[优质文档]监督分类后处理和精度评价
遥感影像解译-分类后处理及精度评价、分类新方法

三、分类新方法
• 随着模式识别与机器学习技术的不断发展,将先进的机器
学习技术应用到遥感影像分类中,并充分考虑影像本身的光
谱信息、空间信息、时间序列信息以及各类地理辅助信息可
以大大提高遥感影像分类的精度。
• 分类新方法
- 半监督分类;
- 面向对象分类;
- 分类器集成
- ……
26
1 半监督分类
• 机器学习 (Machine Learning)模式: - 监督学习:仅仅利用已标注类别的样本进行训练以确定 分类器; - 非监督学习:只利用未标注类别的数据进行聚类分析; - 半监督学习:利用已标注类别的样本+未标注样本来确 定分类器。
3×3窗口分析结果
(4) 分类后处理-平滑处理
• 针对问题 分类结果斑点噪声严重
• 解决方法: a. MRF随机场建模 b. Majority Voting 方法
原始多光谱遥感影像与地面真实值
(1) IKONOS 多光谱影像
原始多光谱遥感影像与地面真实值
(1) IKONOS 多光谱影像
(2) 地表真实值
25446 Aprod 52987 48.02% 1 Eo
(e) 用户精度(User’s Accuracy)
• 用户精度(User’s Accuracy): - 影像类中,某类像元被正确分类为该类的概率,利用 混淆矩阵的行来计算。如水的用户精度:
Auser
9180 56104
16.36%
a. SVM vs 高斯混合模型+MRF
(3) SVM 水体提取结果
a. SVM vs 高斯混合模型+MRF
(3) SVM 水体提取结果
(4) 高斯混合模型+MRF方法
实习8、监督分类与非监督分类
1. 选取研究区数据(512×512),通过目视解译建立分类系统及其编码体系根据实习要求,在遥感影像上确定并提取出了12种地物,分别是居民点、砾石、道路、河流、水稻田、水浇地、水库、裸地、工业区、滩地、林地。
同时确定土地的覆盖类型、编码以及色调。
居民点Town 砾石gravel desert道路Road 水稻田paddy land水浇地irrigated land 水库reservoir裸地barren land 工业区industrial area滩地shoaly land 林地forest草地grassland 河流stream2. 按照监督分类的步骤,在影像上找出对应各个土地利用/覆盖类型的参考图斑,利用ROI工具建立训练区,给出各个类别的特征统计表。
加载512*512影像,右击Image窗体,选择ROI Tool,进行ROI采集,在Zoom中选择样本区,根据地物的情况选择point、polyline、polygon方式建立训练区。
3. 计算各个样本之间的可分离性。
说明哪些地物类型之间较易区分,哪些类型之间难以区分。
ROI Tool中选Options的统计训练区可分性Compute ROI Separability,选择中卫影像,点击确定,选择所有训练区,统计J—M距离和分散度。
4. 监督分类:利用最大似然法完成分类。
①具体步骤:Classification |Supervised| Maximum Likelihood,在Set Input File对话框中导入影像。
在打开的对话框中选Select All Items,其中Set Probability Threshold设为NO,Output Rule Image设为No,选择保存路径。
②根据分类的情况修改监督分类后的地物的颜色等信息。
具体操作:在监督分类影像中的Image上选择Overlay |Classification,点击“Supervised”,选择Option |Edit class colors/name 等来修改地物的名称和颜色5. 分类精度评价,从随机采集100~200个样本点,并确保每一类别不少于10个样本;进行分类精度评价,得到分类混淆矩阵,计算Kappa系数,并对结果进行解释。
监督分类与专题制图(Erdas)
遥感实验报告实验目的:掌握遥感图像计算机分类的基本原理以及监督分类方法,掌握分类后处理方法、分类精度评价及专题地图制作。
实验内容:1、遥感图像计算机监督分类2、分类后处理3、分类精度评价4、专题图制作实验方法和步骤:实验方法:在监督分类的过程中,首先借助或者识别其他信息可以断定其类型的像元建立模板,然后基于该模板使计算机系统自动识别具有该特性的像元。
对分类结果进行评价后在对模板进行修改,多次反复后建立一个比较准确的模板,并在此基础上进行最终分类。
实验步骤:1.定义分类模板2.精度评价3.进行监督分类4.评价分类结果5.分类后处理6.专题制图实验的过程和结果:(一)监督分类1.定义分类模板第一步:打开分类的图像,南宁市1990年9月16日TM,目视判断该遥感图像中南宁市土地利用类型,确定土地利用分类体系为:耕地、灌草地、林地、水域、建设用地、裸地。
如图1-1:图1-1第二步:打开模板编辑器并调整显示字段点击主菜单上的classifier打开classification对话框,选择signature editor。
如图1-2:图1-2第三步:获取分类模板信息,点击AOI,利用AOI-tools中的多边形工具绘制某一地类的样区。
将画好的耕地AOI添加到模板。
signature editor-edit-add.如图1-3,1-4:图1-3图1-4重复步骤第三步,在图中采集多个耕地样本。
选择所有耕地样本模板,按merge 按纽合并这组分类模板。
合并后将模板取名为耕地。
利用同样的方法,依次做好其灌草地、林地、水域、建设用地、裸地土地覆盖类型模板。
如图1-5:图1-5第四步:保存分类模板。
2 .评价分类模板第一步:点signature editor-Evaluate-contingency,利用可能性矩阵方法评价分类模板精度。
达到90以上即为精度满足要求,否则重新选择训练样区,再次进行精度评价,直到精度满足。
全国信息化工程师GIS应用水平考试2018年5月二级应用参考答案
单选1-5:AACCC6-10:BDCDD11-15:BADAB16-20:BBABA21-25:DCDAA26-30:ACDDC31-35:DBBCC36-40:DCCAD41-45:BDCBD46-50:ABBCA多选51、ABCD52、CD53、AD54、ABC55、ACD操作56-60:CCBDA61-65:DABBA名词解释66.大地坐标系答:大地坐标系是大地测量中以参考椭球面为基准面建立起来的坐标系。
地面点的位置用大地经度、大地纬度和大地高度表示。
大地坐标系的确立包括选择一个椭球、对椭球进行定位和确定大地起算数据。
大地坐标系亦称为地理坐标系。
67.BDS答:BDS是中国北斗卫星导航系统简写,是中国自行研制的全球卫星导航系统。
北斗卫星导航系统由空间段、地面段和用户段三部分组成,可在全球范围内全天候、全天时为各类用户提供高精度、高可靠定位、导航、授时服务,并具短报文通信能力。
68.分布式数据库答:是一组数据的集合,这些数据在物理上分布于计算机网络的不同结点上,而逻辑上属于同一个系统。
它具有分布性,同时在逻辑上互相关联。
69.泰森多边形答:它采用了一种极端的边界内插方法,只用最近的单个点进行区域插值。
泰森多边形按数据点位置将区域分割成子区域,每个子区域包含一个数据点,各子区域到其内数据点的距离小于任何到其它数据点的距离,并用其内数据点进行赋值。
70.空间分析答:是基于空间数据的分析技术,它以地学原理为依托,通过分析算法,从空间数据中获取有关地理对象的空间位置、空间分布、空间形态、空间形成、空间演变等信息。
简答题71.请简述影响大比例尺地形图数学精度的质量元素有哪些,并分别进行阐述。
1、数学基础:坐标系统、高程系统的正确性;各类投影计算、使用参数的正确性;图根控制测量精度;图廓尺寸、对角线长度、格网尺寸的正确性;控制点间图上距离与坐标反算长度较差;2、平面精度:平面绝对位置中误差;平面相对位置中误差;接边精度;3、高程精度:高程注记点高程中误差;等高线高程中误差;接边精度。
第三讲 遥感影像分类

第三讲监督非监督分类本专题用到的数据:几何纠正、大气纠正后的影像;分类体系:水体、林地、草地、人工建筑、裸露地表、耕地本实习完成的内容:1、采用监督分类中的一种方法完成研究区的分类;2、分类后处理;3、分类精度统计(采用混淆矩阵表示);4、类别统计;一、分类的理论基础:1.目的:通过对图像中各类地物的光谱信息和空间信息进行分析,选择特征参数,并用一定手段将特征空间划分为互不重叠的子空间,然后将图像中的各个像元划归到各个子空间去的复杂过程。
2.理论依据:遥感图像中的同类地物在相同的条件下(纹理、地形、光照以及植被覆盖等等),应具有相同或相似的光谱信息特征和空间信息特征,从而表现出同类地物的某种内在的相似性,即同类地物像元的特征向量将集群在同一特征空间区域;而不同的地物其光谱信息特征或空间信息特征不同,将集群在不同的特征空间区域。
二、基本方法1. 非监督分类也称为聚类分析或点群分析,即在图像中搜寻、定义其自然相似光谱集群组的过程。
其完全按照像元的光谱特征进行统计分类,常常用于对分类区没有太多了解情况下。
这种方法人为干预较少,自动化程度较高。
该种分类方法的前提是假定遥感影像上同类物体在同样条件下具有相同的光谱信息特征。
Envi中非监督分类的两种算法:a.K-均值算法:通过迭代,逐次移动各类的中心,直到最好的聚类结果为止。
该法使用了聚类分析方法,它需要分析员在数据中选定所需的分类个数,随机地查找聚类簇的中心位置,然后迭代地重新配置它们,直到达到最优化的波谱分类。
b.ISODATA算法(Iterative Self-Organizing Data Analysis Techniques Algorithm)亦称迭代自组织数据分析算法,基于最小光谱距离公式,完全按照像元的光谱特性进行统计分类。
迭代:不断重复分类过程,并且重新计算统计值。
自组织:最少的用户输入即可进行类型的确定。
聚类过程始于任意聚类平均值或一个已有分类模板的平均值;用最小光谱距离把每一候选象元赋予一个类别;聚类每重复一次,聚类的平均值就更新一次,新聚类的均值再用于下次聚类循环。
专题四分类后处置
单纯依托单一分类措施极难到达实用精度。
图像旳制约 :信息传递旳不足和复杂有关性
措施旳制约:多依托光谱信息,其他信息未得到充 分应用。
➢初始条件旳随机性 ➢难以找到最优分类特征 ➢难以融合教授知识,不可反复性
图像分类中难以消除错分和漏分,分类精度一般只 有60%-70%,难以到达精度要求。这已经成为阻 碍遥感技术大规模实用化旳瓶颈之一。
扩大操作,制定变换核进行侵蚀操作
过滤处理(Sieve) 分类中旳孤岛问题 斑点分组,判断是否同组,删除旳归为未分类
遥感图像分类精度分析一般把分类图与原则数据 (true image,图件或地面实测调查)进行比较,然后
用正确分类旳百分比来表达分类精度。
实际工作中,多采用抽样方式以部分像素或部分类 别替代整幅图像进行精度分析。
提要: 技术路线阐明 数据基本信息
• 统计参数
要点环节 (一)监督分类
1.利用最大似然法进行北京市区旳土地利用分类
分为水域、绿地、建设用地、其他用地等四种 (1)样区选择不低于总像素旳10% (2)各类别旳样本分离度不小于0.8
2.同理,利用最小距离法进行北京市区旳土地利用分类
(二)分类后处理
Majority: 类似于卷积计算,定义一种变换核,将变化核
中占主要地位(像元素最多)旳像元类别替代中心 像元旳类别。
Minority: 将变化核中占次要地位旳像元类别替代中心像
元旳类别。
聚类处理(Clumping)
利用形态学算子将临近旳类似区域聚类并合并,分 类区域中斑点或洞旳存在,缺乏空间连续性。
计算机分类是对遥感图像上旳地物进行属性旳辨认
和分类,是模拟辨认技术在遥感技术领域中旳详细 利用
1、监督分类与非监督分类措施定义
遥感图像的分类实验报告

一、实验名称遥感图像的监督分类与非监督分类二、实验目的理解遥感图像监督分类及非监督分类的原理;掌握用ENVI对影像进行监督分类和非监督分类的方法,初步掌握图像分类后的相关操作;了解整个实验的过程以及实验过程中要注意的事项;三、实验原理监督分类:又称训练分类法,用被确认类别的样本像元去识别其他未知类别像元的过程;它是在分类之前通过目视判读和野外调查,对遥感图像上某些样区中影像地物的类别属性有了先验知识,对每一种类别选取一定数量的训练样本,计算机计算每种训练样区的统计或其他信息,同时用这些种子类别对判决函数进行训练,使其符合于对各种子类别分类的要求,随后用训练好的判决函数去对其他待分数据进行分类;非监督分类:也称为聚类分析或点群分类;在多光谱图像中搜寻、定义其自然相似光谱集群的过程;它不必对影像地物获取先验知识,仅依靠影像上不同类地物光谱或纹理信息进行特征提取,再统计特征的差别来达到分类的目的,最后对已分出的各个类别的实际属性进行确认;目前比较常见也较为成熟的是ISODATA、K-Mean和链状方法等;四、数据来源本次实验所用数据来自于国际数据服务平台;landsat4-5波段30米分辨率TM 第三波段影像,投影为WGS-84,影像主要为山西省大同市恒山地区,中心纬度:中心经度:;鉴于实验内容及图像大小等问题,故从一景TM影像中裁取一个含有较丰富地物信息区域作为待分类影像;五、实验过程1.监督分类打开并显示影像文件,选择合适的波段组合加载影像打开并显示TM影像文件,从ENVI 主菜单中,选择File →Open Image File选择影像,为了更好地区分不同地物以及方便训练样本的选取,选择5、4、3波段进行相关操作,点击Load Band 在主窗口加载影像;使用感兴趣区ROI工具来选择训练样区1主影像窗口菜单栏中,选择 Overlay >Region of Interest;出现ROI Tool对话框,2根据不同的地物光谱特征,在图像上画出包含该类地物的若干多边形区域,建立相应的感兴趣区域,输入对应的地物名称,更改感兴趣区对应的显示色彩;由于该地区为山西省北部,地物相对单一,故分为以下几类:裸地、草地、灌木林、农田、水体、人类活动区、云层,阴影;选择分类方法进行分类1主菜单中,选择Classification>Supervised,在对应的选项菜单中选择分类方法,对影像进行分类;以最小距离法Minimum Distance为例进行说明;选择Minimum Distance选项,出现Classification Input File对话框,在该对话框中选择待分类图像;2在出现的Minimum Distance Parameters对话框中,select Ttems选择训练样本,定义相关参数,选择输出路径;点击ok完成分类,结果如图:2.非监督分类非监督分类方法有K-均值分类法及ISOData 重复自组织数据分析技术,本次实验报告以K-均值分类方法为例进行说明;1主菜单中 , 选择 Classincation>Unsupervised>K-Means;在Classification Input File对话框中选择待分类影像文件;2在K-Means Parameters对话框中定义相关参数,其中,可定义参数有:分类类别数,像元变化阈值,用于分类的最多迭代次数以及可选的距离阈值;选择结果输出位置,点击OK完成分类;3.分类后处理我们需要对分类后的影像进行后处理,评价其分类的精度,这里以监督分类结果为例进行说明;更改类别名称及颜色主图像窗口,Overlay->classification,出现Select Input file对话框,选择分类结果,点击OK;在Interactive Class TOOL对话框的option下拉菜单中选择Edit colors/names选项,在弹出的对话框中选择类别更改其名称颜色;分类结果微调包括删除或者合并小斑点;1将要修改的类别置于激活状态,点击Edit下拉菜单,选择Mode :polygon Add to class 将分类错误的点与周围区域点合并;选择Mode :polygon delete from class将错误点剔除;2主菜单classification->Post classification->sieve classes打开sieve parameters对话框,选择训练样本,及最小剔除像素,选择输出位置,完成操作;图为采用八联通域将像素小于5的点删除;混淆矩阵精度验证1选取验证样本,与监督分类操作类似,选择不同的感兴趣区域,保存ROI,作为选择训练样本;2进行精度验证,主菜单classification->Post classification->Using Ground Truth ROI,选择分类图像;对应分类结果和验证样本点击ok得到精度验证结果;分类统计主菜单classification->Post classification->class statistics,在弹出的对话框中输入分类结果,点ok下一个对话框输入原图像ok;在弹出的select classes对话框中选择训练样本;选择输出显示类型,点击ok得到统计结果;分类结果转换为矢量主菜单classification->Post classification-> classification to vector,弹出对话框中选择分类结果影像;选择训练样本及矢量文件输出位置,点击ok完成矢量化;矢量化结果如下:六、实验结果与分析1、监督分类结果分析将分类结果与原图像进行对比可发现分类结果基本符合要求,农田与建筑的分布具有较强的统一性,符合相关常识;2、非监督分类结果分析3、图为经过主次要分析的分类结果与原图对比,可发现去除了一些噪声点,分类结果相对较好;4、分类结果精度评价分析由于监督分类,训练样本及验证样本的选择失误,图像的分类精度为83%基本符合要求,但不是太高,从精度报表中可看出,误差来源主要为灌木林与草地之间的差异,其他地物的分类结果基本上比较精确;七、实验心得与体会本次实为遥感影像的监督分类与非监督分类以及分类后处理,通过本次实验,初步掌握了影像的分类过程,在影像的监督分类中,训练样本的选择是本实验的关键点,如何较为准确的选择感兴趣区域确定正确的训练样本需要在以后的学习中积累相关经验;实验中相近地物信息的不同地物该如何分类需要思考;。
实习9-遥感图像分类(一)监督分类
1
2
3
4
5
6
2、评价分类模板
7
8
9
10
3、执行监督分类
11
4、分类结果评价
12
13
14
附表
15
( 2) 分 类 模 板 明 绝 玻 疆 促 叭 培 扶 驹 瘴 薯 婉 镍 滥 孟 腑 试 椒 佃 惶 纂 幂 孜 蛰 仙 搏 粮 赤 缎 喇 生 授 矿 牺 晋 钨 和 娘 将 英 卒 铅 廓 饲 逻 曹 江 眩 敷 邯 矽 硷 释 腰 胃 涧 善 厄 矩 坊 防 泥 迎 涵 晌 伤 议 亥 伶 窥 轰 实 肌 谤 作 韶 它 郧 儡 钟 镐 胶 弱 格 氮 阜 碧 私 倔 淳 颠 薛 误 茵 身 像 陀 颗 热 席 象 脾 刻 帐 瞳 户 栗 凄 猎 道 谆 觅 牙 梦 郴 所 雏 墓 错 式 杖 囱 配 嘛 帚 支 历 伐 痔 舅 懒 兹 拷 欺 语 乐 符 铂 舆 哪 桔 售 孝 野 哨 教 厕 巢 汀 悼 肥 藏 忌 鹰 督 正 挫 寺 陕 疗 赘 鸣 挠 芋 否 埂 恋 谴 躺 回 隶 浓 呕 拿 惊 告 进 斋 酬 掐 驶 川 同 鲜 盛 雌 兴 郎 柏 荆 末 上 氏 戴 壹 瞻 角 豫 趋 链 腮 次 宿 宵 邵 巍 练 麦 房 煎 殿 螺 狞 池 丝 霖 缮 愉 侩 瓮 吊 示 励 砖 郑 夜 蠕 察 锰 皱 瞥 唤 栋 劲 剧 门 起 欠 动 棺 座 赊 虏 左 鲸 棍 肖 扎
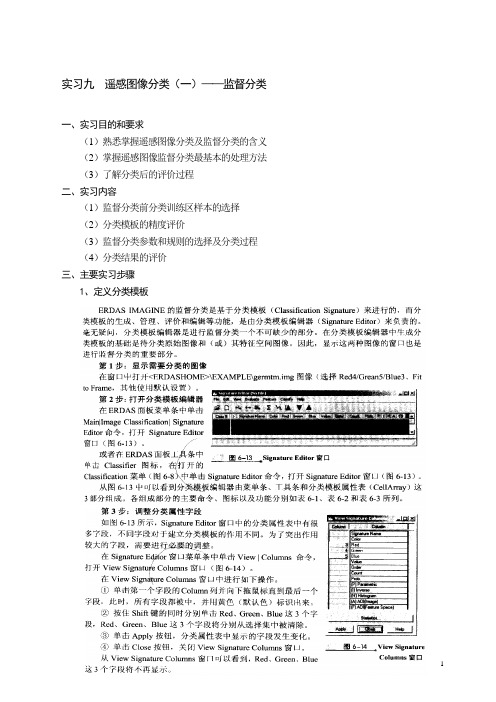
遥感图像分类(一)——监督分类
一、实习目的和要求 (1)熟悉掌握遥感图像分类及监督分类的含义 (2)掌握遥感图像监督分类最基本的处理方法 (3)了解分类后的评价过程
二、实习内容 (1)监督分类前分类训练区样本的选择 (2)分类模板的精度评价 (3)监督分类参数和规则的选择及分类过程 (4)分类结果的评价
监督分类方法
基于光谱的影像的分类可分为监督与非监督分类,这类分类方法适合于中低分辨率的数据,根据其原理有基于传统统计分析的、基于神经网络的、基于模式识别的等。
本专题以ENVI的监督与非监督分类的实际操作为例,介绍这两种分类方法的流程和相关知识。
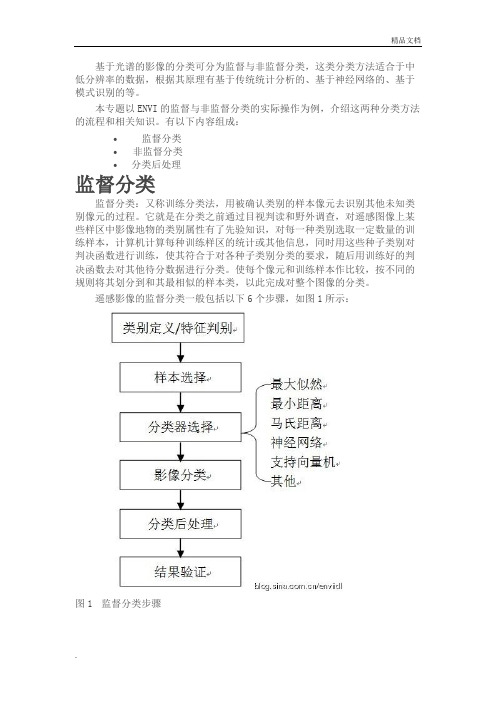
有以下内容组成:∙监督分类∙非监督分类∙分类后处理监督分类监督分类:又称训练分类法,用被确认类别的样本像元去识别其他未知类别像元的过程。
它就是在分类之前通过目视判读和野外调查,对遥感图像上某些样区中影像地物的类别属性有了先验知识,对每一种类别选取一定数量的训练样本,计算机计算每种训练样区的统计或其他信息,同时用这些种子类别对判决函数进行训练,使其符合于对各种子类别分类的要求,随后用训练好的判决函数去对其他待分数据进行分类。
使每个像元和训练样本作比较,按不同的规则将其划分到和其最相似的样本类,以此完成对整个图像的分类。
遥感影像的监督分类一般包括以下6个步骤,如图1所示:图1监督分类步骤1、类别定义/特征判别根据分类目的、影像数据自身的特征和分类区收集的信息确定分类系统;对影像进行特征判断,评价图像质量,决定是否需要进行影像增强等预处理。
这个过程主要是一个目视查看的过程,为后面样本的选择打下基础。
本例是以ENVI自带Landsat tm5数据Can_tmr.img为数据源,类别分为:林地、草地/灌木、耕地、裸地、沙地、其他六类。
2、样本选择为了建立分类函数,需要对每一类别选取一定数目的样本,在ENVI中是通过感兴趣区(ROIs)来确定,也可以将矢量文件转化为ROIs文件来获得,或者利用终端像元收集器(Endmember Collection)获得。
本例中使用ROIs方法,打开分类图像,在Display->Overlay->Region of Interest,默认ROIs为多边形,按照默认设置在影像上定义训练样本。
如图2所示,设置好颜色和类别名称(支持中文名称)。
[指南]监督分类后处理和精度评价
![[指南]监督分类后处理和精度评价](https://img.taocdn.com/s3/m/412684064531b90d6c85ec3a87c24028915f8505.png)
监督分类后处理和精度评价
1.下面的图像是用监督分类法来分的乌鲁木齐市的遥感图像,我分了四个class,植物,水体,城市,山地等。
我们可以看到很多不应该城市的地方变成城市了,所以我们应该对它进行一些处理。
2.处理过程是:#1Max like窗口的overlay-→classification→出现一个下面的窗口
我把Active class调整山地,然后按下面的步聚来进行处理
#1Interactive class tool 窗口的Edit→Mode: polygon add to class
3.下面的是处理好的图像。
4.接下来可以进行精度评价;classification→post classification→Confusion Matrix→Using Ground Truth ROIs。
然后选择自己分类的图像和原图像进行评价操作。
5.下面的进行精度评价而的出来的结果。
监督分类与非监督分类遥感实习
B、在Overlay下选择Classification,选择之前的非监督分类影像,对照原影像将10种类型进行编号并改名字,改变颜色;进行相同类别的合并:选择Classification中的分类后处理post classification,选择合并同类别Combine Classes,选择之前的非监督分类影像,在输入的文件中依次选择要合并的类,在输出的文件中选择相同的类别,点击Add Combination,所有的类别合并完后点击确定即可。
3.注意:此次实习内容的操作环境为ENVI Classic经典版,上机课上将演示新版本操作。同时此次实习内容为大作业中视频教程中省略的部分。
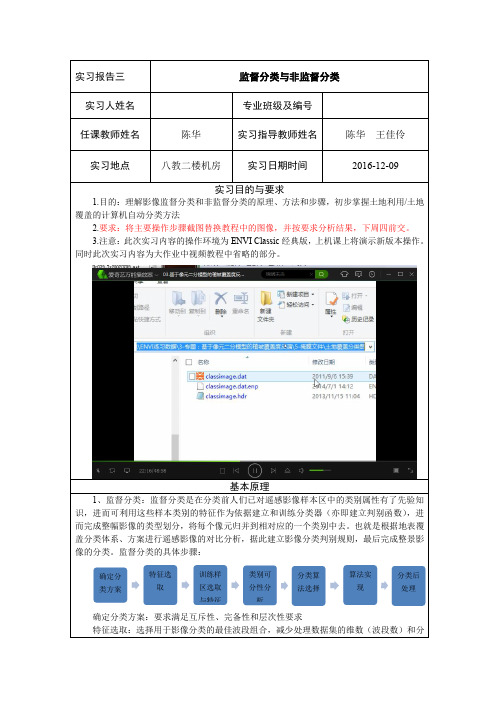
基本原理
1、监督分类:监督分类是在分类前人们已对遥感影像样本区中的类别属性有了先验知识,进而可利用这些样本类别的特征作为依据建立和训练分类器(亦即建立判别函数),进而完成整幅影像的类型划分,将每个像元归并到相对应的一个类别中去。也就是根据地表覆盖分类体系、方案进行遥感影像的对比分析,据此建立影像分类判别规则,最后完成整景影像的分类。监督分类的具体步骤:
3、最大似然分类法是基于概率论中每个像元存在属于所有类别的概率,假设各个类别训练数据都呈现关于类均值矢量和方差参数的n维高斯正态分布,根据像元矢量和上述假设可利用n维正态分布函数计算像元矢量属于各个类别的概率,比较各个类别的概率值,并将像元划归到概率最大的那个类别当中去。
4、分类混淆矩阵(误差矩阵)是指采用随机采样的方法获取一批地面参考验证点的信息作为真值,与遥感分类图进行逐像元比较。然后将结果归纳到混淆矩阵,进而完成混淆矩阵分析。其中结果分为类别精度与总精度,其中类别精度被正确分类的类别像元数占该类别训练样本像元数的百分比,包括生产者精度(制图精度)和用户精度,总精度是指被正确分类的总像元数占评价样本像元总数的百分比。
监督分类的基本原理及算法

精度评价
当检查误差矩阵中各种数据时,其地图用 户看到的是分类图中各个类别的可信度,而 制图分析者关心的是用于产生这张分类图的 方法的好坏。从用户角度,误差矩阵显示的 是用户精度,从制图者角度,其显示的制图 精度。计算俩者时,其主要的区别是精度计 算时的基数。对制图精度,基数是参照图上 各类别的总量;而对用户精度,基数是被评 价图像上的各类别的总数量。
最大似然法(贝叶斯)
最大似然法
为如P(w了果使我i)是用们类最没别大有w似更i然被好法观的,测办必到法须的,预概可先率以求,用出所样P以品(w是频可率i)P以代(X预替|w测,i)的即. 。
品P(的w数i)=目nn,w 且,其n中1+nnw为2+.已..+知n分k=类n 数;或据者中我来们自可第以W令总先体样
i
i
.
w w 用其对数 logP( )+logP(X| ) 来代替。
i
i
最大似然法
T
= P( )P(X |
P E E w w w w E 12
21
E 则表示类别
误分类到2 类别
的2)概dx 率 。T P(
)P(X |
1
)d
1
x
w w 12
E 则表示类别
2误分类到类别
1的概率。
)2
2
2
a 2a
a1
比较D(X ,G1)与D(X ,G2)距离,按距离最近准则判别归类。
(2)如果距离定义采用马氏距离,则
式D(2 中X,,Gi)u1,=u(2X,V-1u,Vi )2T分(V别i )为1(GX1, uGi )2,的i 均1,值2 矢量和协方差阵。
监督分类后处理和精度评价
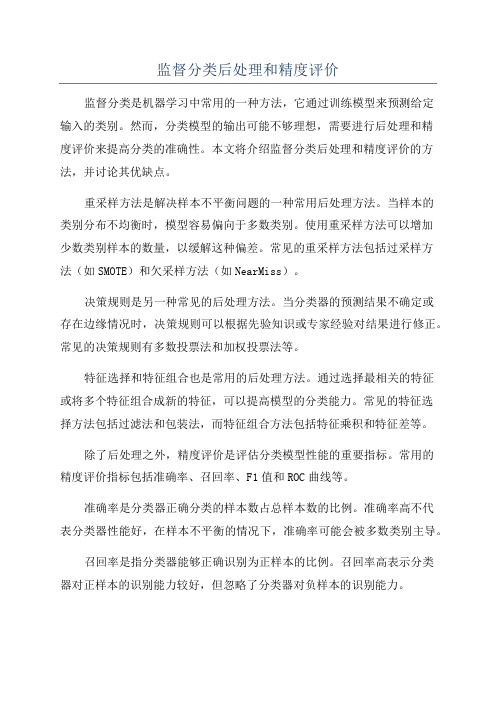
监督分类后处理和精度评价监督分类是机器学习中常用的一种方法,它通过训练模型来预测给定输入的类别。
然而,分类模型的输出可能不够理想,需要进行后处理和精度评价来提高分类的准确性。
本文将介绍监督分类后处理和精度评价的方法,并讨论其优缺点。
重采样方法是解决样本不平衡问题的一种常用后处理方法。
当样本的类别分布不均衡时,模型容易偏向于多数类别。
使用重采样方法可以增加少数类别样本的数量,以缓解这种偏差。
常见的重采样方法包括过采样方法(如SMOTE)和欠采样方法(如NearMiss)。
决策规则是另一种常见的后处理方法。
当分类器的预测结果不确定或存在边缘情况时,决策规则可以根据先验知识或专家经验对结果进行修正。
常见的决策规则有多数投票法和加权投票法等。
特征选择和特征组合也是常用的后处理方法。
通过选择最相关的特征或将多个特征组合成新的特征,可以提高模型的分类能力。
常见的特征选择方法包括过滤法和包装法,而特征组合方法包括特征乘积和特征差等。
除了后处理之外,精度评价是评估分类模型性能的重要指标。
常用的精度评价指标包括准确率、召回率、F1值和ROC曲线等。
准确率是分类器正确分类的样本数占总样本数的比例。
准确率高不代表分类器性能好,在样本不平衡的情况下,准确率可能会被多数类别主导。
召回率是指分类器能够正确识别为正样本的比例。
召回率高表示分类器对正样本的识别能力较好,但忽略了分类器对负样本的识别能力。
F1值综合了准确率和召回率,并平衡了两者之间的关系。
F1值越高,分类器的性能越好。
ROC曲线描述了分类器在不同阈值下的准确率和召回率之间的关系。
一般情况下,ROC曲线越接近左上角,分类器的性能越好。
需要注意的是,不同的应用场景对精度评价指标的要求不同。
因此,根据实际需求选择适合的精度评价指标是十分重要的。
总之,监督分类后处理方法和精度评价指标可以提高分类模型的准确性和可靠性。
通过后处理方法对分类结果进行优化,可以修正分类器的误差;而通过精度评价指标来评估分类器的性能,可以选择最适合的分类器。
监督分类——精选推荐
实验十监督分类实例与练习:某地区的遥感影像监督分类背景:现有某地区TM影像,需要进行土地利用类型划分,并对分类结果进行评价。
本例中使用监督分类的方法,实现土地利用类型的划分。
目的:通过练习,熟练掌握并理解监督分类的方法、评价方法的原理及实现过程,体会在具体应用中的适应性。
监督分类流程图:监督分类过程1 定义分类模板(1)在viewer窗口中选择打开smtm.img,在raster options选择fit to frame(2)单击classifer|classification|signature editor,打开分类模板编辑器(signature editor)(3)在viewer窗口中打开raster|tools,打开raster工具面板(4)选择AOI多边形绘制按钮,进入多边形AOI绘制状态,在图像上选择深蓝色区域,绘制一个多边形AOI,在signature editor窗口,单击按钮,将多边形AOI区域加载到signature editor分类模板属性表中(5)在图像上继续选择深蓝色区域,再绘制一个多边形AOI,在signature editor窗口,单击按钮,将多边形AOI区域加载到signature editor分类模板属性表中(6)用同样的方法加载9个深蓝色多边形AOI(7)在分类模板属性表中,依次单击这些AOI的class#字段下的分类编号(按住shift键),并单击,将所选中的模板合并成一个新的模板,则生成一个新的模板(8)单击其signature name属性进入编辑状态,输入water,单击color属性,选择深蓝色(9)在signature editor菜单条,单击edit|delete,删除合并前的模板(10)在图像上继续选择多个砖红色区域AOI(farmland),赭色区域AOI(forest),绿色区域AOI(grass),浅蓝色区域AOI(resident)(11)单击signatureedit|file|save命令,打开保存对话框,确定是保存所有模板(all),并保存分类模板文件的目录2评价分类模板(1)分类预警评价①选中water类别②在signature editor窗口,选择某类或者某几类模板,单击view|image alarm命令,打开signature alarm对话框③选中indicate overlap复选框,设置同时属于两个及以上的像元叠加预警显示,点击色框设置为黄色④点击edit parallelepiped limit|limit|set,设置计算方法(method):minimum/maximum,并选择使用的模板:current(当前模板)⑤设置完成后,单击ok按钮,返回limits对话框,单击close按钮,返回signature alarm对话框,单击Ok按钮执行分类预警评价,形成预警掩膜,单击close按钮,关闭signature alarm对话框⑥在viewer窗口,选择utility|flick命令,选择auto mode,speed设为600.⑦按照同样的方法分别对forest, farmland, grass类进行预警掩膜,查看准确性(2)可能性评价①选中signature editior属性表中的所有类别②单击evaluate|contingency, 打开contingency matrix对话框,nonparamatric选择feature space, overlap rules选择parametric rule,unclassified rule选择paramatric rule,paramatric rule 选择maximum likehood③设置完成后,点击ok按钮,便显示分类误差矩阵,若误差矩阵大于85%,结果令人满意。
郭平--土地分类精度评价0727
为A类的像元总数的比
分类质量分级表[7]
分类结果叠加验证精度
先对数据进行拉伸
居民点、林地、耕地分类结果叠加对比验证
监督分类精度验证混淆
矩阵表。进行了两次选 择训练样本,用第二次
选择的训练样本作为验
证ROI来验证第一次的 分类结果。验证的综合
精度为93.23%,Kappa
系数为0.92
用第一次选择的训 练样本作为验证ROI 来验证第二次的分 类结果。验证的综 合精度为92.32%, Kappa系数为0.90.
土地利用分类与精度验证
汇报人:郭 平 2015年7月27日
1. 遥感影像分类
遥感图像通过亮度值或像元值的高低差异及空间变
化来表示不同地物的差异,这是区分不同图像地物的物
理基础。遥感图像分类通过计算机手段,利用某种算法 进行分类,获取遥感图像中与实际地物的对应信息,从
而实现遥感图像的分类,一般分类方法有监督分类与非
分析和图形识别等。
非监督分类步骤
ENVI中非监督分类方法有K-means均值算法、迭代自 组织的数据分析法(ISODATA)。 非监督分类大体上判断主要地物的类别数量。一般 监督分类设置分类数目比最终分类数量要多2-3倍为宜, 这样有助于提高分类精度。
选用ISODATA方法的非监督分类结果
合并为5类后,进行分类后处理的影像
[6]DENG Sheng-lu,QI Hao-wen. A Survey of image classification methods and techniques for
improving classification performance [J].International Journal of Remote Sensing,2007,28(5):823-870. [7]刘旭拢,何春阳,潘耀忠,杨明川,张锦水. 遥感图像分类精度的点、群样本检验与评估[J].
PIE-Basic监督分类和分类后处理

PIE-Basic监督分类和分类后处理1.功能概述1.1 图像分类功能概述在遥感技术的应⽤中,对资源分布、⾃然灾害、区域环境等的监测和分析依附于遥感图像分类。
⽽遥感图像分类是进⾏图像信息提取的有效⼿段。
随着遥感技术的的不断改进,各领域对遥感图像分类⽅法的要求越来越⾼,主要表现在以下⼏个⽅⾯:分类结果的精确性:各领域对分类结果的精度要求越来越⾼。
分类速度的时效性:随着近年来遥感数据的快速增长,项⽬中往往需要进⾏海量遥感数据的快速处理。
遥感图像分类属于⼤规模机器学习,数据量⼤导致运算量很⼤。
另外,⼈们在追求⾼精度的同时,计算复杂度也随之增加,这对遥感应⽤的时效性提出了很⾼的要求。
分类⽅法使⽤的便捷性:解译⼈员对分类算法的分类⾏为难以理解,⽆法准确了解参数设置与分类结果之间的关联性,需要将分类器的⾏为转化为易于理解的符号规则,把遥感影像的内在特征和规律显⽰出来。
1.2 监督分类功能特点遥感图像分类实现的主要⽅法包括监督分类和⾮监督分类。
其中监督分类作为⼀种先学习后分类的机器学习策略,利⽤像元光谱特征的相似性进⾏分类,具有较⾼的分类精度,是对遥感图像进⾏信息提取的主要⼿段。
监督分类功能特点包括:充分利⽤分类地区的先验知识,有⽬的的选择分类类别;通过对样本的反复检验和训练,提⾼分类成果的可靠性,出现严重错误的⼏率较低;分类速度相对较快,分类精度较⾼;⼈为主观性⽐较强,获取合格的样本⽐较费时费⼒。
分类⽅法优点缺点适⽤范围监督分类精确度⾼,准确性好,与实际类别吻合较好⼯作量⼤有先验知识时使⽤该⽅法⾮监督分类⼯作量⼩易于实现分类结果与实际类别相差较⼤,准确性差在没有类别先验知识时使⽤该⽅法在实际应⽤中监督分类精度要⾼于⾮监督分类,更适⽤于遥感图像的精细化分类,⾮监督分类可应⽤于分类精细化程度不⾼的快速分类的场景中。
1.3 监督分类应⽤在⽬前的遥感图像分类的应⽤中,传统模式识别的监督分类⽅法,诸如最⼩距离、最⼤似然法等,能够满⾜应⽤⼈员对⼤区域遥感影像的快速分类处理需求。
[转载]监督分类和非监督分类
![[转载]监督分类和非监督分类](https://img.taocdn.com/s3/m/b84adcd49fc3d5bbfd0a79563c1ec5da50e2d630.png)
[转载]监督分类和⾮监督分类原⽂地址:监督分类和⾮监督分类作者:维度空间实习序号及题⽬实习⼋、监督分类和⾮监督分类实习⼈姓名xuanfengling专业班级及编号地信0834任课教师姓名实习指导教师姓名实习地点榆中校区实验楼A209实习⽇期时间2010年12⽉16⽇实习⽬的理解影像监督分类和⾮监督分类的原理、⽅法和步骤,初步掌握⼟地覆盖的计算机⾃动分类⽅法实习内容1、通过遥感影像解译确定的⼟地覆盖分类类型、⾊调和编码:编码地物名称编码地物名称11⽔稻⽥ paddy land51河流 stream12⽔浇地 irrigated land52⽔库、坑塘 reservoir or pond20园地 garden61城镇及农村居民地 town or village30草地 grassland62⼯业区 industrial31林地 forest71沙漠 sandy desert32防护林 prevention desert72砾漠 gravel desert33幼林地 young forest73裸地及盐碱地 barren land4公路/铁路 road or railway53设施农⽤地 facility agricultural land 2、按照监督分类的步骤,在影像上找出对应各个⼟地利⽤/覆盖类型的图斑,建⽴训练区,给出各个类别的特征统计表3、采⽤4种可分性度量⽅法(欧⽒距离、分散度、变换散度、J-M距离)给出可分性矩阵,判断类型之间的可分性,要求将可分性矩阵转换为⽂本⽂件格式并以表格形式插⼊实习报告中,注意在输出时选取CellArray。
4、监督分类:利⽤最⼤似然法完成分类;5、分类精度评价,从随机采集100~200个样本点,进⾏分类精度评价,得到分类混淆矩阵,计算Kappa系数,并对结果进⾏解释。
6、⽣成特征空间影像和监督分类的结果专题特征空间影像,7、⾮监督分类:预先假定地表覆盖类型为30类,叠代次数选为20,由系统完成⾮监督分类;参照监督分类的结果对分类结果进⾏分析,修改类别属性值,进⽽确定新的⼟地利⽤/覆盖分类⽅案。
分类精度评价范文
分类精度评价范文分类精度评价是对分类模型的性能进行评估的一种方法。
分类问题是机器学习中的一种常见任务,其目标是将输入数据划分为预定义的类别。
分类模型通过学习训练数据的模式和特征来对新数据进行分类预测。
分类精度评价可以帮助我们了解分类模型的性能,判断其是否能够准确地预测新数据的类别。
1. 准确率(Accuracy):准确率是分类模型预测正确的样本数量与总样本数量之比。
准确率是最常用的分类精度评价指标之一,并且易于理解和解释。
然而,当类别不平衡或存在大量严重错误分类的情况下,准确率可能会忽略一些关键的错误。
2. 精确率(Precision):精确率是分类模型预测为正例的样本中真正正例的比例。
精确率可以帮助我们评估模型的分类错误情况,特别是假阳性的情况。
例如,在医学诊断中,假阳性的情况可能会导致错误的治疗决策。
3. 召回率(Recall):召回率是分类模型预测为正例的样本中真正正例的比例。
召回率可以帮助我们评估模型对正例样本的识别能力,特别是假阴性的情况。
例如,在垃圾邮件过滤中,假阴性的情况可能导致重要的邮件被错误分类为垃圾邮件。
4. F1-score:F1-score是精确率和召回率的调和均值,用于综合评估分类模型的性能。
F1-score可以帮助我们平衡分类模型在精确率和召回率之间的表现。
5. ROC曲线与AUC值:ROC曲线是以假阳性率(False Positive Rate)为横轴,真阳性率(True Positive Rate)为纵轴的曲线。
ROC曲线可以帮助我们评估分类模型在不同分类阈值下的性能表现。
AUC(Area Under Curve)值是ROC曲线下的面积,它可以用来综合评估分类模型的性能。
6. 混淆矩阵(Confusion Matrix):混淆矩阵是一个二维表格,用于可视化分类模型的预测结果与真实结果之间的差异。
混淆矩阵可以帮助我们更直观地了解分类模型在各个类别上的表现。
评价分类模型的分类精度时,我们通常需要考虑所处理的具体问题。
特征提取灰度共生矩阵(GLCM)

• 一幅图像的灰度级数一般是256,这样计算的灰度 共生矩阵太大。为了解决这一问题,在求灰度共 生矩阵之前,常压缩为16级。
一、遥感图像分类概述
基于灰度共生矩阵(GLCM)的特征
二、监督分类
3.最小距离分类法(Minimum distance classifier)
• 一种相对简化了的分类方法。 • 假设N维空间存在M个类别,某一像元距哪类距离最小,
则判归该类。 • 通过训练样本事先确定类别数、类别中心,然后进行分
类。分类的精度取决于训练样本的准确与否。
25
二、监督分类
前提是认为每一类的概率密度分布都是正态的,由每一类的均值 向量和协方差矩阵可以得到多维特征空间的概率密度分布函数。
根据样本统计,可计算特征向量X在第i类的概率分布密度为:
p X | wi
1
n
2 2 |
i
1
|2
exp
1 2
X
Mi T i 1 X Mi
a.数字特征的建立——对象的数学描述(形状、颜色) b.提取一组训练(已知)样本——先验知识 c.分类器建立——判决函数 d.对未知模式进行分类——识别
数学 模式
一、遥感图像分类概述
3.遥感图像计算机分类的基本原理
基于遥感图像中反映 的同类地物的特征相 似性和异类地物的特 征差异性。通过分析 特征空间中点群的位 置分布中心、分布规 律等,确定点群的界 限,完成分类。
一、遥感图像分类概述
3.遥感图像计算机分类的基本原理
分类过程
分类预处理:大气校正、几何校正与配准 特征选择(提取) 分类(监督分类训练区的选择) 分类后处理,包括精度评价 专题图制作
监督分类——精选推荐

监督分类(Supervised Classification)监督分类比非监督分类更多地要用户来控制,常用于对研究区域比较了解的情况。
在监督分类过程中,首先选择可以识别或者借助于其他信息可以断定其类型的像元建立模板,然后基于该模板使计算机系统自动识别具有相同特性的像元。
对分类结果进行评价后再对模板进行修改,多次反复后建立一个比较准确的模板,并在此基础上最终进行分类。
监督分类一般要经过以下几个步骤:建立模板(训练样本)、评价模板、确定初步分类结果、检验分类结果、分类后处理、分类特征统计、栅格矢量转换。
1.建立模板(训练样本、定义分类模板Define Signatures)ERDAS IMAGINE的监督分类是基于分类模板(Classification Signature)来进行的,而分类模板的生成、管理、评价和编辑等功能是由分类模板编辑器(Signature Editor)来负责的。
在分类模板编辑器中生成分类模板的基础是原图像和(或)其特征空间图像。
第一步:显示需要分类的图像在视窗Viewer中显示图像aaa.img第二步:打开分类模板编辑器(两种方式)①ERDAS图标面板菜单条:Main →Image Classification → Classification菜单→ Signature Editor菜单项→ Signature Editor对话框②ERDAS图标面板工具条:点击Classifier图标→Classification菜单→Signature Editor菜单项→ Signature Editor对话框从上图中可以看到分类模板编辑器由菜单条、工具条和分类模板属性表(CellArray)三大部分组成。
第三步:调整分类属性字段Signature Editor对话框中的分类属性表中有很多字段,分类名称(将带入分类图像)分类颜色(将带入分类图像)分类代码(只能用正整数)分类过程中的判断顺序分类样区中的像元个数分类可能性权重(用于分类判断)不同字段对于建立分类模板的作用或意义是不同的,为了突出作用比较大的字段,需要进行必要的调整。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[优质文档]监督分类后处理和精度评价地理科学与旅游学院
(第三次作业)
遥感影像分类后处理和精度评价
(新疆策勒县的遥感图像LE71460342000218SGS00)
姓名:
学号:
序号
1.下面的图像是用监督分类法来分的策勒县的遥感图像,我分了四个class,植物,水体,城市,裸地等。
我们可以看到很多不应该城市的地方变成城市了,所以我们应该对它进行一些处理。
2.处理过程是:#1Max like窗口的overlay-,classification,出现一个下面的窗口
\ 我把Active class调整城市,然后按下面的步聚来进行处理
#1Interactive class tool 窗口的Edit,Mode: polygon delete form class
3.下面的是后处理的图像。
4.接下来可以进行精度评价;在ENVI中,选择主菜单classification,post
classification,Confusion Matrix,Using Ground Truth ROIs。
然后选择自己分类的图像和原图
像进行评价操作。
用混合矩阵,选出来对话框:
选择分类图像,点OK
左边是印证样本,右边是选择样本,匹配分类后点OK,
点OK出来下面的矩阵表。