反狙击手探测系统
反狙击手探测系统
反狙击手探测系统一、概述:反狙击手探测系统可分为声控测、红外探测和激光探测三种。
比较成熟的产品有法国米特拉维公司的皮勒尔MK II型狙击手探测系统、美国BBN公司研制的“枪弹定位器”声学反狙击手系统、美国AAI公司研制的PDCue 反狙击手声探测系统。
1、声探测系统反狙击手声测定位系统确定狙击手的位置,是通过接收并测量狙击步枪的膛口激波和弹丸行产生的冲击波来实现的。
通常只能探测超声速弹丸。
系统的关键部件是可以感应到爆炸并能测出爆炸声学探测器反狙击手探测系统有单兵佩挂型、固定设置型和机动平台运载型。
在一般情况下,轻武器射击时会发出两种冲击波,一种是超音速枪弹产生的冲击波,另一种是推进火药产生的枪口冲击波。
在较短距离内,通过两种冲击波的到达方向和时间就能精确判断出枪手的位置。
如果距离较远,则需要考虑枪弹的弹道和冲击波参数,例如通过冲击波产生的压力和周期可以判断枪弹的型号。
反狙击手声探测系统以是利用上述原理工作的。
2、红外狙击手探测定位仪红外反狙击手探测定位是通过探测枪口闪光不口跟踪飞行弹丸,来确定敌方狙击手的位置的系统。
3、激光狙击手探测定位仪利用敌狙击步枪上的光学瞄准镜易反射光线的原理探测敌方狙击手的装置。
该探测定位仪由红外半导体激光照明器、护眼激光测距仪、摄像机和全球定位系统组成。
工作时,首先用激光器扫描复杂的敌情方向,当激光器的光束照射到敌狙击手步枪瞄准镜时,由于其反射激光的能力比周围背景的反射能力强,因此被摄像机接收下来,将其位置叠加在场景的电视画面上,从而在狙击手射击前即可发现其位置。
声探测和红外探测反狙击手探测系统探测概率很高(一般在90%以上)、反应时间很短(一般在10秒以内),为探测射击方位、扣击敌狙击手创造了很优越的先决条件。
旦从作战效能角度讲,这仅仪足一个“亡羊补牢”之下策。
因为敌人先我攻击、占据主动,“生死劫”可能就发坐在那短短的几秒钟。
二、声探测系统定位原理狙击手声探测定位系统(如图1) 通过布置一系列声传感器,通过精确测定枪口激波和弹丸飞行激波到达每个传感器的时间差,可以精确计算出射击位置,以及弹丸飞行弹道、飞行速度和枪械口径。
声探测技术在反狙击系统中的应用
声探测技术在反狙击系统中的应用作者:吴新捷郗晓田游林儒来源:《现代电子技术》2009年第01期摘要:为了更有效地打击狙击手,降低狙击手的威胁和伤亡率,设计了狙击手声探测定位系统。
系统由4个成立体正方形的声传感器阵列、多通道声信号同步采集器和TMS320高速信号处理器及实时显示部分构成。
采用基于小波变换的广义相关时延估计方法进行时延估计,避免了信号和噪声先验知识难以获知的缺点和信号平稳性的约束,保证了空间定位的准确性。
最后经仿真验证了该方法的有效性。
关键词:声探测;反狙击;时延估计;定位算法中图分类号:TP23 文献标识码:B文章编号:1004-373X(2009)01-004-03Application of Sound Survey Technology in Counter-ambush SystemWU Xinjie,XI Xiaotian,YOU Linru(School of Automation,South China University of Technology,Guangzhou,510640,China)Abstract:To attack the sniper effectively and reduce sniper′s threat and the casualty rate,the sniper sound survey positioning system is designed.System is composed of four three-dimensional square sound sensor array,multi-channel sound signal synchronization gathering and TMS320 high speed signal processor and real-time display ing the generalized related time-delay estimation method which based on the wavelet transformation,the shortcomings are avoided which the signal and the noise apriori knowledge is difficult to gain and the signal stable restraint,it guarantees the space orientation accuracy.Finally,simulation proves the method is effective.Keywords:sound survey;counter-ambush;time-delay estimation;location algorithm0 引言对付狙击手一直以来都没有很好的技术手段,一般采用“以毒攻毒”,即以己方的狙击手对付敌方的狙击手的方式。
探测敌狙击手技术

探测敌狙击手技术姓名:董祥瑞学号:0908320101指导老师:周克栋课程:智能化单兵武器摘要:介绍了我们为什么要发展反狙击手探测技术以及目前世界上比较成熟的几种典型的“反狙击探测系统”。
这些系统或以被动方式测定射击弹道、确定狙击手位置,或以主动方式发现潜伏的狙击手。
系统按其工作机理主要划分为3类:声探测、红外探测和激光探测。
分析了这些探测系统存在的弱点和缺陷以及近期迅速发展的紫外探测技术,论述了国内外研究现状及发展趋势。
关键词:反狙击手声探测红外探测激光探测紫外探测1.军事需求狙击手在战争中的作用毋庸置疑。
他们高效率地射杀敌方人员、毁伤关键设备,迟滞敌方部队的行动.他们行踪诡秘、伪装良好、难于察觉.他们的存在往往带来恐慌,成为敌方的心腹之患。
随着狙击步枪射程、精度、威力的提高,以及高性能观瞄设备的涌现,狙击手的威胁日益增加。
在常规作战、维和、反恐等行动中,狙击手成为最主要的威胁之一,各国政府要员更是需要防范狙击手的黑枪。
因此,反狙击手已经成为各国关注的问题。
狙击手往往躲藏在建筑物内或丛林中,隐蔽的等待目标的出现。
特别是在城市环境中,狙击手可准备多出设计位置和多条逃跑路线,很容易逃脱。
因此,迅速发现并准确确定狙击手的位置,是实施反狙击手行动必须首先解决的问题。
2.国内外研究现状及发展趋势(1)美国BBN系统和技术公司开发的“枪弹定位器”声测系统、美国PALS被动声探测定位系统等声探测系统是目前广泛应用的反狙击探测系统。
(2)美国Ther motrex研究所开发了快速红外狙击手跟踪系统、休斯飞机公司研制的红外反狙击手系统等红外探测系统。
(3)以色列拉斐尔公司研发的Spotlite是一种高精度红外探测系统,能同时对多个轻武器/狙击手射击源进行远距离精确探测、识别和定位,反应迅速,探测概率高,可昼夜工作,并具有火力管理能力。
(4)目前各国装备的激光反狙击探测系统主要有法国的SLD500激光探测系统、英国EADS开发的基于激光监视技术的Ellipse反狙击手激光探测系统等。
(狙击)反狙击探测系统的发展现状及应对策略
( 狙击 ) 反狙击探测系统的发展现状及应对策略摘要:狙击的目的是可以在战场上给予对手较大的伤亡,所以都在不断的加强在反狙击方面的研究,还推出了许多不同型号不同原理的反狙击探测系统,大大提高了反狙击能力,反狙击系统可以给狙击活动带来便捷的同时也存在许多问题,我们接下来主要研究反狙击探测系统发展现状以及相应解决措施。
关键字:反狙击探测系统;现状;应对策略1.反狙击探测系统的发展现状1、声探测系统反狙击声探测系统确定狙击手位置,是通过通过对狙击步枪产生的膛口激波以及弹丸飞行产生的冲击波来实现的。
这种系统在一般作战情况下只能将超声速弹丸测量出来。
通常只能探测超声速弹丸。
系统的关键部位是可以感应到爆炸并能爆炸声学探测器。
在短距离狙击中,我们可以通过两种波到达的方向以及到达的时间进行判断,我们可以迅速得到狙击手的位置。
如果是长距离狙击的话,就需要我们对枪弹的弹道以及冲击波的参数及时作出判断,进而判断狙击手的方向。
美国一家公司开发出一个“枪弹定位器”声测系统,可以通过对弹丸在飞行中的声波进行测量并对弹丸进行分类。
这个系统的设置是固定不变的,根据保护区两边的两个传声器或者是六个单向传声器,传声器和指挥节点相连,需要我们提前确定好传声器的距离,将其精准度定位在1米以内。
2、红外线反狙击探测定位仪红外反狙击探测定位是通过探测枪口闪光跟踪飞行弹丸,从而可以确定敌方狙击手的具体位置。
美国所研制出了一种“蝰蛇”定向式红外反狙击系统,这种系统由四部分组成,分别是红外摄像机以及计算机还有惯性传感器和显示器组成。
红外摄像机需要采用CCD探测器阵列探测枪口闪光,产生的视频信号送至信号处理机,进而可以推算出狙击手的具体位置。
3、激光反狙击探测定位仪激光反狙击探测系统利用的是“猫眼效应”,猫眼在黑暗中炯炯发光,是因为猫的眼睛比身体其他部位对光的反射能力强。
同样,狙击步枪光学瞄准镜的镜片比周围环境反射能力强,在激光束的照射下会产生较强的反射光。
反侦察技术及应用

反侦察技术及应用反侦察技术是指通过各种手段来阻止敌对情报机构和间谍对我国安全的侦察和监听行为,以防止敌人获取敏感信息和数据,维护国家安全、经济安全和社会稳定。
反侦察技术在当今信息化时代具有重要意义,其应用范围涉及国防、政治、经济、科技和社会各个领域。
一、电子反侦察技术电子反侦察技术是指利用电子信息技术手段来抵抗和遏制敌对情报机构的监控和监听行为。
电子反侦察技术主要包括电子干扰技术和电子隐身技术。
1. 电子干扰技术电子干扰技术是通过对敌对情报机构的监控设备进行电磁干扰,干扰其监听和侦察设备的正常工作,达到阻止敌方侦察行为的目的。
电子干扰技术可以采用频率跳变、频谱扩展、干扰信号发射等手段,对敌方的无线电信号进行干扰和破坏,从而使敌方无法获取我方的敏感信息。
2. 电子隐身技术电子隐身技术是通过技术手段对通信设备和网络进行加密和伪装,使其不易被敌方侦察设备探测和监听,从而有效地保护我方的敏感信息和数据不被窃取。
电子隐身技术可以采用密码编码、频谱扩展、抗干扰等手段,对通信信号进行加密和隐蔽,从而在一定程度上保护通信安全。
二、光学反侦察技术光学反侦察技术是指利用光学信息技术手段抵抗和遏制敌对情报机构的监控和监听行为。
光学反侦察技术主要包括红外反侦察技术和激光反侦察技术。
1. 红外反侦察技术红外反侦察技术是利用红外传感器和探测技术来对抗敌方的红外侦察设备,通过屏蔽、干扰和掩护等手段,使敌方无法对我方的红外信号进行侦察和监听。
红外反侦察技术可以采用高温伪装、红外屏蔽、红外干扰等手段,有效地保护红外信息的安全。
2. 激光反侦察技术激光反侦察技术是利用激光传感器和激光技术手段来对抗敌方的激光侦察设备,通过干扰、对抗和反制等手段,使敌方无法对我方的激光信号进行侦察和监听。
激光反侦察技术可以采用激光干扰、激光干扰、激光对抗等手段,有效地保护激光信息的安全。
三、网络反侦察技术网络反侦察技术是指利用网络信息技术手段抵抗和遏制敌对情报机构的监控和监听行为。
猫眼效应用于激光主动探测技术的研究现状与发展趋势
激光与光电子学进展47,102802(2010)L a ser &Opt oe l e ct ro nics P rog re ss Z 20105中国激光6杂志社do i:10.3788/L OP 47.102802猫眼效应用于激光主动探测技术的研究现状与发展趋势赵延仲1 孙华燕1 宋丰华1 谷锁林2(1装备指挥技术学院,北京101416;2中国酒泉卫星发射中心,甘肃酒泉732750)摘要 基于猫眼效应的激光主动探测技术是应用于激光武器系统中的一项新型技术,其中最为关键的问题是如何准确描述被探测光学目标的猫眼效应反射特性。
介绍了几种成功应用猫眼效应的车载、便携、舰载和机载激光武器系统,综述了一些有代表意义的研究方法和结果。
最后阐述了目前猫眼效应用于激光主动探测技术存在的主要问题,并指出当前的发展趋势:多体制探测、基于猫眼效应反射光的衍射干涉特性获取光学目标特征参数、基于猫眼系统对探测激光的调制作用建立闭合回路跟踪系统、随机大气对猫眼效应反射光的影响等。
关键词 探测器;激光技术;激光主动探测;猫眼效应;反射特性中图分类号 T N 249 OC IS 280.4788140.3580 文献标识码 ARe se arch and Prospe ct of Cat -Eye Effect Use d for ActiveLase r De te ction Te chnique Zhao Yanzhong 1 Sun Huayan 1 Song Fenghua 1 Gu Suolin 21Academ y of Equ ipm ent Com m an d an d T echn ology ,Beijing 101416,Chin a 2Chin a Jiu Qu an Sa tellite La un ch Cen ter ,J iuqu an ,Ga nsu 732750,Chin aAbstract Active laser detection ba sed on cat -eye effect is a new t ype of technique used in laser weapons.The key technology is how to describe the reflection characteristics of c at -eye effect of optical targets exactly.Several vehicle -borne,portable,ship -borne and air -borne laser weapons using cat -eye effect are introduced.Representative research m ethods and results are reviewed.Finally,the existent problems of cat -eye effect used in active laser detec tion technique are presented,and the development prospects are a lso discussed including the mult-i system detection,the optic al target parameters acquiring technique based on diffraction and interference characteristics of cat -eye effect,the closed -loop ac tive trac king system based on the modulation effect of cat -eye system on the detection laser,and the effect of stochastic atmosphere on cat -eye effect reflec ted light.Key wo rds detectors;laser tec hnique;ac tive laser detection;cat -eye effec t;reflection c haracteristic s收稿日期:2010-04-12;收到修改稿日期:2010-05-12基金项目:国防预研基金(TY 7131008)和/十一五0国防预研基金(513210902)资助课题。
声源定位系统毕业设计论文
声源定位系统毕业设计论文0 前言声音是我们所获取的外界信息中非常重要的一种。
不同物体往往发出自己特有的声音,而根据物体发出的声音,人们可以判断出物体相对于自己的方位。
有些应用场合,人们需要用机器来完成声音定位这个功能,并且往往要求定位精度比较高。
2003年的美伊战争期间,人民网、CCTV网站的军事频道、国防在线等网站均报道了装配于美军的狙击手探测技术,这项技术其中一部分就包含了声源定位技术。
声源定位作为一种传统的侦察手段,近年来通过采用新技术,提高了性能,满足了现代化的需要,其主要特点是:1)不受通视条件限制。
可见光、激光和无线电侦察器材需要通视目标,在侦察器材和目标之间不能有遮蔽物,而声测系统可以侦察遮蔽物(如山,树林等)后面的声源。
2)隐蔽性强。
声测系统不受电磁波干扰也不会被无线电侧向及定位,工作隐蔽性较强。
3)不受能见度限制。
其他侦察器材受环境气候影响较大,在恶劣气候条件下工作时性能下降,甚至无法工作。
声测系统可以在夜间、阴天、雾天、和下雪天工作,具有全天候工作的特点。
以下对美军装备的报道来自于《“巴格达之战”考验英军巷战武器装备》一文,该文刊登于2003年4月8日国防在线美伊战争专题。
“狙击手声测定位系统通过接收并测量膛口激波和弹丸飞行产生的冲击波来确定狙击手的位置,通常仅能探测超音速弹丸。
这种系统有单兵佩挂型、固定设置型和机动平台运载型。
美国BBN系统和技术公司的声测系统,通过测量弹丸飞行中的声激波特性来探测弹丸并进行分类。
该系统为固定设置型,采用2个置于保护区两侧的传声器阵列或6个分布在保护区内的单向传声器。
传声器通过电缆或射频链路与指挥节点相连。
为了准确定位,需事先确定传声器的距离,精度要在1米以内。
该系统可探测到90%的射击,定位精度为方位 1.2°、水平3°。
此外,美国的“哨兵”和“安全”有效控制城区环境安全系统均是采用声测定位技术的反狙击手系统。
美军这一套声源定位系统通过定位弹丸产生的特殊激波和冲击波,探测出狙击手的位置,在战场上有效保护战士生命。
国外反狙击手光电探测技术与装备
17
中波红 外焦平 面 阵列 探 测 器探 测 枪 口闪光 ,可在 狙
击 手开枪后 70 ms内探测 到 目标 ,在 此期 间 ,超音 速
子 弹的飞行距 离不 足 50 m.系统 采用 了音频 和光 电
2种传感 器 ,可测量 狙击手 或轻 武 器发 射 源 的方 位 、
俯仰和距离 ,并把产生的视频信号传送至数字信号
第 25卷第 4期 2010年 8月
光 电技 术 应 用
ELECTR0 一O _ rIC rIEC OLOGY APPLICAT10N
Vo1.25,N o.4 August.2010
· 光 电 系 统 与设 计 ·
国外 反狙击 手光 电探 测技 术 与装 备
石 岚 ,王 宏
(东北电子技术研究所 ,辽宁 锦州 121000)
关键词 :反 狙击手 ;光 电;红外 探测 ;激光探测
中 图分 类 号 :P422
文献 标 识 码 :A
文章 编 号 :1673—1255{2010)04—0016—05
Foreign Anti-sniper Detection Technology and Equipm ent
SH I Lan,W AN G Hong (Northeast Research Institute ofElectronics Technology,Jinzhou 121000,China)
AbstraLeabharlann t:At present,anti—sniper EO detection includes two methods mainly,IR detection and laser detec— tion.Taking U .S.A.,France,Israel and Russia for exam ples,the developments of anti~ sniper IR and laser detection technology and equipment are introduced.From the advancement of EO detection materials,integra— tion of detections and Countermeasures,expansion of installation platform ,fusion of multifunction,realization of network capability ,the trends of anti—sniper EO detection technology and equipment are discussed lastly.
LAS1000

7
1. DESCRIPTION AND OPERATION 1.1 Designation
Hale Waihona Puke 1.1.1. The portable hand-held day and night ANTISNIPER device is designed for optical surveillance of terrain, detection of optical, electro-optical and light-reflecting objects (objective lenses of cameras, binoculars and riflescopes, night vision and thermal devices, geodesic poles with reflectors, etc.) and measuring the distance to them. ANTISNIPER can be used in law enforcement and anti-terrorist operations, VIP security and protection, geodesy and construction. 1.1.2. The Device contains a highly sensitive TV sensor, which performs the terrain observation. The internal display shows the observed objects, information about the Device’s operational modes, detection marks, if an optical object gets caught in the field of view, and the results of the distance measurement to the detected object. Device provides following additional capabilities - recording of video on internal SD memory card (removable) - output of video signal to external devices equipped with standard RCA connector. - operation from car power adapter (cable adapter is supplied).
反狙击探测系统的发展现状及应对策略
米 收稿 1期 :09— 1 6 3 20 1 —1 作 者 简 介 : 科 (9 8 ) 男 , 庆 人 , 殷 18 一 , 重 主要 从 事光 电探 测 技 术 研 究
殷
科 , : 狙 击探 测 系统 的发 展现 状 及应 对 策略 等 反
受到来 自电磁方面 的干扰 , 是对 于来 自狙击方 的源 干扰 但
区囹
击手无所遁形 ” 的情 况在将 来 出现的可 能性 却并 不大 , 有
矛必有盾 , 反狙击 探测 系统 给狙 击行动 带来 的 困难 , 在一 定程度上可 以由改善狙击 战术 和提 高狙击技 能来应对 . 本 文中从 目前各 国正在研究 和已经装 备 的“ 反狙击 手探测 系 统 ” 在的不足 和弱点着手 , 存 探索应对这 些“ 狙击探测 系 反 统” 的新战术和策略.
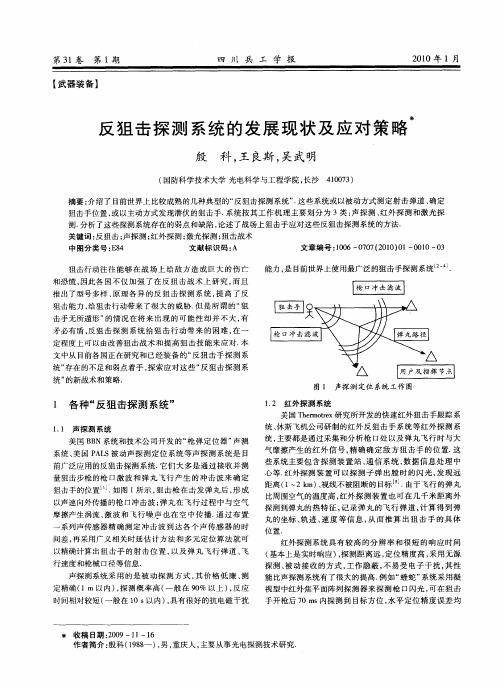
统、 休斯飞机公司研制 的红外反 狙击 手系统等红 外探测 系
统, 主要都是通过采集和分析枪 口处 以及弹丸 飞行时 与大 气摩擦产生 的红外 信号 , 确确 定敌 方狙 击手 的位 置. 精 这
系统 、 国 P L 美 A S被动声 探测定位 系统等 声探测 系统是 目 前广泛应用 的反 狙击探测 系统. 它们大 多是通 过接收并测 量狙击步枪 的枪 口激 波和 弹丸 飞行 产生 的冲 击波来 确定 狙击手的位 置… . 如图 1 所示 , 狙击 枪在击 发弹丸后 , 成 形 以声速 向外传播 的枪 口冲击 波 ; 位 系统 工 作 图 12 红 外探 测 系 统 .
1 各 种 “ 狙 击探 测 系 统 ” 反
1 1 声 探 测 系 统 . 美 国 B N 系统 和技 术公 司 开 发 的 “ 弹 定 位 器 ” 测 B 枪 声
美国Te tx h r r 研究所开发 的快速红外狙击手跟踪 系 mo e
【毕业设计-正文】声源定位系统-某某解读

0 前言声音是我们所获取的外界信息中非常重要的一种。
不同物体往往发出自己特有的声音,而根据物体发出的声音,人们可以判断出物体相对于自己的方位。
有些应用场合,人们需要用机器来完成声音定位这个功能,并且往往要求定位精度比较高。
2003年的美伊战争期间,人民网、CCTV网站的军事频道、国防在线等网站均报道了装配于美军的狙击手探测技术,这项技术其中一部分就包含了声源定位技术。
声源定位作为一种传统的侦察手段,近年来通过采用新技术,提高了性能,满足了现代化的需要,其主要特点是:1)不受通视条件限制。
可见光、激光和无线电侦察器材需要通视目标,在侦察器材和目标之间不能有遮蔽物,而声测系统可以侦察遮蔽物(如山,树林等)后面的声源。
2)隐蔽性强。
声测系统不受电磁波干扰也不会被无线电侧向及定位,工作隐蔽性较强。
3)不受能见度限制。
其他侦察器材受环境气候影响较大,在恶劣气候条件下工作时性能下降,甚至无法工作。
声测系统可以在夜间、阴天、雾天、和下雪天工作,具有全天候工作的特点。
以下对美军装备的报道来自于《“巴格达之战”考验英军巷战武器装备》一文,该文刊登于2003年4月8日国防在线美伊战争专题。
“狙击手声测定位系统通过接收并测量膛口激波和弹丸飞行产生的冲击波来确定狙击手的位置,通常仅能探测超音速弹丸。
这种系统有单兵佩挂型、固定设置型和机动平台运载型。
美国BBN系统和技术公司的声测系统,通过测量弹丸飞行中的声激波特性来探测弹丸并进行分类。
该系统为固定设置型,采用2个置于保护区两侧的传声器阵列或6个分布在保护区内的单向传声器。
传声器通过电缆或射频链路与指挥节点相连。
为了准确定位,需事先确定传声器的距离,精度要在1米以内。
该系统可探测到90%的射击,定位精度为方位 1.2°、水平3°。
此外,美国的“哨兵”和“安全”有效控制城区环境安全系统均是采用声测定位技术的反狙击手系统。
美军这一套声源定位系统通过定位弹丸产生的特殊激波和冲击波,探测出狙击手的位置,在战场上有效保护战士生命。
反狙击主动探测系统的研究
激光光源
__
.. .. ... .. .
竺
光电转换 l
狙击系统
统 由激光 测 距 仪 、 阳 S C 0 1 凌 P E 6 A单 片机 及 外 围语 音输 出电路构 成 。
J. 【. .一
调制 电路
激光测距
相敏检波 I
枪后才能发现 , 只能是一种亡羊补牢 的方法。新 这
设 计 的 系统 能 够 很 好 地 解 决 这 个 问题反 狙击 。
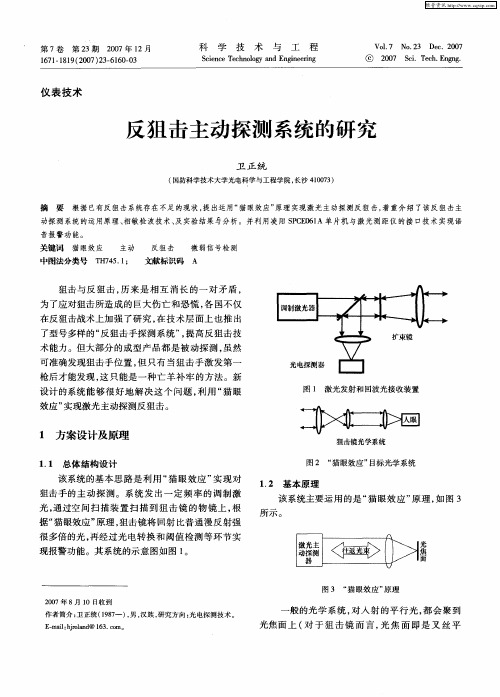
图 1 激光发射和 回波光接收装置
1 方案设计及原理
1 1 总体 结构 设计 .
狙击镜光 学系统
图 2 “ 眼效 应” 猫 目标光学系统
该 系统 的基 本 思路 是 利 用 “ 眼 效应 ” 现 对 猫 实 狙击手 的主 动 探 测 。 系 统 发 出一 定 频 率 的调 制 激 光, 通过 空 间 扫 描 装 置 扫 描 到 狙 击 镜 的 物 镜 上 , 根 据 “ 眼效应 ” 猫 原理 , 狙击镜 将 回射 比普 通 漫 反 射强 很 多倍 的光 , 再经 过 光 电转 换 和 阈值 检 测 等 环 节实 现报 警 功能 。其 系统 的示 意 图如 图 1 。
。
显 然 ,猫 眼 ”回波 功 率 远 大 于 漫 反 射 回波 功 率 , “ 因 此 我们可 以将 “ 眼 ” 射 光 与普 通 漫 反 射 光 之 间 猫 反
() 2 另外 一 个 很 重 要 的 因 素 是距 离 问 题 , 据 根 以上 的理 论推 导 , 然 不 同距 离 会 有 不 同强 度 的 回 显
1 2 基 本原 理 . 该 系统 主要 运用 的是 “ 眼效 应 ” 理 , 图 3 猫 原 如
所示 。
双通道激光主动探测系统
双通道激光主动探测系统刘秉琦;周斌;武东生;张瑜【摘要】A dual-channel active laser detection system based on an Avalanche Photo Diode(APD) and a Charge-couple Device(CCD) is designed to effectively detect weak echo signals of "cat-eye" targets and to acquire the intuitive image information of a target area. Firstly, the concept of hardware design is introduced, including the functions and constitution of some modulies and the types of primary assemblies. Then,based on the key problems of designing receiving-magnifying circuit in the APD detection mode, the circuit constitution, working principle and the selection of main parts are discussed,and the match of response spectrum for the CCD and laser is analyzed. Finally, the detection experiments are performed by using typical "cat-eye" targets at different distances. The experimental results show that the echo signal power of the typical "cat-eye" target is 2. 87 times that of mirror-like surface at a distance of 550 m in the APD mode; and the echo signal power of a telescope and that of optical window for a laser finder are 2. 72 times and 2. 31 times those of background at distances of 550 m and 2 500 m in the CCD mode,respectively. The dual-channel active laser detection system can capture the "cat-eye" targets from background and jamming targets easily, which proves the rationality and validity of the proposed system.%为了有效探测“猫眼”目标的微弱回波信号并获得目标区域的直观图像信息,设计了基于雪崩光电二极管(APD)单元探测器和电荷耦合器件(CCD)面阵探测器的双通道激光主动探测系统.介绍了硬件设计的基本思路,包括各模块功能、组成和主要部件所采用的型号.针对双通道探测模式的关键技术,阐述了APD探测模式下接收放大电路的设计方法,并分析了CCD探测模式下响应波长的匹配问题.最后,在外场条件下,利用望远镜和激光测距机等典型“猫眼”目标对该双通道激光主动探测系统进行了实验验证.实验结果表明,利用APD探测模式进行探测时,550 m距离处望远镜的回波能量响应是类镜面目标回波能量响应的2.87倍以上;利用CCD探测模式进行探测时,550 m距离处望远镜的回波能量响应和2 500 m距离处激光测距机光学窗口的回波能量响应分别是背景目标回波能量响应的2.72倍和2.31倍以上.该双通道激光主动探测系统可将典型“猫眼”目标从背景及干扰目标中清晰检出,验证了探测系统设计的合理性和有效性.【期刊名称】《光学精密工程》【年(卷),期】2012(020)002【总页数】6页(P241-246)【关键词】激光主动探测;"猫眼"效应;雪崩光电二极管(APD);电荷耦合器件(CCD);目标识别【作者】刘秉琦;周斌;武东生;张瑜【作者单位】军械工程学院光学与电子工程系,河北石家庄050003;军械工程学院光学与电子工程系,河北石家庄050003;中国人民解放军71192部队,山东文登264400;军械工程学院光学与电子工程系,河北石家庄050003;北京理工大学光电工程系,北京100081;军械工程学院光学与电子工程系,河北石家庄050003【正文语种】中文【中图分类】TN977;TN2491 引言在光学观瞄系统、光电侦察系统、光电跟踪系统、光电搜索系统、光电火控系统以及光电测距系统等绝大多数军用光电装备中,所用的光学接收镜头的焦平面都安装有反射或半反射元件(如探测器或分划板)。
GDS反狙击手系统
GDS反狙击手系统
刘东锋
【期刊名称】《现代轻武器》
【年(卷),期】2005(000)004
【摘要】当出现在华盛顿的狙击手们任意杀害在停车场的无辜者时,每个人都在
思考。
有人在推断狙击手是谁,他们的动机是什么。
还有一些人在忙于讨论抓捕犯罪分子的同伙。
但是有两个公司决定采取行动,研究一项能够确定子弹来源的技术,以帮助抓捕罪犯。
于是实时枪弹探测系统(GDS:Gunshot Detection System)诞生了。
【总页数】2页(P35-36)
【作者】刘东锋
【作者单位】无
【正文语种】中文
【中图分类】E933
【相关文献】
1.狙击手克星——反狙击机器人Packbot
2.国外反狙击手光电探测技术与装备
3.美国发展红外反狙击手系统
4.反狙击手激光装置
5.基于激光监视技术的Ellipse反狙击手系统
因版权原因,仅展示原文概要,查看原文内容请购买。
LAS1000-激光反狙击手探测器0
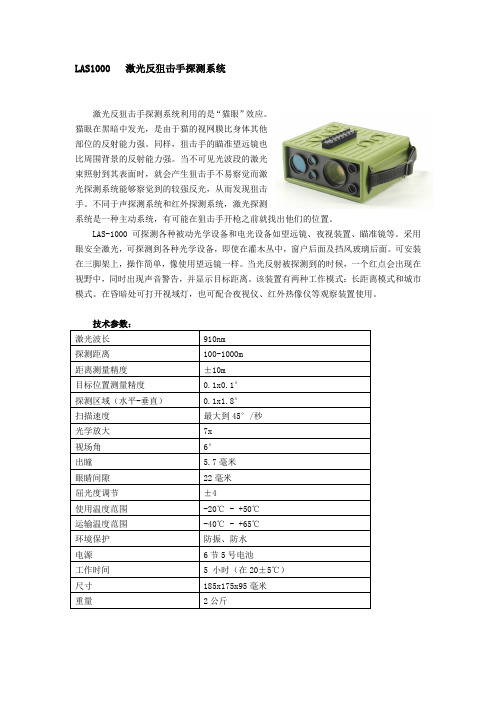
LAS1000 激光反狙击手探测系统
激光反狙击手探测系统利用的是“猫眼”效应。
猫眼在黑暗中发光,是由于猫的视网膜比身体其他
部位的反射能力强。
同样,狙击手的瞄准望远镜也
比周围背景的反射能力强。
当不可见光波段的激光
束照射到其表面时,就会产生狙击手不易察觉而激
光探测系统能够察觉到的较强反光,从而发现狙击
手。
不同于声探测系统和红外探测系统,激光探测
系统是一种主动系统,有可能在狙击手开枪之前就找出他们的位置。
LAS-1000 可探测各种被动光学设备和电光设备如望远镜、夜视装置、瞄准镜等。
采用眼安全激光,可探测到各种光学设备,即使在灌木丛中,窗户后面及挡风玻璃后面。
可安装在三脚架上,操作简单,像使用望远镜一样。
当光反射被探测到的时候,一个红点会出现在视野中,同时出现声音警告,并显示目标距离。
该装置有两种工作模式:长距离模式和城市模式。
在昏暗处可打开视域灯,也可配合夜视仪、红外热像仪等观察装置使用。
STM32声源定位 - 副本

第1章
1.
声音是人类进行信息交流和认识外界的重要手段。对声音信号的处理研究伴随着声学的研究发展而进行。在信号与信息处理、计算机、数字通信、人工智能等先进技术的推动下,声音信号处理成为当今国内外的研究热点[1]。早在20世纪七八十年代,就已经开始将麦克风阵列应用于语音信号处理的研究中,进入90年代以来,基于麦克风阵列的语音信号处理算法逐渐成为一个新的研究热点。1985年Flanagan将麦克风阵列引入到大型会议的语音增强中,并开发出很多实际产品。1987年Silverman将麦克风阵列引入到语音识别系统,1992年又将阵列信号处理用于移动环境下的语音获取,后来将其应用于说话人识别。1995年Flanagan在混响环境下用阵列信号处理对声音进行捕获。1996年Silverman和BrandstEin开始将其应用于声源定位中,用于确定和实时跟踪说话人的位置。
Finally,do a greatamount of experiment test,the experimentallresults show that the hardware performanceof this isgood,and the software localization algorithm has simple implementation,little computation and high accuracy,so it can be used in real time positioning system.
Firstly, the hardware design of the source localization system based on microphone array is been presented. Multi-channel microphone signal can be sampled at a certain sampling frequency in the same time in this design. Secondly,based on the singlechip Single-Chip microcomputer of STM32F103RBT6, standard andadvanced communication interfaces.These features make the STM32F103 line microcontroller family suitable for a wide range of applications. The critical sectionof the system software is the double step sound source location method based on time difference of arrival(TDOA).
大口径狙击武器在未来战场上的应用及发展趋势

声学探测技术是利用冲击波和枪 口爆炸声来探测狙击手。目前,大多 数声学枪击探测系统都源自业内从事 反潜艇声呐系统开发的公司,在该领 域内声学处理技术至关重要。这些声 学探测系统主要有达信公司 AAI 分公 司 的 PDCue 系 统、BBN 技 术 有 限 公 司的“回旋镖”(BOO 米 ERANG)系统、 米 etravib 公 司 的 PILAR 系 统、 奎 奈 蒂克北美公司的 EARS/SWATS 系统以 及厄尔特拉电子设备公司的步枪安装 枪击定位仪(R 米 GL)等。上述设备 一般为固定式、便携式和车辆安装式。
敌后作战中 , 常会遇到敌方大量 的设施器材 , 如油料库、弹药库、机 场设施、雷达站等。这些地方都有重 兵把守 , 而且位置隐蔽 , 在高技术兵器 受到使用条件限制的情况下 , 大口径 狙击步枪可以全天候对 1000 米距离以 上的器材设施及人员实施致命打击。
现代战争强调作战效果,强调武 器对打击目标的杀伤能力。狙击武器 在 现 代 战 场 中 具 有 非 常 重 要 的 地 位。
多种设备被国外军方装备,如“回旋镖” 系列产品,美国已采购 7000 套应用于 车辆防护。
(二)光学探测技术
光学探测技术是通过分析枪口 焰的光谱成分或利用敌方狙击枪瞄准 镜和射弹观测镜的反射来确定狙击手 的位置。目前国际上的光学反狙击探 测 系 统 有, 法 国 塞 拉 斯 公 司 的 新 型 SLD400 狙击手激光探测器,白天探测 距离 1000 米,夜晚可达 3000 米 ;以 色列拉斐尔公司推出了 SPOTLITE 狙 击手探测系统,能快速而准确的确定 敌方火力进行探测和定位,该系统主 要设计用于静态性能,最远能探测到 1000 米以外的轻武器火力。
四、 大 口 径 狙 击 武 器 发 展 趋势
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
反狙击手探测系统一、概述:反狙击手探测系统可分为声控测、红外探测和激光探测三种。
比较成熟的产品有法国米特拉维公司的皮勒尔MK II型狙击手探测系统、美国BBN公司研制的“枪弹定位器”声学反狙击手系统、美国AAI公司研制的PDCue 反狙击手声探测系统。
1、声探测系统反狙击手声测定位系统确定狙击手的位置,是通过接收并测量狙击步枪的膛口激波和弹丸行产生的冲击波来实现的。
通常只能探测超声速弹丸。
系统的关键部件是可以感应到爆炸并能测出爆炸声学探测器反狙击手探测系统有单兵佩挂型、固定设置型和机动平台运载型。
在一般情况下,轻武器射击时会发出两种冲击波,一种是超音速枪弹产生的冲击波,另一种是推进火药产生的枪口冲击波。
在较短距离内,通过两种冲击波的到达方向和时间就能精确判断出枪手的位置。
如果距离较远,则需要考虑枪弹的弹道和冲击波参数,例如通过冲击波产生的压力和周期可以判断枪弹的型号。
反狙击手声探测系统以是利用上述原理工作的。
2、红外狙击手探测定位仪红外反狙击手探测定位是通过探测枪口闪光不口跟踪飞行弹丸,来确定敌方狙击手的位置的系统。
3、激光狙击手探测定位仪利用敌狙击步枪上的光学瞄准镜易反射光线的原理探测敌方狙击手的装置。
该探测定位仪由红外半导体激光照明器、护眼激光测距仪、摄像机和全球定位系统组成。
工作时,首先用激光器扫描复杂的敌情方向,当激光器的光束照射到敌狙击手步枪瞄准镜时,由于其反射激光的能力比周围背景的反射能力强,因此被摄像机接收下来,将其位置叠加在场景的电视画面上,从而在狙击手射击前即可发现其位置。
声探测和红外探测反狙击手探测系统探测概率很高(一般在90%以上)、反应时间很短(一般在10秒以内),为探测射击方位、扣击敌狙击手创造了很优越的先决条件。
旦从作战效能角度讲,这仅仪足一个“亡羊补牢”之下策。
因为敌人先我攻击、占据主动,“生死劫”可能就发坐在那短短的几秒钟。
二、声探测系统定位原理狙击手声探测定位系统(如图1) 通过布置一系列声传感器,通过精确测定枪口激波和弹丸飞行激波到达每个传感器的时间差,可以精确计算出射击位置,以及弹丸飞行弹道、飞行速度和枪械口径。
1 系统的组成图2 为被动声定位系统的硬件部分。
系统将采集到的声信号送入数字信号处理器,通过时延估计和定位算法实现对目标的定位。
(1) 传声器是智能雷弹系统的耳朵,它通过其敏感元件把声信号转换成电信号,再经过前置精密放大电路后以电压形式输出。
其质量和性能直接影响到系统的精度和能否正确反映被测信号的全部信息。
本系统采用的是驻极体式电容传声器。
(2)因为声源的位置不同,到达接收器的信号幅度强弱不同,因此选用数控放大电路。
(3)信号采集电路的分辨率和采样率是影响时延估计精度的重要因素,因此,采集电路的设计必须采用高分辨率,高采样率的数据采集系统。
(4) DSP 是信号处理的核心,处理速度影响整个反狙击系统的反应速度,所以在成本允许的情况下,应选用处理能力越强、运算速度越快的DSP。
本系统采用TI 公司的TMS320C6711 浮点型DSP 芯片,其指令周期为617 ns。
(5)由于DSP 直接接口需要DSP 插入大量的等待周期,会导致实时显示与高速显示存在难以调和的矛盾,影响了通用方便性。
鉴于此,用一片单片机来实现显示功能,DSP 只要往外部存储器里写进数据,单片机根据读出的信息看是否显示,这样方便了编制程序以显示DSP 的运行状态,克服了上述矛盾。
(6) 由于测量精度的原因(假设目标距离为100 m ,如果测出的角度有011°的误差,则子弹击中的目标距实际声源将有0117 m 的误差) 及怕误伤到别人,因此本系统中未包含狙枪自动反击部分,而只是对目标方位进行检测和显示,人为进行反击。
2 系统定位原理及算法声探测定位技术是利用目标发出的噪声来对目标进行定位的。
如何设计性能优良、结构简单合理的声阵是被动声定位的关键技术之一。
传声器阵列可分为线阵、面阵和立体阵。
线阵结构简单,但线阵只能对阵列所在直线为界的半个平面进行定位。
面阵可以在整个平面对目标进行定位,也可以对阵列所在平面为界的半个空间进行定位。
立体阵则可以对整个空间进行定位,但其算法要复杂的多。
从实际应用角度考虑,采用立体正方形阵来进行目标定位。
立体阵声探测定位系统传声器的布置如图3 所示。
其中S 表示目标点声源, M1 , M2 , M3 和M4 分别表示4 个传声器。
采用直角坐标系表示,4 个传声器位于xoy平面上。
设基阵边长为L ,M 1 , M 3 高为h ,则传声器的坐标分别为M 1 (L/ 2 , L/ 2 , h) , M 2 ( L/ 2 , L/ 2 ,0) , M 3 (L/ 2 ,- L/ 2 , h) , M 4 ( L/ 2 , - L/ 2 ,0) 。
目标点声源的坐标为( x , y , z) 。
S 点距原点距离为r ,目标方位角为φ,仰角为θ,设声源S 到M 1 , M 2 , M 3 和M 4 的距离分别为r 1 , r 2 , r 3和r 4 。
并规定dij 表示传声器Mi 与M j 距点声源的距离差,即:在直角坐标系中,可以得到如下方程组:222222221222212122221312222141(/2)(/2)()(/2)(/2)()(/2)(/2)()()(/2)(/2)()x y z r x L y L z h r x L y L z r d x L y L z h r d x L y L z r d ⎧++=⎪-+-+-=⎪⎪++-+=+⎨⎪++++-=+⎪⎪-+++=+⎩解方程可得:31423142tan ()/()cos d d d d φθ=+-⎧⎪⎨=⎪⎩ 2222412131131412122()h d d d r d d d ++-=-- 通过对延时的计算可以得到延时距离,然后根据上面公式就可以得到狙击手的空间坐标。
三、国外反狙击手系统的进展1、声学枪击探测系统目前,大多数声学枪击探测系统都源自业内从事反潜艇声纳系统开发的公司,在该领域内声学处理技术至关重要。
这些声学枪击探测系统主要包括达信公司 AAI 分公司的 PDCue 系统、BBN 技术有限公司的“回旋镖”(BOOMERANG )系列、Metravib 公司的PILAR 系列、奎奈蒂克北美公司的 EARS/SWA TS 系列以及厄尔特拉电子设备公司的步枪安装枪击定位仪(RMGL )。
上述产品大多数都拥有固定式、便携式和车辆安装式,而体积更小、价格更低的士兵穿戴型仍在研发之中。
PDCue 系统A A I 公司的射弹探测与标记(PDCue)系统目前已经在美军中投入使用。
该系统通常都安装在装甲车辆上,由4个低轮廓的传感器阵列组成,分别安装在车辆的4个角,可以提供360°覆盖范围以及准确的方位、高低和距离计算。
据该公司称,安装在车辆上的PDCue 系统即使在探测到的信号十分微弱的情况下仍能生成清楚的走向线。
由于采用了多个传感器,减少了盲区的可能性,并增加了一定的冗余度。
由于融合了GPS 传感器,PDCue系统可以在数字地图上显示射手的位置。
另外一项可选的内容包括在PDCue系统中融合其它传感器或武器系统的视场及瞄准线,以实现快速的火力还击。
AAI 公司称,该系统具备与车辆子系统、传感器和遥控武器站之间的即插即用能力。
目前,该系统已经安装在美军的“汉姆威”和“斯特赖克”装甲车上投入战场使用,在部署到战场之前该系统还在野外和城市环境中经过了大量试验。
试验结果显示,该系统的距离测量在开阔地形中要更加准确一些。
AAI 公司公布的其它数据包括方位角误差为±1°、误报警率低于0.1%以及在收到枪击信号后反应时间小于0.1s。
“回旋镖”系列该系统使用一个桅杆安装的麦克风阵列探测来袭射弹,在美军之中深受欢迎。
PILAR 系统该系统标准的配置包括1个麦克风阵列、1个声学处理单元以及1个显示器。
在有乘员操作机枪的开放式车辆中,该系统可以指示敌方射弹来袭的方向,帮助乘员快速调转武器对准目标。
该系统可以探测中小口径弹药、火箭弹以及迫击炮弹,最远距离可达2 000m。
据帕洛迪介绍,该系统在行进间的精度通常在±5°。
它还可以用于营地防护,精确度通常在±2°PILAR 系统的工作原理是利用枪口爆炸声和子弹飞行中的冲击波。
子弹射击的声音首先到达,然后才是枪口爆炸声。
这些信号到达麦克风阵列时存在一些延迟,这就是该系统如何使用三角测量法进行定位的。
2、光学方案通过分析炮口焰的光谱成分或利用敌狙击枪瞄准镜和射弹观测镜的反射。
比如,法国塞拉斯(Cilas)公司的新型SLD 400狙击手激光探测器就是基于“猫眼”效应。
猫眼在黑暗中发光,是由于猫的视网膜比身体其它部分的反射能力强。
同样,狙击手的瞄准望远镜也比周围背景的反射能力强。
当不可见光波段的激光束照射到其表面时,就会产生狙击手不易察觉而激光探测系统能察觉到的较强反光,从而发现狙击手。
不同于声学探测系统和红外探测系统,激光探测系统是一种主动系统,有可能在狙击手开枪之前就找出它们的位置。
SLD 400 主要由三个部分组成,分别是光学传感器部分、转塔部分和遥控单元。
整套光学传感器安装在一个固定的矩形铁盒内,铁盒一侧有2个玻璃窗口。
广角编码激光束发射装置通过其中一个窗口,发射编码扫描激光束;高技术激光接收装置实际上是一种内带微光放大装置的特殊数码相机,通过另一个窗口拍摄可见光图像和接受反射回来的激光信号。
转塔部分位于传感器以下,带动光学传感器对怀疑区域进行水平和俯仰扫描。
而遥控单元由军用计算机和控制手柄组成,主要用于处理、显示传感器传来的图像;根据预定程序控制光学传感器的扫描;操纵人员通过手柄控制光学传感器的扫描。
该系统的探测距离据称在白天可达1000m,在夜间可高达3 000m。
3、其它探测系统科巴姆公司的“ 针尖”(PINPOINT)系统是一种与“回旋镖”系统类似的狙击手探测系统,它可以每30毫秒对敌方的射击进行扫描和显示。
另有厄尔特拉电子设备公司的枪击定位仪,该系统仅重4.54kg,由一个安装在球体中的声纳传感器和一个29mm ×23mm 的小型显示器组成,可以安装在步兵武器的机匣轨道上。
该系统内置了一种补偿装置,即使在步枪移动过程中仍可向用户准确提供信息,在其显示器上可以显示威胁的距离和方向。
Synectic公司的“红辣椒”系统是一种穿戴式电子信号测量方案,目前正处在研发的最后阶段。
该系统具备30Mhz~3Ghz 之间的拦截能力以及30~2Ghz之间测向能力,同时还具有22Mhz宽带凝视以及1Ghz/s扫描率等特点。
所有信息将通过一台小型P D A 或显示器呈现在用户面前。