小型仿人机器人脚底传感系统的设计与实现
小型仿人机器人脚底传感系统的设计与实现

摘 要: 针对小型仿入机器人的零力矩点 z ) (MP轨迹在线确定问题, 设计了一种基于多个简单一维力/ 力矩传感器的脚
底传感阵列系统以及一种距离可调的多孔、 双夹板机构, 用以安装;/ 矩传感器, D; D 并实 了 现 脚底传感器信号多级放大 及采集软硬件系统。 应用c N A 总线接 口 实现了与外部上层控制器的通信。 实现了小型仿人机器人行走过程 中 实际 轨迹的 在线计算 和实时 传递。实验结果证明, 该传感系统能够有效地完成脚底力信息的实时采集、计算与通讯。 关键词 :小型仿人机器人;零力矩点; 力矩传感器 力/ 中图分类号 :T 2 2 P4. 6 文献标 志码 :A 文章编号 :17 —7 8 (0 00 —0 5 —6 6 3 102 1)1 0 2
sn o y se c ne e t eyc mpeet era-i o l cin c mp t ga dc mmu iaino tefe f reif r to . e s rs tm a f c v l o i lt h lt e mec l t , e o o ui n o n nc t o fh e t o c n o main
以对机器人进行实时步态规划与控制, 从而实现机器人
Ke r s s lh maod o o ;zr o n o tZ ) oc/ ru nos y wod :ma u n i rb t eom met i (MP ;fr t q e esr l p n eo s 发展趋势。 稳定性检测主要是通过对机器人实际稳定点
微小型双足爬壁机器人足部传感系统设计

0 引 言
速获取吸附面 和吸盘 的相对 位置 信息 , 以实 现可靠 吸附。
图 1所示为五 自由度气吸 附微小型双足爬壁机器人的足部 三维 图, 足上安装有 1个真空泵 和 1个真空阀 , 足下是 1个
微小型爬壁机 器人 在 民用 和军 用方 面都 有广 阔 的前
景。它可以进入狭窄的工业 管道进行检 测和维修 , 对建 筑
面的平行程度 ; 吸盘旁边安装 2路光纤曲率传感器 , 用来精 确判 断吸盘和吸附面的接触情况 ; 足部 内装有气压传感器, 用来检测吸盘 内真空 度 , 以确定 吸盘 的吸 附状态 ; 主控电
路、 加速度计 、 滤波器 等其他 电路 均封 装在 足部 内部 。此 外, 足上还安装有红外测 距传感 器 、 无线摄像 头 , 以获得多 种环 境信息 。
a e r aie a d g a in fte a s r ln so ti e . r e l d, n r de to d ob pa e i ban d z h Ke r s ci i g r b t b o b b d vc ;s n ig s se y wo d : l mb n o o ;a s r s e ie e sn y tm
Ab t a t C p l r ya s r e h u d t n i h v me t f h l i gr b tT es n i gs se o s r c : u ue f ml d o b d i te f n ai n t e mo e n ec i n o. h e sn y tm n i s o o ot mb o
维普资讯
20 0 7年 第 2 6卷 第 1 2期
) t > 》
传感 器与微系统 ( rnd cr n ir Yt eh o ge) Tasue dM c s r T cnl is a o e n o
小型舞蹈双足机器人的设计及实现

小型舞蹈双足机器人的设计及实现随着科技的发展,机器人在现代社会扮演着越来越重要的角色。
舞蹈机器人作为人工智能领域的一项重要研究课题,具有很高的应用价值和研究意义。
本文将介绍一个小型舞蹈双足机器人的设计及实现。
我们需要确定机器人的外形和尺寸。
考虑到实用性和可行性,我们选择设计一个小型舞蹈双足机器人。
机器人的身高约为30厘米,重量约为1千克,这样既方便携带又容易控制。
接下来,我们需要确定机器人的机械结构。
双足机器人的机械结构主要包括机身、双足和关节。
机身可以采用一种轻质材料制作,如碳纤维,以提高机器人的灵活性和稳定性。
双足可以使用橡胶或塑料材料制作,以增加机器人在舞蹈中的灵活性和摆动范围。
关节可以采用电机和齿轮传动结构设计,使机器人的动作更加精确和流畅。
然后,我们需要确定机器人的动力系统。
机器人的动力系统主要包括电源和电机。
电源可以选择锂电池或可充电电池,以提供足够的电能支持机器人的运动。
电机可以选择直流电机或步进电机,根据需要选择合适的电机类型并将其安装在机器人的关节部位。
接下来,我们需要确定机器人的传感器系统。
传感器系统可以用于检测机器人的自身状态和环境变化。
通过加速度传感器和陀螺仪可以检测机器人的倾斜角度和转动速度;通过距离传感器可以检测机器人与障碍物的距离。
传感器的数据可以用于控制机器人的运动和调整机器人的姿态。
我们需要确定机器人的控制系统。
控制系统可以包括硬件和软件两个部分。
硬件部分主要包括控制电路和接口电路,用于接收传感器数据和控制电机的运动。
软件部分主要包括机器人的控制算法和编程代码,用于控制机器人的运动和舞蹈动作。
在实际实现过程中,可以使用开源硬件平台如Arduino或Raspberry Pi来搭建机器人的控制系统。
通过编写相应的代码,实现机器人的舞蹈动作控制。
还可以利用三维建模软件和机器人仿真软件进行机器人的设计和预演。
设计和实现一个小型舞蹈双足机器人涉及到机械结构设计、动力系统选择、传感器系统设计和控制系统的建立。
小型舞蹈双足机器人的设计及实现
小型舞蹈双足机器人的设计及实现随着科技的发展,人工智能领域的研究越来越受到人们的关注。
在机器人领域,双足机器人一直备受瞩目,因为它们能够模仿人类的步行方式,并且具有较强的灵活性和稳定性。
在本文中,我们将讨论小型舞蹈双足机器人的设计及实现,探索其在娱乐、教育和科研领域的应用前景。
设计理念小型舞蹈双足机器人的设计理念是基于人类舞蹈的动作,通过对人类舞蹈动作的模仿,实现机器人的舞蹈表演。
这不仅需要机器人具备良好的平衡能力和运动学控制能力,还需要具备较强的舞蹈表现力。
机器人的设计需要考虑以下几个方面:1. 传感器系统:双足机器人需要装备多种传感器,如力觉传感器、惯性传感器和视觉传感器,以便能够感知周围环境和实现自身的平衡控制。
2. 动作规划:机器人需要具备良好的动作规划能力,能够根据舞蹈的音乐节奏和节拍,生成相应的舞蹈动作序列。
4. 舞蹈表现力:机器人的外形设计和舞蹈动作需要具有一定的艺术性和表现力,以便能够吸引观众的注意力。
实现方法为了实现小型舞蹈双足机器人的设计理念,我们可以采用以下具体的实现方法:1. 结构设计:需要设计出合适的机器人结构,包括骨架结构、传动机构和外部装甲。
在结构设计中,需要考虑机器人的重量、稳定性和舞蹈表现力。
3. 控制系统:机器人的控制系统需要集成运动规划、运动学控制和传感器数据处理等多种功能,以实现机器人舞蹈动作的精确控制。
4. 舞蹈动作生成:通过对人类舞蹈动作的分析和建模,可以生成机器人舞蹈动作的序列。
这一过程需要考虑节奏和音乐的影响,以保证舞蹈动作与音乐相匹配。
应用前景小型舞蹈双足机器人具有广阔的应用前景,可以在娱乐、教育和科研领域发挥重要作用。
1. 娱乐应用:小型舞蹈双足机器人可以用于舞蹈表演,成为各种娱乐节目的表演嘉宾,为观众带来新奇的视听享受。
2. 教育应用:通过机器人舞蹈表演,可以吸引孩子们对科学和技术产生兴趣,激发他们学习的热情,促进科学素养的提高。
3. 科研应用:小型舞蹈双足机器人具有独特的动作规划和运动控制特性,可以为人类行为学和运动控制的研究提供新的实验平台和研究对象。
仿生机器人系统的设计与实现

仿生机器人系统的设计与实现近年来,随着科技的发展,仿生机器人技术逐渐走进人们的视野。
仿生机器人是指模仿动物神经系统、形态结构、行动方式等设计的机械装置,能够完成类似于生物的感知、行动、学习等能力。
仿生机器人可以应用于很多领域,例如医疗、救援、军事等。
本文旨在介绍仿生机器人系统的设计与实现。
一、系统框架仿生机器人系统是一个由多个子系统组成的复杂系统。
其框架包括感知系统、神经系统和运动系统。
感知系统主要负责感知外界环境信息,并将这些信息传递给神经系统进行处理。
感知系统包括视觉系统、听觉系统、触觉系统等子系统。
神经系统主要负责处理来自感知系统传递过来的信息,并控制机器人的行动。
神经系统包括中枢神经系统和周边神经系统。
中枢神经系统类似于大脑,是信息处理的核心,控制着机器人的行为。
周边神经系统负责传递信息到各个运动器官,使机器人进行具体的动作。
运动系统主要负责机器人的运动控制。
运动系统包括肌肉系统、关节系统、运动控制系统等子系统。
二、感知系统设计视觉系统的设计是仿生机器人系统中最常见的设计之一。
视觉系统主要是利用摄像头来捕捉图像,然后对图像进行预处理、特征提取和图像分类等操作。
预处理可以包括照片去噪、图像灰度化、二值化等。
特征提取可能使用像素值、边缘、直线等特征。
分类可用于决定物体是否存在、什么类型的物体等。
听觉系统的设计也是仿生机器人系统中的一个重要方面。
听觉系统主要是利用麦克风来捕捉声音,然后对声音进行分析和特征提取。
对于每个声音,都可以提取出频率、时间、音量等特征。
利用这些特征,机器人可以识别语言、声音来源等。
触觉系统的设计是仿生机器人系统中的另一个重要方面。
机器人的触觉系统可以用压力传感器或力传感器等来实现。
通过触觉系统,机器人可以感知环境的物理属性,例如温度、湿度、形状等。
三、神经系统设计神经系统的设计主要是模拟生物的神经网络,使用深度学习等技术进行构建。
对于每个感知子系统,都需要有相应的神经网络来进行数据处理和决策。
小型舞蹈双足机器人的设计及实现

小型舞蹈双足机器人的设计及实现一、设计目标小型舞蹈双足机器人的设计目标是实现优雅、灵动的舞蹈动作。
通过机器人的动作表达,让观众感受到机器人的舞蹈艺术,并与观众产生共鸣。
二、系统架构小型舞蹈双足机器人的系统架构主要包括硬件系统和软件系统两部分。
硬件系统:1. 双足机器人的身体结构,由头部、颈部、躯干、双臂和双腿构成。
身体结构要求轻巧、均衡,以便机器人能够完成各种舞蹈动作。
2. 传感器模块,包括陀螺仪、加速度计等,用于检测机器人的姿态和运动状态。
3. 动力系统,由电机、减速器等组成,实现机器人的运动驱动。
软件系统:1. 运动规划算法,通过分析舞蹈动作的细节,确定机器人的运动轨迹和姿态变化。
2. 实时控制系统,通过控制机器人的动力系统,实现舞蹈动作的执行。
3. 编程界面,提供给用户进行编程,实现自定义的舞蹈动作。
三、关键技术小型舞蹈双足机器人的实现需要解决一些关键技术问题:1. 动作分析与规划根据舞蹈动作的特征和要求,分析舞蹈动作的细节,确定机器人的运动轨迹和姿态变化。
2. 运动控制与同步根据运动规划的结果,通过实时控制系统控制机器人的动力系统,实现舞蹈动作的执行。
需要保证机器人的双足运动的同步性,使机器人的舞蹈动作更加协调。
3. 传感器数据融合通过陀螺仪、加速度计等传感器获取机器人的姿态和运动状态数据,并对数据进行融合处理,以提供给运动控制系统进行实时控制。
4. 用户编程界面舞蹈机器人需要提供给用户一个直观、友好的编程界面,使用户可以根据需要自定义舞蹈动作,并将编程结果上传给机器人进行执行。
四、实现方法小型舞蹈双足机器人的实现方法主要包括以下几个步骤:1. 设计机器人的身体结构,包括头部、颈部、躯干、双臂和双腿等。
根据设计目标,选择轻巧、均衡的材料和结构,使机器人能够完成各种舞蹈动作。
2. 设计传感器模块,包括陀螺仪、加速度计等。
选择合适的传感器,安装在机器人的身体各个部位,以检测机器人的姿态和运动状态。
机器人足底触觉传感器的研究与应用
机器人足底触觉传感器的研究与应用近年来,随着科技的不断发展,机器人逐渐走进人们的生活中。
无论是在工业生产、医疗管理、教育培训还是服务行业,都有机器人的身影。
对于机器人的研发人员来说,如何使机器人更加智能化、更加人性化是一个不断探索的难题。
在这个过程中,足底触觉传感器就成了一个非常重要的研究点。
本文将重点探讨机器人足底触觉传感器的研究与应用。
一、足底触觉传感器的基本概念足底触觉传感器是指安装在机器人脚底部的一种传感器设备,用于传输与记录地面数据信息。
足底触觉传感器一般由多个感应元件组成,这些元件可以感知机器人在地面行走时的受力大小、脚底的接触情况以及地面的情况等信息,并将这些信息传输给机器人的控制系统进行处理,以此指导机器人进行足部姿态调整和运动控制。
二、足底触觉传感器的研究进展随着人工智能技术的日益普及,足底触觉传感器的研究也越来越受关注。
在足底触觉传感器的研究过程中,最常见的方法是利用压敏电阻或者华氏电阻等材料,通过脚底感应,将获得的压力或位移信息转化成电信号,再通过晶体管放大电路和模数转换电路进行处理,最后转化为数字信号,传输到机器人控制器。
目前,足底触觉传感器的研究已经有了一定的进展,一些研究机构和公司已经成功开发了可以模拟人类足底触觉感受的系统。
例如,日本东京大学开发的“柔软脚底传感器”可以更真实地模拟人类脚底的感觉,增加机器人运动控制的真实性和灵活性。
此外,美国麻省理工学院的科学家也研发出机器人“脚掌”传感器,该传感器可以感受不同地面的触感,实现了机器人与环境之间的更好互动。
三、足底触觉传感器的应用足底触觉传感器的应用非常广泛。
首先,在工业自动化领域,足底触觉传感器可以用于机器人的足部姿态调整和运动控制。
其次,在医疗领域中,利用足底触觉传感器可以更好地帮助机器人抓取物体、定位和调整姿势,从而实现更精细的手术和更精密的医疗操作。
再者,在教育培训领域,人形机器人配备足底触觉传感器可以更好地模拟学生不同的行为状态和身体感受,有效提高人形机器人的教学效果。
小型舞蹈双足机器人的设计及实现

小型舞蹈双足机器人的设计及实现随着科技的不断发展和进步,机器人技术也日益成熟,机器人已经被广泛应用于生产制造、医疗保健、军事防务等多个领域。
随着人工智能和运动控制技术的不断推进,双足机器人的研发和应用也越来越引人注目。
双足机器人具有较强的灵活性和适应性,在舞蹈表演、娱乐互动等方面有着广阔的应用前景。
本文将针对小型舞蹈双足机器人的设计及实现进行介绍。
一、设计思路小型舞蹈双足机器人的设计首先需要考虑其外形和结构。
在外形设计上,需要考虑机器人的整体比例和外观美感,让其具有艺术感和观赏性。
在结构设计上,需要考虑机器人的动力系统、传感系统、控制系统等各个方面,确保机器人能够稳定、灵活地进行舞蹈动作。
对于小型舞蹈双足机器人的功能设计,需要考虑其舞蹈表演的需求。
舞蹈动作通常具有一定的节奏和律动感,需要机器人具有较强的动作控制和节奏感知能力。
在功能设计上,需要考虑机器人的动作控制算法、节奏感知传感器等方面,使其能够按照预设的舞蹈节奏和动作进行表演。
对于小型舞蹈双足机器人的材料选择和制作工艺,需要考虑其轻量化和结实耐用。
舞蹈表演通常需要机器人具有较高的灵活性和动作幅度,因此在材料选择和制作工艺上需要考虑如何减轻机器人的自重,增加关节的灵活度,并保证机器人的结构稳定性和耐用性。
二、实现方法针对小型舞蹈双足机器人的设计思路,下面将介绍其实现方法。
1. 外形和结构设计:需要进行机器人的外形设计和结构设计,确定机器人的整体比例和外观设计,然后进行机器人的CAD建模和结构分析,确定机器人的结构设计方案和材料选择。
2. 动力系统设计:机器人的动力系统主要包括驱动器和电源系统。
需要选择合适的电机和减速器作为机器人的驱动器,以及合适的电池作为机器人的电源,确保机器人能够稳定地进行舞蹈动作。
3. 传感系统设计:机器人的传感系统主要包括姿态传感器、力/力矩传感器、视觉传感器等。
需要选择合适的传感器,并进行传感器的布置和数据采集和处理,确保机器人能够准确地感知和控制自身的姿态和运动状态。
小型舞蹈双足机器人的设计及实现

小型舞蹈双足机器人的设计及实现
舞蹈双足机器人是一种能够模仿人类舞蹈动作的机器人。
设计和实现小型舞蹈双足机器人需要考虑以下几个方面:
1. 结构设计:舞蹈双足机器人需要具备两只类似于人类脚的结构,包括足弓、足底以及趾部。
机器人的腿部需要具备关节,以便实现各种舞蹈动作。
机器人的身体结构也需要设计合理,以保持稳定性和平衡性。
2. 动力系统:舞蹈双足机器人需要具备足够的动力来支撑各种舞蹈动作。
可以采用电动机驱动或者液压系统驱动。
机器人的电池或者液压泵等供能部分也需要设计合理,以保证机器人能够持续运动。
3. 传感器:舞蹈双足机器人需要具备传感器来感知周围环境。
传感器可以用于测量机器人的姿势、力量、速度等参数,以便对机器人进行实时控制和调整。
常用的传感器包括加速度传感器、陀螺仪、力传感器等。
4. 控制系统:舞蹈双足机器人的控制系统是实现各种舞蹈动作的关键。
控制系统一般包括硬件和软件两部分。
硬件方面可以采用主板、驱动器、传感器等组成,而软件方面需要编写相应的控制算法和动作规划算法。
5. 编程和模拟:在实现舞蹈双足机器人之前,可以使用相关的仿真软件进行模拟和调试。
通过模拟可以验证设计的合理性和稳定性,并进行舞蹈动作的优化。
在实现舞蹈双足机器人时,可以采用模块化的设计思路,将不同的功能模块进行独立设计和开发,然后将各个模块进行集成测试和调试。
设计和实现小型舞蹈双足机器人需要综合考虑结构设计、动力系统、传感器、控制系统以及编程和模拟等多个方面,才能够实现良好的舞蹈效果和稳定性。
小型舞蹈双足机器人的设计及实现

小型舞蹈双足机器人的设计及实现舞蹈双足机器人是一种能够模仿人类舞蹈动作的机器人。
设计和实现小型舞蹈双足机器人需要考虑以下几个方面:1. 机械结构设计:双足机器人的机械结构应该能够模仿人类双足的动作,因此需要设计具有足跟、足弓和脚趾的机械结构。
机器人的骨架应该具有足够的坚固性和灵活性,以便于执行各种舞蹈动作。
2. 动力系统设计:舞蹈双足机器人需要具有足够的动力来支撑机器人的运动。
可以采用电机和液压系统等方式为机器人提供动力。
电机可以用于驱动机器人的关节,而液压系统可以用于提供机器人的强力动作。
3. 传感器系统设计:双足机器人需要具有感知自身和周围环境的能力。
可以采用惯性测量单元(IMU)、压力传感器和视觉传感器等技术来感知机器人的姿态、脚底接触力和周围物体的位置等信息。
4. 控制系统设计:舞蹈双足机器人的控制系统需要能够精确地控制机器人的动作。
可以采用PID控制器或其他控制算法来实现对机器人的控制。
还可以采用运动捕捉技术来实时获取人类舞者的动作数据,并将其应用于机器人的动作控制。
在实现舞蹈双足机器人的过程中,可以采用以下几个步骤:1. 设计机器人的机械结构,包括双足和躯干的形状和比例等。
2. 选择适合机器人动作的驱动系统,如电机或液压系统,并安装在机器人的关节处。
3. 设计和制作机器人的传感器系统,以便于机器人感知自身和周围环境的信息。
4. 开发机器人的控制系统,包括动作规划和轨迹控制等功能,以便于实现机器人的舞蹈动作。
5. 进行实验和测试,调整机器人的参数和控制算法,直至达到满意的舞蹈效果。
设计和实现小型舞蹈双足机器人是一个复杂的任务,需要涉及机械设计、动力系统、传感器系统和控制系统等多个方面的知识。
通过合理的设计和实现,可以使机器人模仿人类舞蹈动作,具备一定的舞蹈表演能力。
小型舞蹈双足机器人的设计及实现

小型舞蹈双足机器人的设计及实现随着科技的不断发展,机器人已经逐渐成为了人们生活中不可或缺的一部分。
双足机器人更是备受关注,因为它能够模仿人类的步态和行走方式,具有很高的研究和实用价值。
本文将着重介绍小型舞蹈双足机器人的设计和实现过程。
一、设计方案1.1 结构设计小型舞蹈双足机器人的结构设计需要考虑到机器人的稳定性和灵活性。
一般来说,双足机器人的结构包括两条腿、躯干和头部。
由于设计的是小型舞蹈机器人,所以结构设计的关键是要保证其舞蹈动作的流畅性和美观性。
1.2 控制系统设计小型舞蹈双足机器人的控制系统设计是整个机器人设计中最为关键的一部分。
控制系统需要保证机器人可以按照预设的舞蹈动作进行运动,并能够对外界环境的变化做出及时的反应。
控制系统通常采用的是传感器和执行器相结合的方式。
传感器可以用来感知机器人身体的姿态和环境的变化,执行器则用来控制机器人的运动。
在小型舞蹈双足机器人的设计中,通常会采用陀螺仪、加速度计和位置传感器等来感知机器人身体的姿态,然后通过舵机等执行器来控制机器人的运动。
1.3 电源供应与动力系统设计小型舞蹈双足机器人通常会采用锂电池或者镍氢电池作为电源供应,这样可以保证机器人的动力足够,同时又能够保持机器人的轻巧性。
动力系统通常会采用电机和舵机相结合的方式,电机用来提供机器人的移动动力,舵机用来控制机器人的身体姿态。
二、实现过程2.1 结构制作与装配在实现小型舞蹈双足机器人的过程中,首先需要进行结构制作与装配工作。
根据设计方案,制作机器人的腿部、躯干和头部,并进行装配。
在装配过程中需要保证机器人的结构稳定,同时要保证机器人的外形美观。
在结构制作与装配完成之后,就需要进行控制系统的调试工作。
首先需要编写控制程序,然后进行传感器和执行器的调试,保证机器人可以按照预设的舞蹈动作进行运动。
在调试过程中需要考虑到机器人的稳定性和姿态控制的准确性。
最后需要进行电源供应与动力系统的调试工作。
将电池与动力系统连接起来,然后进行动力系统的调试,保证机器人的动力足够,并且能够保持机器人的轻巧性。
基于CAN总线的仿人机器人传感器系统的设计与实现
控 一
一
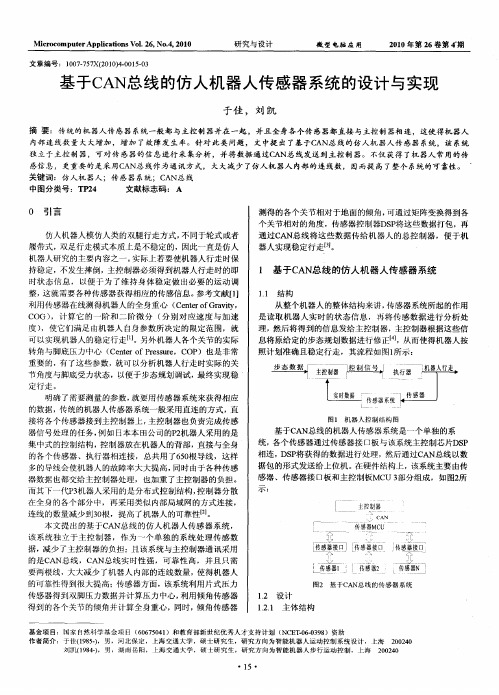
的数据 , 传统的机器人传感器系统一般采用直连的方式 , 直 接将各个传感器接到主控制器上 , 主控 制器 也负 责完成传感 器信号处理的任务 , 例如 日本本 田公司的P 机器人采用的是 2 集 中式的控 制结构 , 制器放在机器人 的背部 , 控 直接与全身 的各个传感器、执行器相连接 ,总共用 了6 0 5 根导线 ,这样
C G) 计 算 它 的 一 阶 和 二 阶 微 分 ( 别 对 应 速 度 与 加 速 O , 分
1 基于C N总 线 的仿人 机器 人传感 器 系统 A
11 结 构 . 从整个机器人 的整体结构来讲 , 传感器系统所起的作用
是读取机器 人实时 的状态 信息 ,再 将传感数据进行 分析处 理,然后将得 到的信 息发给主控制器 , 主控制器根据这些信 息将 原给 定的步态规划数据进行修 实, 器 一 从而使得机器人按 照计划准确且稳定行走 ,其流程如图1 所示 :
Mi oo ue A pia os o.6 N . 21 c cmp t p l t n 12 , o , 00 r r ci V 4
文 章 编 号 : 10 .5 X(0 040 1—3 0 77 7 2 1).o 50
研 究 与设计
微 型 电脑 应 用
21 00年第 2 卷 第 4 6 - 期
度) ,使它们满足 由机器人 自身参 数所 决定 的限定范 围,就 可 以实现机器人的稳 定行走…。另外机器人各个关节 的实际
转 角 与 脚 底 压 力 中心 ( etr f rs r ,C P C ne es e O )也 是非 常 oP u
小型舞蹈双足机器人的设计及实现

小型舞蹈双足机器人的设计及实现引言随着科技的不断发展,机器人技术在各个领域得到了广泛的应用,其中机器人舞蹈已经成为了一种时尚和艺术表现。
在这个背景下,设计并制作一款小型舞蹈双足机器人成为了一个新的挑战和机遇。
本文将从设计的角度,详细介绍小型舞蹈双足机器人的设计及实现过程。
一、需求分析在设计小型舞蹈双足机器人之前,我们首先需要明确这款机器人的应用场景以及功能需求。
具体来说,小型舞蹈双足机器人需要具备以下功能和特点:1.双足行走:机器人需要能够通过双足行走的方式在平地上进行移动。
2.舞蹈表演:机器人需要能够执行各种舞蹈动作,包括转身、跳跃、摆臂等。
3.稳定性:机器人在进行舞蹈表演时需要保持稳定,不易倒地或者失去平衡。
4.远程控制:机器人需要能够通过无线遥控器或者APP进行远程控制。
5.动作自由度:机器人需要具备足够的关节自由度,以便实现各种复杂的舞蹈动作。
二、机械结构设计基于以上的功能需求,我们进行了小型舞蹈双足机器人的机械结构设计。
机械结构设计主要包括机器人的身体结构、关节设计以及驱动设计。
1.身体结构:为了保证机器人具备足够的稳定性,我们采用了双足设计,并在双足之间设置了一个重心平衡器。
重心平衡器可以根据机器人的姿态动态调整,以保持机器人的稳定性。
2.关节设计:机器人的关节设计是机械结构设计中的关键部分。
我们采用了多自由度的关节设计,包括膝关节、髋关节、踝关节等。
这些关节可以使机器人具备足够的灵活性,可以执行各种舞蹈动作。
3.驱动设计:为了保证机器人的动作自由度,我们采用了多电机驱动设计。
每个关节都配备了独立的电机,可以实现各种舞蹈动作的执行。
三、控制系统设计控制系统设计是小型舞蹈双足机器人设计中的另一个关键部分。
控制系统设计包括姿态控制、运动规划以及远程控制等。
1.姿态控制:为了保证机器人在舞蹈表演过程中保持稳定,我们采用了倒立摆控制算法。
通过倒立摆控制算法,可以实时调整机器人的姿态,保持其平衡。
机器人足底力传感器的设计与研发
机器人足底力传感器的设计与研发近年来,机器人技术得到了快速的发展和应用。
在机器人移动和运动控制中,足底力传感器是一个非常重要的技术研究方向。
足底力传感器可以有效地获取机器人之间的地面静态和动态力信息,从而改进机器人移动姿态、提高其稳定性和控制能力。
因此,机器人足底力传感器的设计和研发是一种热门的研究领域,具有很高的实用价值和研究价值。
一、机器人足底力传感器的作用和特点机器人足底力传感器是一种测量机器人在地面上受到力的设备,能够测量机器人足部所受到的负载和重量。
足底力传感器的主要作用是帮助机器人了解自身的位置和运动状态,并通过反馈控制实现更有效的运动控制。
足底力传感器还可以实现机器人的路径规划和避障,并提高机器人在复杂环境下的灵活性和适应性。
足底力传感器的特点主要体现在以下几个方面:1.高精度:足底力传感器需要精确和稳定地测量机器人所受的力,并传递到机器人的运动控制系统中,控制机器人移动。
因此,足底力传感器需要保证高精度的力测量能力,并具有良好的稳定性和重复性。
2.多功能性:在实际应用中,机器人需要应对各种复杂的地形和环境,在不同场合下需要不同的足底力传感器。
因此,足底力传感器需要具有多功能性,可以适应不同的环境和任务需求。
3.轻量化:机器人本身需要具有良好的移动性和机动性,因此其装备的传感器也需要轻量化,以便提高机器人的运动效率。
二、机器人足底力传感器的设计方法和实现思路机器人足底力传感器的设计和实现方法有多种,主要包括接触式和非接触式两种方法。
接触式传感器通过机器人足部与地面接触的方式来感知地面力,常见的接触式传感器有压力电阻式、应变计式、金属薄膜式等。
非接触式传感器通过测量地面力产生的电磁场或压力波等方式来实现非接触式力测量,常见的非接触式传感器有电容式、电感式、激光测距式等。
在机器人足底力传感器的设计和实现中,需要综合考虑多种因素,如传感器的精度、稳定性、重量、价格等。
一般情况下,需要根据具体的场景和任务需求来选择合适的传感器类型和结构形式,同时需要借鉴先进的研究成果和前沿的科技进展,不断提高足底力传感器的设计和实现技术。
机器人足部仿生设计及控制

机器人足部仿生设计及控制如今机器人已经成为了现代化的产物,而机器人的出现也非常的普遍。
在工业制造、电子、机械等领域都可以看到机器人的身影。
而机器人的仿生设计也成为了一个新的方向。
在这其中最受关注的是机器人足部仿生设计及控制。
本篇文章将介绍机器人足部仿生设计及控制的相关知识。
一、机器人足部仿生设计的发展历程机器人足部仿生设计是在仿生学的基础上发展而来的。
而仿生学是指从生物体中获取设计的灵感和思路,将其运用到机械设计和工程制造中去,这也就是仿生设计。
机器人足部仿生设计可以追溯到上世纪60年代。
当时人们设计出了一种由多个支撑点组成的机械脚,这也是足部仿生的第一步。
而在80年代和90年代中期,足部仿生的技术进一步发展,同时也涌现出了许多机器人足部的设计。
如今已经有许多厂商在跨足足部仿生设计和制造方面。
二、机器人足部仿生设计及控制的原理机器人足部仿生设计是基于人体足部结构的特点来设计的。
人体足部的结构是非常复杂的,包括脚底、脚跟、足弓、跖骨、踝骨等一系列的骨骼和肌肉。
机器人足部仿生设计也是以类似的原理来设计的,主要包括了弹簧结构、摆臂、两轴结构、滑块等。
这些结构经过复杂的组合,再加上控制系统的精心设计,便可以实现机器人足部的行走、跳跃、攀爬等多种复杂动作。
三、机器人足部仿生设计及控制的应用场景机器人足部仿生设计及控制有着广泛的应用场景。
在军事领域,机器人足部可以用于机器人解决森林、崎岖山地、高原、沙漠等复杂地形障碍问题,而这是现有的轮式和履带式机器人很难解决的问题。
在工业领域,机器人足部可以应用于管道、轮廓较为复杂的部件的检测和维护。
在矿山、海洋勘探等自动化领域也都有极其广泛的应用。
四、机器人足部仿生设计及控制的未来发展目前机器人足部仿生设计及控制的发展还处于起步阶段,随着科技的不断进步,机器人足部仿生技术有望实现更加精简和高效率的设计。
有一些正在开展的研究,也将足部仿生技术应用于人机合作领域,在医疗、保健、家庭服务等领域都有非常广泛的应用。
机器人足底感知技术研究

机器人足底感知技术研究近年来,随着机器人技术的不断发展,机器人的应用场景也越来越广泛。
机器人在生产制造、医疗护理、教育培训等领域得到了广泛应用。
然而,在机器人的应用过程中,如何让机器人具备更好的足底感知能力,成为了科技界亟待解决的问题。
从人体学角度来看,人类的足底是整个身体中最复杂的结构之一,具有丰富的感知能力,可以感知地面的摩擦力、垂直压力等信息,为人类的行动提供了重要支撑。
与之类似,如果机器人也具有优秀的足底感知技术,将会提高机器人的运动稳定性和定位精度,进而拓展机器人的应用领域。
在机器人足底感知技术的研究中,主要有以下几个方向:一、足底力感知技术足底力感知技术是指通过机器人底部的传感器获取地面的压力分布信息,从而实现机器人的动态稳定性控制。
该技术可以通过接触式、非接触式和混合式三种方式来实现。
接触式足底力感知技术需要机器人与地面接触,通过机器人底部的压力传感器感知地面的力分布。
这种技术精度较高,但需要与地面直接接触,易受地面变化和空气影响。
非接触式足底力感知技术采用无线传感器,通过感知地面的距离来推算地面的力分布情况,避免了与地面直接接触,但精度有所下降。
混合式足底力感知技术则是将接触式和非接触式技术结合,以取得两者的优点。
例如,可以使用多传感器对机器人进行力感知,并通过算法进行融合,获取更准确的地面力分布信息。
二、足底摩擦力感知技术足底摩擦力感知技术是指通过机器人底部的传感器或者对机器人的电机进行控制,来感知机器人在地面摩擦力的大小和变化趋势,并对机器人的运动进行动态调控。
该技术可以在机器人行走时提高其运动的平稳性和准确性,同时也有助于机器人在复杂地形下的行动。
三、双足运动感知技术双足运动感知技术主要是指通过在机器人脚部位置安装传感器,感知机器人的步态信息、速度和方向等运动状态,从而实现机器人在复杂环境下的自主行动和定位。
这种技术可以通过使用IMU(惯性测量单元)、陀螺仪、加速度计和磁力计等传感器来实现。
四足仿生机器人足部六维力传感器设计 (1)

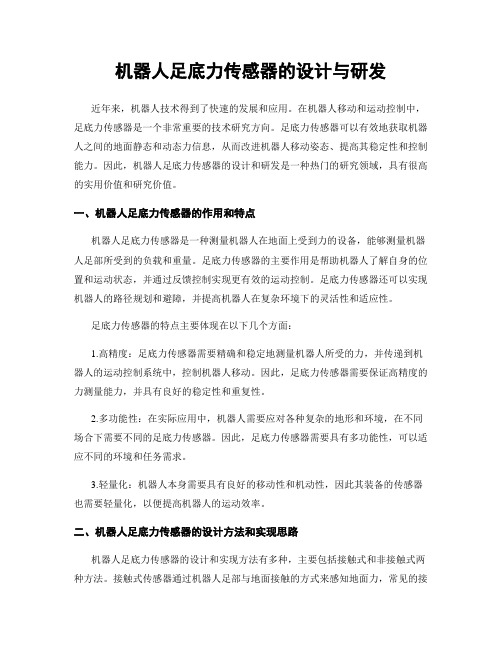
图 2 传感器及弹性体结构简图
弹性体滑轴与基座轴孔配合构成圆柱副 , 具有轴 向移动和绕轴转动 2 个自由度 , 传感器测力时 , 以 Fx 为例 ,弹性体的相应测力弹性梁发生弹性弯曲变形 , 非 测力弹性梁只发生轴向滑移 , 滑移摩擦力所产生的拉 压应力远远小于测力弹性梁的弯曲应力 , 弹性铰链使 这种对比效果更明显 。弹性铰链具有更多带阻尼的自
( 4)作用于弹性体中心台 ,绕 Y轴方向通过坐标原 点的力矩 M y = - 75Nm, M x与之相似 。
213 静态分析
( 1)变形分析 图 4为弹性体在 4种典型工况下的受力变形情况 , 在图 4a中 , Fz作用下 4根弹性梁都发生向下的弯曲变 形 ,测量 4根弹性梁的变形量可以得到 Fz;在图 4b中 , Fx作用下 X 向弹性梁发生 X 向滑移 , Y向弹性梁发生弯 曲变形 ,测量 Yz轴弹性梁的变形可以得到 Fx; 在图 4c 中 , M z作用下 4根弹性梁都发生绕 Z 轴的弯曲变形 , M z 可通过测量 4根弹性梁的变形量而得 ;在图 4d中 , M y作 用下 X 向弹性梁发生上下弯曲变形 , Y向弹性梁由于 X 向弹性梁得变形而发生绕 Y轴的转动 ,自身没有发生扭 转变形 ,测量 X 向弹性梁的变形量可得 M y。 ( 2)应变分析 图 5为弹性体在四种典型工况作用下的应变云图 。 弹性梁发生弯曲变形时 ,被拉伸面上的单元受到拉应力 而表现为正应变 , 如图中红色区域; 被压缩面上的单元 因受压应力而表现为负应变 , 如图中蓝色区域 , 颜色越
收稿日期 : 2009 - 08 - 10 3 基金项目 :国防基础科研资助项目
作者简介 :高军 (1978—) ,男 ,陕西白水人 ,西北工业大学硕士研究生 ,工程师 ,研究方向为机器人控制技术 ,力传感器技术 , ( E - mail) gau_mail@ 163. com。
机器人足底传感器的设计与实现
机器人足底传感器的设计与实现随着科技的进步,机器人越来越多地与人类互动,被广泛应用于工业自动化、医疗、服务、教育等领域。
机器人在与人类互动的过程中,扮演着越来越重要的角色。
然而,机器人的脚部位置控制和运动控制仍然存在一些挑战,而足底传感器便是解决这些挑战的重要工具之一。
机器人足底传感器是用于测量机器人脚部位置和动态运动的装置。
传感器可使用机器视觉技术、力传感器或压力传感器来探测脚底部位和行进轨迹。
本文旨在介绍机器人足底传感器的设计和实现过程。
1. 机器人足底传感器的设计机器人足底传感器的设计包括传感器类型选择、传感器安装位置和传感器接口设计三个部分。
1.1 传感器类型选择机器人足底传感器的类型有很多,例如机电式传感器、光电传感器、压电传感器、微机电系统(MEMS)传感器等。
传感器的选择需要考虑机器人脚底的载荷、环境因素等。
比如,在爬行式机器人中使用压电传感器来探测触地情况,可以确保机器人在爬行时的稳定性。
1.2 传感器安装位置传感器的位置应根据机器人的运动规律,选取最为合适的位置。
例如,在人形机器人中,传感器应安装在足弓区域,以便更精准地探测脚底位置和行进轨迹。
而在工业机器人中,传感器要安装在自身的底座上,以测量机器人运动的载荷和速度。
1.3 传感器接口设计机器人足底传感器需要与机器人的控制系统进行交互,因此传感器接口设计非常重要。
传感器的接口应与机器人的控制系统兼容,并要提供清晰的数据。
2. 机器人足底传感器的实现机器人足底传感器的实现包括传感器采集数据的过程和传感数据的处理过程两部分。
2.1 传感器数据采集机器人足底传感器的数据采集需要精确、快速,因此传感器本身的采样率和精度非常重要。
传感器采集的数据需要转换为数字信号,然后传输到机器人控制系统进行处理。
在传输的过程中,要根据传感器的类型和采样率等因素,选择合适数字通信接口。
2.2 传感器数据处理机器人足底传感器采集的数据需要进行处理。
数据处理的方式有很多,例如主成分分析法、小波分析法等。
小型舞蹈双足机器人的设计及实现

小型舞蹈双足机器人的设计及实现一、机器人设计1. 功能需求分析舞蹈双足机器人主要用于模仿人类的舞蹈动作,因此它需要具备以下功能:- 平衡控制:机器人需要能够自主保持平衡,避免摔倒。
- 动作控制:机器人需要能够根据预定的舞蹈动作进行灵活的运动。
- 敏感度:机器人需要能够感知周围环境,以便根据环境变化做出相应的动作调整。
- 电能供应:机器人需要长时间运行,因此需要有稳定的电源供应系统。
2. 机械结构设计机器人的机械结构设计是实现各种功能的基础。
一种常见的设计方案是将机器人分为上下两部分,上半部分为机械臂,下半部分为双足。
机械臂用于控制机器人的舞蹈手臂动作,而双足用于实现舞蹈步伐。
机器人的骨架采用轻质的合金材料,以保证机器人的灵活性和稳定性。
3. 传感器选择为了保证机器人的平衡和灵活性,需要配备各种传感器来感知机器人的姿态和环境变化。
常见的传感器包括加速度计、陀螺仪、力传感器等。
加速度计可以用来测量机器人的加速度和姿态,以判断机器人的倾斜程度;陀螺仪可以用来感知机器人的旋转角度和转动速率;力传感器可以用来检测机器人双足与地面的接触力,以确保机器人的稳定性。
二、机器人实现1. 运动控制算法机器人的运动控制算法是舞蹈双足机器人实现舞蹈动作的关键。
一种常用的控制算法是基于动力学模型的反馈控制算法。
该算法通过对机器人系统的建模,并结合传感器数据对系统进行反馈控制,实现机器人的平衡控制和舞蹈动作控制。
2. 软件系统设计为了实现对机器人的控制和指令发送,需要设计机器人的软件系统。
该系统包括机器人控制程序和用户界面。
机器人控制程序负责接收外部指令,实现运动控制算法,并控制机器人的运动。
用户界面用于用户与机器人进行交互,包括指令输入和运动状态显示。
3. 电源供应系统机器人需要长时间运行,因此需要设计稳定的电源供应系统。
一种常见的解决方案是使用锂电池作为机器人的电源。
该电池具有较高的能量密度和长 cycle 寿命,适合用于机器人的供电。
仿人机器人脚部部件的设计与仿真研究.pptx
仿人机器人的结构仿照人类设计,相比轮式机器人,在复杂地形 和恶劣的环境中拥有更强的适应能力。但目前仿人机器人的脚 部结构仍比较简单,多种功能比较缺乏,导致未能发挥仿人机器 人在非结构化环境下运动能力高、适应性强等特点。
本文在分析总结国内外仿人机器人脚部结构的研究现状的基础 上,针对以上问题,对仿人机器人新型的脚部结构进行设计优化 与仿真研究。首先,通过分析人体脚部的构成,确定了仿人机器 人脚部结构中各个部件的尺寸与功能划分,建立了脚部结构简化 模型。
在结构件的设计上运用了拓扑优化设计,保证结构件的强度并减 轻其重量。同时,比较了不同柔顺方式的优缺点,根据前后脚掌 不同的应用情况设计了不同的主被动柔顺机构。
后掌的被动柔顺结构在脚部受到冲击力时能够提供缓冲作用,前 掌的主动柔顺结构能够使机器人脚部适应不同的地形环境。根 据ZMP稳定判据为机器人脚部设计了合适的传感器网络布局。
运用倒立摆模型对简化模型进行了研究,确定了各个部件的作用 阶段与运动参数。同时分析了脚部关键部件在行走中的应力,为 后面的结构设计提供数据支撑。
然后,总结了目前主要的串联弹性驱动器结构,为仿人机器人脚 部设计了二自由度柔性踝关节机构。机构为机器人脚部加入了 额外的运动自由度与弹性元件,包括高集成度的并联液压驱动模 块、专用的串联弹性驱动器与类跟腱的变刚度结构,提高了仿人 机器人的运动能力与抗冲击能力。
接着,搭建了仿人机器人脚部结构的虚拟样机,对脚部结构进行 了运动仿真与关键机构的性能分析。运动仿真中得到了脚部样 机各个关节在行走过程中的运动参数,并根据前后掌应力曲线研 究了机器人脚部样机的步行阶段划分。
性能分析中对后掌缓冲机构、前掌变阻抗机构与类跟腱储能机 构进行了分析,分析了各个机构的性能。最后,对全文进行了总 结,并对未来研究方Байду номын сангаас做了展望。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第5卷 第1期 2010 年 1 月
小型仿人机器人脚底传感系统的设计与实现
53
们研制的两足步行机器人 WL-12RIII 中应用了六维力/ 力矩传感器,力/力矩传感器安装在小腿上[1]。日本本田 (HONDA)公司的仿人机器人 P2、P3 及 ASIMO 均应用 了集成六维力/力矩传感器,以此获得地面反力信息并 构成姿态控制系统, 在适应不平整地面和增强动态步行 稳定性的实验中获得成功。日本横滨(YOKOHAMA)国 立大学的 Yasutaka Fujimoto 等在其研制的两足步行机器 人中,应用六自由度力/力矩传感器对机器人进行姿态 控制, 实现了存在干扰情况下的稳定行走[1-4]。 清华大学 研制的仿人机器人采用以六维力/力矩传感器信息为主 建立姿态控制系统的方案,已取得一定的理论研究成 果。国防科技大学在 2003 年研制的仿人机器人同样采 用集成力/力矩传感器测量地面反力信息,并据此进行 了步态轨迹规划和在线轨迹调整方法研究[1]。然而集成 六维力传感器安装在脚踝位置, 分析地面反力时都是通 过等效计算到某个点上, 无法得到脚底不同部位上所受 的力,而且尺寸、重量比较大,价格昂贵,目前只有少 数大型智能机器人采用这种传感器。 在机器人脚底安装 4 个力传感器来计算 ZMP 点的值[4], 这种方法被应用于 很多小型仿人机器人, 然而这种方法没有将安装在脚底 的力传感器组成脚底传感阵列, 不能进一步利用脚底不 同部位受地面反力的信息。 针对现有仿人机器人脚底传感系统的缺陷, 本文通 过对小型仿人机器人机械机构、 运动控制系统结构和传 感器电路结构的分析, 提出并设计了一种适用于小型仿 人机器人的脚底传感系统。实验结果证明,该传感系统 能有效完成力信息的实时采集、计算与通讯,并为其他 外部环境信息的采集建立一定基础。
图 3、图 4 中:1 为上层板(top plate);2 为下层 板(lower panels);3、4 为调整孔(adjust hole);5 为力 /力矩传感器(force/torque sensor);6 为矩形橡胶垫 (rectangular rubber mat);7 为电路板(boards);8 为橡 胶引导块(rubber boot block)。 上层板为两端带侧板的矩形板, 其材料为轻质的铝 合金,两端侧板上分别设有调整脚板高度的调整孔,上 层板通过调整孔和螺钉与下层板固定连接, 在上层板的 板面上设有螺孔, 通过螺孔和螺钉分别与上层板下面的 电路板及上层板上面的脚踝固定连接。 下层板为两端带侧板的矩形板, 其材料为轻质的铝 合金,两端侧板扣在上层板的两侧板内,分别在对应于 上层板侧板的调整孔处设置了调整孔,以调节上、下层 板之间的空间距离及脚板高度。 在下层板的板面上均匀 设置了 3 排且每排均匀设置 3 个圆槽, 以便装设 9 个力 /力矩传感器。在下层板的下面用胶粘剂固接矩形橡胶 垫,矩形橡胶垫与地面为面接触,可防滑,使机器人稳 定行走,并减小地面反力带来的危害。 力/力矩传感器为 9 个普通的市购力/力矩传感器, 用于测量脚底板各部位所受地面反力的大小,价格低 廉,能降低机器人的成本。橡胶引导块为圆形橡胶块, 9 个力/力矩传感器分别通过橡胶引导块固接在下层板 板面的 9 个圆槽内,9 个橡胶引导块分别通过橡胶粘结 剂与矩形橡胶垫的上面固接。当地面反力达到力/力矩 传感器的量程最大值时,橡胶引导块与地面保持平行, 不会承受更大的力,起到了保护力/力矩传感器的作用。 2.2 硬件设计 硬件电路板由小信号放大滤波电路、控制器、局域 控制网(CAN)总线接口、RS232 串口总线构成。小信号 放大滤波电路由五级放大滤波电路构成,对力/力矩传 感器感知到的小信号起放大、滤波和抗干扰作用,把力
第5卷 第1期 2010 年 1 月
/力矩传感器采集的力/力矩小信号放大为实际应用的模 拟信号。小信号放大滤波电路的输出端与控制器连接, 控制器将模拟信号转换为数字信号, 通过数据处理模块 对数字信号进行处理,并计算零力矩点(ZMP),通过局 域控制网(CAN)总线接口与上层控制器通讯形成 ZMP 的闭环, 使上层控制器通过控制机器人的脚来适应地面 环境, 通过 RS232 总线与计算机连接, 实时地观测数据 采集的情况。CAN 总线结构具有较强的易扩展性和较 高容错性能。每个外部信息传感器都可以独立设计;在 信息采集结构中,每个模块都是对等的,其间可以点对
发展趋势。 稳定性检测主要是通过对机器人实际稳定点 的检测来判断机器人的稳定性,主要是利用力/力矩传 感器对地面反力的检测,是安装力传感器的主要目的。 在线获取 ZMP 点的位置,并以此作为仿人机器人步态 行走的稳定性判据,通过力传感器在线获取 ZMP 点可 以对机器人进行实时步态规划与控制, 从而实现机器人 的稳定行走。 早在 1989 年, 日本早稻田(WASETA)大学首先在他
1 小型仿人机器人脚底传感系统
将仿人机器人控制系统的大开环变为大闭环以增 加外部信息传感器是改进控制结构的最基本条件。 脚底 力传感系统位于控制系统的底层, 用于检测地面的反力 信息并将其传给上层控制器, 使控制系统从大开环变为 大闭环。 增加外部信息传感器要在不改变现有控制系统 硬件结构的基础上,扩展外部信息采集和处理模块,形 成开放的分层信息采集与处理结构, 结构的底层节点由 多个传感器信息采集和预处理模块(包括放大、滤波和 计算等)构成,得到的处理信息通过接口实时地传送到 上层控制器, 形成一个从外部信息到产生机器人动作序 列的过程。
图 2 仿人机器人脚底传感系统构成图 Fig. 2 Diagram of humanoid robot foot sensor system 图 1 仿人机器人控制系统结构图 Fig. 1 Diagram of humanoid robot control system
2 小型仿人机器人脚底传感系统设计
52
中国科技论文在线
Sciencepaper Online
第5卷 第1期 2010 年 1 月
小型仿人机器人脚底传感系统的设计与实现
王晓龙,李祖枢,薛方正
(重庆大学智能自动化研究所,重庆 400044)
摘 要:针对小型仿人机器人的零力矩点(ZMP)轨迹在线确定问题, 设计了一种基于多个简单一维力/力矩传感器的脚 底传感阵列系统以及一种距离可调的多孔、双夹板机构,用以安装力/力矩传感器,并实现了脚底传感器信号多级放大 及采集软硬件系统。 应用CAN总线接口实现了与外部上层控制器的通信。 实现了小型仿人机器人行走过程中实际ZMP 轨迹的在线计算和实时传递。实验结果证明,该传感系统能够有效地完成脚底力信息的实时采集、计算与通讯。 关键词:小型仿人机器人;零力矩点;力/力矩传感器 中图分类号:TP242.6 文献标志码:A 文章编号:1673-7180(2010)01-0052-6
图5
小信号放大滤波电路原理图
Design and implementation on foot sensor system of small humanoid robot
Wang Xiaolong,Li Zushu,Xue Fangzheng (Institute of Intelligent Automation, Chongqing University, Chongqing 400044, China) Abstract: In order to on-line identify a small humanoid robot zero moment point (ZMP) trajectory, A kind of foot sensor array system based on a number of simple one-axis force / torque sensors, and an adjustable distance porous, double-plywood framework to install the force/torque sensor was designed. And we achieved multi-stage amplification of the foot sensor signals and the hardware and software system for collect information. We also realized communication with external micro control unit (MCU) by using controller area network (CAN) bus, as well as on-line calculation and real-time delivery of the actual ZMP trajectory throughout the whole walking phase. The actual experiments demonstrated that this sensor system can effectively complete the real-time collection, computing and communication of the feet force information. Key words: small humanoid robot;zero moment point (ZMP);force/torque sensors
0 引 言
在仿人机器人运动控制方法研究中, 如何增强机器 人在未知环境下的适应能力一直是研究的重点之一。 仿 人机器人通过脚掌与地面接触, 最重要的信息是地面通 过脚掌对机器人所作用的力信息。因此,在机器人机构 上安装力传感器,以增强机器人对环境的适应能力,从 而实现稳定行走, 这是仿人机器人控制技术研究的一个
收稿日期:2009-10-21 基金项目:高等学校博士学科点专项科研基金(20070611018) 作者简介:王晓龙(1984- ),男,硕士研究生,主要研究方向:智能机器人 通信联系人:李祖枢(1945- ),男,教授,主要研究方向:仿人智能控制与智能机器人,zushuli@