一种基于改进的粒子群优化算法的神经网络PID控制器
基于粒子群算法的PID控制器优化设计
基于粒子群算法的PID控制器优化设计1.引言PID控制器是工业应用中最常用的一种控制器,其可以根据系统的误差来产生控制信号,从而达到稳定、快速、精确控制系统的目的。
然而,传统的PID控制器存在参数调节不便、系统抗干扰性差等问题。
为了解决这些问题,本文采用粒子群算法优化PID控制器参数,提高系统的控制性能。
2.粒子群算法粒子群算法是一种基于群体智能的优化算法,模拟了鸟群、鱼群等动物群体的行为,并将其应用于参数优化等问题中。
算法的核心思想是通过不断地更新最优粒子位置和最优位置,从而逐步优化目标函数。
3.PID控制器模型PID控制器包括比例、积分和微分三个环节,其控制信号的计算公式为:u(t) = Kp * e(t) + Ki * ∫e(t)dt + Kd * de(t)/dt,其中e(t)为系统的误差,Kp、Ki、Kd为比例、积分和微分增益。
4.粒子群算法优化设计粒子群算法的核心是粒子的个体速度和位置更新,根据目标函数的相对大小来调整更新的方向和距离,从而找到更优的解。
在PID控制器的优化设计中,可以将粒子视为PID控制器的参数向量,即粒子的位置表示PID参数。
4.1适应度函数设计适应度函数是粒子群算法优化的关键,其评价了每一个粒子的好坏。
在PID控制器的优化设计中,可以选择系统的稳态误差、超调量、响应时间等指标作为适应度函数。
4.2粒子的速度和位置更新粒子的速度和位置更新公式如下:v(i+1) = w * v(i) + c1 * rand( * (pbest(i) - x(i)) + c2 * rand( * (gbest - x(i))x(i+1)=x(i)+v(i+1)其中,v(i)为第i代粒子的速度,x(i)为第i代粒子的位置,w为惯性权重,c1和c2为加速因子,rand(为随机数函数,pbest(i)为第i代个体的历史最优位置,gbest为全局最优位置。
4.3粒子群算法的优化过程根据上述速度和位置更新公式,可以得到粒子群算法的优化过程:1)初始化种群:随机初始化粒子的位置和速度。
基于改进粒子群算法的PID控制器参数整定的开题报告
基于改进粒子群算法的PID控制器参数整定的开题报告一、研究背景和意义PID控制器是目前最为普遍使用的一种自动控制器,具有简单易实现、计算量小、稳定性强等优势,因而被广泛应用于工业自动化、机器人控制、电力电子等领域中。
PID控制器的参数整定问题一直是自动控制领域中的研究热点,合理的参数设置可以在一定程度上保证控制系统的稳定性、响应速度以及鲁棒性,但参数调整通常需要在实际系统中反复试验,耗时耗力,且难以保证全局最优。
因此,如何寻求一种更为高效准确的PID控制器参数整定方法具有重要意义。
粒子群算法(Particle Swarm Optimization, PSO)是一种基于群体智能优化的算法,由于其收敛速度快、易于实现等特点,被广泛应用于微粒群聚、机器学习、图像处理等领域。
目前,PSO已被用于PID控制器参数整定问题的研究,取得了一定的成果。
但是传统的PSO算法仍存在收敛速度慢、易陷入局部最优等问题,如何改进PSO算法,提高其适用性和精度,成为当前研究的热点问题。
二、研究内容本文将结合PSO及PID控制器参数整定,在研究经典控制理论的基础上,着重探讨改进粒子群算法在PID控制器参数整定中的应用。
研究目标主要包括以下三个方面:(1)综述PID控制器的基本原理及参数整定方法,总结现有粒子群算法在PID参数调整中的应用现状及存在问题。
(2)改进粒子群算法,从算法初始化和选择邻域等方面入手,加快PSO的收敛速度且降低陷入局部最优的概率。
同时还将对PSO算法的参数设置进行优化,以达到更好的精度和稳定性。
(3)通过仿真实验,在MATLAB等工具下对本文所提出改进方法的实际效果进行评估分析,与传统PSO算法以及其他PID控制参数整定方法进行比较,考虑参数优化后的改进PSO算法是否可以更好地解决PID控制器参数整定问题。
三、研究方法本文主要采用以下几种研究方法:(1)文献综述法:对PID控制基本原理、调整方法以及经典PSO算法等进行理论总结和分析,明确本文研究的问题和难点。
基于粒子群算法的PID控制器优化设计

基于粒子群算法的PID控制器优化设计PID控制器是一种经典的控制器,适用于很多控制问题。
它由比例(P)、积分(I)和微分(D)三个环节构成,可以根据系统的反馈误差进行相应的调节,并实现系统的稳定控制。
然而,传统的PID控制器设计可能无法达到最优性能,因此可以采用PSO算法来优化PID控制器的参数。
PSO算法的基本思想是通过模拟粒子在空间中的移动,根据个体经验和群体信息不断调整位置,从而找到最优解。
具体步骤如下:1.初始化粒子的位置和速度。
粒子的位置表示PID控制器参数,速度表示参数的变化量。
2.根据当前位置计算适应度函数值,即系统的控制误差。
适应度函数值越小,表示当前位置越优。
3.选择个体历史最优位置和群体历史最优位置。
4.更新粒子速度和位置。
根据个体历史最优位置和群体历史最优位置进行速度更新,从而改变下一步的方向。
5.判断是否达到终止条件。
例如,达到最大迭代次数或达到目标误差范围。
6.如果未达到终止条件,则返回步骤3继续迭代;否则,输出最优解。
通过PSO算法优化PID控制器的参数,可以使系统的控制性能得到提升。
在优化过程中,粒子群算法利用了个体和群体的经验,具有较好的全局能力和收敛性,能够找到较优的PID控制器参数。
相比于传统的试错调参方法,PSO算法更加高效、自动化,可在较短的时间内得到较优的解。
需要注意的是,PSO算法的性能可能受到一些因素的影响,如粒子数量、惯性权重、学习因子等。
为了获得更好的优化效果,可以通过参数调节、改进算法等方式进行优化。
总之,基于粒子群算法的PID控制器优化设计能够帮助改进传统PID 控制器的性能,提高系统的稳定性和控制精度。
这种方法具有广泛的应用前景,可在各个领域的控制问题中发挥作用。
基于改进粒子群优化算法的分数阶PID控制器
DCWTechnology Analysis技术分析75数字通信世界2024.03随着近年来科技的不断进步,工业和医疗对科技的要求也越来越高。
在20世纪90年代Pod lubny 提出,将传统PID 控制器引入微分阶次μ和积分阶次λ,增加了FOPID 控制器的控制范围[1-2],控制精度大大提高,在被控对象的控制过程中也可以更加灵活地操作。
相比于传统PID 控制器,FOPID 控制器增加了两个参数,在参数整定方面,FOPID 控制器变得更加复杂。
传统控制中采用整数阶PID 控制器是因为缺少求解分数阶微分方程的数学工具,FOPID 控制器虽然可以解决许多复杂难题,但是参数整定的问题如果不能得到有效解决依然不能得到广泛推广,于是参数整定的问题成为分数阶PID 控制的研究热点。
相比于常见的频域幅值裕量法和主导极点法,采用优化方法可以缩减很多工作量。
优化方法最重要的一环就是获得优化参数,在控制系统的控制过程中正是借用这些参数提升系统性能的,利用粒子群(Particle SwarmOptimization ,PSO )优化算法是当下获取参数运用比较广泛的新型算法。
1 分数阶微积分及分数阶PID控制器1.1 分数阶微积分整数阶微积分通过延伸的方式推出分数阶微积分,只要不是整数阶次的微积分就可以被定义成分数阶微积分。
若想实现多种阶次的微积分也需要依靠分数阶微积分,分数阶微积分的算子能在整数阶微积分算子的基础上拓展得到,表达式如下:(1)式中,为分数阶微积分算子;下限中积分或微分用a 表示;上限中积分或微分用t 表示;阶次用表示。
下面四个公式是分数阶微积分中使用最多的定义。
基于改进粒子群优化算法的分数阶PID控制器李小松,孙志敏(太原科技大学电子信息工程学院,山西 太原 030024)摘要:针对控制系统控制性能不稳定的问题,实践中可在控制系统里设定一种分数阶PID控制器。
相比于整数阶PID控制器,分数阶PID控制器增加了λ和μ两个控制参数,这样可以让控制器在控制过程中拥有更好的性能,但同时也使得参数整定使用更加困难。
基于粒子群优化算法的PID控制器参数整定_陈俊风
收稿日期:2005-06-25第23卷 第08期计 算 机 仿 真2006年08月文章编号:1006-9348(2006)08-0158-03基于粒子群优化算法的PI D 控制器参数整定陈俊风,范新南,苏丽媛(河海大学计算机及信息工程学院,江苏常州213022)摘要:PI D 控制器的性能完全依赖于其参数的整定和优化,但参数的整定及在线自适应调整对常规的P I D 控制器是难以解决的问题。
根据粒子群算法具有对整个参数空间进行高效并行搜索的特点,提出了一种基于粒子群优化算法整定PI D 控制器参数的设计方法,并定义了一种新的性能指标函数来评价P I D 控制器的性能。
现以二阶的船舶控制装置为研究对象,运用粒子群优化方法对P I D 控制器参数进行了寻优研究。
仿真结果表明,该方法比一般PI D 参数整定方法具有更好的控制性能指标,有着一定的工程应用价值。
关键词:粒子群优化算法;控制;参数整定中图分类号:TP273.2 文献标识码:ASelf-tun i ng of PID Para m eters B ased on Partic le S w ar m O pti m iza tionCHEN Jun -feng ,FAN X in -nan ,S U L i-yuan(C o llege o f Com pu ter &In form ation Eng i neer i ng ,H oha iU n iv .,Chang zhou Jiang su 213022,Ch ina)AB STRACT :T he pe rfo r m ance o f P I D con tro ll e r comp letely depends on t he pa ra m e ter tun i ng and opt i m izat i on ,w h i ch are difficult prob lem s for genera l P ID contro ller .Ba sed on the charac ter istic of pa rticle s w ar m op ti m iza ti on(PSO )a lgo rithm wh ich sea rches the param ete r space concurrently and effic i ent l y ,a nove l de si gn m e t hod for de ter m in i ng the opt i m a l P I D contro ller pa ram eters usi ng the partic le s w ar m opti m iza tion (PSO )algo rit hm is presented i n th is pape r .A new per for m ance cr iter i on function is a lso de fi ned to esti m ate t he per form ance o f the P ID contro ller .U s i ng the se cond -o rder sh i p contro l sy ste m a s study ing ob ject ,PSO algo rit hm is used to sea rch opti m a l param ete r of P ID contro ller .T he si mu lation results i ndica te that the contro l per form ance o f the P I D based on PSO is bette r than that of the genera l P I D pa ram eters tun ing m e thods and posse sses ce rta i n eng i nee ring va l ue .K EY W ORDS :P artic le s w a r m opti m iza tion(PSO );Con tro;l Pa ram eter tun i ng1 引言P ID 控制技术是最早发展起来的控制策略之一,由于其算法简单、鲁棒性好和可靠性高,被广泛应用于工业过程控制中[1]。
基于粒子群算法的PID控制器优化设计
基于粒子群算法的PID控制器优化设计1、案例背景PID控制器的性能取决于Kp、Ki、Kd这3个参数是否合理,因此,优化PID控制器参数具有重要意义。
目前,PID控制器参数主要是人工调整,这种方法不仅费时,而且不能保证获得最佳的性能。
PSO已经广泛应用于函数优化、神经网络训练、模式分类、模糊系统控制以及其它应用领域,本案例将使用PSO进行PID控制器参数的优化设计。
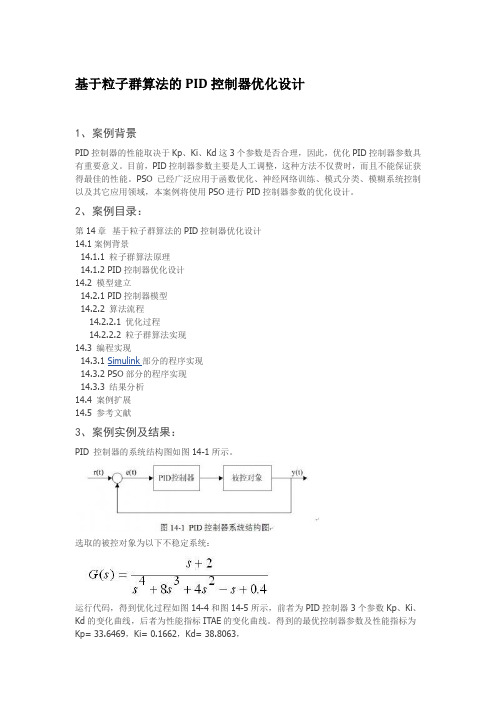
2、案例目录:第14章基于粒子群算法的PID控制器优化设计14.1案例背景14.1.1 粒子群算法原理14.1.2 PID控制器优化设计14.2 模型建立14.2.1 PID控制器模型14.2.2 算法流程14.2.2.1 优化过程14.2.2.2 粒子群算法实现14.3 编程实现14.3.1 Simulink部分的程序实现14.3.2 PSO部分的程序实现14.3.3 结果分析14.4 案例扩展14.5 参考文献3、案例实例及结果:PID 控制器的系统结构图如图14-1所示。
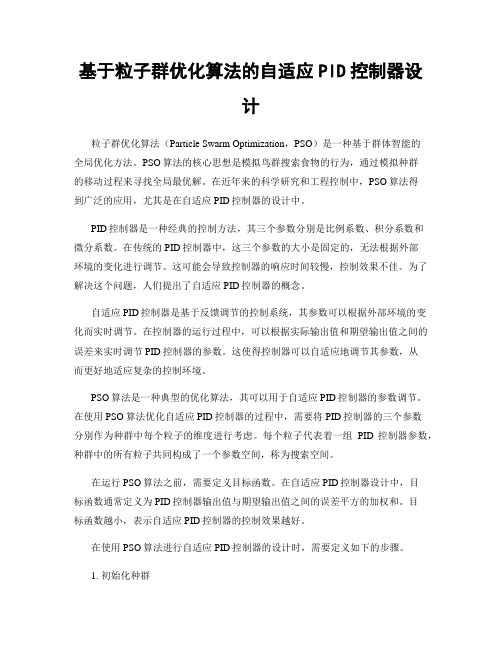
选取的被控对象为以下不稳定系统:运行代码,得到优化过程如图14-4和图14-5所示,前者为PID控制器3个参数Kp、Ki、Kd的变化曲线,后者为性能指标ITAE的变化曲线。
得到的最优控制器参数及性能指标为Kp= 33.6469,Ki= 0.1662,Kd= 38.8063,ITAE= 1.0580,将以上参数代回如图14-2所示的模型,得到的单位阶跃响应曲线如图14-6所示。
本案例使用粒子群算法优化PID控制器参数,事实上,其它的优化算法,比如遗传算法、模拟退火算法等,也可以用于PID控制器的参数优化,这里将使用遗传算法(Genetic Algorithm, GA)对PID控制器进行参数优化。
得到的进化过程曲线、最优参数对应的单位阶跃响应曲线分别如图14-7、图14-8所示。
4、主程序:%% 清空环境clearclc%% 参数设置w = 0.6; % 惯性因子c1 = 2; % 加速常数c2 = 2; % 加速常数Dim = 3; % 维数SwarmSize = 100; % 粒子群规模ObjFun = @PSO_PID; % 待优化函数句柄MaxIter = 100; % 最大迭代次数MinFit = 0.1; % 最小适应值Vmax = 1;Vmin = -1;Ub = [300 300 300];Lb = [0 0 0];%% 粒子群初始化Range = ones(SwarmSize,1)*(Ub-Lb);Swarm = rand(SwarmSize,Dim).*Range + ones(SwarmSize,1)*Lb % 初始化粒子群VStep = rand(SwarmSize,Dim)*(Vmax-Vmin) + Vmin % 初始化速度fSwarm = zeros(SwarmSize,1);for i=1:SwarmSizefSwarm(i,:) = feval(ObjFun,Swarm(i,:)); % 粒子群的适应值end%% 个体极值和群体极值[bestf bestindex]=min(fSwarm);zbest=Swarm(bestindex,:); % 全局最佳gbest=Swarm; % 个体最佳fgbest=fSwarm; % 个体最佳适应值fzbest=bestf; % 全局最佳适应值%% 迭代寻优iter = 0;y_fitness = zeros(1,MaxIter); % 预先产生4个空矩阵K_p = zeros(1,MaxIter);K_i = zeros(1,MaxIter);K_d = zeros(1,MaxIter);while( (iter < MaxIter) && (fzbest > MinFit) )for j=1:SwarmSize% 速度更新VStep(j,:) = w*VStep(j,:) + c1*rand*(gbest(j,:) - Swarm(j,:)) + c2*rand*(zbest - Swarm(j,:));if VStep(j,:)>Vmax, VStep(j,:)=Vmax; endif VStep(j,:)<Vmin, VStep(j,:)=Vmin; end% 位置更新Swarm(j,:)=Swarm(j,:)+VStep(j,:);for k=1:Dimif Swarm(j,k)>Ub(k), Swarm(j,k)=Ub(k); endif Swarm(j,k)<Lb(k), Swarm(j,k)=Lb(k); endend% 适应值fSwarm(j,:) = feval(ObjFun,Swarm(j,:));% 个体最优更新if fSwarm(j) < fgbest(j)gbest(j,:) = Swarm(j,:);fgbest(j) = fSwarm(j);end% 群体最优更新if fSwarm(j) < fzbestzbest = Swarm(j,:);fzbest = fSwarm(j);endenditer = iter+1; % 迭代次数更新y_fitness(1,iter) = fzbest; % 为绘图做准备K_p(1,iter) = zbest(1);K_i(1,iter) = zbest(2);K_d(1,iter) = zbest(3);end%% 绘图输出figure(1) % 绘制性能指标ITAE的变化曲线plot(y_fitness,'LineWidth',2)title('最优个体适应值','fontsize',18);xlabel('迭代次数','fontsize',18);ylabel('适应值','fontsize',18); set(gca,'Fontsize',18);figure(2) % 绘制PID控制器参数变化曲线plot(K_p)hold onplot(K_i,'k','LineWidth',3)plot(K_d,'--r')title('Kp、Ki、Kd 优化曲线','fontsize',18);xlabel('迭代次数','fontsize',18);ylabel('参数值','fontsize',18); set(gca,'Fontsize',18);legend('Kp','Ki','Kd',1);。
基于改进粒子群优化算法的PID控制器参数优化

基于改进粒子群优化算法的PID控制器参数优化
姜长泓;张永恒;王盛慧
【期刊名称】《应用科学学报》
【年(卷),期】2017(035)005
【摘要】PID参数优化是控制领域的热点,其控制效果与比例、积分、微分参数有直接关系.为了改善系统性能,提出用一种改进的粒子群优化算法对PID控制器参数进行优化.该算法引入进化速度因子和聚集度因子对权值进行改进,进而改进了速度更新公式,并引入飞行时间因子以改进位置更新公式.通过3种典型函数证明了该算法的优越性,加快了收敛速度,提高了寻优效率.以典型二阶被控模型为研究对象,将上述算法与其他粒子群算法进行对比,表明改进的粒子群算法得到的PID参数具有更好的控制性能.
【总页数】8页(P667-674)
【作者】姜长泓;张永恒;王盛慧
【作者单位】长春工业大学电气与电子工程学院,长春130012;长春工业大学电气与电子工程学院,长春130012;长春工业大学电气与电子工程学院,长春130012【正文语种】中文
【中图分类】TP301.6
【相关文献】
1.基于改进粒子群优化算法的末修子母弹总体参数优化设计 [J], 寇保华;张红朝;张晓今;杨涛
2.基于改进粒子群优化算法的先进绝热压缩空气储能系统参数优化 [J], 周檬;贾亚雷
3.基于改进粒子群优化算法的PID控制器整定 [J], 杨智;陈志堂;范正平;李晓东
4.基于改进粒子群优化算法的PID控制器参数优化 [J], 安凤栓;常俊林;苏丕朝;李亚朋;魏晓宾
5.基于改进的PSO算法的PID控制器参数优化研究 [J], 韩宜轩
因版权原因,仅展示原文概要,查看原文内容请购买。
基于改进粒子群算法的PID控制器参数优化(1)

收稿日期:2008-08-07 修回日期:2008-08-14第26卷 第9期计 算 机 仿 真2009年9月文章编号:1006-9348(2009)09-0156-04基于改进粒子群算法的PI D 控制器参数优化罗 豪,雷友诚(湖南大学电气与信息工程学院,湖南长沙410082)摘要:粒子群优化算法是一种性能优越的寻优算法,但由于早熟问题,影响了算法性能的发挥,同时PI D 控制器是一类广泛使用的控制器,其参数的选取可等效为优化问题,在标准微粒子群算法的基础上,分析了惯性权重对不同粒子的影响,提出了一种基于适应度值的多惯性权重动态调整机制,同时针对标准微粒子群算法易陷入局部最优的特点,引入混沌扰动机制,利用混沌的遍历性、随机性来改善种群的多样性,并将该方法用于P I D 控制器参数整定,仿真结果表明了方法的有效性和优越性。
关键词:微粒子算法;多惯性权重动态调整;混沌扰动;比例积分微分控制器中图分类号:TP273 文献标识码:BOpti m izati on of PI D Controller Para m erters Based onI mproved Particle S war m A l gorith m sL UO H ao ,LE I You-cheng(Co llege o fM echanical Eng i nee ri ng ,Hunan U n i v ers it y ,Changsha H unan 410082,Ch i na)AB STRACT :P arti c l e S w ar m Opti m izer is a probability a l go rith m w ith excell ent perfor m ance .But t he pre ma t ure phe -no m enon li m its the e ffect of PSO.P ID contro ll er i s a w ide l y used controll er ,its perfor m ance depends on t he opti m ization of P I D contro ller para m erters .Based on the standard PSO a l go rith m ,the i nfl uence o f i nertialw e i ght on different particles i s ana l yzed ,and a M u lti-w e i ght dynam ic ad j usti ng mechanis m based on fitness value is proposed .In v i ew the d isad -vantage that the standard PS O a l gor it h m s w ou l d easil y be trapped i n l oca l opti m u m,t he paper i ntroduces t he chaos per -turbati on m echan i s m to i m prove the s war m variety by usi ng rando m icity and ergodicity ,and this i m proved PS O is utilized to opti m ize P ID controller paramerters .S i m u l a tion results show tha t this m et hod is effecti ve and execllent .KEY W ORDS :P arti c le s wa r m opti m ization a l go rith m;M ulti-we i ght dynam ic adj usti ng ;Chaos pe rt urba tion ;P ID con -tro ller1 引言P I D 控制是工业过程控制中应用最广泛的策略之一,因此P I D 控制器的参数优化成为人们广泛关注的问题。
基于改进粒子群算法的神经网络PID控制研究

基于改进粒子群算法的神经网络PID控制研究
张文华
【期刊名称】《机械工程与自动化》
【年(卷),期】2012(000)003
【摘要】BP神经网络PID控制是利用BP神经网络的自学习和逼近任意非线性函数功能,对PID控制器的三个参数进行在线整定,但网络初始权值的选取困难.采用改进的PSO算法优化BP神经网络的初始权值,并对基于PAO算法的BP神经网络PID控制进行仿真实验.仿真结果表明,PSO算法使得网络初始权值的选取比较快速,系统的性能有所提高.
【总页数】3页(P104-106)
【作者】张文华
【作者单位】中北大学信息与通信工程学院,山西太原030051
【正文语种】中文
【中图分类】TP183
【相关文献】
1.基于改进粒子群算法的PID控制器在MPPT中的研究 [J], 陈阳;刘朝涛;谭克银
2.基于改进粒子群算法的PID控制器参数整定与仿真研究 [J], 宝永安;
3.基于改进粒子群算法自整定伺服系统PID控制器的研究 [J], 叶海平
4.基于改进粒子群算法的船舶航向PID控制研究 [J], 陈林;王恒家;王化明;吴巧瑞
5.基于改进粒子群算法的船舶航向PID控制研究 [J], 陈林;王恒家;王化明;吴巧瑞
因版权原因,仅展示原文概要,查看原文内容请购买。
基于粒子群算法的PID控制器研究与应用

P O算法 即粒子群优化算法,它是对鸟群觅食 过程 中的 S 迁徙和聚集的模拟 ,更确切地说是 由简单个体组成的群 落与 环境 以及个体之间的互动行为 。该算法是利用 局部个体的行 为, 而预 测整个群体 的运动趋势 ,目前在工业控制、 函数 参数
21 02年第 4期
( 总第 10期) 2
信 息 通 信
I NFORM AT ON & CO^ 仉 C I NI ATI ONS
2 l 02
(u . N 2 ) Sm o 1 0
基于粒子群算法 的 PD控制器研 究与应用 I
孙 静
( 乡职业技术 学院 , 新 河南 新 乡4 3 0 ) 5 0 0
() 2 使用形态学的开. 闭运算和 闭. 开运算可 以去除脉搏信
搏波检测算法[]电子测量技术 ,0 l3 ( )7 9 J. 2 1 ,4 6 :17 [】 胡学龙 . 7 数字图像 处理 ( 2版)M]北京: 第 [ . 电子工业出版
社 ,0 1 1512 2 1 :7 .8
号图中小于结构元素 的噪声 。
时域 方 程 中 的后 两 项 可 以用 数 值 逼 近 法 近 似 。下 列 方 程 式 的 采 样 周 期 为 T采 样 点 tk = T。
r I 1
优化等方面。本文将利用粒子群算法对 PD控制器的参数进 I
行优化研究 。
1基于粒子群算法的 PD参数优化 I
11 I . P D控 制器 PD控制是将偏差 的比例、 I 积分和微分通过线性组合构成
性、 适应性和鲁棒性 , 而验证 了优化方案的可行性和有效性。 进 关键词: 粒子群算法; 比例积分微控制器; 参数整定参 中图分类号 :P 7 文献标识码 : 文章编号 :6313(020—05 2 T 23 A 17.112 1 ) 03— 4 0
基于改进粒子群算法的PID控制器参数整定_祁佳

计算机与现代化2009年第1期JIS UAN JI YU X IAN DA I H UA总第161期文章编号:1006-2475(2009)01-0060-03收稿日期:2007-12-25基金项目:国家自然科学基金资助项目(60574042);南京信息工程大学基金资助项目(GD56)作者简介:祁佳(1982-),女,辽宁沈阳人,南京信息工程大学信息与控制学院硕士研究生,研究方向:优化算法,智能控制;罗琦(1958-),男,湖北武汉人,教授,博士生导师,研究方向:偏泛函微分方程及随机函数分析等;王德强(1983-),男,山东泗水人,硕士研究生,研究方向:优化算法,智能控制。
基于改进粒子群算法的PID 控制器参数整定祁 佳,罗 琦,王德强(南京信息工程大学信息与控制学院,江苏南京210044)摘要:粒子群算法是一种新的基于群体智能的全局优化算法,算法简单并且容易实现,已经被广泛应用在各个领域。
本文为改善传统P ID 控制器的参数整定问题,提出了一种改进的粒子群算法。
并用它来优化P ID 控制器的三个参数,得到的控制器结构简单,易于实现,仿真结果证明这种控制器具有良好的性能。
关键词:P I D;参数整定;粒子群优化算法中图分类号:T P273.2 文献标识码:ATuning of P I D Controller Para m eters Based on I mproved Particle S war m Opti m ization A lgorith mQ I Jia ,LUO Q i,WANG De -q i a ng(Co ll ege of Informa ti on&Contro l o f N an jing Infor m ation Sc i ence &T echno l ogy U niversity ,N anji ng 210044,Ch i na)Ab stract :Particle S w ar m O pti m iza tion (PSO )has been a nove l g l oba l opti m ization a l gor it hm wh i ch is based on s wa r m i n tell-i gence .It is easy to be rea lized and a lready appli ed to m any fields .In order t o refor m t he proble m o f P ID contro ller para m eters ,th i s pape r presen ts a nove l i m proved P S O a l go rith m,the t h ree pa rame ters o f P I D contro ller are opti m ized by this a l go rith m.The structure of controller is si m p l e and t he s i m u l ation resu lt proves tha t this contro ller i s feasi b le and effectua.l K ey w ords :P ID ;tuni ng parame ters ;PSO a l gor it hm0 引 言在控制工程中,PI D (Proporti o na-l I ntegra-l Deriva -ti v e ,比例-积分-微分控制器),具有结构简单、易于实现、鲁棒性好和性价比高等优点,所以得到广泛的应用。
基于改进粒子群优化算法的PID控制器参数整定

基于改进粒子群优化算法的PID控制器参数整定
蒋凌云;魏庆来;张峰华;王博宇;张俊康;韦欣彤
【期刊名称】《控制工程》
【年(卷),期】2024(31)3
【摘要】针对标准粒子群优化算法优化PID控制器参数存在的早熟以及陷入局部
最优等问题,引入粒子二阶振荡环节、反向学习、自适应惯性权重,并结合设计的惯
性权重动态调整策略、粒子越界随机反射墙,提出一种新型分阶段迭代的改进粒子
群优化算法。
在6个标准测试函数上进行测试,其性能相比于一些已有的改进粒子
群优化算法更加优秀。
将这些算法用于自动电压调节器系统的PID控制器参数整定,仿真结果表明,所提出的改进粒子群优化算法整定的PID控制器的控制效果更好。
【总页数】8页(P470-477)
【作者】蒋凌云;魏庆来;张峰华;王博宇;张俊康;韦欣彤
【作者单位】中国科学院自动化研究所复杂系统管理与控制国家重点实验室;中国
地质大学(北京)信息工程学院
【正文语种】中文
【中图分类】TP29
【相关文献】
1.基于改进粒子群优化算法的PID参数整定
2.基于粒子群优化算法的PID控制器
参数整定3.基于改进粒子群优化算法的PID控制器整定4.基于改进粒子群算法的PID控制器参数整定优化5.基于改进粒子群优化算法的四旋翼PID参数整定研究
因版权原因,仅展示原文概要,查看原文内容请购买。
基于粒子群优化算法的自适应PID控制器设计
基于粒子群优化算法的自适应PID控制器设计粒子群优化算法(Particle Swarm Optimization,PSO)是一种基于群体智能的全局优化方法。
PSO算法的核心思想是模拟鸟群搜索食物的行为,通过模拟种群的移动过程来寻找全局最优解。
在近年来的科学研究和工程控制中,PSO算法得到广泛的应用,尤其是在自适应PID控制器的设计中。
PID控制器是一种经典的控制方法,其三个参数分别是比例系数、积分系数和微分系数。
在传统的PID控制器中,这三个参数的大小是固定的,无法根据外部环境的变化进行调节。
这可能会导致控制器的响应时间较慢,控制效果不佳。
为了解决这个问题,人们提出了自适应PID控制器的概念。
自适应PID控制器是基于反馈调节的控制系统,其参数可以根据外部环境的变化而实时调节。
在控制器的运行过程中,可以根据实际输出值和期望输出值之间的误差来实时调节PID控制器的参数。
这使得控制器可以自适应地调节其参数,从而更好地适应复杂的控制环境。
PSO算法是一种典型的优化算法,其可以用于自适应PID控制器的参数调节。
在使用PSO算法优化自适应PID控制器的过程中,需要将PID控制器的三个参数分别作为种群中每个粒子的维度进行考虑。
每个粒子代表着一组PID控制器参数,种群中的所有粒子共同构成了一个参数空间,称为搜索空间。
在运行PSO算法之前,需要定义目标函数。
在自适应PID控制器设计中,目标函数通常定义为PID控制器输出值与期望输出值之间的误差平方的加权和。
目标函数越小,表示自适应PID控制器的控制效果越好。
在使用PSO算法进行自适应PID控制器的设计时,需要定义如下的步骤。
1. 初始化种群初始化种群中的每个粒子,将其位置随机生成在搜索空间中,并给每个粒子随机分配初速度。
2. 计算适应度值对于每个粒子,通过输入控制系统的运行状态和控制参数,计算它的适应度值。
3. 更新全局最优解在整个种群中,记录具有最佳适应度值的粒子对应的控制参数。
基于改进粒子群算法的PID控制器优化设计
基于改进粒子群算法的PID控制器优化设计作者:庄石榴王爱元来源:《科学与财富》2018年第17期摘要:PID控制器是根据PID控制原理对整个控制系统进行偏差调节,从而使被控变量的实际值与工艺要求的预定值一致。
不同的控制规律适用于不同的生产过程,必须合理选择相应的控制规律,否则PID控制器将达不到预期的控制效果。
目前,PID控制器参数主要是人工调整,这种方法不仅费时,而且不能保证获得最佳的性能。
粒子群算法已经广泛应用于函数优化、神经网络训练、模糊系统控制以及其他应用领域,本文通过改进粒子群算法对PID控制器进行优化设计。
关键词:改进粒子群算法;PID控制器;优化设计(一). PID控制器原理PID 控制器是一个在工业控制应用中常见的反馈回路部件[1-2],其应用范围非常广泛。
它的一般形式如下:分别是对系统误差信号及其积分与微分量的加权。
控制器通过KP,Ki,Kd就能够计算出控制信号来驱动受控对象。
如果控制器的设计合理,那么控制信号将会使得误差往减小的方向变化,达到最终控制的要求。
PID控制器的系统结构如图1所示。
PID控制器的优化问题就是确定一组合适的参数KP,Ki,Kd,使得指标达到最优。
本文选用ITAE指标作为最终的最优化目标。
(二). PID控制器模型的建立在simulink中搭建PID控制器模型,如图2所示。
本文选取的被控对象为以下不稳定系统:(三). 改进粒子群算法优化改进粒子群算法[3-4]中粒子在搜索空间中的速度和位置以如下公式更新:通过在matlab中编制程序,种群规模设置为400,最大迭代次数为200,最小适应值为0.2,速度范围为[-1,1]。
运行程序得到最优控制参数分别为KP=33.6470,Ki=0.1762,Kd=38.7880,性能指标如图3所示,ITAE=1.05。
(四).结论本文通过改进粒子群算法来优化PID控制器,优化时间大大缩减,优化效果大为提升,实验仿真结果我们可以从中得到,改进的粒子群算法使其全局搜索能力得到了提高与改善,其收敛速度和寻优速度也得到增强。
基于改进粒子群算法的神经网络PID控制研究

21 0 2年 6月
机 械 工 程 与 自 动 化 ME CHANI CAL ENGI NEE NG & AUT0M ATI) RI (N
No. 3
J n u.
文 章 编 号 :6 2 6 1 ( O 2 O — 1 4 0 1 7- 4 3 2 1 )3 0 0- 3
… … … … … … … … … … … … … … … … … …
性、 时变 和纯滞 后 等 特点 , 用 传 统 P D 参 数整 定 方 采 I
法很 难取 得令人 满 意 的控制 效 果 , 现 在更 多地 采 用 故
网络有 三个输 出节点 , 别对 应 P D控 制 器 的三个 参 分 I
数 KpK Kd 、 、 。
智 能 P D控 制 方 法 。智 能 P D控 制 方 法 能够 根 据 整 I I 个 系统 的运行状 态不 断 自动 调整 P D控 制器 的参数 , I 比传 统 的 P D参 数整定 方法 更具有 灵活性 和适应 性 。 I B ( ak P o a ain 神 经 网络 具 有 自学 习 、 P B c rpgt ) o 逼 近任 意非 线性 函数 的能 力 , 以根据 系 统 的运 行 状 态 可
。
…… … () 2
其 中 : 为输 入层 的个 数 。 M 网络 隐含层 的输入 、 出分别为 : 输
M
△ () K [ ( ) e忌 1] 志 一 P 七 一 ( 一 ) +Kf( ) e 忌 +Kd × [( ) ek 1 +ek ) P 最 一2 ( 一 ) ( 一2 ]。 … …… ……… … ( ) 1
』-0 -
( ) 厂 ’奄 )。 … … … … … … ・ ・ 4 愚 = ( () … ・( )
一种粒子群优化RBF神经网络的PID控制方法[发明专利]
![一种粒子群优化RBF神经网络的PID控制方法[发明专利]](https://img.taocdn.com/s3/m/caf7ec22cd7931b765ce0508763231126edb7793.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 202011315001.7(22)申请日 2020.11.20(71)申请人 成都精航伟泰科技有限公司地址 610000 四川省成都市高新区天府三街69号1栋17层1703号(72)发明人 郝海生 黄茂强 杨红英 (74)专利代理机构 成都顶峰专利事务所(普通合伙) 51224代理人 曾凯(51)Int.Cl.G05B 13/04(2006.01)(54)发明名称一种粒子群优化RBF神经网络的PID控制方法(57)摘要本发明涉及自动控制技术领域,公开了一种粒子群优化RBF神经网络的PID控制方法,包括:初始化粒子群优化算法;利用粒子群的进化规则进行寻优;将第一最优解进行码;确定BRF神经网络的网络结构;将所述BRF神经网络的参数的最优解进行解码;确定BP神经网络的网络结构;计算所述BP神经网络输入值和输出值;利用所述BP神经网络的迭代算法修正所述BP网络的加权系数持续调参,直至获取最优参。
本发明通过对无人机姿态控制器的PID参数进行自适应控制,首先,利用粒子群优化算法改进的RBF神经网络PID控制比传统的BP神经网络PID控制的响应时间快,且超调小;其次,基于粒子群优化改进的RBF网络参数整定时间有效缩短;且基于粒子群PSO改进的RBF网络参数整定算法效率高。
权利要求书2页 说明书6页 附图5页CN 112327631 A 2021.02.05C N 112327631A1.一种粒子群优化RBF神经网络的PID控制方法,其特征在于,所述方法包括:步骤A:采集聚类样本,用减聚类算法对样本进行聚类分析,确定基函数的中心个数;步骤B:初始化粒子群优化算法,确定变异粒子群优化算法的粒子群位数M,并给出粒子群惯性权重范围[W min,W max]、加速系数c1和c2、位置范围[X min,X max]、速度范围[V min,V max];步骤C:利用粒子群的进化规则进行寻优,并实时调整粒子的速度和位置,以获取粒子的最优解;步骤D:将所述第一最优解进行码,以获取得到基函数的中心位置和宽度;步骤E:计算BRF神经网络的隐含层的单元输出和输出层的单元输出;步骤F:确定所述BRF神经网络的输入层节点数m和隐含层节点数s,并给出隐含层节点的中心矢量C j(0)、基宽带参数的初值b j(0)、加权系数w j(0)、学习速率ρ、惯性系数此时计算次数k=1;步骤G:利用粒子群的进化规则对所述BRF神经网络的参数进行寻优,获取所述BRF神经网络的参数的最优解;步骤H:将所述BRF神经网络的参数的最优解进行解码,并对解码后的所述BRF神经网络进行学习;步骤I:确定BP神经网络的输入层节点数M和隐含层节点数Q,并给出各层加权系数初值W ij(0)和W li(0),选定学习速率η和惯性系数a,此时计算次数k=1;步骤J:采样得到所述BP神经网络的输入值r(k)、输出值y(k),计算该时刻的误差e(k);步骤K:计算所述BP神经网络输入值和输出值,所述BP神经网络的输出值为PID控制系统的三个可调节参数,然后计算得到u(k),将u(k)传入被控对象以及所述RBF辨识网络,并产生所述控制对象的下一步输出y(k+1);步骤L:利用所述BP神经网络的迭代算法修正所述BP网络的加权系数,令计算次数k=k +1,返回至步骤C继续运算,直至所述PID控制系统的调节参数达到最优,结束当前流程。
基于改进型粒子群算法的PID神经网络控制系统

基于改进型粒子群算法的PID神经网络控制系统沈学利;徐涛【期刊名称】《计算机系统应用》【年(卷),期】2011(020)010【摘要】The traditional PID neural network (FIDNN) limited the scope of application and integration problems are difficult to obtain the error rule. For the realization of nonlinear multivariable control systems, neural network control system to expand the application range of this paper, based on improved version particle swarm optimization algorithm for PID neural network control system design solution, replacing the traditional BP back the propagation algorithm, simulation results show that compared with traditional PIDNN, the steady-state system, robustness and accuracy have improved obviously, this method is effective to improve the use of PID control, intelligent method for the PID Control proposed a new reference.%针对传统的PID神经网络(PIDNN)应用范围受限及积分误差规则难以获取的问题.为实现对非线性多变量系统的有效控制,拓展神经网络控制系统的应用范围,提出了基于改进型粒子群算法在PID神经网络控制系统设计中的解决方案,取代了传统的BP反向传播算法.仿真结果表明,与传统的PIDNN相比,系统的稳定性、鲁棒性及精确性都有了明显的提高,该方法有效的提高了PIDNN控制的使用范围,为智能方法在PID控制中的应用提出了一个新的参考.【总页数】4页(P129-132)【作者】沈学利;徐涛【作者单位】辽宁工程技术大学电子与信息工程学院,葫芦岛125105;辽宁工程技术大学电子与信息工程学院,葫芦岛125105【正文语种】中文【相关文献】1.基于改进粒子群算法的神经网络PID控制研究 [J], 张文华2.基于合作粒子群算法的PID神经网络非线性控制系统 [J], 朴海国;王志新;张华强3.基于粒子群算法的PID神经网络解耦控制 [J], 周西峰;林莹莹;郭前岗4.神经网络基于改进型粒子群算法的研究 [J], 郭伟;陈广义5.基于改进型BP神经网络自整定的PID控制 [J], 胡宗镇;赵延立因版权原因,仅展示原文概要,查看原文内容请购买。
基于改进粒子群优化算法的PID控制器整定

基于改进粒子群优化算法的PID控制器整定杨智;陈志堂;范正平;李晓东【期刊名称】《控制理论与应用》【年(卷),期】2010(027)010【摘要】由传统的Z-N(Ziegler-Nichols)整定公式得出的PID参数,不能得到最佳的控制性能.为此,本文提出一种基于适应度指数定标和边界缓冲墙相结合的改进型粒子群算法,应用于PID参数的整定.首先采用适应度指数定标的选中概率,挑选出粒子进行随机变异;其次对越界的粒予进行缓冲,保证粒子落在寻优空间内以增加粒子种群多样性,同时调整种群粒子个数、社会和认知因子以提高寻优效率.在仿真实验中,将改进的粒子群算法分别应用于5种不同的工业过程,整定他们的PID参数.对误差绝对值乘以时间积分的性能指标(ITAE)做最小化,得到了相应的PID参数,验证了这里提出的改进型粒子群算法的有效性.【总页数】8页(P1345-1352)【作者】杨智;陈志堂;范正平;李晓东【作者单位】中山大学信息科学与技术学院,广东,广州,510275;中山大学信息科学与技术学院,广东,广州,510275;中山大学信息科学与技术学院,广东,广州,510275;中山大学信息科学与技术学院,广东,广州,510275【正文语种】中文【中图分类】TP18【相关文献】1.基于改进粒子群优化算法的PID参数整定 [J], 湛锋;魏星;郭建全;胡志坚;陈允平2.基于遗传算法对PID控制器参数的整定 [J], 高成;庞家腾3.基于遗传算法对PID控制器参数的整定 [J], 高成;庞家腾;4.基于正交试验法整定主动悬架PID控制器参数 [J], 张裕晨;高坤明;路艳玲;郭宗和;马驰骋5.基于D分解的分数阶PID控制器的图形化参数整定 [J], 陈思溢;牛旭因版权原因,仅展示原文概要,查看原文内容请购买。
一种基于改进粒子群算法的PID控制器参数整定算法[发明专利]
![一种基于改进粒子群算法的PID控制器参数整定算法[发明专利]](https://img.taocdn.com/s3/m/f82e402058f5f61fb63666a9.png)
专利名称:一种基于改进粒子群算法的PID控制器参数整定算法
专利类型:发明专利
发明人:蒋敏兰,姜岚,李飞
申请号:CN201710490679.0
申请日:20170614
公开号:CN107272403A
公开日:
20171020
专利内容由知识产权出版社提供
摘要:本发明专利公开了一种基于改进粒子群算法的PID控制器参数整定算法,它包括如下步骤:步骤一、初始化算法参数;步骤二、进入迭代循环,进行每个粒子的位置和速度更新;步骤三、随机在当前位置的邻域内寻找一个新的位置;步骤四、计算两个位置的适应度差值,当新位置的适应度劣于原始位置但优于全局最优位置时,利用模拟退火机制判定是否接受新位置;步骤五、更新种群的全局最优位置,进行自然选择操作,根据适应度值对所有粒子进行排列,利用较优的一部分粒子的信息替代另一半粒子的信息;步骤六、判断是否终止迭代;步骤七、输出PID控制器参数或者重新执行步骤二,本发明能自动整定控制参数,且克服了传统的粒子群算法极易陷入局部最优的缺陷,实现了模拟退火操作和自然选择策略的互补,在保证算法收敛次数的前提下,提高了算法的收敛精度,具有更强的鲁棒性和精度,使得PID控制器能产生更为优秀的控制效果。
申请人:浙江师范大学
地址:321004 浙江省金华市婺城区迎宾大道688号
国籍:CN
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
c h a r a c t e i r s t i c s i n t h e c o m p l e x MI MO o b j e c t i n h i g h c o u p l i n g e f f e c t 。
D O I : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1 — 4 5 5 1 . 2 0 1 5 . 0 2 . 0 2 9
一
种基于改进的粒子群优化算法的 神经 网络 P I D控制器
金 林骏 , 方 建 安 , 潘 磊 宁
( 东华大学 信息科学与技术学院 ,上海 2 0 1 6 2 0 )
法 的收缩 因子 以保 证优化 的收敛性 , 并进行 了 M a t l a b 仿真。 研 究结果表 明 , 所提 出的神 经网络 P I D 控制器 的改进粒子 群算 法优化 , 在高耦 合效应的复杂 M I M O 对 象中具有 良 好 的精度 以及快速响应的特性。
关键词 :神经网络 ;P I D控制器 ;多输人 多输 出;解耦 ;改进的粒子群优化算 法
a n d t h e i n t e r a c t i o n b e t we e n t h e p h y s i c a l me c h a n i s m o f P I D c o n t r o l t h e o r y we r e s t u d i e d . T h e i n i t i a l we i g h t s b e t w e e n n e u r o n P I D c o n t r o l l e r h i d d e n l a y e r a n d o u t p u t l a y e r we r e s u mma iz r e d . A k i n d o f p a r t i c l e s wa l x n o p t i mi z a t i o n a l g o r i t h m wa s p u t f o r w a r d . T h e s h i r n k a g e f a c t o r o f P S O a l g o r i t h m wa s i mp r o v e d t o g u a r a n t e e t h e c o n v e r g e n c e o f o p t i mi z a t i o n a n d Ma t l a b s i mu l a t i o n wa s u s e d . T h e r e s e a r c h r e s u l t s i n d i c a t e t h a t t h e n e u r l a PI D c o n t r o l l e r o p t i mi z e d b y i mp r o v e d p a r t i c l e s wa r m o p t i mi z a t i o n a l g o r i t h m h a s g o o d a c c u r a c y a n d f a s t r e s p o n s e
中图 分 类 号 : T P 2 7 3 文 献标 志码 : A 文章 编 号 : 1 0 0 1 — 4 5 5 1 ( 2 0 1 5 ) 0 2 — 2 9 5 — 0 6
Ne u r a l P I D c o n t r o l l e r b a s e d o n i mp r o v e d p a r t i c l e
摘要: 针对 多输 入多输 出( MI M O) 复杂过程控 制中控制性能偏慢等 问题 , 对神经 网络 P I D控 制器 以及 P I D控制理论物理机制之间 的
相互 作用进行 了研究 。对神经元 P I D控制器 隐层 和输 出层 之间的初 始权 值进行了归纳 , 提 出了一种粒子群优化算法 , 提高了 P S O算
Ab s t r a c t :Ai mi n g a t t h e c o mp l i c a t e d p r o c e s s c o n t r o l i n t h e c o n t r o l p e r f o r ma n c e i s s l o w a n d o t h e r i s s u e s , n e u r a l n e t wo r k P I D c o n t r o l l e r
第3 2 卷 第2 期 2 0 1 5 年 2月
机
电
工
程
Vo 1 .3 2 No .2 F e b .2 01 5
J o u r n a l o f Me c h a n i c a l& E l e c t r i c a l E n g i n e e r i n g
s wa r m o pt i mi z a t i o n a l g o r i t hm
J I N L i n - j u n , F A N G J i a n — a n ,P AN L e i — n i n g
( C o l l e g e o f I n f o r m a t i o n S c i e n c e s a n d T e c h n o l o g y ,D o n g h H a U n i v e r s i t y , S h a n g h a i 2 0 1 6 2 0 ,C h i n a )