第二学期第五讲机器人导论
《机器人导论》课程设计报告

《机器人导论》课程设计报告专业:物联网工程班级:18-1学号:180*******姓名:******指导老师:**********完成时间:2020年5 月31 日摘要农产品行业机械化,自动化一直是人们关注的焦点。
许多果农都希望有一种机器人的能替自己完成水果的采摘。
现阶段我国的绝大部分水果采摘都由人工实现,劳动强度大,且劳动工资较高。
水果不及时的采摘不仅会,错过水果最佳的上市时间难以抢占市场,还会导致水果损坏在果树上造成较大的经济损失。
特别是对于草莓行业的发展,草莓的采摘时间比较短,比较容易坏且人工采摘的效率比较低下。
接下来和大家讲一下草莓采摘机器人。
草莓采摘机器人的是一个集环境感知、行为控制、水果识别等功能于一体的总和系统。
水果采摘机器人的一个很关键的技术,就是机器识别,这关系到水过准确采摘而不损坏水果本身。
本文将以水果采摘机器人为研究对象,对水果采摘机器人进行分析、研究和设计,并着重分析机器视觉在草莓机器人中的运用。
关键词草莓采摘机器人机器视觉AbstractMechanization and automation of agricultural products industry have always been the focus of attention. Many fruit farmers hope to have a robot to pick fruit for themselves. At present, most fruit picking in our country is realized manually, with high labor intensity and high labor wage. It is not only difficult to seize the market if the fruit is not picked in time, but also cause the fruit damage and great economic loss. Especially for the development of strawberry industry, the picking time of strawberry is relatively short, it is easy to be damaged and the efficiency of manual picking is relatively low. Let's talk about the strawberry picking robot. Strawberry picking robot is a total system which integrates environmental perception, behavior control, fruit recognition and other functions. One of the key technologies of fruit picking robot is machine recognition, which is related to accurate picking without damaging the fruit itself. This paper will take fruit picking robot as the research object, analyze, research and design fruit picking robot, and focus on the application of machine vision in strawberry robotKeywords:Strawberry picking robot machine vision目录摘要 ............................................................................................................................. 错误!未定义书签。
机器人学导论第五章
ω
写出例5.3中的雅克比矩阵 由例5.3的结果 式(5-55)可写出坐标系{3} 的雅克比表达式
3
l1s2 J θ l1c2 l2
0 l2
(5-66)
式(5-57)可写出坐标系{0}的雅克比表达式
3
- l1s1 l2 s12 J θ l1c1 l2c12
雅克比矩阵的定义为
建立连杆坐标系,图5-11为施加在连杆i 上的静力和静力矩(重力除外)。将这 些力相加并令其和为0,有
图5-11单连杆的静力和静力矩的平衡关系
将绕坐标系{i}原点的力矩相加,有 如果我们从施加于手部的力和力矩的描述开始,从 末端连杆到基座进行计算就可以计算出作用于每一 个连杆上的力和力矩。将以上两式重新整理,以便 从高序号连杆向低序号连杆进行迭代求解。结果如 下
例5.3 图5-8所示是具有两个转动关节的操作 臂.计算出操作臂末端的速度,将它表达成操作 臂末端的函数。给出两种形式的解答,一种是 用坐标系{3}表示,一种是用坐标系{0}表示。
图5-8两连杆操作臂
图5-9两连杆操作臂的坐标系布局
首先将坐标系固连在连杆上,计算连杆变换如 下
c1 s 1 0 T 1 0 0 s1 0 0 c1 0 0 0 1 0 0 0 1
机器人学导论
第五章 静力和速度
——新疆大学机械工程学院
第五章 速度和静力
概述 在本章中,我们将机器人操作臂的讨论扩展到静 态位置问题以外。我们研究刚体线速度和角速 度的表示方法并且运用这些概念去分析操作臂 的运动。我们将讨论作用在刚体上的力,然后 应用这些概念去研究操作臂静力学应用的问题。 关于速度和静力的研究将得出一个称为操作臂雅 克比的实矩阵。
机器人学导论
机器人的动力学模型
牛顿-欧拉方程
拉格朗日方程
凯恩方法
雅可比矩阵
机器人的运动规划与控制
运动学:研究机器人末端执行器的位置和姿态信息 动力学:研究机器人末端执行器的力和力矩信息 运动规划:根据任务要求,规划机器人的运动轨迹 控制:通过控制器对机器人进行实时控制,实现运动规划
机器人的感知与感
05
知融合
01
添加章节标题
02
机器人学概述
机器人的定义与分类
机器人的定义: 机器人是一种能 够自动执行任务 的机器系统,具 有感知、决策、
执行等能力
机器人的分类: 根据应用领域、 结构形式、智能 化程度等不同, 机器人可分为多 种类型,如工业 机器人、服务机 器人、特种机器
人等
机器人学的研究领域
机器人设计:研究机器人的结构、 运动学和动力学
机器人的感知技术
添加项标题
视觉感知技术:通 过摄像头获取环境 信息,识别物体、 场景等,实现机器 人视觉导航、物体 识别等功能。
添加项标题
听觉感知技术:通 过麦克风获取声音 信息,识别语音、 音乐等,实现机器 人语音交互、音乐 识别等功能。
添加项标题
触觉感知技术:通过 触觉传感器获取接触 信息,识别物体的形 状、大小、硬度等, 实现机器人触觉导航、 物体抓取等功能。
执行器作用:根据控制信号执行相应的动作,如移动、转动等
机器人的感知系统
传感器类型:视觉、听觉、触觉等 传感器工作原理:图像处理、语音识别、触觉反馈等 传感器在机器人中的应用:导航、目标识别、物体抓取等 感知系统对机器人性能的影响:精度、稳定性、安全性等
机器人的运动学与
04
动力学
机器人的运动学方程
学年第二学期第五讲机器人导论
缺点
很多情形预先规划有效的轨迹有相当难度
涉及机器人速度和加速度的限制和约束
无法适应或更正环境动态变化产生
形成的轨迹通常不是光滑的
3.6.1
goal xI
运动控制之反馈控制
3.6.2
Feedback Control, Problem Statement
yR
v(t) xR
( t)
start
e
goal
考虑
yR
{ 1,2=/2, 1=0, 2= }
侧滑约束退化
工作空间由3D退化成为1D
{ y=0, =0 } 滚动约束
[ -sin(+) cos(+) lcos ]R()I’+r’=0 等价地可以表示成
=(x/r)+0
3.4.2 xR
3.4.3
路径 / 轨迹 : 全向驱动/Omnidirectional Drive
3.6.2
3.6.2
控制路径/Resulting Path
稳定性问题/Stability Issue
可以进一步证明,在下述条件下,闭环系统是局部指数稳定的
3.6.2
证明:
k 0;k 0;k k 0
对于接近于零的 x cosx = 1, sinx = x , 则有
矩阵 A 的特征多项式为 不难看出,其所有根均具有负实部。得证。
以描述成
I x cos
y
sin
0
0
10v
Dy
运动控制: 坐标变换/Coordinates Transformation
在惯性参考坐标系中进行及坐标变化:
= x2 y2
a tan 2( y, x)
y
机器人学导论第五章PPT学习教案
A
VQ
A
B VQ
ABA(Q5-11)
第8页/共42页
线速度和角速度同时存在的 情况
(5-13)
这是把原点的线速度加到式
(5-12)中,得到了从坐标系
{A}观测坐标系{B}的普遍公
式。
第9页/共42页
5.4 对角速度的进一步
前一节用几何方法研证究明了式(5-10)的有效性,
这里将引入数学方法
θ
0v
0
0
0
ω
(5-65)
第25页/共42页
写出例5.3中的雅克比矩阵
由例5.3的结果 式(5-55)可写出坐标系{3} 的雅克比表达式
3
J
θ
l1s2 l1c2
l2
0 l2
(5-66)
式(5-57)可写出坐标系{0}的雅克比表达式
3
J
θ
- l1s1 l2s12 l1c1 l2c12
l1c1θ1
l2c12
θ1
θ2
0
第22页/共42页
5.7 雅克比
雅克比矩阵是多元形式的导数。例如假设有6 个函数,每个函数有6个独立变量:
第23页/共42页
由多元函数求导法则得
在任一瞬时,x都有一个确定的 值,J( X)是一 个线性 变换。 在每个 新时刻 ,如果 X改变 ,线性 变换也 随之而 变。所 以雅克 比是时 变的线 性变换 。
的固运定动的B。Q 此,如时图我5们-3假所定示AB。R 这不里随已时经间认变为化坐。标则系Q{点A}是 相对于坐标系{A} 的运动是由于A PBORG 或BQ 随时间的变化 引起的。
第7页/共42页
角速度
我们讨论两坐标系的原点重合,相对线速度为0 的情况。
机器人导论绪论课件

02
机器人的发展历程与趋势
机器人的发展历程
起步期
01
机器人的概念起源于20世纪初,但当时的技术和理论基础都较
为薄弱,发展缓慢。
发展期
02
随着计算机技术、传感器技术和控制技术等的发展,机器人技
术得到了迅速发展,并逐渐应用于工业生产。
成熟期
03
机器人技术逐渐成熟,应用领域也不断扩大,包括医疗、军事、
强化学习
机器人通过与环境的交互,学习 如何在给定的任务中获得最大的 累积奖励。强化学习在机器人控 制、路径规划等任务中具有很大
的潜力。
总结
机器人的关键技术涵盖了感知、 控制和学习等多个方面。这些技 术的发展将推动机器人在更多领 域的应用,为人类生活带来更多
便利。
04
机器人的应用领域与挑战
机器人的能够独立完成更多任务,减少 对人类的依赖。
03
机器人的关键技术
机器人感知技 术
环境感知
机器人通过激光雷达、摄像头、超声波传感器等设备获取环境信息,实现环境 的感知和理解。这些感知数据可以用于构建地图、定位、避障等任务。
自身状态感知
机器人需要感知自身的状态,如位置、姿态、速度等,以实现精确的运动控制。 通常通过内部传感器,如加速度计、陀螺仪、编码器等实现。
02
机器人通常装备有各种先进的技 术,如人工智能、计算机视觉、 语音识别等,以实现更高级别的 自主性和智能化。
机器人的分 类
按照应用领域分类
包括工业机器人、服务机器人、医疗机器人、军事机器人等。工业机器人主要用于生产线 上的自动化生产,服务机器人则用于家庭、酒店等服务场所,医疗机器人可以协助医生进 行手术等操作,军事机器人可用于侦察、作战等任务。
机器人学_第五讲 微分运动和速度
• 微分变换 -一组平移和旋转共同组成。
4
第五讲 2 坐标系的微分运动
• 微分旋转
定义:绕x,y,z轴的微分转动分别为δx, δy, δz。
由于旋转量很小,近似等式有:
sinx x
弧度
cosx 1
1
Rot(x,x) 0
0 0
0 1
x
0
0
x
1 0
0 0
Rot( y,y)
1 0
0 1
y
0
0 1 0 0
y
0 1 0
0
1
0 Rot(z,z) z
0
0
1
0
z
1 0 0
0 0 1 0
0 0 0 1
注意:这里 1 (x)2 1 违反了单位方向向量的要求,但是,高阶微分项 ( x)2可以看做忽略不计,所以依旧可以认为是满足的。
T
Tz
Ty
0
Tx
Tx T dy
0 T dz
0 0 0 0
其中:
Tx n
Ty o
Tz a
Tdx n p d Tdy o p d Tdz a p d
14
第五讲 3 雅克比矩阵定义
雅克比(Jacobian)矩阵:表示机械臂末端速度和各 个关节速度之间的关系。 对于在三维空间中运行的具有6个关节的机器人有:
dT代表什么?
还记得不?
dT T T T
注意:下面的左右乘的区别,依旧是绝对左乘,相对右乘
13
第五讲 2 坐标系的微分运动
• 坐标系之间的微分变换
由于两者都是描述坐标系在固定参考坐标系中的相同变化,
机器人导论课程设计
机器人导论课程设计一、课程目标知识目标:1. 学生能理解机器人的基本概念,掌握其分类、应用领域和发展历程。
2. 学生能了解机器人编程的基本原理,掌握简单的编程指令和逻辑思维。
3. 学生能了解机器人传感器的作用,掌握常见传感器的工作原理和应用。
技能目标:1. 学生能运用所学知识,分析并解决简单的机器人编程问题。
2. 学生能在小组合作中,进行有效沟通,共同完成机器人项目的搭建和调试。
3. 学生能运用创新思维,设计和改进简单的机器人功能。
情感态度价值观目标:1. 学生对机器人技术产生兴趣,培养探索精神和动手能力。
2. 学生在团队合作中,学会尊重他人,培养合作意识和团队精神。
3. 学生关注机器人技术的发展,认识到其在社会进步中的重要作用,树立正确的科技观。
课程性质:本课程为机器人导论,旨在让学生了解机器人基本概念、技术原理和应用领域,培养其创新思维和动手能力。
学生特点:六年级学生具备一定的逻辑思维能力和动手操作能力,对新鲜事物充满好奇心,善于合作和分享。
教学要求:结合学生特点和课程性质,注重理论与实践相结合,以项目驱动、任务导向的方式进行教学,鼓励学生主动探索、创新实践。
在教学过程中,关注学生的学习成果,及时进行评估和反馈,以提高教学效果。
二、教学内容本课程教学内容分为以下几个部分:1. 机器人基本概念:介绍机器人的定义、分类、应用领域和发展历程,对应教材第一章。
2. 机器人编程原理:讲解机器人编程的基本概念、编程语言和编程逻辑,对应教材第二章。
3. 机器人传感器:介绍传感器的作用、类型和工作原理,以及常见传感器的应用,对应教材第三章。
4. 机器人项目实践:结合所学知识,进行机器人编程、搭建和调试的实践活动,对应教材第四章。
具体教学安排如下:第一周:机器人基本概念(第一章)第二周:机器人编程原理(第二章)第三周:机器人传感器(第三章)第四周:机器人项目实践(第四章)教学内容注重科学性和系统性,以教材为基础,结合实际案例,使学生能够逐步掌握机器人相关知识和技能。
机器人导论

机器人导论课后学习13301084-钟奎(1)ARM的发展简史ARM最早于1990年由Acorn改组而来,之前Acorn时期开发出自己第一代32位、6MHz、3.0μm处理器,即ARM1,并用它做出一台 RISC指令集的计算机,也就是说当时还是在沿袭传统的方式,自己设计芯片出售芯片,早期使用Acorn 芯片产品的包括苹果的Newton pad等。
RISC 即精简指令集计算机,起初为达到降低售价把面积设计的小,功耗低是顺带的优势,而价格低廉功耗少天然适合移动设备,1990年11月,从苹果获得150万英镑投资,从VLSI获25万英镑投资,Acorn则是12个工程师和作价150万英镑的IP,外加一个办公的谷仓,重组后的Acorn开启世界标准之旅。
初创时期的ARM没有商业经验没有管理经验,当然也没有世界标准这种愿景,运营资金紧张,工程师人心惶惶,最后ARM决定自己不生产芯片,转而以授权的方式将芯片设计方案转让给其他公司,即“Partnership”开放模式,公司在1993年实现盈利,1998年纳斯达克和伦敦证券交易所两地上市,同年基于ARM 架构芯片出货达5000万片。
进入2000年,开始受益于手机以及其他电子产品的迅速普及,ARM系列芯片呈爆炸性增长,2001年11月出货量累积突破十亿片,2011年基于ARM系列芯片单年出货79亿片,年营收4.92亿英镑(合7.85亿美元),净利润1.13亿英镑。
ARM 的发展代表了半导体行业某种趋势,即从完全的垂直整合到深度的专业化分工,70年代半导体行业普遍采用上中下游的垂直整合封闭式生产体系,80年代开始半导体行业开始分化,出现垂直整合和分工化的系统制造、定制集成等两个体系,台积电的晶圆代工模式进一步推动了专业分工的发展,半导体行业分工进一步细化,形成IP、设计、晶圆、封装价上下游体系,ARM处于价值链顶端。
(2)STM32系列微控制器的特点STM32系列给MCU用户带来了前所未有的自由空间,提供了全新的32位产品选项,结合了高性能、实时、低功耗、低电压等特性,同时保持了高集成度和易于开发的优势。
机器人学导论课件
如,atan2(-2,-2)=-135,而Atan2(2,2)=45
9
等效轴角坐标系表示法
r11 r12 r13
A
B
RK
r21
r22
r23
r31 r32 r33
Acos r11 r22 r33 1
2
Kˆ
1
2 sin
r32 r13 r21
r23
r31
r12
10
第二章作业:2.4, 2.6, 2.12, 2.13, 2.21, 2.22 , 2.27,2.32,2.37
(4){P}沿zi轴移动di得到坐标系{i};
RZ ( i )
DZ ( di )
T i1 i
RX
(i1) DX
(ai1) RZ
(i ) DZ (di )
{P}
相对于 动坐标 系,遵 循“右 乘”
15
3.6 典型机器人运动学举例
1.确定D-H坐标系
2.确定各连杆D-H参数 和关节变量
i ai-1
nx ox
06T
01T
61T
ny
nz 0
oy oz 0
nx c1[c23(c4c5c6 s4s6 ) s23s5c6 ] s1(s4c5c6 c4s6 )
ny s1[c23(c4c5c6 s4s6 ) s23s5c6 ] c1(s4c5c6 c4s6 )
ax px
ay
p
y
sP1 s X1, sY1, sZ1 T
mP2 m X 2 , mY2 , mZ2 T
sP2 s X 2 , sY2 , sZ2 T
mP3 m X 3, mY3, mZ3 T
sP3 s X 3, sY3, sZ3 T
第五讲 机器人运动学

3.2.2 机器人运动学方程
为什么求正运动学问题的解? 检验、校准机器人;计算工作空间等。 为什麽研究逆运动学问题解? 路径规划、机器人控制等,但求解困难。 机器人正运动学问题的特点: 求解容易,具有唯一性。 机器人逆运动学问题的特点: 1、一般求解方程组是由一些非线性的、 超越、难解的方程组成。 2、必须关心解的存在性、多解性、可解 性和求解方法。
移动关节(P): 没有轴,只有方向。
转动关节(R): 有转动轴。 手部或末端执行器: 机座或基础连杆:
3.2 机器人运动学方程
机器人运动功能符号
3.2.1 D-H描述法
在机器人学中为什么采用D-H描述 方法? 1、物理意义明确。 2、对应的变换矩阵简单。 3、方法简单,使用面广,便于 交流。
3.2.1 D-H描述法
3、求解相邻杆件的位姿矩阵
III、相邻杆件的位姿矩阵
相对运动,用右乘
M i 1 i ( M a M b ) ( M c M d ) cos i si n i 0 0 cos i si n i 0 0 si n i 0 1 0 0 li cos i 0 0 0 cos i si n i 0 0 1 d i 0 si n i cos i 0 0 0 1 0 0 0 1 si n i cos i si n i si n i l i cos i cos i cos i cos i si n i l i si n i si n i cos i di 0 0 1 0
2、建立坐标系
1)杆件坐标系{i},i=1,2,…,n zi轴与关节轴线重合, zi轴的正方向没 有明确规定,应尽可能一致;移动关节只 定义了方向,zi轴可以位于平行于移动方 向的任意位置,通常取移动关节的中心。 由于每个连杆有两条轴线,根据坐标系 的zi轴与那条关节轴线一致,建立杆件坐 标系可有两种做法: 第一种: zi轴与i+1关节轴线重合,称前 置模式。 第二种: zi轴与i关节轴线重合,称后置 模式。
机器人导论
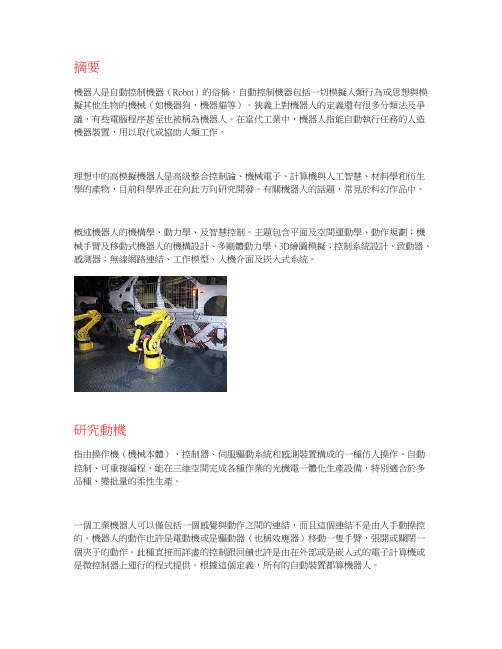
摘要機器人是自動控制機器(Robot)的俗稱,自動控制機器包括一切模擬人類行為或思想與模擬其他生物的機械(如機器狗,機器貓等)。
狹義上對機器人的定義還有很多分類法及爭議,有些電腦程序甚至也被稱為機器人。
在當代工業中,機器人指能自動執行任務的人造機器裝置,用以取代或協助人類工作。
理想中的高模擬機器人是高級整合控制論、機械電子、計算機與人工智慧、材料學和仿生學的產物,目前科學界正在向此方向研究開發。
有關機器人的話題,常見於科幻作品中。
概述機器人的機構學、動力學、及智慧控制。
主題包含平面及空間運動學、動作規劃;機械手臂及移動式機器人的機構設計、多剛體動力學、3D繪圖模擬;控制系統設計、致動器、感測器:無線網路連結、工作模型、人機介面及崁入式系統。
研究動機指由操作機(機械本體)、控制器、伺服驅動系統和感測裝置構成的一種仿人操作、自動控制、可重複編程、能在三維空間完成各種作業的光機電一體化生產設備,特別適合於多品種、變批量的柔性生產。
一個工業機器人可以僅包括一個感覺與動作之間的連結,而且這個連結不是由人手動操控的。
機器人的動作也許是電動機或是驅動器(也稱效應器)移動一隻手臂,張開或關閉一個夾子的動作。
此種直接而詳盡的控制跟回饋也許是由在外部或是嵌入式的電子計算機或是微控制器上運行的程式提供。
根據這個定義,所有的自動裝置都算機器人。
工業機器人可直接接受人類指令,也可以執行預先編排的程序,也可以根據以人工智慧技術制定的原則綱領行動。
工業機器人現狀2007 年全球共新安裝工業機器人114,365 台,較2006 年新安裝的111,052 台,上升了3%。
截至2007 年底,全球工業機器人保有量已達到了995,000 台。
2007 年,亞洲及美洲工業機器人的裝配量明顯上升,汽車工業以及電子電器行業的發展是上述地區工業機器人裝配量強勁增長的主要因素。
此外,化工領域用工業機器人的需求量也迅速上升。
研究目地目的是成為教育和研究領域的領導者。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人导论
王国利
信息科学与技术学院 中山大学
3.3
移动机器人的机动性 /Mobile Robot Maneuverability
影响移动机器人机动能力主要因素包括 遵循侧滑约束对机动能力的限制 转动形成的附加运动自由度
我们重点关注刻画机动性的三个指标
可移动度 可转向度 机动能力
?m
?s
?M ? ?m ? ?s
可移动度/ Degree of Mobility
为了避免侧滑,R(? )??I 需要满足以下约束:
C1 f R(? )??I ? 0
C1s (?s )R(?)??I ? 0
C1(?
s
)
?
? C1 f
??C1Байду номын сангаас (? s
? )??
从数学上讲
R(? )??I 属于投影矩阵 C1(? s ) 的零空间 C1(? s ) 的零空间 N 是有满足一下约束的向量n 组成
运动控制之反馈控制
3.6.2
Feedback Control, Problem Statement
yR
v(t) xR
?
? (t)
start
e
goal
寻找控制矩阵 K , 若存在
开环控制/ Open-Loop Control
基本思想
将轨迹(路径)分割成基本几何形态的若干段
直线或园
控制问题
yI
预先计算光滑的轨迹 基于线段和圆弧
缺点
很多情形预先规划有效的轨迹有相当难度
涉及机器人速度和加速度的限制和约束
无法适应或更正环境动态变化产生
形成的轨迹通常不是光滑的
3.6.1
goa l xI
固定和转向标准轮形成的是非完性整约束
完整性的机器人,当且仅当
DOF= DDOF
全向机器人:DOF= DDOF=3
3.4.2
完整性机器人实例:锁定转向的自行车
两个固定轮的自行车
考虑
yR
{ ? 1,2= ?/2, ? 1=0, ? 2= ? }
侧滑约束退化
工作空间由3D退化成为1D
{ y=0, ? = ?0 } 滚动约束
3.3.3
具有 ?M ? 2 的机器人,其 ICR 总是被约束在一条直线上 具有 ? M ? 3 的机器人,其 ICR 可不受约束的配置在平面上的任意点
同步驱动的案例
?M ? ?m ? ?s ? 1? 1 ? 2
轮子的配置构型 \Wheel Configurations
差动
三轮
3.3.3
同步驱动/Synchro Drive
[ -sin( ? + ?) cos( ? + ?) lcos ? ]R( ?)?I' +r ? ' =0 等价地可以表示成
? =(x/r)+? 0
3.4.2 xR
路径 / 轨迹 : 全向驱动/Omnidirectional Drive
3.4.3
路径 / 轨迹 : 双转向/Two-Steer
3.4.3
移动自由度/DOF degrees of freedom: 机器人姿态可达的能力
?微分自由度/DDOF differentiable degrees of freedom: 机器人路径可达的能力
DDOF ? ?m ? DOF
?完整性机器人 完整性运动学约束可以显式的表示成仅是位置变量的函数 非完整约束需要微分关系, 例如位置变量的导数
机器人的底盘运动学由一组独立的约束组成
rank ?C1(?s )?
C,1(? s ) 秩越大, 移动受到的约束越多
? ? ? 从数学上来讲
? m ? di N?C1(ms )?? 3 ? rank ?C1( s )? 0 ? rank ?C1( s )?? 3
无标准轮情形 rank 所有方向都受到约束
0? ?s ? 2
实例 单个转向轮:三轮移动平台 两个转向轮: 不再允许有无固定的标准轮 车(Ackermann 转向): N f = 2, N s= 2 ? 公用轴
3.3.2
机器人的机动性 /Robot Maneuverability
机动程度
?M ? ?m ? ?s
具有同样 ? M 未必是相同的 例如: 差动机器人和三轮机器人
具体在移动环境中如何体现?
车辆实例
工作空间
机器人如何在工作空间中两个不同的构型移动?
?机器人独立可达到的速度
= 微分自由度(differentiable degrees of freedom ,DDOF) = ?m
自行车:
DDOF = 1; DOF=3
全向小车:
DDOF=3; DOF=3
3.4.1
移动机器人工作空间: 自由度和完整性 Degrees of Freedom, Holonomy
3.5
运动学的支撑环境 /Beyond Basic Kinematics
动力学约束
动力化
能控性
3.6
运动控制/Motion Control (kinematic control)
运动控制的任务 调节问题:实现一个状态到另一个状态的转移控制 跟踪控制:跟踪位置和速度描述的作为时间函数的运动轨迹
运动控制的难点 运动控制由于机器人的非完整性约束变得难以处理 已经有很多有效的解决非完整约束系统运动控制的策略 大多数运动控制系统不考虑移动机器人的动力学特性
C1(?s ) ?n ? 0
几何上可以理解为瞬时旋转中心
(Instantaneous Center of Rotation , ICR)
3.3.1
瞬时旋转中心/ Instantaneous Center of Rotation
Ackermann Steering
Bicycle
3.3.1
可移动度/More on Degree of Mobility
?Cr1a(n?ks?C)?1?(
0
?s
)??
3
例如
单轮: 仅有一个固定的标准轮
差动: 两个固定标准轮(详见黑板上讨论)
沿同一轴部署
沿不同轴部署
3.3.1
可转向度/ Degree of Steerability
间接地运动自由度
? ? s ? rank ?C1s ( s )?
任何瞬时的特定方位施加的运动学约束 方位改变可以提供附加的机动能力 ? s 的范围:
?M ? ?m ? ?s ? 1 ? 1 ? 2
3.3.3
基本三轮构型
3.3.3
Five Basic Types of Three-Wheel Configurations
工作空间:自由度 Mobile Robot Workspace: Degrees of Freedom
机动性等效移动的自由度 (degree of freedom, DOF)