马尔科夫相关性质、马尔科夫随机场详解分解
神经网络中的马尔科夫随机场原理解析
神经网络中的马尔科夫随机场原理解析随着人工智能的快速发展,神经网络成为了研究的热点之一。
神经网络的应用范围广泛,其中一个重要的应用领域就是图像识别和语音识别。
而神经网络中的马尔科夫随机场原理则是实现这些识别任务的关键。
马尔科夫随机场(Markov Random Field,MRF)是一种用于建模随机变量之间关系的图模型。
它的基本思想是将一个系统分解为若干个局部的马尔科夫随机场,然后通过这些局部模型的组合来描述整个系统的行为。
在神经网络中,马尔科夫随机场被应用于对图像和语音等数据进行建模和分析。
在图像识别中,神经网络通过学习大量的图像样本,提取图像的特征并建立模型。
然而,由于图像中的像素之间存在着复杂的空间关系,传统的神经网络往往无法充分利用这种关系。
而马尔科夫随机场的引入则可以解决这个问题。
马尔科夫随机场可以描述图像中像素之间的相互作用关系。
它假设每个像素的取值依赖于其周围像素的取值,且这种依赖关系可以通过一个能量函数来描述。
这个能量函数可以衡量图像中的不一致性和不完整性,通过最小化能量函数,可以得到图像中像素的最优取值,从而实现图像的识别和分割。
在语音识别中,马尔科夫随机场同样起到了重要的作用。
语音信号是一种时间序列数据,其中每个时间点的取值依赖于前面的取值。
传统的神经网络在处理时间序列数据时,往往无法充分利用这种时序关系,导致识别效果不佳。
而马尔科夫随机场的引入则可以解决这个问题。
马尔科夫随机场可以描述语音信号中的时序关系。
它假设每个时间点的取值依赖于前面几个时间点的取值,且这种依赖关系可以通过一个状态转移矩阵来描述。
通过学习大量的语音样本,可以得到这个状态转移矩阵,并利用它来对新的语音信号进行识别。
总结起来,神经网络中的马尔科夫随机场原理是一种用于建模随机变量之间关系的图模型。
它可以描述图像和语音等数据中的像素或时间点之间的相互作用关系,从而提高神经网络在图像识别和语音识别等任务中的性能。
机器学习——马尔可夫随机场(Ma...

机器学习——马尔可夫随机场(Ma...最近刚好在调研马尔可夫随机场,发现可以参考的资料少之⼜少,中⽂外⽂⽂献资料都相对较少。
按照仅有的知识稍作稍作整理⾃留以免之后⽤到再作查询。
有需要的也可以简单参考,但。
根据已有资料确实不太好理解,有简单明了易理解的还望推荐。
马尔可夫随机场(MRF):是关于⼀组有马尔可夫性质的随机变量X的全联合概率分布模型。
换句话说,若⼀组随机变量是马尔可夫随机场,那么其⼀定满⾜马尔可夫性质。
马尔可夫⽹络或是MRF在依赖性的表⽰上类似于贝叶斯⽹络。
两者的区别在于:贝叶斯⽹络是有向⽆环的,⽽马尔可夫⽹络是⽆向可以有环的。
因此,马尔可夫是可以表⽰某些贝叶斯⽹络⽆法表述的依赖关系,⽐如循环依赖。
另⼀⽅⾯,它也不能表⽰贝叶斯⽹络可以表述的依赖,⽐如诱发依赖。
马尔可夫随机场的底图可以是有限的也可以是⽆限的。
1.定义给定⼀个⽆向图G=(V,E),其中每个顶点v∈V表⽰⼀组随机变量X=(Xv),每条边{u,v}∈E表⽰随机变量u和v之间的⼀种依赖关系。
(1)成对马尔可夫性质:任意两个不相邻的变量相对给定的其他全部变量都是条件独⽴的。
(2)局部马尔可夫性质:所有其他变量的邻居变量都是条件独⽴的。
(3)全局马尔可夫性质:对于给定⼀个分离⼦集,任何两组变量都是条件独⽴的以上三个马尔可夫性质并不等价:全局马尔可夫性质强于局部马尔可夫性质,同样的,局部马尔可夫性质也强于成对马尔可夫性质。
Markov⽹Markov⽹也称 Markov 随机场(Markov random field,简称 MRF),是⼀个变量集合 X=(X1,X2,…,X n)∈χ的联合分布模型.它由⼀个⽆向图 G 和定义于 G 上的⼀组势函数φk组成.其中,⽆向图的每个节点都代表⼀个随机变量,⽽ G 中的每⼀个“团(clique)”都对应着⼀个势函数(为⾮负实函数),表⽰团的⼀个状态.Markov ⽹所代表的变量集的联合分布表⽰为P ( X = x ) =1/ Z ∏kφk(X{k}) (1)其中,X{k}表⽰Markov⽹中第k团的状态,即对应于第k个团中所有变量的取值状态。
马尔可夫性质

泊松过程与排队论应用
01
泊松过程在排队论中的角色
泊松过程是一种重要的随机过程,在排队论中广泛应用于描述顾客到达
的规律。
02
排队系统的性能指标
排队系统的性能指标包括平均队长、平均等待时间、系统利用率等,这
些指标可以通过泊松过程和其他随机过程进行建模和分析。
03
排队论在实际应用中的价值
排队论在实际应用中具有广泛的价值,如电信网络中的呼叫中心、交通
03
序列生成与预测
利用马尔可夫模型对序列数据的建模 能力,结合深度学习等技术,可以实 现更加准确的序列生成和预测。
THANKS
感谢观看
稳态概率分布求解
对于非齐次、非遍历性马尔可夫模型,如何求解稳态概率分布是一 个重要的问题。
深度学习等新技术融合创新
01
深度学习与马尔可夫 模型融合
利用深度学习强大的特征提取和表示 学习能力,可以改进传统马尔可夫模 型的性能。
02
强化学习与马尔可夫 决策过程
将强化学习算法与马尔可夫决策过程 相结合,可以实现更加智能的决策和 控制。
马尔可夫性质
汇报人: 2024-02-06
目录 CONTENTS
• 马尔可夫性质概述 • 马尔可夫链基本概念 • 马尔可夫性质在随机过程中应用 • 马尔可夫性质在信息科学中应用 • 马尔可夫性质在金融领域应用 • 马尔可夫性质挑战与未来发展
01
马尔可夫性质概述
CHAPTER
定义与基本思想
马尔可夫性质是指在给定现在状 态下,过去的信息与未来状态无 关,即未来只依赖于现在,而与
非线性、非高斯问题
复杂系统往往呈现出非线性和非 高斯特性,这使得基于线性高斯 假设的马尔可夫模型不再适用。
HMM马尔科夫随机场
HMM可解决的问题
问题1:给定观察序列O=O1,O2,…OT,以及 模型 ( A, B, ) , 如何计算P(O|λ)? 问题2:给定观察序列O=O1,O2,…OT以及 模型λ,如何选择一个对应的状态序列 S = q1,q2,…qT,使得S能够最为合理的解释 观察序列O? 问题3:如何调整模型参数 ( A, B, ) , 使 得P(O|λ)最大?
1i N
终结:
P * max [ T (i )])
1i N * qT arg max [ T (i )] 1i N
qt* t 1 (qt*1 ), t T 1, T 2,...,1 求S序列:
Baum-Welch算法(模型训练算法)
目的:给定观察值序列O,通过计算确定一个模型 , 使得P(O| )最大。 算法步骤:
图像处理
– 图像去噪 – 图像识别
生物医学分析
– DNA/蛋白质序列分析
1 i i 1
1 (i) 0, i N 1
1i N
递归:
t ( j ) max [ t 1 (i)aij ]b j (Oi ), t T ,1 j N 2 t ( j ) arg max [ t 1 (i)aij ], t T ,1 j N 2
N和T分别为状态个数和序列长度 定义:
t (i) max P[q1q2 ...qt 1 , qt i, O1,O2,…Ot , | ]
q1 , q2 ,...qt 1
我们所要找的,就是T时刻最大的 T (i) 所代表 的那个状态序列
Viterbi算法(续)
1 初始化: (i) b (O ), i N
马尔科夫随机场在金融风险管理中的实际应用经验(Ⅲ)
随着金融市场的日益复杂和风险的增加,金融机构和投资者对于风险管理的需求也日益迫切。
在这样的背景下,数学和统计学方法的应用在金融风险管理中变得越来越重要。
马尔科夫随机场(Markov random field)作为一种概率图模型,在金融领域的风险管理中得到了广泛应用,并取得了一定的实际效果。
本文将介绍马尔科夫随机场在金融风险管理中的实际应用经验。
首先我们来介绍一下马尔科夫随机场的基本概念。
马尔科夫随机场是一种用于描述随机变量之间关系的数学模型,它可以被看作是无向图上的概率分布。
在金融领域,马尔科夫随机场常常用于描述资产价格、风险因子之间的相互关系。
通过建立马尔科夫随机场模型,我们可以对金融市场中的复杂交易关系和风险进行更准确的建模和分析。
在实际应用中,金融机构和投资者可以利用马尔科夫随机场模型对投资组合的风险进行建模和评估。
通过对不同资产价格之间的关联关系进行建模,我们可以更准确地评估投资组合的市场风险和系统性风险。
这对于投资者在动态市场中进行风险管理和资产配置具有重要的意义。
此外,马尔科夫随机场模型还可以用于金融市场中的风险事件的预测和监测。
通过对金融市场中的各种风险因子进行建模,我们可以更准确地预测市场风险事件的发生概率和影响程度。
这对于金融机构和监管部门在风险监测和预警方面具有重要的意义。
除了在金融市场中的风险管理领域,马尔科夫随机场模型还可以应用于金融衍生品定价和风险对冲。
通过对金融衍生品价格的时间序列进行建模,我们可以更准确地进行期权定价和风险管理。
这对于金融机构在交易和风险对冲时具有重要的意义。
在实际应用中,通过对马尔科夫随机场模型的建立和参数估计,我们可以更准确地进行金融风险管理和决策。
而且,由于马尔科夫随机场模型具有良好的数学性质和计算方法,因此在实际应用中具有较高的可行性和有效性。
在结尾处,我们可以看到,马尔科夫随机场在金融风险管理中的实际应用经验丰富而多样。
通过对金融市场中的复杂交易关系和风险进行建模和分析,我们可以更准确地评估投资组合的市场风险和系统性风险,更准确地预测市场风险事件的发生概率和影响程度,更准确地进行金融衍生品定价和风险管理。
《马尔科夫随机场》课件

马尔科夫随机场与概率图模型
1 贝叶斯网络
介绍贝叶斯网络和马尔科夫随机场之间的区 别,以及它们的联系。
2 隐马尔科夫模型
介绍隐马尔科夫模型和马尔科夫随机场之间 的异同,以及它们的优势和局限性。
马尔科夫随机场与深度学习
卷积神经网络
介绍卷积神经网络与马尔科夫随机场之间的关系, 以及卷积神经网络在图像分割中的应用。
循环神经网络
介绍循环神经网络与马尔科夫随机场之间的联系, 以及循环神经网络在自然语言处理中的应用。
马尔科夫随机场的实例分析
1
图像分割
以图像分割为例,讲解马尔科夫随机场在该领域中的应用和相应的算法。
2
文本分类
以文本分类为例,讲解马尔科夫随机场在该领域中的应用和相应的算法。
《马尔科夫随机场》PPT 课件
介绍马尔科夫随机场的概念和基本理论,以及与概率图模型的联系。
马尔科夫随机场的应用
自然语言处理
介绍马尔科夫随机场在自然语言处理中的应用, 以及文本分类中的应用,以 及相关领域。
学习马尔科夫随机场的方法
1
马尔科夫机场的学习方法
介绍马尔科夫随机场中的Gibbs 抽样算法,以及实现方式。
前向-后向算法
介绍马尔科夫随机场中的前向-后 向算法,以及其使用场景。
总结与展望
1
优缺点
介绍马尔科夫随机场的优缺点,以及应用场景。
2
发展趋势
分析未来马尔科夫随机场的发展趋势,以及应用前景。
3
学习资源
推荐一些学习马尔科夫随机场的优质资源和书籍。
介绍马尔科夫机场的学习方法,以及条件随机场的概念。
2
概率无向图模型
介绍概率无向图模型的概念,以及在马尔科夫随机场中的使用。
无向图模型(马尔科夫随机场)

19 无向图模型(马尔科夫随机场)19.1 介绍在第十章,我们讨论了图形化模型(DGMs),通常称为贝叶斯网。
然而,对于某些域,需要选择一个方向的边即(DGM), 例如,考虑建模一个图像。
我们可能会假设相邻像素的强度值是相关的。
我们可以创建一个DAG模型的2D拓扑如图19.1所示。
这就是所谓的因果MRF或马尔可夫网。
然而,它的条件独立性通常不好。
另一种方法是使用anundirected图形化模型(UGM),也称为马尔可夫随机场(MRF)或马尔可夫网络。
这些不需要我们指定边缘方向,在处理一些问题,如图像分析和空间统计数据时显得更自然。
例如,一个无向二维点阵显示(如图19.1(b));现在每个节点的马尔科夫Blanket只是最近邻节点,正如我们在19.2节所示的那样。
粗略地讲,在建立在DGMs上的UGMs的主要优点是:(1)它们是对称的,因此对某些领域更“自然”,如空间或关系数据;(2)Discriminativel UGMs(又名条件随机域,或CRFs),它定义了条件概率密度p(y|x),要比Discriminativel UGMs更好,我们在19.6.1节中解释原因。
相比于DGMs,UGMs的主要缺点是:(1)参数是可很难解释及模块化程度较差,我们在19.3节解释原因;(2)参数估计计算代价更高,原因我们在19.5节解释。
19.2 UGMs的条件独立性19.2.1UGMs通过简单的图分离定义CI关系如下:对于节点集的A,B,C,我们说X A ⊥G X B | X C,如果从在图G中把A从B中分离出来。
这意味着,当我们删除所有C 中的节,如果在A上没有任何连接的路径到B,那么CI 属性holds。
这就是所谓的UGMs的全局马尔可夫性质。
例如,在图19.2(b),有{ 1,2 }⊥{ 6、7 } | { 3、4、5 }。
图19.1节点的节点集呈现t有条件地独立于所有其他节点图为t的马尔科夫blanket;我们将表示通过mb(t)。
马尔可夫随机场的原理与应用

马尔可夫随机场的原理与应用马尔可夫随机场(Markov Random Field,MRF)是一种数学模型,用于描述随机变量之间的关联关系。
它被广泛应用于图像处理、模式识别、计算机视觉等领域,具有很高的实用价值。
本文将介绍马尔可夫随机场的原理以及其在实际应用中的相关技术。
一、马尔可夫随机场的原理马尔可夫随机场是一种无向图模型,用于描述随机变量之间的条件依赖关系。
它基于马尔可夫性质,即给定某个节点的取值,该节点与其相邻节点之间的取值是无关的。
这个性质使得马尔可夫随机场在建模多变量关联问题时十分有用。
马尔可夫随机场由两个要素构成:节点和势函数。
节点表示随机变量,势函数表示节点之间的依赖关系。
通常,这个依赖关系可以通过概率分布来表达。
势函数的定义需要满足一定条件,以保证模型的合理性和可解性。
二、马尔可夫随机场的应用1. 图像分割马尔可夫随机场可以应用于图像分割问题。
图像分割是将图像划分成不同的区域或对象的过程。
通过定义节点和势函数,可以建立马尔可夫随机场模型,利用节点之间的条件依赖关系,实现图像的自动分割。
2. 目标识别在计算机视觉领域,目标识别是一个重要的研究方向。
马尔可夫随机场可以应用于目标识别问题,通过定义节点和势函数,对图像中的目标进行建模和推断。
这可以帮助计算机识别和理解图像中的目标物体,提高自动化处理的准确性和效率。
3. 人脸识别人脸识别是一种重要的生物特征识别技术,广泛应用于安全监控、人脸支付等领域。
马尔可夫随机场可以应用于人脸识别问题,通过建立人脸的马尔可夫随机场模型,对人脸的特征和结构进行建模和分析,实现人脸的自动识别。
4. 文本挖掘在自然语言处理领域,文本挖掘是一项重要的研究任务。
马尔可夫随机场可以应用于文本挖掘问题,通过建立文本的马尔可夫随机场模型,对文本的结构和语义进行建模和分析,实现文本的自动分类、情感分析等任务。
三、总结马尔可夫随机场是一种重要的数学模型,具有广泛的应用价值。
高斯马尔科夫场
马尔可夫随机场(MRF)模型是一种描述图像结构的概率模型,是一种较好的描述纹理的方法。
它是建立在MRF 模型和 Bayes 估计基础上,按统计决策和估计理论中的最优准则确定问题的解。
其突出特点是通过适当定义的邻域系统引人结构信息,提供了一种一般用来表达空间上相关随机变量之间相互作用的模型,由此所生成的参数可以描述纹理不同方向、不同形式的集聚特征,更符合人的感官认识。
MRF 模型及其应用主要有两个分支:一是采用与局部Markov 性描述完全等价的Gibbs 分布;另一支是假设激励噪声满足高斯(Gauss)分布,从而得到一个由空域像素灰度表示的差分方程,称作高斯--马尔可夫随机场模型。
在实际应用中,由于高斯--马尔可夫随机场(GMRF)的计算量相对较小,获得了较为广泛的应用。
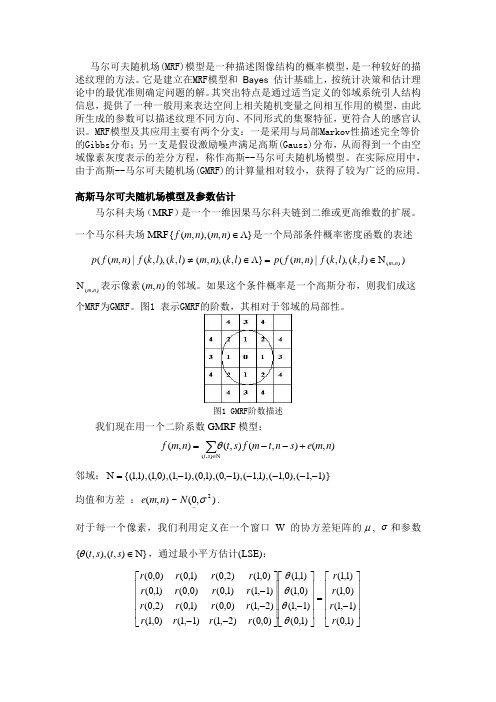
高斯马尔可夫随机场模型及参数估计马尔科夫场(MRF )是一个一维因果马尔科夫链到二维或更高维数的扩展。
一个马尔科夫场MRF }),(),,({Λ∈n m n m f 是一个局部条件概率密度函数的表述)),(),,(|),((}),(),,(),(),,(|),((),(n m l k l k f n m f p l k n m l k l k f n m f p N ∈=Λ∈≠),(n m N 表示像素),(n m 的邻域。
如果这个条件概率是一个高斯分布,则我们成这个MRF 为GMRF 。
图1 表示GMRF 的阶数,其相对于邻域的局部性。
图1 GMRF 阶数描述我们现在用一个二阶系数GMRF 模型:),(),(),(),(),(n m e s n t m f s t n m f s t +--=∑N∈θ邻域:)}1,1(),0,1(),1,1(),1,0(),1,0(),1,1(),0,1(),1,1{(------=N 均值和方差 :),0(~),(2σ-N n m e .对于每一个像素,我们利用定义在一个窗口W 的协方差矩阵的μ, σ和参数}),(),,({N ∈s t s t θ,通过最小平方估计(LSE):⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----)1,0()1,1()0,1()1,1()1,0()1,1()0,1()1,1()0,0()2,1()1,1()0,1()2,1()0,0()1,0()2,0()1,1()1,0()0,0()1,0()0,1()2,0()1,0()0,0(r r r r r r r r r r r r r r r r r r r r θθθθ∑N∈-=),(2),(),()0,0(s t s t r s t r θσ∑∈--=Wn m ws n t m f n m f N s t r ),(),(),(1),(∑∈=Wn m wn m f N ),(),(1μw N 表示窗口W 的像素的个数。
马尔科夫
• • • •
马尔科夫过程 状态转移矩阵 马尔科夫预测 隐马尔科夫过程
马尔科夫过程
• 随机变量:一变量x,能随机地取数据(但不能准确地预言它取何 值),而对于每一个数值或某一个范围内的值有一定的概率,那么称 x为随机变量。 • 在试验过程中,随机变量可能随某一参数(不一定是时间)的变化而 变化。 • 随机函数:如测量大气中空气温度变化x = x(h),随高度变化。这种 随参变量而变化的随机变量称为随机函数。 • 随机过程:以时间t作参变量的随机函数称为随机过程。
例:
• 荷花池里有N张荷叶,在时刻Tn时,它所在的那张荷叶, 称为青蛙现在所处的状态。那么.青蛙在未来处于什么状 态,只与它现在所处的状态i (i=l,2,…,N)有关,与它 以前在哪张荷叶上无关。记Xn为时刻Tn青蛙所处的状态。 • P(Xn+1=j/Xn=i)=Pi,j , 其中,i,j=1,2,…N. 表示在Tn时刻 青蛇在第i张荷叶上。在下一个时刻Tn+1跳到第j张荷叶上 的可能性,又称为从状态i经一步转移到j的概率,简称为 一步转移概率。将这些 Pi,j依序排列起来,就构成一个矩 阵,叫做转移概率矩阵。 • P11 P12 ... P1n P = [ P21 P22 ... P2n ] • ... • Pn1 Pn2 ... Pnn
基于马尔科夫随机场的图像分割
• 随机场:当给每一个位置中按照某种分布 随机赋予相空间的一个值之后,其全体就 叫做随机场。 • 其中有两个概念:位置(site),相空间 (phase space)。 • 马尔可夫随机场:给随机场的每个“位置”, 赋予相空间里不同的值。那么这些值的集 合就是一个马尔科夫随机场。
• β表示双点基团参数,通常取值在0.5~1.0之间。 • 假设图像的概率分布服从高斯分布,其各个标记类别m 的均值和方差 分别为μm和σm,其似然能量函数可以表示为
马尔科夫随机场在自然语言处理中的应用方法(九)
马尔科夫随机场在自然语言处理中的应用方法引言随着人工智能技术的不断发展,自然语言处理成为了人工智能领域的一个重要研究方向。
在自然语言处理中,马尔科夫随机场(Markov Random Field, MRF)被广泛应用于诸如文本分类、命名实体识别、语义分析等任务中。
本文将深入探讨马尔科夫随机场在自然语言处理中的应用方法。
马尔科夫随机场的基本概念首先,我们需要了解马尔科夫随机场的基本概念。
马尔科夫随机场是一种用于建模随机变量之间关系的概率图模型。
它由一个无向图和一组概率分布组成,其中无向图的节点表示随机变量,边表示随机变量之间的相互作用关系,概率分布则描述了给定条件下各个随机变量的联合概率分布。
马尔科夫随机场满足马尔科夫性质,即给定一个节点的邻居节点的取值,该节点的取值与其他节点的取值独立。
马尔科夫随机场的概率分布可以用势函数表示,通过势函数可以描述节点和节点之间的关联关系。
马尔科夫随机场在文本分类中的应用在自然语言处理中,文本分类是一个重要的任务,它可以帮助我们对文本进行自动分类,比如将一封电子邮件分类为垃圾邮件或非垃圾邮件。
马尔科夫随机场可以用于建模文本分类任务中文本的词语之间的关联关系。
通过构建马尔科夫随机场模型,可以将文本中的词语作为节点,词语之间的关联关系作为边,从而建模词语之间的依赖关系。
通过对文本进行建模,可以更好地捕捉文本的语义信息,提高文本分类的准确性。
马尔科夫随机场在命名实体识别中的应用除了文本分类,马尔科夫随机场还可以应用于命名实体识别任务。
命名实体识别是指从文本中识别并抽取出具有特定意义的实体,比如人名、地名、组织机构名等。
在命名实体识别任务中,马尔科夫随机场可以用于建模文本中不同实体之间的关系。
通过构建马尔科夫随机场模型,可以将文本中的词语作为节点,词语之间的关联关系作为边,从而对文本中的命名实体进行建模。
通过对命名实体进行建模,可以更好地捕捉不同实体之间的关联关系,提高命名实体识别的准确性。
马尔科夫随机场的基本概念介绍(九)
马尔科夫随机场的基本概念介绍随机场是一种用来描述随机变量之间相关关系的数学模型。
而马尔科夫随机场(Markov random field, MRF)则是一种特殊的随机场模型,它在许多领域中都有着广泛的应用,比如图像处理、自然语言处理、计算机视觉等。
本文将介绍马尔科夫随机场的基本概念,包括定义、特性、模型表示和应用等方面。
概率图模型是表示随机变量之间依赖关系的一种工具。
它分为有向图模型和无向图模型两类。
马尔科夫随机场属于无向图模型,也被称为马尔科夫网。
它的基本单位是随机变量的集合和这些随机变量之间的关系。
在马尔科夫随机场中,给定一组随机变量,任意两个随机变量之间的条件独立性都可以由马尔科夫性质来刻画。
马尔科夫性质是马尔科夫随机场的一个重要特征。
它指的是在给定随机变量的某个子集的条件下,剩余的随机变量与这个子集条件独立。
这一性质使得马尔科夫随机场在描述大规模复杂系统时具有很强的实用性。
以图像处理为例,一幅图像可以看作是一个像素点组成的随机变量集合,通过定义合适的邻接关系,可以构建一个马尔科夫随机场模型来描述图像中像素点之间的相关性。
马尔科夫随机场的模型表示通常采用势函数(potential function)来描述随机变量之间的关系。
势函数是对随机变量组合的一种量化方式,它描述了随机变量组合的可能性大小。
在马尔科夫随机场中,势函数通常由一组最大团(maximal cliques)来确定。
最大团是指一个子集中的所有随机变量两两之间都有连接的情况。
通过最大团和势函数的定义,可以得到整个随机场的联合概率分布。
在实际应用中,马尔科夫随机场有着广泛的应用。
在自然语言处理领域,马尔科夫随机场常常用来进行词性标注和命名实体识别等任务。
在图像处理领域,马尔科夫随机场可以用来进行图像分割和目标识别等工作。
此外,在模式识别、计算机视觉、社交网络分析等领域也都有着马尔科夫随机场的应用。
总而言之,马尔科夫随机场作为一种重要的概率图模型,具有良好的数学性质和广泛的应用价值。
随机场马尔可夫随机场条件随机场

随机场、马尔可夫随机场、条件随机场最近看视觉显著性方面的文章,看到一篇2011年2月的PAMI文章Learning to Detect a Salient Object,论文提出一种基于条件随机场(CRF)的特征组合方法将显著目标提取问题看做二值标记问题来解决。
之前没有接触过条件随机场,经过两天的学习,现在总结一下并巩固梳理:(1)随机场:在概率论中, 由样本空间Ω = {0, 1, ..., G 1}n取样构成的随机变量Xi所组成的S= {X1, ..., Xn}。
若对所有的ω∈Ω下式均成立,则称π为一个随机场。
一些已有的随机场如:马尔可夫随机场(MRF), 吉布斯随机场(GRF), 条件随机场(CRF), 和高斯随机场。
随机场包含两个要素:位置(site),相空间(phase space)。
当给每一个位置中按照某种分布随机赋予相空间的一个值之后,其全体就叫做随机场。
我们不妨拿种地来打个比方。
“位置”好比是一亩亩农田;“相空间”好比是种的各种庄稼。
我们可以给不同的地种上不同的庄稼,这就好比给随机场的每个“位置”,赋予相空间里不同的值。
所以,俗气点说,随机场就是在哪块地里种什么庄稼的事情。
(2)马尔科夫(Markov)性质:马尔可夫链是随机变量X1, … , Xn 的一个数列。
这些变量的范围,即他们所有可能取值的集合,被称为“状态空间”,而Xn 的值则是在时间n 的状态。
如果Xn+1 对于过去状态的条件概率分布仅是Xn 的一个函数,则这里x 为过程中的某个状态。
上面这个恒等式可以被看作是马尔可夫性质。
马尔可夫链的在很多应用中发挥了重要作用,例如,谷歌所使用的网页排序算法(PageRank)就是由马尔可夫链定义的。
通俗说,离当前因素比较遥远(这个遥远要根据具体情况自己定义)的因素对当前因素的性质影响不大。
简单说,就叫健忘。
拿天气来打个比方。
如果我们假定天气是马尔可夫的,其意思就是我们假设今天的天气仅仅与昨天的天气存在概率上的关联,而与前天及前天以前的天气没有关系。
随机场-深入浅出

随机场-Random Field2010年11月03日⁄技术, 科研⁄共 3875字⁄评论数 2⁄被围观 3,708+随机场(Random field)定义如下:在概率论中, 由样本空间Ω = {0, 1, ..., G− 1}n取样构成的随机变量X所组成的S = {X1, ..., X n}。
若对所有的ω∈Ωi下式均成立,则称π为一个随机场。
π(ω) > 0.一些已有的随机场如:马尔可夫随机场(MRF), 吉布斯随机场 (GRF), 条件随机场 (CRF), 和高斯随机场。
转载的东西不靠谱。
有空自己学习写下来。
----------------------------马尔可夫随机场(Markov Random Field),也有人翻译为马尔科夫随机场,它包含两层意思:一是什么是马尔可夫,二是什么是随机场。
马尔可夫一般是马尔可夫性质的简称。
它指的是一个随机变量序列按时间先后关系依次排开的时候,第N+1时刻的分布特性,与N时刻以前的随机变量的取值无关。
拿天气来打个比方。
如果我们假定天气是马尔可夫的,其意思就是我们假设今天的天气仅仅与昨天的天气存在概率上的关联,而与前天及前天以前的天气没有关系。
其它如传染病和谣言的传播规律,就是马尔可夫的。
随机场包含两个要素:位置(site),相空间(phase space)。
当给每一个位置中按照某种分布随机赋予相空间的一个值之后,其全体就叫做随机场。
我们不妨拿种地来打个比方。
“位置”好比是一亩亩农田;“相空间”好比是种的各种庄稼。
我们可以给不同的地种上不同的庄稼,这就好比给随机场的每个“位置”,赋予相空间里不同的值。
所以,俗气点说,随机场就是在哪块地里种什么庄稼的事情。
好了,明白了上面两点,就可以讲马尔可夫随机场了。
还是拿种地打比方,如果任何一块地里种的庄稼的种类仅仅与它邻近的地里种的庄稼的种类有关,与其它地方的庄稼的种类无关,那么这些地里种的庄稼的集合,就是一个马尔可夫随机场。
马尔科夫随机场在金融风险管理中的应用技巧(Ⅰ)
马尔科夫随机场在金融风险管理中的应用技巧一、马尔科夫随机场的基本原理马尔科夫随机场是一种用来描述随机现象的数学模型,其基本原理是假设未来的状态只依赖于当前状态,与过去的状态无关。
在金融风险管理中,马尔科夫随机场可用于建立模型,对金融市场的波动和风险进行预测和管理。
二、金融市场的风险特点金融市场的波动性和不确定性是金融风险管理中的重要问题。
市场中的各种因素相互影响,导致金融资产价格的波动,从而带来风险。
马尔科夫随机场可以捕捉到这些复杂的市场因素之间的关联性,为金融风险管理提供有力的工具。
三、马尔科夫随机场在金融市场波动性预测中的应用通过建立马尔科夫随机场模型,可以对金融市场的波动性进行预测。
通过对历史数据进行分析,可以建立马尔科夫链,从而推断未来的市场波动情况。
这对于投资者进行风险管理和资产配置具有重要意义。
四、马尔科夫随机场在金融风险定价中的应用金融市场的风险定价是金融领域重要的课题之一。
马尔科夫随机场可以将市场中的不同因素进行整合,从而对金融资产的风险进行定价。
这有助于投资者更加准确地评估风险和收益,制定更加合理的投资策略。
五、马尔科夫随机场在金融风险监测中的应用金融风险监测是金融机构日常工作的重要组成部分。
通过应用马尔科夫随机场模型,可以对金融市场中的风险因素进行监测和预警。
及时发现和应对风险,有助于避免金融危机的发生,保障金融市场的稳定和安全。
六、马尔科夫随机场在金融衍生品定价中的应用金融衍生品是金融市场中常见的交易工具,其定价是金融领域的重要问题。
马尔科夫随机场可以对不同的金融市场因素进行建模,从而对金融衍生品的风险和定价进行分析和预测。
这有助于金融机构和投资者更加准确地对衍生品进行定价和交易。
七、马尔科夫随机场在金融风险管理中的挑战与前景尽管马尔科夫随机场在金融风险管理中有着广泛的应用前景,但同时也面临着一些挑战。
金融市场的复杂性和不确定性使得建立准确的马尔科夫随机场模型成为一项挑战。
马尔科夫随机场在粒子物理实验中的数据分析应用(十)
马尔科夫随机场在粒子物理实验中的数据分析应用一、马尔科夫随机场的基本概念马尔科夫随机场是一种用于描述随机系统的数学模型,它基于马尔科夫性质,即未来状态只依赖于当前状态而与过去状态无关。
在粒子物理实验中,我们经常需要分析复杂的数据,马尔科夫随机场可以帮助我们理解这些数据的内在规律。
马尔科夫随机场由一组随机变量组成,这些随机变量之间存在着一定的关联关系。
它可以用于描述空间中各个点的状态及其之间的相互作用。
在实际应用中,我们常常需要利用马尔科夫随机场来推断未知的变量状态,进行模式识别或者预测。
二、粒子物理实验中的数据分析在粒子物理实验中,我们经常需要收集大量的数据来研究基本粒子的性质和相互作用。
这些数据往往非常复杂,包含了大量的噪音和干扰,因此需要借助各种数据分析方法来提取有用的信息。
马尔科夫随机场可以用于粒子物理实验数据的分析,帮助我们理解粒子之间的关联关系和作用机制。
通过对实验数据进行建模,我们可以利用马尔科夫随机场来推断未知的粒子状态,从而揭示粒子之间的隐含规律。
三、马尔科夫随机场在粒子物理实验中的应用在实际应用中,马尔科夫随机场可以用于对粒子物理实验数据进行模式识别和预测。
通过对实验数据的建模,我们可以利用马尔科夫随机场来识别不同粒子之间的相互作用模式,从而进一步理解粒子的性质和行为。
另外,马尔科夫随机场还可以用于对实验数据进行降噪和过滤,提高数据的质量和可靠性。
通过建立合适的随机场模型,我们可以有效地去除噪音和干扰,从而更准确地分析实验数据,发现其中的隐藏信息。
四、结语马尔科夫随机场是一种强大的数据分析工具,它在粒子物理实验数据的分析中发挥着重要作用。
通过对实验数据的建模和分析,我们可以利用马尔科夫随机场来揭示粒子之间的关联关系和相互作用规律,从而更深入地理解粒子的性质和行为。
期待未来,马尔科夫随机场在粒子物理领域的应用将会更加广泛和深入。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
马尔科夫
马尔科夫随机过程就是,下一个时间点的状态只与当 前的状态有关系,而与以前的状态没有关系,即未来 的状态决定于现在而不决定于过去。 其未来由现在决定的程度,使得我们关于过去的知识 丝毫不影响这种决定性。这种在已知 “现在”的条件 下,“未来”与“过去”彼此独立的特性就被称为马 尔科夫性,具有这种性质的随机过程就叫做马尔科夫 过程
荷花池里有N张荷叶,在时刻Tn时,Xn为时刻Tn青蛙所处的状态。 P(Xn+1=j/Xn=i)=Pi,j , 其中,i,j=1,2,…N. 表示在Tn时刻青蛙在 第i张荷叶上。在下一个时刻Tn+1跳到第j张荷叶上的可能性,又 称为从状态i经一步转移到j的概率,简称为一步转移概率。 将这些 Pi,j依序排列起来,就构成一个矩阵,叫做转移概率矩阵 。 P11 P12 ... P1n P = [ P21 P22 ... P2n ] ... Pn1 Pn2 ... Pnn
马尔科夫过程
设有随机过程 i 0 , i1 , P{ X 就称
n 1
X n,n T ,若 对 于 任 意 正 整 数 n T 和 任 意 的
i0 , ,X in } P { X in 1 | X in }
, in 1 I , 条 件 概 率 满 足 in 1 | X
S(1)=S(0)*P=(0.54, 0.20, 0.26),这个月A,B,C电脑 的市场占有率为54%,20%,26% S(2)=S(1)*p=S(0)*P^2=(0.492, 0.248, 0.26),下个 月A,B,C电脑的市场占有率为49.2%,24.8%,26%
隐马尔科夫过程
与马尔科夫相比,隐马尔科 夫模型则是双重随机过程, 不仅状态转移之间是个随机 事件,状态和输出之间也是 一个随机过例如:我在不同天气状态下去做一些事情的概率不同,(观察状态)天 气状态集合为{下雨,阴天,晴天},(隐藏状态)事情集合为{宅着,自 习,游玩}。假如我们已经有了转移概率和输出概率,即P(天气A|天气B) 和P(事情a|天气A)的概率都已知道,那么我们可以解决: 假如一周内的天气变化是 下雨->晴天->阴天->下雨->阴天->晴天->阴 天,那么我这一周 自习->宅着->游玩->自习->游玩->宅着->自习的概 率。 假如一周内的天气变化是 下雨->晴天->阴天->下雨->阴天->晴天->阴 天,那我们这一周最有可能的做事序列。 这些可以通过隐马尔科夫模型得到结果。
= { 1 ,2 , L } 表 示 状 态 空 间 , 即 随 机 场 中 的 相 空 间
图像分割问题要求解的是满足最大后验概率准则的对每 个像素的分类标号,我们统一称为标号场,记为X。 X ( x s 1, x s 2 , ..., x s M * N )
0 n n 1 n
X n,n T为 马 尔 科 夫 过 程 , 该 随 机 过 程 的 统 计 特 性
完全由条件概率所决定
例如:假定天气是马尔科夫的,其意思 就是我们假设今天的天气仅仅与昨天的 天气存在概率上的关联,而与前天及前 天以前的天气没有关系。其它如传染病 和谣言的传播规律,都是马尔科夫的。
马尔科夫图像模型
MRF 将图像模拟成一个随机变量组成的 网格,其中的每一个变量对明确的对其 自身之外的随机变量组成的邻近基团具 有依赖性。该模型考虑每个像元关于它 的邻近像元的条件分布,有效地描述图 像的局部统计特性。
基本定义
设 S { (i, j ) | 1 i M ,1 j N }表 示 M N 位 置 的 有 限 格 点 集 即随机场中的位置
马尔科夫随机场
马尔科夫随机场包含两层意思 马尔科夫性质 随机场
随机场
当给每一个位置中按照某种分布随机赋予相空间的一 个值之后,其全体就叫做随机场。其中有两个概念: 位置(site),相空间(phase space)。我们可以拿 种地来打个比方。“位置”好比是一亩亩农田;“相 空间”好比是要种的各种庄稼。我们可以给不同的地 种上不同的庄稼,这就好比给随机场的每个“位置”, 赋予相空间里不同的值。所以,随机场就好比是在哪 块地里种什么庄稼的事情。
马尔科夫随机场
同样拿种地打比方,如果任何一块地里种的庄稼 的种类仅仅与它邻近的地里种的庄稼的种类有关,与 其它地方的庄稼的种类无关,那么这些地里种的庄稼 的集合,就是一个马尔可夫随机场。
马尔科夫随机场与图像的关系
一维马尔科夫随机过程很好的描述随机过程中 某点的状态只与该点之前的一个点的状态有关 系。 对于定义在二维空间上的图像,也可以将它看 为一个二维随机场。那么就存在二维马尔科夫 随机场,将时间上的马尔科夫性转换到空间上, 考虑空间的关系,二维MRF的平面网格结构可以 较好的表现图像中像素之间的空间相关性。
马尔科夫预测
例如:A,B,C三个厂生产的电脑上公司在某地区市场上的 占有率分别为0.3, 0.2 ,0.5。根据市场调查得知、顾客 的流动情况如下: A B C A B C 0.4 0.6 0.6 0.3 0.3 0.1 0.3 0.1 0.3
市场的初始状态为S(0)=(0.3,0.2,0.5) 转移概率P为 0.4 0.3 0.3 P = [ 0.6 0.3 0.1 ] 0.6 0.1 0.3
该图上面那行是一个马尔科夫转移 过程,X1, X2,…… XT状态称为隐藏 状态,下面这一行则是输出,即我 们可以观察到的值,称为观察状态 ,观察状态的集合表示为 O={O1,O2,O3,…OM}。
隐马尔科夫也比马尔科夫多了一个 假设,即输出仅与当前状态有关, 可以用如下公式表示: P(O1,O2,…,Ot|S1,S2,…,St)=P(O1|S1 )*P(O2|S2)*...*P(Ot|St) O1,O2,…,Ot为从时刻1到时刻t的观 测状态序列,S1,S2,…,St则为隐藏 状态序列。