图像匹配中特征点提取算法研究
无人机航拍中的图像处理与特征提取算法研究
无人机航拍中的图像处理与特征提取算法研究随着无人机技术的快速发展,无人机航拍技术已经成为了许多领域中的重要应用。
而在无人机航拍中,图像处理与特征提取算法则是至关重要的一环。
本文将对无人机航拍中的图像处理与特征提取算法进行研究,以期实现更精准、高效的图像处理与特征提取。
一、图像处理算法的研究1. 图像去噪算法由于无人机航拍图像受到各种环境因素的干扰,常常会伴随着图像噪声。
在图像处理过程中,去除图像噪声以提升图像的清晰度和质量是关键任务之一。
常用的图像去噪算法包括中值滤波、高斯滤波、小波滤波等。
通过研究对比这些算法的优劣,可以选择适应无人机航拍图像场景的最佳去噪算法。
2. 图像增强算法在图像处理过程中,常常需要通过增强算法来提升图像的视觉效果,使目标物体更加清晰可见。
常用的图像增强算法有直方图均衡化、对比度增强、细节增强等。
通过研究这些算法的原理和应用场景,可以实现在无人机航拍中实时进行图像增强,提升图像的可视性。
3. 图像配准算法在无人机航拍任务中,航拍过程中可能会有不同拍摄角度或视角的图像,因此需要对这些图像进行配准,以获得全景视图或三维模型。
图像配准算法可以通过特征点匹配、边缘检测等方法实现。
通过研究图像配准算法,可以提高航拍图像的准确性和一致性,从而方便后续的数据处理和分析。
二、特征提取算法的研究1. 目标检测算法在无人机航拍中,往往需要对感兴趣的目标进行检测和识别。
目标检测算法可通过基于特征的方法(如Haar特征、HOG特征)或深度学习方法(如卷积神经网络)来实现。
熟悉不同的目标检测算法,可以提高在无人机航拍中对目标的识别准确率和速度。
2. 地物分类算法在无人机航拍中,对地物进行分类是重要的任务之一,如建筑物、道路、农田等。
常用的地物分类算法包括支持向量机、随机森林、深度神经网络等。
了解和研究这些算法,可以准确地对无人机航拍图像中的地物进行分类和识别。
3. 特征点提取算法对于无人机航拍图像,特征点提取是一项重要的任务,通过提取图像中的特征点,可以用于图像匹配、3D重建等应用。
图像处理领域的SIFT算法研究

图像处理领域的SIFT算法研究一、引言随着数字图像处理技术的不断发展,图像处理已经成为计算机科学和数学领域中的热门研究领域。
其中,视觉特征提取技术是图像处理中的重要一环。
在图像处理领域中,SIFT算法是一种非常重要的特征提取算法,它能够有效地进行图像匹配和目标识别等工作,并且在计算机视觉和机器学习等领域有着广泛的应用。
二、SIFT算法概述SIFT算法是由David Lowe在1999年提出的,是一种用来检测局部不变特征的算法。
它能够在不受旋转、尺度和亮度变化的影响下,从原始图像中提取出具有局部性、尺度性和方向性等特征的关键点,从而表示图像特征。
SIFT算法在图像匹配、目标识别、三维重建等领域中有着广泛的应用。
SIFT算法主要由两个步骤组成:关键点检测和特征描述。
1. 关键点检测:关键点检测是指从图像中提取具有局部不变性、尺度不变性和方向性的关键点。
SIFT算法使用高斯差分金字塔来检测尺度不变的关键点。
首先,图像被缩放到不同的尺度,然后在每个尺度上使用高斯差分滤波器来检测关键点,最后使用非极大值抑制来排除冗余点。
这样,SIFT算法就可以检测到不同尺度下的关键点。
2. 特征描述:特征描述是指对关键点进行描述,生成具有方向性的特征向量。
SIFT算法使用方向直方图来描述关键点的方向特征。
首先,计算每个关键点周围的梯度方向和梯度幅值,然后根据梯度方向将关键点周围的像素划分到8个方向的区间中,最后生成128维的特征向量。
这样,SIFT算法就可以对图像提取出具有局部性、尺度性和方向性等特征的关键点进行描述。
三、SIFT算法的实现SIFT算法的实现主要包括图像金字塔的构建、高斯差分算法的实现、关键点检测、方向直方图的计算和特征向量的描述等步骤。
1. 图像金字塔的构建SIFT算法使用图像金字塔对图像进行多尺度处理。
图像金字塔是一种常用的图像分析方法,它通过对图像进行不同程度的缩放来实现多尺度分析。
SIFT算法使用高斯滤波器来对原始图像进行多次下采样,构建成一系列由不同尺度空间幅度调整的高斯模糊图像,从而建立起尺度空间范围内的金字塔结构,用于检测尺度不变的关键点。
点特征提取算法研究
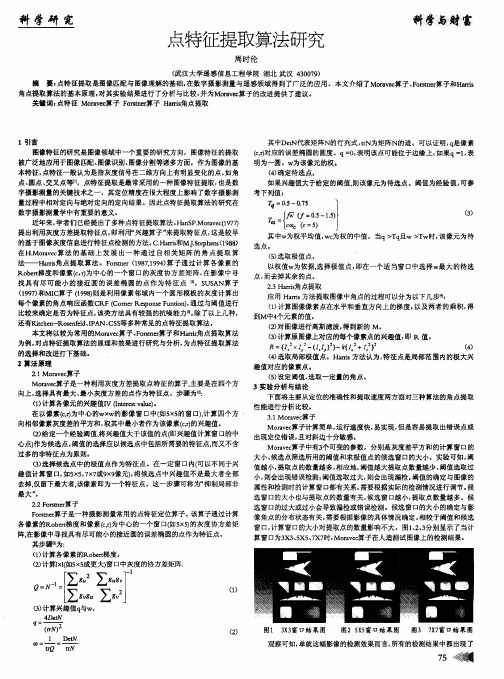
法——H a n i s 角点提取 算法 。F o m m e r( 1 9 8 7 , 1 9 9 4 ) 算子通 过计算各 像素 的 Ro b e r t 梯度 和像素( c , r ) 为 中心 的一个 窗 口的灰度协 方差矩 阵, 在影 像中寻
找具有 尽可 能小 的接近 圆的误差 椭 圆的 点作为 特征 点 1 2 1 。S U S A N算子 ( 1 9 9 7 ) 和MI C 算子 ( 1 9 9 8 )  ̄ ] 1 是利用像素邻域内一个 圆形模板 的灰度计算 出 每个像素 的角点响应函数C R . F( C o m e r R e s p o n s e F u n t i o n ) , 通过 与阈值进行 比较来确定是否为特征 点, 该类方法具有较强的抗噪能力 。 除 了以上几种 , 还有K i t c h e n — R o s e n f e l d 、 I P A N、 C S S 等多种 常见 的点特征提取算法 。 本 文将 以较 为常用 的Mo r a v e c 算子、 F o r s t n e r  ̄ 子和H a r r i s 角点提取算法 为例 , 对点特征提取算法 的原理和效果进行研究与分析, 为点特征提取算法 的选择和改进打下基础 。 2算法原理 2 . 1 Mo r a v e c 算子 Mo r a v e c 算子是一种利用灰度方差提取 点特 征的算子, 主要是在 四个方 向上 , 选择具有最大、 最 小灰度方差的点作为特征点。步骤 为l : ( 1 ) 计算各像元 的兴趣值I V( I n t e r e s t v a l u e ) 。 在 以像素( c , r ) 为中心 的wX w的影像窗 口中( 如5 x 5 的窗 口) , 计算四个方
以权值w 为依据, 选择极值 点, 即在一个适 当窗 口中选择w 最 大 点, 而去掉其余 的点。
基于SIFT算法的图像匹配研究

基于SIFT算法的图像匹配研究近年来,随着计算机视觉领域的发展,图像匹配成为一个热门的研究领域。
图像匹配是指在两个或多个图像之间找到相同或相似的内容。
在许多应用程序中,如图像检索、物体识别、拼接和增强,图像匹配是一个至关重要的问题。
其中,SIFT算法是一种流行的技术,它已被广泛应用于图像拼接、物体识别等各种领域。
SIFT算法是由David Lowe于1999年提出的一种图像特征提取算法。
它的主要思想是通过从图像中提取出具有唯一性和不变性的特征点,来进行图像匹配。
在提取特征点时,SIFT算法涉及到多个步骤,如高斯差分金字塔和尺度空间极值点检测。
特征点提取完成后,SIFT算法使用局部图像描述符来描述这些特征点,这些描述符对图像旋转、尺度和亮度变化具有不变性。
在使用SIFT算法进行图像匹配时,首先需要在两个图像中提取特征点。
然后,通过匹配这些特征点来计算它们之间的相似性。
如果特征点的相似性得分高于阈值,则认为它们是匹配的。
在实践中,SIFT算法虽然非常流行,但也存在一些缺点。
由于SIFT算法需要计算复杂的高斯差分金字塔和尺度空间极值点检测,因此它的计算复杂度非常高。
此外,SIFT算法对于光照变化和旋转变换比较敏感,这会导致匹配结果的不准确。
为了克服这些缺点,研究人员提出了一些改进的SIFT算法。
例如,SURF算法使用快速的Hessian矩阵检测技术代替了SIFT算法中的高斯卷积和Laplacian检测。
这使得SURF算法具有更快的计算速度和更高的稳定性。
此外,ORB算法使用快速响应二进制特征来代替SIFT算法中的变量高斯模板和Haar小波变换。
这使得ORB算法在特征提取和匹配方面更加高效和准确。
除了SIFT算法,还有许多其他的图像特征提取算法,如SURF、ORB、FAST、BRIEF等。
每种算法都有其优缺点,研究人员需要在不同应用场景下选择最适合的算法。
总之,基于SIFT算法的图像匹配研究在计算机视觉领域发挥了重要作用。
图像特征点提取及匹配算法研究论文
图像特征点提取及匹配算法研究论文1.SIFT算法:SIFT(Scale-Invariant Feature Transform)算法是一种经典的图像特征点提取算法。
该算法首先使用高斯滤波器对图像进行多尺度的平滑处理,然后使用差分算子来检测图像中的关键点,最后计算关键点的主方向和描述符。
SIFT算法具有尺度不变性和旋转不变性,对于图像中存在较大尺度和角度变化的情况下仍能提取出稳定的特征点。
2.SURF算法:SURF(Speeded Up Robust Features)算法是一种快速的特征点提取算法,它在SIFT算法的基础上进行了优化。
SURF算法使用Haar小波响应来检测图像中的特征点,并使用积分图像来加速计算过程。
此外,SURF算法还使用了一种基于方向直方图的特征描述方法,能够提取出具有旋转不变性和尺度不变性的特征点。
3.ORB算法:ORB(Oriented FAST and Rotated BRIEF)算法是一种快速的特征点提取和匹配算法。
该算法结合了FAST角点检测算法和BRIEF描述符算法,并对其进行了改进。
ORB算法利用灰度值的转折点来检测图像中的角点,并使用二进制字符串来描述关键点,以提高特征点的匹配速度。
ORB算法具有较快的计算速度和较高的匹配精度,适用于实时应用。
4.BRISK算法:BRISK(Binary Robust Invariant Scalable Keypoints)算法是一种基于二进制描述符的特征点提取和匹配算法。
该算法首先使用田字形格点采样方法检测关键点,然后使用直方图来描述关键点的方向和纹理特征。
最后,BRISK算法使用二进制字符串来表示关键点的描述符,并使用汉明距离来进行特征点的匹配。
BRISK算法具有较快的计算速度和较高的鲁棒性,适用于大规模图像匹配任务。
总结起来,图像特征点提取及匹配算法是计算机视觉领域中的重要研究方向。
本文介绍了一些常用的特征点提取及匹配算法,并对其进行了讨论。
特征 图像匹配算法

特征图像匹配算法1. 简介特征图像匹配算法是一种计算机视觉中常用的算法,用于在两幅图像之间找到相对应的特征点,并将它们匹配起来。
这种算法在多个应用领域都有广泛的应用,包括图像检索、三维重建、目标跟踪等。
特征图像匹配算法的核心思想是通过提取图像中的关键特征点,然后计算这些特征点的描述子,在不同图像中进行匹配,找到相对应的特征点。
这些特征点通常是图像中的角点、边缘或者纹理等具有区分性的部分。
2. 特征提取在特征图像匹配算法中,特征点的提取是首要任务。
常用的特征点提取算法包括Harris角点检测、SIFT(Scale-Invariant Feature Transform)、SURF (Speeded-Up Robust Features)等。
•Harris角点检测是一种通过计算图像中像素点周围的灰度变化来检测图像中的角点的算法。
它主要是通过计算图像中每个像素点的窗口内的像素梯度的方差来确定是否为角点。
•SIFT是一种尺度不变特征变换的算法,它可以在不同大小和旋转角度的图像中匹配特征点。
SIFT算法首先通过高斯滤波器进行图像平滑,然后通过DoG(Difference of Gaussians)算子检测图像中的极值点作为特征点。
•SURF是一种类似于SIFT的特征提取算法,但它具有更快的计算速度和更好的旋转不变性。
SURF算法通过检测图像中的极值点,并计算它们的Haar小波特征来提取特征点。
3. 特征描述在特征提取之后,需要对特征点进行描述,以便在不同图像中进行匹配。
常用的特征描述算法包括ORB(Oriented FAST and Rotated BRIEF)、BRISK(Binary Robust Invariant Scalable Keypoints)等。
•ORB是一种具有旋转不变性和尺度不变性的特征描述算法。
它通过计算特征点周围的像素点在不同方向上的灰度变化来生成特征点的描述子。
最后,ORB算法将描述子通过二进制编码,以降低计算复杂度。
基于特征点的图像匹配技术研究与应用
基于特征点的图像匹配技术研究与应用图像匹配是计算机视觉领域的重要研究方向,它广泛应用于图像检索、目标跟踪、三维重建等领域。
基于特征点的图像匹配技术是其中一种常用的方法,其通过提取图像中的特征点,再根据特征点的描述子来进行匹配,从而实现图像间的对应关系。
特征点是图像中显著的、具有鲁棒性的点,其通常具有旋转、尺度、光照等变化不变性。
常见的特征点提取算法有Harris、SIFT、SURF等。
这些算法通过计算图像中各个像素点的角度、梯度等信息,找出具有显著性的特征点。
特征点的描述子是对特征点周围区域的图像信息进行编码的向量,以便于进行匹配。
描述子一般具有维度较高、局部性质强、鲁棒性好等特点。
常见的特征点描述子算法有SIFT、SURF、ORB等。
这些算法通过在特征点周围区域内计算梯度、方向直方图、二进制值等信息,生成特征点的描述子。
在特征点提取方面,Harris算法是一种常见的兴趣点检测算法,它通过计算图像中各个像素点的角度、梯度信息,找出具有显著性的兴趣点。
SIFT算法是一种常用的尺度不变特征点提取算法,它通过在不同尺度空间上检测极值点,并通过高斯差分金字塔来提取稳定的兴趣点。
SURF算法是一种加速SIFT算法的方法,通过使用快速积分图像来计算特征点的梯度和方向直方图。
在特征点匹配方面,由于两幅图像之间可能存在旋转、尺度、光照等变换,因此需要寻找具有一致性的特征点。
最常用的方法是基于描述子的相似度度量,如计算两个特征点的欧氏距离或汉明距离。
另外,还可以使用RANSAC算法进行鲁棒的特征点匹配,通过随机选择一组特征点对,计算模型的拟合程度,筛选出符合模型的特征点对。
基于特征点的图像匹配技术在很多领域都有广泛的应用。
在图像检索方面,可以根据用户输入的特征点来相似的图像。
在目标跟踪方面,可以通过匹配图像中的特征点来实现目标的追踪。
在三维重建方面,可以通过匹配多幅图像中的特征点来恢复场景的三维结构。
总之,基于特征点的图像匹配技术是一种重要的图像处理方法,通过提取图像中的特征点,并通过特征点的描述子来进行匹配,可以实现图像之间的对应关系,广泛应用于图像检索、目标跟踪、三维重建等领域。
图像处理中的特征提取和匹配算法
图像处理中的特征提取和匹配算法图像处理在日益热门的人工智能技术中扮演着一种重要的角色。
在图像处理中,特征提取和匹配算法是两个至关重要的步骤。
特征提取是通过分析图像的局部特点来创建描述图像内容的向量,而匹配是将不同图像的特征或特征向量进行比较,以确定它们是否相似。
本文将介绍几种常用的特征提取和匹配算法。
一、特征提取算法1.尺度不变特征变换(SIFT)SIFT是一种特征提取算法,它能够从不同的尺度和方向上提取图像的局部特征。
这种算法在检索和匹配图像中特别有用。
SIFT算法的基本思想是通过高斯差分算子得到一组尺度空间图像,通过高斯图像之间的差异来确定关键点,然后计算每个关键点的局部梯度的幅值和方向,最后形成一个基于梯度方向的特征描述符。
2.速度增强型稀疏编码(SLEEC)SLEEC是一种新型的高效特征提取算法。
与其他算法不同的是,SLEEC只需扫描一次训练数据即可获得最具代表性的特征。
该算法通过运用具有多个分辨率的降采样、随机稀疏和加速度分析三种技术提取特征,从而实现了比其他算法更高的准确性和速度。
二、特征匹配算法1.暴力匹配算法暴力匹配算法是一种基本的匹配算法,它实现了图像特征之间的精确匹配。
该算法通过比较两个图像之间的每个可能的匹配,来确定匹配的好坏。
虽然该算法的准确性很高,但是它非常耗时,因此只适用于小图像匹配。
2.基于Flann树的匹配算法基于Flann树的匹配算法通过对特征向量进行一系列分割和聚类,以快速找到大量数据中的相似匹配。
该算法不仅适用于大规模数据集,而且具有高效和稳定性。
3.随机抽样一致性算法(RANSAC)随机抽样一致性算法是一种常见的特征匹配算法。
该算法通过随机采样一对点来确定匹配,在这个过程中,通过迭代重复采样和检测结果,不断提高匹配模型的准确度。
结论:在图像处理和计算机视觉中,特征提取和匹配是核心算法。
不同的特征提取和匹配算法适用于不同的应用场合。
在实际应用中,为了达到对图像的快速识别和匹配,我们需要根据具体的需求,选择合适的特征提取和匹配算法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
、原始依据1.工作基础特征点是数字图像中重要的几何特征,特征点的准确提取对于图像处理和图像测量具有重要意义。
Harris算子是C. Harris和J. Stephens在1988年提出的一种基于信号的点特征提取算子。
Harris角点检测算法是一种非常经典的提取算法,这种算子受信号处理中自相关函数的启发。
给出与自相关函数相联系的矩阵M。
M阵的特征值是自相关函数的一阶曲率,如果两个曲率值都高,则认为该点是特征点。
Harris算法具有计算简单、提取的角点特征均匀合理、可以定量提取特征点以及算子稳定的特点。
2•研究条件系统的开发已经具备的外界条件是具有藏书丰富的天津大学仁爱学院图书馆,并且随时可以得到指导老师的辅导和指点,系统开发所使用的电脑已经介入In ternet,能方便的在外网上进行查阅资料。
开发环境是普通个人计算机,软件支持是Windows 系列的操作系统。
3•应用环境论文在解决图像特征点的提取问题上积极应用并改进Harris算法,并运用多个不同类型的图像实验比较算法的优缺点。
4.工作目的掌握使用Harris算法提取图像特征点的方法以及Harris算法的原理。
考证不同类型图像使用Harris算法提取图像特征点的优劣。
二、参考文献修改同开题[1]陈利军.图像角点检测和匹配算法的研究[D].西安:西安电子科技大学,2005. 163—168.[2]李兰友,王学彬.Visual C#图像处理程序设计实例[M].北京:北京国防工业出版社,2003. 88—102.[3]李玲玲,李印清.图像配准中角点检测算法的研究与比较[J].郑州:郑州航空工业管理学院学报(社会科学版),2006, 25(2): 190—192.[4]W ANG Wei ,TANG Yi-ping. Image Corner Detection Technique Research on Machine Vision[R] . Beijing :National Natural Scienee Foundation of China 2006. 46—58.⑸Kitchen L,Rosenfeld A. Gray -Level Corner Detection[J]. Netherlands: Pattern Recog ni tion Letters,1982,13(2):163—175.[6]Moravia HP . Towards Automatic Visual Obstacle Avoidance[C]. Proceedings ofInternational Joint Conference on Artificial Intelligenee, Cambridge, MA . USA:1977. 10—12.[7]Smith S M. Brady M. SUSAN-a New Approach to Low Level Image Processi ng[J] .In ternatio nal Journal of Computer Version 1997, 23(1): 45—78.[8]王展,皇普堪,万建伟.基于多尺度小波变换的二维图像角点检测技术[J].北京: 国防科技大学学报,1999, 8(3): 122—125.[9]杨莉,初秀琴,李玉山.最小亮度变化角点自适应检测算法研究[J].西安:西安电子科技大学学报.2003, 30(4): 530—533.[10]陈白帆,蔡自兴.基于尺度空间理论的Harris角点检测[J].中南大学学报(自然科学版),2005, 15(3): 187—192.三、设计(研究)内容和要求1 .设计内容利用Harris算法提取图像特征点,对比其他经典算法具体体现该算法的优越性,在角点检测系统中,基于图像匹配从参数对角点检测的影响、算法运行时间、识别角点数目以及算子的抗噪能力等几个方面对Harris角点检测算法和其他经典算法进行对比实验,然后分别作了对应的分析。
经过实验分析得出Harris算子是用于图像匹配最适合的角点检测算法。
2.主要指标与技术参数做出Harris算法与另外两种经典算法的对比试验,通过实现深入研究该算法。
3.具体要求主要对Harris算法进行理论分析,并且基于C #实现这种算子的角点检测系统。
同时对比分析SUSAN和MIC这另外两种经典算法来进一步研究Harris算法的优越性。
指导教师(签字)年月日审题小组组长(签字)年月日天津大学仁爱学院本科生毕业设计(论文)开题报告、课题的来源与意义出版社,2003. 88—102.[3]李玲玲,李印清.图像配准中角点检测算法的研究与比较[J].郑州:郑州航空工业管理学院学报(社会科学版),2006, 25(2): 190—192.[4]WANG Wei , TANG Yi-ping. Image Corner Detection Technique Research onMachine Vision[R] . Beijing : National Natural Scienee Foundation of China 2006. 46—58.⑸Kitchen L , Rosenfeld A. Gray -Level Corner Detection[J]. Netherlands:Pattern Recog ni tion Letters 1982, 13(2): 163—175.[6]Moravia HP . Towards Automatic Visual Obstacle Avoidance[C]. Proceedings ofInternational Joint Conference on Artificial Intelligenee, Cambridge, MA . USA: 1977. 10—12. [7]Smith S M. Brady M. SUSAN-a New Approach to Low Level Image Processi ng[J] .In ternatio nal Journal of Computer Version, 1997, 23(1): 45—78.[8]王展,皇普堪,万建伟.基于多尺度小波变换的二维图像角点检测技术[J].北京:国防科技大学学报,1999, 8(3): 122—125.[9]杨莉,初秀琴,李玉山.最小亮度变化角点自适应检测算法研究[J].西安:西安电子科技大学学报.2003, 30(4): 530—533.[10]陈白帆,蔡自兴.基于尺度空间理论的Harris角点检测[J].长沙:中南大学学报(自然科学版),2005, 15(3): 187—192.选题是否合适:是口否口课题能否实现:能口不能口指导教师(签字)年月日选题是否合适:是口否口课题能否实现:能口不能口审题小组组长(签字)年月日图像匹配中特征点提取算法研究摘要图像匹配广泛应用于计算机视觉、目标识别、医学图像处理、遥感等领域。
特征点的选择是基于点特征匹配算法的一个关键步骤,是机器视觉的关键技术之一。
在所有的特征点检测方法的研究中,以角点检测方法的研究最受关注。
文章对图像匹配中角点检测算法的理论进行了回顾以及总结,主要对Harris, SUSAN,MIC三种经典算法进行了理论分析,并且基于C#实现了这三种算子组成的角点检测系统。
本文的重点内容是在角点检测系统中,基于图像匹配从参数对角点检测的影响、算法运行时间、识别角点数目以及算子的抗噪能力等几个方面对三种经典的角点检测算法进行对比实验,然后分别作了对应的分析。
经过实验分析得出Harris算子是用于图像匹配最适合的角点检测算法。
关键词:角点检测;Harris;SUSAN; MICFeature-points Extractio n AlgorithmResearch in Image Match ingAbstract: Image match ing is widely used in computer visio n, target ide ntificatio n, medical image disposal,remote sensing etc..Selecting the feature-points is a key step in image matchi ng based on point ' s feature,a nd it is one of the key tech niq ues in mach ine visi on. The research of corner detect ion abta ins the furthest atte nti on in all detecti on methods to the feature-poi nts.This paper attempts to review and summarize the theoreticses of the corner detect ion methods in image matchi ng,ma in ly an alyses the theories of the 3 classical corner detect ion algorithms,Harris,SUSAN and MIC.A corner detect ing system which is based on the C# is complete.A nd the system is composed with the above 3 classical corner detect ion algorithms.The paper ' s primary content is that taking contrastive experiments about the 3 classical corner detection algorithms in some aspects,such as the parameter effect to the ' s corner detecti on ,the run time of the arithmetic,the nu mber of recog ni sed corners and the ability of an ti-no ise and so on based on image matchi ng in this system,a nd the n respectively make corresp onding an alyses.The result shows that the Harris arithmetic is the best appropriate corner detect ion algorithm in image matchi ng.Key words: corner detection, Harris, SUSAN, MIC第1章绪论 (1)1.1课题背景介绍 (1)1.2计算机视觉及图像匹配概述 (1)1.3 角点检测的研究现状 (2)1.4本论文研究内容和章节安排 (3)第2章二维图像特征点提取技术 (4)2.1特征点的定义分类及角点的引出 (4)2.1.1特征点的定义及分类 (4)2.1.2角点的引出 (4)2.2二维图像角点检测 (5)2.2.1二维图像角点检测准则 (5)2.2.2二维图像角点检测技术 (5)第3章经典角点检测算法 (7)3.1Harris角点检测算法 (7)3.2SUSAN角点检测算法 (11)3.3MIC角点检测算法 (13)第4章系统实现 (16)4.1开发环境及语言 (16)4.2系统框架及算法实现 (16)4.2.1系统框架 (16)4.2.2算法实现 (17)4.2.3流程图 (19)4.3部分功能代码 (23)第5章基于系统的三种检测算法的实验 (25)5.1检测图像的选择 (25)5.2参数对算法的影响 (26)5.2.1 参数的经典范围 (26)522不同参数下的实验 (27)523参数对角点提取的影响 (28)5.3执行时间及角点数目检测实验 (31)5.3.1相关实验 (31)5.3.2实验结果分析 (33)5.4各种算子的抗噪性 (35)5.4.1相关实验 (35)5.4.2实验结果分析 (36)5.5 算法的比较及分析 (36)结论 (38)致谢 (40)参考文献 (39)第1章绪论1.1课题背景介绍机器视觉被广泛应用于工业自动化生产,宇航航空,医学图像分析,机器人自动导航,交通安全以及国防。