无人机动平台组合导航系统
无人机导航系统综述

无人机导航系统综述摘要:本文首先简要介绍几种适用于无人机的导航系统及其实现原理,然后根据各种导航系统的优缺点,阐述近年来已成功应用或正在广泛研究的组合导航方法,最后对无人机导航技术的发展趋势进行分析与预测。
关键词:无人机;导航系统;组合导航;综述Abstract: Firstly this paper briefly describes some of the navigation systems applicable for UA Vs and their principles of realization. Then some approaches of integrated navigation that has been applied or under research these years are listed based on the advantages and disadvantages of different navigation systems. In the end we analyze and anticipate the development trend of the navigation technology for UA Vs.Key words: UA V, navigation system, integrated navigation, survey中图分类号: V279+.2 文献标识码: A文章编号:引言无人机导航是指无人机在飞行过程中确定其位置和方向的方法或过程,涉及数学、力学、光学、电子学、自动控制及计算机等多个学科[1]。
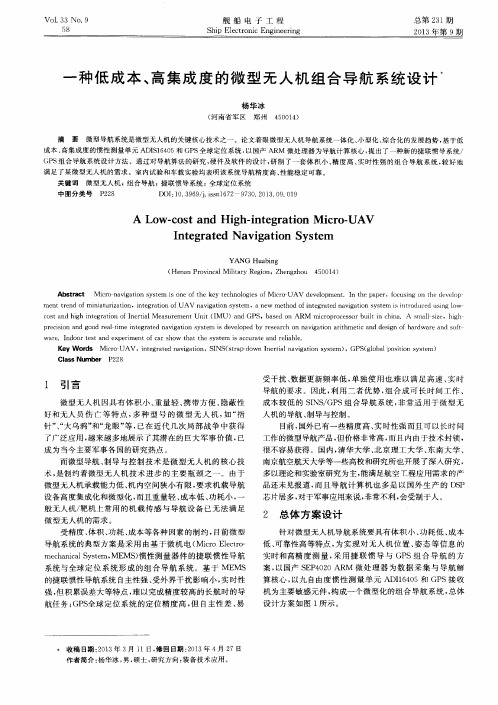
导航系统的性能直接关系到航行任务的完成[2],因为无人机只能依靠飞行控制系统来实现自动飞行,而飞行控制系统的反馈输入来自于导航信号,即机载计算机对于当前位置和(或)速度的估计,如图1所示。
图1 无人机航迹跟踪工作方式示意图虽然时至今日已有多种类型的无人机导航技术被研发和使用,但是在应用中需要根据实际需要选择最适合的导航技术。
KY-INS112 组合导航系统 使用说明书
KY-INS112组合导航系统使用说明书北京北斗星通导航技术股份有限公司导航产品事业部目录1.概述 (1)2.功能及指标 (1)2.1主要功能 (1)2.2性能指标 (1)3.工作原理 (3)3.1.产品组成 (3)3.2.基本原理 (3)4.使用说明 (4)4.1外形尺寸 (4)4.2电气接口 (5)5.系统导航工作流程 (8)5.1.组合导航流程 (8)5.2.纯惯性导航流程 (8)6.产品配置 (9)6.1.设备接口功能 (9)6.2.配置查询 (10)6.3.波特率配置 (10)6.4.协议及更新率配置 (10)6.5.初始值配置 (12)6.6.功能模块配置 (12)6.7.“零速修正”配置 (12)6.8.“位置输出平滑”配置 (13)6.9.载体类型配置 (13)6.10.GNSS天线杆臂配置 (14)6.11.输出杆臂设置 (15)6.12.安装角设置 (15)6.13.输出角设置 (16)6.14.强制转惯性导航 (16)6.15.系统复位 (17)7.输出语句解析格式 (17)7.1.可输出的协议类型 (17)8.存储数据导出 (22)9.系统维护 (24)9.1.固件升级 (24)9.2.参数上传 (24)10.注意事项 (25)11.附录 (25)11.1.卫星接收机COM2输出配置 (25)11.2.差分配置说明 (26)11.2.1.差分基准站设置 (27)11.2.2.差分通讯链路设置 (27)11.2.3.差分移动站设置 (28)11.3.32位CRC校验计算方法 (28)1. 概述KY-INS112组合导航系统由MEMS传感器及高端GNSS 接收机板卡(NovAtel-718D )组成,通过多传感器融合及导航解算算法实现。
该产品可靠性高,环境适应性强。
通过匹配不同的软件,产品可广泛应用于无人机、无人车、测绘、船用罗经、稳定平台、水下运载器等领域。
2. 功能及指标2.1主要功能组合导航系统能够利用GNSS 接收机接收到的卫星导航信息进行组合导航,输出载体的俯仰、横滚、航向、位置、速度、时间等信息;失去信号后输出惯性解算的位置、速度和航姿信息,短时间内具备一定的导航精度保持功能。
无人机CNSS/GLONASS组合导航技术
( N o . 6De p a r t m e n t . Ar m y O ic f e r A c a d e m y o fP L A. He f e i 2 3 0 0 3 1 . i n a )
Ke y wo r d s : UA V; i n t e g r a t e d n a v i g a t i o n ; Be i d o u s a t e l l i t e n a v i g a t i o n s y s t e m; GLONAS S n a v i g a t i o n s y s t e m
摘 要 : 为 实现 无人 机 导 航 系统 覆 盖 范 围大 、精度 高 、动 态 强等 要 求 ,从 分 析我 国无 人机 导 航 现 状入 手 ,研 究 c N s s / G L O N A s s组 合 导航 定位 数据 解 算方 法 。基 于 “ 当前 ”统 计模 型 建立状 态方程 和观 测 方程 ,并 通过 飞行 实验 和 数据 分析 对相 关性 能进 行验 证 结 果表 明 :提 出的 C NS S / GL ONAS S组合 导航 定 位数 据解 算 方法可 实现 2种 系统 的优 势互 补 ,提 高北斗 系统 在无 人机 高动 态导航 中的可 用性 ,增 强 无人导航 精 度 。
Ab s t r a c t :Fo r t h e r e a l i z a t i o n o f l a r g e c o v e r a g e , h i g h p r e c i s i o n, d y n a mi c r e q u i r e me n t s o f UA V n a v i g a t i o n s y s t e m, t h i s p a p e r s t u d i e s t h e d a t a c a l c u l a t i o n me t h o d i n CN S S / GLONA S S i n t e g r a t e d n a v i g a t i o n a n d p o s i t i o n i n g f r o m t h e s t a t u s q u o o f UA V n a v i g a t i o n .Ba s e d o n t h e“ c u r r e n t ”s t a t i s t i c a l mo d e 1 .i t e s t a b l i s h e s t h e s t a t e e q u a t i o n a n d o bs e r v a t i o n e q u a t i o n .a n d v e r i f y t h e p e r f o r ma n c e t h r o u g h f l i g h t e x p e r i me n t a n d d a t a a n a l y s i s .T h e r e s u l t s h o ws t h a t t h e CN S S / GLONASS i n t e g r a t e d n a v i g a t i o n l o c a t i o n d a t a c a l c u l a t i o n me t h o d c a n r e a l i z e c o mp l e me n t a r y a d v a n t a g e o f t wo s y s t e ms .i mp r o v e u s a b i l i t y o f Be i d o u s a t e l l i t e na v i g a t i o n s ys t e m i n U h i g h d y n a mi c s n a v i g a t i o n a n d e n h a n c e n a v i g a t i o n a c c u r a c y .
小型无人机SINS/GPS/视觉组合导航研究

小型无人机SINS/GPS/视觉组合导航研究随着航空技术的不断发展,无人机对导航系统精度和可靠性的要求越来越高。
由捷联惯导系统(SINS)和全球定位系统(GPS)构成的组合导航系统是无人机最为常用的导航系统。
然而,由于GPS存在信号易丢失、易受干扰的缺点,使得SINS/GPS系统在应用上具有一定程度的局限性。
为了扩大其适用范围,充分发挥SINS/GPS导航系统的优势,本文采用了计算机视觉导航技术,对SINS/GPS/视觉组合导航系统进行了研究和分析,并进行了仿真实验。
标签:无人机;捷联惯性导航系统;计算机视觉;组合导航;卡尔曼滤波0 引言随着无人机技术的发展,导航系统的种类也越来越多,通常有惯性导航系统、卫星导航系统、多普勒导航系统和地形辅助导航系统等[1]。
然而,单一的导航装置已难以满足当前实际应用中的飞行要求,多种形式的组合导航方案随之产生,组合方案的采用使各导航系统之间取长补短,利用组合系统提供的冗余信息可以有效提高系统的导航精度和可靠性[2]。
本文针对GPS/SINS组合导航系统中GPS信号易受干扰、易丢失等缺点,提出了SINS/GPS/视觉组合导航方案,提高了系统的可靠性和导航精度,具有一定的工程实际意义。
1 SINS/GPS/视觉组合导航系统方案捷联惯导系统SINS为主导航系统,全球定位系统GPS和计算机视觉系统则作为导航辅助子系统。
SINS采用姿态解算算法将MEMS传感器输出数据解算为需要的导航参数,GPS接收机获取的信号经由计算机转换为用户所需的机体位置和速度参数,而视觉系统则根据连续时刻的图像信息估计机体的姿态参数[2]。
利用SINS系统误差模型、GPS量测误差模型及视觉量测误差模型构成扩展卡尔曼滤波器,两个子滤波器给出局部最优估计,再依据信息融合技术将局部估计有机合成,从而得到捷联惯导系统状态的全局最优估计。
SINS/GPS/视觉组合导航结构如图1所示。
2 SINS/GPS/视觉组合导航系统状态方程的建立本系统采用的组合方式为SINS分别与GPS和视觉系统构成子组合,且都采用输出校正,因而可采用同一组状态方程。
无人机导航与控制系统的设计与实现

无人机导航与控制系统的设计与实现无人机是一种无人操控的飞行器,它具备了一些传统飞行器所不具备的特点,如灵活性、机动性、快速反应能力等。
这使得无人机在多个领域,包括军事、民用、科研等方面有了广泛的应用。
无人机导航与控制系统是无人机正常运行所必需的核心组件,它能够实现无人机的导航和控制功能。
无人机的导航与控制系统设计与实现主要包括以下几个方面:导航模块设计、传感器选择与配置、控制算法开发和底层硬件控制。
首先,无人机的导航模块设计是无人机导航与控制系统中的核心部分。
导航模块需要能够实时获取并处理来自各个传感器的数据,通过集成导航算法来实现无人机的定位、速度估计和航迹规划等功能。
导航模块还需要具备对外部环境变化的适应性,并能够处理异常情况下的应急导航问题。
因此,在设计导航模块时,需要综合考虑无人机的应用场景和任务需求,选择合适的导航算法和传感器组合,并进行系统级的设计和算法优化。
其次,传感器的选择与配置是无人机导航与控制系统设计与实现中的重要一环。
传感器是无人机感知外部环境和获取飞行动态信息的主要手段,影响着导航与控制系统的性能和稳定性。
常用的无人机传感器包括全向摄像头、惯性测量单元(IMU)、超声波/激光测距仪、GPS等。
根据无人机的应用场景和任务需求,合理选择和配置传感器是保证无人机导航与控制系统正确运行的关键。
第三,控制算法的开发是无人机导航与控制系统设计与实现的重要组成部分。
控制算法可以根据导航模块提供的无人机状态信息和飞行目标信息,对无人机进行姿态控制、速度控制和航迹控制。
常用的无人机控制算法包括PID控制器、模型预测控制器和强化学习控制器等。
在开发控制算法时,需要考虑无人机的动力学模型和姿态/运动的约束条件,并通过仿真和实验验证算法的性能和稳定性。
最后,底层硬件控制是无人机导航与控制系统设计与实现过程中不可或缺的一环。
底层硬件控制主要包括对无人机的电机、舵机和传感器等硬件设备的控制。
无人机的电机控制是实现飞行动力学的关键,舵机控制用于实现加速度、姿态和航向的调整。
基于联邦滤波的无人机组合导航系统设计
组合导航
天 文导航
联 邦滤 波
中国法分类号
文献标志码 A
高空 长 航 时 无 人 机 对 于 导 航 系 统 的长 时 间高
受环境 影 响 。
精 度 工作 提 出 了很 高 的 要 求 。 现 在 的 导 航 系 统 种 类 很 多 , 常 采 取 组 合 导 航 的 形 式 取 长 补 短 , 升 通 提
关 于惯 导状 态 的局 部 最 优 估 计 按 融 合 算 法 合 成 为 关 于惯 导状 态 的全局 最优 估计 。
X =【 c
系统 状态 方程 为
b b b ]5 ()
cs= Fc s N N N Xc s+ Gcs c s N N W
() 6
12 量测 方程 的建立 .
选择 捷联 惯导 为 公 共 参 考 系 统 , 子 系 统 分别 与 组合 , 构成 2个 子 滤波器 _ 。 4 J
12 1 SN . . I S与 GP S形 成 的 量 测 量
将 G S导航 仪 输 出 的位 置 和速 度 信 息 与惯 导 P
的相 应输 出信 息相 减得 量测 方程 为
滤波 器 的导航性 能 。
1 组合导航 系统模 型
1 1 状态 方程 的建 立 .
1 1 1 激 光 陀螺捷联 惯导 系统 ..
速度计测量载体的平移运动加速度 , 陀螺仪测量载
体 的转 动 运 动 。 它完 全 依 靠 惯 性 器 件 自主 地 完 成
导 航任 务 , 同外界 不 发 生 联 系 , 有 短 时精 度 高 、 具 输
s 矶 s 曲E A ^ s A
N s A
u ] 3 s () A
() 4
第2章无人机组成及飞行原理
固定翼无人机的结构组成
5、动力装置
目前民用领域主要适用往复式活塞发动机和无刷电动机。无刷电动机多用于多旋翼。 往复式活塞发动机是一种内燃机,由气缸、活塞、连杆、曲轴、机匣和汽化器等组
成。它的工作原理是燃料与空气的混合气在气缸内爆燃,产生的高温高压气体对活塞做 功,推动活塞运动,并通过连杆带动曲轴转动,将活塞的往复直线运动转换为曲轴的旋 转运动。曲轴的转动带动螺旋桨旋转,驱动无人机飞行。整个工作过程包括吸气、压缩、 做功和排气四个环节,不断循环往复地进行,使发动机连续运转。
标称空载KV值 电机KV值定义为“转速/伏特”,意思为输入电压增加1V,无刷电机空转转速增加的
转速值。例如,1000kv电机,外加1v电压,电机空转时每分钟转1000转,外加2v电压, 电机空转就2000转了。单从KV值,不可以评价电机的好坏,因为不同KV值有不同的适 用不同尺寸的浆绕线匝数多的,KV值低,最高输出电流小,但扭力大,上大尺寸的浆; 绕线匝数少的,KV值高,最高输出电流大,但扭力小,上小尺寸的浆。
固定翼无人机的结构组成
3、尾翼
尾翼是用来配平、稳定和操作固定翼无人机飞行的部件,通常包括垂直尾翼(垂尾)和 水平尾翼(平尾)两部分。
水平尾翼由水平安定面和升降舵组成,通常情况下水平安定面是固定的,升降舵是可动的。 垂直尾翼包括固定的垂直安定面和可动的方向舵。方向舵用于控制飞机的横向运动,升降 舵用于控制飞机的纵向运动。 尾翼的形状也是多种多样的,选择尾翼形状,首先要考虑的是能获得最大效能的空气动力, 并在保证强度的前提下,尽量使结构简单、质量轻。
多旋翼无人机的构成
5、动力电源—电池
电池是将化学能转化成电能的装置。在整个飞行系统中,电池作为能源储备,为整个 动力系统和其他电子设备提供电力来源。目前在多旋翼飞行器上,一般采用普通锂电池 或者智能锂电池等。
一种低成本、高集成度的微型无人机组合导航系统设计
( 河南省军区 郑州 4 5 0 0 1 4 )
摘
要
微 型 导航 系统 是 微 型 无 人 机 的 关 键 核 心 技 术 之 一 。论 文着 眼微 型无 人 机 导 航 系 统 一 体 化 、 小型化、 综 合 化 的发 展 趋 势 , 基 于 低
成本 、 高 集 成 度 的惯 性 测 量 单 元 AD I S 1 6 4 0 5和 GP S全 球 定 位 系统 , 以 国产 AR M 微处理器为导航计算核心 , 提 出 了一 种 新 的捷 联 惯 导 系 统 / GP S组 合 导 航 系统 设 计 方 法 。通 过 对 导 航算 法 的研 究 , 硬 件 及 软 件 的设 计 , 研 制了一套体 积小 、 精度 高、 实时性强 的组合 导航系统 , 较 好 地 满 足 了某 微 型无 人 机 的需 求 。室 内试 验 和 车 载 实 验 均 表 明该 系 统导 航 精 度 高 、 性能稳定可靠 。
Cl as s Nu mb e r P2 2 8
l 引 言
微型无人机 因具有 体积小 、 重量 轻 、 携 带方便 、 隐 蔽 性
Hale Waihona Puke 受干扰 、 数据更新频率 低 , 单独 使用也 难 以满足 高速 、 实 时 导航的要求 。因此 , 利用二 者优 势 , 组 合成 可 长时 间工作 、
Abs t r a c t Mi c r o n a v i g a t i o n s y s t e m i s o n e o f t he k e y t e c h n o l o g i e s o f Mi c r o UAV d e v e l o p me nt .I n t he p a p e r .f o c u s i n g o n t h e d e v e l o p
无人机结构与系统课件:组合导航系统
利用多种导航卫星信号有利于误差补偿提高导航定位的精 度和可靠性。
► 系统误差——轨道系统误差、卫星钟差、多路径误 差…;
► 随机误差——信号随机误差、轨道随机误差、钟差随 机误差…;
► 有色噪声——太阳光压、随时间变化的钟差…; ► 异常误差——周跳、变轨误差…。
➢ 此外,因为没有GLONASS卫星的精确轨道源数据, 故无法测定精度。与GPS相比这是GLONASS的个一 主要缺陷。
3)GALILEO存在的主要问题
➢ “伽利略计划”是由欧盟委员会和欧洲空间局共同发起并 组织实施的欧洲民用卫星导航计划,它受多个国家政策和 利益的制约,政策具有摇摆性。
➢ 由于欧盟受美国的影响极大,“伽利略计划”本身的独立 性值得怀疑;
的容错功能。 ➢ 提高导航系统的抗干扰能力,提高完好性。
(4)多传感器组合导航系统
多传感器组合导航系统是指传感器数目多于两个的组合导 航系统,GPS/INS/Loran-C、GPS/Glonass/INS、 GPS/JTIDS/INS等都是实用的例子。在不少应用场合 传感器数目可能大于等于4个,例如GPS/INS/ DNS/Loran-C和GPS/INS/JTIDS/TAN/SAR等。 优点: • 实时性好、容错性强和精度高。 • 未来发展趋势。
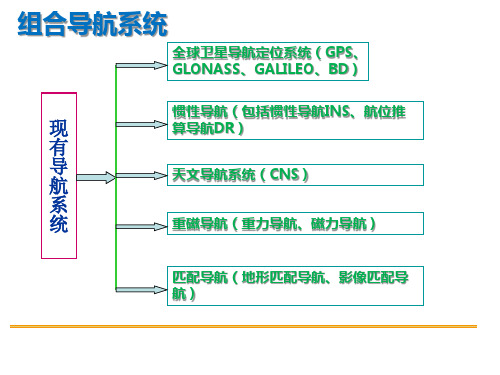
组合导航系统
全球卫星导航定位系统(GPS、 GLONASS、GALILEO、BD)
惯性导航(包括惯性导航INS、航位推
现
算导航DR)
有
导 航
天文导航系统(CNS)
系
统
重磁导航(重力导航、磁力导航)
匹配导航(地形匹配导航、影像匹配导 航)
1.卫星导航存在的问题
1)美国GPS可能存在问题
中国组合导航系统行业发展研究报告
中国组合导航系统行业发展研究报告摘要:组合导航系统是一种基于全球定位系统(GNSS)和惯性测量单元(IMU)的导航技术。
随着全球航空、航海、车载导航和无人机行业的快速发展,组合导航系统在中国市场得到了广泛应用和推广。
本文通过对中国组合导航系统行业的发展进行研究,分析了其市场规模、发展趋势、应用领域以及存在的挑战和机遇。
第一部分:介绍导航技术在人类社会的交通、军事、航空航海等领域起着重要作用。
组合导航系统是一种将GNSS和IMU技术相结合的导航系统,通过将GNSS的定位数据和IMU的惯性测量数据进行融合,可以提供更加精确和可靠的导航定位信息。
在全球范围内,组合导航系统已经成为各种交通工具导航装备的标配。
第二部分:市场分析中国是全球最大的汽车市场和无人机生产制造大国,这为中国的组合导航系统市场提供了巨大的发展机会。
根据市场调研数据显示,中国组合导航系统市场在过去几年里保持着稳定的增长态势。
预计在未来几年,随着无人机行业的快速发展以及对精确定位需求的增加,中国组合导航系统市场将继续保持较高的增长速度。
第三部分:应用领域在中国,组合导航系统主要应用于航空航海、车辆导航和无人机等领域。
航空航海领域是组合导航系统的主要应用领域之一,通过使用组合导航系统,航空航海员可以准确地确定飞机和船只的位置和航向,提高航行安全性。
在车载导航领域,组合导航系统能够提供高精度的导航和定位服务,为驾驶员提供实时的导航信息。
无人机作为近年来兴起的新兴产业,也对组合导航系统有着高度需求,组合导航系统可以帮助无人机实现精确定位和安全飞行。
第四部分:挑战和机遇尽管组合导航系统在中国市场上发展迅速,但仍面临一些挑战。
首先,高成本是一个制约组合导航系统发展的因素之一。
目前,组合导航系统的价格相对较高,这使得一些中小型企业在采购和应用时存在一定的难度。
另外,技术标准和规范的缺乏也是制约行业发。
基于SINS/Doppler/地形匹配的无人机组合导航系统研究
数 字地 图的特点 的基础 上 ,充分 利用 S S短 时精度 高、D p l 测速精 度 高 、地 形 匹配位 置精度 N I ope r
高等优势, 究了基于 S /ope  ̄形 匹配的分布 式容错组合导航 系统 仿真 实验表明,该组 研 l D pl/ NS r
合导航 系统能够 实现 高精度的 自 主定位定向, 且具有一定的容错能力, 具有重要的工程应用价值。
第 5 期
胡浩 园 :基 于 SN / 叩 pe/ 形 匹 配 的无 人 机 组 合 导 航 系 统 研 究 I SD l 地 r
图数 据库 中进行 匹配 的软件算 法 ,而 数 字地 图属 于 是 由卫 星 测 量 或 者大 地 测 量 系 统建 立 的数 据 库 系 统 ,事先 存储 在 系统 中 ,包 含 区域 的高程 等地 形特 征 信 息 , 由于 地 球 上 任 意 一 点 的地 形 特 征 都 不 一 致 ,所 以地形 匹配 可 以达 到较 高精 度 ,但 是依 赖其 它 导航 方法 输 出的位 置 信息 。前述三 种 导航方 式 都
・2 3 4・
现 代 导 航
2I 0 2年
基于 SNSDope/ I / p l 地形 匹配的无人机组合导航系统研究 r
胡浩 园
( 中国 民用航空西北地 区空中交通管理局 ,西安 7 0 8 ) 10 6
摘
要 :为 了提 高无人 机导 航 系统 的 自主性 、可 靠性和 高精度 ,在分析 了 SNS ope、 I 、D p l r
s mea it f a ltlrn e a dv r otn o n ie r ga piain . o b l o uto ea c , n eyi i y f mp ra t r gn ei p l t s f e n c o
无人机发展和系统组成第二章

(2)自转旋翼机
自转旋翼机简称旋翼机。旋翼机 与直升机的最大区别是:旋翼机 的旋翼不与发动机传动系统相连, 因此,发动机并不能驱动旋翼旋 转为飞机提供升力。旋翼机的飞 行过程中是:发动机驱动水平布 置的螺旋桨产生向前的推力,使 旋翼机产生一定的向前的运动速 度,从而使相对运动的气流吹动 旋翼旋转产生升力,使旋翼机飞 行。旋翼机必须像固定翼航空器 那样滑跑加速才能起飞,因此, 不能像直升机那样进行稳定的垂 直起降和悬停。
(3)对外场使用、维护、场地、地面保障等方面的要求相对较低。 (4)与有人驾驶飞机相比可靠性指标要求较低。
1. 固定翼平台
固定翼飞行平台是使用数量最多的无人机平台,它 由固定在机体上的机翼产生升力,并由装在机体上 的动力装置产生前进的推力或拉力,从而使飞机飞 行。 固定翼飞行平台是使用数量最多的无人机平台,它 由固定在机体上的机翼产生升力,并由装在机体上 的动力装置产生前进的推力或拉力,从而使飞机飞 行。
25~ 32 3~ 4 <10
1650 ~3200 658 ~1100 <0.1
人机 短距/垂直起降无人机 侦察、监视、搜索等
不同用途的无人机对动力装置的要求也不相同。对一次性使用的靶机、自杀式 无人机、导弹等动力装置,主要要求其推重比高、抗过载和抗进口气流畸变能力 强,而寿命可以较短;对无人战斗机的动力装置,主要要求其工作包线宽、加减 速性能好、巡航耗油率低、隐身性能好;对高空长航时无人机的动力装置,则要 求其耗油率低、寿命长、飞行范围广、高空特性好;对于微小型低空无人机的动 力装置由于所需功率较小,因此要求其质量小,成本低。
固定翼无人机飞行平台可以根据技术需求的不同设计成不同的形状, 但其主要结构与有人驾驶飞机非常类似,主要包括机身、机翼、尾翼、 起落架等结构,各组成部分在无人机飞行过程中所起到的作用如下:
小型无人机SINSGPS组合导航系统研究

合导航系统的联邦滤波算法, 并对该导航系统进行了静态和动态实验 。实验结果表明: 采用联邦 Kalman 滤波能够有效的消除 导航参数误差, 提高导航精度。该导航系统可以满足小型无人机的导航要求 。 关键词 惯性导航 联邦 kalman 滤波 数据融合 A 组合导航 中图法分类号 V249. 32 ; 文献标志码
^
822
科
学
技
术与工ຫໍສະໝຸດ n程13 卷
方差阵 P i 送入主滤波器按一定的融合规则进行全 局的状态估计 X g 和对应的协方差矩阵 P g 。 系统状态方程的信息包括状态估计协方差的
-1 -1 信息 P i 和过程噪声方差的信息 Q i 。状态方程信 ^ ^
βi ∑ i =1 1. 3. 2
^
+ β m = 1 ( 0 !β i !1 ) 。
来表示
[2 —4 ]
。其中公共系统的信息
[5 ]
在子系统中的分配按照信息守恒原理
进行。
基于联邦滤波器的多传感器信息融合 多传感器信息融合技术是利用不同信号源在
X i ( k + 1 / k + 1 ) = X i ( k + 1 / k) + K i ( k + 1 ) × ( Zi ( k + 1 ) - Hi ( k + 1 ) X i ( k + 1 / k) ) ; Pi ( k + 1 ) = ( I - Ki ( k + 1 ) Hi ( k + 1 ) ) × P i ( k + 1 / k) ( I - K i ( k + 1 ) Hi ( k + 1 ) ) 1. 3. 4
2012 年 9 月 6 日收到 第一作者简介: 梁振东( 1982 —) , 男, 汉族, 河南省郑州市人, 硕士, 研究方向: 计算机信息处理, 微系统研究。
飞控,最全面的无人机飞控讲解,带你了解导航飞控系统的功能

飞控,最全⾯的⽆⼈机飞控讲解,带你了解导航飞控系统的功能导航飞控系统定义:导航飞控系统是⽆⼈机的关键核⼼系统之⼀。
它在部分情况下,按具体功能⼜可划分为导航⼦系统和飞控⼦系统两部分。
导航⼦系统的功能是向⽆⼈机提供相对于所选定的参考坐标系的位置、速度、飞⾏姿态、引导⽆⼈机沿指定航线安全、准时、准确地飞⾏。
完善的⽆⼈机导航⼦系统具有以下功能:(1)获得必要的导航要素,包括⾼度、速度、姿态、航向;(2)给出满⾜精度要求的定位信息,包括经度、纬度;(3)引导飞机按规定计划飞⾏;(4)接收预定任务航线计划的装定,并对任务航线的执⾏进⾏动态管理;(5)接收控制站的导航模式控制指令并执⾏,具有指令导航模式与预定航线飞⾏模式相互切换的功能;(6)具有接收并融合⽆⼈机其他设备的辅助导航定位信息的能⼒;(7)配合其他系统完成各种任务飞控⼦系统是⽆⼈机完成起飞、空中飞⾏、执⾏任务、返⼚回收等整个飞⾏过程的核⼼系统,对⽆⼈机实现全权控制与管理,因此飞控⼦系统之于⽆⼈机相当于驾驶员之于有⼈机,是⽆⼈机执⾏任务的关键。
飞控⼦系统主要具有如下功能:(1)⽆⼈机姿态稳定与控制;(2)与导航⼦系统协调完成航迹控制;(3)⽆⼈机起飞(发射)与着陆(回收)控制;(4)⽆⼈机飞⾏管理;(5)⽆⼈机任务设备管理与控制;(6)应急控制;(7)信息收集与传递。
以上所列的功能中第1、4和6项是所有⽆⼈机飞⾏控制系统所必须具备的功能,⽽其他项则不是每⼀种飞⾏控制系统都具备的,也不是每⼀种⽆⼈机都需要的,根据具体⽆⼈机的种类和型号可进⾏选择、裁剪和组合。
传感器⽆⼈机导航飞控系统常⽤的传感器包括⾓速度率传感器、姿态传感器、位置传感器、迎⾓侧滑传感器、加速度传感器、⾼度传感器及空速传感器等,这些传感器构成⽆⼈机导航飞控系统设计的基础。
1.⾓速度传感器⾓速度传感器是飞⾏控制系统的基本传感器之⼀,⽤于感受⽆⼈机绕机体轴的转动⾓速率,以构成⾓速度反馈,改善系统的阻尼特性、提⾼稳定性。
无人机技术基础与技能训练课件:无人机航电系统

厂商提供的速度、转矩数据和测试电压有关。目前,市面上的大部分舵机 以4.8v/6v直流电源供电。 (4)尺寸、重量和材质
12
第2章 无人机系统组成 通信链路系统
1. 数传链路 无人机数据链路主要完成地面控制站对无人机的遥控、遥测、任务传感器 等信息的传输,实现地面控制站与无人机之间的数据收发和跟踪定位。遥 测链路有数传模块和地面站两部分组成。数传模块包含机载收发模块和地 面站收发模块,如图所示。
6
无人机航电系统
遥控器
1.通道 通道其实就是遥控器可以控制同时控制的动作路数。四轴在控制过程中需 要控制的动作路数有:上升下降、左右运动、前后运动、偏航运动,姿态 调整,所以无人机飞行最低需要5通道遥控器。 第一通道一般指副翼,用来控制固定翼的两片副翼,以改变飞机的姿态。
第二通道指升降,用来控制固定翼的水平尾翼,使机身抬头和低头,从而 上升下降。
1
无人机航电系统 飞控系统
3.飞控板功能 (1)处理来自遥控器的信号,完成要求的飞行姿态或其他指令。 (2)控制电调,给电调发送信号调节电机转速,实现控制改变飞行姿态 的功能。 (3)通过一些板载的测量元件,通过控制电调的输出信号保持多旋翼无 人机的稳定。
2
无人机航电系统
传感器
1.陀螺仪
陀螺仪就是角速度传感器,是利用陀螺效应原理制造出来用来测量物体角 速度的一种传感器。陀螺仪如图所示。
无人机航电系统 飞控系统
1.飞控组成 无人机的飞行控制系统主要由陀螺仪,加速计,地磁感应,气压传感器, 超声波传感器,光流传感器,GPS模块以及控制电路等组成。主要的功能 就是自动保持飞机的正常飞行姿态。 2.工作原理 无人机飞控系统实时采集各传感器测量的飞行状态数据、接收无线电测控 终端传输的由地面测控站上行信道送来的控制命令及数据,经计算处理, 输出控制指令给执行机构,实现对无人机中各种飞行模态的控制和对任务 设备的管理与控制;同时将无人机的状态数据及发动机、机载电源系统、 任务设备的工作状态参数实时传送给机载无线电数据终端,经无线电下行 信道发送回地面测控站。
无人机组合导航系统的自适应滤波研究
Ad p i e Fit r Re e r ho nt g a e v g to se fUAV a tv le s a c n I e r t d Na i a i n Sy tm o
G O Qag L u-a ,I ica ,HA G Meg n U i ,I iloJA J— hoZ N n — i n S
摘 要 : 人 机 组 合 导 航 滤 波 器 的 设 计 需 要 考 虑 器 件 和 外 部 环 境 不 稳 定 带 来 的 影 响 , 时 在 飞 行 过 程 中 也 面 临 着 组 合 导 航 系 无 同
统噪声和量测噪声统计特性不确定问题 , 从而导致滤波精度低 , 稳定性 差 , 甚至有可 能发散 , 传统常规 卡尔曼滤波 无法解决
ABS TRACT :t se s n il o c n i e e af c fcr u tn ea d sa i t f p a au e e in n rc ia I i s e t o sd rt f t i ms c n tb l y o p r t swh n d sg i g ap a t l at h e o c a i a c i e AV n e r td n v g t n,me n h l ih as a e i h n e ti r b e f s s m os n f t rfr U l o i tg a e a i ai o a w i whc l f c s w t t e u c r n p o lms o y t n ie a d e o h a e me s r me tn ie sait a c a a trsis o o i e a iain i h o r eo e f g t wh c c d o lW a — a u e n os tt i l h r ce it fc mb n d n vg t n t e c u f h ih . ih la st c sc c o s t l O
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无人机 动平 台组合 导航 系统
程 虹 霞 ,骆 云 志
( 国 兵 器 工 业 第 五 八 研 究 所 军 品 部 , 四 川 绵 阳 6 10 ) 中 2 00
摘 要 :以无人 机 动平 台的组合 导航 系统 为对 象,根据 无人 机 动平 台导 航 的 高精 度 的使 用要 求 ,运 用导航 定位 系 统 整体 设计 思 想 ,对 组合 导航 系统 进行 原 理分析 ,组建 了机 动 平 台组合 导航 系统 的 系统 模型 ,并基 于联 邦卡 尔曼滤
Un a n d M o i af r ’ I t g a e v g to y tm m n e b l Plto m s n e r td Na i ai n S se e
CHENG n — i , Ho g x a LUO n z i Yu — h
( p . f ma n r d cs No 5 e e r hI si t o h n r n n eI d s is M in a g 6 1 0 , h n ) De t o Ar me t o u t, . 8 R s a c t u e f i aO d a c n u t e , a y n 2 0 0 C i a P n t C r
Ab t c: a igitgae a iainsse o n n e bl lt r a h betB ss ihp eiinrq et s at T kn e rtdn vg t y tm f man dmo i paf m s eo jc. a e g -rcso e u s r n o u e o t h
f s o a i a i n u i g t e k l n fl rn e h o o y E p rm e ts o h t h y t m a o d p r o ma c , n e u i n n v g to sn h a ma i e i g t c n l g . x e i n h wst a e s se h sg o e f r n e a d me t t t t eu ma n d m o ie p a f r sn v g t n h n n e b l l to m‘ a i ai . o Ke wo d : m a n d mo i l to m ; n e r t d n v g t n; l n fl r y r s Un n e b l p a f r I t g a e a i a i e o Ka ma it e
o l to m a i a i n a d a o t g t e wh l y t m h o y h a h m a i a o e f i t g ae a i a i n s t m s fp a f r n v g to n d p i h o e s s e t e r ,t e m t e tc lm d lo n e r t d n v g to yse i n e t b ih d a t r a a y i g i rn i l .Re l e n n e s a ls e fe n l z n t p i c p e a i d u ma n d mo ie p a f r i t g a e a i a i n S h g r c s o a e z b l l to m n e r t d n v g to ’ i h p e i i n d t
兵 工 自动 化
・7 ・ 0
2 00 01 . 2
O r a c n us r t m a i dn n e I d t y Au o ton
2 () 9 2
d i 1 .99j sn1 0 ・5 62 1 .20 3 o: 03 6/.s . 617 .0 00 .2 i 0
组合导 航 系统
如 何 提 高 导 航 系 统 的精 度 和 可靠 性 成 为 一 项 具 有 重
要 现 实 意 义 的课 题 。 目前 , 尚没 有 导航 方 式 能够 同 时满 足 精 度 与 可 靠 性 的要 求 【 ,须 进 行 组 合 导 航 。 2 】 组 合 导 航 系统 是将 机 动 载 体 上 的 某 些 或 全 部 导 航 设
0 引 言
高 精 度 导 航 信 息 将 使 作 战 单 位 能 按 照 指挥 员 的
意 图 ,在 准 确 的 时 间 出现 在 精 确 的地 点 , 这 是 新 型 作 战 思 想 的 要 求 l 。 因此 ,在 高 技 术 现 代 战争 中 , 】 】
卡 尔 曼 滤 波 器 的 信 息 融 合 算 法 的设 计 ,是 整 个 组 合 系 统 的 核 心 部 分 , 于 实 时 地 估 计 系 统 的 误 差状 态 , 用 然 后 依 据 最 小 均 方 误 差 估 计 的控 制 规 律 ,对 惯 性 导 航 系 统 进 行 反 馈 修 正 ,从 而 提 高 系 统 的导 航精 度 。
l
.
1迹 算 统IGS 航系 I I 航 推 系 l 导 统 — P cBiblioteka 肇 . .
备 组 合 成 一个 统 一 的 系 统 ,利 用 两 种 或 两 种 以上 的
波的信 息 融合技 术 ,最终 实现 了无 人机 动 平 台组合 导航 系统 的 高精度 数据 融合导 航 。 实验证 明,该 导航 系统 性 能 良
好 , 能够 满足无 人机 动 平 台的导航 需要 。 关 键词 :无人 机 动平 台;组合 导航 ; 卡 尔曼滤 波 中图分 类 号 :T 6 . N9 71 文 献标 识码 :A