ctgu嵌入式 μCOS II-实验5 消息队列
ARM & μCOS-II嵌入式系统实验教程

上海市浦东新区浦东软件园郭守敬路498号1206室邮件: supports@电话: 86-21-50271068 1目录实验一 µC/OS-II移植 (3)1 实验目的 (3)2实验基础 (3)3准备事项 (3)4实验原理 (3)5程序编译与下载 (13)6实验思考 (15)实验二任务管理实验 (16)1实验目的 (16)2实验基础 (16)3准备事项 (16)4实验原理 (16)5实验内容 (20)6实验思考 (22)实验三同步和进程通信实验 (24)1实验目的 (24)2实验基础 (24)3准备事项 (24)4实验原理 (24)5实验内容 (28)6实验思考 (31)实验四优先级逆转实验 (32)1实验目的 (32)2实验基础 (32)3准备事项 (32)4实验原理 (32)5实验内容 (34)6实验思考 (40)实验五实时中断实验 (41)1实验目的 (41)2实验基础 (41)3准备事项 (41)4实验原理 (41)5实验内容 (46)6实验思考 (49)实验六任务抖动实验 (50)1实验目的 (50)2实验基础 (50)上海市浦东新区浦东软件园郭守敬路498号1206室邮件: supports@电话: 86-21-50271068 23准备事项 (50)4实验原理 (50)5实验内容 (53)6实验思考 (57)实验七钟点构件实验 (58)1实验目的 (58)2实验基础 (58)3准备事项 (58)4实验原理 (58)5实验内容 (62)6实验思考 (65)实验八串行通信构件实验 (66)1实验目的 (66)2实验基础 (66)3准备事项 (66)4实验原理 (66)5实验内容 (69)6实验思考 (72)实验九 TIMER构件实验 (73)1实验目的 (73)2实验基础 (73)3准备事项 (73)4实验原理 (73)5实验内容 (76)6实验思考 (80)上海市浦东新区浦东软件园郭守敬路498号1206室邮件: supports@电话: 86-21-50271068 3实验一µC/OS-II移植1 实验目的1、掌握移植的概念、方法和步骤2、掌握ARM体系结构3、掌握μC/OS-II软件和硬件体系结构4、学习ARM指令集和ARM处理器硬件特征5、学习μC/OS-II移植条件和在ARM上的移植方法2实验基础1、建立移植概念。
ucosII实验报告-消息队列

【实验目的】1.了解ADS集成开发环境,完成ADS的安装;2. 嵌入式实时操作系统µC/OS-II中消息队列机制的基本原理和使用方法。
【实验原理】1. 操作系统配置如下:#define TASK_STACK_SIZE 10*1024#define TASK_PRIO 10#define TSK_NUM 5#define N_MSG 10#define TASK1 1#define TASK2 22.相关系统调用如下:OSTaskCreate():建立一个新任务OSQCreate():建立一个消息队列OSQPend():等待消息OSQPostFront() :向消息队列发送消息OSQPost():向消息队列发送消息OSQQuery() :取得消息队列的信息OSQFlush ():清空消息队列OSQDel() :删除消息队列OSTimeDly ():任务延时3. 设计消息结构。
定义如下结构体:typedef struct msg_type{ // 定义消息结构体INT8U num; // 数据INT8U who; // 标记发送方}MY_MSG;对于who 可取的值,定义如下宏:#define TASK1 1#define TASk2 24. 定义消息指针数组与事件控制块void *MsgGrp[N_MSG]; //定义消息指针数组OS_EVENT* Msg_Q;//定义事件控制块事件控制块的初始化:(在主函数中)Msg_Q = OSQCreate( &MsgGrp[0], N_MSG); // create msg queue【实验要求】通过消息队列在任务间传递数据:1.任务TA1以随机(或固定)时间间隔依次将数据1、2、3、...发送至消息队列q1,每次发送一个数据。
2.TA2以随机(或固定)时间间隔将随机数据发送至q1。
3.TA3从消息队列q1中每次接收一个数据:如果数据来自TA1,则计算出所有已接收的来自TA1的数据之和,然后延时;如果数据来自TA2,则将数据输出到屏幕,然后延时(模拟处理数据所需的时间);调整发送数据和处理数据的速度,观察发送速度大于处理速度的结果。
ucos消息队列通信

嵌入式实时操作系统实验报告《实验三消息队列与任务间通信》班级嵌入式11002班姓名朱杰学号1004681224指导教师谢治平一实验要求本次通过设计两个实验任务,了解嵌入式实时操作系统µC/OS-II中消息队列机制的基本原理和使用方法。
二实验目的掌握嵌入式实时操作系统µC/OS-II中消息队列机制的基本原理和使用方法。
三操作系统配置#define OS_MAX_TASKS 3/*最多可以创建3个任务*/#define OS_LOWEST_PRIO 16/*任务优先级不可以大于14*/#define OS_TASK_CREATE_EN 1/*允许使用OSTaskCreate()*/#define OS_TASK_SUSPEND_EN 1/*允许使用OSTaskSuspend() and OSTaskResume()*/四.µC/OS-II相关函数OSTaskCreate():建立一个新任务OSQCreate():建立一个消息队列OSQPend():等待消息OSQPostFront() :向消息队列发送消息OSQPost():向消息队列发送消息五相关系统调用·OSTaskCreate():建立一个新任务·OSTaskSuspend():无条件挂起一个任务·OSTaskResume():唤醒一个挂起的任务·OSTimeDly():将一个任务延时若干个时钟节拍六应用任务实验设计I(1)设计I要求●通过消息队列在任务间传递数据:任务TA1以随机(或固定)时间间隔依次将数据1、2、3、...发送至消息队列q1,每次发送一个数据。
TA2以随机(或固定)时间间隔将随机数据发送至q1。
TA3从消息队列q1中每次接收一个数据:如果数据来自TA1,则计算出所有已接收的来自TA1的数据之和,然后延时;如果数据来自TA2,则将数据输出到屏幕,然后延时(模拟处理数据所需的时间);●调整发送数据和处理数据的速度,观察发送速度大于处理速度的结果(2)实验代码#include "../ucos-ii/includes.h" /* uC/OS interface */#include "string.h"//#include "includes.h"#define TASK_STK_SIZE 512#define N_MESSAGES 128OS_STK TaskStartStk[TASK_STK_SIZE]; /* TaskStart任务堆栈*/ OS_STK TA1Stk[TASK_STK_SIZE];OS_STK TA2Stk[TASK_STK_SIZE];OS_STK TA3Stk[TASK_STK_SIZE];OS_EVENT *Str_Q;void TaskStart(void *data);void TA1(void *pdata);void TA2(void *pdata);void TA3(void *pdata);INT8U err;INT8U total=0;charbuf[128];void * ql[N_MESSAGES] ;typedefstruct{int list;intnum;}Mess;void Main(void){//Target_Init();ARMTargetInit();OSInit();Str_Q=OSQCreate(&ql[0],N_MESSAGES);OSTaskCreate(TaskStart,(void*)0, &TaskStartStk[TASK_STK_SIZE - 1], 0);ARMTargetStart();OSStart();while(1);}voidTaskStart(void *pdata){OSTaskCreate(TA1,(void*)0, &TA1Stk[TASK_STK_SIZE - 1],1); /* 创建任务TA1 */ OSTaskCreate(TA2,(void*)0, &TA2Stk[TASK_STK_SIZE - 1],2); /* 创建任务TA2 */ OSTaskCreate(TA3,(void*)0, &TA3Stk[TASK_STK_SIZE - 1],3); /* 创建任务TA3 */while(1)OSTimeDly(1000);}void TA1(void *pdata){INT8U err;for(;;){INT32U t;INT32U r;Mess mess;t = OSTime;r = srand(t);mess.list=1;mess.num=3;OSQPostFront(Str_Q,&mess);sprintf(buf, "TA1 post\n");armulPrintf(buf);OSTimeDlyHMSM(0,0,2,0);}}void TA2(void *pdata){for(;;){INT32U t;INT32U r;Mess mess;t = OSTime;r = srand( t );mess.list=2;mess.num=2;OSQPostFront(Str_Q,&mess);sprintf(buf, "TA2 post\n");armulPrintf(buf);OSTimeDlyHMSM(0,0,3,0);}}void TA3(void *pdata){for(;;){Mess* receive;receive=OSQPend(Str_Q,0,&err);if(receive->list==1){total+=receive->num;sprintf(buf,"TA1 Post %d...,total=%d \n", receive->num,total); armulPrintf(buf);}else{sprintf(buf, "TA2 Post %d... \n", receive->num); armulPrintf(buf);}OSTimeDlyHMSM(0,0,1,0);}}(3) 实验运行效果实验设计二(1)实验要求在设计I的基础上,要求保证在任何情况下,在任一时刻消息队列q1中来自任务TA2的数据不超过一个。
嵌入式μCOS-II内核实验四(哲学家就餐问题的实现)

目录
• 引言 • 哲学家就餐问题概述 • μcos-ii内核任务管理 • 哲学家就餐问题的μcos-ii实现 • 实验结果与分析 • 总结与展望
01
引言
嵌入式系统与μcos-ii内核简介
嵌入式系统
是一种专用的计算机系统,主要用于控制、监视或帮助操作 机器设备。它通常具有实时性、可靠性和低功耗等特点,广 泛应用于工业控制、智能家居、医疗设备等领域。
任务优先级与调度
任务优先级
在μcos-ii内核中,每个任务都有自己 的优先级。优先级高的任务会优先获 得CPU的使用权。
任务调度
μcos-ii内核使用基于优先级的抢占式任务 调度算法。当一个高优先级的任务就绪时, 内核会立即抢占当前正在运行的任务,并切 换到高优先级的任务上运行。
任务同步与通信
任务同步
解决方案的分类与比较
解决方案分类
解决哲学家就餐问题的方案可以分为两类:静态方案和动态方案。静态方案在 系统启动时分配固定的资源,而动态方案则在运行时动态地分配资源。
解决方案比较
静态方案实现简单,但可能导致死锁或饥饿问题。动态方案可以更好地解决这 些问题,但实现起来较为复杂,需要更多的系统资源和时间。在实际应用中, 需要根据具体需求和系统限制选择合适的解决方案。
05
实验结果与分析
实验环境与配置
01
硬件平台
ARM Cortex-M4微控制器 (具体型号为
STM32F407ZGT6)
02
开发环境
Keil uVision5
03
04
实验任务
实现基于μcos-ii内核的多任务 切换
配置参数
任务优先级、任务堆栈大小、 任务状态等
嵌入式实时操作系统μCOS原理与实践5-精选文档

作者卢有亮 图书PPT和全部代码下载/15441
《嵌入式实时操作系统原理与实践》
在信号量、互斥信号量和事件标志组的内 容结束后,读者对事件之间如何同步,如 何根据不同需要设计同步程序,应该有了 深入的理解和提高。本章的消息管理中包 括消息邮箱和消息队列两方面的内容,适 用于任务之间的信息交流和同步。从原理 上讲,消息管理也应该属于事件管理的范 畴。
《嵌入式实时操作系统原理与实践》
第5章 消息管理
5.1 消息邮箱 5.1.1 建立消息邮箱 5.1.2等消息 5.1.3 发消息 5.1.4 删除消息邮箱 5.1.5放弃邮箱等待 5.1.6 无等待请求消息 5.1.7查询邮箱状态 5.1.8 消息邮箱的例子 5.2 消息队列 5.2.1 消息队列数据结构 5.2.2 初始化消息队列 5.2.3 建立消息队列 5.2.4发消息到消息队列 5.2.5等待消息队列中的消息 5.2.6删除消息队列 5.2.7取得消息队列的状态 5.2.8消息队列应用举例 习题
作者卢有亮 图书PPT和全部代码下载/15441
《嵌入式实时操作系统原理与实践》
作者卢有亮 图书PPT和全部代码下载/15441
《嵌入式实时操作系统原理与实践》 开 始
5.1.2等消息
参 数 检 查 是 否 通 过 是 否
《嵌入式实时操作系统原理与实践》
嵌入式实时操作系统 μC/OS原理与实践
教材 :嵌入式实时操作系统μC/OS原理与实践 电子工业出版社 作者:卢有亮 电子科技大学能源科学与工程学院
作者卢有亮 图书PPT和全部代码下载/15441
回 作者卢有亮返 图书 PPT和全部代码下载/15441
《嵌入式实时操作系统原理与实践》
嵌入式μCOS-II实验报告模板

3.1 多任务编程实验3.1.1 实验目的1. 本实验的目的是让学生了解uC/OS-II中怎样创建一个任务以及了解uC/OS-II的多任务调度机制。
3.1.2 实验内容1. 在Eg1的基础上新建一个任务;2. 在该任务函数中打印提示信息。
3.1.3 预备知识1. C语言的基础知识;2. 程序调试的基础知识和方法。
3.1.4 实验设备1. 硬件:JXARM9-2410教学实验箱、PC机;2. 软件:PC机操作系统 Windows 98(2000、XP) + ADT IDE集成开发环境。
3.1.5 实验步骤本章将以Eg1为基础,在其上添加一个任务。
1. 打开Eg1工程打开examples/ucos工作区,并设置Eg1工程为活动工程。
然后打开App目录下的eg1.C 文件。
2. 声明任务栈在eg1.c文件中声明任务堆栈,下面代码中黑体字表示的为新添加的代码:/* task stack */OS_STK StackLED[STACKSIZE]= {0, };OS_STK StackSEG[STACKSIZE]= {0, };OS_STK StackTEST[STACKSIZE]= {0, };任务栈以全局变量的方式静态分配,然后在创建任务时使用。
3. 添加任务ID/* task name string */char IdLED = '1';char IdSEG = '2';char IdTEST = '3';4. 任务函数声明/* task entry function */void TaskLED(void *Id);void TaskSEG(void *Id);void TaskTEST(void *Id);5. 任务函数实现在TaskSEG函数后添加如下函数:/** Task entry function.* this task blink the seg every 200 ticks* that is 1s.*/void TaskTEST(void *Id){uHALr_printf("Task3() called\n");for (;;){OSSchedLock();uHALr_printf("Task%c() turned\n", *(char *)Id);User_SEG_Blink();OSSchedUnlock();OSTimeDly(100);}}在该函数中实现数码管显示,由于在TaskSEG中也进行了数码管显示,因此,请先将TaskSEG中的数码管显示功能关闭,以更好地看到效果,修改后的TaskSEG函数如下:void TaskSEG(void *Id){uHALr_printf("Task2() called\n");for (;;){OSSchedLock();uHALr_printf("Task%c() turned\n", *(char *)Id);// User_SEG_Blink();OSSchedUnlock();OSTimeDly(100);}}6. 创建任务然后在Main函数中创建任务,添加TaskTEST的创建代码,如下所示:/** create the tasks in uC/OS and assign increasing* priorities to them so that Task3 at the end of* the pipeline has the highest priority.*/OSTaskCreate(TaskLED, (void *)&IdLED, (OS_STK *)&StackLED[STACKSIZE - 1], 5);/* Create seg blink tasks */OSTaskCreate(TaskSEG, (void *)&IdSEG, (OS_STK *)&StackSEG[STACKSIZE - 1], 13);/* Create test tasks */OSTaskCreate(TaskTEST, (void *)&IdTEST, (OS_STK *)&StackTEST[STACKSIZE - 1], 15);7. 编译选择“Build”->“Rebuild All”功能编译工程,如果出现错误,修改代码,然后重新编译,直到成功。
嵌入式操作系统核原理开发(消息队列)
嵌入式操作系统核原理开发(消息队列)嵌入式操作系统内核原理和开发(消息队列)消息队列是线程交互的一种方法,任务可以通过消息队列来实现数据的沟通和交换。
在嵌入式系统上,这可以说这是用的最多的一种方法。
通过消息队列,无论是发送者,还是接受者都可以循环地处理各种消息。
而我们知道,存储消息最好的方式就是循环队列,如果消息已满,那么发送者可以把自己pend到等待队列上;而如果此时没有消息,那么接受者也可以把自己pend到等待队列上。
当然实现消息队列的方法很多,甚至用户可以自己利用互斥量和信号量来实现,而嵌入式系统常常会默认提供这样的功能函数,我想主要的目的还是为了方便用户,让他们可以更多地从业务的角度来看问题,而不是把重点关注在这些底层的细节上面。
首先,我们还是看看rawos上面关于消息队列的数据结构是怎么定义的,1typedef struct RAW_MSG_Q {23 RAW_VOID **queue_start; /* Pointer to start of queue data*/4 RAW_VOID **queue_end; /* Pointer to end of queue data*/5 RAW_VOID **write; /* Pointer to where next message willbe inserted in the Q */6 RAW_VOID **read; /* Pointer to where next message will beextracted from the Q */7 RAW_U32 size; /* Size of queue (maximum number of entries)*/8 RAW_U32 current_numbers; /* Current number of entries in thequeue */9 RAW_U16 blocked_send_task_numbers; /*number of blocked send tasknumbers */10 RAW_U16 blocked_receive_task_numbers; /*number of blocked send tasknumbers */1112 } RAW_MSG_Q;1314typedef struct RAW_QUEUE15 {16 RAW_COMMON_BLOCK_OBJECT common_block_obj;17 RAW_MSG_Q msg_q;1819 } RAW_QUEUE;上面的代码中有两段数据结构,第一段主要表示循环队列的内容,其中包括了队列首地址、队列末尾地址、当前队列读取地址、当前队列插入地址、队列大小、消息个数、阻塞的发送线程数据、阻塞的接受线程数目。
北邮研究生嵌入式系统实验课程——第4-2节 VxWorks任务间通信
创建信号量
SEM_ID semBCreate( options, initialState)
– Options 为阻塞在该信号量的任务规定排队的类 型(SEM_Q_PRIORTY或SEM_Q_FIFO) – initialState 初始化信号量为可用(SEM_FULL)或 不可用(SEM_EMPTY)
VxWorks提供三种类型的信号量
–二进制信号量:最快和常用的信号量,提供阻塞方式,用 于实现同步或互斥 –互斥信号量:用于实现互斥问题的特殊的二进制信号量, 解决具有互斥、优先级继承、删除安全和递归等情况 –计数信号量:类似于二进制信号量,记录信号量被释放的 次数。适合于一个资源的多个实例需要保护的情况
LOCAL SEM_ID fooBinSemId, fooMutexId; LOCAL FOO_BUF fooBuffer; fooSet(); 互斥信号量 … 共享内存 fooGet(); …
链表
lstLib库提供对双向链表进行操作的函数
List Descriptor Header Tail User node1 User node2 NODE
任务锁的使用
taskLock()/taskUnlock()
– 禁止所有其它任务执行 – 当非常频繁地做某事时使用 – 注意要保持critical region短
funcA () {
taskLock (); . . /* critical region of code that cannot be interrupted */ . taskUnlock ();
等待事件的任务调用semTake(),并一直阻塞 到得到信号量 检测到事件的任务或中断调用semGive();解锁 了等待事件的任务
嵌入式实时操作系统(μCOS-II)原理与应用-目录与正文-最新版第四部分D

.OSTCBOpt 存放有关任务的附加信息。
当用户将OS_TASK_CREATE_EXT_EN设为1 时,这个变量才有效。
通过设置该选项,可起用任务栈检查功能。
例如:作为参数传给OSTaskCreateExt()。
μC/OS-Ⅱ目前只支持 3 个选择项:OS_TASK_OTP_STK_CHK, OS_TASK_OPT_STK_CLR 和OS_TASK_OPT_SAVE_FP 。
OS_TASK_OTP_STK_CHK 用于告知TaskCreateExt(),在任务建立的时候任务栈检验功能得到了允许。
S_TASK_OPT_STK_CLR 表示任务建立的时候任务栈要清零,只有在用户需要有栈检验功能时,才需要将栈清零。
如果不定义OS_TASK_OPT_STK_CLR,而后又建立、删除了任务,栈检验功能报告的栈使用情况将是错误的。
假如任务一旦建立就决不会被删除,且用户初始化时,已将RAM 清过零,就不需要再定义OS_TASK_OPT_STK_CLR,这样可以节约程序执行时间。
传递了OS_TASK_OPT_STK_CLR 将增加TaskCreateExt()函数的执行时间,因为要将栈空间清零。
栈容量越大,清零花的时间越长。
最后一个选择项OS_TASK_OPT_SAVE_FP 通知TaskCreateExt(),任务要做浮点运算。
如果微处理器有硬件的浮点协处理器,则所建立的任务在做任务调度切换时,会保存浮点寄存器的内容。
.OSTCBId 用于存储任务的识别码。
该变量现在没有使用,留给将来扩展用。
.OSTCBNext 和.OSTCBPrev 用于任务控制块OS_TCBs 的双向使用表链接,该链表在时钟节拍函数OSTimeTick()中使用,用于刷新各个任务的任务延迟变量.OSTCBDly。
OSTCBNext、OSTCBPrev:用于将任务控制块OS_TCB插入到空闲链表;或在任务建立的时候链接到双向使用链表中;或在任务删除的时候从链表中被删除。
ucosII嵌入式实时操作系统实验
嵌入式实时操作系统实验报告多任务的创建及运行系别计算机与电子系专业班级电子0901班学生姓名高傲指导教师黄向宇提交日期 2012 年 4 月 1 日一、实验目的1.熟悉并掌握基于uC/OS-II的开发工具、工程管理工具2.了解uC/OS-II的文件结构、文件之间的依赖关系。
3.掌握创建多任务的方法及对任务进行相关操作的技巧。
二、实验内容1.建立并熟悉Borland C 编译及调试环境2.使用课本配套光盘中的例程运行并修改,观察多任务的运行状态,尝试对其中的任务进行挂起并恢复、删除及查询等操作,观察运行结果.3.完成课后练习题,P92页13-17题,至少完成其中任意两题。
三、实验原理1.编译环境Turbo C是Borland公司开发的DOS下16位C语言集成开发工具。
有2.0和3.0版本,2.0只支持C语言编译不支持鼠标操作,而3.0版本可以支持C/C++两种语言编译,而且还支持鼠标和//注释方式;TC2.0是80年代开发的,使用了很多年一直到现在WINDOWS系统才逐渐退出舞台。
Turbo C2.0不仅是一个快捷、高效的编译程序,同时还有一个易学、易用的集成开发环境。
使用Turbo C2.0无需独立地编辑、编译和连接程序,就能建立并运行C语言程序。
因为这些功能都组合在Turbo 2.0的集成开发环境内,并且可以通过一个简单的主屏幕使用这些功能。
一个工程中的源文件不计其数,其按类型、功能、模块分别放在若干个目录中,makefile定义了一系列的规则来指定,哪些文件需要先编译,哪些文件需要后编译,哪些文件需要重新编译,甚至于进行更复杂的功能操作,因为 makefile 就像一个Shell脚本一样,其中也可以执行操作系统的命令。
makefile带来的好处就是——“自动化编译”,一旦写好,只需要一个make 命令,整个工程完全自动编译,极大的提高了软件开发的效率。
make是一个命令工具,是一个解释makefile中指令的命令工具,一般来说,大多数的IDE都有这个命令,比如:Delphi的make,Visual C++的nmake,Linux 下GNU的make。
队列的存储实验报告(3篇)

第1篇一、实验目的1. 理解队列的基本概念和特点,掌握队列的存储结构。
2. 熟练掌握队列的顺序存储和链式存储结构,以及它们的基本操作。
3. 分析并比较队列顺序存储和链式存储结构的优缺点。
4. 利用队列解决实际问题,提高数据结构在实际应用中的运用能力。
二、实验内容1. 队列的顺序存储结构及操作(1)顺序存储结构队列的顺序存储结构是一种基于数组的存储方式,它利用一段连续的存储单元来存储队列中的元素。
队列的顺序存储结构具有以下特点:- 队列头指针指向队列的第一个元素。
- 队列尾指针指向队列的最后一个元素。
- 队列满的条件:队尾指针与队列头指针之差等于队列的最大长度。
- 队列空的条件:队尾指针等于队列头指针。
(2)队列的基本操作- 入队操作:将元素插入队列的队尾。
- 出队操作:删除队列的第一个元素。
- 判断队列是否为空。
- 判断队列是否已满。
2. 队列的链式存储结构及操作(1)链式存储结构队列的链式存储结构是一种基于链表的存储方式,它由多个节点组成,每个节点包含数据和指向下一个节点的指针。
队列的链式存储结构具有以下特点:- 队列头指针指向队列的第一个节点。
- 队列尾指针指向队列的最后一个节点。
- 队列空的条件:队头指针等于队尾指针。
(2)队列的基本操作- 入队操作:创建一个新节点,将其插入队列的队尾。
- 出队操作:删除队列的第一个节点。
- 判断队列是否为空。
- 判断队列是否已满。
三、实验步骤1. 设计并实现队列的顺序存储结构,实现队列的基本操作。
2. 设计并实现队列的链式存储结构,实现队列的基本操作。
3. 分析并比较队列顺序存储和链式存储结构的优缺点。
4. 利用队列解决实际问题,如模拟排队购票等。
四、实验结果与分析1. 队列的顺序存储结构实验结果表明,队列的顺序存储结构具有以下优缺点:优点:- 顺序存储结构简单,易于实现。
- 队列的基本操作具有常数时间复杂度 O(1)。
缺点:- 队列的顺序存储结构存在假溢出问题,当队列未满时,也可能无法插入元素。
uCOSII消息队列的使用方法

uCOSII消息队列的使用方法uCOS II 消息队列的使用方法2010-03-14 02:421、需在以下文件中配置如下内容OS_CFG.HOS_MAX_QS N 你需要的值根据需要自己配置#define OS_Q_EN 1 /* Enable (1) or Disable (0) code generation for QUEUES */#define OS_Q_ACCEPT_EN 1 /* Include code for OSQAccept() */#define OS_Q_DEL_EN 1 /* Include code for OSQDel() */#define OS_Q_FLUSH_EN 1 /* Include code for OSQFlush() */ #define OS_Q_POST_EN 1 /* Include code for OSQPost() */ #define OS_Q_POST_FRONT_EN 1 /* Include code for OSQPostFront() */#define OS_Q_POST_OPT_EN 1 /* Include code for OSQPostOpt() */#define OS_Q_QUERY_EN 1 /* Include code for OSQQuery() */2、建立一个指向消息数组的指针和数组的大小,该指针数组必须申明为void类型,如下:void *MyArrayOfMsg[SIZE];3、声明一个OS_EVENT类型的指针指向生成的队列,如下:OS_EVENT *QSem;4、调用OSQcreate()函数创建消息队列,如下:QSem = OSQcreate(&MyArrayOfMsg[0],SIZE);5、等待消息队列中的消息,OSQPend()。
void *OSQPend (OS_EVENT *pevent, INT16U timeout, INT8U *err):必须保证消息队列已经被建立。
嵌入式OS实验报告五

嵌入式OS实验报告五实验时间2012/12/27 报告人一、实验目的:1.掌握嵌入式实时操作系统µC/OS-II中消息队列机制的基本原理和使用方法。
二、实验要求:1.安装LambdaTOOL;2.设计6个普通应用任务:TA0(优先级为1)、TA1(优先级为2)、TA2(优先级为3)、TA3(优先级为4)、TA4(优先级为5)、TA5(优先级为6),以及一个控制任务TaskCon(优先级为7)验证消息队列机制。
三、问题:1.简述µC/OS-II中消息队列机制的基本方法及相应函数。
首先,在main()函数中通过q1 = OSQCreate(&Msg1[0],6);q2 = OSQCreate(&Msg2[0],6); 创建两个消息队列。
然后,在TaskStart任务中创建并启动所有的应用任务。
应用任务TA0,TA1,TA2从队列q1中按LIFO 方式取消息;应用任务TA3,TA4,TA5从队列q2中按FIFO 方式取消息。
任务TaskCon实现清空消息队列、查询消息队列的功能。
接着,任务向队列申请消息。
OSQPend()函数用于任务等待消息。
最后,队列向任务发送消息。
队列q1是按照后入先出(LIFO)的方式发送消息的:OSQPostFront();队列q2是按照先入先出(FIFO)的方式发送消息:OSQPost()。
函数OSQFlush ()和OSQQuery()可分别用来清空消息队列并且忽略发送往队列的所有消息和取得消息队列的信息。
2.绘制程序流程图。
3.实验中遇到的问题和解决方法。
问题:在往消息队列中添加消息时,系统出现多次报满解决方法:程序中有个延时函数OSTimeDlyHMSM(),更改其延时时间后,多次报满的问题就会解决。
嵌入式实时操作系统ucosII实验2
嵌入式实时操作系统实验报告任务间通信机制的建立系别计算机与电子系专业班级电子0901班学生姓名高傲指导教师黄向宇提交日期 2012 年 4 月 1 日一、实验目的二掌握在基于嵌入式实时操作系统μC/OS-II的应用中,任务使用信号量的一般原理。
掌握在基于优先级的可抢占嵌入式实时操作系统的应用中,出现优先级反转现象的原理及解决优先级反转的策略——优先级继承的原理。
二、实验内容1.建立并熟悉Borland C 编译及调试环境。
2.使用课本配套光盘中第五章的例程运行(例5-4,例5-5,例5-6),观察运行结果,掌握信号量的基本原理及使用方法,理解出现优先级反转现象的根本原因并提出解决方案。
3.试编写一个应用程序,采用计数器型信号量(初值为2),有3个用户任务需要此信号量,它们轮流使用此信号量,在同一时刻只有两个任务能使用信号量,当其中一个任务获得信号量时向屏幕打印“TASK N get the signal”。
观察程序运行结果并记录。
4. 试编写一个应用程序实现例5-7的内容,即用优先级继承的方法解决优先级反转的问题,观察程序运行结果并记录。
5.在例5-8基础上修改程序增加一个任务HerTask,它和YouTask一样从邮箱Str_Box里取消息并打印出来,打印信息中增加任务标识,即由哪个任务打印的;MyTask发送消息改为当Times为5的倍数时才发送,HerTask接收消息采用无等待方式,如果邮箱为空,则输出“The mailbox is empty”, 观察程序运行结果并记录。
三、实验原理1. 信号量µC/OS-II中的信号量由两部分组成:一个是信号量的计数值,它是一个16位的无符号整数(0 到65,535之间);另一个是由等待该信号量的任务组成的等待任务表。
用户要在OS_CFG.H中将OS_SEM_EN开关量常数置成1,这样µC/OS-II 才能支持信号量。
在使用一个信号量之前,首先要建立该信号量,也即调用OSSemCreate()函数(见下一节),对信号量的初始计数值赋值。
2.消息队列实验

2.消息队列实验2.6消息队列实验2.6.1 实验目的掌握嵌入式实时操作系统μC/OS-II 中消息队列机制的基本原理和使用方法。
2.6.2 实验设备硬件:STM32 实验平台,ULINK2 仿真器套件,PC 机;软件:μVision IDE for ARM 集成开发环境。
2.6.3 实验设计在本实验中,设计了 6 个普通应用任务:Task1(优先级为1)、Task2(优先级为2)、Task3(优先级为3)、Task4(优先级为4)、Task5(优先级为5)、Task6(优先级为6),以及一个控制任务TaskCon(优先级为7)。
μC/OS-II 中,等待消息的任务总是按照优先级的高低来决定获得消息的顺序的。
具体的设计思路为:●创建队列的功能:创建一个等待属性为FIFO 的消息队列1;创建一个等待属性为LIFO 的消息队列2。
●考察以FIFO 方式释放消息的消息队列:由任务Task1、Task2、Task3 等待队列1中的消息。
Task1、Task2、Task3 使用相同的任务代码(T askq1 函数)。
●考察以LIFO 方式释放消息的消息队列:由任务Task4、Task5、Task6 等待队列2中的消息。
Task4、Task5、Task6 使用相同的任务代码(T askq2 函数)。
●考察删除消息队列的安全性:在任务T ask4、Task5、Task6 等待队列2 中的消息的过程中,让TaskCon 删除队列2;当队列2 被删除后,检查任务Task4、Task5、T ask6 调用接收消息的函数是否返回错误码。
2.6.4 本实验中所用到的μC/OS-II 相关函数1. OSQCreate()该函数用于建立一个消息队列。
任务或中断可以通过消息队列向一个或多个任务发送消息。
消息的含义是和具体的应用密切相关的。
函数原型:OS_EVENT *OSQCreate( void **start, INT8U size);参数说明:start 是消息内存区的首地址,消息内存区是一个指针数组。
关于队列的实验报告(3篇)

第1篇一、实验目的1. 理解队列的基本概念和特点。
2. 掌握队列的顺序存储结构和链式存储结构。
3. 熟悉队列的基本操作,包括队列的建立、入队、出队、判断队列是否空等。
4. 通过实验加深对队列在实际问题中的应用理解。
二、实验环境1. 操作系统:Windows 102. 编程语言:C++3. 开发环境:Visual Studio 2019三、实验内容1. 实现队列的顺序存储结构。
2. 实现队列的链式存储结构。
3. 实现队列的基本操作,包括入队、出队、判断队列是否空等。
4. 模拟队列在实际问题中的应用。
四、实验步骤1. 队列的顺序存储结构(1)定义队列结构体:```cppstruct Queue {int data[maxSize]; // 队列数组int front; // 队头指针int rear; // 队尾指针};```(2)初始化队列:```cppvoid initQueue(Queue &q) {q.front = 0;q.rear = 0;}```(3)判断队列是否为空:```cppbool isEmpty(Queue q) {return q.front == q.rear;}```(4)判断队列是否已满:```cppbool isFull(Queue q) {return (q.rear + 1) % maxSize == q.front; }```(5)入队:```cppbool enqueue(Queue &q, int element) { if (isFull(q)) {return false;}q.data[q.rear] = element;q.rear = (q.rear + 1) % maxSize; return true;}```(6)出队:```cppbool dequeue(Queue &q, int &element) { if (isEmpty(q)) {return false;}element = q.data[q.front];q.front = (q.front + 1) % maxSize; return true;}```2. 队列的链式存储结构(1)定义队列节点结构体:```cppstruct QNode {int data;QNode next;};```(2)定义队列结构体:```cppstruct Queue {QNode front;QNode rear;};```(3)初始化队列:```cppvoid initQueue(Queue &q) { q.front = NULL;q.rear = NULL;}```(4)判断队列是否为空:```cppbool isEmpty(Queue q) {return q.front == NULL;}```(5)入队:```cppbool enqueue(Queue &q, int element) { QNode newNode = new QNode;newNode->data = element;newNode->next = NULL;if (isEmpty(q)) {q.front = newNode;q.rear = newNode;} else {q.rear->next = newNode;q.rear = newNode;}return true;}```(6)出队:```cppbool dequeue(Queue &q, int &element) { if (isEmpty(q)) {return false;element = q.front->data;QNode temp = q.front;q.front = q.front->next;if (q.front == NULL) {q.rear = NULL;}delete temp;return true;}```3. 模拟队列在实际问题中的应用以医院挂号处为例,模拟患者排队就诊的过程。
嵌入式环形队列和消息队列是如何去实现的?

嵌入式环形队列和消息队列是如何去实现的?嵌入式环形队列和消息队列是实现数据缓存和通信的常见数据结构,广泛应用于嵌入式系统中的通信协议和领域。
环形队列是一种先进先出(FIFO)的数据结构,其中数据被存储在一个环形缓冲区中。
它使用两个指针,分别指向队列的头和尾,以便在读写操作时追踪队列的状态。
当队列满时,新数据将覆盖旧数据,以确保队列的长度保持不变。
环形队列在实现嵌入式通信协议时特别有用,例如UART,CAN等。
消息队列是一种多个发送者和接收者之间共享数据的通信机制。
它允许多个任务或线程向队列发送消息,并允许多个任务或线程从队列中接收消息。
每个消息都有一个固定的大小和格式,并可以根据需要进行排队和检索。
在嵌入式系统中,消息队列广泛用于处理异步事件,例如中断处理和任务之间的通信。
主要应用于:1.网络通信协议(例如TCP/IP,UDP等)中的数据缓存和队列管理。
2.嵌入式操作系统(例如FreeRTOS,uC/OS等)中的任务通信和事件处理。
3.汽车电子领域中的CAN和LIN通信协议。
4.工业自动化领域中的Modbus,Profibus等通信协议。
5.无线通信领域中的蓝牙,Zigbee,LoRa等通信协议。
大致应用1.串口通信中,可以使用环形队列来接收和发送数据。
当接收到新的数据时,将其存储到环形队列中,并在需要发送数据时从队列中取出数据发送。
这种方式可以减少中断处理的时间,提高系统的响应速度。
2.多任务系统中,消息队列用于任务之间的通信。
每个任务都可以向消息队列中发送消息,其他任务可以从队列中获取消息并进行相应的处理。
这种方式可以实现任务之间的解耦,提高系统的可扩展性和可维护性。
3.实时控制系统中,环形队列可以用于缓存传感器数据或控制命令。
当传感器或其他设备向系统发送数据时,可以将其存储到环形队列中,然后由控制任务从队列中获取数据并进行相应的处理。
这种方式可以减少系统对硬件的依赖性,提高系统的灵活性和可靠性。
《嵌入式实时操作系统uC OS-2教程》课件第5章
第5章 事件控制块
5.4 在等待事件的任务列表中查找 优先级最高的任务
当事件发生后,由于可能有一个或者多个任务在等待该 事件,因此就要在事件的任务等待列表中查找优先级最高的 任务。为了提高查找速度,查找的方法不是从 .OSEvent Tbl[0]开始逐个查询,而是采用了查表的办法,这个表是 OS_CORE.C文件中的定义的OSUnMapTbl[256],其内容如 程序清单5.4所示。在等待事件的任务列表中查找优先级最 高的任务具体实现算法如下:
};
第5章 事件控制块
程序清单5.5 在等待事件的任务列表中查找优先级最高的任 务的代码 y = OSUnMapTbl[pevent->OSEventGrp]; x = OSUnMapTbl[pevent->OSEventTbl[y]]; prio = (y<<3) + x;
(3) 计算最高优先级:Prio = y × 8 + x 这样,最终就可以得到处于等待该事件状态的最高优先 级任务了,其代码如程序清单5.5所示。
第5章 事件控制块
程序清单5.4 OSUnMapTbl[]的内容 INT8U const OSUnMapTbl[] = {
0, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, //0x00 to 0x0F 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, //0x10 to 0x1F 5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, //0x20 to 0x2F 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, //0x30 to 0x3F 6, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, //0x40 to 0x4F 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, //0x50 to 0x5F 5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, //0x60 to 0x6F 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, //0x70 to 0x7F
嵌入式操作系统μCOSII实验okPPT课件

μC/OS-II的任务管理
OSTaskCreate() 建立任务
OSTaskCreateExt() 建立任务扩展版本
OSTaskDel()
删除任务
OSTaskDelReq() 请求删除任务
OSTaskChangePri o()
OSTaskSuspend()
改变任务的优先级 挂起任务
OSTaskResume() 恢复任务
OSTaskStkChk() 堆栈检验
OSTaskQuery() 获得有关任务的信息 14
写在最后
经常不断地学习,你就什么都知道。你知道得越多,你就越有力量 Study Constantly, And You Will Know Everything. The More
You Know, The More Powerful You Will Be
第七章 嵌入式操作系统μCOS-II实验 7.1 μC/OS-II 移植实验 7.2 μC/OS-II 应用实验
1
7.1 μC/OS-II 移植实验 7.1.1实验目的 7.1.2实验设备 7.1.3实验内容 7.1.4实验原理 7.1.5实验操作步骤
2
7.1.1实验目的
了解μC/OS-II移植条件和内核基本结构。 掌握将μC/OS-II内核移植到ARM7处理器 上的方法和步骤。
15
结束语
感谢聆听
不足之处请大家批评指导
ease Criticize And Guide The Shortcomings
讲师:XXXXXX
XX年XX月XX日
16
3
7.1.2实验设备
硬件:Embest S3CEV40实验平台, Embest ARM标准/增强型仿真器套件, PC机。 软件:Embest IDE 2003集成开发环境, Windows 98/2000/NT/XP。
嵌入式实时操作系统(μCOS-II)原理与应用-目录与正文-最新版第四部分A
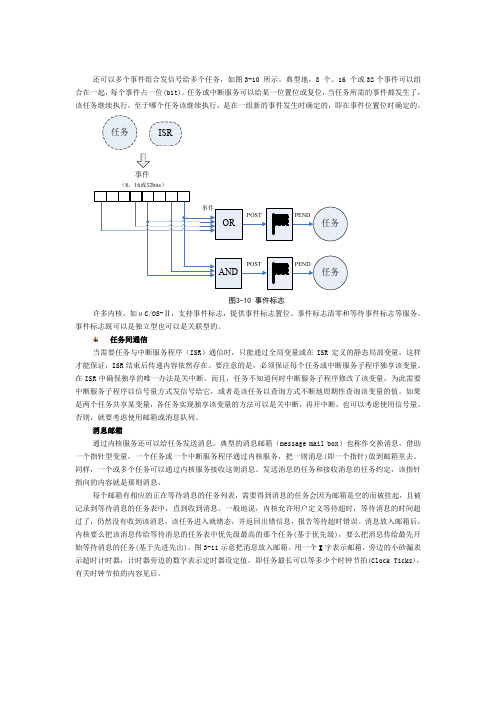
还可以多个事件组合发信号给多个任务,如图3-10 所示。
典型地,8 个、16 个或32个事件可以组合在一起,每个事件占一位(bit)。
任务或中断服务可以给某一位置位或复位,当任务所需的事件都发生了,该任务继续执行,至于哪个任务该继续执行,是在一组新的事件发生时确定的,即在事件位置位时确定的。
事件图3-10 事件标志 许多内核,如μC/OS-Ⅱ,支持事件标志,提供事件标志置位、事件标志清零和等待事件标志等服务。
事件标志既可以是独立型也可以是关联型的。
任务间通信当需要任务与中断服务程序(ISR )通信时,只能通过全局变量或在ISR 定义的静态局部变量,这样才能保证,ISR 结束后传递内容依然存在。
要注意的是,必须保证每个任务或中断服务子程序独享该变量。
在ISR 中确保独享的唯一办法是关中断。
而且,任务不知道何时中断服务子程序修改了该变量,为此需要中断服务子程序以信号量方式发信号给它,或者是该任务以查询方式不断地周期性查询该变量的值。
如果是两个任务共享某变量,各任务实现独享该变量的方法可以是关中断,再开中断,也可以考虑使用信号量。
否则,就要考虑使用邮箱或消息队列。
消息邮箱通过内核服务还可以给任务发送消息。
典型的消息邮箱(message mail box )也称作交换消息,借助一个指针型变量,一个任务或一个中断服务程序通过内核服务,把一则消息(即一个指针)放到邮箱里去。
同样,一个或多个任务可以通过内核服务接收这则消息。
发送消息的任务和接收消息的任务约定,该指针指向的内容就是那则消息。
每个邮箱有相应的正在等待消息的任务列表,需要得到消息的任务会因为邮箱是空的而被挂起,且被记录到等待消息的任务表中,直到收到消息。
一般地说,内核允许用户定义等待超时,等待消息的时间超过了,仍然没有收到该消息,该任务进入就绪态,并返回出错信息,报告等待超时错误。
消息放入邮箱后,内核要么把该消息传给等待消息的任务表中优先级最高的那个任务(基于优先级),要么把消息传给最先开始等待消息的任务(基于先进先出)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
姓名:张定水学号:2013112134
实验5 消息队列
实验内容:(一般包含以下几个方面)
实验的内容以及要求
实验内容:
在本实验中,设计了6 个普通应用任务:TA0(优先级为1)、TA1(优先级为2)、TA2(优先级为3)、TA3(优先级为4)、TA4(优先级为5)、TA5(优先级为6),以及一个控制任务TaskCon(优先级为7)。
uC/OS-II中,等待消息的任务总是按照优先级的高低来决定获得消息的顺序的。
具体的设计思路为:
创建队列的功能:创建一个等待属性为FIFO 的消息队列1;创建一个等待属性为LIFO 的消息队列2。
考察以FIFO方式释放消息的消息队列:由任务TA0、TA1、TA2 等待队列1中的消息。
TA0、TA1、TA2 使用相同的任务代码(Taskq1 函数)。
考察以LIFO方式释放消息的消息队列:由任务TA3、TA4、TA5等待队列2中的消息。
TA3、TA4、TA5 使用相同的任务代码(Taskq2 函数)。
考察清空消息队列、查询消息队列的功能:TaskCon任务向队列2 中连续发送6 条消息,然后查询消息数;清空该队列后再查询。
考察删除消息队列的安全性:在任务TA3、TA4、TA5等待队列2 中的消息的过程中,让TaskCon 删除队列2;当队列2 被删除后,检查任务TA3、TA4、TA5 调用接收消息的函数是否返回错误码。
实验要求:
1.调试代码,运行结果截图,分析结果
2.发送和接收消息有次序吗?怎么保证发一个,收一个?而不是连续发,或者连续收消息?
算法设计以及必要步骤
static void Task1(void *pdata); //接收消息队列1中的消息函数
static void Task2(void *pdata); //接收消息队列2中的消息函数
static void TaskCon(void *pdata); //发送消息函数
代码
见文件exp5.c
运行结果(拷屏)
按实验要求回答问题
1.发送和接收消息有次序吗?怎么保证发一个,收一个?而不是连续发,或者连续收消
息?
总结:(一般包含以下方面)
心得体会
通过这次实验了解了消息队列的作用机制为:消息队列在OSEVENT的基础上附加了一个队列结构,通过队列中的消息的插入与删除实现了一系列的消息队列的功能。
实验扩展
2.发送和接收消息有次序吗?怎么保证发一个,收一个?而不是连续发,或者连续收消
息?
代码见文件exp5拓展部分.c。