遗传算法模糊控制
基于遗传算法的同步发电机模糊PID励磁控制器研究

2 同步发电机自动励磁控制系统I I
关键词 : 遗传算法 模糊控制 PD I 控制 励磁控制
Ab t a t s r c :De e o i g fo a c n e to a I v l p n r m o v n i n lP D
同步发电机 自动励磁控制系统有 以下部分组 成: 同步发电机、 励磁调节器、 电压测量 比较单元、 综合放大单元、 功率单元等 。 各部分传递函数为: 发 电机 : G = G (): o = K
( E, E 和 比例 因子( u 、 u、u ) K K C) K p K i d 的大 小 , K 最
c n r l Ex i to o t l o to l ct inc nr a o
其 中: 一发 电机放大系数; ‰
d 时 间常 数 。 0 一
电 压测量比较单元: R ) 而 R G( = K
其 中: 凰一 电压测量 比较单元放大倍数; 时 间 常数 。
一
l 引言
维普资讯
粥
理 论与 设计
数如 图2 图3 示 。 和 所
参 数 KPKIK 的变 化 量△ pA 、 K 。 、 、D K 、 Ki d它首 先进 A
行模糊化计算 , 然后按模糊控制规则进行逻辑推 理和判决, 得到输 出变量△ 、 K、 。 Ai 本文采用 遗传算法优化的可调因子的模糊PD励磁控制器 I 结构 图见 图1 是根 据E , 和EC来调 整量化 因子
了 良好 控 制 效 果 。 随 着 电 力 系 统 的 发 展 , 统 但 传 PD励 磁 控制 器 己不 能满 足 要求 。 I
功率单元 : z ) G( = 其 中: _功率单元放大倍数 ;
死一 时 间常数 。
基于遗传算法优化可调整控制规则的模糊控制
t ue e c ie y a n lt x r si n h sb e e in d mlr l sd s rb d b n a ayi e p e so a e n d sg e .Th n t e i r v d g n t l oi m mpo e o c ry o tgo a a t p c e h mp o e e ei a g rt i e ly d t ar u l b l s 。 — c h s f
变 时滞 后 系统 具 有 较 好 的 适 应 能 力 。
关键词
可调 整 因子
模 糊控制 遗传算法 寻优
oPT M I I I S NG FUZZY CoNTRoL I W TH ADJ TABLE US
CoNTRoL RUL ES BAS ED oN NETI GE C ALGoRI THM
鲁棒性强 、 算法 简单 易用 、 于实 时控 制… 。但 普 通模 糊控 制 便 器也有其缺点 : 首先 , 模糊控制规则是根据 专家 的经验 制定 的 , 很难 避免带有一定 的主观性 ; 其次 , 控制规则一旦制定就不能 够 根据外界条件变 化进 行调 整 J 。这些 缺点 严重 限制 了模 糊控 制器的应用 , 尤其是 对那 些具 有参 数时变 、 时滞后较 大系统 的控 制_ 。为 了弥补这些不足 , j J 自然就考虑 到模糊 控制器应 向着 自 适应 、 自组织 和 自学 习方 向发展 , 使模糊控制规则在控制过程 中
Ke w r s y od
A js l f tr F z o t l G n t gr h O t i du t e a os u z c nr e ei a oi m b a c y o cl t pi s m e
机电传动控制系统中的模糊控制算法优化研究

机电传动控制系统中的模糊控制算法优化研究随着现代科技的不断发展,机电传动控制系统在工业生产和自动化领域中的应用越来越广泛。
而在机电传动控制系统中,控制算法的优化是提高系统性能和稳定性的关键因素之一。
本文将围绕机电传动控制系统中的模糊控制算法进行优化研究,旨在提出可行的优化方法和算法,提高机电传动控制系统的性能。
一、模糊控制算法的基本原理模糊控制算法是一种应用于非线性系统的控制方法,在机电传动控制系统中具有广泛的应用。
其基本理念是通过模糊逻辑推理来实现对系统的控制。
模糊控制算法利用模糊集合理论的思想,将输入和输出之间的模糊关系进行建模和描述,然后根据模糊规则进行推理,得到控制指令。
二、模糊控制算法的优化需要尽管模糊控制算法在机电传动控制系统中表现出优秀的性能,但仍然存在一些问题需要解决。
首先,由于模糊控制算法的设计具有一定的主观性,人工经验往往在其中起到决定性作用,导致算法的稳定性和可靠性难以保证。
其次,传统的模糊控制算法往往存在计算复杂度高和运算速度慢的问题,不能适应实时控制的需求。
因此,优化模糊控制算法的研究势在必行。
三、基于遗传算法的模糊控制算法优化遗传算法是一种模拟自然界生物进化过程的优化算法,在解决复杂优化问题上具有优越性。
基于遗传算法的模糊控制算法优化正是将遗传算法与模糊控制相结合,通过优化模糊控制算法的参数和规则,提高系统的控制性能。
在基于遗传算法的模糊控制算法优化中,首先需要将模糊控制的参数和规则进行编码,然后通过遗传算法进行种群的初始化和进化操作。
在种群进化的过程中,通过交叉、变异等操作,不断地优化模糊控制算法的参数和规则。
最后,根据遗传算法进化得到的最优解,重新设计和优化模糊控制算法。
四、基于模糊神经网络的模糊控制算法优化模糊神经网络结合了模糊逻辑和神经网络的优点,可以更好地解决非线性系统的控制问题。
基于模糊神经网络的模糊控制算法优化是将模糊神经网络应用于模糊控制的算法优化过程中,通过神经网络的学习能力和自适应性,提高模糊控制系统的性能。
基于遗传算法优化的磨机负荷模糊控制
确的数学模型且鲁棒性强, 因此对于处理磨机运行过程很好的控制效果。但是模糊逻辑控制器的控制规则 、 隶属度 函数 和语 言变量 的模糊化 都需 由领 域专家 的经验 确定 , 有很 大 程 度 的主观性 和 随意 性 。为 了弥补 这 方面 的缺 陷 , 引入 遗传算 法来 优化模糊 控制 器 。
1 磨机 负荷特性
‘
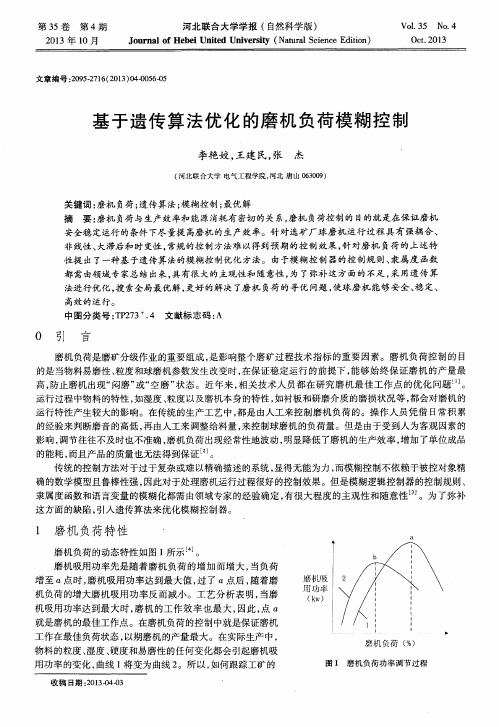
磨 机负荷 的动态 特性 如 图 1所示 。
磨机 吸用 功率先是 随着磨 机 负 荷 的增 加 而增 大 , 当负荷
增至 口点时 , 磨机吸用功率达到最大值, 过了 。点后 , 随着磨 机负 荷 的增 大磨 机 吸用 功率 反 而减 小 。工 艺 分析 表 明 , 当磨 机吸用功率达到最大时 , 磨机 的工作效率也最大, 因此, 点口 就是磨机的最佳工作点 。在磨机负荷的控制中就是保证磨机 工作 在最佳 负荷状 态 , 以期磨 机 的产 量最 大 。在 实 际生 产 中 ,
0 引 言
磨 机 负荷是磨 矿分 级作业 的重要 组成 , 是影 响整个 磨矿 过程 技术 指标 的重要 因素 。磨机 负 荷控 制 的 目
的是当物料易磨性 、 粒度和球磨机参数发生改变时, 在保证稳定运行的前提下 , 能够始终保证磨机的产量最 高, 防止磨机 出现 “ 闷磨 ” 或“ 空磨” 状 态 。近 年来 , 相 关 技术 人 员 都在 研 究 磨机 最 佳工 作 点 的优化 问题 ¨ 。
一
…
…
一
荷
…
图 2 基 于遗传算 法的磨 机负荷模糊控 制系统结构 图
一
一 一 值 _ _ . . . 际值 模 的偏 差 、 该 控 制系统 中 , 用 电流信号 来表 征实 际 的磨 机负 荷 , 模 糊 控 制器 根据 负荷设 定 与实 偏 差
基于遗传算法优化的汽车巡航模糊控制策略

摘要 : 研究汽车巡航控制系统中采用模糊控制 。模糊控制 中的隶属 函数和模糊推理规则 的选取专家 或者技术人 员 的经验 ,
但人工经验具有随机性和主观性 , 使得其 控制性能往往达不 到理想 的效果 。针对 上述 问题 , 采用一 种基 于遗传算 法的模糊 控制策略 , 利用遗传算法并对隶属 函数 和模糊推理规则进行优化 , 从而使 隶属 函数和模糊 推理规则 的确 定摆脱 了人 为经验 的局 限, 提高了模糊控制的 自适应 能力 。实验结果表 明优化后的控制器可以使汽车巡航 系统取得较满意 的效果 。 关键词 : 巡航控制系统 ; 遗传算法 ; 模糊控 制; 仿真
1 引言
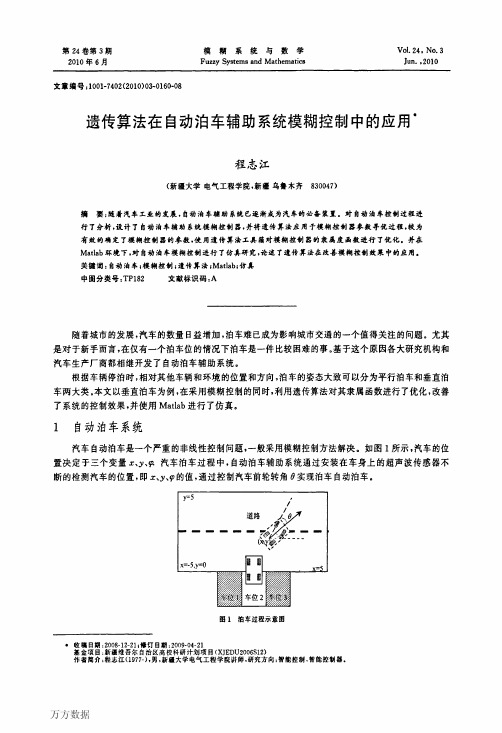
汽 车巡 航控 制 系 统 是 一 种 辅 助 驾 驶 系 统 。它 根 据 设 定
足之处在于隶属 函数 和模 糊规 则的获 取一 般凭专 家和 工作
人 员 的经 验 获 取 , 人 工 经 验 的 随 机 性 和 主 观 性 , 而 因此 很 难
的车速和实际车辆行驶 车速的差 , 运用相 关的控制算 法进行 计算 , 产生节气门 的控 制信 号 , 过改 变节气 门开 度来 跟踪 通 目标 车速并保持 稳定 车速 。这就 使得 驾驶人 员 的脚在 车辆 处 于巡航状态时得 以解放 , 减轻 了因长时 间控制油 门而产生 的疲劳 , 提高了驾驶舒适 性 _ 。此外 , l j 使用 C S可 使汽 车的 C
第2卷 第7 7 期
文章 编 号 :0 6—94 ( 0 0 0 0 8 0 10 3 8 2 1 )7— 2 5— 3
计
算
机
仿
真
21年7 00 月
基 于遗传 算 法优 化 的汽 车巡 航模 糊 控 制策 略
刘 洪玮 , 石红 瑞
飞行器航迹规划与路径规划技术研究
飞行器航迹规划与路径规划技术研究导言随着飞行器技术的不断发展和普及,飞行器航迹规划与路径规划技术也越来越受到关注。
飞行器航迹规划与路径规划是指在给定起飞点和目标点的情况下,确定一条飞行器航迹或路径,从而指导飞行器的飞行。
本文将就飞行器航迹规划与路径规划技术的研究现状、应用领域以及发展趋势等方面进行探讨。
一、航迹规划与路径规划技术的研究现状飞行器航迹规划与路径规划技术已有多年的发展历程,其中最主要的几个方向包括遗传算法、模糊控制和粒子群算法等。
这些技术各有优劣,但都能够满足不同领域的需求。
(一)遗传算法遗传算法是一种基于自然遗传变异和选择的寻优算法,其特点是具有全局搜索能力、高效率和适应性强。
针对飞行器航迹规划和路径规划问题,研究人员通过遗传算法来实现路径规划问题的优化,从而达到优化飞行器飞行时间和消耗燃料的目的。
(二)模糊控制模糊控制是一种能够有效解决复杂系统控制问题的方法,它允许使用模糊集合定义变量,这样可以使系统更加灵活,适应性更强。
研究人员通过模糊控制来实现飞行器航迹规划和路径规划问题的优化,从而达到优化飞行器的飞行性能的目的。
(三)粒子群算法粒子群算法是一种基于群体行为的寻优算法,其特点是具有全局搜索能力、搜索速度快等优点。
在飞行器航迹规划和路径规划问题中,研究人员通过粒子群算法来实现路径规划问题的优化,从而获得最优的飞行器航迹或路径。
二、应用领域飞行器航迹规划和路径规划技术的应用领域非常广泛,其中包括航空、地理、气象、海岸、水利等领域。
下面将分别介绍其主要应用领域。
(一)航空航空是飞行器航迹规划和路径规划技术最主要的应用领域之一。
在航空领域,飞行器航迹规划和路径规划技术被广泛应用于飞行器导航、空域管理、飞行计划等方面。
(二)地理在地理领域,飞行器航迹规划和路径规划技术主要应用于地图、地形、土地利用等方面。
例如,飞行器可用于制作高精度的地形模拟图,以及用于卫星图像处理。
气象领域是飞行器航迹规划和路径规划技术的重要应用领域之一。
采用共生遗传算法的模糊控制器设计方法
采用共生遗传算法的模糊控制器设计方法随着模糊控制器在控制领域的广泛应用,克服控制系统存在的非线性、不确定的复杂现象是十分重要的。
共生遗传算法是一种用于解决模糊控制器中各种复杂问题的方法。
本文介绍了基于共生遗传算法的模糊控制设计方法的设计过程。
首先,在模糊控制系统的结构设计中采用基于共生遗传算法的模糊控制器。
本文提出的共生遗传算法采用编码逻辑、模糊规则库、适应度函数、局部搜索等几个重要步骤,根据模糊规则和适应度函数,解决模糊控制器设计问题。
此外,本文的方法可以被应用在复杂的非线性系统控制中,包括线性和非线性控制系统。
最后,实验结果表明,本文提出的方法有效地提高模糊控制器的性能,在实际应用中取得良好的效果。
随着控制技术的发展,模糊控制(Fuzzy Control)已经被广泛地应用于控制理论和工程实际中,有效地提供了一种把复杂的、非线性的控制系统一起控制的新方法。
但是,由于模糊系统具有复杂的结构,其设计过程复杂,受到很多因素的影响,因此很难通过模糊规则设计系统,且系统的最优性能很难确定。
在传统控制器设计领域,传统算法如梯度下降法、基于模式算法等已经被广泛应用,但这些算法大多依赖于传统的数学模型,而在复杂的非线性系统控制中,它们的表现不是最佳的,这种复杂的控制环境中,共生遗传算法(COGA)应运而生,作为搜索优化方法,COGA具有优势,它以自适应的方式去发现优秀的控制参数,而收敛到的结果通常更优,近几十年来,COGA作为一种求解模糊控制器设计问题的综合方法,在许多控制工程领域得到了广泛的应用,它具有灵活性、可拓展性、可靠性等优点,很好地解决模糊控制器设计问题。
在共生遗传算法的模糊控制器设计过程中,最重要的是对当前控制系统的编码,这是对整个控制系统基本结构进行全面分析和识别的重要环节。
在编码设计中,需要根据模糊控制系统的方程进行编码,并结合系统参数和调节参数,进行模糊控制器设计和参数设计。
编码完成之后,下一步就是控制规则库的设计,每个控制规则都是由”if-then”格式构成的,如”if-X is A,then Y is B”。
基于遗传算法的自适应模糊调节器的设计
K y r s:G n t c A g r t m F z y C n r l Q a t f c t o a t r R n o o b e i e r S s e e wo d ee i l o ih ; u z o to ; u n i ia i n F co ; a d m D u l ln a y tm
a pt e uz re l or as d n en ic da iv F zy gu at b e o g et al ori h g t m i si ne s de g d, an wi h he ul a aly s f he m ct f d t t f l n si o t i pa o q nt a Ve ac r ua it ti f to on h s ea —s at an dy mi pr pe i o t e t dy t e d na c o rt es f t sy te he s m, t ar cl pr os a he ti e op es fuz y z
一
种智能调节量化因子的模糊控制算法 , 系统具有好 的动态和稳态性能。 使 文章利用此控制器对双 线性模 型进行 了仿真 , 结
果证 明了其有效性。 关键词 : 遗传算法: 糊控 制: 模 量化因子: 随机双 线性系统
中图分类号 :P7 +2 T 23 . 文献标识码 : A 文章编号 : 6 1 4 9一 2 0)— 0 4 O 1 7 — 72 (0 88 0 4 一 2
遗传算法在自动泊车辅助系统模糊控制中的应用
≥:只×以(只)
6
∑段(研)
I-一6
;4.49,将其反变换后
-4.3—2一l O
儿(),j
Z
........£ 父::::::
/<
/I
I\。
一2一l 0 l
2 3 4 56
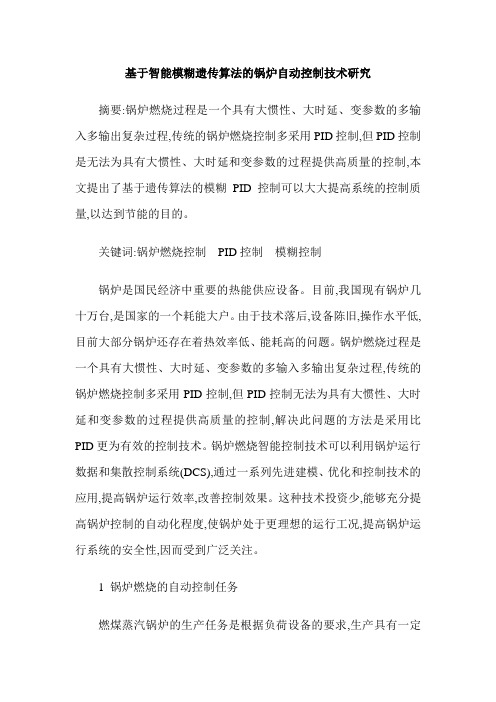
图z模糊推理过程
3 隶属度函数遗传算法优化
模糊控制可借鉴操作人员或专家的经验来帮助选择控制器的结构和参数。然而,由于一个模糊控制 器所要确定的参数很多,专家的经验只能起到一个指导作用,很难根据它准确的定出各项参数,因而在 实际上还要不断的反复凑试。这实质上是一个寻优过程。遗传算法可以应用于该寻优过程,较为有效的 确定模糊控制器的结构和参数。[13 3.1遗传算法基本结构
IF妒lS PS AND z IS NS AND y IS ZE,THEN口IS PB IF驴lS ZE AND z IS NB AND y IS ZE,THEN口IS PS IF妒IS ZE AND z IS NS AND y lS ZE,THEN口IS PM
根据多前提多规则模糊推理的过程,输出为:[3】 矿=(z7×矿×y)·(尺l U R2 U R3 U R。)
始种群crtbp、轮盘选择rws、离散变异mut、单点交叉xovsp等函数,可以方便的实现遗传算法。 目标函数歹可以看作是一个积分函数的平方和,程序的主要变量有:个体的数量NIND一50,最大
遗传算法在模糊控制中的应用案例

遗传算法在模糊控制中的应用案例近年来,随着人工智能技术的飞速发展,遗传算法作为一种优化算法,被广泛应用于各个领域,其中包括模糊控制。
模糊控制是一种基于模糊逻辑的控制方法,通过将模糊集合和模糊规则应用于控制系统中,实现对复杂系统的控制。
本文将介绍遗传算法在模糊控制中的应用案例,并探讨其优势和局限性。
一、遗传算法简介遗传算法是一种模拟生物进化过程的优化算法,其基本思想是通过模拟自然选择、交叉和变异等过程,不断优化解决问题的方案。
遗传算法的核心是个体编码、适应度评价、选择、交叉和变异等操作。
通过这些操作,遗传算法能够在大规模的解空间中搜索到最优的解。
二、1. 温度控制系统温度控制系统是一个常见的控制问题。
传统的控制方法往往需要事先建立准确的数学模型,但在实际应用中,系统模型往往是复杂且不确定的。
遗传算法可以通过优化模糊控制器的参数,使其能够适应不确定的系统模型。
通过对温度控制系统进行仿真实验,结果表明,遗传算法能够有效地优化模糊控制器的性能,提高控制系统的稳定性和鲁棒性。
2. 机器人路径规划机器人路径规划是一个典型的优化问题。
在复杂环境中,机器人需要找到一条最短路径来完成任务。
传统的路径规划方法往往需要建立精确的地图模型,但在实际应用中,地图模型往往是不完全的或者存在噪声。
遗传算法可以通过优化模糊规则和隶属函数,使得机器人能够在不完全的地图模型中找到最优路径。
通过对机器人路径规划问题进行仿真实验,结果表明,遗传算法能够有效地优化模糊规则和隶属函数,提高机器人路径规划的准确性和鲁棒性。
三、遗传算法在模糊控制中的优势和局限性1. 优势遗传算法具有全局搜索能力,能够在大规模的解空间中搜索到最优解。
在模糊控制中,遗传算法能够优化模糊规则和隶属函数,提高控制系统的性能。
此外,遗传算法还能够适应不确定的系统模型和环境变化,具有较强的鲁棒性。
2. 局限性遗传算法的计算复杂度较高,需要大量的计算资源和时间。
此外,遗传算法的结果往往是近似解,无法保证找到全局最优解。
基于智能模糊遗传算法的锅炉自动控制技术研究
基于智能模糊遗传算法的锅炉自动控制技术研究摘要:锅炉燃烧过程是一个具有大惯性、大时延、变参数的多输入多输出复杂过程,传统的锅炉燃烧控制多采用PID控制,但PID控制是无法为具有大惯性、大时延和变参数的过程提供高质量的控制,本文提出了基于遗传算法的模糊PID控制可以大大提高系统的控制质量,以达到节能的目的。
关键词:锅炉燃烧控制PID控制模糊控制锅炉是国民经济中重要的热能供应设备。
目前,我国现有锅炉几十万台,是国家的一个耗能大户。
由于技术落后,设备陈旧,操作水平低,目前大部分锅炉还存在着热效率低、能耗高的问题。
锅炉燃烧过程是一个具有大惯性、大时延、变参数的多输入多输出复杂过程,传统的锅炉燃烧控制多采用PID控制,但PID控制无法为具有大惯性、大时延和变参数的过程提供高质量的控制,解决此问题的方法是采用比PID更为有效的控制技术。
锅炉燃烧智能控制技术可以利用锅炉运行数据和集散控制系统(DCS),通过一系列先进建模、优化和控制技术的应用,提高锅炉运行效率,改善控制效果。
这种技术投资少,能够充分提高锅炉控制的自动化程度,使锅炉处于更理想的运行工况,提高锅炉运行系统的安全性,因而受到广泛关注。
1 锅炉燃烧的自动控制任务燃煤蒸汽锅炉的生产任务是根据负荷设备的要求,生产具有一定参数的蒸汽,为了满足负荷设备的要求,保证锅炉本身运行的安全性和经济性,工业锅炉控制主要有下列自动调节任务:(1)保持汽包水位范围。
汽包水位是锅炉正常运行的主要指标,关系着汽水分离的速度和生产蒸汽的质量,也是确保安全生产的重要参数。
水位过高会影响汽水分离,产生蒸汽带液现象;水位过低会影响汽水循环,严重时会使个别上水管内的流动停滞,致使金属管壁局部过热而爆管,导致重大事故。
因此,必须对汽包水位进行自动调节,使水位严格控制在规定范围内。
(2)维持蒸汽压力在预定值。
蒸汽压力是衡量锅炉的蒸汽生产量与负荷设备的蒸汽消耗量是否平衡的重要指标,是蒸汽锅炉的重要工艺参数。
控制系统中的模糊控制与遗传算法优化比较
控制系统中的模糊控制与遗传算法优化比较在控制系统中,模糊控制和遗传算法优化是两种常用的控制方法。
它们分别基于模糊逻辑和遗传算法的原理和算法进行系统的建模和优化,用于处理复杂的、模糊的和非线性的控制问题。
本文将就这两种方法展开比较,并探讨它们在不同应用场景下的优势和不足。
一、模糊控制模糊控制是一种基于模糊逻辑的控制方法,能够处理对系统的控制要求不明确或者具有模糊性的问题。
在模糊控制中,通过建立模糊规则库,将模糊输入和输出之间的关系进行数学化表示。
模糊控制系统通过对输入和输出进行模糊化和去模糊化的过程,从而实现对系统的控制。
模糊控制的优点是能够处理非线性和模糊的系统模型,并且具有较强的鲁棒性。
它能够适应系统的复杂性和不确定性,并在这种情况下仍能保持较好的控制效果。
此外,模糊控制方法的设计和调试相对较为简便,不需要准确的系统模型,只需要通过经验和专家知识进行系统参数的调整和优化。
然而,模糊控制也存在一些不足之处。
首先,模糊控制需要依赖人工建立的模糊规则库,这需要一定的专业知识和经验,并且规则库的建立过程较为繁琐。
其次,模糊控制在处理高维系统和大规模系统时存在困难,由于规则库的复杂度和计算复杂度的增加,可能导致计算量过大和实时性下降。
最后,模糊控制的性能高度依赖规则库和模糊化方法的选择,对于不同的问题,需要进行不同的定制和参数调整。
二、遗传算法优化遗传算法是一种模拟生物进化过程的优化算法,通过模拟遗传、突变、选择等过程,使用一组个体的编码表示问题解,并通过优胜劣汰的原则寻找最优解。
在应用于控制系统中,遗传算法主要用于参数优化和系统优化。
遗传算法优化的优势在于能够全局搜索和适应系统非线性和复杂性,具有较好的寻优能力和鲁棒性。
通过引入随机性和多样性的原则,遗传算法能够在问题的解空间中进行有效的搜索和探索,从而找到问题的最优解或更优解。
此外,遗传算法的并行计算能力强,适用于高维和大规模问题的求解。
然而,遗传算法优化也存在一些局限性。
比较专家系统、模糊方法、遗传算法、神经网络、蚁群算法的特点及其适合解决的实际问题

比较专家系统、模糊方法、遗传算法、神经网络、蚁群算法的特点及其适合解决的实际问题一、专家系统(Expert System)1,什么是专家系统?在日常生活中大家所认知的“专家”一般都拥有某一特定领域的大量专业知识,以及丰富的实际经验。
在解决问题时,专家们通常拥有一套独特的思维方式,能较圆满地解决一类困难问题,或向用户提出一些建设性的建议等。
专家系统一般定义为一个具有智能特点的计算机程序。
它的智能化主要表现为能够在特定的领域内模仿人类专家思维来求解复杂问题。
因此,专家系统必须包含领域专家的大量知识,拥有类似人类专家思维的推理能力,并能用这些知识来解决实际问题。
专家系统的基本结构如图1所示,其中箭头方向为数据流动的方向。
图1 专家系统的基本组成专家系统通常由知识库和推理机两个主要组成要素。
知识库存放着作为专家经验的判断性知识,例如表达建议、 推断、 命令、 策略的产生式规则等, 用于某种结论的推理、 问题的求解,以及对于推理、 求解知识的各种控制知识。
知识库中还包括另一类叙述性知识, 也称作数据,用于说明问题的状态,有关的事实和概念,当前的条件以及常识等。
专家系统的问题求解过程是通过知识库中的知识来模拟专家的思维方式的,因此,知识库是专家系统质量是否优越的关键所在,即知识库中知识的质量和数量决定着专家系统的质量水平。
一般来说,专家系统中的知识库与专家系统程序是相互独立的,用户可以通过改变、完善知识库中的知识内容来提高专家系统的性能。
推理机实际上是一个运用知识库中提供的两类知识,基于木某种通用的问题求解模型,进行自动推理、 求解问题的计算机软件系统。
它包括一个解释程序, 用于决定如何使用判断性知识推导新的知识, 还包括一个调度程序, 用于决定判断性知识的使用次序。
推理机的具体构造取决于问题领域的特点,及专家系统中知识表示和组织的方法。
推理机针对当前问题的条件或已知信息,反复匹配知识库中的规则,获得新的结论,以得到问题求解结果。
智能控制、遗传算法、神经网络控制简介
遗传算法的二进制编码:1、 优点,提供的参数信息量大,优化效果好,二进制编码能够取得最大的模式数。
假设二进制编码长度为l ,则采用k 进制编码长度为m ,有mlk 2=,如l=6时,若采用四进制编码k=4,长度m=3。
相应的二进制编码模式数为72936=,而四进制编码模式数为12553=2、 求最优解或近似最优解的方法主要有三种: 枚举法、解析法和随机搜索法。
随着问题的复杂,往往会陷入局部最优,遗传算法开创了一种新的全局优化搜索算法。
遗传算法是模拟生物在自然环境下的遗传和进化过程而形成的一种自适应全局优化概率搜索方法。
3、 遗传算法的特点:a 、只对参数的编码进行操作,而非对参数本身。
B 、从许多点开始并行操作,而非局限于一点,防止局部最优;c 、通过目标函数来计算适配置,对问题依赖性小;d 、寻优规则由概率决定,不确定性;e 、在解空间上进行高效启发式搜索,而非盲目的穷举或完全随机搜索f 、对待寻优的函数基本 无限制,应用范围较广;g 、并行计算,速度快;h 、适合大规模复杂问题的优化;i 、计算简单且功能强。
4、 模式指编码的字符串在某些确定位置上具有相似性的位串子集的相似性模板,使用H 代表模式。
模式位数指模式有定义的非“*”位个数记为O(H),若H=00*1*0,则O(H)=4; 模式的定义长度指模式中最两端的有定义位置之间的距离,记为δ(H),若H=00*1*0,则δ(H)=6-1=5,若H=**11**,则δ(H)=4-3=1,模式长度越短,被破坏的可能性越小,长度为0的模式最难被破坏。
我们只关心字符的某些特定形式,如1****,11***,0**** 这种特定的组合形式就叫模式。
匹配:模式 *0000 则匹配2个个体:10000,00000当位串长度为l 时,一个包含n 个位串的种群中含有的模式个数为ll2*n 2→之间。
模式定理:适应度高于群体平均适应度的,长度较短,低阶的模式在遗传算法的迭代过程中按指数规律增长。
基于遗传算法的模糊自适应感应电动机控制
20 年 第 1 卷 07 7
第 2 期 1
收稿 日期 :07 0 — 7 20 — 3 1
基于遗传算法 的模糊 自适应感应 电动机控制
郝小星 , 郭瑞 鹃
(. 1 太原理工大学轻纺工程与美术学院 , 山西晋 中 ,3 6 0 2吉林农业大学 , 0 0 0 ;. 吉林 长春 ,3 18 10 1 )
性、 并行性 、 快速性 的优化方法 。它的基本思想是基于达尔文的进化论 和
生物的遗传机制 。 遗传算法最 大的特点是它不是对寻优参数本身进行搜 索, 而是对一群参数 编码 即“ 染色体 ” 进行寻优 。本文采用一种 自适应模
糊 算法运用于感应电机控制中的驱动 系统 , 取得 了比较好的仿真效果。
1 提 高感 应 电机 效 率的 基本原 理
由于感应 电机的设 计工艺 ,一般在 7 %额定负 载左右达 到最 大效 5
(一 ) 个参数表示。 1/ 2 另外为了缩小编码长度 用十进制对规则进行编码。
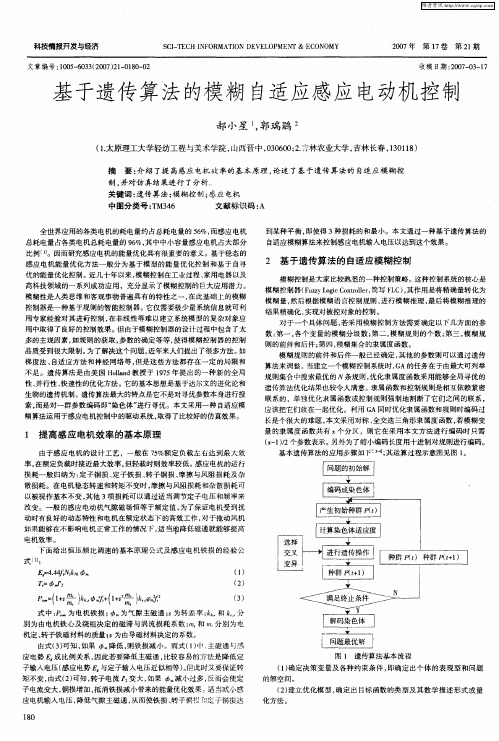
基本遗传算法的应用步骤如下 [ ; 川 其运算过程示意 图见 图 1 。
率, 在额定负载时接近最 大效率 , 但轻载时则效率较低。 感应电机的运行 损耗一般 归纳 为 : 定子铜损 、 定子铁损 、 转子铜损 、 摩擦 与风阻损耗及 杂 散损耗。在电机稳态转速和转矩不变时 , 摩擦 与风阻损耗和杂散损 耗可 以被视作基本不变 , 其他 3 项损耗 可以通 过适 当调节定 子电压和频 率来 改变。一般的感应电动机气隙磁场恒等于额定 值 , 为了保证 电机受 到扰
摘 要: 介绍 了提 高感应 电机 妓率的基本原理 , 述 了基于遗传算 法的 自适应模 糊控 论
制。 并对 仿 真 结 果 进 行 了分析 、
பைடு நூலகம்
基于遗传算法模糊控制的光伏发电系统最大功率点跟踪技术的研究

( 1 . Y a n g z h o uP o l y t e c h n i c C o l l e g e ,Y a n g z h 0 u 2 2 5 0 0 9 ,C h i n a ;2 . J i a n g s u U n i v e r s i t y ,Z h e n j i a n g 2 1 2 0 0 0 ,C h i n a )
Ab s t r a c t :Ba s e d o n t h e n o n l i n e a r o f t h e p h o t o v o l t a i c d e v i c e o u t p u t p o w e r a n d t h e f r e qu e n t c h a n g e s t h e w o r k e n v i r o n me n t .a f u z z y
d i fe r e n c e i n t h e d i f e r e n t i n t e r v a l o f t h e ma x i mu m p o i n t wa s s o l v e d . I t e n s u r e d t h a t t h e s y s t e m h a s a h i g h e r a c c u r a c y. By c o mp a r i n g t h e
A Re s e a r c h o n t h e Fu z z y Co n t r o l wi t h Ge n e t i c Al g o r i t h m f o r Ma x i mu m P o we r Po i n t Tr a c k i n g o f Ph o t o v o l t a i c Po we r S y s t e m
遗传算法的简介、操作步骤、模式理论、算法实现、改进、在模糊控制中的应用、求极大值、PID整定

1.2 遗传算法的基本思想
1.3 遗传算法的搜索机制
遗传算法模拟自然选择和自然遗传过程中发生的繁殖、交叉和基 因突变现象,在每次迭代中都保留一组候选解,并按某种指标从 种群中选取较优的个体,利用遗传算子(复制、交叉和变异)对这 些个体进行组合,产生新一代的候选解群,重复此过程,直到满 足某种收敛指标为止。
期望的选择次 数fi/¯fi
实际的选 择次数
1
01101
13
0.14
0.58
1
2
11000
24
576
0.49
1.92
0.22
2
0
3
01000
8
64 361
0.06
4
10011
19
0.31
1.23
1
总计
1170
1
4
4
平均
293
0.25
1
1
最大值
576
0.49
1.97
2
2.4
交叉
复制:将更好的方案推广
2.6 结论
随机产生的四个初始串为:01101,11000,01000,10011。 对应的x的值为13,24,8,19 平均适配值:293 最大适配值:576 经过一次复制、交叉和变异操作之后,种群中最优个体的适
配值和平均适配值均有所提高。可见每经过一次这样的遗传 经复制后产生的新的种群为:01101,11000,11000,10011 算法步骤,问题的解便朝着最优解方向前进了一步,只要这 对应的x的值为13,24,24,19 个过程一直进行下去,它最终会走向全局最优解,而每一步 平均适配值:421 的操作是非常简单的,而且对问题的依赖性很小。 最大适配值:576
遗传算法在模糊控制规则优化中的实现
遗传算法在模糊控制规则优化中的实现遗传算法(Genetic Algorithm,简称GA)是一种基于生物进化理论的启发式优化算法。
它模拟自然选择和遗传机制,通过对候选解进行适应度评价、选择、交叉和变异等操作,逐步优化搜索空间中的解。
在模糊控制规则优化中,遗传算法可以用于搜索最优的规则集合,以提高模糊控制系统的性能。
下面将介绍遗传算法在模糊控制规则优化中的具体实现步骤。
1.定义模糊控制器的基本结构和参数。
首先需要确定模糊控制器的输入变量、输出变量、模糊集的划分方法和模糊规则的格式等。
同时还需要确定遗传算法的相关参数,如种群大小、交叉率、变异率等。
2.初始化种群。
根据模糊控制器的规则格式,随机生成一定数量的规则集合。
每个规则集合即为种群中的一个个体,规则集合中每个规则的形式为IF-THEN规则,包括模糊集在输入变量上的隶属度函数和模糊集对输出变量的贡献程度(权重)。
3.适应度评价。
通过将种群中的每个个体应用于模糊控制系统,根据系统的性能指标对每个个体进行评价。
例如,可以使用误差的均方根(Root Mean Square Error,RMSE)作为评价指标,以衡量模糊控制器的控制效果。
4.选择操作。
根据适应度评价结果,根据一定的选择策略选择一定数量的个体作为下一代的父代。
选择策略常用的有轮盘赌选择、竞争选择等。
5.交叉操作。
从父代中选择两个个体,根据交叉率决定是否进行交叉操作。
交叉操作可以采用单点交叉、多点交叉等方式,将两个个体的部分基因片段进行交换,生成两个子代。
6.变异操作。
对于进行了交叉操作的个体,根据变异率决定是否进行变异操作。
变异操作可以随机改变个体中某些基因的值,以增加搜索空间的多样性。
7.更新种群。
将选择、交叉和变异等操作得到的子代个体合并到种群中,形成新一代的种群。
8.终止条件判断。
设置适当的终止条件,如达到指定的迭代次数、满足一定收敛要求等,判断是否终止优化过程。
9.反复迭代。
重复进行2-8步骤,直到满足终止条件。
非线性系统智能控制算法的研究与应用
非线性系统智能控制算法的研究与应用随着科技的快速发展,非线性系统在现代工程技术中的应用越来越广泛。
非线性系统问题的解决需要相对复杂的数学和物理模型,加上非线性系统难以发现特征值,对传统控制方法的稳定性等方面的要求也更高。
智能控制算法的出现给非线性系统的问题提供了有效的解决方案,大大提高了非线性系统控制的精度和效率。
非线性系统智能控制算法主要包括模糊控制、神经网络控制、遗传算法控制等,这些算法的出现一定程度上弥补了传统线性控制系统在非线性控制领域的不足,也取得了很高的应用价值。
一、模糊控制模糊控制是通过提供符合人类的思维模式来实现自适应控制的一种方法,它可以在非线性系统控制中应用。
该控制方法的优势在于对于复杂问题建模能力强,适合应用于非线性的控制问题中。
在智能控制中,模糊控制器主要由何种控制规则构成,以及如何对它们进行分析来确定输出控制的变量值。
模糊控制器通常将小数、整数和语言描述转化为逻辑形式,这种方法可以避免特定条件的误导性对大多数系统的控制造成的影响,提高了非线性系统控制精度和效率。
二、神经网络控制神经网络控制是一种由多个神经元组成的复杂系统,结构类似于人类大脑的神经网络。
神经网络控制器可以对系统的非线性动态行为进行预测,通过学习和训练使控制策略不断优化,从而提高控制精度和效率。
与模糊控制相比,神经网络控制在设计时不需要任何的数学模型,更加适合复杂系统和噪声较大情况下的控制。
三、遗传算法控制遗传算法控制是一种基于遗传学原理的智能控制方法,该算法通过将控制参数进行编码,利用自然选择和遗传变异的机制进行控制策略的优化,达到提高非线性系统控制效率的目的。
对于非线性系统,遗传算法控制可以通过一定的迭代计算使得得到的控制策略得到优化,达到自适应控制达到优化效果。
综上所述,智能控制在非线性系统控制中发挥着重要作用。
模糊控制、神经网络控制和遗传算法控制在非线性系统控制应用中起着重要的促进作用,进一步推动了非线性系统控制技术的发展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
智能控制实验报告
基于遗传算法优化的舵机伺服系统模糊控制
W zf (S)- K
Q S v
2333 T QSV S+ 1 0.00245S+ 1
-、液压舵机伺服系统模型的建立
某型飞机液压舵机伺服系统可以简单的视为由两级伺服放大器、小舵 机(包括小舵机作动筒、电液伺服阀)、小舵机反馈传感器、小舵机 反馈传感器解调器、液压作动筒、液压作动筒反馈传感器、液压作动 筒反馈传感器解调器组成的两级闭环控制系统。
图屮:外回路伺服放大器增益K° =7.5V/V,内回路伺服放 大器增益K =8mA/V,综合摇臂传动比K =0.65min/mm,平板 丄 1^
阀开度梯度= 2deg/nun ,平板阀流量增益K Q = 8.4 X 104nmi 3/deg/s,校正传感器对内回路的影响系数K 。
】=1.435, 内回路反馈传感器输出梯度Rs 】 =1.31V/nun,舵机作动筒反馈传 感器输出梯度兀2 =0.182±0.025V/mm,内回路反馈传感器解 调器放人系数K“ =0.5V/V,舵机作动筒反馈传感器解调器放 大系数 I ;。
? =0.52V/V O
电液伺服阀传递函数:
舵机作动筒的传递函数:
平尾液压作动筒的传递函数:
二、基于遗传算法的模糊控制器优化设计
1.常规模糊控制器的设计
理论而言,模糊控制器维数越高,系统的控制精度越高。
但是维数选 择过高,模糊控制律就过于复杂,基于模糊合成推理的控制算法的计 算机实现相当困难。
本文采用二维模糊控制器,考虑到要严格地反映 受控过程中输出量的动态特性并消除静态误差,选取受控变量值和输 入给定值的偏差e 和偏差变化率ec 作为输入量,选取舵机伺服阀系统 的电流u 为输出量。
模糊控制的结构方框图如图所示。
将系统误差e 和误差变化率ec 及输岀量u 的变化范围定义
为模糊集上的论域 E, EC ={・3,・2,0,1,2,3}, U={-6, -5, -4, -3, -2,・ 101,2,3,4,5,6}。
模糊了集均为{NB,NM,NS,ZO,PS,PM,PB}。
依据工程技术人员技术知识和实际操作经验,列出输出变量的模糊 控制规则。
W
zT (S) = 1
97.34S
W Z1(S) =
1 3570 S
2.遗传算法优化模糊控制器
模糊集合隶属度函数的形状对控制效果影响不大,而其对模糊论域的覆盖范圉对性能的影响相对较人。
合理划分模糊论域可以提高算法优化效率。
由于隶属度函数形状具有对称性,只需对一侧进行编码。
在图示模糊划分条件下,隶属度函数由0、xl、x2、x3唯一确定。
选取xl、x2、x3作为系统误差E的隶属度函数优化参数,进行8位二进制编码。
同理EC、U的隶属度函数的参数分别为x4.x5.x6 , x7.
x8、x9 o采用“串联二进制编码”法,将9个待优化参数连接在一起,表示一个个体的基因型。
其中一个参数xi的编码为a8a7a6a5a4a3a2al。
对应的解码公式为:
式中,[Hmin, H m a x ]为待优化参数的实际范围。
E , E C的隶属度函数参数的实际范围为[0, 3 ] o U的隶属度函数参数的实际范围为[0, 6]o
根据液压舵机伺服系统的特点,以下式作为参数优化选取的目标函数。
T
尸
J = |Qu r e2(r) +a K ec2(.t) + a u tr Ct)]dt(5>
V
式中,T近似取为实际系统调节时间t的10倍,花、dec、a u
s
为各项的加权系数,分别决定e(t)、ec(t)、u(t )在目
标函数中所占的比重。
由目标函数J (x)到个体适应度函数F(x)的转换规则
式中Q为灵敏度控制参数.本文中取a = Q 75。
遗传操作遗传算法的基本操作为选择、交叉、变异选择算法采用适应度比例法交叉操作选择单点交叉,交叉概率取为0.8
采用自适应变异概率,即变异概率与适应度有关,适应度越小,变异概率越大。
算法实现
确定遗传算法的运行参数:群体大小M = 3 0 0,终止进化代数G = 10 0,交叉概率P c = 0・8 ,变异概率Pm如式(7 )表示。
P m = 0.01 — [l:l:size]X0 .0 1/size ( 7 )
式屮,s i z e为样本个数,即决策变量离散化个数。
利用遗传算法工具箱函数对隶属函数进行寻优,仿真
程序经过1 0 0步迭代,最佳样本为:
B e t S = [0.2, 0.6, 3, 0.3, 1.2, 1.5, 2.4, 3.6, 4.4]
三、仿真过程描述
在设计的液压舵机模糊控制模型中,取误差的量化因了及误差变化的量化因子分别为2.5和0.4,取输出控制量的比例因子为0.85o设置仿真求解器为。
de 4 5,仿真时间为0・5 8 ,最大仿真步长设置为0・0 1 S,其他参数取系统默认值。
Clock
• simout
To Wo tkspace
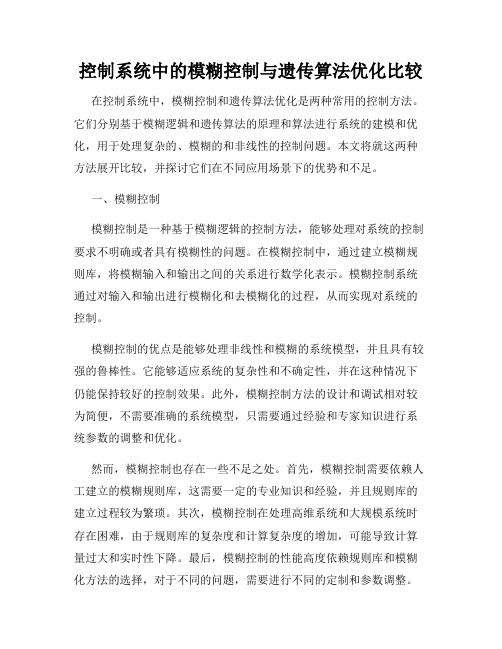
设置模糊控制器
FIS Variables
input variable "ec*1
Current Variable
Nane
Type
Range
Display Range
ec
input
Seeded variable ''ec1'
Current Membership Function (click on MF to select)
Name
Type
Params
Help Close 四、仿真结果分析
仿真不出文献所给结果。
但是基本学会如何使用模糊工具箱和遗传算法工具箱。
对siimiliiik有了进一步的学习。