基于坐标修正的定位算法
gps点校正知识
点校正就是求出WGS-84和当地平面直角坐标系统之间的数学转换关系(转换参数)。
在工程应用中使用GPS卫星定位系统采集到的数据是WGS-84坐标系数据,而目前我们测量成果普遍使用的是以1954年北京坐标系或是地方(任意|当地)独立坐标系为基础的坐标数据。
因此必须将WGS-84坐标转换到BJ-54坐标系或地方(任意)独立坐标系。
坐标系统之间的转换可以利用现有的七参数或三参数,也可以利用华测测地通软件进行点校正求四参数和高程拟合。
单点校正:利用一个点的WGS84坐标和当地坐标可以求出3个平移参数,旋转为零,比例因子为1。
在不知道当地坐标系统的旋转、比例因子的情况下,单点校正的精度无法保障,控制范围更无法确定。
因此建议尽量不要使用这种方式。
两点校正:可求出3个坐标平移参数、旋转和比例因子,各残差都为零。
比例因子至少在0.9999***至1.0000****之间,超过此数值,精度容易出问题或者已知点有问题;旋转的角度一般都比较小,都在度以下,如果旋转上百度,就要注意是不是已知点有问题三点校正:三个点做点校正,有水平残参,无垂直残差。
四点校正:四个点做点校正,既有水平残参,也有垂直残差。
点校正时的注意事项:1、已知点最好要分布在整个作业区域的边缘,能控制整个区域,并避免短边控制长边。
例如,如果用四个点做点校正的话,那么测量作业的区域最好在这四个点连成的四边形内部;2、一定要避免已知点的线形分布。
例如,如果用三个已知点进行点校正,这三个点组成的三角形要尽量接近正三角形,如果是四个点,就要尽量接近正方形,一定要避免所有的已知点的分布接近一条直线,这样会严重的影响测量的精度,特别是高程精度;3、如果在测量任务里只需要水平的坐标,不需要高程,建议用户至少要用两个点进行校正,但如果要检核已知点的水平残差,那么至少要用三个点;如果既需要水平坐标又需要高程,建议用户至少用三个点进行点校正,但如果要检核已知点的水平残差和垂直残差,那么至少需要四个点进行校正;4、注意坐标系统,中央子午线,投影面(特别是海拔比较高的地方),控制点与放样点是否是一个投影带;5、已知点之间的匹配程度也很重要,比如GPS观测的已知点和国家的三角已知点,如果同时使用的话,检核的时候水平残差有可能会很大的;6、如果有3个以上的点作点校正,检查一下水平残差和垂直残差的数值,看其是否满足用户的测量精度要求,如果残差太大,残差不要超过2厘米,如果太大先检查已知点输入是否有误,如果无误的话,就是已知点的匹配有问题,要更换已知点了;7、对于高程要特别注意控制点的线性分布(几个控制点分布在一条线上),特别是做线路工程,参与校正的高程点建议不要超过2个点(即在校正时,校正方法里不要超过两个点选垂直平差的)。
提高点位坐标精度的gnss差分修正方法及应用
提高点位坐标精度的gnss差分修正方法及应用
GNSS差分修正是通过利用两个或多个接收机之间的差分信号来提高
定位精度的方法。
一般来说,差分修正可以分为实时差分修正和后处理差
分修正。
实时差分修正可使接收器在实时环境下获得更准确的定位结果,
而后处理差分修正则可以在数据后处理期间对有关数据进行精细矫正。
对于点位坐标精度较高的定位应用,推荐使用实时差分修正方法。
该
方法的流程如下:
1.在ASCII格式的文本文件中输入基准站的数据,如时钟偏差、星历、码偏差等。
2.连接两个或多个接收器,选择其中一个作为移动接收器,另一个或
多个作为基准站接收器。
3.移动接收器从基准站接收器中接收到差分信号和基准站数据。
4.差分信号将移动接收器的信号与基准站接收器的信号进行比较,并
通过计算将移动接收器的位置矫正。
5.通过此修正可使移动接收器在实时环境下获得更准确的定位结果,
从而提高点位坐标精度。
对于对点位坐标精度要求不高的应用,如地图展示、轨迹记录等,建
议使用后处理差分修正方法。
该方法的流程如下:
1.收集经纬度数据。
2.将数据输入到差分比较软件中进行差分计算。
3.可以选择多种算法对数据进行处理,例如 Kalman 筛选器、最小二乘法等。
4.校正完后,数据即可在地图上进行展示,或者生成轨迹记录。
总之,GNSS差分修正是提高点位坐标精度的重要方法之一。
根据不同的应用场景,可以选择实时差分修正或后处理差分修正等方法,以提高定位的准确性。
测绘技术中的坐标纠正与形状校正技巧
测绘技术中的坐标纠正与形状校正技巧近年来,随着测绘技术的快速发展,人们对于地球上各种地理信息的获取和分析需求也越来越高。
在测绘过程中,坐标纠正和形状校正是保证测绘数据精确性和准确性的关键技术。
本文将介绍一些常用的坐标纠正和形状校正技巧,以帮助读者更好地了解和应用于实践中。
一、坐标纠正技巧在测绘工作中,由于各种误差的存在,测量得到的坐标数据可能存在一定的误差。
对于这种情况,我们常常需要对坐标数据进行纠正,提高其准确性。
下面将介绍几种常用的坐标纠正技巧。
1. 坐标差异分析法坐标差异分析法是一种常见且简单的坐标纠正方法。
它基于已知控制点的坐标和相应实测坐标之间的差异,通过计算误差值并对测量数据进行补正,从而达到纠正坐标的目的。
这种方法适用于测绘过程中遇到的小范围误差。
2. 动态平差法动态平差法是一种以最小二乘原理为基础的坐标纠正方法。
它通过建立数学模型,考虑各种误差的权重分配,对测量数据进行综合处理。
这种方法适用于大范围误差的纠正,能够有效提高坐标数据的准确性和可靠性。
3. GPS差分技术GPS差分技术是一种利用全球定位系统(GPS)测量数据进行坐标纠正的方法。
它基于多台GPS接收机之间的基线差异,通过相对定位和绝对定位的组合,对测量数据进行校正。
GPS差分技术在测绘工作中应用广泛,可用于高精度测量和细分领域。
二、形状校正技巧形状校正是指在测绘过程中对地物形状进行调整和修正的技术。
它有助于提高地物在地图上的表达和可视化效果,并进一步提高地图的质量。
下面将介绍几种常用的形状校正技巧。
1. 形态分析法形态分析法是一种通过分析地物的形状特征并进行调整的技术。
它基于地物形状的几何特征,如边界线的弯曲程度、内外角度等,通过调整节点和拟合曲线等手段,对地物形状进行校正和优化。
这种方法适用于较为简单的地物形状调整。
2. 形状变形模型形状变形模型是一种通过数学模型和算法对地物形状进行变形和调整的技术。
它可以根据具体需求,如局部地貌、建筑物平面图等,设计相应的形变模型,对地物形状进行仿真和调整,从而实现形状校正的目的。
基于RSSI的测距差分修正定位算法_任维政

基于 RSSI 的测距差分修正定位算法*
任维政 , 徐连明 , 邓中亮* , 王 川
(北京邮电大学电子工 程学院 , 北京 100876)
摘 要 :为了抑制 RSSI 误差对无线传感器节点自身定位精度的影响 , 以三边定位算法为基础 , 定义了个 体差异差 分系数 、距
离差分系数和距离差分定位方程 , 把离目标节点最近的 信标节点 作为参 考节点 对基于 RSSI 的 测距进 行差分 修正 , 并将差 分
分定位方程
di =d′i -ρie i0 i =1 , 2 , … , n
(8)
第7期
任维政 , 徐连明等 :基于 RSSI 的测距差分修正定位算法
1 249
其中 , di 为目标节点到第 i 个信标节点的修正距离 ,
参考节点测量距离误差 e0i =d′0i -d0i , n 为参与定
位的信标节点个数 。
-d
2 i
x2i
-x2k
+y
2 j
-y2k
+d2k
-d
2 j
(2)
1 .2 无线电传播路径损耗模型分析
由于传感器节点自身具备通信能力 , 通信控制
芯片通常会提 供测量 RSSI 的方法 , 在信标 节点广
播自身坐标的 同时可完成 RSSI 的测量 , 故 而是一
种低功率 、低代价的测距技术 。 其误差主要来源于
PL(d)=P L(d0)+10klg
d d0
+X σ
(4)
其中 , P L(d)为经过距离 d 后的路径损耗 , dB ;Xσ为
平均值为 0 的高斯分布随机变数 , 其标准差范围为 4
~ 10 。式中 k 的范围在 2 至 5 之间 。取 d =1 m , 代入 式(3), 可得到 Lo ss , 即P L(d0)的值 。这样根据上式
基于Euclidean修正的分布式加权定位算法
基于Euclidean修正的分布式加权定位算法付锴;雷勇;颜嘉俊【摘要】The traditional Multi-Dimensional Scaling ( MDS) algorithm adopts multi-hop distance to replace direct distance, resulting in low accuracy of the local network and large localization error in irregular network. Relative to the existing algorithms, the paper introduced the Euclidean algorithm to generate accurate multi-hop distance between nodes, and used weighting mechanism to improve the coefficient of stress. The simulation results show that in low connectivity rectangle network and C-shape network localization, this method acTheves better performance.%传统的多维定标(MDS)算法由于采用多跳距离代替节点间的直接距离,生成的局部网络准确度低,在不规则网络中定位误差大.相对于现有的算法,引入Euclidean方法来产生多跳节点间的准确距离,并采用一种加权机制来改进协强系数,以抑制累积误差.仿真结果表明该方法在C型网络和低连通度的矩形网络定位中能取得更好的效果.【期刊名称】《计算机应用》【年(卷),期】2011(031)012【总页数】4页(P3215-3218)【关键词】加权多维标度;多跳距离;局部地图;接收信号强度指示;节点定位;无线传感器网络【作者】付锴;雷勇;颜嘉俊【作者单位】四川大学电气信息学院,成都 610065;四川大学电气信息学院,成都610065;四川大学电气信息学院,成都 610065【正文语种】中文【中图分类】TN929.5;TP212.90 引言对于无线传感器网络(Wireless Sensor Network,WSN),不仅需要采集数据,还需要明白这些数据所来自的空间位置[1-2]。
测绘技术中如何进行坐标纠正

测绘技术中如何进行坐标纠正概述随着测绘技术的进步和应用领域的不断扩大,坐标纠正作为一项重要的技术手段,在保证测绘结果准确性和精度的同时具有重要的实际应用价值。
本文将探讨测绘技术中如何进行坐标纠正的问题,并深入分析不同纠正方法的优缺点。
一、坐标纠正的基本原理坐标纠正是指对测绘得到的坐标数据进行修正和更新,以提高其准确性和精度的过程。
在测绘过程中,由于各种误差的存在,测定的坐标往往会与地理实际位置产生偏差。
因此,进行坐标纠正是十分必要的。
坐标纠正的基本原理可以归结为两个方面:观测值的调整和模型的优化。
在观测值的调整中,通过对测量数据进行加权和先验条件的约束,使得坐标数据在最小二乘平差的条件下达到最优值。
而在模型的优化方面,则需要考虑地形、大地基准等因素,采取适当的变形模型对坐标进行修正。
二、坐标纠正的方法1. 最小二乘平差法最小二乘平差法是一种广泛应用的坐标纠正方法。
该方法以误差平方和最小为目标,通过对观测值的加权和误差方程的建立,对坐标进行优化调整。
最小二乘平差法的优点在于能够充分利用测量数据的信息,同时可以对不同类型的误差进行合理的加权处理。
然而,该方法也存在一定的局限性,例如对于大范围变形的地面,仅使用最小二乘平差法进行坐标纠正可能无法满足需求。
2. 网络平差法网络平差法是一种将坐标纠正问题转化为网络平差问题求解的方法。
它通过建立测量点之间的连接网络,根据测量数据中的误差信息,采用平差法对坐标进行修正。
网络平差法的优势在于可以充分考虑测量点之间的相互联系,有效地减小坐标纠正的误差。
与最小二乘平差法相比,网络平差法在复杂的地质环境下表现出更好的适应性和稳定性。
三、坐标纠正中需要注意的问题1. 参考坐标系的选择在进行坐标纠正时,选择合适的参考坐标系是非常重要的。
一方面,选取的坐标系应能够与现场实际地理坐标相匹配;另一方面,要考虑到后续数据处理的便利性和精度要求。
2. 要素的识别与分类坐标纠正过程中,需要对不同类型的要素进行识别和分类。
211131695_基于坐标标定的北斗RTK和UWB的变电站定位技术
实现对变电站作业人员的一举一动操作进行安全把 于测试时的电磁干扰。因此,定位技术在实际应用
控,可以有效避免不良事故和安全防护不到位的情 过程当中,其误差范围并不会对变电站作业人员的
况出现。同时,可以实现室内外对作业人员位置进 监控与定位等方面造成影响。
3 基于北斗RTK+UWB的变电站定位技术研究 3.1 实时动态测量分析
实时动态测量技术(Real Time Kinematic,
RTK)[4]作为北斗系统中的一项重要技术,主要是 以相对定位为根本,借助基准站和流动站等两者之 间的协同作业来实现。其工作流程主要为:当基准
CCoHpINyAriEgLhECt©TR博IC看AL网EQ. UAIlPlMREiNgThtINs DRUeSsTeRrYved.
带宽定位技术等。这些定位技术在电力系统中的 围,误入带电间隔,由于与带电设备安全距离不
应用,可以有效保障作业人员的安全。但由于变 够,危及电网及现场作业人员安全的问题。传统作
电站环境因素的影响,作业人员在进入危险区域 业范围人工围栏网布置高度有限,无法对大型作业
时,无法实现对人员位置的精准定位。因此,本 工器具的作业范围进行有效的提醒与保护。为了更
内定位研究方向得到广泛的应用。该项定位技术能 平面定位精度达±2mm+0.5ppm,高程定位精度达
2023.04.DQGY
够实现从纳秒到微秒之间不等的非正弦波窄脉冲, ±5mm+0.5ppm。因此,在变电站运维管控和生产
进行数据信息传输。同时,结合美国FCC相关章程 作业等方面应用时,利用GNSS增强定位能够对变电
PRODVCT AND TECHNIC‖产品与技术‖
站在接收到北斗卫星所观测的数据之后,通过该计 网、北斗定位终端和可穿戴移动设备、UWB室内基
GPS导航定位原理以及定位解算算法

GPS导航定位原理以及定位解算算法全球定位系统(GPS)是英文Global Positioning System的字头缩写词的简称。
它的含义是利用导航卫星进行测时和测距,以构成全球定位系统。
它是由美国国防部主导开发的一套具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航定位系统。
GPS用户部分的核心是GPS接收机。
其主要由基带信号处理和导航解算两部分组成。
其中基带信号处理部分主要包括对GPS卫星信号的二维搜索、捕获、跟踪、伪距计算、导航数据解码等工作。
导航解算部分主要包括根据导航数据中的星历参数实时进行各可视卫星位置计算;根据导航数据中各误差参数进行星钟误差、相对论效应误差、地球自转影响、信号传输误差(主要包括电离层实时传输误差及对流层实时传输误差)等各种实时误差的计算,并将其从伪距中消除;根据上述结果进行接收机PVT(位置、速度、时间)的解算;对各精度因子(DOP)进行实时计算和监测以确定定位解的精度。
本文中重点讨论GPS接收机的导航解算部分,基带信号处理部分可参看有关资料。
本文讨论的假设前提是GPS接收机已经对GPS卫星信号进行了有效捕获和跟踪,对伪距进行了计算,并对导航数据进行了解码工作。
1地球坐标系简述要描述一个物体的位置必须要有相关联的坐标系,地球表面的GPS接收机的位置是相对于地球而言的。
因此,要描述GPS接收机的位置,需要采用固联于地球上随同地球转动的坐标系、即地球坐标系作为参照系。
地球坐标系有两种几何表达形式,即地球直角坐标系和地球大地坐标系。
地球直角坐标系的定义是:原点O与地球质心重合,Z轴指向地球北极,X轴指向地球赤道面与格林威治子午圈的交点(即0经度方向),Y轴在赤道平面里与XOZ构成右手坐标系(即指向东经90度方向)。
地球大地坐标系的定义是:地球椭球的中心与地球质心重合,椭球的短轴与地球自转轴重合。
地球表面任意一点的大地纬度为过该点之椭球法线与椭球赤道面的夹角φ,经度为该点所在之椭球子午面与格林威治大地子午面之间的夹角λ,该点的高度h为该点沿椭球法线至椭球面的距离。
GPS定位误差及修正算法
时 延
4
8
12
16
20
24
电离层改正时延图
该模型基本反应了电离层的变化特性,从 大尺度上保证了电离层时间延迟的周日平 均特性,确定每天电离层影响最大的是当 地时间的14:00,是符合中纬度地区的大 量实验资料的。
我国在北半球中纬度地区,因此运用 Klobuchar模型对我国GPS接收机进行电离 层改正是可靠和可行的。电离层误差修正 如下式所示, 其中,F为倾斜因子
A为卫星轨道长半轴,单位为 米;Ek为卫星轨道偏近点角。
地球旋转效应误差
GPS信号从20200千米的高空传播到 GPS信号接收机,需要0.067秒左右的时间。 由于地球不停的自转(地面测站相对于地 心的运行速度约为0.46千米/秒),GPS信 号到达接收机时卫星的在轨位置不同于信 号从卫星发送时的卫星在轨位置。
相对论效应修正
虽然经过上述改正,但是相对论效应所产生的时 间偏移并非常数,对于某一给定偏心率e的GPS卫 星,一阶相对论效应改正如下:
F e为偏心率,
2
c2Байду номын сангаас
其中, = 3.986005E+14m3/sec2;
C=2.99792458E+8 m/sec; F=-4.442807633×10-10 s / m
一种对流层的修正方法
Rtro 2.4224 exp( 0.13346 ) 10 3 h 0.026 sin E
h是接收机的海拔高度,单位是米; E是卫星高角,单位是弧度;
对流层误差及修正
另一种修正公式:
1255 Rtro 0.0027 sec(E )[ P ( 0.05)e tan2 ( E )] T
基于TDOA的chan算法(定位算法)

基于TDOA的chan算法(定位算法)Chan算法原理TDOA(TDOA,the time differences of arrival,到达时间差),Chan算法是TDOA定位方法的一个很好用的方法。
Chan算法是非递归双曲线方程组解法,具有解析表达式解,主要特点是:在测量误差服从理想高斯分布时,它的定位精度高、计算量小,并且可以通过增加已确定点的数量来提高算法精度。
该算法的推导前提是基于测量误差为零均值高斯随机变量,对于实际环境中误差较大的测量值,比如在有非视距误差的环境下,该算法的性能会有显著下降。
二维情况下,可分为只有三个点参与定位和三个点以上参与定位。
已知坐标 ( x 1 , y1 ) , ( x2 , y 2 ) , ( x3 , y 3 ) (x_1, y_1), (x_2, y_2), (x_3, y_3) (x1,y1),(x2,y2),(x3,y3),假设第未知点的坐标是 ( x , y ) (x, y) (x,y)根据几何关系定义一下关系表达式:r i = ( x i − x ) 2 + ( y i − y ) 2 r_i =\sqrt{(x_i-x)^2+(y_i-y)^2} ri=(xi−x)2+(yi−y)2... ... ... ( 1 ) \dots\dots\dots(1) (1)r i , 1 = r i − r 1 = ( x i − x ) 2 + ( y i − y ) 2 − ( x 1 − x ) 2 + ( y 1 − y ) 2 r_{i,1}=r_i-r_1=\sqrt{(x_i-x)^2+(y_i-y)^2}-\sqrt{(x_1-x)^2+(y_1-y)^2} ri,1=ri−r1=(xi−x)2+(yi−y)2−(x1−x)2+(y1−y)2... ... ... ( 2 ) \dots\dots\dots(2) (2)根据(1)另有如下关系:先令 K i = x i 2 + y i 2K_i=x_i^2+y_i^2 Ki=xi2+yi2r i 2 = x i 2 + y i 2 = K i − 2 x i x − 2 y i y + x 2 + y 2 r_i^2=x_i^2+y_i^2=K_i-2x_ix-2y_iy+x^2+y^2 ri2 =xi2+yi2=Ki−2xix−2yiy+x2+y2 … … … ( 3 )\dots\dots\dots(3) (3)根据(2)另外有如下关系:r i 2 = ( r i , 1 + r i ) 2 r_i^2=(r_{i,1}+r_i)^2 ri2 =(ri,1+ri)2 ... ... ... ( 4 ) \dots\dots\dots(4) (4)将(3)代入(4)可推出如下关系(关键):r i , 1 2 + 2 r i , 1 r 1 = x i 2 + y i 2 − 2 x i x − 2 y i y + 2 x 1 x + 2 y 1 y − ( x 1 2 + y 1 2 ) = r i 2 − r 1 2 r_{i,1}^2+2r_{i,1}r_1=x_i^2+y_i^2-2x_ix-2y_iy+2x_1x+2y_1y-(x_1^2+y_1^2)=r_i^2-r_1^2ri,12+2ri,1r1=xi2+yi2−2xix−2yiy+2x1x+2y1y−(x12+y12 )=ri2−r12 ... ... ... ( 5 ) \dots\dots\dots(5) (5)进一步,令 x i , 1 = x i − x 1 x_{i,1}=x_i-x_1 xi,1=xi−x1,有r i , 1 2 + 2 r i , 1 r 1 = ( K i − K 1 ) − 2 x i , 1 x − 2 y i , 1 y r_{i,1}^2+2r_{i,1}r_1=(K_i-K_1)-2x_{i,1}x-2y_{i,1}y ri,12+2ri,1r1=(Ki−K1)−2xi,1x−2yi,1y这里(5)是关键一步:消除了未知数的平方项,仅保留一系列的线性方程。
rtk算法流程

RTK算法流程RTK(Real-Time Kinematic)是一种基于GPS技术的实时动态定位方法,能够实现高精度、高可靠性的位置测量。
本文将详细介绍RTK算法的流程和步骤。
1. GPS原理在介绍RTK算法之前,我们先了解一下GPS(Global Positioning System)的原理。
GPS系统由24颗卫星组成,这些卫星围绕地球轨道运行,通过与地面上的接收器进行通信,提供位置和时间信息。
GPS接收器接收到来自多颗卫星的信号后,通过计算信号传播时间和卫星位置信息,可以确定接收器与各个卫星之间的距离。
至少需要三颗卫星的信号才能确定接收器的二维位置(经纬度),而四颗或更多卫星的信号可以确定接收器的三维位置(包括海拔高度)。
然而,由于环境干扰、大气延迟等因素影响,普通GPS定位精度较低(通常为几米到几十米)。
为了提高测量精度,采用RTK技术进行实时动态定位。
2. RTK算法概述RTK算法通过使用两个或多个接收器,其中一个作为基准站,另一个或多个作为流动站,利用基准站接收到的卫星信号数据进行差分计算,从而提高测量精度。
RTK算法的核心是载波相位差分。
GPS信号由载波和伪码组成,伪码用于计算距离,而载波相位包含了更多的信息。
通过对载波相位进行差分计算,可以消除大部分误差,从而实现高精度定位。
RTK算法流程主要包括以下几个步骤:步骤一:基准站观测数据采集首先需要在已知位置的基准站上安装GPS接收器,并将其设置为记录观测数据模式。
基准站接收到卫星信号后会记录下来,并将原始观测数据存储在内存中或外部存储器中。
步骤二:流动站观测数据采集与步骤一类似,在需要进行实时动态定位的流动站上也需要安装GPS接收器,并将其设置为记录观测数据模式。
流动站接收到卫星信号后同样会记录下来,并将原始观测数据存储在内存中或外部存储器中。
步骤三:基准站与流动站数据传输基准站和流动站之间需要建立数据传输通道,以便实现实时差分计算。
质心定位中的加权坐标误差修正方法
,
弱化系数 , 用 函数 A表示 , 现 在假 设标 记 节 点 的坐 标 为 ( , Y ), 整个 网络的节点数 为 n, 那么加权公式为
的中 点 , 其 坐标 为 ( ¨Y , ),( 。 , Y 。 ),( , Y ), 那 么 就有
从1 9 9 9年物联 网概念 的提 出开始 , 伴 随着计算 机信 的坐标数据后 , 这些坐标组 成一个 多边形 , 多边形 质心 的 息技术 的高速发展和物联 网技术 的不断成熟 , 物联 网应用 位置信息便为需要定位节点 的信息。 逐渐表现 出其方便快捷 、 应用范围广等优点 ¨ 。而作为
一
【 关键词】物联 网; 节点定位; 改进质心算法; 加权 【 中图分类号】T P 2 7 3
【 文献标志码】A
Co o r d i na t e Er r o r Co r r e c t i o n Me t ho d o f We i g h t e d Ce nt r o i d Lo c a l i z a t i o n
现有 的无线 传感 网络 未知节 点定 位算法 很 多 , 2 0世 纪末美 国学者 B u l u s u等提 出 了质 心定 位算 法 卜 , 2 0 0 3 年H e 等提 出了 A P I T节点定 位算 法 - 1 0 ] , 2 0 0 1 年D r a g o s N i c u l e s c u 等提 出了 A P S定 位算 法 … , 同年 A n d r e a s S a y . v i d e s 等提 出了 A H l o S定位算法 。但 是 , 这些无 线传感
t i o n i s pr o p o s e d.F i r s t l y,r a n g e — f r e e c e n t oi r d l o c a l i z a t i o n a l g o it r h m i s a na ly z e d .T h e d i s t a nc e b e t we e n ma r k i n g n o d e a n d un k n o wn n o d e i s me a s u r e d.An d
基于三点定位与加权坐标的三角定位算法
2020,56(9)1引言由于人类大部分时间都在室内活动,所以室内定位技术的研究变得更加重要。
而在室内定位技术的研究中,室内定位算法的选择将会直接影响定位结果的精准度。
目前,室内定位算法[1]主要分为基于测距和非测距两种。
典型的基于测距定位算法有:基于接收信强度指标RSSI [2]、基于到达时间TOA [3]、基于到达角度[4]、基于到达时间差TDOA [5]等。
典型的基于非测距定位算法有:Amorphous 算法[6]、质心算法[7]。
而基于测距定位算法较于基于非测距定位算法,具有更高的定位精度。
其中,基于RSSI 测距定位算法[8]由于开销最小而被广泛应用于室内定位系统。
基于RSSI 测距定位算法是利用节点从定位点接收到的功率,并通过功率距离转换和定位算法,推算出定位点的位置。
因此,对于基于RSSI 测距定位算法的改进方向主要为:降低RSSI 数据集的不稳定性,提高RSSI 测距模型的准确性和提高定位算法的精度。
文献[9]提基于三点定位与加权坐标的三角定位算法徐乐,韦玉科广东工业大学计算机学院,广州510006摘要:针对传统的基于接收信号强度指示(Received Signal Strength Indication ,RSSI )的三角定位算法产生的定位误差大和定位结果波动性大的问题,提出一种基于三点定位与加权坐标的三角定位算法。
该算法对RSSI 数据进行卡尔曼滤波操作,降低RSSI 数据的波动性;将滤波后数据经过基于RSSI 选取的三点定位算法,获取粗定位坐标;将获取的三个粗定位坐标基于加权坐标的三角定位算法得到待定位点坐标。
实验结果表明,在RSSI-距离衰减模型拟合度为96%的条件下,提出的算法的最大误差为1.602m ,平均误差为0.880m 。
关键词:三点定位;三角定位算法;RSSI 测距;坐标加权文献标志码:A中图分类号:TP393.03doi :10.3778/j.issn.1002-8331.1901-0156徐乐,韦玉科.基于三点定位与加权坐标的三角定位算法.计算机工程与应用,2020,56(9):111-116.XU Le,WEI Yuke.Triangulation algorithm based on three-point positioning and weighted puter Engi-neering and Applications,2020,56(9):111-116.Triangulation Algorithm Based on Three-Point Positioning and Weighted CoordinatesXU Le,WEI YukeSchool of Computer Science,Guangdong University of Technology,Guangzhou 510006,ChinaAbstract :To address significant localization errors and results fluctuation arising in the application of the traditional triangulation localization algorithm based on RSSI (Received Signal Strength Indication ),the paper offers a triangulation localization algorithm based on three-point localization and weighted coordinates.In this particular algorithm,RSSI data undergo Kalman filtering to reduce the data fluctuation.The filtered data are processed following the RSSI-based three-point localization algorithm to obtain coarse localization coordinates.Three obtained coarse coordinates are dealt with according to the weighted coordinate-based triangulation algorithm to acquire the coordinates of the point to be localized.Experiment results show that the error values from the algorithm proposed in the paper are not greater than 1.602m,with an average sitting at 0.880m,provided the fitting of RSSI-distance attenuation model reaches 96%.Key words :three-point positioning;triangulation algorithm;Received Signal Strength Indication (RSSI )ranging;coordi-nate weighting作者简介:徐乐(1994—),女,硕士研究生,研究领域为图像处理,E-mail :****************;韦玉科(1965—),女,博士,副教授,主要研究方向为人工智能和计算机测控技术。
导航电子地图中GPS坐标定位的改进算法
ag rt m c n e r v d h o g s e i c x mp e w t VB r g a lo h i a b p o e t r u h p cf e a l s i i h p o r mmi g T e mp o e a g r h n . h i r v d lo t m c n i a
XU L - i W U Xi o un un hu . a -y
(c o l o Cvl E g e r g a d T a sot i ,S uh hn nv r t o e h o g ,G a gh u 5 0 4 ,C i ) S h o f i n i ei n rn p r t n o t i n n ao C ia U ies y f T c n l y u n zo 1 6 0 hn i o a
Absr c : Th i r v d lo ih ta t e mp o e ag rt m o GPS c o d nae i ee to i ma fr n v g to i c n— f o ri ts n lcrnc p o a i ai n s o
p rd n a a zd i te rdt n l as— rg r r et n omua h pei o err a d h ae ad nl e wt h t io a y h a i G u s K u e po ci fr l,te rcs n r n te j o i o
b a p i d o h n vg to ee to i ma o t me s r me t n ma p n . e p le t t e a i ai n l cr nc p f he a u e n a d p i g Ke wo d y r s:GPS;i r v d lo ih ; Ga s Kr g r n vg to mp o e a g rt m us — u e ; a i ai n
landmarc的基本算法
Landmarc的基本算法Landmarc是一种基于地标的定位算法,用于在没有GPS信号的室内环境中确定用户的位置。
该算法使用了计算机视觉和机器学习的技术,在建筑物内部的地标点上建立了一个视觉地图,并利用这个地图来确定用户的位置。
1. 概述Landmarc的基本算法包括以下几个主要步骤:1.建立视觉地图:通过收集建筑物内部的视觉数据,包括图像和深度信息,利用计算机视觉技术建立一个视觉地图。
这个地图包含了建筑物内部的各种地标点,比如门、窗户、柱子等。
2.特征提取:从视觉数据中提取特征点,这些特征点具有鲁棒性和独特性,可以用来匹配和识别地标点。
3.匹配与识别:利用特征点匹配算法,在视觉地图和实时图像之间进行匹配,识别出用户所处的地标点。
4.位置推测:根据用户所处的地标点,通过一系列推理过程来估计用户的位置。
下面将详细介绍每个步骤的原理和具体实现方法。
2. 建立视觉地图建立视觉地图的过程可以分为两个主要步骤:数据采集和地标点提取。
2.1 数据采集为了建立视觉地图,需要在建筑物内部采集大量的视觉数据。
可以使用RGB-D摄像头,如Microsoft Kinect,在建筑物的各个位置拍摄图像,并获取深度信息。
2.2 地标点提取从采集到的视觉数据中提取地标点是建立视觉地图的关键步骤。
常用的方法是使用特征点提取算法,如SIFT(尺度不变特征变换)或ORB(Oriented FAST and Rotated BRIEF)算法。
这些算法可以从图像中提取出具有鲁棒性和独特性的特征点。
3. 特征提取特征提取是Landmarc算法中的核心步骤,它用于从实时图像中提取特征点,并与视觉地图中的地标点进行匹配。
常用的特征提取算法有SIFT和ORB算法。
这些算法可以在图像中检测到关键点,并计算这些关键点的描述子。
这些描述子具有鲁棒性和独特性,可以用于匹配和识别地标点。
4. 匹配与识别在Landmarc算法中,匹配和识别是利用特征点进行的,目标是将实时图像中的特征点与视觉地图中的地标点进行匹配和识别。
利用Kalman滤波修正卫星导航差分RTK定位坐标

利用Kalman滤波修正卫星导航差分RTK定位坐标熊杰;安毅;康荣雷;李阳;杨少帅;左芝勇【摘要】卫星导航差分RTK(Real Time Kinematic)定位方法的定位精度极易受到载波相位整周模糊度固定算法的影响,在模糊度固定失败的情况下,差分RTK定位将出现大幅偏差.针对该问题,基于Jerk模型提出了一种利用Kalman滤波修正差分RTK定位坐标的方法.在传统Jerk模型基础上,将卫星导航系统输出的载体运动速度信息引入状态空间模型的观测方程.基于扩展状态空间模型,利用Kalman滤波器实时修正载体的位置坐标.半实物仿真表明,所提方法能大幅改善卫星导航差分RTK定位精度.%The positioning accuracy of the differential global navigation satellite system(DGNSS) real time kinematic (RTK) system is extremely influenced by the carrier phase integer ambiguity resolution algorithms.Especially,when the integer ambiguity is failed to be fixed,the positioning deviation is bound to sharply increase.Against this issue,based on the Jerk model,a DGNSS RTK positioning coordinate adjusting algorithm via the Kalman filtering is proposed in this paper.The traditional Jerk model is augmented by adding the velocity information obtained from the GNSS single-point positioning into the observation equations.Based on this augmented state space model,the Kalman filtering is used to real-time adjust the DGNSS RTK positioning coordinate.The hardware-in-the-loop simulation results show that the suggested adjusting algorithm can significantly improve the positioning accuracy of the DGNSS RTK system.【期刊名称】《电讯技术》【年(卷),期】2017(057)006【总页数】6页(P666-671)【关键词】全球卫星导航系统;RTK技术;Jerk模型;Kalman滤波【作者】熊杰;安毅;康荣雷;李阳;杨少帅;左芝勇【作者单位】中国西南电子技术研究所,成都610036;中国西南电子技术研究所,成都610036;中国西南电子技术研究所,成都610036;中国西南电子技术研究所,成都610036;中国西南电子技术研究所,成都610036;中国西南电子技术研究所,成都610036【正文语种】中文【中图分类】TN961卫星导航差分RTK(Real Time Kinematic)技术具有高精度实时定位能力,越来越多地应用到飞行器编队飞行、无人机着陆、空中加油、电力、水利、数据链时间同步、CORS网、遥感测绘等诸多技术领域[1-4]。
一种基于移动坐标系的新型节点定位算法
节点定位是无线传感 器 网络 ( N ) WS s 最关键 的技术 之
一
,
因为节点 信息可用于 目标跟踪 、 盖范围 、 覆 环境监测 、 路 。现实应用 中, 定位的方法 有很多 , 当前用 得
由选择等
最 为 广 泛 的就 是 G S定 位 。 G S定 位 具 有 全 天 候 、 精 度 P P 高
从 目前情 况来看 , N WS s节点 定 位技术 大体 上 可 以分
为 以下 3种 :
定位技术精度最高 , 对硬件要求也最高 ; 但 有锚节点基于非 测距 的定位技术精度 较高 ; 锚节 点定位 技术可显 著降低 无 网络成本 , 对硬件要求较低 , 但定位精度最低 。
1 MC S算 法 及 其 实现
了 以下 措 施 :
有 G S装置的节 点 ) 其 中一个 移动 锚节 点 J P , 。每 个锚 节 点到坐标 系的距离是 已知的 , 且节 点 的通信 范 围均为一 固 定半径 的圆。第 m个位置未 知节 点在 其通信范 围内至少有
2个 以 上 邻居 锚 节 点 。
如 图 1 原点 0为移动节点在 时刻 的位置 , 轴方 向 , 为其移动方 向, 假设 移动节点 移动方 向为直线 ( 在实际应用 中, 节点可任意方 向运动 ) 。图中 , A为未 知节 点 , R为其通
Absr t: A d srb e no e o a ia in lo ihm b s d n t ac it utd i d lc lz to a g rt a e o mobl c o dia e y t ms s r s n e ie o r n t s se i p e e t d.I s t i ir lv n oditn e. e m o i g a c r n d ss ta h rgn t ui h o r i ae s se , l nk o re e a tt sa c Th v n n ho o e i e s t e o i i o b l t e c o d n t y t m whie u n wn d n de o n i g n t e eg bo ig n h r no s t l c t is l i t tm p r r c odi t s se .Unk o o s c u tn o h n ih rn a c o de o o a e tef n he e o ay o r nae y tm n wn r go fis l sc ntn o l a r we y fn n he pu lc s tt a c e n t e ti o ai n o ifr n e in o tefi o i u usy n ro d b dig t b i e h tpik d i he c ra n lc to f dfe e t i
基于改进TDOA算法的设计与仿真

ISSN1006-7167CN31-1707/TRESEARCHANDEXPLORATIONINLABORATORY第40卷第1期 Vol.40No.12021年1月Jan.2021 DOI:10.19927/j.cnki.syyt.2021.01.022基于改进TDOA算法的设计与仿真吴端坡, 李俊杰, 许晓荣, 冯 维, 刘兆霆(杭州电子科技大学通信工程学院,杭州310018)摘 要:为减弱信号传播中非视距等因素的影响,提高定位精度,提出改进到达时间差(TDOA)算法,给出了算法实现方案的流程和仿真对比结果。
该算法在TDOA算法的基础上,融入了速度和区域约束,以此判断目标是否超出移动距离阈值或者区域边界,对定位结果进行优化。
建模后对TDOA算法、速度受限定位算法、区域受限算法和改进TDOA算法进行了分析比较。
结果表明:当测量目标的定位精度、最大移动速度和采样频率分别发生改变时,改进TDOA算法的定位精度较TDOA算法明显提高。
该算法与其衍生算法(速度受限定位算法和区域受限定位算法)相比,成功融合了两种算法的优势,更好地提高了定位精度,实现了对非视距等定位误差的优化。
关键词:室内定位;TDOA算法;速度受限;区域受限中图分类号:TN925 文献标志码:A 文章编号:1006-7167(2021)01-0107-04DesignandSimulationofImprovedTDOAAlgorithmWUDuanpo, LIJunjie, XUXiaorong, FENGWei, LIUZhaoting(SchoolofCommunicationEngineering,HangzhouDianziUniversity,Hangzhou310018,China)Abstract:Inordertoreducetheinfluenceofnon line of sightandotherfactorsinsignalpropagationandimprovethepositioningaccuracy,animprovedtimedifferenceofarrival(TDOA)algorithmisproposed.Theflowchartofimprovedalgorithmimplementationandtheresultofsimulationaregiven.BasedontheTDOAalgorithm,theproposedalgorithmincorporatesspeedandarealimitationtojudgewhetherthetargetexceedsthemovingdistancethresholdortheregionboundary,andthenoptimizesthepositioningresults.Aftermodeling,theTDOAalgorithm,speedlimitedpositioningalgorithm,regionlimitedalgorithmandimprovedTDOAalgorithmareanalyzedandcompared.TheresultsshowthatthepositioningaccuracyoftheimprovedTDOAalgorithmissignificantlyhigherthanthatoftheTDOAalgorithmwhenthepositioningaccuracy,maximummovingspeedandsamplingfrequencyofthemeasurementtargetarechanged,respectively.Inaddition,comparedwiththederivedalgorithms(speedlimitedpositioningalgorithmandarealimitedpositioningalgorithm),theimprovedalgorithmsuccessfullyintegratestheadvantagesofthetwoalgorithms,improvesthepositioningaccuracyandoptimizesthepositioningerrorscausedbynon line of sightetc.Keywords:indoorpositioning;TDOAalgorithm;speedlimitation;arealimitation收稿日期:2020 03 08基金项目:教育部产学合作协同育人项目(201901284003);杭州电子科技大学通信工程学院院级教学研究改革项目(TXYB201804)作者简介:吴端坡(1988-),男,浙江杭州人,博士,讲师,研究方向为智能信号处理。
导航电子地图中GPS坐标定位的改进算法
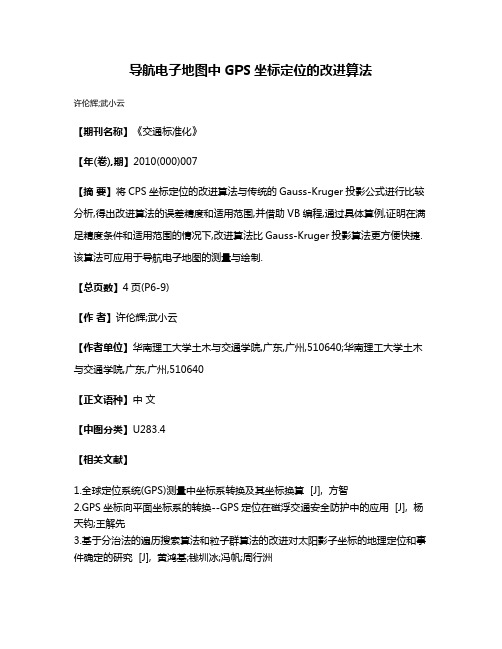
导航电子地图中GPS坐标定位的改进算法
许伦辉;武小云
【期刊名称】《交通标准化》
【年(卷),期】2010(000)007
【摘要】将CPS坐标定位的改进算法与传统的Gauss-Kruger投影公式进行比较分析,得出改进算法的误差精度和适用范围,并借助VB编程,通过具体算例,证明在满足精度条件和适用范围的情况下,改进算法比Gauss-Kruger投影算法更方便快捷.该算法可应用于导航电子地图的测量与绘制.
【总页数】4页(P6-9)
【作者】许伦辉;武小云
【作者单位】华南理工大学土木与交通学院,广东,广州,510640;华南理工大学土木与交通学院,广东,广州,510640
【正文语种】中文
【中图分类】U283.4
【相关文献】
1.全球定位系统(GPS)测量中坐标系转换及其坐标换算 [J], 方智
2.GPS坐标向平面坐标系的转换--GPS定位在磁浮交通安全防护中的应用 [J], 杨天钧;王解先
3.基于分治法的遍历搜索算法和粒子群算法的改进对太阳影子坐标的地理定位和事件确定的研究 [J], 黄鸿基;钱圳冰;冯帆;周行洲
4.一种改进的利用GPS载波相位差分定位对监测定位坐标修正的方法 [J], 张楠;
5.一种改进的利用GPS载波相位差分定位对监测定位坐标修正的方法 [J], 张楠因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
64
基于坐标修正的定位算法
一点,而是两两相交。因此,三角质心定位算法就是先将每两个圆的交点计算出来,然后将三个交点所 组成的三角形的质心作为盲节点的最终坐标,如图 5 所示。
Abstract
RSSI-based location method is increasingly used in indoor wireless positioning for its low power consumption, low cost and low hardware complexity. However, RSSI-based location also has many flaws, such as poor network stability, large environmental interference, leading to a large position error. For these, the paper puts forward an improved algorithm. First, we collect RSSI value 20 times using a Gaussian filter to filter out error sample and then get node coordinates by geometric algorithm. Finally, a new correction algorithm is proposed to correct coordinates. Test results show that this method can reduce the average error from 2.6 m to about 1.4 m; correction effect is obvious.
Hans Journal of Wireless Communications 无线通信, 2015, 5, 61-69 Published Online April 2015 in Hans. /journal/hjwc /10.12677/hjwc.2015.52009
Geometrical Location Algorithm Based on Position Correction
Tengfei Gao, Xiaoping Chen
School of Electronic & Information Engineering, Soochow University, Suzhou Jiangsu Email: funnygtf@ Received: Mar. 30th, 2015; accepted: Apr. 10th, 2015; published: Apr. 16th, 2015 Copyright © 2015 by authors and Hans Publishers Inc. This work is licensed under the Creative Commons Attribution International License (CC BY). /licenses/by/4.0/
63
基于坐标修正的定位算法
-35 -40 -45
RSSI/dBm
-50 -55 -60 -65 0
50
100
150 采样次数
200
250
300
Figure 1. 300 times RSSI value received at 1 m 图 1. 1 m 处收发 300 次的 RSSI 值
-35 均值于接收信号强度值(RSSI)的定位方法以其低功耗,低成本和较低的硬件复杂度等特点被越来越多的应
61
基于坐标修正的定位算法
用在室内无线定位中。但RSSI定位也有很多缺陷,如网络稳定性差,受到环境干扰大,从而导致较大的 定位误差。对此,提出了一些改进算法。首先连续采集20次RSSI值,采用高斯滤波将干扰较大的样本滤 除,然后通过几何算法得到节点坐标。最后提出一种新的修正算法对坐标进行修正。测试结果显示此方法 可以将平均误差从2.6 m降低到约1.4 m,修正效果明显。
pr ( d ) d −10 β log + X dB = d0 pr ( d 0 ) dB
(2)
X dB 为没有任何意义的高斯随机变量。
通常情况下,我们使用公式(2)的另外一种变换公式:
RSSI = A − 10n log d + X dB
(3)
Keywords
RSSI, Location Algorithm, Gaussian Filter
基于坐标修正的定位算法
高腾飞,陈小平
苏州大学电子信息学院,江苏 苏州 Email: funnygtf@ 收稿日期:2015年3月30日;录用日期:2015年4月10日;发布日期:2015年4月16日
-40
RSSI/dBm
-45
-50
-55 0
2
4
6
次数
8
10
12
14
Figure 2. Comparison of mean filter with Gaussian filter 图 2. 均值滤波与高斯滤波效果比较
离进行通信,获取对应距离的 RSSI 值。再利用(3)式确定最佳的 A 和 n。最终确定 A = ‒41,n = 3。测量 结果和 Shadowing 模型曲线如图 3 所示。 由于室内环境等因素的干扰, 所测得的 RSSI 值与距离的关系和模拟的曲线并不完全一致, 甚至有些 位置会产生较大的误差。距离与误差的关系如图 4 所示。其中测距误差 Er 等于实际距离与测量距离之差 的绝对值。即
Shadowing 模型分为两部分, 第一部分是 pass loss 模型, 他能够预测出当距离为 d 时的平均能量 pr ( d ) 。
(1)
其中, β 是 pass loss 指数,通常由具体场地测量得到,一般在 2~6 之间[7]。
62
基于坐标修正的定位算法
Shadowing 模型的第二部分反映了当距离不变时,接收到的能量的变化。它是一个对数正态随机变 量,当以 dB 为单位时,它满足高斯分布。完整的 Shadowing 模型公式如下:
2. 无线信号传播模型及误差分析
2.1. 无线信号传播模型
利用无线信号传输的理论模型,可以通过接收到的信号强度来进行定位。最常用于此方法的传播模 型是 Shadowing 模型[6]。 它使用了一个接近中心点的距离 d0 作为参考距离, pr ( d ) 相对于 pr ( d 0 ) 的计算如下:
pr ( d ) d = −10 β log d0 pr ( d 0 ) dB
其中,RSSI 为接收到的信号强度(dB⋅m),A 为一米处的 RSSI 值,n 即前面提到的 β 值,d 为测量距离。
2.2. RSSI 误差分析
由于 RSSI 值易受到环境因素的影响,从而产生较大的误差,所以想要得到较稳定的 RSSI 值就必须 先对其进行滤波处理。 图 1 是发送节点与接收节点间距 1 m 时, 收发 300 次得到的 RSSI 值。 从图中可以看出由于受到周围 物体和人体移动的干扰,RSSI 值大体呈现出高斯分布特性。 下面通过两种滤波方法对收集到的 RSSI 值滤波并进行比较。 首先采用均值滤波方法。均值滤波是指先采集 m 个数据,然后求其平均值,公式如下
f ( x) = 1 e
−
( x − µ )2
2σ 2
σ 2π
(5)
1 m 其中 µ = = ∑ RSSIi , σ m i =1
1 m 2 ∑ ( RSSIi − µ ) 。 m − 1 i =1
选取 m = 20,将采集到的 300 个数据分成 15 组,然后分别用均值滤波和高斯滤波进行处理。高斯滤 波中选取在 µ − σ < x < µ + σ 范围的采样值,然后求平均值。两种滤波结果如图 2 所示。 从图中可以看到均值滤波虽然起到了一定的滤波作用,但由于其固有的特性,一些扰动大的错误数 据并没有被去除掉,而是被平均到各个采样值中,因此最后得到的结果仍然有较大的误差。而高斯滤波 采取的是先滤除概率小,干扰大的数据,然后再求平均值,所得到的效果比均值滤波好。因此,本文中 选择高斯滤波来对接收到的 RSSI 值进行处理。
RSSI = 1 m ∑ RSSIi m i =1
(4)
第二种方法是高斯滤波。高斯滤波器处理数据的原则是对数据进行 m 次采样,其中必然存在小概率 事件。可以通过高斯滤波模型先将这些小概率的数据滤除掉,然后再求平均值。这样就避免了这些概率 小,干扰大的数据的影响,从而提高精度[8]。 对于信号强度而言,假设 m 次采样符合均值为 µ ,方差为 σ 的高斯分布,则对于 RSSIi ,测量结果 x 的密度函数为式(5)
关键词
RSSI,定位算法,高斯滤波
1. 引言
随着移动设备,无线网络技术的不断发展,无线传感器网络(wireless sensor networks, WSNs)的应用 也越来越广泛。而在无线传感器网络中,位置信息又是至关重要的,事件发生的位置或获取信息的节点 位置往往是网络中的重要信息。因此,确定事件发生的位置或者获取信息的节点位置是无线传感器网络 最基本的功能之一[1]。 在室外定位中,全球定位系统(GPS)已经很好的解决了定位问题。它通过 GPS 接收器接收来自 4~20 个卫星的信号,然后通过这些信号的到达时间差(TDOA)进行定位。而在室内环境下,GPS 系统由于卫星 信号受到阻隔而无法完成定位[2]。因此,通过何种方法进行室内定位并得到较好的效果已经成为无线传 感器网络领域的一大研究热门。 在室内定位中,通常的方法是通过测距来实现定位。而测距的主要方法有如下几种:AOA (Angle of Arrival),TOA (Time of Arrival),TDOA (Time Difference of Arrival)和 RSSI (Received Signal Strength Indication) [3]。其中 RSSI 是最常用的测距方法之一。它可以在每次数据传输中获得,不需要额外的带宽和 能量,也不需要额外的硬件花费[4]。然而利用 RSSI 测距也有着不容忽视的缺点。因为传感器节点往往 要部署在复杂的环境中,信号的接收强度会受到多径效应,非视距以及天线增益等影响,对信号的传播 损耗产生明显的改变,从而在获取距离信息时产生较大的误差[5]。因此,要想通过 RSSI 方法得到较好 的定位效果,就必须要尽量的消除 RSSI 测距过程中的误差。 在 RSSI 定位过程中, 较常用的方法主要有三角质心算法, 加权三角质心算法, 位置指纹定位算法等。 而本文选择一种新的算法,即几何定位算法进行位置确定。几何定位算法就是通过围成正方形的四个锚 节点,运用简单的几何知识对盲节点进行定位。然后再提出一种基于几何定位的坐标修正算法,对估计 坐标向四个锚节点方向依次进行修正,得到最终结果。