新能源汽车创新的电差速器及驱动桥
2024年新能源商用车驱动方案及电驱动桥的应用

2024年新能源商用车驱动方案及电驱动桥的应用随着全球对环境保护的要求越来越高,新能源商用车的发展变得越来越重要。
2024年,我们预计新能源商用车的驱动方案将会继续向电动化方向发展,并采用电驱动桥技术来提升车辆的性能和效率。
首先,电动化将成为主流。
目前,纯电动、插电式混合动力和燃料电池三种电动驱动方式已经成为商用车领域的主要选择。
相比传统的燃油车辆,电动商用车具有零排放、低噪音和高效能的优势。
2024年,我们预计纯电动车辆将占据新能源商用车市场的主导地位,插电式混合动力和燃料电池车辆将逐渐增加。
其次,电驱动桥技术将被广泛应用。
电驱动桥是指将电动机与行车桥集成在一起,通过电动机直接驱动车轮的技术。
相比于传统的传动轴驱动方式,电驱动桥能够减少部件数量和传动损耗,提高车辆的能效和性能。
2024年,电驱动桥技术将在新能源商用车中得到广泛应用,尤其是重型商用车领域。
此外,蓄电池技术的进步将推动电动商用车的发展。
蓄电池是电动车辆的重要组成部分,其性能直接影响着车辆的续航里程和充电速度。
2024年,我们预计蓄电池技术将继续进步,实现更高的能量密度和更快的充电速度,从而提升新能源商用车的续航里程和使用便利性。
最后,智能化技术将成为新能源商用车的重要特征。
随着人工智能和互联网技术的快速发展,智能化技术在商用车领域的应用也越来越广泛。
智能化技术不仅可以提升车辆的驾驶安全性和舒适性,还可以实现车辆的自动驾驶和远程监控等功能。
2024年,我们预计智能化技术将在新能源商用车中得到广泛应用,为用户提供更加便捷和智能的出行体验。
总之,2024年新能源商用车将以电动化为主导趋势,并广泛采用电驱动桥技术来提升性能和效率。
蓄电池技术的进步和智能化技术的应用将进一步推动新能源商用车的发展。
相信在不久的将来,新能源商用车将成为商业运输领域的主流选择,为我们的交通出行带来更加环保和可持续的未来。
电驱动桥技术及技术路线

电驱动桥开发主要内容简介电驱动桥技术背景电驱动桥技术路线目录电驱动桥解决方案总结•欧洲《欧盟2020年战略创新计划》•2030年机动车零排放登记,英国法国2040年禁售汽柴油车,美国《新能源汽车战略规划蓝国际形势德国年机动车零排放登记英国法国年禁售汽柴油车美国《新能源汽车战略规划蓝图》、零排放、碳配额,日本《日本汽车战略2014》•·····•国家“863”、“973”计划及“十一五”“十二五”规划等重大科技项目列为重点领域并给与经费支持。
•中国《中国制造2025》、“节能与新能源汽车技术路线图“,规划产销2020年210万辆,2025年万辆万辆国内形势525万辆,2030年1520万辆。
•“汽车产业中长期发展规划”,明确新能源汽车销量2020年200万辆,2025年700万辆。
•碳排放积分交易政策实施、双积分政策实施财政补贴•国家四部委下发新能源汽车推广补贴方案,明确中央对各类新能源汽车提供财政补贴,加快推动新能源汽车产业化进程。
企业战略•电驱动桥作为未来电新能源动力总成的发展方向,是各大企业重点争夺的制高点。
驱动电机系统生产传动产业链企业驱动电机相关研发控制器生产制造能电驱桥相关研发能力电驱桥生产制造能力电驱桥市场能力驱动电机设计力驱动电机自动化生电驱桥市场新能源乘用车市场驱动电机及控制器集成能力变速箱生产企业新能源乘用车驱动电机控制器设计及系统集成产线电机控制器装配线新能源公交市场VCU 技术车桥生产企业新能源物流车驱动电机系统测试台架电机控制器检测设备新能源轻型载货市场整车标定能力铸锻企业新能源客车新能源重型载货市场新能源汽车及零部件各类测试台架设备齿轮加工企业新能源专用车新能源特种车方案切实可行●电驱桥项目应结合实际技术水平和工艺实力,兼顾乘用车和商用车用电驱动桥的需求及各类别新能源车辆电驱桥的通用性方案原则明确目源车辆电驱桥的通用性。
新能源商用汽车电驱动桥技术路线

1 2 3 4 5 6 7 89 101、车桥概述发动机、变速箱和车桥是卡车的三大动力核心总成,三者中车桥虽不像发动机和变速箱一样常被人们提及,但却在汽车动力传输的过程中发挥着纽带的作用,对整车的行驶的动力性和稳定性有着举足轻重的作用。
重卡车桥作为重卡4大总成(驾驶室、发动机、变速器、车桥)之一,其行业和技术发展水平在一定程度上关乎着重卡行业的发展。
2、车桥的基本功能车桥的功能就是传递车架(或承载式车身)与车轮之间各方向作用力及其力矩,其对汽车的动力性,稳定性,承载能力等性能有着重要的影响。
A、将万向传动装置传来的发动机转矩通过主减速胎、差速器、半轴等传到驱动车轮,实现降低转速、增大转矩;B、通过主减速器圆锥齿轮副改变转矩的传递方向;C、通过差速器实现两侧车轮差速作用,保证内、外侧车轮以不同转速转向。
D、通过主减速器齿轮的传动,降低转速,增大转矩;E、通过桥壳和车轮,实现承载及传力作用。
3、车桥分类中央单级减速驱动桥是驱动桥结构中最为简单的一种,是驱动桥的基本形式,在载重汽车中占主导地位。
一般在主传动比小于6的情况下,应尽量采用中央单级减速驱动桥。
目前的中央单级减速器趋于采用双曲线螺旋伞齿轮,主动小齿轮采用骑马式支承,有差速锁装置供选用。
▲奔驰单级减速桥▲奔驰单级减速桥中央双级驱动桥中央双级驱动桥主要有2种类型:一类如伊顿系列产品,事先就在单级减速器中预留好空间,当要求增大牵引力与速比时,可装入圆柱行星齿轮减速机构,将原中央单级改成中央双级驱动桥,这种改制”三化”程度高,桥壳、主减速器等均可使用。
盆齿轮直径不变。
▲伊顿中央双级减速桥实物▲伊顿中央双级减速桥实物▲伊顿中央双级减速器宣传图册▲伊顿中央双级减速器爆炸图另一类如洛克威尔系列产品,当要增大牵引力与速比时,需要改制第一级伞齿轮后,再装入第二级圆柱直齿轮或斜齿轮,变成要求的中央双级驱动桥,这时桥壳可通用,主减速器不通用,盆齿轮有2个规格。
由于上述中央双级减速桥均是在中央单级桥的速比超出一定数值或牵引总质量较大时,作为系列产品而派生出来的一种型号,它们很难变型为前驱动桥,使用受到一定限制;因此,综合来说,双级减速桥一般均不作为一种基本型驱动桥来发展,而是作为某一特殊考虑而派生出来的驱动桥存在。
浅谈电驱动桥关键技术分析
浅谈电驱动桥关键技术分析摘要:电动驱桥是一种通过电力驱动车辆运行的技术,包括电机、减速器、差速器和控制系统等多个部件。
其主要原理是将电能转换为机械能,从而驱动车轮旋转产生动力,实现车辆的运行。
具体来说,电动驱桥解决了传统车辆对内燃机依赖的问题,使得车辆更加节能环保,并且可以提供更加平稳、高效的驾驶体验。
这些技术不仅可以提高电动驱桥的效率,还可以优化整个车辆的使用性能,更好地满足现代人对于汽车的需求。
关键词:电驱动桥;关键技术随着全球节能环保意识的不断提高,电动汽车逐渐成为未来汽车市场的重要发展方向。
而电动汽车的核心技术之一就是电动驱桥技术,它对汽车的性能、效率和稳定性产生着至关重要的影响。
传统的汽车使用内燃机作为驱动力源,这种驱动方式不仅造成了严重的环境污染,而且也存在着能源浪费的问题。
相比之下,电动驱桥技术无污染、高效节能,可以有效地解决上述问题。
此外,电动驱桥技术还具有响应快、加速平稳和大幅降低噪声等优势,受到越来越多消费者的青睐。
一、电驱动桥技术优点分析随着科技的不断发展和创新,电动驱桥技术不断地提高,其在车辆性能、经济性和噪音方面都取得了显著的进展。
与此同时,由于电动驱桥技术的重要性,各汽车制造商都在不断投入研发资金,使得电动驱桥技术不断创新、完善和普及化[1]。
1.电动驱桥技术采用电能作为驱动力源,其车辆的尾气排放为零,对环境污染极小。
这对于改善城市空气质量、减少温室气体等方面都具有重要意义。
2.相较于传统的内燃机发动机,电动驱桥技术在能量转化和利用效率上更高,能够大幅降低能源浪费,从而达到节能环保的目的[3]。
3.由于电动驱动系统具有高扭矩输出、零时滞等特性,在加速过程中响应速度快,加速平稳,驾驶起来感受舒适。
尤其是在城市道路的行车场景中,具有非常好的优势。
二、电驱动桥关键技术电驱动桥是一种采用电机作为动力源的汽车传动装置,它主要由电机、减速器、差速器和轮边减震器等部件组成。
与传统的机械传动桥相比,电驱动桥具有响应速度快、运行效率高、能耗低、维护成本低等优点,因此被越来越多的汽车制造商所采用。
纯电动汽车驱动桥模态分析
纯电动汽车驱动桥模态分析张爽;陈长征【摘要】针对纯电动汽车驱动桥进行振动噪声研究.通过三维软件建立驱动桥的三维模型,对三维模型进行有限元模态分析,获取驱动桥前6阶固有模态参数.再对纯电动汽车实体驱动桥进行试验模态分析,将两种方法获得的模态参数进行比对,验证了有限元模态分析方法的正确性,再将获得的模态参数与外界激励耦合情况进行研究,为模态分析技术在纯电动汽车领域的应用提供参考.【期刊名称】《机械工程师》【年(卷),期】2018(000)011【总页数】3页(P27-29)【关键词】振动噪声;纯电动汽车驱动桥;有限元模态分析;试验模态分析【作者】张爽;陈长征【作者单位】沈阳工业大学机械工程学院,沈阳 110780;沈阳工业大学机械工程学院,沈阳 110780【正文语种】中文【中图分类】U463.2180 引言随着全球汽车的不断递增,能源短缺和环境污染成为不可忽视的问题,纯电动汽车(Pure Electric Vehicle,PEV)通过电池带动电动机实现汽车的驱动,保证了噪声低,功率高,与传统的内燃机汽车相比较,在环境保护方面优势巨大 [1]。
纯电动汽车在各国大力发展和大面积应用,对实现节约能源,保护环境起到了重要作用[2]。
电动汽车的噪声振动舒适度等因素对电动汽车的整体评价影响极大。
电动汽车承受来自地面传到驱动桥的振动,因此纯电动汽车电驱动桥的固有振动频率和振型是研究汽车振动以及舒适度的重要因素,模态分析技术是研究结构体固有特性的一种方法,对分析纯电动汽车驱动桥的固有频率和振型是必不可少的[3]。
本文利用SolidWorks对纯电动汽车驱动桥进行三维建模,通过ANSYS Workbench中的模态分析模块对驱动桥模型进行分析,提取它的前6阶固有频率和振型,然后再利用试验模态分析方法对纯电动汽车驱动桥实体进行分析,比较两种方法获得模态参数的同异,肯定了有限元方法获得参数的正确性;再将获得的模态参数与外界激励耦合情况进行研究,为进一步研究纯电动汽车驱动桥的动态特性打下基础。
新能源汽车——电动汽车动力及控制技术设计_毕业设计论文
济南职业学院毕业设计(论文)题目:新能源汽车电动汽车动力及控制技术设计系部:机械系济南职业学院毕业论文(设计)任务书课题名称:电动汽车动力及控制技术设计系部:_机械系专业:汽车检测与维修__________ 姓名:_ 学号:指导教师:_ 二〇一一年4月25 日毕业设计(论文)成绩评定表系部:机械系专业:汽车检测与维修班级:1班注:设计(论文)总成绩=指导教师评定成绩(30%)+评阅人评定成绩(30%)+答辩成绩(40%)新能源汽车电动汽车动力及控制技术设计摘要随着世界环境的污染、全球石油危机日益严重而带动的石油价格不断上涨给汽车工业带来了不可忽视的冲击,也增强了人们开发新能源的意识,而新能源汽车更是人们关注的一大焦点。
目前电瓶式纯电动汽车以噪音小、耗能低、无污染、成本低、结构简单而成为新能源汽车发展的主流,世界很多国家都投入了大量的人力、财力去开发电动汽车。
本文主要围绕电动汽车的电动机以及目前普遍使用的电动车控制系统主要参数作出分析,例如转速与转矩的关系、转速与功率的关系、功率与转矩的关系以及传动比、蓄电池的比能量等,设计出合理的电动车动力系统和控制系统。
本文主要采用的技术有:1、电动机的转矩、转速、功率。
2、电动机的主要调速方式。
关键词:电动机、发动机、转矩、变频调速、交流电动机、EV目录第一章前言 (1)第二章电动汽车构造与原理 (2)第一节电动车的种类 (2)第二节蓄电池电动车 (4)第三节燃料电池电动车 (10)第三章电动车动力及控制设计 (12)第一节电动车驱动电机种类 (12)第二节直流驱动电动机 (14)第三节交流驱动电动机 (18)第四节直流电动机的控制 (21)第五节三项交流电动机的控制 (24)第四章我国电动汽车的缺陷 (27)第五章电动汽车的发展趋势 (29)致谢 (31)附录一 (32)附录二 (33)参考文献 (39)第一章前言汽车工业的告诉发展,汽车带来的环境污染、能源短缺、资源枯竭和安全等方面的问题越来越突出。
电驱动桥关键技术综述

2021年第6期【摘要】对电动汽车电驱动桥的研究现状及关键技术进行了综述。
首先介绍了电驱动桥的分类及各自特点,然后分别从构型、结构、换挡控制方面凝练了电驱动桥急需攻关的共性关键技术,对比分析了不同多挡化构型的组成特点、轻量化集成化结构设计方法、智能换挡控制技术,最后总结得出多挡化、轻量化、集成化以及多目标控制是电驱动桥未来的发展趋势。
主题词:电动汽车电驱动桥轻量化多挡化智能化集成化中图分类号:U469.7文献标识码:A DOI:10.19620/ki.1000-3703.20200996Review on Key Technologies of Electric Drive AxlesWang Jianhua,Huang Jianfei,Jin Di(Jilin University,Changchun 130022)【Abstract 】The paper reviews the research status and key technologies of electric drive axles for electric vehicles.Firstly,it introduces the classification and characteristics of electric drive axles,then summarizes the key technologies of electric drive axles that need to be tackled in configuration,structure and gearshift control,the paper further compares and analyzes composition characteristics,lightweight integration structure design method and intelligent gearshift control technology of different multi-speed axle configurations.The paper finally points out that multi-speed,lightweight,integration and multi-target control are the future development trends of electric drive axles.Key words:Electric vehicle,Electric drive axle,Lightweight,Multi-speed,Intelligentization,Integration王建华黄剑飞靳迪(吉林大学,长春130022)电驱动桥关键技术综述*汽车技术·Automobile Technology1前言电驱动桥是针对电动汽车设计的一种机电一体化驱动系统,具有集成化程度高、体积小、能耗低等优点[1]。
两档电驱动桥,专为SUV电动化而来
两档电驱动桥,专为SUV电动化而来龚淑娟【摘要】舍弗勒公司的最新两档电驱动桥可以说是专为中国SUV量身定制的产品。
与传统的一档电驱桥相比,两档电驱桥在一档大速比的工况下可输出更大转矩,在二档时不仅提高了最高车速,还可以使电动机始终工作在高效区域内。
【期刊名称】《汽车制造业》【年(卷),期】2018(000)020【总页数】2页(P28-29)【关键词】驱动桥;SUV;电动化;量身定制;最高车速;大转矩;大速比;高效区【作者】龚淑娟【作者单位】[1]不详;【正文语种】中文【中图分类】U463.218图1 舍弗勒的两档平行轴式电驱动桥面对日益严苛的汽车油耗目标及排放法规要求,越来越多的汽车生产商开始考虑采用驱动电动机替代传统发动机,并与减速器和差速器一起,组成电驱动桥系统,实现驱动系统的电动化。
电驱动桥系统可以直接取代发动机和变速器,灵活安装在前轴或后轴,实现前轮或后轮纯电驱动。
通过这种方式,传统燃油车很容易实现电动化。
它也可以仅安装在后轴,匹配前轴的动力总成系统,实现四驱功能。
此时,传统四驱系统的重要部件,如分动器、传动轴、后桥差速器以及液压附件等,均可被装在后轴上的电驱动桥取代,这样既节约了传动线路中的大量空间,便于集成高压电池,同时也减少了使用电驱动桥的额外成本。
中国首款量产的电驱动桥,是舍弗勒的两档平行轴式电驱动桥,如图1所示,已成功搭载于插电混动SUV长城WEY P8和长安CS75插电式混动SUV。
这种驱动概念具有同轴式和平行轴式两种布置形式可供选择,其整车应用平台覆盖范围极广,从对功率密度有极高要求的运动跑车,到对半轴传动角度有极高要求的SUV,从弱混、强混、插电混动到纯电动系统。
目前,前后轴均搭载舍弗勒单档电驱动桥的高性能电动四驱车,奥迪etron 即将在今年年底发布。
对于纯电动汽车,这款电驱动桥有单档方案和具备动力换档功能的两档方案。
极为紧凑的结构设计舍弗勒两档平行轴式电驱动桥采用了模块化的设计原则,主要由水冷永磁同步电动机、减速齿轮组、差速器和换档执行机构组成。
新能源轻型商用车电驱桥的研究与开发

新能源轻型商用车电驱桥的研究与开发新能源轻型商用车电驱桥分类介绍江铃底盘电驱桥产品介绍电驱桥关键技术分享交流下一步平台化计划电驱桥发展趋势介绍目录CONTENTS轻型商用车: 微面、微卡、小卡、轻客、海狮、皮卡、轻卡等新能源微面新能源海狮新能源皮卡新能源轻客新能源微卡/小卡新能源轻客新能源轻卡直驱式电驱桥平行轴式电驱桥 轻型商用车: 微面、微卡、小卡、轻客、海狮、皮卡、轻卡等多合一电驱动系统电 驱 桥 分 类方 案 介 绍方 案 特 点直驱式电驱桥保留传动轴及传统后桥1.不利于电池包的布置;2.传动效率低;3.属于油改电产品;4.过渡产品逐步被市场淘汰平行轴式电驱桥电驱动后桥集成驱动电机及电机控制器,驱动电机直接驱动电驱动桥总成1.传动效率高;2.便于电池包的布置;3.全新平台整车需求产品(CTC滑板底盘等);4.市场占有率正在不断增加;5.偏动力性整车需求产品多合一电驱动系统集成驱动电机、电机控制器、减速器、DCDC、OBC、PDU、BCU等1.传动效率高;2.便于电池包的布置;3.全新平台整车需求产品(CTC滑板底盘等)4.乘用类皮卡、轻客及乘用车的主打产品;5.偏舒适性整车需求产品电 驱 桥 类 型方 案 照 片参 数适 用 车 型方 案 特 点微面车型电驱桥1、满载车重2.5t2、满载后轴荷1.5t3、减速器速比7.5/8.54、电机额定功率/额定扭矩/额定转速:30Kw/100Nm/3200rpm5、电机峰值功率//峰值扭矩/转速:60Kw/200Nm/9000rpm1、主减速器壳体采用铝合金材料,具备良好的散热性、提高了轴承和油封的使用寿命,相对铸铁材料可减重约8kg,降低簧下质量。
2、优异的NVH性能,全转速范围内噪音低至70db,良好的驾驶感受及舒适性。
海狮车型电驱桥1、满载车重3.25t2、满载后轴荷1.8-2.1t3、减速器速比8.07/9.334、电机额定功率/额定扭矩/额定转速:40Kw/150Nm/2700rpm5、电机峰值功率//峰值扭矩/转速:80Kw/350Nm/7500rpm1、采用正反向等寿命设计,可适应电机前后左右任意方向的布置。
纯电动汽车两档式驱动桥设计
纯电动汽车两档式驱动桥设计纯电动汽车的发展日益受到关注,设计一种高效的驱动系统对于提升电动车辆的性能和续航能力具有重要意义。
在驱动系统中,驱动桥起着连接电动机和车轮的作用,其设计对于车辆的驱动性和稳定性有关键影响。
目前市场上的纯电动汽车往往采用单一的驱动桥设计,即电动机直接驱动车轮。
然而,单一驱动桥存在一些不足,如低速启动时的效率低、高速巡航时电动机转速过高等问题。
因此,设计一种能够在不同工况下自动切换驱动档位的两档式驱动桥具有重要意义。
两档式驱动桥设计可以根据驾驶工况自动切换驱动档位,从而实现在低速启动时提供足够的扭矩和加速性能,并在高速巡航时降低电动机的转速,提高能效。
这不仅可以提升电动汽车的驾驶性能和舒适性,还能延长驱动系统的使用寿命。
综上所述,纯电动汽车两档式驱动桥设计在提高电动车辆性能和续航能力方面具有重要的研究意义。
解释纯电动汽车两档式驱动桥的工作原理和基本构成纯电动汽车的两档式驱动桥是一种特殊的传动系统,它的设计旨在提供两种不同的传动比例,以满足不同行驶模式的需求。
该驱动桥的基本构成包括电动机、减速器、差速器和两个半轴。
在驱动过程中,电动机提供动力,通过减速器将电动机的高速转速降低到合适的输出转速。
差速器将输出转速分配给两个半轴,并根据需要提供不同的传动比例。
两档式驱动桥的工作原理是通过改变两个半轴的转速比例来实现不同的传动比例。
在普通模式下,两个半轴的转速比例相同,实现了正常的行驶状态。
而在运动模式下,驱动桥会调整半轴的转速比例,使一根半轴的转速更高,从而提供更高的加速性能。
这种设计的优点是可以在不同行驶模式下平衡动力和节能要求。
通过调整传动比例,可以在普通行驶和运动行驶之间找到最佳平衡点,既满足了正常行驶的需求,又提供了更激烈的加速性能。
总之,纯电动汽车的两档式驱动桥在提供多种行驶模式选择的同时,也平衡了动力和节能要求。
它的工作原理简单有效,可以为不同驾驶需求提供合适的驱动性能。
2024年新能源商用车驱动方案及电驱动桥的应用

2024年新能源商用车驱动方案及电驱动桥的应用____年新能源商用车驱动方案及电驱动桥的应用随着环境保护和能源问题的日益突出,新能源商用车已成为未来发展的重要方向。
____年,预计新能源商用车市场将进一步扩大,电驱动技术将成为主流。
在驱动方案中,电驱动桥将得到广泛应用,实现更高效、更环保的商用车运输。
一、电驱动桥的基本原理电驱动桥是指通过电动机驱动车辆的轴传动系统。
它将发动机和传统的机械传动装置替换为电动机和电子控制装置,实现对车辆的动力输出和控制。
电驱动桥主要由电动机、功率电子装置、传动装置和控制系统等组成。
二、电驱动桥的优势1. 提高动力输出效率:相对于传统的内燃机驱动系统,电驱动桥可以更高效地将电能转化为动力输出,减少能源的浪费。
2. 减少污染排放:电驱动桥不需要燃油燃烧,因此可以减少污染物的排放,降低对环境的影响。
3. 提高驾驶体验:电驱动桥的动力输出响应更迅速,提供更平稳的加速和减速过程,使驾驶更舒适和安全。
4. 降低运行成本:电驱动桥的维护成本相对较低,同时采用电力作为能源也可以降低运行成本,提高商用车的经济性。
三、电驱动助力方案在____年,预计电驱动助力方案将得到进一步应用和发展。
电驱动助力可分为两种方式:双电驱和单电驱。
1. 双电驱方案:双电驱方案采用两个电动机分别驱动车辆的前后轴,实现全部轮驱动。
这种方案可以提供更高的牵引力和操控性能,适用于一些需要更大动力输出的商用车型,如重型货车和公交车。
2. 单电驱方案:单电驱方案采用一个电动机驱动车辆的一个轴,另一个轴则由传统的机械传动装置驱动。
这种方案适用于轻型商用车和小型货车等,能满足一般运输需求。
四、电驱动桥的应用场景1. 城市物流配送:随着城市物流配送量的不断增加,电驱动桥可以提供更高的效能和更低的能耗,满足城市物流的运输需求。
2. 公共交通:电驱动桥的应用对公共交通领域来说具有重要意义。
电驱动桥可以提供更平稳、更安静的乘坐体验,并减少对城市空气的污染。
毕业设计--纯电动汽车驱动桥设计
目录第一章绪论1.1纯电动汽车概述1.1.1 电动汽车的分类1.2驱动桥的概述1.2.1驱动桥的功能1.2.2驱动桥的分类1.2.3驱动桥的组成1.2.4驱动桥的设计1.3电动车出现的背景、意义及国内外纯电动车驱动桥发展现状第二章传动系统工作原理2.1 轿车采用的传动方案2.2 主减速器的确定2.2.1 电动轿车动力性能要求2.2.2 电机参数和减速器传动比的选择2.2.3 匹配结果2.3 主减速器的结构形式2.3.1 主减速器结构方案分析2.3.2 圆柱齿轮传动的主要参数2.3.3 锥齿轮传动的主要参数2.4 差速器的确定2.4.1 差速器的工能原理2.4.2 差速器的选择2.4.3 差速器主要参数的计算2.5 相关轴及轴承设计2.5.1减速器输入轴2.5.2齿轮中间传动轴2.5.3相关轴承的选择2.5.4键的选择和校核2.5.5轴承的强度校核第三章毕业设计总结与感想第1章绪论1.1纯电动汽车概述1.1.1电动汽车的分类电动汽车在广义上可分为3 类,即纯电动汽车(BEV) 、混合动力电动汽车(HEV) 和燃料电池电动汽车(FCEV)。
纯电动汽车是完全由二次电池(如铅酸电池、镍镉电池、镍氢电池或锂离子电池)提供动力的汽车。
目前,这三种汽车都处于不同的研究阶段。
由于一次石化能源的日趋缺乏,纯电动汽车被认为是汽车工业的未来。
但是车用电池的许多关键技术还在突破,因此,纯电动汽车多用于低速短距离的运输。
混合动力车的开发是从燃油汽车到未来纯电动汽车的一种过渡阶段,它既能够满足用户的需求,有具有低油耗、低排放的特点,在目前的技术水平下是最切合市场的,但是混合动力车有两个动力源,在造价和如何匹配控制上还需要继续努力。
燃料电池电动汽车才有燃料电池作为能源。
燃料电池就是利用氢气和氧气(或空气)在催化剂的作用下直接经电化学反应产生电能的装置,具有无污染,只有水作为排放物的优点。
但现阶段,燃料电池的许多关键技术还处于研发试验阶段。
新能源汽车电驱系统差速器常见问题解析
新能源汽车电驱系统差速器常见问题解析1 2 3 4 5 6差速器作为新能源电驱系统必不可少的一部分,为保证正常的车辆转弯,设计之初需对差速器的使用工况进行分析,避免出现壳体和垫片异常磨损、行星轴与行星轮异常磨损、烧死、行星轴断裂等现象、齿轮打齿、齿根断裂及行星轴断裂等严重失效问题,较高的差速器故障率会带来巨大的经济损失,也给顾客带来了返修成本的增加。
如下图。
1.介绍差速器旋转慢的左侧半轴齿轮受到的转矩M2大,旋转快的右侧半轴齿轮受到的转矩M1小,左、右两侧转矩的和等于差速器受到的转矩M0,两侧转矩的差等于差速器的内摩擦转矩Mr 。
高速侧扭矩:M1=(M0-Mr )/2低速侧扭矩:M2=(M0+Mr )/2驱动桥差速器在重载工况下经常出现壳体和垫片异常磨损、行星轴与行星轮异常磨损、烧死、行星轴断裂等现象、齿轮打齿、齿根断裂及行星轴断裂等严重失效问题。
1.一方面由于垫片处的磨损量影响齿轮啮合位置从而影响齿轮强度;2.另一方面过多铁屑破坏了润滑油膜,严重时会造成齿轮与行星轴烧死进而导致行星轴断裂;3.润滑不畅导致差壳内腔热量及杂质排不出去,使零件间的磨损加剧,使行星轮发生异常磨损、点蚀打齿;4.润滑不好,在重载荷下行星轮与行星轴烧结,行星轴随行星轮转动导致行星轴受力方式发生改变,致使行星轴发生断裂。
1. 高速侧半轴齿轮2. 低速侧半轴齿轮 3. 齿轮轴 4.行星齿轮磨损机理简析*黏着磨损机理零件间相对滑动时,在破裂处形成焊点,继续运动,这些焊点又会分离。
零件间的分离如果在界面以下发生,使得金属在零件表面间相互转移,发展到一定程度就会形成金属磨屑。
零件间油膜抵抗剪切的能力不高,在高点处容易发生破裂,零件间表面的金属部分会发生直接接触,并且会产生摩擦热,产生较强的黏着,这些金属黏着点在相对运动时又会被剪断分离,表面损伤。
可以把黏着磨损的过程进行阶段划分:表面接触→高点塑性变形→油膜破裂→黏着连接→剪断分离→黏着链接的往复循环。
新能源车用电驱动桥的设计分析
新能源车用电驱动桥的设计分析摘要:随着人们生活水平的不断提高,对能源的消耗也在不断上涨,因此能源危机已经成为全球性的问题。
新能源技术的应用,对能源的消耗危机有了很大的改善,新能源不仅对环境不会造成污染,同时也将汽车的发展带到新型的领域。
电动汽车采用一种新型驱动系统,尤其是驱动桥的设计质量,直接会关系到新能源电动汽车的正常使用。
因此要加强电动汽车驱动桥的设计与研究,提升桥驱动桥设计能力,从而保障新能源车辆的正常使用。
关键词:新能源车;用电驱动桥;设计与分析为了满足群众对节能、少排的需求,新能源汽车正在逐步加快发展。
同时新能源汽车成本较低,能量消耗较少,在使用方面还有诸多的优点。
新能源汽车在驱动桥设计方面,摒弃了传统的发动装置,利用电驱动桥进行取代。
但是电驱动桥在使设计过程中也会遇到诸多问题,因此要提高电驱动桥的设计水平,从而保证产品的高效率、高寿命。
不仅可以提高整个车辆的使用寿命,同时也保证人们的生命安全。
一、新能源车用电驱动桥设计背景我国于2012年便提出了与新能源汽车有关的战略方针,对于新能源汽车的推广给予了各种支持,同时也对新能源汽车的各种零部件生产给予了各种经济扶持。
并且在2013年也在后续提出了各种相对的政策,对购买新能源汽车广大人群给予一定的经济补偿。
2017年又出台了各种关于新能源汽车使用的相关政策,以新能源为主题,也召开了诸多相关的会议,国家对于新能源汽车的广泛使用,给予了极大的重视。
能源汽车的广泛使用,不仅可以为国家节省更多的不可再生资源,同时也为消费者减少了油耗的消费。
另外,新能源电动车的推广,减少了各种尾气排放,在一定程度上保护了自然生态环境。
因此新能源汽车具有较高的发展前景,也会将我国的汽车行业带领到一个新的发展领域。
二、新能源车用电驱动桥介绍(一)前置驱动桥新能源车采用前置驱动桥,车体的整体舒适度会增加,同时车体的散热性能也会更好。
因此目前我国大部分的新能源电等汽车,多数都为前置驱动桥设计。
新能源车用电驱动桥的设计
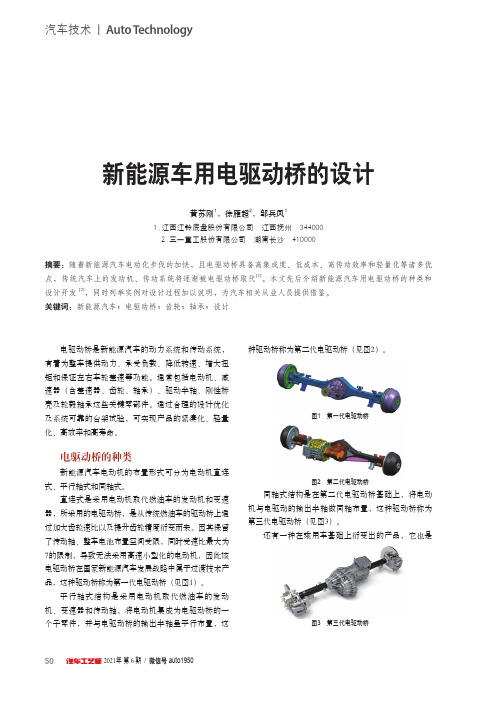
图4 承载与承扭分离型电驱动桥
从目前各整车厂及车桥企业的研究方向看,第二 代以及第三代电驱动桥可减轻电动机质量,降低整车 成本,提升整车续驶里程。其中第二代电驱动桥因其 前期投入低、技术易实现及性价比高,而备受市场青 睐,本文将以实例着重介绍。
众所周知,全浮式驱动桥较半浮式驱动桥有着更 好的刚度和更高的承载能力,轴承失效和油封漏油的 故障率更低。电驱动桥相较传统驱动桥的簧下质量和 设计载荷均有所增加,对驱动桥的各项性能要求也更 为严格。故在此摒弃半浮式驱动桥而优选全浮式第二 代电驱动桥进行设计。
轴承额定动载荷Cr/kN 轴承理论寿命(S10≥50万)/km
4100 2400 345.6 1720 1049 345.6 40.8 105 62.8
表11 刚性桥壳计算结果
电驱动桥满载负荷/kg 驱动轮滚动半径/mm 电动机最大输出转矩/N·m
减速比 后备系数 轮距B/mm 板簧中心距S/mm 满载时的质心高度hg/mm 桥管截面规格Dt/mm×mm 桥壳本体的总长L/mm 板簧表面到桥中心距h/mm 半轴套管危险断面外径D/mm 半轴套管危险断面内径d/mm 桥壳静弯曲应力(σ≤150)/MPa
汽车技术 | Auto Technology
黄苏刚1,徐雁超2,邹兵凤1
随着新能源汽车电动化步伐的加快,且电驱动桥具备高集成度、低成本、高传动效率和轻量化等诸多优 点,传统汽车上的发动机、传动系统将逐渐被电驱动桥取代[1]。本文先后介绍新能源汽车用电驱动桥的种类和 设计开发 [2],同时列举实例对设计过程加以说明,为汽车相关从业人员提供借鉴。
平行轴式结构是采用电动机取代燃油车的发动 机、变速器和传动轴,将电动机集成为电驱动桥的一 个子零件,并与电驱动桥的输出半轴呈平行布置,这
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
新能源汽车创新的电差速器及驱动桥--电动汽车的实践研究分享到:来源:舍弗勒贸易(上海)有限公司作者:牛铭奎发布:2012-09-05 订阅资讯摘要:本文介绍了一种用于混合动力汽车和电动汽车的创新的电动主动差速器,该产品已经过台架测试,并安装到某项目中的纯电动汽车上测试。
根据FZG 的原理的电差速器不仅能实现纯电动驱动,也使主动横向转矩分配成为可能。
开发电驱动差速器的目的在于优化电力驱动系统,包括使效率达到最高,以及设计的产业化实现和电驱动转矩分配的功能性验证。
关键词:轻量化差速器,电动主动差速器,电动汽车1、前言由于全球变暖以及化石燃料的缺乏,电动汽车驱动装置的开发成为新能源汽车研究的领跑者。
联邦德国政府希望在未来的十年内本国成为电动汽车领域的市场领先者。
即使没有电动车,我们汽车保有量在持续增加,也导致交通密度不断升高。
因此为了降低事故率,欧盟发起eSafety运动来实现一个大胆的目标,既把2010 年未来十年的道路交通死亡率降低一半。
但仅仅通过改善道路条件是不可能实现这个目标的。
车辆传动系统及控制系统必须更加智能化从而可以主动修正驾驶者所犯的错误。
有别于已经有或正在开发中的一些驾驶辅助系统;本文提出的用于在纯电动驱动系统的装置是一个全新的发明。
舍弗勒在早期开发正齿轮差速器的时候,就已经激发了将速差控制电机同轴的安装到差速器上的灵感。
最初的设计表明这是一种非常紧凑的传动系统。
如果差速器能把集成式的减速器和辅助电机组合到一起实现车辆之间的横向转矩高校分配,驾驶的操控性、舒适性、安全性将得到显著提升。
舍弗勒在Herzogenaurach的前期开发团队设计了这种被称为主动电差速器的系统的原型,并且在台架上进行了深入的测试和研究。
然后该团队将两个主动电差速器系统安装在一辆的AWD电动汽车上,进一步验证电驱动转矩定向分配系统在汽车前桥、后桥以及共作用模式下的优点和局限性。
2、舍弗勒轻量化差速器传统的差速器有平衡两轮间的不同转速的功能,比如在车辆转弯的时候。
在这种情况下轨迹半径大的车轮旋转速度要快于轨迹半径小的车轮。
但转矩的分配比率是固定的50:50%。
舍弗勒应用行星齿轮技术开发出优化体积和重量的正齿轮差速器,我们称之为量轻化差速器(图1)。
该差速器有对称齿轮、非对称齿轮两种不同型号,见图 1 中的(a)和(B)。
(a)型差速器有2 组行星齿轮副,每组行星齿轮副有3 个行星轮,因此有3 对行星轮。
在左右两边,同一个行星齿轮副的3 个行星齿轮对其对应的太阳轮啮合;而在中间区域上属于不同行星副的 3 对行星轮相互啮合。
这种设计要在两个太阳齿轮中间留有间隙。
(B)型差速器的设计初衷是为了最大化利用(a)型号差速器两个太阳齿轮之间的横向空间,进一步的减少差速器的体积和重量。
该设计把行星齿轮啮合平面移动到行星轮与太阳轮之间的啮合平面。
采取舍弗勒轻化差速器代替传统的锥型齿轮差速器可以为中级车的后桥减轻30%以上的重量和几乎70%的横轴空间。
图1:舍弗勒量轻化差速器(a、对称太阳齿轮和行星齿轮;B、非对称齿轮)3、主动差速系统与前述传统的差速器不同,所谓的主动差速器不仅平衡两轮的转速差,而且可以把驱动转矩独立的分配到每个车轮。
这就是转矩定向分配技术。
由于车轮上不同的圆周力,在车辆竖直轴上会产生一个偏转转矩,该力矩直接影响驾驶的动力性和稳定性。
与ESP 系统不同,主动转矩分配控制系统干预时并不会使车辆减速。
具有转矩定向分配功能的主动差速器安装在后桥上,能产生与目前的ESP 系统相同的效果,即防止车辆前轮转向不足;并因此提高车辆安全性和动力性能, 见图2。
同轴的不同车轮受到不同的驱动/制动转矩在车辆垂直轴线上产生偏转转矩。
主动的横向运动可显著提升车辆转弯和变向过程中的动力性能。
敏捷的驾驶表现不仅仅能提高驾驶的舒适度,还提升了驾驶安全性,比如在车辆做变道动作。
通过合理的车桥运动设计,作用在转向桥两侧车轮上的不同的驱动力将在转向杆方向上产生一个偏转转矩。
因而可通过设定横向转矩分配来实现转向锁定或转向助力。
更多的比如由于横向风和路面沟槽等因素造成的负面影响,可以通过动态的横向转矩分配控制来纠正,获得更忧的驾驶感觉。
此外偏转转矩可以实现一致的驾驶表现,例如对于一个给定的转向角产生的转弯半径是一定的,和车的载荷、速度无关;这一点至少在原理上是可行的。
图2:主动横向转矩分配的优点轮边转矩的控制是通过控制车轮的转速实现。
根据预设的滑差率曲线,可使车轮之间产生转矩差。
图3 显示了车轮转速和驱动转矩之间的关系。
如图3,在最初的(a)状态下,车辆直线行驶,两个后轮都以同样的速度和驱动转矩行驶,两个后轮上产生的滑动率相同。
我们假设现在左轮制动,由于整车驱动转矩不变此时右轮的驱动起来非常困难。
状态B 显示了左轮制动力矩和要求制动滑差之间的关系。
然而,不论左后轮上的制动力矩是怎样的,右轮上的驱动力矩必须增大到状态C 的程度以保证总驱动力不变,图3 的滑动曲线显示了右轮必须的工作点。
图3:车轮滑动率和驱动转矩关系通过滑差率与驱动力曲线的关系,要实现驱动轴上驱动转矩的定向分配则车轮速度必须发生变化;反之亦然。
因此,为了实现转矩定向传递功能所需的差速转矩,必须使一个车轮相对另一个车轮加速。
第一个基于离合器的主动转矩分配系统应用于三菱蓝瑟上,相似量产的还有应用于宝马X6 和奥迪S4的系统。
这些特殊设计的驱动单元具有附加传动齿轮组和液压控制盘式离合器或者机电控制盘式制动器,使得后桥的一个半桥加速,从产生差速度并主动的分配两轮间的转矩。
(参照图3)图4:液压控制盘式离合器的主动差速器(1、锥型齿轮差速器,2、耦合传动装置,3、盘式离合器,4、驱动转矩)4 电动主动差速器电动主动差速器是传统的基于离合器带有耦合传动装置的差速器的最佳替代者,该差速器通过连接到一个差速齿轮上的电动装置直接控制转速差。
目前,集成电动作动器装置和机械转矩分配机构的一体化系统仅仅处于概念设计阶段,实际硬件还没有实现;更别提将该系统作为一种主动(差速)系统在例如紧急避让等工况下进行应用的例子了。
这里我们用传统简单的锥齿轮差速器来描述主动差速器的功能,见图5。
如果差速器行星齿轮的旋转运动和一个电动装置耦合,则这个装置被差速器驱动。
反过来,通过电动装置发出一个转速也可以在车轮之间齿轮(差速器上对应半桥的太阳轮)上产生差速运动。
因为外部电动装置产生的驱动转矩使得行星齿轮的平衡杆不平衡,所以差速器的转矩分配也会变化。
这意味着在车轮上实现任何理论上可能的轮边转矩和速度分配。
这种主动差速器的基本优势是不再需要任何多余的组件,因为转矩的分配是直接在差速器内部完成的。
当两侧车轮的转速相同的时候电动装置处于静止状态,只有在进行主动分配转矩时才提供转矩。
但如图5 所示设计的不足之处是电动装置和差速器之间的转矩传递比率较低(锥齿),另外电动装置必须要随着半轴旋转。
为了避免这些缺点而保留电差速器的优势,我们根据FZG 原则对差速器做了重要的改进,下面介绍这种改良过的差速器,见图6。
图5:电差速器原理(1、锥齿轮差速器,2、传动装置,3、转矩定向分配电机,4、驱动齿轮)图 6 中,控制功能关闭时正齿轮差速器(1)在平均地将转矩分配到两个驱动车轮。
如图1b 所示,这个差速器是由两个不对称的太阳齿轮和三对相互啮合行星轮组成的行星齿轮装置。
差速器的行星齿轮分别与太阳轮啮合,每个太阳齿轮又与一个车轮相连。
这种形式的正齿轮差速器可以和外部行星齿轮装置组合,这一点非常重要。
正齿轮差速器中的三对行星齿轮理论上实现了锥齿轮差速器中轴间传动锥齿轮同样的功能。
根据图5 的原理,通过使正齿轮差速器的行星齿轮组产生相对运动就可以在两个车轮之间产生速度差;可通过由主动行星齿轮装置(2)和耦合传动装置(3)的组成的传动装置完成的。
主动行星齿轮装置(2)与差速器(1)共轴并且共用其中的同一个行星齿轮。
如果差速器(2)中的太阳齿轮对于齿圈转动,就迫使其行星齿轮以相对应的速度转动,这就是车轮上能产生速度差的原因。
正齿轮差速器中内侧的行星齿轮的相对转速相当于图5 中锥齿轮差速器中行星齿轮的转速。
图6:电动差速原理(1、正齿轮差速器,2、主动行星齿轮装置,3、耦合传动装置,4、转矩定向分配电机,5、驱动齿轮)耦合传动装置可降低横向力分配所需的轮边转矩,从而降低电机的定向转矩。
与原来FZG 的概念不同的是耦合传动装置(3)的两个同样的行星齿轮装置共用同一个轴。
转矩通过两个独立但相同的行星系输出,其中一个(2)的齿圈的太阳轮相连,另一个(2)的外齿圈相连。
开发早期阶段的仿真显示,相比FZG 原来设计的通过两个独立的行星架输出的方式,这种布置对于行星齿轮装置的变形更不敏感。
耦合传动装置的变形导致给转矩定向分配单元倾向于自锁。
耦合传动装置中(3)的一个太阳齿轮是固定在壳体上的,另一个太阳齿轮和控制电机相连。
当控制电机输出转矩时,耦合传动装置使同(3)中的两个外齿圈朝反方向转动,在耦合齿轮(2)的太阳齿轮和外齿轮上产生相反的转矩。
如果控制电机静止不转,在差速器行星齿轮上不能产生差速运动。
因为此时耦合齿轮的太阳齿轮和齿圈运动速度相同,当然车轮的转速也就相同。
如果耦合传动机构不转动,就不会产生任何差速转矩,车轮转矩是一样的(不计传动损失),且控制电机不提供任何转矩。
当车辆行驶过弯时,控制电机也是被动的,不需要差速转矩。
如图6,如果耦合传动装置关闭,该装置会像传统差速器一样运行,只是自锁值略高。
对于每个车轮都有一个驱动电机的系统来说,本文的系统实现转矩分配的功能所需的电能要少很多。
车轮驱动转矩的总和并不由耦合传动系统,即车轮间的转矩差决定。
因此,控制系统可以相当的简单。
图7:舍弗勒主动电差速器的原理图(1、正齿轮差速器(非对称型),2、主动行星齿轮装置,3、耦合传动装置,4、转矩定向分配电机,5、行星减速器,6)主驱动电机)8:舍弗勒电动主动差速器设计图舍弗勒高级开发团队,将图 6 所示的电动转矩分配系统整合成为一个电驱动单元。
这个电驱动单元是为一款全时四驱的中级车设计的(图7)。
主动电差速器由以下两个基本单元组成,“电差速器”和“主动转矩分配系统”[2][3]。
这两个基本单元都与车的半轴同轴,而量轻化差速器是其连接装置。
主动电差速器的最终设计如图8 所示,其主要技术参数列在表1中。
5 舍弗勒电动汽车在主动电差速器早期的开发阶段,为了尽可能在实际工况下测试其性能,舍弗勒不仅仅要在台架上面测试,还进行了电动汽车的整车测试。
我们选择了斯柯达明锐Scout 的 1.8TSI AWD 版本作为测试电动汽车的平台。
全时四驱系统为调查主动转矩分配系统在前后桥的作用提供了最大的自由度。
这意味着在相同的驾驶情况下可以对前驱,后驱,和四驱的状况分别进行测试。