各种电气控制原理图和实物接线图及直流电动机其线圈绕线方法
15种经典电路接线图,老师傅一般不教!

15种经典电路接线图,老师傅一般不教!一、两台电动机顺序启动和顺序停止控制电路接线图有些生产机械需要两台电动机按先后顺序起动,并且按顺序停止。
如下图所示电路中,两台电动机起动和停止的动作顺序为:电动机M1先起动,M2才能起动;停止时,M2先停止,M1才能停止。
当合上电源开关Q,按下起动按钮SB1时,接触器KM1的线圈得电并自锁。
电动机M1起动运转。
这时再按下起动按钮SB2,接触器KM2才能得电并自锁,电动机M2起动运转。
当需要停止时,必须先按下停止按钮SB3, KM2断电释放,M2停止运转。
KM2断电释放的同时,并联在停止按钮SB两端的常开触点断开,这时再按下SB, KM1断电释放,M1停止转动。
本电路适用于需两台电动机按顺序起动和停止的生产机械。
如铣床的主轴电动机和进给电动机控制。
二、双速异步电动机启动控制电路接线图双速异步电动机改变转速可采用改变绕组的接线方法来实现。
如下图所示的电路接线图中,KM1为电动机三角形连接接触器,KM2、KM3为双星形连接接触器,SB2为低速起动按钮,SB3为高速起动按钮。
合上电源开关Q,按下起动按钮SB2,接通接触器线圈KM1电源,同时切断接触器KM2、KM3的电源,接触器KM1得电并自锁,使电动机定子绕组接成三角形,按低速起动运转。
如需电动机高速运转,可按下按钮SB3, KM1的线圈断电释放,主触点断开,自锁触点断开,互锁触点闭合。
当SB3按到底时,SB3的常开触点闭合,接触器KM2、KM3线圈同时得电,经KM2、KM3常开触点串联组成的自锁电路自锁,KM2、KM3主触点闭合,将电动机定子绕组接成双星形,以髙速度运转。
本电路可直接按下SB3,使定子绕组接成双星形,以高速度运转。
按下SB1电动机停止旋转。
三、绕线转子异步电动机转子串联电阻启动控制电路如下图所示电路为按电流原则短接电动机转子启动电阻控制电路接线图。
它是运用电流继电器来检测电动机转子电流,根据电动机在起动过程中,转子电流变化来实现转子电阻的短接控制。
各类电气控制接线图75种
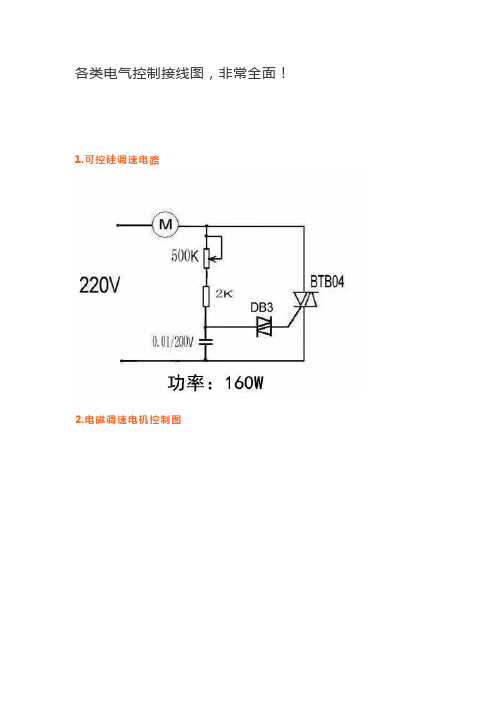
各类电气控制接线图,非常全面!1.可控硅调速电路2.电磁调速电机控制图3.三相四线电度表互感器接线4.能耗制动5.顺序起动,逆序停止6.锅炉水位探测装置7.电机正反转控制电路8.电葫芦吊机电路9.单相漏电开关电路10.单相电机接线图11.带点动的正反转起动电路12.红外防盗报警器13.双电容单相电机接线图14.自动循环往复控制线路15.定子电路串电阻降压启动控制线16.按启动钮延时运行电路17.星形- 三角形启动控制线路18.单向反接制动的控制线路19.具有反接制动电阻的可逆运行反接制动的控制线路20.以时间原则控制的单向能耗制动线路21.以速度原则控制的单向能耗制动控制线路22.电动机可逆运行的能耗制动控制线路23.双速电动机改变极对数的原理24.双速电动机调速控制线路25.使用变频器的异步电动机可逆调速系统控制线路26.正确连接电器的触点27.线圈的连接28.继电器开关逻辑函数29.三相半波整流电路图30.三相全波整流电路图31.三相全波6脉冲整流原理图32.六相12脉冲整流原理图33.负载两端的电压在一个周期中,每个二极管只有三分这一的时候导通(导通角为120度)。
负载两端的电压为线电压。
34.直流调速原理功能图35.电动机接线一般常用三相交流电动机接线架上都引出6个接线柱,当电动机铭牌上标为Y形接法时,D6、D4、D5相连接,D1~D3接电源;为△形接法时,D6与D1连接,D4与D2连接,D5与D3连接,然后D1~D3接电源。
可参见图1所示连接方法连接。
36.三相吹风机接线有部分三相吹风机有6个接线端子,接线方法如图2所示。
采用△形接法应接入220V三相交流电源,采用Y形接法应接入380V 三相交流电源。
一般3英寸、3.5英寸、4英寸、4.5英寸的型号按此法接。
其他吹风机应按其铭牌上所标的接法连接。
37.单相电容运转电动机接线单相电动机接线方法很多,如果不按要求接线,就会有烧坏电动机的可能。
直流电动机控制电路

直流电动机控制电路一、直流电动机的启动1.并励直流电动机的启动并励直流电动机的启动控制电路如图1-15所示。
图中,KA1是过电流继电器,作直流电动机的短路和过载保护。
KA2欠电流继电器,作励磁绕组的失磁保护。
启动时先合上电源开关QS,励磁绕组获电励磁,欠电流继电器KA2线圈获电,KA2常开触点闭合,控制电路通电;此时时间继电器KT线圈获电,KT常闭触点瞬时断开。
然后按下启动按钮SB2,接触器KM1线圈获电,KM1主触点闭合,电动机串电阻器R启动;KM1的常闭触点断开,KT线圈断电,KT常闭触点延时闭合,接触器KM2线圈获电,KM2主触点闭合将电阻器R短接,电动机在全压下运行。
2. 他励直流电动机的启动(见图1-16)图1-15 并励直流电动机启动控制电路图1-16 他励直流电动机启动控制电路3. 串励直流电动机的启动(见图1-17)图1-17 串励直流电动机启动控制电路请注意,串励直流电动机不允许空载启动,否则,电动机的高速旋转,会使电枢受到极大的离心力作用而损坏,因此,串励直流电动机一般在带有20%~25%负载的情况下启动。
二、直流电动机的正、反转1.电枢反接法这种方法是改变电枢电流的方向,使电动机反转。
并励直流电动机的正、反转控制电路如图1-18所示。
启动时按下启动按钮SB2,接触器KM1线圈获电,KM1常开触点闭合,电动机正转。
若要反转,则需先按下SB1,使KM1断电,KM1连锁常闭触点闭合。
这时再按下反转按钮SB3,接触器KM2线圈获电,KM2常开触点闭合,使电枢电流反向,电动机反转。
2.磁场反接法这种方法是改变磁场方向(即励磁电流的方向)使电动机反转。
此法常用于串励电动机,因为串励电动机电枢绕组两端的电压很高,而励磁绕组两端的电压很低,反转较容易,其控制电路如图1-19所示。
其工作原理同上例相似,请自己分析。
图1-18并励直流电动机正,反转控制电路图1-19串励电动机正,反转控制电路三、直流电动机的制动在实际生产中有时要求机械能迅速停转,这就要求直流电动机可以制动。
电机接线图

CREATE TOGETHER
谢谢观看
THANK YOU FOR WATCHING
DOCS
• 符号标识检查:检查接线图中的符号标识是否规范,无错误
• 接线方式检查:检查接线图中的接线方式是否与实际接线一致,无误差
修改方法
• 修改错误:发现接线图中的错误后,及时进行修改
• 优化布局:对接线图进行布局优化,提高可读性
• 更新信息:根据实际接线情况,更新接线图中的信息
04
电机接线图的分析与解读
电机接线图的分析方法与技巧
分析方法
• 绕组接线分析:分析电机绕组的接线方式,了解电机的运行原理
• 外部接线分析:分析电机外部的接线方式,了解电机的控制方式
• 电路分析:根据接线图进行电机的电路分析,了解电机的性能特点
技巧
• 熟悉电气符号:熟悉常用的电气符号,便于分析和解读
• 理解接线图:理解接线图中的电气连接关系,便于分析
• 注意接线方式:注意接线图中的接线方式,防止误读和误解
电机接线图的解读实例
• 实例
• 直流电机接线图分析:分析直流电机的绕组接线和外部接线
• 交流电机接线图分析:分析交流电机的绕组接线和外部接线
• 伺服电机接线图分析:分析伺服电机的绕组接线和外部接线
• 步进电机接线图分析:分析步进电机的绕组接线和外部接线
技巧
电机接线图的绘制步骤与注意事项
绘制步骤
• 确定电机类型:根据电机类型选择相应的接线图模板
• 绘制绕组接线:按照电机绕组的实际接线方式绘制接线图
• 绘制外部接线:按照电机外部的实际接线方式绘制接线图
• 添加注释和标识:在接线图上添加必要的注释和标识
注意事项
4种直流电机控制电路详解,含图
4种直流电机控制电路详解,含图含公式,直观又细致,不懂都难!旺材电机与电控2小时前私信“干货”二字,即可领取138G伺服与机器人专属及电控资料!直流电机在家用电器、电子仪器设备、电子玩具、录相机及各种自动控制中都有广泛的应用。
但对它的使用和控制,很多读者还不熟悉,而且其技术资料亦难于查找。
直流电机控制电路集锦,将使读者“得来全不费功夫”!在现代电子产品中,自动控制系统,电子仪器设备、家用电器、电子玩具等等方面,直流电机都得到了广泛的应用。
大家熟悉的录音机、电唱机、录相机、电子计算机等,都不能缺少直流电机。
所以直流电机的控制是一门很实用的技术。
本文将详细介绍各种直流电机的控制技术。
直流电机,大体上可分为四类:第一类为有几相绕组的步进电机。
这些步进电机,外加适当的序列脉冲,可使主轴转动一个精密的角度(通常在1.8°--7.5°之间)。
只要施加合适的脉冲序列,电机可以按照人们的预定的速度或方向进行连续的转动。
步进电机用微处理器或专用步进电机驱动集成电路,很容易实现控制。
例如常用的S A A l027或S A A l024专用步进电机控制电路。
步进电机广泛用于需要角度转动精确计量的地方。
例如:机器人手臂的运动,高级字轮的字符选择,计算机驱动器的磁头控制,打印机的字头控制等,都要用到步进电机。
第二类为永磁式换流器直流电机,它的设计很简单,但使用极为广泛。
当外加额定直流电压时,转速几乎相等。
这类电机用于录音机、录相机、唱机或激光唱机等固定转速的机器或设备中。
也用于变速范围很宽的驱动装置,例如:小型电钻、模型火车、电子玩具等。
在这些应用中,它借助于电子控制电路的作用,使电机功能大大加强。
第三类是所谓的伺服电机,伺服电机是自动装置中的执行元件,它的最大特点是可控。
在有控制信号时,伺服电机就转动,且转速大小正比于控制电压的大小,除去控制信号电压后,伺服电机就立即停止转动。
伺服电机应用甚广,几乎所有的自动控制系统中都需要用到。
电动机常用原理接线图
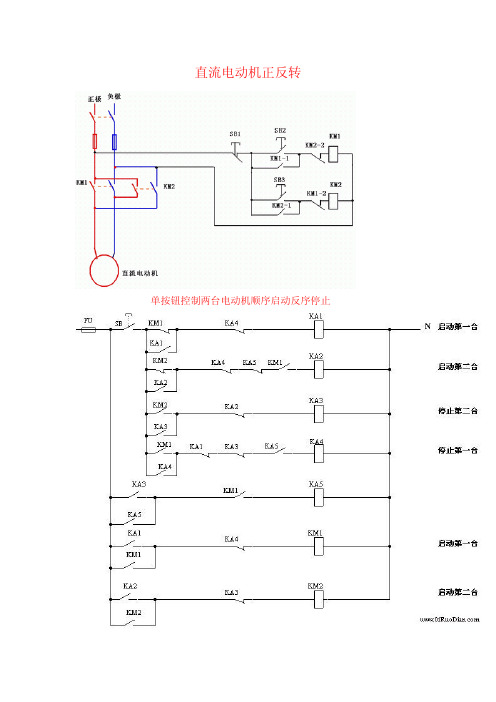
直流电动机正反转单按钮控制两台电动机顺序启动反序停止三相异步鼠笼电动机电容制动控制电路图用两个时间继电器控制电动机间歇正反转三地控制三相电动机正反转两地控制一台电动机频敏变阻启动原理图用一个时间继电器,和三个按钮,控制一个灯220和电机380,要求电机能自动运行60秒停止接近开关导通后电机停止接近开关断开后延时N秒电机启动运用时间继电器使电磁铁动作2秒后复位,经过3分钟后动作2秒后复位,再经过5分钟后动作2秒复位利用电接点压力表自动控制水泵两台电动机既可分别启动和停止,也可以同时启动和停止.正转停止后,必须过预定的时间(如5S)后才能反转,反转停止后,必须过预定的时间(如5S)后才能正转用三个时间继电器控制正反转并要有间隙三相异步电动机转子串联电阻启动三相异步电动机启动控制线路图(带故障指示灯)电机有点动还有正常运行用3个继电器控制电动机断相保护用四个时间继电器控制正反转并要有间隙点动与长动的正反转控制电路二台电机按时间顺序起动由时间控制反序停止缺相保护原理图原理:运行中的三相380伏电动机缺一相电源后,变成两相运行,如果运行时间过长则有烧毁电动机的可能。
为了防止缺相运行烧毁电动机,可以采用多种保护方案。
下图为一种三相电动机断相保护电路,当电动机运行时发生断相后三相电压不平衡,桥式整流则有电压输出,当输出的直流电压达到中间继电器KA动作值时,KA动作,于是与自锁触点串联的常闭触点断开,使KM线圈断电其主触头全部释放,电动机停止。
电动机可逆带限位控制电路原理图控制两台电机,第一台启动后第二台才能启动,第一台停止后第二台才能停止电路图三台电动机顺序启动反序停止工作原理在正常情况下,按下启动按钮SB1,电流通过按钮到时间继电器KT5的常闭触头KT4-1(因为时间继电器此时没有工作常闭触头KT5-1是闭合导通的)到交流接触器线圈KM1形成回路,接触器主触头闭合机械泵得电开始运行,同时接触器辅助触头KM1-1闭合,接触器长期得电保持、时间继电器KT1也得电开始计时为旋转阀的启动做准备,当KT1达到设定时间后,时间继电器延时闭合的常开触头KT1-1闭合接通交流接触器KM2线圈、时间继电器KT2,接触器KM2主触头闭合,旋转阀得电运行,时间继电器KT2开始计时为KM3的启动做准备同时交流接触器辅助触头KM2-1、KM2-2动作,KM2-1闭合,KM2长期保持,KM2-2断开,切断时间继电器KT1,使时间继电器停止工作;当KT2达到设定时间后,时间继电器延时闭合的常开触头KT2-1闭合接通交流接触器KM3线圈,接触器KM3主触头闭合,压缩机得电运行,同时接触器辅助触头KM3-1闭合,接触器长期得电保持。
电工必备|54种电动机电气控制电路接线图安全知识值得收藏!

电工必备|54种电动机电气控制电路接线图安全知识值得收藏!三相电动机接线图,电动机接线图,三相电机接线图延时打开应用保存高清大图一、触电事故与触电急救1、电气事故分析(1)电气事故种类:电流伤害事故、电气设备事故、电磁场伤害事故、雷电事故、静电事故及电气火灾和爆炸事故。
(2)触电事故原因:缺乏电气安全知识;违反安全操作规程;电气设备、线路不合格;维修不善;偶然因素。
2、电流对人体的作用(1)触电的种类:单相触电;两相触电;跨步电压触电。
(2)对工频电而言:感知电流:成年男性约为1.1毫安,成年女性为0.7毫安。
摆脱电流:成年男性约为16毫安,女性为10.5毫安。
从安全的角度考虑,取概率为0.5%时人的摆脱电流作为最小摆脱电流,男性为9毫安,女性为6毫安。
3、安全电压(1)允许电流:男性为9毫安,女性为6毫安。
(2)人体电阻:1000~2000欧。
(3)安全电压值:42,36,24,12,6伏。
(4)安全电压的供电电源:由特定电源供电,包括独立电源和安全隔离变压器(由安装在同一铁芯上的两个相对独立的线圈构成)。
自耦变压器、分压器和半导体装置等不能作为电压的供电电源。
(5)安全电压回路必须具备的条件:Ⅰ、供电电源输入输出必须实行电路上的隔离;Ⅱ、工作在安全电压下的电路,必须与其它电气系统无任何电气上的联系(不允许接地,但安全隔离变压器的铁芯应该接地);Ⅲ、采用24V以上的安全电压时,必须采取防止直接接触带电体的保护措施,不允许有裸露的带电体;Ⅳ、线路符合下列条件:部件和导线的电压等级至少为250V,安全电压用的插头,就不能插入较高电压的插座。
4、触电急救现场挽救要点:迅速脱离电源;准确实行救治(人工呼吸和胸外心脏挤压);就地进行抢救;救治要坚持到底。
二、直接接触的防护措施1、直接接触防护措施的种类绝缘、屏护、间距、采用安全电压、限制能耗、电气联锁、安装漏电保护器。
2、绝缘(1)绝缘材料电阻率一般为10^9厘米以上。
最常用的电气回路讲解,包含原理图和接线图,电气入门必备!

最常用的电气回路讲解,包含原理图和接线图,电气入门必备!电动机正反转控制属于最常见的电气应用知识,在本文详细介绍电动机正反转控制电路原理及相关知识。
接触器连锁正反转控制线路的主电路中连接了两个接触器,正反转操作元器件放置在控制回路中,因此工作安全可靠。
接触器连锁正反转控制线路如图1所示。
图1 接触器连锁正反转控制线路(电路图读者需要结合电气图形符号和电气文字符号来学习)在图1中,主电路中连接了接触器KM1和接触器KM2,两个接触器主触点连接方式不同,KM1按L1-U、L2-V、L3-W方式连接,KM2按L1-W、L2-V、L3-U方式连接。
在工作时,接触器KM1、KM2主触点严禁同时闭合,否则会造成L1、L3两相电源直接短路。
为了避免KM1、KM2主触点同时得电闭合,分别给其各自的线圈串接了对方的常闭辅助触点,当一个接触器的线圈得电时会使自己的主触点闭合,还会使自己的常闭触点断开,这样另一个接触器线圈就无法得电。
接触器的这种相互制约关系称为接触器的连锁(也称互锁、联锁),实现联锁的常闭辅助触点称为连锁触点。
电动机正反转控制线路工作原理分析如下:1、闭合电源开关QS2、正转过程①正转联锁控制按下正转按钮速SB1→KM1线圈得电→KM1主触点闭合、KM1常开辅助触点闭合、KM1常闭辅助触点断开→KM1主触点闭合将L1、L2、L3三相电源分别供给电动机U、V、W端,电动机正转;KM1常开辅助触点闭合使得SB1松开后KM1线圈继续得电(接触器自锁);KM1常闭辅助触点断开切断KM2线圈的供电,使KM2主触点无法闭合,实现KM1、KM2之间的连锁。
②停止控制按下停转按钮SB3→KM1线圈失电→KM1主触点断开、KM1常开辅助触点断开、KM1常闭辅助触点闭合→KM1主触点断开使电动机断电而停转。
3、反转过程①反转连锁控制按下反转按钮SB2→KM2线圈得电→KM2主触点闭合、KM2常开辅助触点闭合、KM2常闭辅助触点断开→KM2主触点闭合将L1、L2、L3三相电源分别供给电动机W、V、U端,电动机反转;KM2常开辅助触点闭合SB2松开后KM2线圈继续得电;KM2常闭辅助触点断开切断KM1线圈的供电,使KM1主触点无法闭合,实现KM1、KEM2之间的连锁。
各种电气控制原理图和实物接线图及直流电动机其线圈绕线方法..

电动机控制原理图和实物接线图及直流电动机其线圈绕线方法大连安大制冷设备服务有限公司大连安大制冷设备服务有限公司大连安大制冷设备服务有限公司大连安大制冷设备服务有限公司大连安大制冷设备服务有限公司大连安大制冷设备服务有限公司大连安大制冷设备服务有限公司大连安大制冷设备服务有限公司大连安大制冷设备服务有限公司大连安大制冷设备服务有限公司三、电动机一: 2极电机。
转速2950转4极电机。
转速1470转6极电机。
转速750转8极电机。
转速500转二: 1、电机的级数实际上反映的就是电机的同步转数,如级数为2级的电机,同步转数为2900rpm,4级的为1450rpm,6级则为1000rpm,8级为750rpm。
2、对于电机级数的选择,主要根据电机驱动机械设备对电机输出转数的要求;如减速机输入转数的要求、皮带转动主动轮的转数要求等。
一般是经过实际所需转数,考虑传动比因素返算所得。
三:极数反映出电动机的同步转速,2极同步转速是3000r/min,4极同步转速是1500r/min,6极同步转速是1000r/min,8极同步转速是750r/min。
绕组的一来一去才能组成回路,也就是磁极对数,是成对出现的,极就是磁极的意思,这些绕组当通过电流时会产生磁场,相应的就会有磁极。
三相交流电机每组线圈都会产生N、S磁极,每个电机每相含有的磁极个数就是极数。
由于磁极是成对出现的,所以电机有2、4、6、8……极之分。
就普通三相异步交流电动机来说,它的磁极对数影响了它的转速,转速=(电源频率×60)÷磁极对数×(1-转差率)。
在理想的同步状态下,转速=电源频率×60÷磁极对数。
实际情况下,电机转速不可能达到同步状态,也就是存在转差率。
比如二极电机,它的极对数是1,那么它的同步转速就是50×60÷1=3000,然后由于转差率的不同,二极电机转速就有2960,2940等转速,同样八极电机的转速<750,转差率不一样,实际转速稍有出入。
常用电机控制电路图

THANKS FOR WATCHING
感谢您的观看
单相电机的正反转控制电路
总结词
通过改变电机绕组的电流方向实现正反 转。
VS
ቤተ መጻሕፍቲ ባይዱ
详细描述
在单相电机控制电路中,可以通过改变电 机绕组的电流方向来实现正反转控制。通 常使用两个开关来控制电机绕组的电流方 向,当开关接通时,电机向一个方向转动 ,当开关断开时,电机向另一个方向转动 。
04 直流电机控制电路
常用电机控制电路图
contents
目录
• 电机控制电路基础知识 • 三相异步电机控制电路 • 单相电机控制电路 • 直流电机控制电路 • 电机保护电路
01 电机控制电路基础知识
电机控制电路的基本组成
电源
为整个电路提供电能,通常为 直流或交流电源。
控制元件
如继电器、接触器、光耦合器 等,用于控制电机的启动、停 止和调速。
直接启动控制电路
通过开关或接触器直接将电机接入电 源,实现电机的启动。这种方式电路 简单,但启动电流大,只适用于小容 量电机。
三相异步电机的正反转控制电路
正反转控制方式总结
三相异步电机的正反转控制主要采用倒顺开关和交流接触器两 种方式。倒顺开关操作简单,但只适用于小容量电机;交流接
触器则适用于各种容量的电机。
倒顺开关正反转控制电路
通过改变电源相序,实现电机的正反转。这种方式操作简 单,但只适用于小容量电机,且不能实现自动化控制。
交流接触器正反转控制电路
通过两个交流接触器分别控制电机的正转和反转,实现电机的 正反转控制。这种方式可以实现自动化控制,适用于各种容量
的电机。
三相异步电机的调速控制电路
调速方式总结
干货丨12种常用的电气设备接线图

干货丨12种常用的电气设备接线图电动机接线一般常用三相交流电动机接线架上都引出6个接线柱,当电动机铭牌上标为Y形接法时,D6、D4、D5相连接,D1~D3接电源;为△形接法时,D6与D1连接,D4与D2连接,D5与D3连接,然后D1~D3接电源。
可参见图1所示连接方法连接。
图1三相交流电动机Y形和△形接线方法三相吹风机接线有部分三相吹风机有6个接线端子,接线方法如图2所示。
采用△形接法应接入220V三相交流电源,采用Y形接法应接入380V三相交流电源。
一般3英寸、3.5英寸、4英寸、4.5英寸的型号按此法接。
其他吹风机应按其铭牌上所标的接法连接。
图2三相吹风机六个引出端子接线方法单相电容运转电动机接线单相电动机接线方法很多,如果不按要求接线,就会有烧坏电动机的可能。
因此在接线时,一定要看清铭牌上注明的接线方法。
图247为IDD5032型单相电容运转电动机接线方法。
其功率为60W,电容选用耐压500V、容量为4μF的产品。
图3(a)为正转接线,图3(b)为反转接线。
图3IDD5032型单相电容运转电动机接线方法单相电容运转电动机接线图4JX07A-4型单相电容运转电动机接线方法图4是JX07A-4型单相电容运转电动机接线方法。
电动机功率为60W,用220V/50Hz交流电源、电流为0.5A。
它的转速为每分钟1400转。
电容选用耐压400~500V、容量8μF的产品。
图4(a)为正转接线,图4(b)为反转接线。
单相吹风机接线图5单相吹风机四个引出端子接线方法有的单相吹风机引出4个接线端子,接线方法如图5所示。
采用并联接法应接入110V交流电源,采用串联接法应接入220V交流电源。
Y100LY系列电动机接线目前,Y系列电动机被广泛应用。
Y系列电动机具有体积小、外形美观、节电等优点。
它的接线方式有两种:一种为△形,它的接线端子W2与U1相连,U2与V1相连,V2与W1相连,然后接电源;另一种为Y形,接线端子W2、U2、V2相连接,其余3个接线端子U1、V1、W1接电源。
最新常用电机控制电路图PPT课件

SB1 SB2 KM1 KM2 KM3 KM4
KT1 KT2 KT3
(b)电路 之
改进: 逐步 退出 KT1、
KM2、 KT2、 KM3、
KT3
FR SB1
SB2
KM1
KM2
KT1 KM2 KT2 KM3 KT3 KM4
KM3
KM4
KM1 KT1 KM2 KT2 KM3 KT3 KM4
图2-15(c)
a.改变极对数p——变极调速; b.改变转差率S——串级调速; c.改变频率f—变频调速。
下面介绍鼠笼式交流电动机变极调速及绕线型电 动机在转子中分级串电阻调速。
变极调速控制线路 这一线路的设计思想是通过改变电机绕组的接线方
式来达到调速目的。速度的调节即接线方式的改变, 也是采用时间继电器按照时间原则来完成的。 变极电动机一般有双速、三速、四速之分,双速电 动机定子装有一套绕组,三速、四速则为两套绕组。
KM3 2R
I < KI3
KM2 1R
I < KI1
2、按电流原则控制
FR SB1
SB2
KM1
KA KI1
KM1
KI2
KI2
KM1
KA KM2 KM3 KT4
图2-16电流原则控制转子电路串电阻起动
控制线路
2.2 鼠笼式异步电动机的制动控制线路
制动方式有电气的方法和电气机械结合的方法。前 者如反接制动,能耗制动;后者如电磁机械抱闸。
SB2
KT
KM2
KT
KM1 KM2 KT
KA
KM1 KM2 KT
图2-8(b-2)KM1退出带来的自锁回路的改变,
采用KA触点扩展
采用KT瞬时动作触点
直流电动机常见控制线路
按下启动按钮SB1,接触器KM1线圈通电吸合并自锁,电动机在串 入全部启动电阻情况下降压起动。同时,由于接触器KM1的常闭触点断 开,使时间继电器KT1和KT2线圈断电。经一段延时候,其中KT1的常 闭延时闭合触点首先闭合,接触器KM2线圈通电,其常开触点闭合,将 启动电阻R1短接,电动机继续加速。然后,KT2常闭延时闭合触点延时 闭合,接触器KM3通电吸合,将电阻R2短接,电动机启动完毕,投入正 常运行。
设备控制技术
直流电动机常见控制线路
直流电动机按励磁方式分为他励、并励、串励和复励四种。并励及 他励直流电动机的性能及控制线路相近,他们多用在机床等设备中。在 牵引设备中,则以串励支流电动机应用较多。
直流电动机的控制包括直流电动机的起动、正反转、调速及制动的 控制。
1-1直流电动机的起动控制线路
直流电动机在起动最初的一瞬间,因为电动机的转速等于零,则反 电动势为零,所以电源电压全部施加在电枢绕组的电阻及线路电阻上。 通常这些电阻都是极小的,所以这时流过电枢电流很大,启动电流可达 额定电流的10~20倍。这样大的起动电流将导致电动机转向器和电枢绕 组的损坏,同时大电流产生转矩和加速度对机械传动部件也将产生强烈 的冲击。因此,如外加的是恒定电压,则必须在电枢回路中篡改如附加 电阻来起动,以限制起动电流。
电机控制线路图大全

电机控制线路图大全Y-△(星三角)降压启动控制线路-接触器应用接线图Y-△降压启动适用于正常工作时定子绕组作三角形连接的电动机。
由于方法简便且经济,所以使用较普遍,但启动转矩只有全压启动的三分之…,故只适用于空载或轻载启动。
Y-△启动器有OX3-13、Qx3—30、、Qx3—55、QX3—125型等。
OX3后丽的数字系指额定电压为380V时,启动器可控制电动机的最大功率值(以kW计)。
OX3—13型Y-△自动启动器的控制线路如图11—11所示。
()合上电源开关Qs后,按下启动按钮SB2,接触器KM和KMl线圈同时获电吸合,KM和KMl主触头闭合,电动机接成Y降压启动,与此同时,时间继电器KT的线圈同时获电,I星形—三角形降压起动控制线路星形——三角形降压起动控制线路星形——三角形( Y —△)降压起动是指电动机起动时,把定子绕组接成星形,以降低起动电压,减小起动电流;待电动机起动后,再把定子绕组改接成三角形,使电动机全压运行。
Y —△起动只能用于正常运行时为△形接法的电动机。
1.按钮、接触器控制 Y —△降压起动控制线路图 2.19 ( a )为按钮、接触器控制 Y —△降压起动控制线路。
线路的工作原理为:按下起动按钮 SB1 , KM1 、 KM2 得电吸合, KM1 自锁,电动机星形起动,待电动机转速接近额定转速时,按下 SB2 , KM2 断电、 KM3 得电并自锁,电动机转换成三角形全压运行。
2.时间继电器控制 Y —△降压起动控制线路图 2.19 ( b )为时间继电器自动控制 Y —△降压起动控制线路,电路的工作原理为:按下起动按钮 SB1 , KM1 、 KM2 得电吸合,电动机星形起动,同时 KT 也得电,经延时后时间继电器 KT 常闭触头打开,使得 KM2 断电,常开触头闭合,使得 KM3 得电闭合并自锁,电动机由星形切换成三角形正常运行。
图2定子串电阻降压起动控制线路图2是定子串电阻降压起动控制线路。
常用电动机控制电路原理图
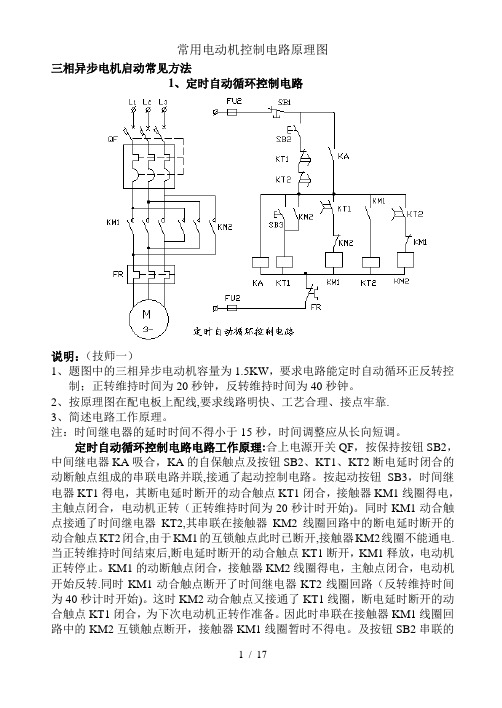
三相异步电机启动常见方法1、定时自动循环控制电路说明:(技师一)1、题图中的三相异步电动机容量为1.5KW,要求电路能定时自动循环正反转控制;正转维持时间为20秒钟,反转维持时间为40秒钟。
2、按原理图在配电板上配线,要求线路明快、工艺合理、接点牢靠.3、简述电路工作原理。
注:时间继电器的延时时间不得小于15秒,时间调整应从长向短调。
定时自动循环控制电路电路工作原理:合上电源开关QF,按保持按钮SB2,中间继电器KA吸合,KA的自保触点及按钮SB2、KT1、KT2断电延时闭合的动断触点组成的串联电路并联,接通了起动控制电路。
按起动按钮SB3,时间继电器KT1得电,其断电延时断开的动合触点KT1闭合,接触器KM1线圈得电,主触点闭合,电动机正转(正转维持时间为20秒计时开始)。
同时KM1动合触点接通了时间继电器KT2,其串联在接触器KM2线圈回路中的断电延时断开的动合触点KT2闭合,由于KM1的互锁触点此时已断开,接触器KM2线圈不能通电.当正转维持时间结束后,断电延时断开的动合触点KT1断开,KM1释放,电动机正转停止。
KM1的动断触点闭合,接触器KM2线圈得电,主触点闭合,电动机开始反转.同时KM1动合触点断开了时间继电器KT2线圈回路(反转维持时间为40秒计时开始)。
这时KM2动合触点又接通了KT1线圈,断电延时断开的动合触点KT1闭合,为下次电动机正转作准备。
因此时串联在接触器KM1线圈回路中的KM2互锁触点断开,接触器KM1线圈暂时不得电。
及按钮SB2串联的KT1、KT2断电延时闭合的动断触点是保证在电动机自动循环结束后,才能再次起动控制电路。
热继电器FR常闭触点,是在电动机过负载或缺相过热时将控制电路自动断开,保护了电动机。
2、顺序控制电路(范例)顺序控制电路(范例)工作原理:图A:KM2线圈电路由KM1线圈电路起动、停止控制环节之后接出.按下起动按钮SB2,KM1线圈得电吸合并自锁,此时才能控制KM2线圈电路。
电工常见电气控制实物接线图原理图
电工常见电气控制实物接线图原理图电气控制是电力系统中非常重要的环节,电工在日常工作中需要掌握电气控制的知识和技能,其中实物接线图和原理图是电气控制中非常重要的一部分。
本文将详细介绍电工常见的电气控制实物接线图和原理图。
一、电气控制实物接线图1.什么是实物接线图?实物接线图是电器设备内部元器件的布局和线路连接关系的图示表示,是电气控制系统的物理表现。
实物接线图是电气控制安装调试、故障排除和保养维修的重要依据,能够清晰明了地反映设备的工作原理和互联关系。
2.实物接线图常用符号在实物接线图中,各种电器元器件均按照标准符号表示。
下面列出几种实物接线图常用的符号:•开关:表示开关或刀闸;•控制器:表示各种控制器,包括继电器、计时器、触发器等;•运动装置:表示各种电机、气动元件等;•信号固化器:表示各种指示灯、蜂鸣器、继电器等;•传感器:表示各种物理量测量传感器、电位器、零位开关等;•仪表:表示各种显示、测量仪表;•电源:表示各种电源、变压器等。
3.实物接线图的组成要素实物接线图由电器元器件符号、导线线路、接点和连接组成,还可以配有附加信息和注释说明。
在实物接线图中,元器件符号由标准符号组成,包括控制元器件、电动元器件、配电元器件、传感器和各种辅助设备元器件等。
导线线路是不同元器件之间的物理连接,线路既表达信号传输的逻辑关系,又引导电能传输,保证正常的电气控制。
接点是对电气信号进行开、闭操作的部件,它们连接或断开电路线上的电气信号。
除了以上组成要素外,实物接线图还可以添加附加信息和注释说明。
附加信息包括元器件的额定电压、电流、功率等参数,注释说明包括连接方式、接线编号和工作模式等。
4.实物接线图的作用实物接线图作为电气控制系统的物理表现,具有以下重要作用:•方便设备的安装调试和维护保养;•保证设备的正常运行和可靠性;•有助于故障排除和分析;•帮助工程师对电器设备进行改款升级。
二、电气控制原理图1.什么是原理图?电气控制原理图是按一定规则,用标记表示各种电器元器件之间的逻辑联系和电气连接关系,以及信号的传递路径。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电动机控制原理图和实物接线图及直流电动机其线圈绕线方法大连安大制冷设备服务有限公司热继电器负载大连安大制冷设备服务有限公司熔断器漏电断路器负载大连安大制冷设备服务有限公司负载大连安大制冷设备服务有限公司大连安大制冷设备服务有限公司 负载停止按钮启动按钮接触器负载大连安大制冷设备服务有限公司负载大连安大制冷设备服务有限公司员载大连安大制冷设备服务有限公司停止按钮芝器• • 0 • •IIBI CJ20-63负载大连安大制冷设备服务有限公司熔断器隔离变压器220V翻・。
热继电器负载停止按钮启动按钮]■大连安大制冷设备服务有限公司顺逆转控制电路 顺启动 逆启动 ■ 111 r K液位继电器自动控制泵水水泵电机JY&7KAMAC r 必三三逆启动行徂开关电机运行限位自动回程昕路器停止按钮启动按钮CJ10-10接触器顺启动顺点动停止顺点动逆点动延时断电停机UIVIW!•MuAjr©,f-!=]~~]m ))4^ w 9・•—* ■ N 屮rtf。
mi⑷・••• FU2 四MH * '币戸r■ 'r i-i U MFL'IT TT®]hMI ® 9$ ® TTT11c d KM2KMKMI KM3KMIiiE 电动机反接制动控制电路lill HI®fKMJTKM4rre 华eeQKM3□KAI KM 33KMiB〒〒〒KMI KM2KM5器卿枫速电动机髓瞬FU2| »<•!TioTI ® a i◎OD DFLUFL2l i ViWtWAiCjc620辅萌黠一:2极电机。
转速2950转4极电机。
转速1470转6极电机。
转速750转8极电机。
转速500转-:1、电机的级数实际上反映的就是电机的同步转数,如级数为2级的电机,同步转数为290(kpm,4级的为1450rpm, 6级则为1000rpm, 8级为750rpm □2、对于电机级数的选择,主要根据电机驱动机械设备对电机输出转数的要求:如减速机输入转数的要求、皮带转动主动轮的转数要求等。
一般是经过实际所需转数,考虑传动比因素返算所得。
三:极数反映岀电动机的同步转速,2极同步转速是3000r/min, 4极同步转速是1500r/min, 6极同步转速是1000r/min,8极同步转速是750r/min。
绕组的一来一去才能组成回路,也就是磁极对数,是成对岀现的,极就是磁极的意思,这些绕组当通过电流时会产生磁场,相应的就会有磁极。
三相交流电机每组线圈都会产生N、S磁极,每个电机每相含有的磁极个数就是极数。
由于磁极是成对出现的,所以电机有2、4、6、8......极之分。
就普通三相异步交流电动机来说,它的磁极对数影响了它的转速,转速=(电源频率x60)♦磁极对数X (1-转差率)。
在理想的同步状态下,转速=电源频率"0三磁极对数。
实际情况下,电机转速不可能达到同步状态,也就是存在转差率。
比如二极电机,它的极对数是1,那么它的同步转速就是50x60^1=3000.然后由于转差率的不同,二极电机转速就有2960, 2940等转速,同样八极电机的转速<750,转差率不一样,实际转速稍有出入。
但是不可能 > 同步转速。
直流马达及其线圈绕线方法本发明是关于一种直流马达及其线圈绕线方法,该方法以一单一导线在成型柱杆依预定匝数依序卷绕,形成一具偶数个线圈组的定子线圈,该定子线圈具有一第一端及一第二端,定子线圈的相邻二线圈组的卷绕方向成反相,该具偶数个线圈组的定子线圈可以被安装在直流马达的壳体,与转子的永久磁铁相对应,籍山定子线圈通以电流产生的磁力推斥具永久磁铁的转子转动。
本发明克服了公知技术存在的缺陷,加工、制造方便,在卷绕时可以避免因碰触磁极片而刮伤造成线圈短路,且定子线圈在作接线工作或组设时亦会非常方便容易,且不会有误接问题。
仁一种直流马达的线困绕线方法,其特征在于:提供一单一导线,将该导线在成型柱杆上以预定匝数依序卷绕,以形成偶数个线圏组的定子线圏,且该定子线圏具有一第一端及一第二端,该定子线圏的相邻二线圏组的线圏卷绕5方向反相。
2. 如权利要求1所述的直流马达的线圏绕线方法,其特征在于:以一单一导线在卷绕偶数个线圏组的定子线圏时,其在成型柱杆上以相同的方向卷绕相同的匝数,卷绕完成后将该具偶数个线圏组的定子线圏取离成型柱杆,再将定子线圏第偶数组翻转180。
,使具偶数线圏组的定子线圏的第偶数组线圏与10 第奇数组线圏的线圏卷绕方向相反。
3. 如权利要求1所述的直流马达的线圏绕线方法,其特征在于:以一单一导线在卷绕偶数个线圈组的定子线圏时,其在成型柱杆上以相同的方向卷绕相同的匝数,卷绕完成后将该具偶数个线圏组的定子线圏取离成型柱杆,再将定子线圏第奇数组翻转180。
,使具偶数线圏组的定子线圏的第偶数组线圏与15 第奇数组线圏的线圏卷绕方向相反。
4. 一种直流马达,其特征在于:包括:壳体,设一容室及该容室底部具一支持部,该壳体具一控制件,且壳体具有一偶数线圏组的定子线圈,该电子线圏山一单一导线连续卷绕形成,且20该相邻的二线圏组的线圏卷绕方向反相;转子,设一转动轴在壳体的支持部旋转,该转子具队3磁极的永久磁铁,该转子可被壳体上定子线圏的各线圏组产生的磁场推斥转动。
5、如权利要求4所述的直流马达,其特征在于:所述壳体容室的壁设偶数个固定件,该各固定件可供各线圏组固定。
直流马达及其线圏绕线方法技术领域本发明是关于一种直流马达及其线圏绕线方法,该马达的定子线圏可以方便被缠绕,以构成一直流马达的定子。
背景技术请参阅图7所示,为一种公知的以径向绕线方法形成的直流马达定子90,该定子90的绕线方法,是以导线901在对定子90绕线前,将导线901—端形成第一接点VI,导线901先对半数极臂90&、906进行绕线,当绕线完成时必须作暫时停顿,以便拉出导线901形成接点70 (即共接点),再继续对剩下的半数的极臂90。
90(1进行绕线。
当所有极臂90A 90. 90o 90(1完成绕线时,15该导线901另一端形成第三接点乂2。
因此,定子90可利用该双组线圈马达驱动电路, 产生交变的旋转磁场,以驱动具I 5磁极的转子。
此种公知的径向绕线过程中,必须中途停顿不能一次卷绕完成。
请参阅图8所示,为第二种公知的直流马达定子的绕线方法,是以导线911在对定子91绕线前,将导线9门一端形成第一接点VI,而当导线911对定子20卷绕完所有定子极臂91&、916、91o91(1时,该导线9们另一端形成第二接点乂2。
因此,定子91可利用该单组线圏马达驱动电路,且在单组线圏上以正反向的电流导通,以产生交变的旋转磁场供驱动具I 5磁极的转子。
该第二种公知的径向绕线方法,以单一导线进行绕线,其必须依所需的线圏匝数在定子的各极臂91&、91. 910、91(1绕上相等于匝数的圏数。
因此,在绕线速度25有一定极限的情况下,实际上并无法减少定子的绕线时间。
图1本发明的线图卷制步骤一;5图2本发明的线圏卷制步骤二;图3本发明的线圏卷制步骤三;图4本发明使用在径向气隙无刷马达分解立体图;图5本发明使用在径向气隙无刷马达俯视剖面图;图6本发明使用在轴向气隙无刷马达分解立体图;10图7笫一种公知径向气隙无刷马达俯视剖面图;图8第二种公知径向气隙无刷马达俯剖面图;图9第三种公知径向气隙无刷马达俯视剖面图:图10公知轴向气隙无刷马达分解立体图。
附图标号说明15仁导线门、第一端12、弟二端10、定子线圏10&、线圏组10、线圏组10。
线圏组106、线圏组2、柱杆3、壳体31、容室32、支持部33、固走件34、比控制件35、走子觇36、电路板4、转子41、转动轴42、永久磁铁43、永久磁铁具体实施方式请参阅附图,将本发明举下列实施例说明。
请参阅图1、2所示,为本发明的定子线圏10卷绕制造方式。
本发明的走子线圏10由一单一导线1在预定形状的柱杆2 上依序以相同25的方向卷绕(依图面而言为顺时针方向〉,该走子线圏10的线圏组数依形成马达极数的需要而卷绕,且被卷绕为偶数个线圏组10&、10x 10o 101该各线圏组的匝数依需要形成相同的预走匝数,该具偶数个线圏组的走子线圏10由一单一导线连续卷绕形成.且具有一第一端11及一第二端120请参阅图3所示,当该一次连续卷绕且具偶数个线圏组10&、10以10。
10(啲定子线图10被卷制完成后,由该定子线圏10中的第奇数的线圏组103、5 100或第偶数的线圏组101 仙作180。
的翻转。
在优选实施例当中,将排列在第偶数的线圏组106、10(1 K依图面而言, 由左侧算起)翻转,因此,该第偶数的线圏组10、10(1其卷绕方向即形成与第奇数的线圏组10&x10〔为相反方向。
在本优选实施例当中,该第偶数的线圏组1015. 10(1的卷绕方向为逆时针方向,因此,藉由该线圏组106、10人的卷绕方向的改变,可以达到改变线10圏组1此、104的电流方向及其产生的磁场方向。
请参阅图4、5所示,为本发明使用在径向气隙马达的一优选实施例,由一壳体3设有一容室31 ,该容室31底部具一支持部32 ,该支持部32可以支持转子4的转动轴41旋转,转子4 本身具有永久磁铁环42 ,永久磁铁环42具有1 5磁极。
壳体3由形成容室31的内壁或外壁设数个固走件33,该固15走件33可以为沉孔或柱,使该由偶数个线圏组10&、10. 10. 1叱所构成的定子线圏10可以分别被固走在该各固走件33位置,由该各线圏组10&、10、10。
何与转子4的永久磁铁环42相对应设置,且由于该走子线圏10的相邻二线圏组103. 106或10、100的电流方向及磁场方向不同。
因此,该走子线圏10被通以电流后各线圏组10&、106、10J03可产生不同的交变磁场,20该磁场所形成的磁力可推斥转子4的永久磁铁环42转动, 且由壳体3所设霍尔感应元件及驱动电路构成的化控制件34可监测转子4的永久磁铁环42的I 3极变化,因此该1(3控制件34可发出讯号使走子线圏10的各线圏组10&、105、10o 10(1 交替改变电流方向,以使转子4可持续转动。
请参阅图6所示,为本发明使用桶由向气隙马达的实施例,该壳体3具一25容室31 ,可支持转子4的转动轴41旋转,转子4的顶盘设有永久磁铁43 ,该永久磁铁43具有I 3极;壳体3的容室31底部具有一走子辄35、电路板36 ,电路板36上设有公知的霍尔感应元件及驱动回路等化控制件34 ,且该走子觇35结合有本发明由一单一导线圏绕而成的二线圏组10&、10、该二线圏组10&. 106具有不同的卷绕方向,因此二线圏组10&、106的电流方向及磁场方向亦不相同,藉由该二线圏组10&. 106产生的磁力推斥转子4的永久磁铁43 5转动,因此,该转子4可以被驱动旋转。