交通信号控制与SCATS系统.综述
交通信号控制与SCATS系统

2019/10/23
28
国家精品课程:交通控制与管理
交通信号控制
控制基本原理
SCATS系统
2019/10/23
29
国家精品课程:交通控制与管理
交通信号控制
系统控制的核心理念
通过系统的合理配时“均衡”路网交通流量,达 到对车辆、路网的“平衡”控制,提高整体效率!
在系统控制时综合考虑路网交通,如“绿波”设 置也是有条件的,如考虑到绿波的下游是否有“消 化”能力。
2019/10/23
27
国家精品课程:交通控制与管理
交通信号控制
SCATS组成结构——通讯
SCATS的通讯
中央管理级、区域管理控制、用户端、与集成平台 等之间的通信是通过TCP/IP协议通讯;
区域控制计算机与路口控制器之间的通讯可以根据 条件通过多种方式实现:
1、FSK调制电话线通讯(沈阳、上海…) 2、点对点光纤RS232通讯(杭州、宁波、广州、合 肥…) 3、TCP/IP网络通讯(重庆、苏州、上海(部分)….) 4、无线(GSM)网络通讯(广州(部分)…) 5、以上多种形式并存
交通信号控制
SCATS组成结构——路口控制器
SCATS路口控制器(ECLIPSE)
• RTA授权认证产品 • 针对路口特征的软件定义 • 多相位控制 • 特殊控制 • 高可靠性 • 高可维护性
2019/10/23
20
国家精品课程:交通控制与管理
交通信号控制
SCATS组成结构——路口控制器
SCATS 区域控制器
区域交通信号控制—— 上海的SCATS系统
上海市交警总队高工:韩如文老师
2019/10/23
1
国家精品课程:交通控制与管理
基于scats系统信号控制方案的设计与优化

基于scats系统信号控制方案的设计与优化基于scats系统信号控制方案的设计与优化一、引言在城市交通管理中,信号控制是至关重要的一环。
而scats系统作为一种智能交通信号控制系统,能够对交通流量进行实时检测和优化调整,极大地提高了交通效率和路口通行能力。
本文将从设计与优化的角度出发,深入探讨基于scats系统的信号控制方案。
二、scats系统简介scats系统(Sydney Coordinated Adaptive Traffic System)是一种由澳大利亚悉尼大学研发的智能交通信号控制系统。
它利用传感器、相机和计算机技术,对路口交通流量实时进行监测和分析,根据实际情况自适应地调整信号灯的时长,从而实现交叉口的智能化控制。
三、scats系统信号控制方案的设计1. 传感器的布置和选择在设计scats系统的信号控制方案时,首先需要考虑传感器的布置和选择。
不同类型的传感器,比如车辆检测器、压感线圈等,能够提供不同的交通数据,因此合理选择和布置传感器对于系统的性能至关重要。
2. 数据的采集与分析scats系统通过收集传感器获取的交通数据,进行实时的数据分析和处理。
这一过程需要高效的算法和数据处理能力,以确保系统能够快速、准确地获取交通状况,并进行信号控制决策。
3. 信号灯的自适应调整根据实际交通情况,scats系统能够自主地调整信号灯的时长,以适应不同时间段和交通流量的变化。
这就要求系统能够准确地预测交通流量并作出合理的控制决策,以实现交叉口信号的自适应调整。
四、scats系统信号控制方案的优化1. 交通流量预测算法的优化为了使scats系统能够更好地进行信号控制,需要对交通流量预测算法进行优化。
通过引入机器学习、深度学习等技术,提高算法的准确度和智能化水平,从而提升系统的信号控制效果。
2. 多模式联合控制策略由于城市交通具有复杂性和多样性,scats系统的信号控制方案需要考虑到不同路口、不同时间段和不同交通流量情况下的适应性。
交通信号控制与SCATS系统

车辆信号灯组 车辆检测器
逻辑模块
检测 输入口
特征数据
8-32个输出
行人按钮 路口控制器
行人信号灯组
2016/11/29
21
国家精品课程:交通控制与管理
交通信号控制
SCATS组成结构——信号机Eclipse
主要特点: • RTA最新TSC4认证的SCATS控制 器 • 最大设计:32灯组输出+48通道检 测器输入+48路干触点输入 • 冲突监视 • 特殊用途输入、输出:12路 • 通讯:FSK、RS232 控制模式: – 手动、定时、感应控制; – 降级无线缆协调; – 黄闪; – 紧急呼叫优先; – 公交优先
•
SCATS使用个人计算机(PC)作为区域计算机,每台PC机可 以控制128个路口。当系统超过这个数量时,增加区域计算 机即可。
2016/11/29 17 国家精品课程:交通控制与管理
交通信号控制
区域机的作用
SCATS使用运行Windows 的PC机为区域计算机,用 异步串口接口和调制解调器(使用电话线)或ATM等网络 等为通讯手段,将区域计算机和路口控制器连接在一起。 这使得计算机硬件和操作系统软件的维护工作非常容易进 行。 在线控制
国家精品课程:交通控制与管理
•
控制模块机箱
– – – –
2016/11/29
23
交通信号控制
SCATS组成结构——信号机Eclipse
2016/11/29
24
国精品课程:交通控制与管理
交通信号控制
SCATS组成结构——信号机Eclipse
2016/11/29
25
国家精品课程:交通控制与管理
交通信号控制
交通控制SCOOT系统与SCATS系统的比较讲解学习
系统研发和维 护
SCATS系统在国内没有研发 团队和维护队伍,无法对用户 的定制化需求及维护要求作出 及时响应
SCOOT系统在国内有专门的研 发力量和维护团队,可以及时 响应用户的定制化需求及维护 要求
系统实施效果
从控制效果来看,SCATS对 旅行时间改善效果有限,对停 车次数的减少大概是9%左右
SCOOT数据经过处理可以得到 超过十种交通数据
系统人机界面
采用较为传统的操作界面,大 多数为英文界面,且未采用标 准GIS矢量地图,人机友好性 有待提高
已针对国内应用专门开发,全 部采用中文界面,基于标准的GIS矢量地图,人机交互友 好,操作方便,易于维护
工程维护
系统结构不开放,需要事先为 每个路口定义控制方案,而且 需要定期更新,系统维护成本 较高
SCOOT每个阶段均做优化,而 且可以精确到秒级
比较项
SCATS系统
SCOOT系统
选择一次;
相位差优化
关于相位差的优化,SCATS系统同样是从事先确定的数值 中选择
SCOOT系统通过模型计算每个 路口针对各个方于米用事先定义好的若干方 案,系统对于突发性的交通流 缺之应对措施
交 通 控 制SCOOT系 统
与SCATS系 统的比较
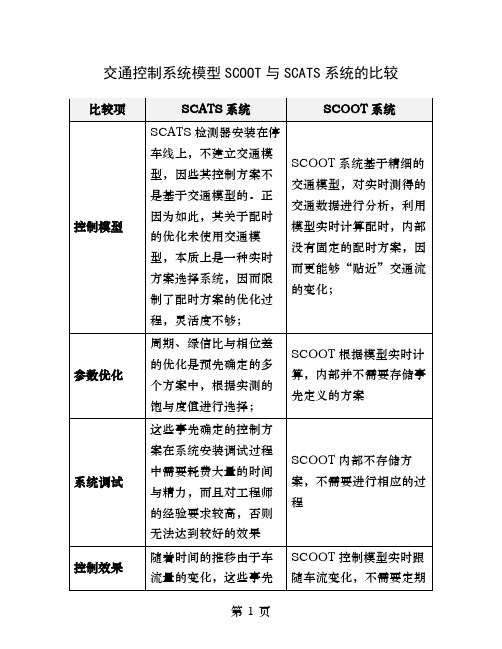
交通控制系统模型
比较项
SCATS系统
SCOOT系统
控制模型
SCATS检测器安装在停车线 上,不建立交通模型,因些其 控制方案不是基于交通模型 的。正因为如此,其关于配时 的优化未使用交通模型,本质 上是一种实时方案选择系统, 因而限制了配时方案的优化过 程,灵活度不够;
反之由于SCOOT模型是实时 计算,系统内并没有事先定义 的方案,因而针对突发性的交 通情况同样能够应对
上海的交通信号控制与scats系统20101208
交通信号控制
SCATS组成结构——路口控制器
SCATS路口控制器(ECLIPSE)
• RTA授权认证产品 • 针对路口特征的软件定义 • 多相位控制 • 特殊控制 • 高可靠性 • 高可维护性
2024/1/3
18
国家精品课程:交通控制与管理
交通信号控制
SCATS组成结构——路口控制器
SCATS 区域控制器
SCATS 中央管理
PC
其它 ITS 设备
解调器 & RAS connection
2024/1/3
LAN or WAN 遥远终端
11
SCATS 操作台 (PC’s) 国家精品课程:交通控制与管理
交通信号控制
SCATS系统结构纲要
▪ SCATS中央管理控制级 ▪ SCATS区域管理控制级 ▪ SCATS系统工作站 ▪ SCATS系统的路口控制器-Eclipse ▪ SCATS系统的通讯
✓每个城市应用后,系统都得到快速的扩展。
2024/1/3
9
国家精品课程:交通控制与管理
交通信号控制
结构
SCATS系统
2024/1/3
10
国家精品课程:交通控制与管理
交通信号控制
SCATS系统结构示意图
PSC
Video Wall
PSC
SCATS
PC 区域 1
SCATS
PC 区域 2
SCATS
PC 区域 3
SCATS系统基本原理
高效的“集装箱运输”原理: 1、交通信号最佳工作条件是把交通车流分配为一个个车队(集装箱式)
的通行
2、“红灯”可以起到“整理车流”的作用 3、“车间距”控制原理,与车型无关 4、协调功能
SCATS系统简介

泰科公司
15
SCATS 交通信号控制系统
如果区域计算机出现故障或通讯中断,本地控制器则实施以时间为基础的协调运行,该模式 称为离线模式。在该模式中,相邻的路口信号依时钟协调运行,控制方案按时段选择。同时,本地 车感控制功能参与运行。时钟是由电源频率或晶振实现的。
3 SCATS 结构及通讯......................................................................................... 18
3.1 分布式、分层次控制系统 ..............................................................................................................18 3.2 系统容量 ...................................................................................................................................19 3.3 SCATS 的通讯...........................................................................................................................19
6.1 路口机机箱结构 ........................................................................................................................28 6.2 电气指标 ...................................................................................................................................28 6.3 环境指标: ...............................................................................................................................28 6.4 微处理器 ...................................................................................................................................29 6.5 功能控制模块化 ........................................................................................................................29 6.6 现场控制、编程 ........................................................................................................................29 6.7 极高的可靠性............................................................................................................................29 6.8 PD200 系列车辆检测器 ............................................................................................................29
交通信号控制系统简介

多时段定时控制 multiple intervals fixed-time control 根据交通需求变化情况,把一天的时间分成若干个控制时段,随时间的推移, 按预置的方案自动运行。
感应控制 vehicle actuated control 交叉路口信号机根据车辆检测器测得的交通流数据来调节信号显示时间的控 制方式。
周期 cycle time 信号灯色按设定的相位顺序显示一周所需的时间。
信号灯组 signal light group 一个完整的车辆红、黄、绿三头灯或行人红、绿二头灯的组合。
信号组 signal group 具有同一灯色序列的所有信号灯组的集合。
相位 phase 在一个信号周期内,同时获得通行权的一个或多个交通流的信号显示状态。
上位机 control center 在交通信号控制系统中,能和多台信号机通信并对其进行控制和监视的上端 设备
无电缆协调控制 cableless linking control 信号机之间没有通信链路,根据时钟同步,通过设定相位差来实现交叉路口 交通信号协调的控制方式。
控制方案 control plan 路口关于相位设置、相位序列设置、信号配时的有序集合。
最小绿灯时间 minimum green time 相位绿灯信号必须开启的最短安全时间。
SCATS(Sydney Coordinated Adaptive Traffic System)系统未使用交通模型,是 一种用感应控制对配时方案作局部调整的方案选择系统,属于开环控制方法,限
制了配时方案的优化程度,另外,因检测器安装在停车线处,故相位差的优选可 靠性较差,但在国内以SCATS为代表引入过我国城市最多,因价格、技术支持以及 适应混合交通流状况差而未取得显著效果。
SCATS系统的原理和发展应用
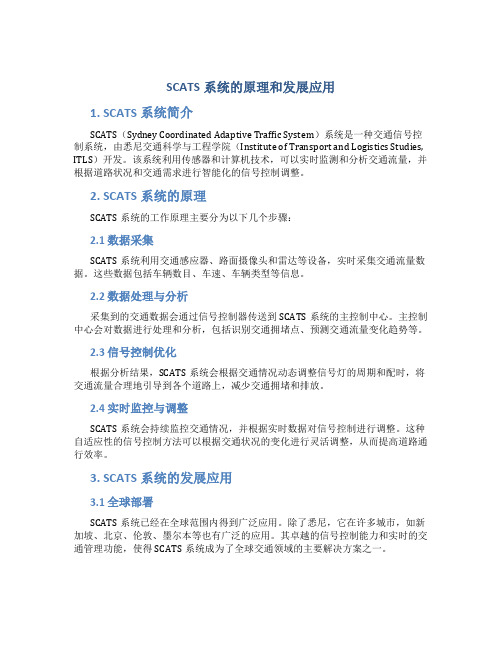
SCATS系统的原理和发展应用1. SCATS系统简介SCATS(Sydney Coordinated Adaptive Traffic System)系统是一种交通信号控制系统,由悉尼交通科学与工程学院(Institute of Transport and Logistics Studies, ITLS)开发。
该系统利用传感器和计算机技术,可以实时监测和分析交通流量,并根据道路状况和交通需求进行智能化的信号控制调整。
2. SCATS系统的原理SCATS系统的工作原理主要分为以下几个步骤:2.1 数据采集SCATS系统利用交通感应器、路面摄像头和雷达等设备,实时采集交通流量数据。
这些数据包括车辆数目、车速、车辆类型等信息。
2.2 数据处理与分析采集到的交通数据会通过信号控制器传送到SCATS系统的主控制中心。
主控制中心会对数据进行处理和分析,包括识别交通拥堵点、预测交通流量变化趋势等。
2.3 信号控制优化根据分析结果,SCATS系统会根据交通情况动态调整信号灯的周期和配时,将交通流量合理地引导到各个道路上,减少交通拥堵和排放。
2.4 实时监控与调整SCATS系统会持续监控交通情况,并根据实时数据对信号控制进行调整。
这种自适应性的信号控制方法可以根据交通状况的变化进行灵活调整,从而提高道路通行效率。
3. SCATS系统的发展应用3.1 全球部署SCATS系统已经在全球范围内得到广泛应用。
除了悉尼,它在许多城市,如新加坡、北京、伦敦、墨尔本等也有广泛的应用。
其卓越的信号控制能力和实时的交通管理功能,使得SCATS系统成为了全球交通领域的主要解决方案之一。
3.2 交通拥堵缓解SCATS系统的应用可以有效地降低交通拥堵。
根据实际情况和交通需求,系统能够自动调整信号配时,合理引导交通流量,从而提高道路通行能力,减少交通拥堵。
3.3 能耗和排放减少由于SCATS系统能够优化信号配时,有效地引导交通流量,这意味着车辆能够以更加流畅的方式行驶,减少了车辆的急刹车和加速情况,从而降低了燃油消耗和尾气排放。
SCATS系统简介
2 SCATS 控制策略 ............................................................................................ 15
scats6可以根据用户的需要和财政预算提供以下三种不同的配置完全自适应交通控制固定配时控制拨入式控制scats是一个具有广泛适应性的系统世界各地的工程师根据道路应用环境的不同对其做不同的配置以满足本地的需求
SCATS 交通信号控制系统
SCATS 系统介绍
目录
SCATS 系统介绍................................................................................................... 14
SCATS 系统由于在世界范围的成功安装而取得了国际声誉,安装的国家(城市)有:新加坡、马 来西亚吉隆坡、香港、上海、沈阳、广州、天津、杭州、苏州、宜昌、石家庄、爱尔兰都柏林等。
2 SCATS 控制策略
自问世以来,SCATS 应用最新的科技发展,不断地改进和加强其功能。最新一代的 SCATS6 版本,更是体现了以用户的需求为导向的开发宗旨,为交通管理者的使用和决策提供更多和更灵活 的手段。更重要的是,新技术的使用,使系统造价不断地降低。
4 SCATS 系统操作与管理 ................................................................................. 19
交通控制SCOOT系统与SCATS系统的比较

随着时间的推移由于车流量的变化,这些事先定制的方案需要定期进行更新,否则控制效果会大打折扣
SCOOT控制模型实时跟随车流变化,不需要定期更新,事实上只要相应的检测器保持完好,系统良好的控制效果可以一直保持,而并不需要过多的人工干预
交通检测
SCATS检测器安装在停车线附近,难以监测车队的行进,因而绿信比的优选可靠性较差
参数优化
周期、绿信比和相位差的优化是预先确定的多个方案中,根据实测的饱和度值进行选择;
SCOOT根据模型实时计算,内部并不需要存储事先定义的方案
系统调试
这些事先确定的控制方案在系统安装调试过程中需要耗费大量的时间和精力,而且对工程师的经验要求较高,否则无法达到较好的效果
SCOOT内部不存储方案,不需要进行相应的过程
SCOOT采用上游检测器,而且针对相同方向的车流可以采用跨度较大的线圈,节省实施成本
交通数据
通过检测器可以处理得到的交通数据比较有限
SCOOT数据经过处理可以得到超过十种交通数据
系统人机界面
采用较为传统的操作界面,大多数为英文界面,且未采用标准GIS矢量地图,人机友好性有待提高GIS矢量地图,人机交互友好,操作方便,易于维护
系统实施效果
从控制效果来看,SCATS对旅行时间改善效果有限,对停车次数的减少大概是9%左右
由各大权威测评机构测评的结果显示,SCOOT对于道路旅行时间,停车次数,排队长度等交通运行关键参数的改善均较明显,大致在15-25%之间,尤其对拥堵严重的城市中心其改善效果更为明显
SCOOT检测器布置在平均排队长度,可以更准确的检测交通需求,且可以实时根据需求计算调整交通配时
绿信比优化
SCATS对绿信比的优化最多能做到每个周期优化一次,而且所能优化的幅度是事先确定好的,即从备选的若干方案中选择一次;
SCATS系统

Scats目录1.系统简介2.系统基本功能3.系统控制结构4.SCATS系统特点5.配时参数优化方法6.绿信比方案的选择7.相位差的选择8.SCATS系统优点9.SCATS系统缺点10.对于城市交通管理的作用11.在世界城市交通管理中的应用1.系统简介悉尼自适应交通控制系统(Sydney Coordinated Adaptive Traffic System,简称SCATS,或简称SCATS系统),由澳大利亚新南威尔士州道路交通局(RTA)研究开发,是目前世界上少有的几个先进的城市信号交通控制系统之一。
SCATS系统在某些方面优于英国SCOOT系统,而且以其较低的投入受到各国特别是发展中国家的欢迎。
计算机交通控制系统及近几年发展起来的智能交通系统,通过运用计算机及通讯等高科技来解决交通组织及交通信息管理的问题。
它可以实现对交通的复杂控制,满足人们对交通的各种控制方案的要求,是现代交通管理中不可缺少的重要手段。
SCATS系统所提供的功能,基本上体现了当前交通控制系统研究开发的技术成果。
2.系统基本功能SCATS系统的功能主要有以下几个方面: 1) 交通信息(数据)的实时采集和统计分析。
2) 实现对交通流的自适应最佳控制。
根据不变化的交通状况实时提出最佳的控制方案,保证交通的畅通、快速和安全。
3) 提供“绿波带”及紧急车辆优先通行权。
4) 提供公交车辆优先通行权。
5) 提供交通信号灯人工操作功能。
6) 提供野外工作终端。
可以将便携式个人计算机连接到任何一个路口交通信号机,从而进入整个SCATS系统。
7) 进行系统技1术监察、故障诊断和记录。
8) 远程维护。
可以电话拨号方式将计算机连入SCATS系统,进行操作维护。
3.系统控制结构SCATS系统的控制结构是三级协调分布式控制结构:即指挥中心为中央控制级、确定协调控制级(多个区域)和路口控制机级。
4.SCATS系统特点SCATS系统的特点是控制容量大、很灵活。
上海的交通信号控制与scats系统

智能化
能够根据实时交通流数据进行自动调整信号 灯配时,实现智能化控制。
灵活性
能够适应不同交通场景和路况,灵活调整信 号灯配时方案。
高效性
能够显著提高道路通行效率,缓解交通拥堵 问题。
SCATS系统在上海的应用情况
应用范围
SCATS系统在上海得到了广泛应用,包括市中心区、郊区和高速公路等区域。
实施效果
上海的交通信号控 制与SCATS系统
目录
• 引言 • 交通信号控制系统 • SCATS系统介绍 • SCATS系统与交通信号控制系统的比
较 • 上海交通信号控制与SCATS系统的未来发展01来自CATALOGUE引言
主题介绍
上海作为中国最大的城市之一,其交 通状况一直备受关注。交通信号控制 是缓解城市交通拥堵、提高道路通行 效率的重要手段之一。
SCATS系统能够实现自动化控制和智能调度,提高交通效率;传统交通信号控制系统智能化程度较低, 主要依靠人工调度和管理。
SCATS系统相对于其他系统的优势
高度自动化
SCATS系统采用计算机技术实现高度 自动化控制,减少了人工干预和误差 。
智能调度
SCATS系统能够根据实时交通情况智 能调整信号灯的配时,提高道路通行 效率。
04
CATALOGUE
SCATS系统与交通信号控制系统的比较
两者之间的相似之处
目的相同
都是为了提高道路交通的效率和安全性,减少交通拥 堵和事故。
信号灯控制
两者都通过信号灯来控制交通流量,包括红绿灯、黄 灯和绿灯。
实时监控
两者都具备实时监控交通流量的能力,能够根据实时 交通情况调整信号灯的配时。
两者之间的差异
THANKS
国内外交通信号控制综述

国内外交通信号控制综述国内外交通信号控制系统综述20世纪70年代,由于社会对环境的重视,加上土地资源的限制、石油等状况,人们开始从增建道路满足需求转向以提高道路效率为主。
为了实现缓解交通拥堵,畅通交通,提高道路的通行效率,交通控制信号系统是必不可少的手段。
因为,城市是否畅通在很大程度上受到这条道路上的每一个交叉口的制约。
当交叉口的流量到达一定数值时候,就必须对该路口采取相应的措施。
而交通信号控制系统可以把冲突的交通流在时间与空间上适当分离,以保证交叉口范围的交通安全和充分发挥现有道路在交叉口的通行能力。
所以交通信号控制系统就是现代城市交通控制和疏导的主要手段。
随着信息技术、人工智能技术、计算机及通信技术的发展,交通信号控制系统也在逐渐完善。
以下就是对国内外交通控制系统的介绍:1、英国TRANSYT交通信号控制系统TRANSYT系统是一种脱机配时优化的定时控制系统,全称是(Traffic Network Study T ool)“交通网络研究工具”,这一方法最初是由英国道路交通研究所的D-I罗伯逊先生于1966年提出的。
经过十几年的实践,罗伯逊领导的研究小组对TRANSYT方法不断改进,到1980年,TRANSYT8公之于世。
TRANSYT 是目前世界各国流传最广、普遍应用的一种协调配时方法。
除TRANSYT之外,还有其他一些广泛应用的版本如TRANSYT7、TRANSYT-GN等,这些都是由TRANSYT的某一版本经过修改而派生出来的。
它用来确定城市交通运行指标最小的信号网络的最佳绿信比和相位差。
各国的工程师、专家们对这系统都有不同研究与发展,其中美国有TRANSYT-7F,法国将TRANSYT改为THESEE和THEBES型。
TRANSYT是最成功的静态系统,己被世界上400多个城市所采用,产生了显著的社会经济效益。
但其缺点也很明显:计算量大,在大城市中这一问题尤为突出;不对周期进行优化,故很难获得整体最优配时方案;它是离线优化,需要大量的路网几何、交通流数据,需要花费大量的人力、物力、财力。
交通控制SCOOT系统与SCATS系统的比较
绿信比优化
SCATS对绿信比的优化最多能做到每个周期优化一次,而且所能优化的幅度是事先确定好的,即从备选的若干方案中选择一次;
SCOOT每个阶段均做优化,而且可以精确到秒级
相位差优化
关于相位差的优化,SCATS系统同样是从事先确定的数值中选择
工程维护
系统结构不开放,需要事先为每个路口定义控制方案,而且需要定期更新,系统维护成本较高
系统采用标准的TCP/IP协议,且不需要事先定义控制方案,系统维护简便
系统研发与维护
SCATS系统在国内没有研发团队与维护队伍,无法对用户的定制化需求及维护要求作出及时响应
SCOOT系统在国内有专门的研发力量与维护团队,可以及时响应用户的定制化需求及维护要求
参数优化
周期、绿信比与相位差的优化是预先确定的多个方案中,根据实测的饱与度值进行选择;
SCOOT根据模型实时计算,内部并不需要存储事先定义的方案
系统调试
这些事先确定的控制方案在系统安装调试过程中需要耗费大量的时间与精力,而且对工程师的经验要求较高,否则无法达到较好的效果
SCOOT内部不存储方案,不需要进行相应的过程
控制效果
随着时间的推移由于车流量的变化,这些事先定制的方案需要定期进行更新,否则控制效果会大打折扣
SCOOT控制模型实时跟随车流变化,不需要定期更新,事实上只要相应的检测器保持完好,系统良好的控制效果可以一直保持,而并不需要过多的人工干预
交通检测
SCATS检测器安装在停车线附近,难以监测车队的行进,因而绿信比的优选可靠性较差
SCOOT系统通过模型计算每个路口针对各个方向的相位差,确保最优结果
交通控制SCOOT系统与SCATS系统的比较讲解学习
交通控制SCOOT系统与SCATS系统的比较交通控制系统模型SCOOT与SCATS系统的比较比较项SCATS系统SCOOT系统控制模型SCATS检测器安装在停车线上,不建立交通模型,因些其控制方案不是基丁交通模型的。
正因为如此,其关丁配时的优化未使用交通模型,本质上是一种实时方案选择系统,因而限制了配时方案的优化过程,灵活度不够;SCOOT系统基于精细的交通模型,对实时测得的交通数据进行分析,利用模型实时计算配时,内部没有固定的配时方案,因而更能够贴近”交通流的变化;参数优化周期、绿信比和相位差的优化是预先确定的多个方案中,根据实测的饱和度值进行选择;SCOOT根据模型实时计算,内部并不需要存储事先定义的方案系统调试这些事先确正的控制方案在系统安装调试过程中需要耗费大量的时间和精力,而且对工程师的经验要求较高,否则无法达到较好的效果SCOOT内部不存储方案,不需要进行相应的过程控制效果随着时间的推移由丁车流重的变化,这些事先定制的方案需要定期进行更新,否则控制效果会大打折扣SCOOT控制模型实时跟随车流变化,不需要定期更新,事实上只要相应的检测器保持完好,系统良好的控制效果可以一直保持,而并不需要过多的人工干圳交通检测SCATS检测器安装在停车线附近,难以监测车队的行进,因曲绿信比的优选可靠性较差SCOOT检测器布置在平■均排队长度,可以更准确的检测交通需求,且可以实时根据需求计算调整交通配时绿信比优化SCATS对绿信比的优化最多能做到每个周期优化一次,而且所能优化的幅度是事先确定好的,即从备选的若T方案中SCOOT每个阶段均做优化,而且可以精确到秒级比较项SCATS系统SCOOT系统选择一次;相位差优化关丁相位差的优化,SCATS 系统同样是从事先确定的数值中选择SCOOT系统通过模型计算每个路口针对各个方向的相位差,确保最优结果应对突发情况由丁米用事先定义好的若T方案,系统对丁突发性的交通流缺之应对措施反之由丁SCOOT模型是实时计算,系统内并没有事先定义的方案,因而针对突发性的交通情况同样能够应对实施成本由丁检测器布设在停车线,若要检测排队长度,则需要另外布设检测器,增加了系统实施成木SCOOT采用上游检测器,而且针对相同方向的车流可以米用跨度较大的线圈,节省实施成本交通数据通过检测器可以处理得到的交通数据比较有限SCOOT数据经过处理可以得到超过十种交通数据系统人机界面采用较为传统的操作界面,大多数为英文界面,且未采用标准GIS欠量地图,人机友好性有待提高已针对国内应用专门开发,全部采用中文界面,基丁标准的GIS欠量地图,人机交互友好,操作力'便,易丁维护工程维护系统结构不开放,需要事先为每个路口定义控制方案,而且需要定期更新,系统维护成本较局系统米用标准的TCP/IP协议,且不需要事先定义控制方案,系统维护简便系统研发和维护SCATS系统在国内没有研发团队和维护队伍,无法对用户的定制化需求及维护要求作出及时响应SCOOT系统在国内有专门的研发力量和维护团队,可以及时响应用户的定制化需求及维护要求系统实施效果从控制效果来看,SCATS对旅行时间改善效果有限,对停车次数的减少大概是9%左右由各大权威测评机构测评的结果显示,SCOOT对丁道路旅行时间,停车次数,排队长度等交通运行关键参数的改善均较明显,大致在15-25%之间,尤其对拥堵严重的城市中心其改比较项SCATS系统SCOOT系统善效果更为明显。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SCATS组成结构——信号机Eclipse
2017/12/24
26
国家精品课程:交通控制与管理
交通信号控制
SCATS组成结构——信号机Eclipse
2017/12/24
27
国家精品课程:交通控制与管理
交通信号控制
SCATS组成结构——通讯 SCATS的通讯
中央管理级、区域管理控制、用户端、与集成平台 等之间的通信是通过TCP/IP协议通讯; 区域控制计算机与路口控制器之间的通讯可以根据 条件通过多种方式实现: 1、FSK调制电话线通讯(沈阳、上海…) 2、点对点光纤RS232通讯(杭州、宁波、广州、合 肥…) 3、TCP/IP网络通讯(重庆、苏州、上海(部分)….) 4、无线(GSM)网络通讯(广州(部分)…) 5、以上多种形式并存
其它 ITS 设备
解调器 & RAS connection
LAN or WAN 遥远终端
SCATS 操作台 (PC’s)
交通信号控制
SCATS系统结构示意图
ITS port SCATS 中央/管理系统
区域信号控制中心
区域信号控制中心
区域信号控制 中心
区域控制中心 新增区控中心 1
路口控制器l 路口控制器n 路口控制器l
2017/12/24
16
国家精品课程:交通控制与管理
ห้องสมุดไป่ตู้
交通信号控制
SCATS组成结构——区域管理控制级
SCATS区域管理控制级:
• • 采用IBM兼容工业型计算机或服务器 要求极低: 最低要求:CPU 1GHZ 内存 256MB 硬盘 20G 每个区域管理控制计算机可以管理控 制250个路口信号控制器
路口控制器m
路口控制器l
路口控制器m
2017/12/24
13
国家精品课程:交通控制与管理
交通信号控制
SCATS系统结构纲要
SCATS中央管理控制级 SCATS区域管理控制级 SCATS系统工作站 SCATS系统的路口控制器-Eclipse SCATS系统的通讯
2017/12/24
A 45%
C 25% B 25%
A 50%
相位(时)差 OFFSETS
sub-systems
相位(时)差
OFFSETS
intersections
2017/12/24
31
国家精品课程:交通控制与管理
交通信号控制
SCATS系统基本原理
• 系统控制原理
线圈车辆检测器 – SCATS的基本原理是采用有效的负反馈。 – 这种设计能非常有效的适应交通路口的变化,能对路口 的情况的变化自身作出调整。 – 无须管理人员经常性对系统干预。 – 因此,非常适合交通发展迅速的中国城市。
14
国家精品课程:交通控制与管理
交通信号控制
SCATS组成结构——中央管理控制级
SCATS中央管理控制级: • • 采用IBM兼容工业型计算机或服务器 要求极低: 最低要求:CPU 350MHZ 内存 256MB 硬盘 20G 每个中央管理级计算机可以管理64个 区域管理控制计算机 中央管理级安装在与系统中任何一个 区域管理控制计算机上
2017/12/24
8
国家精品课程:交通控制与管理
交通信号控制
SCATS在中国的应用
超过100个路口的城市:
上海(包括浦东): 15个区域控制中心,超过2000个路口; 香港:控制超过1400个路口;(香港岛300个路口取代SCOOTS); 沈阳:5个区域控制中心,超过600个路口,ITS接口; 苏州:控制150个路口,视频检测器应用、ATM通讯传输 广州: 8个区域控制中心,控制1000个路口; 石家庄:控制300+个路口,视频检测器应用、 ITS接口 杭州:控制500+个路口; 东莞:控制200+个路口; 宁波:控制200+个路口; 海口:100 +个路口;
通讯
车辆信号灯组 车辆检测器
逻辑模块
检测 输入口
特征数据
8-32个输出
行人按钮 路口控制器
行人信号灯组
2017/12/24
21
国家精品课程:交通控制与管理
交通信号控制
SCATS组成结构——信号机Eclipse
主要特点: • RTA最新TSC4认证的SCATS控制 器 • 最大设计:32灯组输出+48通道检 测器输入+48路干触点输入 • 冲突监视 • 特殊用途输入、输出:12路 • 通讯:FSK、RS232 控制模式: – 手动、定时、感应控制; – 降级无线缆协调; – 黄闪; – 紧急呼叫优先; – 公交优先
2017/12/24
30
国家精品课程:交通控制与管理
交通信号控制
系统主要控制原理
利用收集的交通情况实时全自动地优化以下交通控制参数
周期 Cycle Length
C 30% B 25% A 45%
绿信比 Splits
A 45%
C 30% B 25%
C 30% B 25%
灵活子系统连锁
LINKS
Dynamic Marriage
2017/12/24
4
国家精品课程:交通控制与管理
交通信号控制
SCATS 是先进城市理想的交通管理系统 (智能运输系统主干部分)
事件检测 与处理
互联网信息
可变标志
2017/12/24
电子可变 车道系统
收音机/电台 提供现时交通信息
5
可变 时速标志
国家精品课程:交通控制与管理
交通信号控制
SCATS是什么?
其他业绩: 天津: 80+个路口; 余姚:50+个路口; 合肥: 40+个路口; 宜昌:60 +个路口; 温州:20+个路口; 重庆:30+个路口;
2017/12/24 9 国家精品课程:交通控制与管理
交通信号控制
SCATS在中国的应用
综上: SCATS在中国拥有16个城市,控制超过 6500个路口,这是在国内应用的其他系统 不可比拟的。 每个城市应用后,系统都得到快速的扩 展。
2017/12/24
7
国家精品课程:交通控制与管理
交通信号控制
澳大利亚的智能运输系统的地位 得到国际性确认
美国的第一个智能运输系统示范工程 1st ITS Demonstration Project in USA
– FAST-TRAC Project (1992) in Oakland County,Michigan (奥克兰,密歇根州) • 采用澳大利亚的 SCATS 自适应交通控制系统作为它的 主干-先进交通管理系统 (ATMS). • 使用视频检测器技术 – 取得辉煌成绩, 增强美国对智能运输系统的兴趣, 确保ITS技术继续开发与应用。
2017/12/24 28 国家精品课程:交通控制与管理
交通信号控制
控制基本原理
SCATS系统
2017/12/24
29
国家精品课程:交通控制与管理
交通信号控制
系统控制的核心理念
通过系统的合理配时“均衡”路网交通流量,达 到对车辆、路网的“平衡”控制,提高整体效率! 在系统控制时综合考虑路网交通,如“绿波”设 置也是有条件的,如考虑到绿波的下游是否有“消 化”能力。 饱和流量时的协调控制更偏重疏导路口排队堵塞 等。
区域交通信号控制—— 上海的SCATS系统
上海市交警总队高工:韩如文老师
2017/12/24
1
国家精品课程:交通控制与管理
交通信号控制
Contents
SCATS系统的简介 SCATS系统的结构
SCATS系统的基本控制原理
SCATS系统的控制基本参数 SCATS系统的功能 SCATS系统在上海的扩展应用
SCATS组成结构——SCATS工作站
SCATS工作站:
• •
采用IBM兼容计算机 要求极低: 最低要求:CPU 1GHZ 内存 256MB 硬盘 20G • 每个SCATS系统连接的管理控制工作站的数量 没有限制,用户200个,同时允许30个工作站对系 统操作
2017/12/24
19
国家精品课程:交通控制与管理
当区域计算机在线运行时,可以通过终端操作指令和自动时间 表,显示和或改变所有实时控制数据。 在改变参数和调整任何数列维度数据时,无需切断区域计算机 的在线运行。 可以从任何终端人工干预路口的运行。 管理该区域控制器下的路口控制器。
2017/12/24
18
国家精品课程:交通控制与管理
交通信号控制
交通信号控制
SCATS组成结构——路口控制器 SCATS路口控制器(ECLIPSE) • RTA授权认证产品 • 针对路口特征的软件定义 • 多相位控制 • 特殊控制 • 高可靠性 • 高可维护性
2017/12/24
20
国家精品课程:交通控制与管理
交通信号控制
SCATS组成结构——路口控制器
SCATS 区域控制器
•
•
2017/12/24
15
国家精品课程:交通控制与管理
交通信号控制
中央控制器的作用
SCATS是以模块化结构设计的,可以应用于小、中、 大规模的城市。
通常在多个区域计算机组成的系统中,需要一个管理计 算机,负责数据的输入、采集、监测、数据分析、系统 记录与备份等管理性工作,以简化大系统的运营管理。 SCATS可以将网络中的任何一台区域计算机定义为管 理计算机,从而无需单独设置独立的管理计算机。
国家精品课程:交通控制与管理
•
控制模块机箱
– – – –
2017/12/24
23
交通信号控制
SCATS组成结构——信号机Eclipse