微电网下垂控制的稳定性、功率分配与分布式二级控制
《2024年低压微电网中下垂控制的研究》范文

《低压微电网中下垂控制的研究》篇一一、引言随着分布式能源的快速发展和微电网技术的日益成熟,低压微电网系统在电力供应中的地位日益重要。
下垂控制作为微电网中的关键控制策略之一,其性能的优劣直接影响到微电网的运行稳定性和供电可靠性。
因此,对低压微电网中的下垂控制进行研究,具有重要的理论价值和实际应用意义。
二、低压微电网概述低压微电网是指以低压配电系统为基础,集成了分布式电源、储能装置、负荷等元素,通过一定的控制策略实现能量优化管理和独立运行的电力系统。
其具有灵活性强、可靠性高、环境友好等优点,在居民区、工业园区、偏远地区等供电领域有着广泛的应用前景。
三、下垂控制基本原理下垂控制是一种基于电压和频率的下垂特性的控制策略,通过模拟传统电网中发电机组的下垂特性,实现微电网中分布式电源的有功和无功功率的分配。
当微电网中负荷发生变化时,下垂控制能够根据各分布式电源的输出功率和电压、频率等参数,自动调整其输出,以维持微电网的稳定运行。
四、低压微电网中下垂控制的研究现状目前,关于低压微电网中下垂控制的研究主要集中在以下几个方面:1. 控制策略的优化:通过对下垂控制的参数进行优化设计,提高微电网的电压和频率稳定性,减小了分布式电源之间的功率分配误差。
2. 鲁棒性研究:针对微电网中可能出现的各种扰动和故障,研究下垂控制的鲁棒性,提高其在不同运行条件下的适应能力。
3. 协调控制策略:将下垂控制与其他控制策略相结合,如分层控制、能量管理等,实现微电网内各元素之间的协调运行。
五、低压微电网中下垂控制的挑战与展望尽管下垂控制在低压微电网中已经得到了广泛的应用和研究,但仍面临一些挑战和问题。
如:1. 分布式电源的多样性和异构性:随着分布式电源种类的增多和规模的扩大,如何实现各种电源之间的协调运行和功率分配是下垂控制面临的重要问题。
2. 通信延迟和不确定性:在微电网中,各元素之间的信息交互依赖于通信网络,通信延迟和不确定性可能对下垂控制的性能产生影响。
微电网双重下垂控制策略的研究
微电网双重下垂控制策略的研究
汪玉凤;李琳;王立辉;张志强
【期刊名称】《高压电器》
【年(卷),期】2018(54)6
【摘要】当低压微电网由并网过渡到孤岛运行时会出现功率缺额的现象,导致微电网无法保持电压和频率稳定。
文中提出了双重下垂控制的策略,即在改进耦合下垂
控制同时,又增加一层对于直流总线电压响应的下垂控制。
该控制策略能够在这孤
岛模式和并网模式下工作,实现自动调节微电源的输出功率。
此外,该控制策略还解
决了孤岛模式和并网模式之间的切换不平滑的问题。
对提高微电网的电能质量和供电可靠性具有重要意义。
以上所提出的控制策略通过MATLAB仿真验证其有效性。
【总页数】5页(P212-215)
【关键词】双重下垂控制;微电网;孤岛模式;并网模式
【作者】汪玉凤;李琳;王立辉;张志强
【作者单位】辽宁工程技术大学电气与控制工程学院;国网辽宁省电力有限公司阜
新供电公司
【正文语种】中文
【中图分类】TM727
【相关文献】
1.基于电网二次调频原理的微电网下垂控制策略改进研究
2.孤岛运行下微电网并联逆变器下垂控制策略研究
3.微电网改进下垂控制策略研究
4.孤岛微电网中基于电
压-频率下垂与磁链-相角下垂两种控制策略的性能比较5.基于SOC下垂控制的独立直流微电网协调控制策略研究
因版权原因,仅展示原文概要,查看原文内容请购买。
《2024年微电网逆变器PV-QF下垂控制技术的研究》范文

《微电网逆变器PV-QF下垂控制技术的研究》篇一微电网逆变器PV-QF下垂控制技术的研究一、引言随着可再生能源的快速发展和微电网技术的日益成熟,微电网逆变器作为微电网系统中的关键设备,其控制技术成为了研究的热点。
PV(Power-Voltage)下垂控制和QF(Quadrature-Frequency)下垂控制作为两种重要的逆变器控制策略,在微电网的稳定运行和功率分配中发挥着重要作用。
本文将重点研究微电网逆变器中PV/QF下垂控制技术,分析其原理、特点及在微电网系统中的应用。
二、PV下垂控制技术研究1. PV下垂控制原理PV下垂控制是一种基于电压和频率的下垂控制策略,通过调整逆变器的输出电压和频率来实现功率的分配。
在微电网系统中,当负载发生变化时,PV下垂控制能够根据电压和频率的偏差自动调整输出功率,从而保持系统的稳定运行。
2. PV下垂控制特点PV下垂控制具有响应速度快、控制精度高、动态性能好等优点。
它能够根据微电网系统的实际运行情况,实时调整逆变器的输出功率,实现对系统的有效控制。
此外,PV下垂控制还具有较好的兼容性,能够适应不同类型的负载和电源。
三、QF下垂控制技术研究1. QF下垂控制原理QF下垂控制是一种基于无功功率和频率的下垂控制策略。
它通过调整逆变器的输出频率和无功功率,实现微电网系统的功率分配和稳定运行。
在QF下垂控制中,当系统频率发生偏差时,逆变器将根据设定的下垂系数调整输出无功功率,从而恢复系统频率到正常范围。
2. QF下垂控制特点QF下垂控制具有较高的稳定性和可靠性。
它能够快速响应系统频率的变化,并通过调整无功功率实现功率的分配。
此外,QF 下垂控制还具有较好的分散性控制特点,适合于分布式微电网系统的应用。
四、PV/QF下垂控制在微电网系统中的应用PV/QF下垂控制在微电网系统中的应用具有重要意义。
通过合理的控制策略和参数设置,可以实现微电网系统的稳定运行和高效能量管理。
在微电网系统中,PV/QF下垂控制可以与其他控制策略相结合,实现对系统的优化调度和故障恢复。
《2024年低压微电网中下垂控制的研究》范文

《低压微电网中下垂控制的研究》篇一一、引言随着分布式能源的快速发展和微电网技术的不断进步,低压微电网在供电系统中的地位愈发重要。
而微电网的下垂控制技术是保障微电网安全稳定运行的关键。
本文着重研究了低压微电网中下垂控制的原理、特性及实施方法,并就其在实践中的应用进行了深入探讨。
二、低压微电网概述低压微电网是指以低压配电系统为基础,集成了分布式电源、储能设备、负荷等元素,通过一定的控制策略进行能量管理和优化分配的供电系统。
它具有灵活的拓扑结构、可再生的能源接入能力以及高效能量管理等特点,在提高供电可靠性和经济性方面具有显著优势。
三、下垂控制原理及特性下垂控制是一种基于电源输出阻抗特性的控制策略,通过模拟电网中传统同步发电机的下垂特性来实现电源之间的功率分配。
其基本原理是利用电力电子设备模拟传统发电机组的输出阻抗和调压调频特性,根据电压和频率的变化来调整输出功率,从而达到功率分配的目的。
下垂控制具有以下特性:1. 自主性:下垂控制不需要中央控制器,各电源单元可以独立运行,实现分布式控制。
2. 适应性:能够根据微电网中负荷的变化自动调整输出功率,实现功率的动态分配。
3. 鲁棒性:对系统参数的变化和扰动具有一定的抵抗能力,能够保持微电网的稳定运行。
四、下垂控制在低压微电网中的应用下垂控制在低压微电网中的应用主要体现在以下几个方面:1. 功率分配:通过下垂控制策略,可以实现微电网中多个电源之间的功率分配,提高供电的可靠性和经济性。
2. 频率和电压调节:下垂控制能够根据微电网的频率和电压变化,自动调整电源的输出功率,从而维持系统的频率和电压在允许范围内。
3. 能量管理:结合能量管理系统,下垂控制可以实现能量的优化分配,提高微电网的能效。
五、实施方法及挑战实施下垂控制需要遵循以下步骤:1. 设计合适的下垂特性曲线,确定电源的输出阻抗和调压调频特性。
2. 选择合适的电力电子设备,如逆变器、变流器等,实现下垂控制功能。
基于下垂控制的低压直流微电网功率分配策略的研究
基于下垂控制的低压直流微电网功率分配策略的研究
随着能源需求的不断增长,低压直流微电网作为一种新型的能源分配方式逐渐受到人们的关注。
然而,由于微电网内部节点电压的下垂现象,导致电能无法有效地分配和利用。
因此,本文旨在研究基于下垂控制的低压直流微电网功率分配策略。
首先,本文分析了低压直流微电网中节点电压下垂的原因。
在微电网中,由于线路电阻和电感等因素的影响,节点电压会出现下降现象。
这种下垂现象会导致电能无法均匀分配到各个节点,从而影响微电网的整体运行效率。
接着,本文提出了一种基于下垂控制的低压直流微电网功率分配策略。
该策略通过对微电网中的节点电压进行实时监测和控制,以实现电能的均匀分配。
具体来说,当节点电压下降到一定程度时,系统会自动调节节点电压并将电能重新分配到其他节点,从而保持微电网的整体电压稳定。
此外,本文还设计了一个基于下垂控制的低压直流微电网功率分配系统。
该系统由电能储存装置、电能转换器和控制器组成。
电能储存装置用于存储和释放电能,电能转换器用于将直流电能转换为交流电能,控制器则负责对节点电压进行监测和调节。
最后,本文通过实验验证了基于下垂控制的低压直流微电网功率分配策略的有效性。
实验结果表明,该策略能够显著提高微
电网的电能利用效率,并保持节点电压的稳定。
同时,该策略还能够降低微电网的能源损耗,提高能源利用率。
综上所述,基于下垂控制的低压直流微电网功率分配策略具有重要的研究和应用价值。
通过该策略,可以有效解决低压直流微电网中节点电压下垂的问题,提高电能的分配效率和利用率,进一步推动低压直流微电网的发展和应用。
采用下垂控制的微电网稳定性研究说明书
目录摘要 (III)关键词 (III)ABSTRACT (IV)KEY WORDS (IV)第1章绪论............................................................. - 1 - 1.1论文的研究背景与意义 .. (1)1.2微电网的发展现状 (1)1.3论文的主要研究内容 (2)第2章微电网的数学建模................................................. - 3 - 2.1三相逆变器的数学模型 .. (4)2.2LC滤波器和耦合电感数学模型 (4)2.3功率环的数学模型 (5)2.4电压电流双环控制器的数学模型 (6)2.5线路模型 (7)2.6负荷模型 (7)2.7微电网下垂控制系统的完整数学模型 (8)第三章微电网的运行控制方式............................................. - 8 - 3.1微电网的运行控制 (8)3.2下垂控制 (9)第四章采用下垂控制的微电网仿真........................................ - 10 - 4.1微电网下垂控制总仿真图.. (10)4.2逆变器与滤波器仿真模型 (11)4.3下垂控制器仿真模型 (11)电压电流双环控制器的仿真........................................... - 13 - 4.4仿真验证. (14)第五章结论............................................................ - 16 - 参考文献............................................................... - 17 - 致谢........................................................ 错误!未定义书签。
《微电网逆变器PV-QF下垂控制技术的研究》范文
《微电网逆变器PV-QF下垂控制技术的研究》篇一微电网逆变器PV-QF下垂控制技术的研究一、引言随着可再生能源的日益普及和微电网技术的发展,微电网逆变器作为连接分布式电源与电网的关键设备,其控制策略的优劣直接影响到微电网的稳定性和效率。
PV/QF下垂控制技术作为一种典型的控制方法,能够有效地协调逆变器之间的功率输出,保障微电网的稳定运行。
本文将深入探讨微电网逆变器中PV/QF下垂控制技术的原理、实现方式及其在微电网中的应用。
二、PV/QF下垂控制技术概述PV/QF下垂控制技术是一种基于逆变器输出电压和频率的下垂特性控制方法。
它通过模拟传统电网中发电机的下垂特性,实现逆变器之间的功率分配和电压、频率的调节。
PV代表光伏发电,QF则代表无功功率和频率。
该技术能够根据微电网的运行状态,自动调整逆变器的输出功率,以实现微电网的功率平衡和稳定运行。
三、PV/QF下垂控制技术的原理与实现1. PV下垂控制原理PV下垂控制主要是通过调节逆变器的输出电压来控制有功功率的输出。
当微电网中光伏发电的功率过剩时,逆变器通过降低输出电压来减少有功功率的输出;反之,当光伏发电的功率不足时,逆变器则通过提高输出电压来增加有功功率的输出。
2. QF下垂控制原理QF下垂控制则是通过调节逆变器的输出频率和无功功率来实现的。
在微电网中,无功功率的分配对于维持电压稳定具有重要意义。
QF下垂控制可以根据微电网的需求,自动调整逆变器的无功功率输出,从而维持电压的稳定。
四、PV/QF下垂控制在微电网中的应用PV/QF下垂控制在微电网中的应用,主要体现在以下几个方面:1. 功率分配:通过PV/QF下垂控制,微电网中的逆变器能够根据自身的运行状态和微电网的需求,自动调整输出功率,实现功率的合理分配。
2. 电压频率控制:PV/QF下垂控制能够根据微电网的电压和频率变化,自动调整逆变器的输出电压和频率,从而维持微电网的稳定运行。
3. 故障隔离:当微电网中出现故障时,PV/QF下垂控制能够帮助逆变器快速响应,实现故障隔离,保障微电网的安全运行。
《低压微电网中下垂控制的研究》范文
《低压微电网中下垂控制的研究》篇一一、引言随着分布式能源的快速发展和微电网技术的不断进步,低压微电网已成为现代电力系统的重要组成部分。
下垂控制作为微电网中一种重要的控制策略,对于维持系统稳定、优化资源分配以及提高供电可靠性具有重要意义。
本文旨在研究低压微电网中的下垂控制技术,分析其工作原理及实施策略,为微电网的优化运行提供理论支持和实践指导。
二、低压微电网概述低压微电网是指以低压配电系统为基础,集成了分布式发电、储能装置、负荷等元素的微型电力系统。
它具有灵活性强、供电可靠性高、环境污染小等优点,在家庭、企业、园区等场景中得到了广泛应用。
三、下垂控制原理下垂控制是一种基于电源输出阻抗特性的控制策略,通过模拟电力系统中的自然下垂现象,实现电源间的功率分配和电压调节。
在微电网中,下垂控制主要通过调整逆变器输出电压与频率的关系,使各电源根据自身输出功率自动调整电压和频率,从而达到功率共享和电压稳定的目的。
四、下垂控制的实现策略1. 电压电流双环控制:通过引入电压外环和电流内环的双环控制策略,实现对逆变器输出电压和电流的精确控制,从而实现对下垂特性的有效调节。
2. 功率分配策略:根据微电网中各电源的容量和负荷需求,制定合理的功率分配策略,确保各电源间的功率分配合理,避免过载或欠载情况的发生。
3. 通信协调机制:通过引入通信系统,实现各电源之间的信息交互和协调,提高下垂控制的动态性能和稳定性。
五、下垂控制在低压微电网中的应用下垂控制在低压微电网中具有广泛的应用价值。
首先,它能够实现电源间的自动功率分配,提高系统的供电可靠性和经济性。
其次,下垂控制能够快速响应负荷变化,保持系统电压和频率的稳定。
此外,下垂控制还能与储能装置、需求侧管理等技术相结合,进一步优化微电网的运行性能。
六、挑战与展望虽然下垂控制在低压微电网中取得了显著的成效,但仍面临一些挑战。
首先,如何准确测量和估计系统参数,以实现精确的下垂控制是一个关键问题。
微电网的分层控制研究_黎金英

第31卷第5期2014年10月现 代 电 力Modern Electric PowerVol.31 No.5Oct.2014文章编号:1007-2322(2014)05-0001-06文献标志码:A中图分类号:TM727微电网的分层控制研究黎金英,艾 欣,邓玉辉(华北电力大学电气与电子工程学院,北京 102206)Study on Hierarchical Control of MicrogridLe Kim Anh,AI Xin,Dang Ngoc Huy(School of Electrical and Electronic Engineering,North China Electric Power University,Beijing 102206,China)基金项目:国家重点基础研究发展计划项目(973计划)(2009CB 219706)摘 要:微电网技术具有许多优点,然而微电网中的分布式电源自身的不稳定性将导致微电网的运行控制困难。
针对此问题,提出了分层控制方法。
这种控制方法将分层控制分为三层,每一层独立完成自身的控制任务,通过通信通道向下层传达命令,且传达命令过程中不会影响系统的稳定性。
基于下垂控制方法,微电网分层控制的第一层为分布式电源和负荷控制,第二层为在第一层控制信号基础上的频率和电压幅值控制,第三层为微电网功率和主网功率控制。
利用Matlab/simulink对微电网接入主电网进行建模仿真,结果表明分层控制方法能够较好地实现对微电网的控制。
关键词:分布式电源;微电网;并网运行;下垂控制;分层控制Abstract:Though microgrid technology has many advanta-ges,the instability of distributed generations in microgridwill make it hard to control system operation.So a hierar-chical control method is proposed in this paper,in which thehierarchical control structure is divided into three levels.Each level accomplishes its own control tasks,and controlcommand is transmitted to the lower level through communi-cation channel.Moreover,the communication process ofthe control command should not affect the control systemstability.Based on the droop control method,the first levelof the microgrid hierarchical structure controls distributedgenerations and loads,and gives control signals to the sec-ond level to control frequency and voltage magnitude.In thethird level,power exchanges between the microgrid and thepower grid can be controlled.In this paper,Matlab/Simu-link software is used to build a model of microgrid connectedto power grid.The simulation results show that hierarchicalcontrol has good control effectiveness for mircrogrid.Keywords:distributed generation;microgird;grid-connect-ed;droop method;hierarchical control0 引 言微电网是包括分布式电源(Distributed genera-tion,DG)、储能装置、能量变换装置、负荷、保护装置集中而成的小型系统[1]。
微电网下垂控制的稳定性、功率分配与分布式二级控制教材
微电网下垂控制的稳定性、功率分配与分布式二级控制摘要出于对智能电网技术最近的和不断增长的兴趣,我们研究了微电网中的下垂控制DC/AC逆变器运算。
我们提供一个存在唯一的和局部指数稳定的同步解决方案的必要和充分条件。
我们提出了一个选择控制器在逆变器之间有理想的电源共享,并且指定该组的负载,它可以不违反给的的驱动约束下实现。
此外,我们提出了一个分布式的基础上平均积分控制器算法,动态调节系统频率一个随时间变化的负载的存在。
值得注意的是,这分布平均积分控制器有额外的性质保持功率共享特性的主要下垂调节器。
最后,我们目前的实验结果验证我们的控制器设计。
我们的研究结果在没有假设有相同的线性调节和电压幅值也成立。
引言微电网是低压配电网络,不均匀组成的分布式发电,存储,负载,和从更大的主要网络中自主管理的网络。
微电网是能够连接到广域电力系统通过一个共通点联轴器(PCC),但也“孤岛”自己和独立运作[1]。
在微网能源发电可以是高度异质性,包括光伏发电,风能,地热能,微型涡轮机等许多这些来源产生或者可变频率的交流电源或直流电源,具有同步交流电网通过电力电子接口DC/ AC逆变器。
它在孤岛的操作,是通过这些逆变器,必须采取措施以确保同步,安全性,动力平衡性和负载均衡在网络中[2]。
所谓的下垂控制器已成功地用于实现这些任务,请参见[2] - [7]。
尽管形成的基础并联逆变器的操作(图2),下垂控制从未逆变器和负载网络受非线性分析[8]。
小信号稳定性分析两个逆变器并联运行的下[9] - [12]和参考文献中的各种假设。
所呈现的稳定性结果依赖于线性约已知的操作点,两个逆变器的特殊情况下,有时会打包带无关的假设[5]。
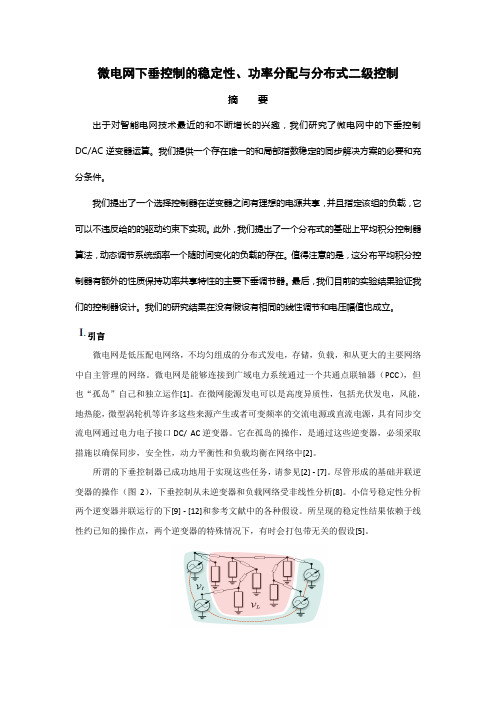
图1微电网的示意图,与四个逆变器(节点VI)提供负载(节点VL),通过非循环互连。
之间的逆变器的虚线代表的通信链路,这将是专门用于第六部分。
在这项工作中,我们调查我们最近的理论结果同步,共享,和次级控制的微电网[13]。
基于下垂控制的直流微网的分层控制的研究

226
黄芳辰,惠晶
级控制实现与外界能量的交换。 本文的具体直流微网分层控制图如图 5 所示,便于简化,将直流电网用外部直流源代替。这里,此
直流电网可为一个直流配电系统或者连接到电网交流部分的 DC/AC 的变换器前端母线。
4.1. 一级控制
本文的一级控制由传统的下垂控制和电压电流组成的内环控制器构成,内环控制器的目标就是维持
4.2. 二级控制
为解决一级控制的电压偏离,采用二级控制。在补偿器的作用下,可以较好的补偿来自下垂控制的 电压的降落。补偿器的输出 δV0 等于 RDI0,由 6 式可知,即可得出V0* = Vref ,从而使电压恢复到额定电压。
上文已经讨论过二级控制过程,这里不再赘述。当微网连接到直流电网时(为简化,这里采用直流源 代替),首先测量直流电网的电压,该电压作为二级控制层的参考电压。接着,在同步过后,通过静态旁
为解决上述问题,本文采用一种外部控制环,称为二级控制,二级控制用来补偿电压的偏离。二级 控制器也将微网电压同步于电网电压。在同步后,额外的三级控制器管理微网和电网之间的功率流动。
2. 传统下垂控制
为研究传统下垂控制对双变换器的电流分配,本文将两变换器并联,简化图如图 1 所示。
传统下垂控制数学表达式为:
当直流微网运行时,微网中分布源和负载或外电网之间实现能量传递通常是功率电子变换器。为避 免并行运行于微网的功率变换器之间出现环流和不采用通信装置的方式下,下垂控制方法经常得以应用。 下垂方法由输出电压的负比例环节构成。于是,虚拟输出阻抗可实行于该控制环中。该控制环,又称自 适应电压定位,已被应用于提高电压调节的暂态响应。然而,负比例部分会导致电压幅值的下降,即所 谓的电压偏离。并且,供应输出功率越多,引起电压的偏离也越多。
微网中可维持母线电压恒定的下垂控制

微网中可维持母线电压恒定的下垂控制作者:贾磊磊张旭周涛陶者青来源:《科技资讯》2016年第16期摘要:由于传统下垂控制会使电压幅值和频率产生偏移,瞬时响应速度受限,以及由于线路阻抗不匹配所造成的环流等问题,提出了基于线路压降补偿的可减小微网母线电压幅值偏移的下垂控制理论,并且该方法可维持逆变电源本地输出电压幅值和频率的稳定。
针对实际低压微网系统中线路阻抗为阻性,首先忽略线路阻抗中感抗成分,修正传统下垂控制模型,改进系统稳定性和瞬态响应;其次基于传统电网中二次调频理论,控制器增加电压幅值和频率的无差调节,维持逆变电源本地输出电压幅值和频率的稳定;再次,考虑逆变器到微网母线之间传输线上的电压降,控制器再加入传输线路压降补偿。
最后通过仿真验证了所提出方法的正确性。
关键词:微电网母线;下垂控制;电压稳定;频率恒定;分布式发电中图分类号:TM464 文献标识码:A 文章编号:1672-3791(2016)06(a)-0000-001 引言化石燃料是现阶段人类所需能源的主要来源,但化石能源的不可再生性及其大规模使用造成的环境问题使其面临着双重压力。
因而人们在寻求一种可再生环境友好型的绿色能源来补充化石能源,甚至是替代化石能源。
风能,太阳能生物能源都是解决的途径,但现今上述可再生能源的使用通常是以分布式能源出现的,分布式能源又通过微电网的形式间接的接入主电网,因而微网中分布式能源的控制方式成为研究的热点。
现今已有的微网中分布式能源的控制方式有主从控制方法,平均电流控制方法,以及频率电压的下垂控制[1]。
主从控制方法选定一个电压源逆变电源做为主控单元,其他的分布式电源做为从属单元,主控单元负责维持系统中电压幅值和频率的稳定,并且产生从属单元所需的电流信号[2-3]。
主从控制有其自身的优点,就是无需锁相环节,并且达到很好的负载分配的效果,并且线路阻抗的特性不影响负载分配的效果。
但其自身也存在着很严重的缺陷,其系统冗余性差,主控节点的失控会导致整个系统的不稳定,且整个系统的稳定依靠从属单元达到一定的数量,以及主控单元与从属单元需要通信和控制总线进行连接,因而对分布式发电来说可靠性差。
分布式电源在微电网中的调度与稳定性控制
分布式电源在微电网中的调度与稳定性控制近年来,随着能源需求的增长,传统电网已经开始出现一些问题。
由于单一形式的能源供给模式会导致电网的不稳定性和各种不可预测的风险,所以各种新型能源技术在不断的探索中也随之崛起。
分布式电源,在其中发挥了重要作用,成为了微电网和智能电网的支柱技术之一。
为了确保电网的稳定性和安全性,分布式电源的调度和控制十分关键。
一、分布式电源分布式电源是指分布在用电者附近的小型或微型能源中心。
它们不仅能够提供必要的能源,而且还能够在电网中起到平衡各种问题的作用。
分布式电源可以包括不同形式的发电机、储能器、用于产生热能和热泵系统的余热回收设备以及其他类型的能源。
日益丰富多样的可再生能源技术也在不断的推动着分布式电源的发展,例如,太阳能发电、风能发电和地热能发电等等。
二、微电网微电网是指以一个小范围内的负载为中心建立的、自给自足的电力系统。
其不需要依靠传统电网的支援,而是利用分布式电源和能源管理技术自行消耗产生的电力。
为了保证微电网的稳定性,可以通过实时控制、协调和调节分布式电源等措施来进行维护。
三、分布式电源在微电网中的调度在微电网中,分布式电源的调度扮演了至关重要的角色。
分布式电源的调度目标是维持微电网的电力平衡,最大化其经济性和可靠性。
同时,调度还可以通过避免负载过大和过载等行为来防止微电网发生故障。
因此,在微电网中进行有效的分布式电源调度十分关键。
(一)分布式电源的接入控制分布式电源的接入控制是调度的第一步。
微电网可以通过选择分布式电源的接入时机和容量等来控制其总体供能情况,从而影响微电网的总体能源流量。
(二)能源管理能源管理是指对电网中的各种能源进行有效的协调和调节。
对于分布式电源来说,能源管理可以通过分配其出力来协调电网的电力供给与需求,避免负载不均和电压失衡现象的发生。
这些管理手段可以包括能量调度、功率调度等。
(三)能量储存能量储存是微电网保持平衡并保证微电网站群靠谪细煞谎燃出转换的重要手段。
基于下垂控制的直流微电网小扰动稳定性分析
基于下垂控制的直流微电网小扰动稳定性分析下垂式能源系统当中的微型电网技术,是当代世界电力系统应用当中的新型技术之一,是电力系统所应用的最新的科技成果之一,它是将现代的能源转换、电网、电力电子以及自动控制等技术有机的相互结合而发展起来的。
下垂式的能源系统,是以其最为优化的投资、最有为效的对能源的利用,能灵活变负荷性以及合适的可再生能源等等的特性,成为了集中式的能源供体系当中不可缺少的、重要的补充,它是未来世界上能源技术发展的重要方向。
标签:多储能;直流微电网;下垂式控制微电网一般应具备两种常态运行模式,即独立运行模式和联网运行模式。
微电网控制的研究包含两个方面:一个是微电网的整体控制策略,主要研究微电网内各微电源之间的协调和配合;另一个是微电源的控制策略,主要针对微电源的输出特性进行研究。
依据微电网独立运行模式下,各下垂式电源所发挥的作用不同,微电网控制模式可以分为主从控制模式、对等控制模式和分层控制模式。
1直流微电网下垂式控制的意义随着集中式发电的有效补偿机构逐渐完善,基础的下垂式控制结构也开始逐渐优化,在直流微电网内运行基础的下垂式控制,既能,满足电源管理结构的完整,并且对基础的可再生资源进行最优化的使用,也能有效实现下垂式电源的便捷操作。
直流微电网的高速发展需要相关技术人员借鉴交流微电网技术,由于不需要对基础电压相位以及频率进行实时的跟踪,整体系统的控制结构较于交流微电网更加快捷便利,并且整体系统的能耗比较小,更加易于扩展,也非常适用于下垂式电源以及负载项目的接入。
2下垂式控制系统理论概述2.1下垂式控制系统理论下垂式计算机系统的主题是多种多样的,许多研究人员在研究有关下垂式硬件结构和下垂式软件设计的各方面问题以开发利用其潜在的并行性和容错性。
下垂式系统是运行在每个处理单元有各自的物理存储器空间并且消息的传输延迟不能忽略不计的一系列自治处理单元上的系统,这些处理单元间密切地合作。
当用户需要完成任务时,下垂式计算机系统都将提供尽可能多的计算机处理能力和数据的透明访问,同时,实现高性能和高可靠性目标。
基于下垂控制的自治微电网建模与稳定性分析

Z A G C u - ag A h-h n ,ME G X a — a ,G O Z o gn n H N h nj n ,K N Z i o g i z N i m i U h n -a o
( asa nvri ,Qn und o0 6 0 ,C ia Y nh n U i sy ih ag a 6 0 e t 4 hn )
t e ot g a l u e n  ̄e u n y, h l h h n e o h o d p we C U T e vru l p w r d o p o t l s h v l e mp i d a d a t q e e w i t e c a g f t e l a o r O C  ̄. h i a o e r o c n r i e t o
第4 6卷 第 1 0期
21 0 2年 1 月 0
电 力 电 子 技 术
Po rElcr nis we e to c
Vo .6,No 1 1 4 .0 Oco e 0 2 tb r2 1
基于下垂控制的 自治微 电网建模 与稳定性分析
张 纯 江 ,阚 志 忠 ,孟 晓脉 ,郭 忠 南
中 图 分 类 号 : 2 231 V4. 文 献 标 识 码 : A 文 章 编 号 :0 0 1 0 2 1 )0 0 2 — 4 10 — 0 X(0 2 1 — 0 3 0
M o e i n St b lg a d a iiy An l ss o t no us M c o r d Co s d Ba e n I pr v d o p Co t o sd o m o e Dr o n r l
d mo sr t h s l ce c n r l a d i e p r mee s E p r n s r a re u n t e x e me t l t r c n e n tae t e e e td o t n l a a tr . x e i o n me t ae c ri d o t o h e p r n a p a om o — i l f t l d b MS 2 F 8 2 DS . h e u t h w t a h o r c n b e l e l a d t e s se o e ain i sa l o e r l y T 3 0 2 1 P T e r s ls s o h t t e p we a e r ai d wel n h y t m p r t s tb e z o i h n q a u p t l e i e a c . n t e u e u o t u i mp d n e l n Ke wo d mir g i y r s: c o rd;i v r r r o o t l s b l y a ay i n e e ;d o p c n r ; t i t n ss t o a i l
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
微电网下垂控制的稳定性、功率分配与分布式二级控制摘要出于对智能电网技术最近的和不断增长的兴趣,我们研究了微电网中的下垂控制DC/AC 逆变器运算。
我们提供一个存在唯一的和局部指数稳定的同步解决方案的必要和充分条件。
我们提出了一个选择控制器在逆变器之间有理想的电源共享,并且指定该组的负载,它可以不违反给的的驱动约束下实现。
此外,我们提出了一个分布式的基础上平均积分控制器算法,动态调节系统频率一个随时间变化的负载的存在。
值得注意的是,这分布平均积分控制器有额外的性质保持功率共享特性的主要下垂调节器。
最后,我们目前的实验结果验证我们的控制器设计。
我们的研究结果在没有假设有相同的线性调节和电压幅值也成立。
引言微电网是低压配电网络,不均匀组成的分布式发电,存储,负载,和从更大的主要网络中自主管理的网络。
微电网是能够连接到广域电力系统通过一个共通点联轴器(PCC),但也“孤岛”自己和独立运作[1]。
在微网能源发电可以是高度异质性,包括光伏发电,风能,地热能,微型涡轮机等许多这些来源产生或者可变频率的交流电源或直流电源,具有同步交流电网通过电力电子接口DC/ AC逆变器。
它在孤岛的操作,是通过这些逆变器,必须采取措施以确保同步,安全性,动力平衡性和负载均衡在网络中[2]。
所谓的下垂控制器已成功地用于实现这些任务,请参见[2] - [7]。
尽管形成的基础并联逆变器的操作(图2),下垂控制从未逆变器和负载网络受非线性分析[8]。
小信号稳定性分析两个逆变器并联运行的下[9] - [12]和参考文献中的各种假设。
所呈现的稳定性结果依赖于线性约已知的操作点,两个逆变器的特殊情况下,有时会打包带无关的假设[5]。
图1微电网的示意图,与四个逆变器(节点VI)提供负载(节点VL),通过非循环互连。
之间的逆变器的虚线代表的通信链路,这将是专门用于第六部分。
在这项工作中,我们调查我们最近的理论结果同步,共享,和次级控制的微电网[13]。
经检讨后的下垂控制方法和次级控制(第二部分),我们提供必要的稳定的工作存在的充分下垂控制的逆变器和负载的网络点(第III-IV),并严格地建立控制参数导致逆变器的负载的选择和范围满足给定的驱动约束(第五节)。
在第六,我们提出了一种新的分布式二级控制器,基于拉普拉斯平均算法,快速调节网络频率标称值的。
值得注意的是,这控制器来完成此任务,同时保持电源的主要下垂控制器的共享属性。
在第七,我们提供了实验结果,验证我们的控制器设计,并终于在第VIII我们提供了一些结论和未来的发展方向。
所有结果的详细证明可以[13]。
微型电网的分布式控制回顾A.问题提出和电路理论的回顾对我们而言,微电网是一个连通的,无向的并且复杂的加权图有节点集,边集,对称的边权重对没一个边。
我们分隔节点集如,对应于负载和逆变器。
对每一个节点,我们关联一个复功率,向量电压变量对应于幅度值和谐波电压的相角偏移在AC功率流等式。
对于无耗损线路,功率流方程是如果一个数和任意的方向分配给每一边,关联矩阵定义为元素如果节点是边的汇节点,如果节点是边的源节点,其他的元素为0。
在无耗损的网络情形里,对于每个节点向量满足,存在一个边向量满足基尔霍夫电流定理。
对于没有环的网络,是唯一的并且定义为。
向量解释为节点注入,是关联的边流。
我们表示为边向量中的元素,对于与边。
和微电网文献中的标准一样,我们将逆变器建模为一个可控有电抗的电压源。
B.基本的下垂控制回顾传统的下垂控制器是基础技术主控制(同步和功率平衡)岛状微网中,并是一个启发式经典的有功/无功的解耦假设小功角和非混行情况,请参阅[1] - [3],[5],[6],[8] - [12],[16]。
对于无耗损线路,下垂方法指定在逆变器的频率和电压大小其中是额定的网络频率,是额定电压集合点对于第个逆变器,()是测得的有功(无功功率)功率的注入。
控制器增益是作为下垂系数。
从(2a),如果一个逆变器注入功率和预先决定的额定注入不同,频率将偏离。
图2逆变器并联运行的示意图C.传统的二级控制回顾去除产生的稳态频率偏差,由下垂控制器是通过所谓的“二级”积分控制器。
如果主控制器稳定网络,然后,每一个逆变器的频率具有会聚到一个恒定值,和较慢的额外控制环路然后,可以在本地使用在每个逆变器[16]。
每一个局部二级控制器逐渐更改控制增益通过直到频率偏移为0。
所测得的,此过程隐含假设局部频率是一个很好的近似稳态网络频率,并依赖于时间尺度的分离之间的快速,同步实施的主要下垂控制器和较慢的,二次积分控制器[7],[16],[17]。
对于小下垂系数,这种方法可以特别慢,导致该方法不能以动态调节网络中出现的频率一个随时间变化的负载。
此外,这些分散的(即,局部)上二级的控制器可能会功率共享属性成立由初级下垂控制器。
主控制器的稳定性结果逆变器通过下垂方法(2a)控制,由(1a)给出,常数功率负载在功率节点必须满足功率平衡关系和等式(2a)和(3)组成网络模型。
一个自然的问题出现了:在什么条件下的负载,额定功率注射,网络拓扑结构,导纳,和下垂系数的网络拥有一个稳定,同步的解决方案吗?下面的结果提供一般无环网络中确切的答案。
这个类网络包括标准的“水货”微网的拓扑结构后(图2),和大多数的配电网络孤岛事件。
为了简化描述结果,定义负载向量和额定功率注入对角矩阵的逆下垂系数,令是n维向量,其中每个元素为1。
定理3.1:(同步时间的解决方案的存在性和稳定性)考虑的频率下垂控制系统(图2a)与负载(3)。
定义不平衡功率范围为令是唯一的有功功率流的边向量,满足KCL,即。
下面的两个语句是等价的:(i)同步:有一数使得闭环系统有一个局部指数稳定和唯一的同步结果使对于全部的边都成立;(ii)流可行性:有功功率流是可行的,即和相关联唯一的通过,网络同步频率同步角度差满足对于每个边。
证明参照[13]。
要了解上述结果,请考虑以下推理。
如果一个稳定的状态存在对每一个节点,重排下垂控制器(2a)可得是稳定状态功率注入在逆变器。
因此,稳定状态节点功率注入向量,满足。
所以,满足KCL,是边之间的功率流关联向量。
在物理上,因此,参数的条件(4)指出沿每个分支的有功功率流是可行的,即,小于物理上的最大值。
此外,条件(4)下是不变的常数缩放的所有下垂系数,的整体比例和相反。
鲁棒的电压动态目前的分析基于这样的假设,乘积是一定常和知道的系数对于全部的边。
在一个现实的电力系统中,有效的行纳和电压幅值仅约已知的,并且动态地调整由额外的控制器,比如控制器(2b)。
下面的结果指出,只要这些额外控制器可调节的有效纳和节点电压超过预先设定的下限,稳定的结果定理3.1经过稍加修改。
推论4.1:(鲁棒的稳定性条件)。
考虑的频率下垂控制系统(2a)与负载(3)。
假设节点电压幅值满足对于所有的节点,边电纳大小满足。
下面的两个语句是等价的:(i)鲁棒同步:对于全部可能的电压大小和线点纳,存在一个数使得闭环系统(2a)有负载(3)有一局部指数稳定和唯一的同步情况,对全部的边有;(ii)最坏情况下流稳定性:有功功率流是可行的对最坏情况下电压的大小和线电纳,即功率共享和功率注入限制虽然定理3.1给出了充分必要条件的频率下垂控制系统的稳定性(2a)与负载(3),它没有提供直接的指导,就如何选择控制参数和满足逆变器驱动约束对于某一叫做逆变器等级。
下面的定义给出了选择适当的标准。
定义1:(比例下垂系数)下垂系数选择成比例的,如果和对于全部的。
虽然定义1中的第一条件是标准微电网文献,第二个是一个泛化的选择。
结果表明,这个比例选择理想的稳定状态功率注入。
定理5.1:(功率流约束和功率共享)考虑一个同步的情况中的频率下垂控制系统(2a)与负载(3),并让下垂系数的选择比例。
定义全部的负载。
下面的两个语句是等价的:(i)注入约束:(ii)负载约束:。
此外,逆变器共享的总负载比例根据其额定功率,即对于每个。
特别的,定理5.1中表明如果逆变器的总负载是可行的,定理5.1保证每一个逆变器满足其驱动约束。
并且,对于任何负载满足定理5.1(ii),将定理3.1中的表达和定理5.1(ii)中的边界结合起来即。
通过,可得传统的下垂系数的选择为,其中是选择为。
一种新型分布式二级控制器使用平均在定理3.1中的表达式可以看出,频率下垂方法总是导致偏差在稳定状态工作频率从额定值。
和在[13]中解释的一样,修改额定的有功功率注入通过转换(对于)在控制器(2a)得到0稳定状态频率偏差和保持电源共享,由于当。
不过,公式包括系数对全部的逆变器和负载,这些信息是不能在每一个逆变器局部得到的。
在下文中,我们追求的备选方案不隐式地依赖于频率恢复分离的时间尺度如[7],[16],[17]。
假设一个稀疏的存在之间的通信网络逆变器,扩展于传统的频率下垂设计(2a)和提出的分布式平均比例积分(DAPI)控制器其中是一辅助电源变量,是一比例系数,对每一矩阵是拉布拉斯矩阵对应于一个加权,无向连通的交互图在逆变器之间,见图1.控制结构在图3中描述。
DIAP控制器有以下三个重要的性质。
首先,控制器能够迅速调节网络频率下,快速的负载变化。
其次,控制器完成此调控,同时保留的功率共享特性主要下垂控制器(2a)(见第五部分)。
第三,交互网络在逆变器之间需要连通,不要求全部到全部的交互在逆变器之间(图1和3)。
定理6.1:(DIAP控制网络的稳定性)考虑一个无环的DIAP控制逆变器和负载网络,和(6a)-(6b)和(3)那样系数,对于,负载对于,连通的交互拉布拉斯。
以下两个语句是等价的:(i)下垂控制器的稳定性:下垂控制器的稳定相条件(4)成立;(ii)DIAP控制器的稳定性:存在一个数使得系统(3),(6a)-(6b)有一局部指数稳定和唯一的平衡点其中对于全部。
唯一的平衡点在定理3.1中给出,和对于,网络同步额定频率一起。
此外,如果下垂系数选择比例,然后DAPI控制器会保留比例主要下垂的功率共享控制器。
图3 DAPI控制器的原理结构图实验结果奥尔堡大学进行实验的DAPI控制器(6a)- (6b)中的性能进行评估。
是在图4所示的实验装置的示意图,在其中两个逆变器工作在并行供给功率到非线性负载。
图4 实验装置的示意图图5 标记实验装置图图5显示实验装置,组成为:2个 2.2kW逆变器工作在10kHz与LCL输出过滤器,1个控制板,电压和电流传感器。
1个二极管整流器作为一个非线性负载,负载是一个电容和200电阻。
电气安装和控制系统参数的详细表一。
两个逆变器的控制参数是相同的,逆变器电压通过下垂方法(2b)其中,控制。
实验结果示于图6。
图6(a)微网频率调节到其标称值由的DAPI控制器。
在第一个两秒钟的操作下下垂控制器的(2a),稳态频率偏差的存在。