嵌入式系统实验报告
嵌入式系统实验报告
嵌入式系统实验报告在本学期的嵌入式系统课程中,我与我的实验伙伴进行了多次实验。
在这篇报告中,我将分享我们实验的过程和结果。
实验一:GPIO控制LED灯在这个实验中,我们使用了Raspberry Pi 3B+开发板和一根杜邦线。
我们在电路板上将一盏LED灯与GPIO引脚连接起来,并编写了一个程序来控制这个引脚的电平状态。
在这个实验中,我们学习了GPIO的基本概念以及如何使用Python编程语言编写GPIO控制程序。
我们成功地让LED灯在不同的时间间隔内闪烁,并且了解了如何使用GPIO.setup()和GPIO.output()函数来控制GPIO引脚的输入和输出。
实验二:串口通信在第二个实验中,我们使用了两个Raspberry Pi 3B+开发板和两根串口线。
我们连接了两个板子的GPIO引脚,使得它们可以通过串口进行通信。
我们使用Python编写了两个程序来进行通信。
一个程序将发送一条消息,另一个程序将接收这个消息并将其打印出来。
通过使用串口通信,我们学会了如何使用Python编写程序来完成数据交换,并掌握了串口通信的基本概念。
实验三:Pi camera模块在第三个实验中,我们使用了Pi camera模块和一个Raspberry Pi 3B+开发板。
我们将摄像头连接到开发板上,并编写了一个程序来捕捉摄像头图像。
我们学习了如何使用Python编程语言来控制Pi camera模块,包括如何设置摄像头参数并如何捕捉静态图像。
我们还尝试了使用OpenCV库来处理图像。
实验四:蓝牙控制在最后一个实验中,我们使用了一个蓝牙透传模块、Raspberry Pi 3B+开发板和一些电路元件。
我们将蓝牙透传模块连接到GPIO引脚,并编写了一个程序来通过蓝牙信号控制电机。
在这个实验中,我们学习了如何使用蓝牙模块进行无线控制。
我们通过使用Python编写控制程序,成功地将蓝牙信号转换成GPIO引脚的电平信号来控制电机。
总结在这个嵌入式系统的实验中,我们学习了许多关于嵌入式系统的知识和技能。
精选嵌入式系统实习报告3篇
精选嵌入式系统实习报告3篇嵌入式系统实习报告篇1ARM嵌入式系统综合设计一.实习时间和地点安排1.实习时间:20xx年XX月03 日—— 20xx年XX月14日,共两周的时间。
2.每天的实习时间安排:上午:8:30——11:30下午:13:30——15:303.实习地点:校内。
二.实习目的1.掌握电子元器件的焊接原理和方法。
2.掌握ARM7 LPC2132控制程序的编写方法。
3.掌握调试软件和硬件的方法。
三.实习内容与要求1.根据设计要求焊接好电路板并测试焊接无误。
2.绘制流程图并编写程序。
3.编译通过后,将程序下载到LPC2132进行调试。
4.调试成功后编写实习报告。
四.LPC2132芯片介绍LPC2132最小系统图及其介绍概述LPC2132是基于一个支持实时仿真和嵌入式跟踪的32/16 位 ARM7TDMI-STM CPU 的微控制器,并带有 32kB、64kB、512 kB 的嵌入的高速Flash 存储器。
128 位宽度的存储器接口和独特的加速结构使 32 位代码能在最大时钟速率下运行。
对代码规模有严格控制的应用可使用 16 位 Thumb?模式将代码规模降低超过 30%,而性能的损失却很小。
较小的封装和极低的功耗使 LPC2131/2132/2138 可理想地用于小型系统中,如访问控制和 POS 机。
宽范围的串行通信接口和片内 8/16/32kB 的 SRAM 使LPC2131/2132/2138 非常适用于通信网关、协议转换器、软 modem 、声音辨别和低端成像,为它们提供巨大的缓冲区空间和强大的处理功能。
多个 32 位定时器、1 个或 2 个 10 位 8 路 ADC 、10 位 DAC 、PWM 通道和 47 个 GPIO 以及多达9 个边沿或电平触发的外部中断使它们特别适用于工业控制和医疗系统。
特性1.小型 LQFP64 封装的 16/32 位 ARM7TDMI-S 微控制器。
嵌入式实验四实验报告
嵌入式实验四实验报告实验四:嵌入式编程设计
实验设计目的:
1. 学习使用嵌入式开发工具进行编程设计;
2. 学习使用C语言编写嵌入式程序;
3. 学习使用GPIO模块进行输入输出;
4. 学习使用中断处理函数。
实验器材:
1. 嵌入式开发板;
2. USB数据线;
3. 电脑;
4. LED灯;
5. 电阻;
6. 蜂鸣器;
7. 其他必要的电路元件。
实验步骤:
1. 连接开发板和计算机,安装开发板驱动程序;
2. 打开嵌入式开发工具,创建一个新的工程;
3. 在工程中添加一个C文件,编写程序;
4. 编写程序实现以下功能:
- 使用GPIO模块控制LED灯的亮、灭;
- 使用GPIO模块读取按键状态;
- 使用GPIO模块控制蜂鸣器的开、关;
- 使用Timer模块计时;
- 使用中断处理函数处理外部中断;
- 其他必要的功能;
5. 编译程序,下载到开发板;
6. 运行程序,测试功能是否正常。
实验结果与分析:
实验结果应当是LED灯、蜂鸣器、按键正常工作,可以通过按键控制LED灯的亮、灭、蜂鸣器的开、关。
实验总结:
通过本次实验,我学会了使用嵌入式开发工具进行编程设计,掌握了使用C语言编写
嵌入式程序的方法。
通过实验,我深入理解了嵌入式系统的原理和实现方法,对嵌入
式系统的应用有了更加深入的了解。
在今后的学习和工作中,我将能够更好地运用嵌
入式技术解决实际问题。
嵌入式系统试验报告

嵌入式系统实验报告学院:计算机科学与工程姓名:___________学号:_______________专业:_______________指导老师:______________完成日期:______________实验一:流水灯案例、8位数码管动态扫描案例一、实验目的1.1 进一步熟悉Keil C51集成开发环境调试功能的使用;1.2 学会自己编写程序,进行编译和仿真测试;1.3 利用开发板下载hex 文件后验证功能。
二、实验原理2.1 :实验原理图030B 〜I ।卜RSI I ™Hi 」 口 UICDR Hr hJJK RR 18q U I. 海水灯电浒周LhE U_EEM^Li > > 第 X > k >n - » =白 L a £0EBS2.2:工作原理2.2.1:流水灯电路中有LO,1,L2,L3,4,L5,L6,L7共八个发光二极管,当引脚LED_ SEL输入为1,对于A、B、C、D、E、F、G、H引脚,只要输入为1,则点亮相连接的发光二极管。
A〜H引脚连接STM32F108VB芯片的PE8〜PE15,程序初始化时,对其进行初始设置。
引脚LED_SEL为1时,发光二极管才工作,否则右边的数码管工作。
注意,LED SEL 连接于PB3,该引脚具有复用功能,在默认状态下,该引脚的I0不可用,需对AFIO_ MAPR寄存器进行设置,设置其为10可用。
2.2.2: 8位数码管数码管中的A~G、DP段分别连接到电路图中的A~G、H线上,当某段上有一-定的电压差值时,便会点亮该段。
当£3输入为1,也就是LED_ 5£1输入为0时,根据SELO〜SEL2的值确定选中的数码管,即位选,再根据A~H引脚的高低电平,点亮对应段,即段选。
三、实验结果3.1:流水灯对于给出的流水灯案例,下载HEX文件后,在开发板上可观察到L0-L7从左至右依次点亮,间隔300ms。
嵌入式系统 实验报告
使能 IRQ 中断。
4 装载并使能外中断;
5 选用 DebugInExram 生成目标,然后编译连接工程。
6 选择【Project】->【Debug】,启动 AXD 进行 JTAG 仿真调试。
7 全速运行程序,LED 闪烁;
8 每一次按键 Key,蜂鸣器就会转换静音或鸣响状态。
四.测试数据及运行结果
1
五.总结
1.实验过程中遇到的问题及解决办法;
由于本次实验较简单,且我们之前学习的微机原理课程也进行了流水灯的设
计实验,所以对于本次实验,我完成地很顺利,在实验中没有遇到问题。
2.对设计及调试过程的心得体会。
本次实验是本学期该课程我们进行的第一次实验,总的来说,实验不是很难,
设计过程也相对简单,其主要目的是让我们熟悉一下实验环境,并且能在实验环
6
五.总结 1.实验过程中遇到的问题及解决办法;
实验第一次运行时,蜂鸣器一直处于鸣响状态,及时按了按键,蜂鸣器还是 一直鸣叫,不产生外中断。后来仔细检查了程序,发现原来是忘记使能 EINT0 中 断了,加上 VICIntEnable = 1<<0x0e 代码,程序就能正常运行了。 2. 对设计及调试过程的心得体会。
境下进行简单的实验操作,为之后的实验打下坚实的基础。
六.附录:源代码(电子版)
#include "config.h"
const uint32 LEDS8 = 0xFF << 18;//P1[25:18]控制 LED1~LED8,低电平点亮
const uint32 KEY = 1 << 16;
//P0.16 连接 KEY1
三.方案设计
① 启动 ADS1.2IDE 集成开发环境,选择 ARM Executable Image for lpc2131
《嵌入式系统》实验报告指导书(含答案).
实验一熟悉嵌入式LINUX开发环境1、实验目的熟悉UP-TECHPXA270-S的开发环境。
学会WINDOWS环境与嵌入式Linu环境共享资源的基本方法。
2、实验内容学习UP-TECHPXA270-S系统的使用、XP和虚拟机之间传送文件方法以及UP-TECHPXA270-S和虚拟机之间共享目录的建立方法。
3、预备知识了解UP-TECHPXA270-S的基本结构和配置,Linux基本知识。
4、实验设备硬件:UP-TECHPXA270-S开发板、PC机(内存500M以上)。
软件:PC机操作系统RADHAND LINUX 9+MIMICOM+RAM LINUX操作系统5、实验步骤(1)、在虚拟机下练习Linux常用命令。
(注意以下操作只能在[root@BC root]#,也就是root文件夹下运行,不然会导致系统不能启动)a. 学习命令通过“man ***”和“*** --help”得到的命令使用方法。
b.学习并掌握如下命令:ls,cd ,pwd,cat,more,less,mkdir, rmdir ,rm,mv,cp,tar,ifconfig(2)、XP与虚拟机之间传送文件(Samba服务器建立、网络设置、文件传送);(3)、了解系统资源和连线;(4)、开发板与虚拟机之间共享目录建立(设置NFS、开发板IP设置、目录挂载),挂载文件;(5)vi(vim)的使用(6)输入qt,启动桌面,按CTRL+C退出6、实验报告要求(1)、XP和虚拟机之间传送文件步骤;虚拟机共享XP文件:选择虚拟机设置,设置要共享的文件启动Linux进入/mnt/hgfs即可看到共享文件夹服务器设置——samba服务器(设置需要共享的目录)XP共享虚拟机文件:服务器设置——samba服务器(设置需要共享的目录)确保网络的PING通(即在同一局域网):1.虚拟机的192.168.1.234(RH9)2.XP的为192.168.1.1253.在XP 下点击开始-》运行(\\192.168.1.234)4.用户名bc密码123456以上实现了Linux虚拟机(RH9)和XP的文件的共享(2)、开发板与虚拟机之间建立共享目录以及文件挂载步骤;1.服务器设置——nfs服务器(设置需要共享的目录)2.设置开发板的ip地址:ifconfig eth0 192.168.1.53.在实验箱终端里输入mount -t nfs -o nolock 192.168.1.234:/up-techpxa270/exp /mnt/nfs4./mnt/nfs即为共享目录(3)、请画出虚拟机、PC机和ARM实验箱之间的硬件连接图;(4)、在Linux中怎样配置网络;系统设置->网络,在新的选项卡中(5)、实验中遇到的问题与解决过程。
嵌入式实训报告范文2篇2
嵌入式实训报告范文 (2)嵌入式实训报告范文 (2)精选2篇(一)嵌入式实训报告一、实训背景嵌入式系统是一种以具体任务为中心,集成了硬件与软件的计算机系统。
由于其体积小、功耗低、功能强大等特点,嵌入式系统被广泛应用于各个领域,如家电、汽车、医疗等。
通过参与嵌入式实训,我希望能够掌握嵌入式开发的基本原理和方法,提高自己的实践能力。
二、实训目标1.掌握嵌入式系统的基本知识和开发工具的使用;2.了解嵌入式系统的硬件架构和软件设计流程;3.能够根据需求设计并实现简单的嵌入式系统。
三、实训内容1.学习嵌入式系统基础知识:通过课堂教学和自主学习,了解了嵌入式系统的概念、特点及应用领域。
深入学习了ARM架构和C语言的基本知识,并进行了相应的实践操作。
2.学习嵌入式开发工具的使用:学习了Keil MDK和IAR Embedded Workbench等常用的嵌入式开发工具的安装和配置方法。
通过实操操作,掌握了调试、编译、下载等基本功能的使用。
3.学习嵌入式系统设计流程:了解了嵌入式软件开发的常用流程,包括需求分析、系统设计、编码实现、调试测试、系统验证等。
通过案例分析和实践操作,对嵌入式系统设计流程有了更深入的了解。
4.设计并实现简单的嵌入式系统:根据实训要求,我选择了一个简单的嵌入式系统项目,通过分析需求、设计系统架构、编写软件代码、调试测试等环节,最终成功完成了项目。
四、实训总结及收获通过参与嵌入式实训,我不仅掌握了嵌入式系统的基本知识和开发工具的使用,还锻炼了自己的实践能力。
我深刻认识到嵌入式系统开发需要全面的知识储备和较高的技术水平,同时也需要良好的分析、设计和沟通能力。
通过实训,我对嵌入式系统开发流程有了更深入的理解,对嵌入式系统的设计和开发也有了更高的认识和要求。
在未来的学习和工作中,我会继续深入学习嵌入式系统开发相关知识,并不断提高自己的实践能力。
嵌入式系统是未来的发展方向,通过不断探索和实践,我相信我能够在这个领域取得更好的成果。
嵌入式实训报告范文2篇

嵌入式实训报告范文嵌入式实训报告范文精选2篇(一)嵌入式实训报告一、实训目的和背景嵌入式实训的目的是通过设计和实现一个嵌入式系统,培养学生的嵌入式系统开发才能和团队协作才能。
本次实训的背景是为了满足社会对嵌入式系统开发人才的需求,进步学生的实际动手才能。
二、实训内容1. 硬件平台的选择和搭建:选择了一款ARM开发板作为硬件平台,并搭建了相应的开发环境。
2. 系统设计和分析:根据实训要求,我们团队设计了一个智能门锁系统,包括用户认证、门锁控制和远程监控功能。
3. 软件开发:使用C语言和嵌入式开发工具进展软件开发,实现了用户认证、门锁控制和远程监控等功能。
4. 硬件连接和调试:将开发板和相关传感器、执行器等硬件设备进展连接和调试,确保系统可以正常运行。
5. 功能测试和调优:对系统进展全面测试,发现并修复了一些问题,并对系统进展了性能优化。
三、实训心得和体会通过本次实训,我深入认识到嵌入式系统开发的复杂性和挑战性。
在实训过程中,我们团队遇到了许多问题,比方硬件和软件的兼容性、性能优化等方面。
但是通过团队的努力和合作,我们成功解决了这些问题,并完成了一个功能完善的嵌入式系统。
此外,我还学到了许多软件开发和硬件调试的技巧,进步了自己的实际动手才能。
在团队协作方面,我们团队成员之间互相配合,共同解决问题,形成了良好的协作机制。
总结起来,本次嵌入式实训让我受益匪浅,学会了许多实际应用的技能和知识,并进步了自身的综合才能。
四、实训成果展示在实训完毕后,我们团队成功完成了一个智能门锁系统,具备用户认证、门锁控制和远程监控等功能。
系统的稳定性和可靠性得到了验证,并且在实际使用中得到了积极的反应。
附图:〔展示系统界面、硬件设备连接示意图等〕五、实训改良意见尽管本次实训获得了良好的成果,但仍有一些方面需要改良。
首先,实训的时间安排可以更合理一些,以便更充分地利用时间进展理论操作。
其次,可以增加一些真实场景的案例分析和解决方案的设计,以提升学生的实际应用才能。
嵌入式系统实验报告一

2008221104210068 陈见08计科2班嵌入式系统实验报告一一.实验目的:1.了解嵌入式开发中的硬件(e.g.EELIOD)与软件(e.g.bootloader)2.了解嵌入式系统的开发环境,内核的下载和启动过程3.了解Linux内核配置和编译过程•了解Linux内核源代码的目录结构以及各目录的相关内容•了解Linux内核一些基本配置选项内容和作用•掌握Linux内核的编译过程4.了解嵌入式文件系统的构建过程•了解嵌入式操作系统种文件系统的类型和作用•掌握利用BusyBox 软件制作嵌入式文件系统的方法•掌握嵌入式Linux 文件系统的的挂载过程二.实验内容:<1>嵌入式系统开发1、bootloader嵌入式系统中通常并没有像BIOS那样的固件程序,因此整个系统的加载启动任务完全由bootloader来完成。
其主要作用是:初始化硬件设备;建立内存空间的映射图;完成内核的加载,为内核设置启动参数。
bootloader 就是在操作系统内核运行之前运行的一段小程序。
通过这段小程序,我们可以初始化硬件设备、建立内存空间的映射图,从而将系统的软硬件环境带到一个合适的状态,以便为最终调用操作系统内核准备好正确的环境。
2、串口设置(minicom)多数嵌入式系统都通过异步串行接口(UART)进行初级引导。
这种通信方式是将字符一位一位地传送,一般是先低位、后高位。
因此,采用串行方式,双方最少可以只用一对连线便可实现全双工通信。
字符与字符之间的同步靠每个字框的起始位协调,而不需要双方的时钟频率严格一致,因此实现比较容易。
启动minicom▪主机运行minicom,该程序通过串口(RS232)和目标机连接。
▪ minicom-s表示对串口进行设置,普通用户不需要这一步。
▪串口设置/dev/ttys0 bps=115200,8位数据,无检验,无流控制。
▪bootloader提示符下面可设定本机IP,宿主机IP,将要下载的内核文件名,文件系统名及其它参数。
嵌入式实习报告
嵌入式实习报告嵌入式实习报告(精选5篇)在生活中,报告的用途越来越大,我们在写报告的时候要注意逻辑的合理性。
相信许多人会觉得报告很难写吧,以下是店铺精心整理的嵌入式实习报告(精选5篇),希望对大家有所帮助。
嵌入式实习报告篇1一、实习时间20xx年4月12日-20xx年4月26日二、指导教师姓名陈xx三、实习地点长沙市牛耳服务外包实训基地四、实习目的与内容对于嵌入式项目进行学习培训,掌握嵌入式的主要项目及相关技术五、实习收获与体会一转眼半个月的实习生活过去了,现在我已经回到学校,回想起半个月的实习生活,自己学到了很多,懂得了很多。
真的说不出是什么感觉,伴着时间,就像是在和自己的影子赛跑,不可能从真实的两面去看清它,只是经意不经意的感受着有种东西在过去,也许更适合的只有那句话:时不待我,怎可驻足。
原以为实习对于我来说会是很长,但实际却不同。
想象收获的东西,真的很多,看看我的工作笔记,一篇又一篇,记别人的事情比自己的还多,也许实习,并不像我想象中的那样轻松惬意,而是充满了挑战和艰辛。
我给自己敲响了警钟:“不要半途而废,做事情切忌三分热度。
”我信心十足的回答到:“我一定会坚持到底!”天下英雄皆我辈,一入江湖立马催。
” 从学校到社会的大环境的转变,身边接触的人也完全换了角色,老师变成老板,同学变成同事,相处之道完全不同。
在这巨大的转变中,我们可能彷徨,迷茫,无法马上适应新的环境,但在同学、同事的帮助和自己摸索的情况下,我还是完成了这次实习。
但我发现,以我们的经验,不学到一定的深度和广度是难以在实际工作中应付自如的。
因此反映出学习的还不够,缺点疏漏。
需在加以刻苦钻研及学习,不断开拓视野,增强自己的实践操作技能,我们也许看不惯企业之间残酷的竞争,无法忍受同事之间漠不关心的眼神和言语。
很多时候觉得自己没有受到领导重用,所干的只是一些无关重要的杂活,自己的提议或工作不能得到老板的肯定。
做不出成绩时,会有来自各方面的压力,老板的眼色同事的嘲讽。
嵌入式实习报告三篇
嵌入式实习报告 篇2
此次设计我们采用以LM3S2100为微控制器,并通过硬件和软件两方面设计,结合6位LED数码管,放大整形电路,来实现频率计在嵌入式系统中的开发与应用。
在易嵌短暂的两个月,我们从linux基础入手,强化了c语言编程,学习了linux系统编程和网络编程。时间虽短,但成长很快,无论是理论知识还是实践能力都得到了大幅度的提高。在这里将理论和实践相结合,相互促进,相互补充,使得学习更加透彻。通过用不同方法实现同一个项目,不断深入,层层推进,学以致用!
在易嵌的这个暑假,我过得充实而快乐。在这里有着同学间的探讨、师生间的互动和魔鬼般的训练!在我丰富多彩的人生路上留下了永远亮丽与难忘的记忆!
VF/VHF/UHF频段的频率,也十分方便和准确。PTS2600使用一个12位数字的LCD液晶显示屏来显示所测得的频率、闸口时间(分辨率相关)、菜单功能以及频率表的测量结果。所有这些数值都是同时显示在一个屏幕上的。PTS2600的机箱采用高标准的铝质材料制成,各模块安装在下方有钢板支承的母板上。模块相对独立,维修方便,主要通过更换模块进行。 我国利用相检宽带测频技术设计的高精度频率计也非常具有突破性和实用性。该项新技术及仪器是针对已有测频技术的特点及存在问题,推出完全新颖的检测精度高、便于实施且设备构成又比较经济的一种新技术及仪器。
被测信号经放大整形电路变成计数器所要求的脉冲信号,其频率与被测信号的频率相同。当1s信号来到时,被测脉冲信号进入芯片相关的,计数器开始计数,直到1s信号结束时,停止计数。若在1s时间内计数器计得的脉冲数为N,则被测信号频率fX?Nhz。
嵌入式系统实验报告_2

嵌入式系统设计实验报告班级:学号:姓名:成绩:指导教师:1. 实验一1.1 实验名称博创UP-3000实验台基本结构及使用方法1.2 实验目的1.学习嵌入式系统开发流程。
2.熟悉UP-net3000实验平台的核心硬件电路和外设。
3.增加对各个外设的了解,为今后各个接口实验打下基础。
1.3 实验环境博创UP-NETARM3000 嵌入式开发平台1.4 实验内容及要求(1)嵌入式系统开发流程概述(2)熟悉UP-net3000实验平台的核心硬件电路和外设(3)ARM JTAG的安装与使用(4)通过操作系统自带的通讯软件超级终端,检验各个外设的工作状态(5)通过本次课程对各个外设的了解,为今后各个接口实验打下基础1.5 实验设计与实验步骤1.硬件安装2.软件安装(1)超级终端:运行Windows 系统下的超级终端(HyperTerminal)应用程序,新建一个通信终端;在接下来的对话框中选择 ARM开发平台实际连接的PC机串口;完成新建超级终端的设置以后,可以选择超级终端文件菜单中的保存,将当前设置保存为一个特定超级终端到桌面上,以备后用。
(2)JTAG 驱动程序的安装:执行armJtag目录下armJtagSetup.exe程序,选择安装目录,安装 JTAG 软件。
1.6 实验过程与分析(1)了解嵌入式系统开发流程(2)对硬件的安装(3)对软件的安装1.7 实验结果总结通过本次实验对嵌入式系统开发流程进行了了解,并且对硬件环境和软件环境进行了安装配置,通过本次实验对以后的接口实验打了基础。
1.8 心得体会通过本次实验对嵌入式实验有了初步的了解,对基本开发流程也有了初步的了解。
2. 实验二2.1 实验名称ADS1.2软件开发环境使用方法2.2 实验目的熟悉ADS1.2开发环境,学会 ARM仿真器的使用。
使用 ADS 编译、下载、调试并跟踪一段已有的程序,了解嵌入式开发的基本思想和过程。
2.3 实验环境(1)ADS1.2开发环境(2)博创UP-NETARM3000 嵌入式开发平台(3)PC(4)串口线2.4 实验内容及要求本次实验使用ADS 集成开发环境,新建一个简单的工程文件,并编译这个工程文件。
嵌入式系统实验报告

嵌入式系统实验报告姓名:班级:学号:实验一:流水灯实验要求:编写一个程序,是开发板上的的3个LED灯按流水灯方式闪烁。
实验工具:ADSv1.2,超级终端,DNW.exe,MY-2440开发板,电脑实验程序如下:;汇编指令实验;定义端口E寄存器预定义rGPBCON EQU 0x56000010rGPBDAT EQU 0x56000014rGPBUP EQU 0x56000018AREA Init,CODE,READONLY ;该伪指令定义了一个代码段,段名为Init,属性只读ENTRY ;程序的入口点标识ResetEntry;下面这三条语句,主要是用来设置I/O口GPB5、GPB6、GPB7为输出属性ldr r0,=rGPBCON ;将寄存器rPCONB的地址存放到寄存器r0中ldr r1,=0x5400str r1,[r0] ;将r1中的数据存放到寄存器rPCONB中;下面这三条语句,主要是禁止GPB端口的上拉电阻ldr r0,=rGPBUPldr r1,=0xffffstr r1,[r0]ldr r2,=rGPBDAT ;将数据端口B的数据寄存器的地址附给寄存器r2ledloopldr r1,=0xdfstr r1,[r2] ;使GPB5输出低电平,LED1亮bl delay ;调用延迟子程序ldr r1,=0xbfstr r1,[r2] ;使GPB5输出低电平,LED1亮bl delay ;调用延迟子程序ldr r1,=0x7fstr r1,[r2] ;使GPB5输出低电平,LED1亮bl delay ;调用延迟子程序b ledloop;下面是延迟子程序delayldr r3,=0xbffff ;设置延迟的时间delay1sub r3,r3,#1 ;r3=r3-1cmp r3,#0x0 ;将r3的值与0相比较bne delay1 ;比较的结果不为0(r3不为0),继续调用delay1,否则执行下一条语句mov pc,lr ;返回END ;程序结束符实验程序说明:要实现三个LED闪烁,须设置GPB5、GPB6、GPB7为输出属性,所以“ldr r1,=0x5400”,将r1的地址设置为0x5400。
嵌入式教学实践报告(3篇)
第1篇一、引言随着信息技术的飞速发展,嵌入式系统在各个领域得到了广泛的应用。
为了培养适应社会需求的高素质人才,我国高校纷纷开展嵌入式教学。
本文以某高校嵌入式教学实践为例,分析嵌入式教学的现状、方法及成效,以期为我国嵌入式教学提供参考。
二、嵌入式教学现状1. 课程设置目前,我国高校嵌入式课程设置主要包括嵌入式系统原理、嵌入式系统设计、嵌入式Linux、嵌入式编程等。
这些课程旨在使学生掌握嵌入式系统的基本原理、设计方法、编程技巧和开发工具。
2. 教学方法(1)理论教学:通过课堂讲授、案例分析等方式,使学生掌握嵌入式系统的基本概念、原理和设计方法。
(2)实践教学:通过实验、项目实践等环节,提高学生的动手能力和工程实践能力。
(3)线上教学:利用网络平台,为学生提供在线课程、在线实验、在线讨论等资源。
3. 教学资源(1)教材:高校普遍采用国内外优秀的嵌入式教材,如《嵌入式系统原理与应用》、《嵌入式Linux编程》等。
(2)实验设备:高校普遍配备嵌入式实验箱、开发板等实验设备,为学生提供实践平台。
(3)在线资源:高校积极建设在线教学资源,为学生提供丰富的学习资料。
三、嵌入式教学方法探讨1. 案例教学法案例教学法通过分析实际嵌入式系统项目,引导学生掌握嵌入式系统设计、开发和应用方法。
具体步骤如下:(1)选择典型案例:根据教学目标,选择具有代表性的嵌入式系统项目。
(2)分析案例:引导学生分析案例中嵌入式系统的设计思路、关键技术、开发过程等。
(3)讨论与总结:组织学生进行讨论,总结案例中的经验和教训。
2. 项目驱动教学法项目驱动教学法以项目为导向,让学生在完成项目的过程中,掌握嵌入式系统设计、开发和应用技能。
具体步骤如下:(1)确定项目:根据学生的兴趣和市场需求,确定嵌入式系统项目。
(2)项目分解:将项目分解为若干个子任务,明确每个子任务的技术要求和完成时间。
(3)分工与合作:学生分组,明确每个组员的责任,共同完成项目。
嵌入式操作系统实验报告

一、实验目的1. 了解嵌入式操作系统的基本概念和特点;2. 掌握嵌入式操作系统的基本开发流程和工具;3. 学习嵌入式操作系统的内核模块设计和调试方法;4. 熟悉实时操作系统(RTOS)的调度策略和同步机制。
二、实验环境1. 开发板:STM32F103C8T6;2. 开发工具:Keil uVision5;3. 操作系统:Linux;4. 实验内容:基于uc/OS-II实时操作系统进行嵌入式系统开发。
三、实验步骤1. 熟悉开发环境和工具(1)安装Keil uVision5,创建新的项目;(2)下载uc/OS-II源码,并将其添加到项目中;(3)学习Keil uVision5的基本操作,如编译、调试等。
2. 学习uc/OS-II实时操作系统(1)了解uc/OS-II的版本、特点和适用场景;(2)学习uc/OS-II的内核模块,如任务管理、内存管理、中断管理等;(3)熟悉uc/OS-II的调度策略和同步机制。
3. 设计实验任务(1)设计一个简单的嵌入式系统,实现以下功能:a. 初始化uc/OS-II实时操作系统;b. 创建多个任务,实现任务间的同步与通信;c. 实现任务调度,观察任务的执行顺序;d. 实现任务优先级管理,观察任务优先级的变化;e. 实现任务延时,观察延时效果;(2)根据实验要求,编写相应的C语言代码。
4. 编译与调试(1)使用Keil uVision5编译实验项目,生成可执行文件;(2)将可执行文件烧录到开发板上;(3)使用调试工具(如J-Link)进行调试,观察实验结果。
5. 分析与总结(1)分析实验过程中遇到的问题及解决方法;(2)总结uc/OS-II实时操作系统的特点和应用场景;(3)总结嵌入式系统开发的经验和技巧。
四、实验结果与分析1. 实验结果(1)成功初始化uc/OS-II实时操作系统;(2)创建多个任务,实现任务间的同步与通信;(3)实现任务调度,观察任务的执行顺序;(4)实现任务优先级管理,观察任务优先级的变化;(5)实现任务延时,观察延时效果。
嵌入式系统实验报告
嵌入式系统实验报告一、实验目的本次嵌入式系统实验的主要目的是深入了解嵌入式系统的基本原理和开发流程,通过实际操作和项目实践,提高对嵌入式系统的设计、编程和调试能力。
二、实验设备与环境1、硬件设备嵌入式开发板:_____计算机:_____调试工具:_____2、软件环境操作系统:_____开发工具:_____编译环境:_____三、实验内容1、基础实验熟悉开发板的硬件结构和接口,包括处理器、存储器、输入输出端口等。
学习使用开发工具进行程序编写、编译和下载。
2、中断实验了解中断的概念和工作原理。
编写中断处理程序,实现对外部中断的响应和处理。
3、定时器实验掌握定时器的配置和使用方法。
利用定时器实现定时功能,如周期性闪烁 LED 灯。
4、串口通信实验学习串口通信的协议和编程方法。
实现开发板与计算机之间的串口数据传输。
5、 ADC 转换实验了解 ADC 转换的原理和过程。
编写程序读取 ADC 转换结果,并进行数据处理和显示。
四、实验步骤1、基础实验连接开发板与计算机,打开开发工具。
创建新的项目,选择合适的芯片型号和编译选项。
编写简单的程序,如控制 LED 灯的亮灭,编译并下载到开发板上进行运行和调试。
2、中断实验配置中断相关的寄存器,设置中断触发方式和优先级。
编写中断服务函数,在函数中实现相应的处理逻辑。
连接外部中断源,观察中断的触发和响应情况。
3、定时器实验初始化定时器相关的寄存器,设置定时器的工作模式和定时周期。
在主程序中启动定时器,并通过中断或查询方式获取定时时间到达的标志。
根据定时标志控制 LED 灯的闪烁频率。
4、串口通信实验配置串口相关的寄存器,设置波特率、数据位、停止位等参数。
编写发送和接收数据的程序,实现开发板与计算机之间的双向通信。
使用串口调试助手在计算机上进行数据收发测试。
5、 ADC 转换实验配置 ADC 模块的相关寄存器,选择输入通道和转换精度。
启动 ADC 转换,并通过查询或中断方式获取转换结果。
嵌入式系统实训报告范文3篇
嵌入式系统实训报告范文嵌入式系统实训报告范文精选3篇(一)以下是一份嵌入式系统实训报告范文,供参考:实训报告课程名称:嵌入式系统实训姓名:XXX学号:XXXX日期:XXXX年XX月XX日一、实训目的和背景嵌入式系统是一种专门用于控制和执行特定任务的计算机系统。
本次实训旨在通过设计、搭建并测试一个简单的嵌入式系统,帮助学生理解嵌入式系统的根本原理和应用,并提供理论时机来加深对嵌入式系统的理解和应用才能。
二、实训内容1. 系统设计本实训的目的是设计一个简单的温度监测系统。
该系统包括一个传感器用于检测环境温度,并将温度值传输到单片机上进展处理。
单片机再将处理后的数据显示在LCD屏幕上。
2. 硬件搭建根据系统设计,我们首先需要准备以下硬件器件:传感器、单片机、LCD屏幕、电等。
实际搭建时,我们按照电路图连接各个硬件器件,并进展电接入和信号连接的测试。
3. 软件编程完成硬件搭建后,接下来需要进展软件编程。
我们使用C语言来编写嵌入式系统的程序。
主要编程内容包括读取传感器数据、对数据进展处理和计算、将计算结果显示在LCD屏幕上等。
4. 系统测试完成软件编程后,我们进展系统测试。
主要测试内容包括:检测传感器是否能准确读取温度数据、单片机是否能正确处理数据、LCD屏幕是否正常显示等。
通过测试,可以评估系统的稳定性和可靠性。
三、实训收获通过参与本次实训,我收获了以下几点:1. 对嵌入式系统的理解更加深化:通过实操,我对嵌入式系统的原理和应用有了更深化的理解。
2. 掌握了硬件搭建和连接的技能:我学会了如何搭建和连接硬件器件,进步了理论操作才能。
3. 锻炼了软件编程才能:通过编写嵌入式系统的程序,我熟悉了C语言的应用,并提升了编程才能。
4. 增加了问题解决才能:在搭建和编程过程中,遇到了一些困难和问题,通过不断调试和学习,我学会了如何解决问题和排除故障。
综上所述,本次嵌入式系统实训对于进步我的理论操作才能、编程才能和问题解决才能具有重要意义。
嵌入式系统实验报告1
LINUX操作实验报告一实验要求:1、程序设计思想要阐述清楚;2、要有流程图和源代码及注释;3、要有仿真结果及说明。
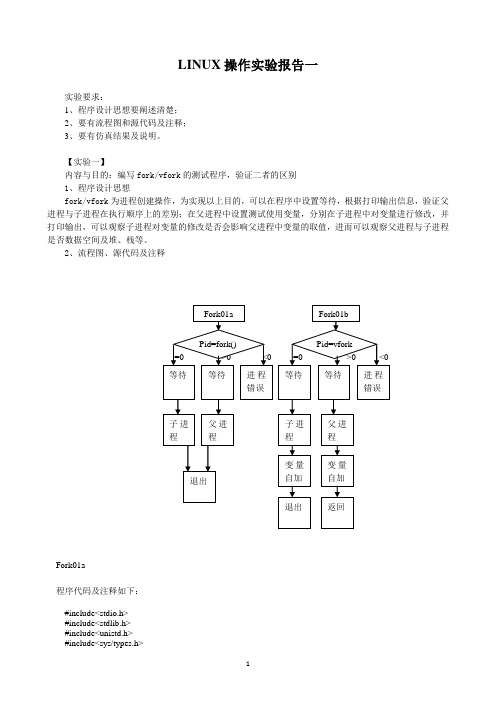
【实验一】内容与目的:编写fork/vfork的测试程序,验证二者的区别1、程序设计思想fork/vfork为进程创建操作,为实现以上目的,可以在程序中设置等待,根据打印输出信息,验证父进程与子进程在执行顺序上的差别;在父进程中设置测试使用变量,分别在子进程中对变量进行修改,并打印输出,可以观察子进程对变量的修改是否会影响父进程中变量的取值,进而可以观察父进程与子进程是否数据空间及堆、栈等。
2、流程图、源代码及注释Fork01a程序代码及注释如下:#include<stdio.h>#include<stdlib.h>#include<unistd.h>int global=1; //设定参数初始值int main(void){int var=2;pid_t pid; //显示两个参数初始值printf("The original values:global=%d,var=%d\n",global,var);if((pid=fork())<0) //如果进程号小于0,显示出错{printf("for error\n");}else if(pid==0) //如果处于子进程,显示所处进程,并修改各变量{sleep(10); //(设置等待时间:S)global++;var++;printf("In child process\n");}else //如果处于父进程,显示所处进程和各变量{sleep(5);printf("In parent process\n");}printf("pid=%d,global=%d,var=%d\n",getpid(),global,var);exit(0);}运行结果:若变换等待时间如下:#include<stdio.h>#include<stdlib.h>#include<unistd.h>#include<sys/types.h>int global=1; //设定参数初始值int main(void){int var=2;pid_t pid; //显示两个参数初始值printf("The original values:global=%d,var=%d\n",global,var);if((pid=fork())<0) //如果进程号小于0,显示出错{printf("for error\n");}else if(pid==0) //如果处于子进程,显示所处进程,并修改各变量{sleep(5); //(设置等待时间:S)global++;}else //如果处于父进程,显示所处进程和各变量{sleep(10);printf("In parent process\n");}printf("pid=%d,global=%d,var=%d\n",getpid(),global,var);exit(0);}Fork01b程序代码及注释如下:#include<stdio.h>#include<stdlib.h>#include<unistd.h>#include<sys/types.h>int global=1; //设定参数初始值int main(void){int var=2;pid_t pid; //显示各参数值printf("The original values:global=%d,var=%d\n",global,var);if((pid=vfork())<0) //如果进程号小于0,报错{printf("vfork error\n");}else if(pid==0) //如果处于子进程,设定等待时间,修改各参数值,显示进程状态和参数值,返回{sleep(3);global++;var++;printf("In child process\n");printf("pid=%d,global=%d,var=%d\n",getpid(),global,var);printf("child process ended\n");} //如果处于父进程,设定等待时间,修改各参数值,显示进程状态和参数值,返回else{sleep(1);printf("In parent process\n");global++;var++;}printf("pid=%d,global=%d,var=%d\n",getpid(),global,var);printf("parent process ended\n");exit(0);}运行结果如下:若变换等待时间如下:#include<stdio.h>#include<stdlib.h>#include<unistd.h>#include<sys/types.h>int global=1; //设定参数初始值int main(void){int var=2;pid_t pid; //显示各参数值printf("The original values:global=%d,var=%d\n",global,var);if((pid=vfork())<0) //如果进程号小于0,报错{printf("vfork error\n");}else if(pid==0) //如果处于子进程,设定等待时间,修改各参数值,显示进程状态和参数值,返回{global++;var++;printf("In child process\n");printf("pid=%d,global=%d,var=%d\n",getpid(),global,var);printf("child process ended\n");_exit(0);} //如果处于父进程,设定等待时间,修改各参数值,显示进程状态和参数值,返回else{sleep(3;printf("In parent process\n");global++;var++;}printf("pid=%d,global=%d,var=%d\n",getpid(),global,var);printf("parent process ended\n");exit(0);}运行结果如下:3、仿真结果及说明由fork01a和fork01b的两个等待时间情况下的打印结果可以看出,fork对于子进程与父进程执行的先后顺序没有要求,且在父进程先于子进程退出以后,程序无法正常退出,而vfork要求先执行子进程,后执行父进程。
嵌入式实习报告6篇

嵌入式实习报告6篇嵌入式实习报告篇1此次设计我们采用以LM3S2100为微控制器,并通过硬件和软件两方面设计,结合6位LED数码管,放大整形电路,来实现频率计在嵌入式系统中的开发与应用。
本次课程设计其主要目的是通过这学期所学的ARM知识,来实现频率计的功能,本次设计我们利用了定时计数器的功能,对输入的信号进行实时的、高精度的频率测量,并通过6位LED数码显示管显示测量结果。
论文中阐述了相关的硬件原理与应用方案,并在此基础上叙述了软件设计最终结合硬件和软件完成了本次设计。
关键词:LM3S2100、频率计、LED数码显示管1绪论频率计是计算机、通讯设备、音频视频等科研生产领域不可缺少的测量仪器。
它是一种用十进制数字显示被测信号频率的数字测量仪器。
它的基本功能是测量正弦信号,方波信号及其他各种单位时间内变化的物理量。
在进行模拟、数字电路的设计、安装、调试过程中,由于其使用十进制数显示,测量迅速,精确度高,显示直观,经常要用到频率计。
本频率计将采用定时、计数的方法测量频率。
测量范围在9kHz以下的方波,时基宽度为1us,10us,100us,1ms。
用ARM芯片实现自动测量功能。
基本设计原理是直接用十进制数字显示被测信号频率的一种测量装置。
它以测量周期的方法对方波的频率进行自动的测量。
1.1本次设计任务一.设计题目:ARM为内核的频率计二.主要功能:用ARM的定时器/计数器的定时和计数功能,外部扩展6位数码管,要求累计每秒进入ARM的外部脉冲个数,用LED数码管显示出来,或是用上位机显示。
三.设计要求:用protel画出最小系统和外围扩展电路。
显示部分可用LED数码管或是上位机显示。
要求小组成员分工明确。
1.2设计基本原理所谓频率,就是周期性信号在单位时间(1s)内变化的次数,若在一定时间间隔T内测得这个周期性信号的重复变化次数为N,则其频率可表示为被测信号经放大整形电路变成计数器所要求的脉冲信号,其频率与被测信号的频率相同。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
嵌入式系统实验报告文件排版存档编号:[UYTR-OUPT28-KBNTL98-UYNN208]大连理工大学本科实验报告课程名称:嵌入式系统实验学院(系):电子信息与电气工程学部专业:自动化班级: 0804学号:学生姓名:何韬2011年 11月 18日大连理工大学实验报告学院(系):电信专业:自动化班级: 0804 姓名:何韬学号:组: ___实验时间: 2011-11-12 实验室: d108 实验台:指导教师签字:成绩:实验二ARM的串行口实验一、实验目的和要求见预习报告二、实验原理和内容见预习报告三、主要仪器设备硬件:ARM嵌入式开发平台、用于ARM7TDMI 的JTAG 仿真器、PC机Pentium100 以上、串口线。
软件:PC 机操作系统win98、Win2000 或WinXP 、ARM SDT 或集成开发环境、仿真器驱动程序、超级终端通讯程序。
四、实验步骤见预习报告五、核心代码在主函数中实现将从串口0接收到的数据发送到串口0()int main(void){char c1[1];char err;ARMTargetInit(); 通过调用OSTaskCreate()或OSTaskCreateExt()创建至少一个任务;.OSStart(); /ucos-ii/" /* uC/OS interface */#include "../ucos-ii/add/"#include "../inc/"#include "../inc/sys/"#include "../src/gui/"#include <>#include <>#pragma import(__use_no_semihosting_swi) .\n");.\n");.\n");于task2 挂起时间为3 秒,所以在task2 挂起期间task1 能执行两次,而当第三次时由于task1 与task2 同时处于就绪态,由优先级次序,还是先执行task1 在执行task2.然后就这样周而复始的循环下去。
为验证ucos 的强实时性,可以去掉task2()的“OSTimeDly(3000);”然后令task1()中的“OSTimeDly(1000);”改为“OSTimeDly(10);”。
观察到的实验现象是在超级终端上显示被“run task1”打断的”“ run task2”,反之把task1和task2 的优先级交换则在超级终端上只显示“run task2”。
这说明ucos 的强实时性得到了验证,因为在任何时候只要高优先级的任务都可以打断正在执行的低优先级任务,反之低优先级任务却不可打断正在执行的高优先级的任务。
七、实验心得该实验使我了解了uCOS-II 内核的主要结构,对所学知识有了加深刻的理解和认识,基本掌握了将uCOS-II 内核移植到ARM920T 处理器上的方法,能够正确完成基本操作得出正确结果。
大连理工大学实验预习报告学院(系):电信专业:自动化班级: 0804 姓名:何韬学号:组: ___实验时间: 2011-11-12 实验室: d108 实验台:指导教师签字:成绩:实验二ARM的串行口实验一、实验目的和要求1.掌握ARM 的串行口工作原理。
2.学习编程实现ARM 的UART 通讯。
3.掌握CPU 利用串口通讯的方法。
二、实验原理和内容实验原理:1.硬件电路图核心板电路接口:硬件电路图—MAX3232:接口连线:2.异步串行I/O异步串行方式是将传输数据的每个字符一位接一位(例如先低位、后高位)地传送。
数据的各不同位可以分时使用同一传输通道,因此串行I/O 可以减少信号连线,最少用一对线即可进行。
接收方对于同一根线上一连串的数字信号,首先要分割成位,再按位组成字符。
为了恢复发送的信息,双方必须协调工作。
在微型计算机中大量使用异步串行I/O 方式,双方使用各自的时钟信号,而且允许时钟频率有一定误差,因此实现较容易。
但是由于每个字符都要独立确定起始和结束(即每个字符都要重新同步),字符和字符间还可能有长度不定的空闲时间,因此效率较低。
图2-1 串行通信字符格式图2-1 给出异步串行通信中一个字符的传送格式。
开始前,线路处于空闲状态,送出连续“1”。
传送开始时首先发一个“0” 作为起始位,然后出现在通信线上的是字符的二进制编码数据。
每个字符的数据位长可以约定为5 位、6 位、7 位或8 位,一般采用ASCII 编码。
后面是奇偶校验位,根据约定,用奇偶校验位将所传字符中为“1”的位数凑成奇数个或偶数个。
也可以约定不要奇偶校验,这样就取消奇偶校验位。
最后是表示停止位的“1” 信号,这个停止位可以约定持续1 位、位或2 位的时间宽度。
至此一个字符传送完毕,线路又进入空闲,持续为“1”。
经过一段随机的时间后,下一个字符开始传送才又发出起始位。
每一个数据位的宽度等于传送波特率的倒数。
微机异步串行通信中,常用的波特率为50,95,110,150,300,600,1200,2400,4800,9600,119200 等。
接收方按约定的格式接收数据,并进行检查,可以查出以下三种错误: 1)奇偶错:在约定奇偶检查的情况下,接收到的字符奇偶状态和约定不符。
2)帧格式错:一个字符从起始位到停止位的总位数不对。
3)溢出错:若先接收的字符尚未被微机读取,后面的字符又传送过来,则产生溢出错。
每一种错误都会给出相应的出错信息,提示用户处理。
3.ARM 自带的串行口寄存器ARM 自带两个串行口,各带有16 字节的F IFO(先入先出寄存器),最大波特率。
每个UART 有7 种状态:溢出错误、校验错误、帧错误、暂停态、接收缓冲区准备好、发送缓冲区空、发送移位缓冲器空,这些状态可以由相应的UTRSTATn/UERSTATn 表示,并且与发送接收缓冲区相对应的有错误缓冲区。
波特率的可以通过控制波特率寄存器(UBRDIVn )控制。
与UART 有关的寄存器主要有以下几个:(1)UART 线性控制寄存器ULCONn该寄存器的第6 位决定是否使用红外摸式,位5~3 决定校验方式,位2 决定停止位长度,位1 和0决定每帧的数据位数。
参考:普通模式,无奇偶校验,1位停止位,8为数据长度。
(2)UART 控制寄存器UCONn,该寄存器决定UART 的各种摸式。
UART FIFO控制寄存器UFCONn,UART MODEM 控制寄存器,分别决定UART FIFO 和MODEM 的模式。
其中UFCONn 的第0 位决定是否启用FIFO,UMCONn 的第0 位是请求发送位,对我们来说是比较重要的。
参考:Tx电平触发,Rx边沿触发,禁止接收超时中断,允许接收错误中断,发送和接受模式均为01。
(3)读写状态寄存器UTRSTAT 以及错误状态寄存UERSTAT,可以反映芯片目前的读写状态以及错误类型。
FIFO 状态寄存器UFSTAT 和MODEM 状态寄存器UMSTAT,通过前者可以读出目前FIFO 是否满以及其中的字节数;通过后者可以读出目前MODEM 的CTS 状态。
(4)发送寄存器UTXH 和接收寄存器URXH,这两个寄存器存放着发送和接收的数据,当然只有一个字节8位数据。
需要注意的是在发生溢出错误的时候,接收的数据必须要被读出来,否则会引发下次溢出错误。
(5)最后是波特率引子寄存器UBRDIV。
该寄存器为十六位,算法参见上页的部分。
计算公式如下:UBRDIVn = (round_off)(MCLK/(bps × 16) ) -1其中MCLK 是系统频率,例如在40MHz 的情况下,当波特率取115200 时,× 16)+ ) -1= (int)+ -1= 22 -1 = 21注意:由于ARM 工作时存在小端和大端两种工作模式,所以同样一个寄存器在不同模式时地址也不一样,需要加以区别。
实验内容:学习串行通讯原理,了解串行通讯控制器,阅读ARM 芯片文档,掌握ARM 的UART 相关寄存器的功能,熟悉ARM 系统硬件的UART 相关接口。
编程实现ARM 和计算机实现串行通讯:ARM 监视串行口,将接收到的字符再发送给串口(计算机与开发平台是通过超级终端通讯的),即按PC 键盘通过超级终端发送数据,开发平台将接收到的数据再返送给PC,在超级终端上显示。
三、实验步骤1.新建工程,将“Exp2 ARM 串口实验”中的文件添加到工程中,这些是启动时所需要的文件。
2.定义与UART 有关的各个寄存器地址和一些特殊的位命令。
主要有以下各寄存器():/* UART 的全部功能寄存器 */#define rULCON0 (*(volatile unsigned *)0x1d00000)#define rULCON1 (*(volatile unsigned *)0x1d04000)#define rUCON0 (*(volatile unsigned *)0x1d00004)#define rUCON1 (*(volatile unsigned *)0x1d04004)#define rUFCON0 (*(volatile unsigned *)0x1d00008)#define rUFCON1 (*(volatile unsigned *)0x1d04008)#define rUMCON0 (*(volatile unsigned *)0x1d0000c)#define rUMCON1 (*(volatile unsigned *)0x1d0400c)#define rUTRSTAT0 (*(volatile unsigned *)0x1d00010)#define rUTRSTAT1 (*(volatile unsigned *)0x1d04010)#define rUERSTAT0 (*(volatile unsigned *)0x1d00014)#define rUERSTAT1 (*(volatile unsigned *)0x1d04014)#define rUFSTAT0 (*(volatile unsigned *)0x1d00018)#define rUFSTAT1 (*(volatile unsigned *)0x1d04018)#define rUMSTAT0 (*(volatile unsigned *)0x1d0001c)#define rUMSTAT1 (*(volatile unsigned *)0x1d0401c)#define rUBRDIV0 (*(volatile unsigned *)0x1d00028)#define rUBRDIV1 (*(volatile unsigned *)0x1d04028)#ifdef __BIG_ENDIAN 译并下载移植后的uCOS-II所有的源代码都准备好后就可以进行编译了。