分类精度的评价
遥感影像解译-分类后处理及精度评价、分类新方法

三、分类新方法
• 随着模式识别与机器学习技术的不断发展,将先进的机器
学习技术应用到遥感影像分类中,并充分考虑影像本身的光
谱信息、空间信息、时间序列信息以及各类地理辅助信息可
以大大提高遥感影像分类的精度。
• 分类新方法
- 半监督分类;
- 面向对象分类;
- 分类器集成
- ……
26
1 半监督分类
• 机器学习 (Machine Learning)模式: - 监督学习:仅仅利用已标注类别的样本进行训练以确定 分类器; - 非监督学习:只利用未标注类别的数据进行聚类分析; - 半监督学习:利用已标注类别的样本+未标注样本来确 定分类器。
3×3窗口分析结果
(4) 分类后处理-平滑处理
• 针对问题 分类结果斑点噪声严重
• 解决方法: a. MRF随机场建模 b. Majority Voting 方法
原始多光谱遥感影像与地面真实值
(1) IKONOS 多光谱影像
原始多光谱遥感影像与地面真实值
(1) IKONOS 多光谱影像
(2) 地表真实值
25446 Aprod 52987 48.02% 1 Eo
(e) 用户精度(User’s Accuracy)
• 用户精度(User’s Accuracy): - 影像类中,某类像元被正确分类为该类的概率,利用 混淆矩阵的行来计算。如水的用户精度:
Auser
9180 56104
16.36%
a. SVM vs 高斯混合模型+MRF
(3) SVM 水体提取结果
a. SVM vs 高斯混合模型+MRF
(3) SVM 水体提取结果
(4) 高斯混合模型+MRF方法
遥感数据分类精度评价的方法和指标
遥感数据分类精度评价的方法和指标遥感技术在地质、农业、环境等领域的应用越来越广泛,其分类精度评价成为评估遥感数据可靠性的重要手段。
本文将介绍遥感数据分类精度评价的方法和指标,并探讨在应用中的局限性和改进方向。
一、方法1. 精确性评价法精确性评价法通过对比遥感分类结果和真实地面样本数据,计算分类的准确率、误差矩阵、Kappa系数等指标。
准确率指标能反映分类精度的整体水平,误差矩阵则可以分析各类别之间的混淆程度,Kappa系数可以衡量分类结果与随机分类的一致性。
这些指标可以从不同角度评价分类的精确性,但需要借助真实样本数据,存在采样不均匀和标注误差等问题。
2. 信息熵评价法信息熵评价法通过信息熵和互信息等信息论指标,衡量分类结果中包含的信息量和类别关联性。
信息熵越小,代表分类结果中包含的信息越少,分类精确度越高;互信息可以衡量分类结果与真实结果的相关程度。
这些指标基于信息论的原理,可以有效评价分类的精度,但对于数据量较大的情况,计算量较大。
3. 混淆矩阵评价法混淆矩阵评价法主要通过构建混淆矩阵,分析分类结果中不同类别之间的混淆情况。
混淆矩阵由真实类别和分类类别组成,可以直观地展示分类结果的正确性和误判情况。
通过混淆矩阵,可以分析分类结果中各类别之间的相似度和差异性,为分类模型的改进提供参考。
二、指标1. 总体精度总体精度是评价分类结果的整体正确率,通过计算分类正确的像素数量与总像素数量的比例得出。
高总体精度代表分类结果准确度高,但并不能说明各类别的精确性。
2. 用户精度和生产者精度用户精度和生产者精度是评价分类结果各类别准确性的重要指标。
用户精度是指分类结果为某一特定类别的样本中,实际属于该类别的比例。
生产者精度是指实际属于某一特定类别的样本中,被正确分类为该类别的比例。
用户精度主要关注分类结果对应每个类别的准确性,生产者精度主要关注每个类别被正确分类的概率。
3. Kappa系数Kappa系数是衡量分类结果与随机分类结果一致性的指标。
分类精度评价
遥感影像分类精度评价遥感影像分类精度评价(2009-11-20 14:20:57)在ENVI中,选择主菜单->Classification->Post Classification->ConfusionMatrix->Using Ground Truth ROIs。
将分类结果和ROI输入,软件会根据区域自动匹配,如不正确可以手动更改。
点击ok后选择报表的表示方法(像素和百分比),就可以得到精度报表。
对分类结果进行评价,确定分类的精度和可靠性。
有两种方式用于精度验证:一是混淆矩阵,二是ROC曲线,比较常用的为混淆矩阵,ROC曲线可以用图形的方式表达分类精度,比较形象。
对一帧遥感影像进行专题分类后需要进行分类精度的评价,而进行评价精度的因子有混淆矩阵、总体分类精度、Kappa系数、错分误差、漏分误差、每一类的制图精度和拥护精度。
1、混淆矩阵(Confusion Matrix): 主要用于比较分类结果和地表真实信息,可以把分类结果的精度显示在一个混淆矩阵里面。
混淆矩阵是通过将每个地表真实像元的位置和分类与分类图象中的相应位置和分类像比较计算的。
混淆矩阵的每一列代表了一个地表真实分类,每一列中的数值等于地表真实像元在分类图象中对应于相应类别的数量,有像元数和百分比表示两种。
2、总体分类精度(Overall Accuracy): 等于被正确分类的像元总和除以总像元数,地表真实图像或地表真实感兴趣区限定了像元的真实分类。
被正确分类的像元沿着混淆矩阵的对角线分布,它显示出被分类到正确地表真实分类中的像元数。
像元总数等于所有地表真实分类中的像元总和。
3、Kappa系数:是另外一种计算分类精度的方法。
它是通过把所有地表真实分类中的像元总数(N)乘以混淆矩阵对角线(Xkk)的和,再减去某一类中地表真实像元总数与该类中被分类像元总数之积对所有类别求和的结果,再除以总像元数的平方差减去某一类中地表真实像元总数与该类中被分类像元总数之积对所有类别求和的结果所得到的。
遥感影像分类精度评价教学内容
价
遥感影像分类精度评价
在ENVI中,选择主菜单->Classification->Post Classification->Confusion Matrix- >Using Ground Truth ROIs将分类结果和ROI输入,软件会根据区域自动匹配, 如不正确可以手动更改。点击ok后选择报表的表示方法(像素和百分比),就 可以得到精度报表。
6、制图精度:指假定地表真实为A类,分类器能将一幅图像的像元归为A
的概率
7、用户精度:指假定分类器将像元归到A类时,相应的地表真实类别是A的概率。混淆矩阵中的几项价指标,如下:总体分类精度
等于被正确分类的像元总和除以总像元数。被正确分类的像元数目沿着混淆矩 阵的对角线分布,总像元数等于所有真实参考源的像元总数,如本次精度分类 精度表中的Overall Accuracy= (1849/2346)
面。本例中,林地有419个真实参考像元,其中正确分类265,12个是其他类
别错分为林地(混淆矩阵中林地一行其他类的总和),那么其错分误差为
12/419=2.9%。
漏分误差
指本身属于地表真实分类,当没有被分类器分到相应类别中的像元数。如在本 例中的耕地类,有真实参考像元465个,其中462个正确分类,其余3个被错 分为其余类(混淆矩阵中耕地类中一列里其他类的总和),漏分误差为
类的制图精度和拥护精度
1混淆矩阵(Confusion Matrix):主要用于比较分类结果和地表真实信息, 可以把分类结果的精度显示在一个混淆矩阵里面。混淆矩阵是通过将每个地表 真实像元的位置和分类与分类图象中的相应位置和分类像比较计算的。混淆矩 阵的每一列代表了一个地表真实分类,每一列中的数值等于地表真实像元在分 类图象中对应于相应类别的数量,有像元数和百分比表示两种。
遥感图像分类精度之评价指标:混淆矩阵、总体精度、错分误差、漏分误差、Kappa系数
混淆矩阵遥感影像分类就是一个对给定的遥感影像所包含的所有像元的地表属性进行识别归类的过程;目的是在属性识别归类的基础上获取研究区域内各个地物类型的分布状况及面积。
对遥感影像分类结果进行评估就是一个通过比较检验样本与分类结果的符合程度来确定分类准确度的过程。
精度与准确度“精度”,是对同一批样本采用相同方法进行多次的测定,比较各次的测定值之间彼此接近的程度。
如果每个测定值彼此之间越接近,则精度越高,体现的是测定结果的重现性。
例如,测量一段线段的长度,每次都采用相同的方法——用直尺进行测量,经过多次测量之后我们发现,每次测量的结果都是1cm,这就说明我们以直尺进行测量这种方法的精度很高。
准确度则不然,是指测量结果与真实值相符合的程度。
还是以测量线段长度举例,真实的线段长度为1.00001cm,测量结果为1cm,这就说明测量方法的准确度还是很高的。
两者之间的关系:准确度高,意味着精度也很高,但是精度高却不意味着准确度高。
假设第一次的测量结果为1.5cm,第二次为1.52cm,第三次为1.49cm,表面上我们的精度很高,但实际上线段的长度只有1.00001cm,准确度并不高。
评估指标1总体分类精度(Overall Accuracy)指针对每一个随机样本,所分类的结果与检验数据类型相一致的概率,也就是被正确分类的像元总和除以总像元数。
即混淆矩阵中对角线上的像元数总和除以总像元数目。
2生产者精度生产者精度,也称制图精度,指相对于检验数据中的任意一个随机样本,分类图上相同位置的分类结果与其相一致的概率。
即混淆矩阵中,分类器将整幅影像正确分类为A的像元数(对角线上A类的值)与真实情况下A的像元数(真实情况A的像元数总和)之比。
3用户精度指在分类结果中任取一随机样本,其所具有的类型与地表真实情况相符合的条件概率。
即混淆矩阵中,分类器将整幅影像正确分类为A的像元数和(对角线上A类的值)与分类器分出的所有A类像元数(预测值为A的像元数总和)之比。
测绘技术如何进行遥感影像分类精度评定
测绘技术如何进行遥感影像分类精度评定测绘技术在现代科技发展中扮演着至关重要的角色。
遥感影像分类精度评定是测绘技术中的一个重要环节。
本文将从测绘技术的发展背景、遥感影像分类精度评定的基本概念和方法、实际应用案例等方面进行论述。
一、测绘技术的发展背景随着科技进步和信息化时代的到来,人们对地球及其资源的认知和需求也逐渐提升。
测绘技术应运而生,成为人们获取地理信息的重要手段。
遥感影像作为测绘技术的重要组成部分,以其高效、全面的特点被广泛应用。
二、遥感影像分类精度评定的基本概念和方法(一)基本概念遥感影像分类精度评定是指通过一系列定量和定性的方法,对遥感影像分类的准确程度进行评估和衡量。
分类精度评定结果直接反映了遥感影像分类方法和技术的可行性和准确性。
(二)方法和指标1.对比法:将遥感影像分类结果与实地调查结果进行对比,通过判断分类结果中的错误分类和遗漏分类的程度,评估分类精度。
2.混淆矩阵法:通过构建混淆矩阵,统计分类结果中各类别的正确分类和错误分类的数量,从而计算出分类精度指标,如准确性、偏差、精度等。
3.Kappa系数法:Kappa系数是一种常用的分类精度评价指标,用于衡量分类结果与实地调查结果之间的一致性程度。
Kappa系数取值范围为[-1, 1],值越接近1表示分类结果与实地调查结果一致性越高。
三、实际应用案例(一)土地利用分类精度评定遥感影像在土地利用监测中具有广泛的应用。
通过对遥感影像进行分类精度评定可以更好地了解土地利用情况,为土地资源管理和规划提供数据支持。
例如,通过对遥感影像分类结果与实地调查结果进行对比,可以评估城市绿地覆盖率的准确性,并据此制定相应的城市绿化计划。
(二)植被分类精度评定植被分类是遥感影像分类的重要应用之一。
通过对植被分类精度进行评定,可以了解植被分布情况以及植被类型的变化趋势,为植被保护和生态恢复提供科学依据。
例如,在森林资源调查中,通过对遥感影像分类结果的准确性进行评估,可以计算出森林面积、林种组成等重要指标,为森林资源的管理提供数据支持。
[整理版]遥感影像分类精度评价
![[整理版]遥感影像分类精度评价](https://img.taocdn.com/s3/m/f45d71ed760bf78a6529647d27284b73f24236de.png)
遥感影像分类精度评价在ENVI中,选择主菜单->Classification->Post Classification->Confusion Matrix->Using Ground Truth ROIs。
将分类结果和ROI输入,软件会根据区域自动匹配,如不正确可以手动更改。
点击ok后选择报表的表示方法(像素和百分比),就可以得到精度报表。
对分类结果进行评价,确定分类的精度和可靠性。
有两种方式用于精度验证:一是混淆矩阵,二是ROC曲线,比较常用的为混淆矩阵,ROC曲线可以用图形的方式表达分类精度,比较形象。
对一帧遥感影像进行专题分类后需要进行分类精度的评价,而进行评价精度的因子有混淆矩阵、总体分类精度、Kappa系数、错分误差、漏分误差、每一类的制图精度和拥护精度。
1、混淆矩阵(Confusion Matrix): 主要用于比较分类结果和地表真实信息,可以把分类结果的精度显示在一个混淆矩阵里面。
混淆矩阵是通过将每个地表真实像元的位置和分类与分类图象中的相应位置和分类像比较计算的。
混淆矩阵的每一列代表了一个地表真实分类,每一列中的数值等于地表真实像元在分类图象中对应于相应类别的数量,有像元数和百分比表示两种。
2、总体分类精度(Overall Accuracy): 等于被正确分类的像元总和除以总像元数,地表真实图像或地表真实感兴趣区限定了像元的真实分类。
被正确分类的像元沿着混淆矩阵的对角线分布,它显示出被分类到正确地表真实分类中的像元数。
像元总数等于所有地表真实分类中的像元总和。
3、Kappa系数:是另外一种计算分类精度的方法。
它是通过把所有地表真实分类中的像元总数(N)乘以混淆矩阵对角线(Xkk)的和,再减去某一类中地表真实像元总数与该类中被分类像元总数之积对所有类别求和的结果,再除以总像元数的平方差减去某一类中地表真实像元总数与该类中被分类像元总数之积对所有类别求和的结果所得到的。
郭平--土地分类精度评价0727
为A类的像元总数的比
分类质量分级表[7]
分类结果叠加验证精度
先对数据进行拉伸
居民点、林地、耕地分类结果叠加对比验证
监督分类精度验证混淆
矩阵表。进行了两次选 择训练样本,用第二次
选择的训练样本作为验
证ROI来验证第一次的 分类结果。验证的综合
精度为93.23%,Kappa
系数为0.92
用第一次选择的训 练样本作为验证ROI 来验证第二次的分 类结果。验证的综 合精度为92.32%, Kappa系数为0.90.
土地利用分类与精度验证
汇报人:郭 平 2015年7月27日
1. 遥感影像分类
遥感图像通过亮度值或像元值的高低差异及空间变
化来表示不同地物的差异,这是区分不同图像地物的物
理基础。遥感图像分类通过计算机手段,利用某种算法 进行分类,获取遥感图像中与实际地物的对应信息,从
而实现遥感图像的分类,一般分类方法有监督分类与非
分析和图形识别等。
非监督分类步骤
ENVI中非监督分类方法有K-means均值算法、迭代自 组织的数据分析法(ISODATA)。 非监督分类大体上判断主要地物的类别数量。一般 监督分类设置分类数目比最终分类数量要多2-3倍为宜, 这样有助于提高分类精度。
选用ISODATA方法的非监督分类结果
合并为5类后,进行分类后处理的影像
[6]DENG Sheng-lu,QI Hao-wen. A Survey of image classification methods and techniques for
improving classification performance [J].International Journal of Remote Sensing,2007,28(5):823-870. [7]刘旭拢,何春阳,潘耀忠,杨明川,张锦水. 遥感图像分类精度的点、群样本检验与评估[J].
遥感影像分类精度评价
遥感影像分类精度评价遥感影像分类是利用遥感技术获取的遥感影像数据进行地物分类的过程。
精度评价是评估分类结果与实际地物分布之间的一致性程度的过程。
在遥感影像分类精度评价中,常用的评价方法包括混淆矩阵法、Kappa系数、总体精度和准确率以及召回率等指标。
下面将对这些评价方法进行详细介绍。
一、混淆矩阵法混淆矩阵法是一种常用的分类精度评价方法,通过统计分类结果和实际地物分布之间的一致性进行评估。
混淆矩阵是一个N*N的矩阵,其中N 表示分类的类别数。
矩阵的行和列分别表示实际类别和分类类别,每个元素表示实际类别在分类结果中的分布情况。
通过计算混淆矩阵可以得出分类的总体精度、准确率、召回率等指标。
二、Kappa系数Kappa系数是一种常用的评估分类结果一致性的统计量。
Kappa系数取值范围为[-1,1],其中-1表示完全不一致,0表示随机一致,1表示完全一致。
Kappa系数越大表示分类结果的一致性越好。
计算Kappa系数需要利用混淆矩阵中的各项数据进行计算。
三、总体精度和准确率以及召回率总体精度是指分类结果正确的分类数占总分类数的比例,是衡量分类正确率的重要指标。
总体精度的计算公式为:总体精度=(分类正确的样本数/总样本数)*100%。
准确率是指分类结果中真阳性(TP,分类正确的正例)和真阴性(TN,分类正确的负例)的比例,计算公式为:准确率=TP/(TP+FP)。
召回率是指真阳性比真阳性和假阴性(FN,分类错误的负例)的比例,计算公式为:召回率=TP/(TP+FN)。
总体精度、准确率和召回率都是衡量分类精度的重要指标,可以综合评价分类结果的正确性和完整性。
在进行遥感影像分类精度评价时,应根据具体的分类目的和要求选择合适的评价方法。
针对不同的评价指标,可以采取不同的统计方法进行计算,以达到准确评估分类结果和精度的目的。
综上所述,遥感影像分类精度评价是评估分类结果与实际地物分布之间的一致性程度的过程,常用的评价方法包括混淆矩阵法、Kappa系数、总体精度和准确率以及召回率。
图像分类和融合中精度评价指标
图像分类和融合中精度评价指标1.图像分类中精度评价的几个指标对分类结果进行评价,确定分类的精度和可靠性,有两种方式用于精度验证:一是混淆矩阵,二是ROC曲线。
比较常用的为混淆矩阵,ROC曲线可以用图形的方式表达分类精度,比较形象。
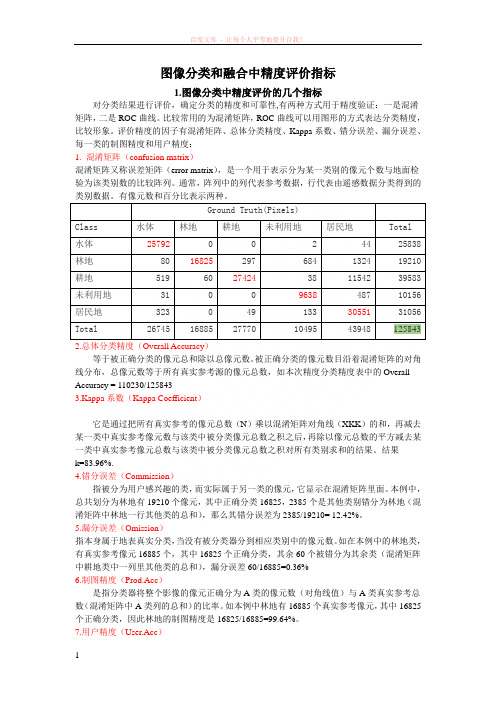
评价精度的因子有混淆矩阵、总体分类精度、Kappa系数、错分误差、漏分误差、每一类的制图精度和用户精度:1. 混淆矩阵(confusion matrix)混淆矩阵又称误差矩阵(error matrix),是一个用于表示分为某一类别的像元个数与地面检验为该类别数的比较阵列。
通常,阵列中的列代表参考数据,行代表由遥感数据分类得到的类别数据。
有像元数和百分比表示两种。
Ground Truth(Pixels)Class水体林地耕地未利用地居民地Total水体257920024425838林地8016825297684132419210耕地5196027424381154239583未利用地3100963848710156居民地3230491333055131056 Total26745168852777010495439481258432.总体分类精度(Overall Accuracy)等于被正确分类的像元总和除以总像元数。
被正确分类的像元数目沿着混淆矩阵的对角线分布,总像元数等于所有真实参考源的像元总数,如本次精度分类精度表中的Overall Accuracy = 110230/1258433.Kappa系数(Kappa Coefficient)它是通过把所有真实参考的像元总数(N)乘以混淆矩阵对角线(XKK)的和,再减去某一类中真实参考像元数与该类中被分类像元总数之积之后,再除以像元总数的平方减去某一类中真实参考像元总数与该类中被分类像元总数之积对所有类别求和的结果。
结果k=83.96%.4.错分误差(Commission)指被分为用户感兴趣的类,而实际属于另一类的像元,它显示在混淆矩阵里面。
分类精度评价
分类精度评价主要有两种方式:混合矩阵、ROC曲线。
其中混合矩阵是以数据的形式表示分类的精度,而ROC曲线的用线条来表示精度。
这里主要整理一下混合矩阵中的两种方式首先对被分类的原图像再次进行一次ROI的选择,这次的感兴趣区的选择尽量只选择纯净像元,这样使得分类的精度较高,或者在跟原图像同一区域范围的高精度图像上进行感兴趣区的选取。
这次的感兴趣定义为<检验roi.>,并且在次基础上进行分类,定义为<检验_ml3.tif>。
然后开始进行分类精度评价:1、Using Ground Truth Image第一步:File →Open image file(打开原始图像)第二步:Available Band List窗口中的File(打开作为检验标准用的分类结果图<检验_ml3.tif>)Available Band List窗口中的File(打开分类结果图<ml3.tif>)注:顺序可以颠倒。
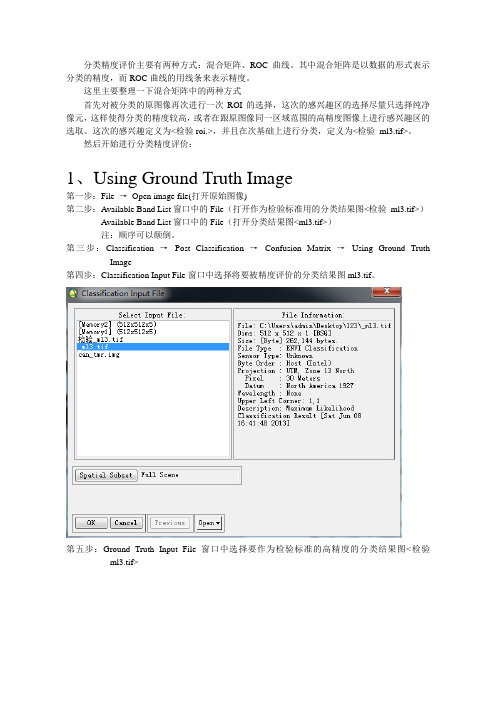
第三步:Classification →Post Classification →Confusion Matrix →Using Ground Truth Image第四步:Classification Input File窗口中选择将要被精度评价的分类结果图ml3.tif。
第五步:Ground Truth Input File窗口中选择要作为检验标准的高精度的分类结果图<检验_ml3.tif>第六步:在Match Classes Parameters窗口中,如果两套分类中的各类名称一样,则会自动匹配,若不一致,可手动匹配,然后点Add Combination第七步:Confusion Matrix Paeameter 窗口中选择精度评价的结果表示形式以及存储在哪个文件中第八步:出结果。
2、Using Ground Truth ROIs第一步:File →Open image file(打开原始图像)第二步:Available Band List窗口中的File(打开分类结果图<ml3.tif>)第三步:Available Band List窗口中的File(打开作为检验标准用的分类结果图<检验_ml3.tif>)注:这个分类结果图在Gray Sxale中是彩色的注:第二步与第三步的顺序不可以乱,必须在作为检验标准的分类结果图被打开的前提下才可以进行Using Ground Truth ROIs精度评价。
envi监督分类精度评价步骤
envi监督分类精度评价步骤Envi监督分类精度评价步骤引言:Envi是一种功能强大的遥感图像处理软件,可用于监督分类,即通过训练样本来识别遥感图像中的不同地物类型。
在进行监督分类时,评价分类结果的精度是十分重要的。
本文将介绍Envi监督分类精度评价的具体步骤。
一、准备数据需要准备用于监督分类的遥感图像数据和相应的参考数据。
遥感图像数据可以是多光谱、全色或高光谱图像等,参考数据通常是由专业人员通过野外调查或其他手段获取的地面真实分类信息。
二、创建训练样本在Envi中,需要利用参考数据来创建训练样本。
训练样本是用来训练监督分类算法的关键数据,它包含了不同地物类型的典型特征。
通过在遥感图像上手动绘制多边形区域,将其与参考数据中的对应类别相关联,即可创建训练样本。
三、执行监督分类在创建完训练样本后,可以执行监督分类算法。
Envi提供了多种监督分类算法,包括最大似然法、支持向量机、随机森林等。
根据实际情况选择适合的算法,并将其应用于遥感图像数据上。
四、生成分类结果执行监督分类算法后,Envi将生成分类结果图像。
该图像将遥感图像中的每个像素分配到不同的地物类型,从而形成一个具有不同颜色编码的分类图像。
五、验证分类结果验证分类结果的精度是评价监督分类算法好坏的重要指标之一。
Envi提供了多种评价指标,包括混淆矩阵、生产者精度、用户精度、Kappa系数等。
通过与参考数据进行比较,可以计算出分类结果的各项指标,并对分类结果进行验证。
六、可视化分类结果Envi还提供了一系列可视化工具,可以将分类结果与原始遥感图像进行叠加显示,以便更直观地观察分类效果。
可以通过调整透明度、颜色编码等参数来优化可视化效果,并对分类结果进行进一步的分析和解读。
七、优化分类结果根据验证结果和可视化分析,如果发现分类结果存在较大误差或不准确的地方,可以尝试调整训练样本、选择不同的分类算法或调整算法参数等方式来优化分类结果。
重复执行监督分类和验证的过程,直到获得满意的分类结果。
遥感影像分类精度评价方法研究
遥感影像分类精度评价方法研究遥感影像分类是利用遥感技术获取的多光谱数据对地表进行分类和识别的过程。
在进行遥感影像分类时,精度评价是一个重要的步骤,用于评估分类结果的准确性和可靠性。
本文将探讨遥感影像分类精度评价的方法和常用的评价指标。
一、方法1. 地面真实数据地面真实数据是一种常用的评价遥感影像分类精度的方法。
这种方法通过在实地调查和采集样本数据后,与遥感影像进行对比,判断分类结果的准确性。
可以采用随机抽样或系统抽样的方法获取地面真实数据,然后将其与遥感影像进行比对,在统计学上得到分类的精度指标。
2. 错误矩阵错误矩阵是一种常用的遥感影像分类精度评价方法。
错误矩阵是通过将地面真实数据与分类结果进行对照,统计不同分类的正确和错误像素数目而构建出来的混淆矩阵。
通过错误矩阵可以得到分类结果的整体准确率、各类别的准确率和召回率等指标。
3. Kappa系数Kappa系数是以混淆矩阵为基础的一种精度评价方法。
Kappa系数通过计算分类结果与地面真实数据之间的一致性,考虑到偶然性因素,从而更准确地评估分类结果的准确性。
Kappa系数的范围为[-1,1],越接近1表示分类结果越准确。
二、评价指标1. 总体分类精度总体分类精度是指分类结果的整体准确率,用于评估遥感影像分类的整体准确性。
总体分类精度可以通过错误矩阵中所有分类正确的像素数目与总像素数目之比来计算。
2. 类别准确率和召回率类别准确率是指分类结果中某一类别的正确率,即分类结果中该类别正确分类的像素数目与该类别总像素数目之比。
召回率是指地面真实数据中某一类别被正确分类的像素数目与该类别总像素数目之比。
通常来说,类别准确率和召回率越高,表示分类结果越准确。
3. 用户精度和生产者精度用户精度是指分类结果中某一类别的正确率,与类别准确率的概念相同。
生产者精度是指地面真实数据中某一类别正确分类的像素数目与分类结果中该类别总像素数目之比。
用户精度和生产者精度是相互关联的,通过综合考虑分类结果和地面真实数据的信息,可以更全面地评估分类结果的准确性。
监督分类后处理和精度评价
监督分类后处理和精度评价监督分类是机器学习中常用的一种方法,它通过训练模型来预测给定输入的类别。
然而,分类模型的输出可能不够理想,需要进行后处理和精度评价来提高分类的准确性。
本文将介绍监督分类后处理和精度评价的方法,并讨论其优缺点。
重采样方法是解决样本不平衡问题的一种常用后处理方法。
当样本的类别分布不均衡时,模型容易偏向于多数类别。
使用重采样方法可以增加少数类别样本的数量,以缓解这种偏差。
常见的重采样方法包括过采样方法(如SMOTE)和欠采样方法(如NearMiss)。
决策规则是另一种常见的后处理方法。
当分类器的预测结果不确定或存在边缘情况时,决策规则可以根据先验知识或专家经验对结果进行修正。
常见的决策规则有多数投票法和加权投票法等。
特征选择和特征组合也是常用的后处理方法。
通过选择最相关的特征或将多个特征组合成新的特征,可以提高模型的分类能力。
常见的特征选择方法包括过滤法和包装法,而特征组合方法包括特征乘积和特征差等。
除了后处理之外,精度评价是评估分类模型性能的重要指标。
常用的精度评价指标包括准确率、召回率、F1值和ROC曲线等。
准确率是分类器正确分类的样本数占总样本数的比例。
准确率高不代表分类器性能好,在样本不平衡的情况下,准确率可能会被多数类别主导。
召回率是指分类器能够正确识别为正样本的比例。
召回率高表示分类器对正样本的识别能力较好,但忽略了分类器对负样本的识别能力。
F1值综合了准确率和召回率,并平衡了两者之间的关系。
F1值越高,分类器的性能越好。
ROC曲线描述了分类器在不同阈值下的准确率和召回率之间的关系。
一般情况下,ROC曲线越接近左上角,分类器的性能越好。
需要注意的是,不同的应用场景对精度评价指标的要求不同。
因此,根据实际需求选择适合的精度评价指标是十分重要的。
总之,监督分类后处理方法和精度评价指标可以提高分类模型的准确性和可靠性。
通过后处理方法对分类结果进行优化,可以修正分类器的误差;而通过精度评价指标来评估分类器的性能,可以选择最适合的分类器。
测量数据的精度评定与等级划分
测量数据的精度评定与等级划分引言:测量是科学研究以及工程技术领域中不可或缺的一环。
无论是在物理学、生物学还是制造业等领域,准确测量数据的获取都是保证实验结果科学可靠性和生产质量稳定性的关键因素。
然而,我们常常会发现,测量数据之间存在差异,不同测量结果之间的偏差有时会起到决定性作用。
因此,对于测量数据的精度评定与等级划分显得尤为重要。
一、精度评定的概念与意义精度评定是指对测量数据的准确程度进行客观评估的过程。
在做出科学研究或生产决策时,我们希望获得能够真实反映事物属性的准确数据。
精度评定通过对测量数据的质量进行评估,能帮助我们确定测量结果的可靠性,从而为科学研究和生产决策提供依据。
精度评定的意义在于:1. 保证科学研究的可靠性:科学研究是建立在实验数据的基础上进行的。
如果测量数据的精度无法保证,那么研究结果的准确性将无法得到保障。
2. 提高生产质量和效率:在工业生产中,准确的测量数据是保证产品质量和生产效率的重要因素。
通过精度评定,可以控制测量过程中的误差,从而提高产品的一致性和稳定性。
3. 保证产品安全性:如食品安全、药品安全等领域,准确的测量数据是保障产品安全性的基础。
通过精度评定,可以判断产品是否达到安全标准,从而保护消费者的权益。
二、精度评定的方法与指标1. 绝对误差和相对误差绝对误差是测量结果与真值之间的差异,可以通过对同一物理量的多次测量来计算平均值,然后与已知的真值相比较得出。
相对误差是绝对误差与测量结果的比值,通常以百分比形式表示。
绝对误差和相对误差是评定测量数据精度的基本指标,其数值越小,测量结果越准确。
2. 灵敏度和重复性灵敏度是指测量仪器对物理量变化的响应能力。
一个灵敏的测量仪器可以对微小变化作出准确的反应。
重复性是指在相同条件下重复测量同一物理量的结果之间的偏差。
灵敏度和重复性是评估测量仪器精度的重要指标。
三、测量数据的等级划分1. 一级测量数据一级测量数据是指在特定条件下经过精确校准并由熟练操作员进行测量得出的数据。
分类精度的评价范文
分类精度的评价范文分类精度是评价分类模型性能的一种指标,它衡量了模型在对样本进行分类时的准确性。
分类精度被广泛应用于各种分类任务,如自然语言处理、图像识别和信用评估等。
本文将从分类精度的定义、计算方法、优点和局限性等方面深入探讨分类精度的评价。
一、分类精度的定义和计算方法分类精度是指模型在对数据集中的样本进行分类后,正确分类的样本数与总样本数之间的比例。
其计算公式如下:分类精度=正确分类的样本数/总样本数例如,对于一个包含1000个样本的数据集,模型将其中900个样本正确分类,那么该模型的分类精度为900/1000=0.9,即90%。
二、分类精度的优点1.直观易懂:分类精度是一个直观易懂的指标,能够直接反映出模型的分类能力。
2.在不平衡数据集中也适用:分类精度在处理不平衡数据集时仍然有效。
即使数据集中其中一类样本数远大于其他类,分类精度仍然可以提供对模型性能的有效评估。
3.易于计算和解释:分类精度的计算方法简单明了,只需统计分类正确的样本数和总样本数即可。
同时,分类精度的取值范围为0到1之间,越接近1则代表模型的分类效果越好。
4.可比性高:分类精度是一个普适性指标,可以对不同模型、不同数据集的分类结果进行比较,便于评估和选择最优模型。
三、分类精度的局限性1.对不平衡数据集的敏感性:当数据集中其中一类样本数量远大于其他类时,模型往往会偏向于多数类,导致分类精度无法全面评估模型的表现。
2.无法区分不同错误类型:分类精度无法区分模型在不同类别之间的错误类型。
例如,在医疗诊断中,模型将一些患者错分为阳性或阴性,而无法区分具体是哪种错误。
3.无法衡量样本的重要性:分类精度只关注样本的分类准确性而不考虑样本的重要性。
对于有些任务,例如识别罕见疾病或者检测异常样本,误分类可能会导致严重的后果,而分类精度无法提供相关信息。
4.无法识别差异较小的模型性能:当不同模型的分类精度相近时,该指标无法告诉我们哪个模型的性能更优。
envi分类精度评价操作步骤
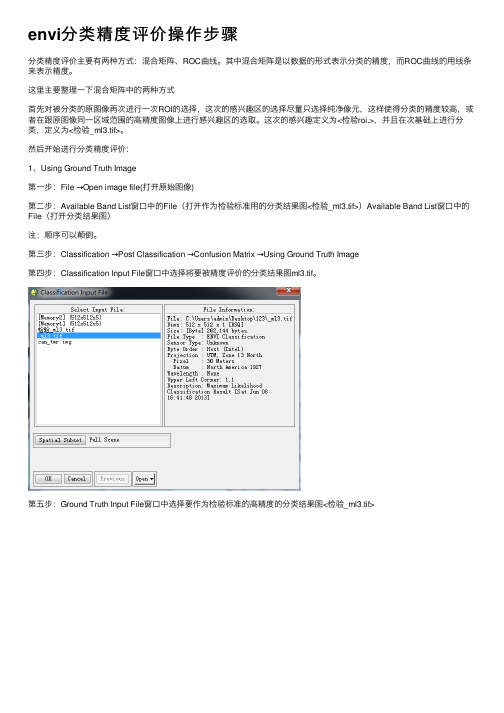
envi分类精度评价操作步骤分类精度评价主要有两种⽅式:混合矩阵、ROC曲线。
其中混合矩阵是以数据的形式表⽰分类的精度,⽽ROC曲线的⽤线条来表⽰精度。
这⾥主要整理⼀下混合矩阵中的两种⽅式⾸先对被分类的原图像再次进⾏⼀次ROI的选择,这次的感兴趣区的选择尽量只选择纯净像元,这样使得分类的精度较⾼,或者在跟原图像同⼀区域范围的⾼精度图像上进⾏感兴趣区的选取。
这次的感兴趣定义为<检验roi.>,并且在次基础上进⾏分类,定义为<检验_ml3.tif>。
然后开始进⾏分类精度评价:1、Using Ground Truth Image第⼀步:File →Open image file(打开原始图像)第⼆步:Available Band List窗⼝中的File(打开作为检验标准⽤的分类结果图<检验_ml3.tif>)Available Band List窗⼝中的File(打开分类结果图)注:顺序可以颠倒。
第三步:Classification →Post Classification →Confusion Matrix →Using Ground Truth Image第四步:Classification Input File窗⼝中选择将要被精度评价的分类结果图ml3.tif。
第五步:Ground Truth Input File窗⼝中选择要作为检验标准的⾼精度的分类结果图<检验_ml3.tif>第六步:在Match Classes Parameters窗⼝中,如果两套分类中的各类名称⼀样,则会⾃动匹配,若不⼀致,可⼿动匹配,然后点Add Combination第七步:Confusion Matrix Paeameter 窗⼝中选择精度评价的结果表⽰形式以及存储在哪个⽂件中第⼋步:出结果。
2、Using Ground Truth ROIs第⼀步:File →Open image file(打开原始图像)第⼆步:Available Band List窗⼝中的File(打开分类结果图)第三步:Available Band List窗⼝中的File(打开作为检验标准⽤的分类结果图<检验_ml3.tif>)注:这个分类结果图在Gray Sxale中是彩⾊的注:第⼆步与第三步的顺序不可以乱,必须在作为检验标准的分类结果图被打开的前提下才可以进⾏Using Ground Truth ROIs精度评价。
遥感图像分类的精度评价(kappa统计值与分类精度的对应关系)
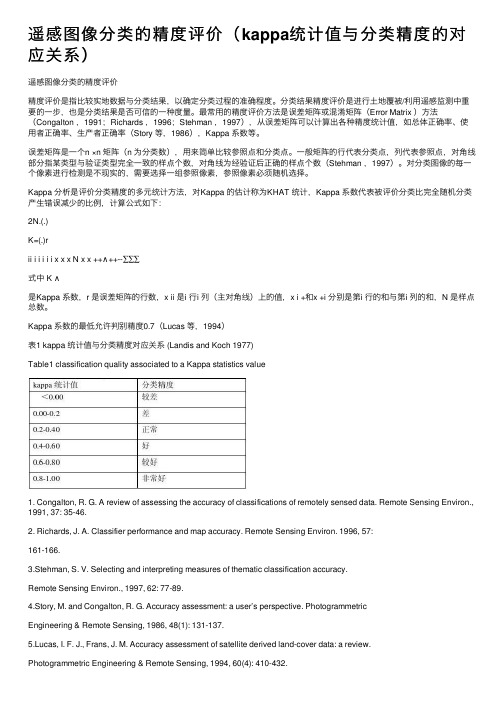
遥感图像分类的精度评价(kappa统计值与分类精度的对应关系)遥感图像分类的精度评价精度评价是指⽐较实地数据与分类结果,以确定分类过程的准确程度。
分类结果精度评价是进⾏⼟地覆被/利⽤遥感监测中重要的⼀步,也是分类结果是否可信的⼀种度量。
最常⽤的精度评价⽅法是误差矩阵或混淆矩阵(Error Matrix )⽅法(Congalton ,1991;Richards ,1996;Stehman ,1997),从误差矩阵可以计算出各种精度统计值,如总体正确率、使⽤者正确率、⽣产者正确率(Story 等,1986),Kappa 系数等。
误差矩阵是⼀个n ×n 矩阵(n 为分类数),⽤来简单⽐较参照点和分类点。
⼀般矩阵的⾏代表分类点,列代表参照点,对⾓线部分指某类型与验证类型完全⼀致的样点个数,对⾓线为经验证后正确的样点个数(Stehman ,1997)。
对分类图像的每⼀个像素进⾏检测是不现实的,需要选择⼀组参照像素,参照像素必须随机选择。
Kappa 分析是评价分类精度的多元统计⽅法,对Kappa 的估计称为KHAT 统计,Kappa 系数代表被评价分类⽐完全随机分类产⽣错误减少的⽐例,计算公式如下:2N.(.)K=(.)rii i i i i i x x x N x x ++∧++--∑∑∑式中 K ∧是Kappa 系数,r 是误差矩阵的⾏数,x ii 是i ⾏i 列(主对⾓线)上的值,x i +和x +i 分别是第i ⾏的和与第i 列的和,N 是样点总数。
Kappa 系数的最低允许判别精度0.7(Lucas 等,1994)表1 kappa 统计值与分类精度对应关系 (Landis and Koch 1977)Table1 classification quality associated to a Kappa statistics value1. Congalton, R. G. A review of assessing the accuracy of classifications of remotely sensed data. Remote Sensing Environ., 1991, 37: 35-46.2. Richards, J. A. Classifier performance and map accuracy. Remote Sensing Environ. 1996, 57:161-166.3.Stehman, S. V. Selecting and interpreting measures of thematic classification accuracy.Remote Sensing Environ., 1997, 62: 77-89.4.Story, M. and Congalton, R. G. Accuracy assessment: a user’s perspective. PhotogrammetricEngineering & Remote Sensing, 1986, 48(1): 131-137.5.Lucas, I. F. J., Frans, J. M. Accuracy assessment of satellite derived land-cover data: a review.Photogrammetric Engineering & Remote Sensing, 1994, 60(4): 410-432.。
分类精度评价范文
分类精度评价范文分类精度评价是对分类模型的性能进行评估的一种方法。
分类问题是机器学习中的一种常见任务,其目标是将输入数据划分为预定义的类别。
分类模型通过学习训练数据的模式和特征来对新数据进行分类预测。
分类精度评价可以帮助我们了解分类模型的性能,判断其是否能够准确地预测新数据的类别。
1. 准确率(Accuracy):准确率是分类模型预测正确的样本数量与总样本数量之比。
准确率是最常用的分类精度评价指标之一,并且易于理解和解释。
然而,当类别不平衡或存在大量严重错误分类的情况下,准确率可能会忽略一些关键的错误。
2. 精确率(Precision):精确率是分类模型预测为正例的样本中真正正例的比例。
精确率可以帮助我们评估模型的分类错误情况,特别是假阳性的情况。
例如,在医学诊断中,假阳性的情况可能会导致错误的治疗决策。
3. 召回率(Recall):召回率是分类模型预测为正例的样本中真正正例的比例。
召回率可以帮助我们评估模型对正例样本的识别能力,特别是假阴性的情况。
例如,在垃圾邮件过滤中,假阴性的情况可能导致重要的邮件被错误分类为垃圾邮件。
4. F1-score:F1-score是精确率和召回率的调和均值,用于综合评估分类模型的性能。
F1-score可以帮助我们平衡分类模型在精确率和召回率之间的表现。
5. ROC曲线与AUC值:ROC曲线是以假阳性率(False Positive Rate)为横轴,真阳性率(True Positive Rate)为纵轴的曲线。
ROC曲线可以帮助我们评估分类模型在不同分类阈值下的性能表现。
AUC(Area Under Curve)值是ROC曲线下的面积,它可以用来综合评估分类模型的性能。
6. 混淆矩阵(Confusion Matrix):混淆矩阵是一个二维表格,用于可视化分类模型的预测结果与真实结果之间的差异。
混淆矩阵可以帮助我们更直观地了解分类模型在各个类别上的表现。
评价分类模型的分类精度时,我们通常需要考虑所处理的具体问题。
分类精度评价的指标
分类精度评价的指标分类精度评价是评估机器学习模型分类任务性能的重要指标。
在分类任务中,模型将输入的样本分到不同的类别中,而分类精度评价指标用于衡量模型分类结果与实际类别之间的一致性程度。
本文将介绍几个常用的分类精度评价指标。
1. 准确率(Accuracy)准确率是最常用的分类精度评价指标之一。
它表示模型预测正确的样本数占总样本数的比例。
准确率越高,表示模型分类结果越准确。
然而,准确率无法很好地评估在不平衡数据集中的分类任务,因为它只关注整体样本分类的准确性,而不考虑各个类别之间的差异。
2. 精确率(Precision)精确率是衡量模型预测为正例中真正为正例的比例。
精确率高表示模型预测出的正例很少是错误的。
精确率适用于关注模型预测为正例的准确性的情况,例如垃圾邮件分类任务。
然而,精确率忽略了模型没有预测出的真正正例,可能导致漏报的问题。
3. 召回率(Recall)召回率是衡量模型预测正确的正例占实际正例的比例。
召回率高表示模型能够捕捉到更多正例。
召回率适用于关注模型对正例预测的全面性的情况,例如疾病诊断任务。
然而,召回率忽略了模型错误预测的负例,可能导致误报的问题。
4. F1分数(F1-score)F1分数综合考虑了精确率和召回率,是精确率和召回率的调和平均值。
F1分数综合了模型预测正例的准确性和全面性,适用于关注模型整体分类性能的情况。
F1分数越高,表示模型在精确率和召回率之间取得了较好的平衡。
5. ROC曲线和AUC(Area Under Curve)ROC曲线是以真正例率(True Positive Rate)作为纵轴,假正例率(False Positive Rate)作为横轴绘制的曲线。
ROC曲线能够展示模型在不同阈值下的分类性能,从而帮助选择合适的阈值。
AUC 表示ROC曲线下的面积,是一个综合考虑了模型在不同阈值下的分类性能的指标。
AUC越接近1,表示模型的分类性能越好。
6. 混淆矩阵(Confusion Matrix)混淆矩阵是用于可视化分类模型预测结果的指标。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本章提要(…) §1 精度的概念和意义 §2 分类误差的来源 §3 误差特征 §4 精度评价方法 §5 误差矩阵的应用
本章主要介绍遥感影 像分类中产生的精度 问题及其评价方法, 并说明了误差矩阵在 遥感处理中的应用。
§1 精度的概念和意义
概念
精度是指“正确性”,即一幅不知道其质量的图像 和一幅假设准确的图像(参考图)之间的吻合度。
用户精度说明分类图的可信度
制图精度用来告知执行分类的分析人员
生 产 者 精 度 、 漏 分 误 差 用户精度、误分误差
§5 误差矩阵的应用
1 误差矩阵表示的误差
2 正确率的概念
3
正确率表示影像上或者样本中正确分类像元占总
像误元差的矩比例阵。的定量评价
4
正精误确 度差率。K矩是ap一阵pa种的法简比单的较精度测量方法,表示分类的
后续分类引入某些误差
地面景观特征也是误差的重要来源
重复观察的柱状图
偏差和准确度
§3 误差类型和特征
主要有两种类型
位置误差 分类误差
分类误差的特征
误差并非随机分布在影像上,而是显示出空间上的系统性和规则 性。
一般来说,错分像元在空间上并不是单独出现的,而是按照一定 的形状和分布位置成群出现。
正确率只误能差表矩示阵的分比类较的能确相定对最有适合效某性分,类目并标不的能影解像数决 分类误差据的类所型有、数问据题获。取时间、预处理过程,分类方法等
作业
遥感分类结果精度评价方法主要分为哪几种? 结合第十章至第十三章所学内容,以你自己的
理解说明遥感图像处理应该做到哪几个步骤就 能获取遥感图像上地物类型信息。
比较两幅图上每种类别的面积差异,用面积比例表示
这里的两幅影像每种类别面积相似,但边界位置有很大不 同。这种评价方法会产生很大的位置误差。
2 位置精度评价法
比较两幅图位置之间一致性的方法进行评价
这里的两幅影像每种类别面积相似,但边界位置有很大不 同。这种评价方法会产生很大的位置误差。
3 误差矩阵评价法
误差与他们属于的地块有着明确的空间关系,如他们倾向于出现 在边缘或地块内部。
Hale Waihona Puke §4 精度评价方法精度评价就是进行两幅地图的比较,其中一幅是基 于遥感数据的分类图,也就是需要评价的图,另一幅是 假设精确的参考图,作为比较的标准。
主要评价方法 面积精度评价法 位置精度评价法 误差矩阵评价法
1 面积精度评价法
表示误差的标准形式是误差矩阵,有时称为混淆矩阵,它 不仅能表示每种类别的总误差,还能表示类别的误分(混 淆的类别)。
误差矩阵的示例
误差矩阵的图解表示
4 误差矩阵的编辑
构建误差矩阵需要分析人员进行待评价的影像与参考影像之间 的点对点比较,准确地确定参考影像上的每个点在分类影像中 所对应点的位置。
配准
网格表示的类别图 网格就成为位置精度评价的比较单元
叠置
5 漏分误差和错分误差
误差矩阵能反映各类别的漏分误差和错分误差
漏分误差:EO,指地面上的森林类别在待评 价分类图上,有多少被错误地分到了其它类 别;——生产者精度
错分误差:EC,指将地面的农田或其他类别 在分类图上错误地划分为森林类别;——用户 精度
意义
遥感数据分类的精度直接影响由遥感数据生成的地 图和报告的正确性、将这些数据应用于土地管理的价 值、以及用于科学研究的有效性。
§2 分类误差的来源
主要是由同物异谱和同谱异物、混合像元以及不合
理的预处理等因素引起
混合像元值可能不同于任何一种类别的光谱值,而
被误分到其它类别
遥感图像的预处理中进行的辐射和几何校正可能对