合标定和数据融合,以获取更为精确、完整的物体信息。
2. 研究内容本研究将针对三维激光和单目视觉间的联合标定和数据融合问题展开深入研究,重点包括以下内容:(1)三维激光和单目视觉的联合标定方法研究:通过探索不同的标定模型和算法,建立三维激光和单目视觉间的转换关系,得出高精度的联合标定结果。
(2)三维激光和单目视觉数据的融合方法研究:通过比较不同的数据融合方法,探究如何将三维激光和单目视觉数据有效地整合起来,提高数据的精度、完整性和可靠性。
(3)三维激光和单目视觉联合应用研究:通过实验验证,探讨三维激光和单目视觉联合应用在机器人领域、自动化生产线等领域中的效果,为实际应用提供可行性分析和技术支持。
3. 研究方法本研究采用理论分析和实验验证相结合的方法,具体包括以下步骤:(1)理论研究阶段:通过文献调研和理论分析,探讨三维激光和单目视觉间的联合标定和数据融合方法,并建立相应的模型和算法。
(2)数据采集阶段:采用合适的三维激光测量仪和相机,获取目标物体的三维激光数据和图像数据,进行后续实验研究。
(3)实验研究阶段:在实验平台上进行三维激光和单目视觉联合标定和数据融合实验,探究各种方法的适用性和优缺点,并对实验结果进行分析和总结。
4. 研究意义三维激光和单目视觉的联合标定和数据融合是机器视觉和激光测量领域的一个热点研究问题,对于实现物体精确感知和重建具有重要意义。
本研究将探讨三维激光和单目视觉间的联合标定和数据融合方法,为实现机器视觉的智能化应用提供有力支持。
车载激光雷达与摄像头数据融合的智能车辆环境感知技术

图1 激光雷达工作原理传统激光雷达系统的目标检测是由数据预处理、提取特征和激光雷达传感器采集环境点云数据,但在采集中会存在如浮尘等噪声,因此需要通过数据预处理技术降低噪声干扰,减少干扰数据。
其次,使用提取特征技术对点云特征进行提取。
最后将具有相同特征点云聚类一起,完成目标检测。
图2 多传感器数据融合结构3.1 数据层融合车载摄像头能获取到可见光环境数据信息,摄像头相对于激光雷达相比成本较低,是目前应用最广的传感器设备之一。
摄像定摄像头和激光雷达的数据。
把激光雷达采集到三维数据与摄像头采集的二维数据融合,目前常用的技术有基于标靶、基于无靶、基于运动标定和基于深度学习标定。
基于深度学习标定能通过多次训练实现特征提取与学术|行业分析ACADEMIC特征匹配,其自动化程度高、稳定性好。
通过提取摄像头和激光雷达原始数据进行回归计算,就能自动估计变换范围,最终完成数据标定。
3.2 特征层融合目标检测是近年来人工智能技术领域热门研究方向,对车辆环境目标检测要做到实时、精准,也是智能化汽车环境感知的一个挑战。
通常对汽车车载摄像头采集到的道路信息进行检测为二维目标检测,主要包括单阶段检测算法和两阶段检测算法两种。
由于要满足智能汽车检测和部署速度,一般采用简短检测算法完成车辆环境目标检测。
车载激光雷达采集的数据进行目标检测属于三维目标检测,三维目标检测能对目标空间、姿态和深度进行检测,从而提升目标检测精准度。
激光雷达传感器收集的三维数据主要用于图像的检测和点云与图像融合的检测。
三维目标检测技术运用在目标检测、目标跟踪和语义分割等智慧车辆环境感知中。
基于点云的目标检测目前主流算法有K-Means算法、DBSCAN算法等,能对激光雷达采集到的点云数据进行处理。
特征层融合是对多传感器数据融合后,进行数据特征法的提取,该操作也通常称为中间层融合。
特征层数据融合以一个单位特征量的形式输出,相比数据层的数据,特征层把数据融合后还要进行关键特征提取工作。
车载激光点云与面阵CCD影像数据融合技术

收稿日期: 2012 - 03 - 06 基金项目: 国家科技支撑基金( 2012BAH34B01 ) 作者简介: 赵 坤( 1987 —) , 男, 山东聊城人, 在读硕士研究生, 研究 方向为车载三维信息获取与应用。
2012 年第 7 期
中州煤炭
总第 199 期
和面阵 CCD 相机 也 分 别 以 系统 设 定 和 定 距 曝 光的 形式来获取路面及道路周边目标物的点云数据和影 像数据。所有的传感器都受控于车载计算机控制系 统; 在数据采集 的 过 程 中, 面 阵 CCD 相 机 被 触 发 曝 光时将 Flash 信号以打标的形式传递给 GPS, 这样系 统 各 传 感 器 就 能 以 UTC ( Coordinated Universal Time) 时间为基准建立统一的时间坐标系。
Research on Integration Technology of Vehicleborne Laser Point Clouds and Areaarray CCD Camera
Zhao Kun1 , Wang Liuzhao2 , Lu Yong1
( 1 . Capital Normal University, Beijing 100048 , China; 2 . Chinese Academy of Surveying and Mapping, Beijing 100039 , China) Abstract: The areaarray CCD camera is a digital camera sensor in the vehicleborne laser scanning system which can acquire the image information of the objects; the laser scanner can acquire 3D coordinate data of the objects, and finally forms 3D point cloud of the objects. In this paper, an algorithm which can integrate laser point cloud and areaarray CCD data was proposed to realize the generation of the colorful point cloud. Keywords: laser point cloud; areaarray CCD; data integration; pixel coordinate; colorful point cloud
单目相机-3维激光雷达的外参标定及融合里程计研究

单目相机-3维激光雷达的外参标定及融合里程计研究随着自动驾驶技术的逐步成熟,汽车行业已经开始大规模使用传感器和计算机模拟系统来实现汽车自动化和智能化。
在自动驾驶中,视觉感知是其中一个重要的模块,而单目相机则是视觉感知中广泛使用的传感器之一。
同时,3D激光雷达可以提供非常准确的环境地图和障碍物检测,并且一般不受光照变化和天气的影响,因此在自动驾驶中也发挥着重要作用。
在使用单目相机和3D激光雷达进行自动驾驶中,相机和激光雷达之间的外部参数(外参)必须被精确地标定。
外参指相机和激光雷达之间转换坐标系时使用的参数,这些参数包括相机在世界坐标系中的位置和方向,以及相机在图像坐标系中的内部参数。
在本篇文章中,我们将讨论如何进行单目相机和3D激光雷达的外参标定,并研究如何将两种传感器的数据融合以提高定位的精度。
首先,让我们考虑单目相机的标定。
单目相机的标定是一个估计相机位置和方向的过程,通常使用刻度板进行标定。
在此过程中,我们需要收集多幅拍摄了刻度板的图像,并使用专业的标定软件对图像进行分析和处理。
标定过程中,我们需要计算相机的内部参数,即图像中心,焦距和径向和切向畸变。
同时,我们还需要估计相机在三维世界坐标系中的位置和方向,通常采用互相垂直的两个方向来描述相机的朝向。
最终,我们可以将相机的外参储存在一个矩阵中,该矩阵将相机坐标系映射到世界坐标系中。
接下来,让我们考虑3D激光雷达的标定。
在进行激光雷达标定之前,我们需要将激光雷达与相机对准。
这样我们可以使用同一组标定图像,并利用激光雷达与相机对准的参考坐标系对激光雷达的外参进行标定。
激光雷达的外参可以定义为将激光雷达坐标系映射到相机坐标系中的变换矩阵。
与相机标定不同的是,我们需要使用3D物体进行标定。
通常,我们使用由平面和球体构成的标定板。
最后,让我们考虑如何将单目相机和3D激光雷达数据融合以提高定位精度。
融合过程包括从两个传感器获取数据并对其进行配准的过程。
BEV特征下激光雷达和单目相机融合的目标检测算法研究

BEV特征下激光雷达和单目相机融合的目标检测算法研究李文礼;喻飞;石晓辉;唐远航;杨果【期刊名称】《计算机工程与应用》【年(卷),期】2024(60)11【摘要】为提高自动驾驶汽车对周围目标物的检测精度,提出了一种激光雷达和单目图像数据在鸟瞰图特征上融合的目标物检测算法(monocular-bird’s eye view fusion,Mono-BEVFusion)。
为构建相机BEV特征,搭建了简单高效的深度预测网络预测相机特征的深度,基于显式监督的方法用深度真值对其进行监督。
构建激光雷达BEV特征时,将激光点云体素化为柱状网格转化到BEV特征下,设计BEV特征融合网络将激光点云BEV特征和相机BEV特征融合,将融合特征输入到目标检测框架得到目标物(汽车、行人和骑行人)检测结果。
利用KITTI数据集和实车路采数据对Mono-BEVFusion融合算法进行评估,实验结果表明该算法相较于现有融合算法综合平均精度提升了2.90个百分点,其中汽车类和行人类单项检测精度分别提升3.38个百分点和4.13个百分点。
Mono-BEVFusion融合算法对遮挡目标或者距离较远的目标有较稳定的检测效果,能够有效避免单传感器的漏检现象,具有较好的实际应用价值。
【总页数】12页(P182-193)【作者】李文礼;喻飞;石晓辉;唐远航;杨果【作者单位】重庆理工大学汽车零部件先进制造技术教育部重点实验室;重庆长安汽车股份有限公司【正文语种】中文【中图分类】TP391【相关文献】1.基于单目相机与激光雷达融合的SLAM方法2.一种基于单目相机与激光雷达信息融合构建致密地图方法的实现3.浅析改善农村生态环境对生态农业经济发展的影响4.基于激光雷达与单目相机融合的人体多目标室内定位系统5.单目相机-3维激光雷达的外参标定及融合里程计研究因版权原因,仅展示原文概要,查看原文内容请购买。
车载激光与单目线阵相机的数据融合

激光具 有 非 常 精 确 的 测 距 能 力, 可 以 快 速、 方 便、 准确地获取被测物体的空间三维坐标, 是获取空 间数据的有效手段;线阵 CCD 具有快速获取空间物 体的二维几何形状 信 息 的 能 力, 可以通过获取的图 是获取物体纹理信 像提取物体的外形 和 颜 色 信 息, 息的有效手段 . 目前, 单一的数 据 处 理 在 车 载 数 据 处 理 中 无 法 满足三维快速重建的要求 . 单目线阵 CCD 采集的图 像无法交会出三维 坐 标;激 光 点 云 数 据 无 法 获 取 物 体场景的颜色信息, 建筑物提取自动化程度低等都 是制约车载扫描数据三维快速建模的难题 . 因此, 结 合 激 光 和 单 目 线 阵 CCD 相 机 的 优 缺 点, 发挥各自优 势, 将 激 光 与 单 目 线 阵 CCD 相 机 的 建立点云与图像像素的映射关系, 将成 数据相结合, 为车载三维快速重建的关键步骤 . 应用实 践 中, 已经有一些学者尝试将激光与 CCD 相机进行整合 . P. Ronnholm ( 2007 ) 总结了激 光 和 CCD 相机数据 的 融 合 方 法, 依 据 最 终 结 果、 原始 数据种类或描述重 点 的 不 同 分 为 四 个 层 次, 分别为 对象级融合 、 激光辅助融合 、 摄影测量辅助融合和紧
[ 11 ]
. 表 2 为激光原始坐标数
各传感器类型及主要技术指标
型号 NovAtel DL4 北航 技术指标 采集频率:20 Hz. 采集频率:100 Hz. 角度分辨率:0 . 25 ° ; 最大距离:80 m ; 距离分辨率: 10mm / typ. ( ± ) 35mm ; 扫描频率:18 . 7 Hz.
图1
车载系统同步采集设计示意图
( x, y ) 为 像 点 q ( i, j ) 的 像 平 面 坐 标, ( X, 其中, Y, Z ) 为激光点 Q 的坐标, ( Xs , Ys , Zs , φ, ω, κ ) 为第 i 83
车载移动测量激光点云与线阵影像融合

精 度 高 ,能 够 满 足 各 种 复 杂 情 况下 的 移 动 测 量 要 求 。
关键 词 :车载移动测量 ;点云 ;线 阵影像 ;融合 中图分类号 :P 2 3 7 文献标 志码 :A 文章 编号 :1 0 0 9—4 7— 0 5
摘
要: 提 出一种线 阵影像数据 与激 光点云数据融合 方法 :利用组合导航数据解算 点云绝对 坐标 的同时 ,也获取
线阵相机 的外方位元素 ,进 而能够从线 阵影像 中计 算查找 到与点云对应 的 R G B值 ,实现 点云数据 与影像数据 的 融合 。经试验证明 ,该技术方法在数据处理过程 中无 需进行 同名点 匹配 ,实现 了数据 融合 的 自动化 处理 ,融合
车载 移 动测 量 激 光 点 云 与线 阵影 像 融合
基于激光雷达和相机信息融合的目标检测及跟踪
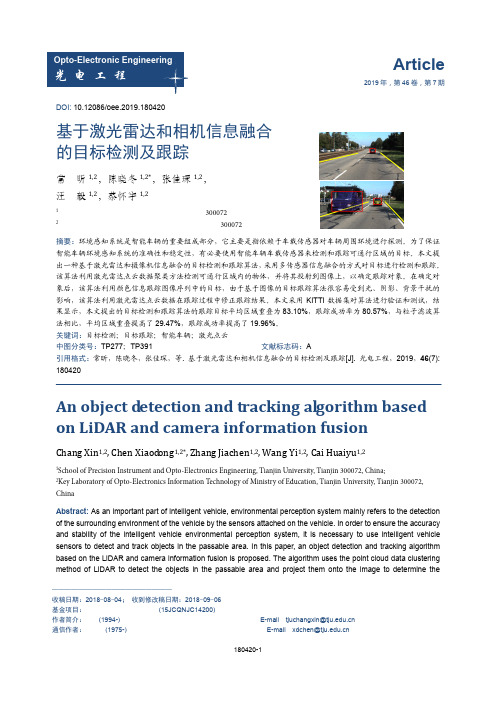
1School of Precision Instrument and Opto-Electronics Engineering, Tianjin University, Tianjin 300072, China; 2Key Laboratory of Opto-Electronics Information Technology of Ministry of Education, Tianjin University, Tianjin 300072, China
180420
An object detection and tracking algorithm based on LiDAR and camera information fusion
Chang Xin1,2, Chen Xiaodong1,2*, Zhang Jiachen1,2, Wang Yi1,2, Cai Huaiyu1,2
180420-1
光电工程 DOI: 10.12086/oee.2019.180420
tracking objects. After the objects are determined, the algorithm uses color information to track objects in the image sequence. Since the object tracking algorithm based on image is easily affected by light, shadow and background interference, the algorithm uses LiDAR point cloud to modify the tracking results. This paper uses KITTI data set to verify and test this algorithm and experiments show that the target area detection overlap of the proposed target detection and tracking algorithm is 83.10% on average and the tracking success rate is 80.57%. Compared with particle filtering algorithm, the average region overlap increased by 29.47% and the tracking success rate increased by 19.96%. Keywords: object detection; object tracking; intelligent vehicle; LiDAR point cloud Citation: Chang X, Chen X D, Zhang J C, et al. An object detection and tracking algorithm based on LiDAR and camera information fusion[J]. Opto-Electronic Engineering, 2019, 46(7): 180420
车载激光点云与面阵CCD影像数据融合技术研究

jcs I hsp p r a loi m hc a ne rt s r on lu n raaryC D d t spo o e orai h e eaino e t.nti a e ,nag r h w ihc nitgael e itco da dae —ra C aawa rp sd t el etegn rt f t a p z o
面 阵 C D 相 机 是 获 取 目标 物 表 面 颜 色 纹 理 属 性 和 C
tm) 系统 载体 ( e 、 即车辆 ) 车 载 升 降平 台 、 载计 算 、 车 机控 制 系统及 车载 供 电系 统 , 然还 有 作 为 数据 传 当
感器 的获 取 目标 物 外部 空间 三维坐标 数据 的激 光扫 描仪 ( ae S an rL ) L sr cn e , S 和获 取 目标 物 影 响 纹 理 数 据 的面 阵 C D相 机 。 。 C 。
摘 要 : 车 载 激 光 扫描 系 统 中 , 阵 C D 相 机 是 其 影 像 数 据 获 取 的 传 感 器 , 来 获 取 目标 物 的 颜 色 纹 理 数 在 面 C 用
据 ; 光 扫 描 仪 可 以 获 取 目标 物 表 面 空 间 的 三 维 坐 标 数 据 , 终 形 成 三 维 点 云 。 阐述 了 一 种 激 光 点云 数 据 与 激 最 面 阵 C D影 像 数 据 的 融合 方 法 , 现 彩 色 点 云 的 生 成 。 C 实 关 键 词 : 光 点云 ; 阵 C D; 据 融合 ; 素 坐 标 ; 激 面 C 数 像 彩色 点云 中图 分 类 号 : P 7 . T 24 2 文献标志码 : A 文 章 编 号 :0 3— 5 6 2 1 ) 7— 0 7— 3 1 0 0 0 ( 0 2 0 0 2 0
激光雷达与相机融合标定的关键技术

激光雷达与相机融合标定的关键技术激光雷达与相机融合标定的关键技术激光雷达与相机融合标定是实现机器人感知和环境建模的关键技术之一。
通过准确地确定激光雷达和相机之间的几何关系和传感器参数,可以将它们的测量结果进行融合,从而提高机器人的感知能力和决策准确性。
下面,将按照步骤解释激光雷达与相机融合标定的关键技术。
第一步是获取标定数据。
为了进行标定,需要同时采集激光雷达和相机的数据。
可以使用一个机器人平台,将激光雷达和相机固定在同一位置上,并在不同的方向和角度下进行数据采集。
这些数据将用于之后的标定算法。
第二步是提取特征点。
对于激光雷达和相机的数据,需要提取共同的特征点。
激光雷达的数据可以直接使用其测量点的坐标作为特征点,而相机的数据则需要通过图像处理算法提取特征点,例如角点或边缘点。
提取的特征点应该具有良好的重复性和稳定性。
第三步是建立特征点匹配关系。
将激光雷达和相机的特征点进行匹配,可以确定它们之间的对应关系。
可以使用特征描述子或几何模型匹配算法来实现这一步骤。
匹配的准确性对于之后的标定结果至关重要。
第四步是求解标定参数。
通过已经匹配的特征点,可以利用几何关系或最小二乘法求解出激光雷达和相机之间的转换矩阵和其他参数。
这些参数包括旋转矩阵、平移矩阵和相机的内参矩阵等。
第五步是评估标定结果。
对标定结果进行评估可以检查其准确性和稳定性。
可以使用重投影误差等指标来评估标定结果,并根据需要对标定参数进行微调和优化。
最后一步是应用标定参数。
将求解出的标定参数应用于机器人的感知和决策过程中。
通过将激光雷达和相机的测量结果进行融合,可以提高机器人对周围环境的感知能力,实现更准确的目标检测、地图构建和路径规划等任务。
总之,激光雷达与相机融合标定是一项复杂而关键的技术,可以提高机器人的感知能力和决策准确性。
通过获取标定数据、提取特征点、建立匹配关系、求解标定参数、评估结果和应用标定参数等步骤,可以实现激光雷达与相机之间的准确标定,并将其应用于机器人的感知和环境建模中。
利用车载照相机与激光雷达融合技术进行车辆跟踪及检测的方法研究
wi h a r . T e i g e o n t n tc n q e c n t c h r c d n e il e p t e u n h n e n t te c me a h ma e r c g i o e h i u a r k t e p e e i g v hc e d s i f q e tc a g s i h i a er
Abta tT i p p rdsr e o ut rc igm to h t o ie cn iglsrrd r S R)wt sr c :hs a e eci sarb s t kn ehd ta cmbnsasann ae aa ( L b a i a h
c me a t a u e h a wa itn e n a ea st n r c ur tl .W ih t i t o ,a p e e i g v — a r o me s r e d y d sa c sa d l tr lpo ii smo e a c ae y o t h smeh d rc dn e hil sfrtd t ce n t e ba i ft e d gt ld t u p tb h LR n t, n h e i l st e r c e y ce i s ee t d o h sso h i i a a o t u y t e S i a u i a d t e v h ce i h n ta k d b b t LR n h a r . v ra l h p e l t thi t o s u e n p o e sng t e i g st k n oh S a d t e c me a A a ib e s a e t mp ae mac ng meh d i s d i r c s i h ma e a e
激光雷达 相机 融合原理

激光雷达相机融合原理一、激光雷达相机融合是啥玩意儿呢?嘿,小伙伴们,今天咱们来唠唠激光雷达相机融合的原理呀。
这激光雷达相机融合呢,就像是把两个超厉害的小伙伴拉到一起合作。
激光雷达就像是一个超级精确的测量小能手,它可以发射激光束,然后根据激光反射回来的时间啊,距离啊之类的,就能知道周围物体的位置、形状等信息。
而相机呢,就像是一个超级画家,它可以把周围的景象拍下来,让我们看到颜色啊、纹理这些超级丰富的东西。
那为啥要把它们融合起来呢?你想啊,如果只有激光雷达,那我们看到的世界就只是一些干巴巴的数据,没有色彩和那些细腻的纹理。
要是只有相机呢,虽然画面美美的,但是对于物体的精确位置啊,距离啥的就没那么清楚啦。
所以把它们融合起来,就像是给超级测量小能手装上了画家的眼睛,给超级画家装上了精确测量的脑子。
二、融合的原理是怎么回事呢?激光雷达工作的时候,它会不断地发射激光脉冲。
当激光脉冲碰到物体的时候就会反射回来,根据这个时间差就能算出到物体的距离啦。
相机呢,是通过镜头把光线聚焦到感光元件上,然后形成图像。
在融合的时候呢,首先得把它们的数据在同一个坐标系里面表示出来。
这就好像要让两个来自不同国家的小伙伴用同一种语言交流一样重要呢。
然后呢,要对数据进行处理。
比如说,激光雷达探测到的物体轮廓数据,要和相机拍到的这个物体的外观数据进行匹配。
比如说,一个汽车在前面,激光雷达能探测出汽车的大概形状和距离,相机能拍到汽车的颜色是红色的,车身上有漂亮的花纹。
融合的时候,就要把汽车的形状、距离信息和颜色、花纹信息准确地组合在一起。
这可不是一件简单的事儿哦,就像要把拼图碎片准确地拼在一起,一块都不能错呢。
而且在这个过程中,还要考虑到数据的准确性、实时性等等。
如果数据不准确,那融合出来的结果可能就会很奇怪,就像把猫的身子和狗的脑袋拼在一起一样搞笑又不合理啦。
三、融合原理在实际中的应用这种融合原理在好多地方都超级有用呢。
像自动驾驶汽车领域,汽车要在道路上行驶,就得知道周围的路况。
相机和激光雷达融合 评价指标

相机和激光雷达融合评价指标相机和激光雷达是两种常见的传感器技术,它们在自动驾驶、智能机器人和安防监控等领域有着广泛的应用。
相机主要通过图像采集来获取环境信息,而激光雷达则通过激光束扫描测量物体的距离和形状。
将相机和激光雷达融合可以充分利用它们的优势,提高环境感知的精度和可靠性。
在自动驾驶领域,相机和激光雷达的融合是实现环境感知的重要手段。
相机可以提供高分辨率的图像信息,可以用于识别和跟踪车辆、行人和道路标志等。
而激光雷达可以提供精确的距离和形状信息,可以用于建立精准的环境地图和障碍物检测。
将相机和激光雷达的数据进行融合,可以综合利用它们的优势,提高自动驾驶系统的感知能力和决策准确性。
相机和激光雷达的融合可以通过多种方法实现,常用的方法包括传统的传感器融合算法和深度学习算法。
传统的传感器融合算法主要基于概率统计理论,通过将相机和激光雷达的数据进行融合,得到更加准确和可靠的环境模型。
而深度学习算法则通过神经网络的训练和学习,自动从相机和激光雷达的数据中提取特征和信息,并进行融合。
这些算法可以提高环境感知的精度和鲁棒性。
相机和激光雷达的融合在智能机器人领域也有着广泛的应用。
相机可以用于物体识别和目标跟踪等任务,而激光雷达可以用于建立环境地图和导航规划。
将相机和激光雷达的数据进行融合,可以提高机器人的环境感知和导航能力,使其能够更加精确和安全地执行任务。
在安防监控领域,相机和激光雷达的融合可以提高监控系统的效果和可靠性。
相机可以用于人脸识别和行为分析等任务,而激光雷达可以用于精确的距离测量和运动检测。
将相机和激光雷达的数据进行融合,可以提高监控系统的准确性和实时性,更好地满足安防需求。
然而,相机和激光雷达的融合也面临一些挑战。
首先,相机和激光雷达的数据具有不同的特点和表示方式,如何有效地将它们进行融合是一个复杂的问题。
其次,相机和激光雷达的数据存在噪声和误差,如何准确地估计和校正这些误差也是一个难题。
此外,相机和激光雷达的融合还需要考虑实时性和计算复杂度等问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
激光具 有 非 常 精 确 的 测 距 能 力, 可 以 快 速、 方 便、 准确地获取被测物体的空间三维坐标, 是获取空 间数据的有效手段;线阵 CCD 具有快速获取空间物 体的二维几何形状 信 息 的 能 力, 可以通过获取的图 是获取物体纹理信 像提取物体的外形 和 颜 色 信 息, 息的有效手段 . 目前, 单一的数 据 处 理 在 车 载 数 据 处 理 中 无 法 满足三维快速重建的要求 . 单目线阵 CCD 采集的图 像无法交会出三维 坐 标;激 光 点 云 数 据 无 法 获 取 物 体场景的颜色信息, 建筑物提取自动化程度低等都 是制约车载扫描数据三维快速建模的难题 . 因此, 结 合 激 光 和 单 目 线 阵 CCD 相 机 的 优 缺 点, 发挥各自优 势, 将 激 光 与 单 目 线 阵 CCD 相 机 的 建立点云与图像像素的映射关系, 将成 数据相结合, 为车载三维快速重建的关键步骤 . 应用实 践 中, 已经有一些学者尝试将激光与 CCD 相机进行整合 . P. Ronnholm ( 2007 ) 总结了激 光 和 CCD 相机数据 的 融 合 方 法, 依 据 最 终 结 果、 原始 数据种类或描述重 点 的 不 同 分 为 四 个 层 次, 分别为 对象级融合 、 激光辅助融合 、 摄影测量辅助融合和紧
关键词 : 车载三维信息采集与处理系统, 数据融合, 空间同步 . 中图分类号 : P 228 密融 合, 并给出每种融合方式的实例
[ 1]
1
引
言
. Schenk
( 2002 ) 提出 从 传 感 器 对 位 建 立 通 用 参 考 系 和 特 征
[ 2] 提取两个层次融合航空影像和 LIDAR 数据 . 邓非
[ 13 ]
图像帧序号 135 136 137 138
确定最佳成像 扫 描 行 的 算 法:本 文 根 据 车 载 三 维信息 采 集 系 统 自 身 特 点, 结合激光点云与线阵 CCD 图 像 数 据, 提 出 了 逐 行 查 找 的 迭 代 算 法, 具体 步骤为: 1 ) 激光点云数据通过 UTC 时间与 GPS 打标文 找 到 时 间 最 接 近 的 线 阵 CCD 图 像 的 扫 描 件同步, 线. 2 ) 根 据 该 扫 描 线 的 UTC 时 间 同 步 得 到 IMU /
[ 11 ]
. 表 2 为激光原始坐标数
各传感器类型及主要技术指标
型号 NovAtel DL4 北航 技术指标 采集频率:20 Hz. 采集频率:100 Hz. 角度分辨率:0 . 25 ° ; 最大距离:80 m ; 距离分辨率: 10mm / typ. ( ± ) 35mm ; 扫描频率:18 . 7 Hz.
曝光时间 / s 9 662. 009 093 9 662. 309 312 9 662. 609 532 9 662. 909 751
Ys , Zs ) 可 通 过 扫描行的外方 位 元 素 . 投 影 中 心 ( X s , IMU / DGPS 数据和 投 影 中 心 与 GPS 天 线 相 位 中 心 的偏心分量计算得到 . 4. 2 空间同步 空间同步就是确定最佳成像扫描行的过程 . 确定最 佳 成 像 扫 描 行 的 必 要 性: 激 光 与 线 阵 CCD 相机在车的前进方向上有一个偏移量, 在传 感 器扫描时造成两个传感器无法同一时刻扫描同一地 物点, 因而对于同一地物点激光与线阵 CCD 相机在 如 图 2. 时 间 间 隔 不 数据获取时存在一定时间间隔, 是固定不变 的, 它 由 两 个 传 感 器 之 间 的 偏 移 量、 车 两个传感器扫 描 的 角 度 和 距 离 决 定 . 因 此, 激光 速、 点云与线阵 CCD 图 像 融 合 的 关 键 问 题 就 是 确 定 地 即成像的扫描行号, 进而确定该扫 物点的曝光时间, 描行的外方位元素
第 31 卷 第 2 期 2010 年 4 月
首都师范大学学报( 自然科学版) Journal of Capital Normal University ( Natural Science Edition )
No. 2 Apr. ,2010
车载激光与单目线阵相机的数据融合
杨 勇 钟若飞 康永伟 秦 涛
杨
勇等:车载激光与单目线阵相机的数据融合
2
2. 1
系统组成与设计
系统组成 车载三维信息采集系统是一个多传感器集成的
3
地面点三维坐标计算
车载激光扫描仪对地面的扫描得到扫描仪与地
同时由 IMU 和 GPS 得到扫描仪的 面上各点的距离, 由此通 过 式 1 即 可 计 算 得 到 地 面 点 的 位置和姿态, 三维坐标
[ 3]
. 张栋
( 2005 ) 采用人工选取 同 名 点, 进行单张相片空间后
[ 4] 实 现 LIDAR 数 据 和 航 空 影 像 的 配 准 . 另 方交 会,
一 方 面,李 茂 西 ( 2005 ) 、周 克 勤 ( 2006 ) 、陈 远 ( 2007 ) 、 湛金辉( 2008 ) 通过外部标定建立激光点 云 与单目 CCD 图像像素的映射关系模型, 将图像的纹 理信息赋予 点 云 数 据 借鉴价值 . 车载单目线 阵 CCD 相 机 与 激 光 在 安 装 时 各 方 相 机 以“线 中 心 投 影 ” 方式( 一 向都有一个偏移 量, 次曝光成一 条 扫 描 线 ) 对 场 景 进 行 推 扫 成 像, 因而 无法对同一物体同 时 扫 描, 存在一个非固定的扫描 时间间隔 . 外部标 定 无 法 解 决 这 一 问 题 . 另 外, 直接 线性变换没有考虑线阵图像外方位元素随时间变化 的特点, 一般多项式 忽 略 了 道 路 两 侧 地 形 起 伏 较 大 的特点
[ 9] [ 5] [ 6] [ 7] [ 8]
. 这些研究对于车载
激光与单目线 阵 CCD 相 机 的 数 据 融 合 具 有 重 要 的
, 数字微分 纠 正 需 要 DEM 参 与 纠 正, 没有
考虑车载投影比例变化率较大的特点 . 基于此, 本文 提出了针对车载系统的多源数据融合方法 .
Hale Waihona Puke 82第2期图1
车载系统同步采集设计示意图
( x, y ) 为 像 点 q ( i, j ) 的 像 平 面 坐 标, ( X, 其中, Y, Z ) 为激光点 Q 的坐标, ( Xs , Ys , Zs , φ, ω, κ ) 为第 i 83
首都师范大学学报( 自然科学版)
2010 年 表3 线阵图像对应的时间数据
Y, Z) , 的是由通用参考坐 标 系 下 的 激 光 点 Q ( X , 求 j) , 其在线阵 CCD 图像上的像点 q ( i , 并将 q 的 RGB 值赋 给 Q. 实 现 方 法 是 通 过 车 载 系 统 同 步 设 计 实 现 数据的同步采集, 进而由式 2 构像方程确定最佳扫 描行实现空间同步, 从而确定对应像点的行列值, 最 后经过颜色内插并赋值给对应的点云 . x = - f y = 0 = - f a 1 ( X - X s ) + b 1 ( Y - Y s ) + c1 ( Z - Z s ) a 3 ( X - X s ) + b 3 ( Y - Y s ) + c3 ( Z - Z s ) a 2 ( X - X s ) + b 2 ( Y - Y s ) + c1 ( Z - Z s ) a 3 ( X - X s ) + b 3 ( Y - Y s ) + c3 ( Z - Z s ) ( 2 ) [12 ]
激光点云数据
激光点云三维坐标 / m
激光扫描仪
SICK LMS291
线阵相机
TVI XIIMUS 2048CT
像素分辨率:2 048 ; 线扫描频率:33 . 3 Hz.
2. 2
同步设计 车载三维信息 采 集 系 统 运 行 时, 车辆以一定的
4
4. 1
数据融合
基本原理 激光点云与 单 目 线 阵 CCD 图 像 数 据 融 合 的 目
[ 10 ]
由定位定姿传 感 器 和 遥 感 传 感 器 两 部 分 传 感 系统, 器组成, 并与车辆 、 车载升降平台 、 车载计算机系统 、 及电源系统组成整 个 系 统 . 定 位 定 姿 传 感 器 包 括 惯 IMU ) 和 GPS 性测量单元( Inertial Measurement Unit , ( Global Position System , GPS ) , 获 取 系 统 时 间、 系统 平台 位 置 和 姿 态; 遥 感 传 感 器 包 括 激 光 扫 描 仪 ( Laser Scanner , LS ) 和线阵 CCD 相机,LS 获取目标 线阵 CCD 相机获取目标 地物的空间三维坐标数据, 地物的图像纹理数 据 . 系 统 各 传 感 器 类 型 及 主 要 技 术指标见下表 1 :
0907 收稿日期:2009 * 国家 “十一五 ” 863 计划地球 观 测 与 导 航 技 术 领 域 项 目“车 载 ( 2006 AA12 Z324 ) 多传感器集成关键技术研究 ”
( 2007 ) 提出 基 于 立 体 像 对 匹 配 点 与 三 维 扫 描 点 云 的最邻近迭代配准方法, 将 立 体 像 对 匹 配 点“整 体 ” 配准到由激光扫描 点 云 描 述 的 三 维 表 面 上
GPS 和 IMU 同 时 观 测, GPS 测 定 车 行 运 速度行 驶, 动轨迹上每 一 历 元 时 刻 位 置 、 速 度, 与 IMU 数 据 组 合确定 平台 的位置和姿态, 激光扫描仪和线阵 CCD 相机也同时以各自固定的频率采集道路两侧地物点 云和图像, 所有传感器都受控与计算机系统, 并通过 同步 控 制 系 统 触 发 脉 冲 来 实 现 数 据 同 步 采 集, 图1 显示了车载系统同 步 采 集 的 实 现 方 式 . 通 过 时 间 同 步控制器和 GPS 及 其 打 标 功 能 将 系 统 内 各 种 设 备 的时间信息统一于 UTC ( 世界协调时) 时间上 .