模板匹配(机器视觉算法与应用)及应用
一种2D无标定板机器人视觉定位方法及应用
一种2D无标定板机器人视觉定位方法及应用摘要:通过阐述相机坐标系与机器人坐标系之间的变换关系,利用特征定位与模板匹配算法,搭建标定与定位流程,设计并实现了一套无需标定版的2D视觉定位抓取方案。
实验结果表明,视觉定位的单边误差均值为0.236mm,机器人实际抓取误差均值0.32mm,实现工业机器人抓取。
相比于需要标定板的传统视觉定位方法,该视觉定位系统标定无需高精度标定板,只需要特征明显的定位区域,满足生产要求。
关键词:模板匹配;特征定位;工业机器人;自动化;标定;视觉定位;工业相机A 2D non-calibration plate robot visual positioning method and applicationThe first author1(School of Mechanical & Electrical Engineering, Wuhan Institute of Technology, Wuhan 430200, China )Abstract: By elaborating the transformation relationship between camera coordinate system and robot coordinate system, the calibration and positioning process was built. A 2D visual positioning and grasping scheme without calibration was designed and realized. The experimental results show that the average unilateral error of visual positioning is 0.236mm, and the average grasping error of robot is0.32mm, realizing industrial robot grasping. Compared with the traditional visual positioning method that requires calibration plate, the vision positioning system calibration does not need high-precisioncalibration plate but only needs the positioning area with obvious characteristics, which fully meets the requirements of the enterprise automatic production line.Keywords:Template matching;Feature location;Industrial robot;Industrial camera; Automation;Calibration;Visual positioning0 引言机器视觉定位是一门涵盖图像处理、人工智能、计算机科学的交叉学科,在智能制造领域应用广泛[1,2,3]。
halcon圆形模板匹配的中心点

halcon圆形模板匹配的中心点Halcon圆形模板匹配是一种图像处理方法,用于在给定图像中寻找与预先定义的圆形模板最相似的圆形区域。
匹配技术可以应用于很多领域,包括机器视觉、工业自动化、医学图像处理等。
圆形模板匹配的中心点是识别出的圆形区域的中心坐标,它具有重要的意义,可以用于进一步分析和处理图像。
从技术的角度来看,Halcon圆形模板匹配是基于灰度图像处理的。
首先,通过提取图像的灰度信息,将彩色图像转换为灰度图像。
然后,定义一个圆形模板,包括圆心的位置和半径的大小。
接下来,通过计算图像与模板之间的相似性度量,如相关系数、均方差等,来评估匹配的好坏。
最后,根据相似性度量的结果,确定最匹配的圆形区域以及其中心点的位置。
在Halcon中,圆形模板匹配的中心点可以通过以下步骤获得:1.导入图像:使用Halcon提供的图像处理函数,将图像从文件中读取或者通过相机进行采集。
选择合适的图像预处理方法,如去噪、增强对比度等,以优化图像的质量。
2.定义圆形模板:通过Halcon提供的模板定义函数,以指定圆形模板的参数,包括圆心位置和半径大小。
根据具体的应用需求,可以通过交互方式调整模板参数,以获取最佳的匹配结果。
3.进行模板匹配:使用Halcon的模板匹配函数,将图像和模板作为输入,通过计算相似性度量来获得匹配的结果。
Halcon提供了多种度量方法,如相关系数、均方差、灰度差异等,可以根据具体需求选择合适的度量方法。
4.查找匹配结果:根据模板匹配的结果,通过Halcon提供的区域操作函数,可以提取出与模板最匹配的圆形区域。
通过计算区域的中心坐标,即可获得圆形模板匹配的中心点的位置。
5.后续处理和分析:根据实际需求,可以对匹配到的圆形区域进行进一步的处理和分析。
例如,可以计算圆形的面积、周长等形状参数,或者根据中心点的位置进行其他相关的图像处理操作。
总的来说,Halcon圆形模板匹配的中心点是通过计算相似性度量和区域操作,从预定义的圆形模板中获得的。
halcon模板匹配的角度旋转规则
Halcon模板匹配的角度旋转规则1.介绍H a lc on是一款用于图像处理和机器视觉的高性能软件库。
在图像匹配领域,H al co n提供了模板匹配的功能,可以用于精确定位和识别图像中的特定目标。
本文将介绍Ha lc on模板匹配中的角度旋转规则。
2.模板匹配概述模板匹配是一种常用的图像处理技术,用于在给定的图像中寻找与一个预定义模板最相似的局部区域。
该技术的核心思想是将模板图像与目标图像进行比较,通过计算相似性度量来确定匹配程度。
3.模板匹配的挑战在实际应用中,目标物体可能存在旋转变换,这给模板匹配带来了挑战。
如果模板图像和目标图像的角度存在一定差异,传统的模板匹配方法可能无法准确匹配。
4. Ha lcon的角度旋转规则为了解决旋转不变性的问题,Ha lc on采用了一套角度旋转规则。
具体来说,H al co n使用模板的角度信息来旋转模板图像,并通过匹配多个角度下的旋转后的模板图像与目标图像进行比较。
4.1角度调节范围H a lc on允许用户指定一个角度调节范围,用于生成旋转后的模板图像。
这个范围的选择取决于应用场景和目标物体的旋转变化范围。
4.2角度步长在生成旋转后的模板图像时,Ha lc on还允许用户指定一个角度步长。
较小的步长可以提高匹配的准确性,但会增加计算复杂度。
通常情况下,用户需要根据具体情况权衡准确性和计算效率。
4.3角度选择规则对于每个旋转角度下生成的模板图像,Ha l co n会将其与目标图像进行比较,并计算相似性度量值。
最终,H alc o n会选择具有最高相似性度量值的旋转角度作为匹配结果。
4.4旋转匹配的准确性通过使用角度旋转规则,Ha lc on能够在一定程度上提高模板匹配的准确性。
然而,由于旋转变换可能引入一定的变形,匹配结果可能会受到影响。
因此,在实际应用中,用户需要根据具体情况进行测试和调优,以达到最佳的匹配效果。
5.总结在H al co n模板匹配中,角度旋转规则是解决旋转不变性的关键。
机器视觉模板匹配算法
机器视觉模板匹配算法
机器视觉模板匹配算法是一种基于图像处理技术的图像识别与
匹配方法。
该算法的基本思想是先将需要识别的目标图像称为模板,然后通过将其与待识别图像进行比对,找出相似度最高的区域,以识别目标。
在这个过程中,模板匹配算法可以通过像素级别的比较,快速准确地实现对目标区域的检测与识别。
模板匹配算法主要包含以下几个步骤:首先,需要将模板图像与待识别图像进行灰度化处理,以便进行像素级别的比较。
接着,将模板图像覆盖在待识别图像上,逐个像素比较,得到一个相似度矩阵。
其中,相似度矩阵中的每一个元素代表了图像上对应像素的相似程度。
最后,通过寻找相似度矩阵中的最大值,即可找到待识别图像中与模板图像最相似的区域。
目前,模板匹配算法已经广泛应用于各种领域,如医学影像分析、工业视觉检测、安防监控等。
在实际应用中,模板匹配算法可以通过不同的算法组合和参数设置,实现不同场景下的目标检测和识别。
- 1 -。
halcon基于边缘的模板匹配算法
文章主题:Halcon基于边缘的模板匹配算法探析一、引言在机器视觉领域,模板匹配是一种常用的图像处理方法,用于在一幅图像中寻找特定的模式或对象。
而Halcon作为一款智能视觉软件库,其基于边缘的模板匹配算法备受关注。
本文将就Halcon基于边缘的模板匹配算法进行深入探讨,以帮助读者更全面地理解这一主题。
二、Halcon基于边缘的模板匹配算法概述Halcon基于边缘的模板匹配算法是一种高级的模式识别技术,它通过检测图像中的边缘信息,并利用这些边缘特征进行模式匹配。
该算法主要包括边缘提取、模板生成和匹配验证三个步骤。
1. 边缘提取在Halcon中,边缘提取是通过边缘检测滤波器进行的。
常用的边缘检测算子包括Sobel、Prewitt和Canny等。
通过这些算子可以将图像中的边缘特征提取出来,形成边缘模型。
2. 模板生成在模板生成阶段,Halcon会通过提取的边缘信息来生成待匹配的模板。
模板的生成需要考虑到图像的尺度、旋转、光照等因素,以保证模板的鲁棒性和准确性。
3. 匹配验证匹配验证是模板匹配算法的核心步骤,Halcon基于边缘的模板匹配算法通过对图像进行模板匹配,并对匹配结果进行验证和优化,以确保匹配的准确性和稳定性。
三、Halcon基于边缘的模板匹配算法的特点相比于传统的模板匹配算法,Halcon基于边缘的模板匹配算法具有以下几点突出特点:1. 鲁棒性强由于边缘特征包含了物体的轮廓和形状等重要信息,因此Halcon基于边缘的模板匹配算法对光照、变形等因素的鲁棒性较强,能够更准确地匹配目标对象。
2. 适用性广Halcon基于边缘的模板匹配算法不受物体颜色、纹理等因素的影响,因此适用于各种场景和对象的匹配识别,具有较强的通用性和适用性。
3. 计算速度快由于边缘特征的提取和匹配计算相对简单,Halcon基于边缘的模板匹配算法在计算速度上具有一定的优势,能够实现实时性要求较高的应用场景。
四、个人观点与总结在我看来,Halcon基于边缘的模板匹配算法在实际应用中具有广泛的前景。
模板匹配方法总结

很早就想总结一下前段时间学习HALCON的心得,但由于其他的事情总是抽不岀时间。
去年有过一段时间的集中学习,做了许多的练习和实验,并对基于HDevelop的形状匹配算法的参数优化进行了研究,写了一篇《基于HDevelop的形状匹配算法参数的优化研究》文章,总结了在形状匹配过程中哪些参数影响到模板的搜索和匹配,又如何来协调这些参数来加快匹配过程,提高匹配的精度,这篇paper放到了中国论文在线了,需要可以去下载。
德国MVTec公司开发的HALCON机器视觉开发软件,提供了许多的功能,在这里我主要学习和研究了其中的形状匹配的算法和流程。
HDevelop开发环境中提供的匹配的方法主要有三种,即Component-Based、Gray-Value-Based、Shape-Based,分别是基于组件(或成分、元素)的匹配,基于灰度值的匹配和基于形状的匹配。
这三种匹配的方法各具特点,分别适用于不同的图像特征,但都有创建模板和寻找模板的相同过程。
这三种方法里面,我主要就第三种-基于形状的匹配,做了许多的实验,因此也做了基于形状匹配的物体识别,基于形状匹配的视频对象分割和基于形状匹配的视频对象跟踪这些研究,从中取得较好的效果,简化了用其他工具,比如VC++来开发的过程。
在VC下往往针对不同的图像格式,就会弄的很头疼,更不用说编写图像特征提取、模板建立和搜寻模板的代码呢,我想其中间过程会很复杂,效果也不一定会显著。
下面我就具体地谈谈基于HALCON的形状匹配算法的研究和心得总结。
1. Shape-Based matchi ng 的基本流程HALCON提供的基于形状匹配的算法主要是针对感兴趣的小区域来建立模板,对整个图像建立模板也可以,但这样除非是对象在整个图像中所占比例很大,比如像视频会议中人体上半身这样的图像,我在后面的视频对象跟踪实验中就是针对整个图像的,这往往也是要牺牲匹配速度的,这个后面再讲。
基本流程是这样的,如下所示:⑴首先确定岀ROI的矩形区域,这里只需要确定矩形的左上点和右下点的坐标即可,gen_recta ngle1()这个函数就会帮助你生成一个矩形,利用area_ce nter()找到这个矩形的中心;⑵然后需要从图像中获取这个矩形区域的图像,reduce_domain()会得到这个ROI ;这之后就可以对这个矩形建立模板,而在建立模板之前,可以先对这个区域进行一些处理,方便以后的建模,比如阈值分割,数学形态学的一些处理等等;⑶ 接下来就可以利用create_shape_model()来创建模板了,这个函数有许多参数,其中金字塔的级数由Numlevels指定,值越大则找到物体的时间越少,AngleStart和AngleExtent决定可能的旋转范围,AngleStep指定角度范围搜索的步长;这里需要提醒的是,在任何情况下,模板应适合主内存,搜索时间会缩短。
模板匹配及其类型
模板匹配及其类型
《模板匹配及其类型》
模板匹配是一种在计算机领域中常用的技术,用于在大规模的数据中查找与特定模式或模板相似的项。
它的核心思想是通过比较待匹配的数据与已知的模板之间的相似度,来确定是否存在匹配。
1. 字符串匹配:这是最常见的模板匹配类型,用于在文本数据中查找与特定字符串模式匹配的项。
例如,在一个文本文件中查找特定的单词或短语。
2. 图像匹配:在计算机视觉领域,模板匹配用于在图像中查找与特定图像模式相似的区域。
它可以用于对象识别、目标跟踪等任务。
3. 数据挖掘:在数据挖掘中,可以使用模板匹配来发现数据集中的模式或规律。
例如,通过比较不同数据集的特征,可以找到相似的数据集或模式。
4. 音频和视频匹配:在音频和视频处理中,可以使用模板匹配来识别特定的音频或视频模式。
它可以用于语音识别、音乐识别、视频内容分析等任务。
5. 生物信息学:在生物信息学领域,模板匹配用于在生物序列中查找相似的模式。
例如,在基因序列分析中,可以使用模板匹配来查找特定的基因或蛋白质序列。
总的来说,模板匹配是一种通用的技术,可以应用于各种领域和任务。
它的关键在于定义合适的模板和相似度度量方法,以准确地识别和匹配数据中的模式。
谢谢大家!。
halcon单目视觉模板匹配例子
在进行高质量、深度和广度兼具的文章撰写之前,我首先需要对您提出的主题进行全面评估和研究。
在本文中,我将按照您的要求,从简到繁地探讨“halcon单目视觉模板匹配例子”这一主题,以便您能更深入地理解。
在文章中,我会反复提及这一主题,并在总结回顾部分共享我的个人观点和理解。
请您耐心等待我的文章完成。
在深度了解halcon单目视觉模板匹配例子之前,我们需要先了解一些基础知识。
Halcon是一种先进的机器视觉库,它具有强大的图像处理和分析能力,可以应用于工业自动化、质量控制、医学影像等领域。
而单目视觉模板匹配则是Halcon中的重要功能之一,它能够在图像中找到指定模板的位置,从而实现对象识别和定位的功能。
通过模板匹配,我们可以实现自动化生产线上的零件检测、物体定位和跟踪等任务。
接下来,让我们以最简单的例子开始,来了解单目视觉模板匹配的基本原理。
假设我们有一张包含特定物体的模板图像,我们希望在另一张大图像中找到并定位该物体的位置。
这时,我们可以利用Halcon提供的模板匹配功能来实现这一目标。
我们需要在模板图像中提取出物体的特征,然后将其用于在大图像中进行匹配。
Halcon的模板匹配功能可以帮助我们快速准确地找到并定位物体的位置,实现自动化检测和定位的需求。
然而,现实中的应用场景往往更加复杂和多样化。
在工业生产线上,我们可能需要处理物体旋转、缩放、遮挡等情况。
这就需要我们对单目视觉模板匹配功能有更深入的理解和应用。
Halcon提供了丰富的参数和算法,可以帮助我们应对各种复杂情况。
通过设置旋转不变性参数,我们可以在一定范围内实现对旋转变换的兼容;通过使用多尺度匹配算法,我们可以处理物体尺度的变化;通过使用区域过滤器,我们可以处理部分遮挡的情况。
这些高级功能使得Halcon在工业自动化领域具有广泛的应用前景。
对于个人的理解和观点,我认为单目视觉模板匹配是机器视觉领域中一项非常重要的技术。
它可以帮助我们实现自动化生产和质量控制,提高生产效率和产品质量。
halcon——缺陷检测常用方法总结(模板匹配(定位)+差分)
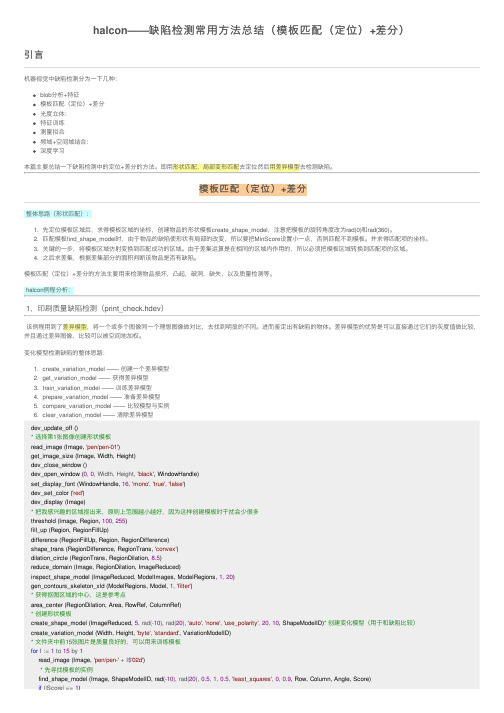
halcon——缺陷检测常⽤⽅法总结(模板匹配(定位)+差分)引⾔机器视觉中缺陷检测分为⼀下⼏种:blob分析+特征模板匹配(定位)+差分光度⽴体:特征训练测量拟合频域+空间域结合:深度学习本篇主要总结⼀下缺陷检测中的定位+差分的⽅法。
即⽤形状匹配,局部变形匹配去定位然后⽤差异模型去检测缺陷。
模板匹配(定位)+差分整体思路(形状匹配):1. 先定位模板区域后,求得模板区域的坐标,创建物品的形状模板create_shape_model,注意把模板的旋转⾓度改为rad(0)和rad(360)。
2. 匹配模板find_shape_model时,由于物品的缺陷使形状有局部的改变,所以要把MinScore设置⼩⼀点,否则匹配不到模板。
并求得匹配项的坐标。
3. 关键的⼀步,将模板区域仿射变换到匹配成功的区域。
由于差集运算是在相同的区域内作⽤的,所以必须把模板区域转换到匹配项的区域。
4. 之后求差集,根据差集部分的⾯积判断该物品是否有缺陷。
模板匹配(定位)+差分的⽅法主要⽤来检测物品损坏,凸起,破洞,缺失,以及质量检测等。
halcon例程分析:1,印刷质量缺陷检测(print_check.hdev)该例程⽤到了差异模型,将⼀个或多个图像同⼀个理想图像做对⽐,去找到明显的不同。
进⽽鉴定出有缺陷的物体。
差异模型的优势是可以直接通过它们的灰度值做⽐较,并且通过差异图像,⽐较可以被空间地加权。
变化模型检测缺陷的整体思路:1. create_variation_model —— 创建⼀个差异模型2. get_variation_model —— 获得差异模型3. train_variation_model —— 训练差异模型4. prepare_variation_model —— 准备差异模型5. compare_variation_model —— ⽐较模型与实例6. clear_variation_model —— 清除差异模型dev_update_off ()* 选择第1张图像创建形状模板read_image (Image, 'pen/pen-01')get_image_size (Image, Width, Height)dev_close_window ()dev_open_window (0, 0, Width, Height, 'black', WindowHandle)set_display_font (WindowHandle, 16, 'mono', 'true', 'false')dev_set_color ('red')dev_display (Image)* 把我感兴趣的区域抠出来,原则上范围越⼩越好,因为这样创建模板时⼲扰会少很多threshold (Image, Region, 100, 255)fill_up (Region, RegionFillUp)difference (RegionFillUp, Region, RegionDifference)shape_trans (RegionDifference, RegionTrans, 'convex')dilation_circle (RegionTrans, RegionDilation, 8.5)reduce_domain (Image, RegionDilation, ImageReduced)inspect_shape_model (ImageReduced, ModelImages, ModelRegions, 1, 20)gen_contours_skeleton_xld (ModelRegions, Model, 1, 'filter')* 获得抠图区域的中⼼,这是参考点area_center (RegionDilation, Area, RowRef, ColumnRef)* 创建形状模板create_shape_model (ImageReduced, 5, rad(-10), rad(20), 'auto', 'none', 'use_polarity', 20, 10, ShapeModelID)* 创建变化模型(⽤于和缺陷⽐较)create_variation_model (Width, Height, 'byte', 'standard', VariationModelID)* ⽂件夹中前15张图⽚是质量良好的,可以⽤来训练模板for I := 1 to 15 by 1read_image (Image, 'pen/pen-' + I$'02d')* 先寻找模板的实例find_shape_model (Image, ShapeModelID, rad(-10), rad(20), 0.5, 1, 0.5, 'least_squares', 0, 0.9, Row, Column, Angle, Score)if (|Score| == 1)if (|Score| == 1)* 使⽤仿射变换,将当前图像平移旋转到与模板图像重合,注意是当前图像转向模板图像vector_angle_to_rigid (Row, Column, Angle, RowRef, ColumnRef, 0, HomMat2D)affine_trans_image (Image, ImageTrans, HomMat2D, 'constant', 'false')* 训练差异模型train_variation_model (ImageTrans, VariationModelID)dev_display (ImageTrans)dev_display (Model)endifendfor* 获得差异模型get_variation_model (MeanImage, VarImage, VariationModelID)* 做检测之前可以先⽤下⾯这个算⼦对可变模型进⾏设参,这是⼀个经验值,需要调试者调整prepare_variation_model (VariationModelID, 20, 3)dev_set_draw ('margin')NumImages := 30* 可变模板训练完成后,我们终于可以进⼊主题,马上对所有图像进⾏缺陷检测,思想就是差分for I := 1 to 30 by 1read_image (Image, 'pen/pen-' + I$'02d')* 要注意做差分的两幅图像分辨率相同,当然也需要通过仿射变换把待检测的图像转到与模板图像重合* 先寻找模板的实例find_shape_model (Image, ShapeModelID, rad(-10), rad(20), 0.5, 1, 0.5, 'least_squares', 0, 0.9, Row, Column, Angle, Score) if (|Score| == 1)* 使⽤仿射变换,将当前图像平移旋转到与模板图像重合,注意是当前图像转向模板图像vector_angle_to_rigid (Row, Column, Angle, RowRef, ColumnRef, 0, HomMat2D)affine_trans_image (Image, ImageTrans, HomMat2D, 'constant', 'false')* 抠图reduce_domain (ImageTrans, RegionDilation, ImageReduced)* 差分(就是检查两幅图像相减,剩下的区域就是不同的地⽅了,与模板图像不同的地⽅就是缺陷)*这⾥可不能⽤difference做差分啊,halcon为变形模板提供了专门的差分算⼦:compare_variation_modelcompare_variation_model (ImageReduced, RegionDiff, VariationModelID)connection (RegionDiff, ConnectedRegions)* 特征选择:⽤⼀些特征来判断这幅图像印刷是否有缺陷,这⾥使⽤⾯积* 其实可以考虑利⽤区域⾯积的⼤⼩来判断缺陷的严重程度,这⾥就不过多讨论了select_shape (ConnectedRegions, RegionsError, 'area', 'and', 20, 1000000)count_obj (RegionsError, NumError)dev_clear_window ()dev_display (ImageTrans)dev_set_color ('red')dev_display (RegionsError)set_tposition (WindowHandle, 20, 20)if (NumError == 0)dev_set_color ('green')write_string (WindowHandle, 'Clip OK')elsedev_set_color ('red')write_string (WindowHandle, 'Clip not OK')endifendifif (I < NumImages)disp_continue_message (WindowHandle, 'black', 'true')stop ()endifendfor* 结语:如果发现前⾯作为训练变形模板的良好图像也被判定为NG,* 可以调整prepare_variation_model参数* 或者调整select_shape特征筛选的标准相关算⼦分析:create_variation_model(创建⼀个差异模型)create_variation_model(Width, Height, Type, Mode ,ModelID)//创建⼀个ID为ModelID,宽为Width,⾼为Height,类型为Type的差异模型参数参数Mode决定了创建标准图像和相应的变化图像的⽅法。
模版匹配的目的
模版匹配的目的
模版匹配是一种在计算机科学和人工智能领域中广泛应用的技术,它可以帮助
我们快速有效地识别和匹配特定的模式。
在这篇文章中,我们将探索模版匹配的目的,以及它在不同领域中的应用。
首先,模版匹配的目的是为了帮助我们找到特定的模式或规律。
通过使用模版
匹配技术,我们可以在大量的数据中快速准确地找到我们感兴趣的目标,从而节省时间和精力。
这种技术在信息检索、图像识别、语音识别等领域都有着重要的应用。
其次,模版匹配的目的是为了提高工作效率和准确性。
在日常生活中,我们经
常需要对大量的数据进行处理和分析,而模版匹配技术可以帮助我们快速地完成这些工作,同时也能够减少人为的错误。
这对于企业的数据管理、市场分析、产品设计等方面都有着重要的意义。
此外,模版匹配的目的还在于帮助我们发现隐藏在数据背后的规律和趋势。
通
过对数据进行模版匹配分析,我们可以发现数据之间的关联性和相互影响,从而为我们提供更深入的洞察和更准确的预测。
这对于科学研究、商业决策、金融分析等领域都具有重要的意义。
总的来说,模版匹配的目的是为了帮助我们更快速、更准确地找到目标,提高
工作效率和准确性,发现数据背后的规律和趋势。
随着人工智能和大数据技术的不断发展,模版匹配技术将会在更多的领域得到应用,为我们的工作和生活带来更多的便利和可能性。
halcon多模板匹配方法

halcon多模板匹配方法【原创实用版3篇】目录(篇1)1.引言2.Halcon 模板匹配方法概述3.Halcon 多模板匹配方法4.模板匹配过程中的参数优化5.总结与展望正文(篇1)一、引言在计算机视觉领域,模板匹配是一种常用的图像处理方法,其主要目的是通过比较图像间的相似性,找到匹配的图像区域。
在众多模板匹配软件中,Halcon 是一款由德国 MVTec 公司开发的机器视觉开发软件,它提供了许多实用的功能,特别是在形状匹配方面有着显著的优势。
本文将重点介绍 Halcon 中的多模板匹配方法。
二、Halcon 模板匹配方法概述Halcon 中的模板匹配方法主要包括基于组件(或成分、元素)的匹配(component-based)、基于灰度值的匹配(gray-value-based)和基于形状的匹配(shape-based)三种。
这三种匹配方法各具特点,分别适用于不同的图像特征。
在实际应用中,可以根据需要选择合适的匹配方法。
三、Halcon 多模板匹配方法在实际应用中,往往需要同时处理多个模板,以提高匹配的准确性和速度。
Halcon 提供了多模板匹配的方法,可以同时对多个模板进行处理。
这种方法主要通过以下几个步骤实现:1.读入图片并选取 ROI(感兴趣区域)。
2.对 ROI 进行预处理,如阈值处理、连接处理和选择形状等操作。
3.提取模板区域,创建模板并保存。
4.载入已保存的模板,进行模板匹配。
5.根据匹配结果,对图像进行处理,如标注、分割等。
四、模板匹配过程中的参数优化在模板匹配过程中,有许多参数会影响到匹配的精度和速度,如阈值、连接方式、形状选择等。
为了提高匹配效果,需要对这些参数进行优化。
在 Halcon 中,可以通过实验和观察来选择合适的参数,也可以借助一些优化算法来自动调整参数,以达到最佳的匹配效果。
五、总结与展望Halcon 中的多模板匹配方法具有较强的实用性和灵活性,可以满足不同场景下的图像处理需求。
halcon 模板匹配行列坐标按列排序算子
1. 概述说到机器视觉领域,模板匹配算法是一种常用且有效的方法。
而Halcon作为一种强大的机器视觉开发工具,其模板匹配行列坐标按列排序算子是其重要的功能之一。
本文将从模板匹配的基本原理入手,详细介绍Halcon中模板匹配行列坐标按列排序算子的原理、应用和优势。
2. 模板匹配的基本原理模板匹配是一种在机器视觉领域中常用的算法,其基本原理是在一幅图像中寻找与给定模板最相似的区域。
在Halcon中,模板匹配主要使用灰度图像和边缘图像作为输入,通过计算图像之间的相关性来实现模板匹配的过程。
3. Halcon中模板匹配行列坐标按列排序算子的原理在Halcon中,模板匹配行列坐标按列排序算子是用于在给定的区域内寻找与输入模板最匹配的位置。
该算子主要通过计算输入模板与图像区域之间的相似性来实现匹配过程。
具体而言,该算子会对输入模板和图像区域进行像素级的比较,并根据比较结果排序,最终找出相似度最高的位置。
4. 算子的应用模板匹配行列坐标按列排序算子在工业视觉、医学影像和安防监控等领域有着广泛的应用。
在工业视觉领域,该算子可以用于检测产品表面的缺陷或定位产品的位置。
在医学影像方面,该算子可以帮助医生快速准确地定位病灶部位。
在安防监控领域,该算子可以用于实现人脸识别、车牌识别等功能。
5. 算子的优势相较于传统的模板匹配算法,模板匹配行列坐标按列排序算子在匹配速度和匹配精度上有着明显的优势。
该算子在匹配过程中能够充分利用计算机的并行计算能力,从而大大提高匹配的效率。
该算子还可以对模板和图像区域进行自适应的缩放和旋转,使其具有更好的适应性和鲁棒性。
6. 结语Halcon中模板匹配行列坐标按列排序算子是一种强大的模板匹配算法,具有广泛的应用前景和显著的优势。
相信随着机器视觉技术的不断进步,该算子在实际应用中将发挥越来越重要的作用,为各行各业带来更多的便利和效益。
7. 实际应用案例模板匹配行列坐标按列排序算子在实际应用中有着丰富的案例。
机器视觉目标识别方法解析:Blob分析法、模板匹配法、深度学习法
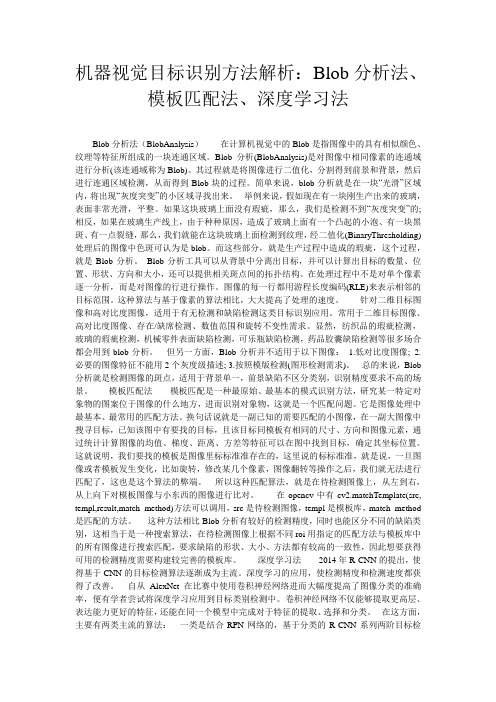
机器视觉目标识别方法解析:Blob分析法、模板匹配法、深度学习法Blob分析法(BlobAnalysis)在计算机视觉中的Blob是指图像中的具有相似颜色、纹理等特征所组成的一块连通区域。
Blob分析(BlobAnalysis)是对图像中相同像素的连通域进行分析(该连通域称为Blob)。
其过程就是将图像进行二值化,分割得到前景和背景,然后进行连通区域检测,从而得到Blob块的过程。
简单来说,blob分析就是在一块“光滑”区域内,将出现“灰度突变”的小区域寻找出来。
举例来说,假如现在有一块刚生产出来的玻璃,表面非常光滑,平整。
如果这块玻璃上面没有瑕疵,那么,我们是检测不到“灰度突变”的;相反,如果在玻璃生产线上,由于种种原因,造成了玻璃上面有一个凸起的小泡、有一块黑斑、有一点裂缝,那么,我们就能在这块玻璃上面检测到纹理,经二值化(BinaryThresholding)处理后的图像中色斑可认为是blob。
而这些部分,就是生产过程中造成的瑕疵,这个过程,就是Blob分析。
Blob分析工具可以从背景中分离出目标,并可以计算出目标的数量、位置、形状、方向和大小,还可以提供相关斑点间的拓扑结构。
在处理过程中不是对单个像素逐一分析,而是对图像的行进行操作。
图像的每一行都用游程长度编码(RLE)来表示相邻的目标范围。
这种算法与基于像素的算法相比,大大提高了处理的速度。
针对二维目标图像和高对比度图像,适用于有无检测和缺陷检测这类目标识别应用。
常用于二维目标图像、高对比度图像、存在/缺席检测、数值范围和旋转不变性需求。
显然,纺织品的瑕疵检测,玻璃的瑕疵检测,机械零件表面缺陷检测,可乐瓶缺陷检测,药品胶囊缺陷检测等很多场合都会用到blob分析。
但另一方面,Blob分析并不适用于以下图像:1.低对比度图像; 2.必要的图像特征不能用2个灰度级描述; 3.按照模版检测(图形检测需求)。
总的来说,Blob 分析就是检测图像的斑点,适用于背景单一,前景缺陷不区分类别,识别精度要求不高的场景。
机器视觉的基本原理与应用

机器视觉的基本原理与应用机器视觉是一种模拟人类视觉系统的技术,利用计算机和相关算法来模拟和实现图像的获取、处理、分析和理解。
它主要基于图像处理、模式识别和人工智能等领域的技术,广泛应用于工业自动化、智能监控、医疗诊断、无人驾驶等众多领域。
本文将介绍机器视觉的基本原理和应用。
一、基本原理1. 图像获取机器视觉的第一步是通过摄像头或其他图像传感器获取图像。
这些图像可以是静态图像,也可以是视频流。
在图像获取过程中,需要考虑光照、视角、噪声等因素对图像质量的影响。
2. 图像预处理获取到的图像通常需要进行预处理,以提高后续处理的效果。
预处理包括消除噪声、调整对比度、增强边缘等操作。
常用的预处理技术包括滤波、直方图均衡化和边缘检测等。
3. 特征提取特征提取是机器视觉中的关键步骤,它将原始图像转换为能够描述目标或区域的特征向量。
这些特征可以是图像的颜色、纹理、形状等。
常用的特征提取算法有边缘提取、角点检测和SIFT等。
4. 物体检测与识别物体检测与识别是机器视觉的核心任务之一。
它通过比较图像的特征与已知模型或特征数据库中的数据进行匹配,从而实现对目标物体的检测和识别。
常用的物体检测与识别算法有模板匹配、支持向量机和卷积神经网络等。
5. 目标跟踪与定位目标跟踪与定位是机器视觉的另一个重要任务,它用于在连续的图像序列中追踪和定位目标物体。
目标跟踪与定位可以通过运动模型、特征匹配和背景建模等方法来实现。
二、应用领域1. 工业自动化机器视觉在工业自动化中具有广泛的应用。
例如,在生产线上,机器视觉可以用于产品质量检测、缺陷检测和尺寸测量等。
它能够快速、准确地完成对产品的检测和判断,提高生产效率和质量。
2. 智能监控机器视觉在智能监控领域发挥着重要作用。
它可以通过图像分析和识别技术,实现对监控画面中的人员、车辆和行为进行监测和分析。
这有助于提高监控系统的智能化水平,提供更加安全和高效的监控服务。
3. 医疗诊断机器视觉在医疗诊断中有着广泛的应用前景。
halcon模板匹配算法

Halcon模板匹配算法1. 算法概述模板匹配是一种常用的计算机视觉算法,它能够在图像中寻找与给定模板最相似的区域并进行定位。
Halcon是一款强大的机器视觉开发工具,提供了丰富的模板匹配功能,可以用于各种应用领域,如工业自动化、品质检测等。
2. 原理介绍Halcon模板匹配算法主要基于灰度图像进行处理。
其基本原理是通过将待匹配图像与模板图像进行相似度计算,找到最相似的区域,并输出其位置信息。
具体步骤如下: - 加载图像和模板:首先需要加载待匹配的图像和用于匹配的模板图像。
- 预处理:对加载的图像和模板进行预处理,如灰度化、滤波等。
这一步旨在提取出关键特征以便进行后续计算。
- 创建模板:根据预处理后的模板图像,使用Halcon提供的函数创建一个模板对象。
- 匹配:使用创建好的模板对象对待匹配的图像进行匹配操作。
Halcon提供了多种匹配函数,如find_shape_model、find_scaled_shape_model等,可以根据实际需求选择合适的函数。
- 结果输出:匹配完成后,可以获取到匹配的结果,如匹配区域的位置、相似度等信息。
根据这些信息可以进行后续的处理和判断。
3. 算法优势Halcon模板匹配算法具有以下几个优势: - 高效性:Halcon采用了高度优化和并行化的算法实现,能够在短时间内完成大量图像的匹配任务。
- 鲁棒性:Halcon提供了多种参数调整选项,能够适应不同场景下的光照变化、尺度变化等因素对匹配结果的影响。
- 易用性:Halcon提供了丰富的图形界面和编程接口,使得用户可以方便地进行算法调试和参数设置。
- 可扩展性:Halcon支持多种图像处理操作和其他机器视觉算法,可以与其他功能模块进行组合使用,满足复杂应用需求。
4. 应用场景Halcon模板匹配算法广泛应用于各种工业自动化和品质检测场景中。
以下是一些常见应用场景: - 产品质检:利用模板匹配算法可以对产品外观进行检测,如检测产品是否存在缺陷、是否符合规定的尺寸等。
基于模板匹配的机器视觉话机检测系统

文章 编号 : 1 0 0 7 — 1 4 2 3 ( 2 0 1 3 ) 3 0 — 0 0 6 3 — 0 3
D OI : 1 0 . 3 9 6 9 6 . i s s n . 1 0 0 7 — 1 4 2 3 . 2 0 1 3 . 3 0 . 0 1 6
基 于模 板 匹配 的机器视 觉话机检测 系统
n5
相应模式 的处理方法 模板 匹配算法需 要两幅图像 . 原 图像 S o u r c e i m a g e ( I ) 和模 板 图像 T e m p l a t e i m a g e ( T ) ,
在 原 图 像 中 滑 动 寻 找 各 个 位 置 与 模 板 图像 的相 似 度 . 根 据 一 幅 已 知 的小 图 像 “ 特 征 图像 ” T在 一 幅 大 图 像 I
取 产 品 图像 和 检 测 产 品 , 可视 化 效 果 好 。 关 键 词 :机 器视 觉 ;模 板 匹 配 ;话机 检 测
0 引
言
特 征 块 模 板 匹 配 模 型 的基 本 思 想 是 :将 特 征 块 引 入模板匹配 中, 先 对 标 准 模 板 和样 本 模 板 都 进 行 改 造 ,
辅助矩 阵中各像素 的值来确定矩阵 中心点 的取值
n3 n2 nl
像进行 相关处理 . 最后 将处理结果进 行输 出显示 . 供 用
户 对 产 品进 行 判 断
n
p
n6
r i o
I b
1 模 板 匹 配算 法 在 智 能 检 测 系统 中 的应 用
模 板 匹 配 算 法 是 根 据 已 知 模 式 到 另 一 幅 图 中 寻 找
侯 海 燕
( 无 锡 科 技 职 业 学 院软 件 与 服 务外 包学 院 , 无锡 2 1 4 0 2 8 ) 摘 要 :针 对 流 水 线 产 品 的 自动 检 测 需 求 的 不 断提 升 ,使 用模 板 匹 配 算 法 实现 智 能话 机 检 测设 备 , 并进 行 软 件 仿 真 , 该 系统 用 于检 测 话 机 按 键 的 错 装 、 漏 装 以及 字符 印刷 错 误 等 问题 , 实时 获
机器人视觉技术的算法与应用
机器人视觉技术的算法与应用随着科技的不断发展,机器人在我们生活中扮演的角色越来越重要。
而在机器人的技术应用中,视觉技术更是发挥着至关重要的作用。
视觉算法和技术已经迅速地发展,可以被应用于许多领域。
本文将介绍机器人视觉技术的算法及其应用。
一、机器视觉技术的算法和工作原理机器视觉技术是一种尝试使计算机系统拥有视觉能力的技术。
采用机器视觉技术的系统通常由一个摄像头、一台计算机或单板计算机以及图像处理算法组成。
机器视觉技术中的一些关键算法包括:1. 图像处理算法图像处理算法是机器视觉技术中最基本、最常用的算法之一。
该算法针对输入的图像数据进行某些操作,例如图像增强、滤波、边缘检测、特征检测等。
图像处理算法通常包括灰度化、二值化、形态学处理等步骤。
2. 特征提取算法特征提取算法是将图像中的信息进行分析和抽象的过程。
该算法通常用于在图像中找到一些特殊的区域或对象,并计算它们的数字特征。
特征提取算法通常包括边缘检测、直线检测、圆检测等。
3. 目标检测算法目标检测算法是机器视觉技术中的一种高级算法,用于检测图像中的目标或对象,例如人脸、车辆等。
目标检测算法通常包括模板匹配、卷积神经网络等。
以上三种算法是机器视觉中最常用的算法之一。
在实践中,通常会将这些算法结合使用,以达到更好的效果。
二、机器视觉技术的应用机器视觉技术的应用非常广泛,包括但不限于以下领域:1. 工业自动化机器视觉技术在工业自动化中的应用越来越广泛。
例如,在电子工厂生产线上,机器视觉系统可以用于检测电子元件的正确放置、检测成品的质量等。
2. 机器人机器人的视觉能力是其具备人工智能的一部分,应用机器视觉技术可以改善其自主导航、物体识别以及协作等方面的能力。
例如,在清理灾后建筑或者高危区,机器视觉技术可以发挥巨大的作用。
3. 家庭服务机器人随着人口老龄化加剧,家庭服务机器人需求量越来越大。
机器视觉技术可以被用于帮助机器人辨别物体和远程控制家中电器等方面。
halcon中3d模板匹配案例
【主题】Halcon中3D模板匹配案例【内容】1. Halcon介绍Halcon是由德国MVTec开发的一款工业视觉软件,广泛用于机器视觉领域中。
它提供了丰富的图像处理和分析工具,特别在模板匹配和3D视觉方面表现突出。
本文将以Halcon中3D模板匹配技术为案例,介绍其在工业应用中的具体应用。
2. 3D模板匹配的原理3D模板匹配是利用已知的三维对象模型和场景中的三维数据进行匹配,以实现对象的定位、识别等目的。
在Halcon中,通过将场景中的三维数据和已知的3D对象模型进行比对,计算出他们之间的相似程度并得出匹配结果。
这一过程需要通过摄像机进行图像采集并进行图像处理分析,以获取三维数据用于匹配。
3. Halcon 3D模板匹配的优势Halcon在3D模板匹配方面具有以下几个优势:- 高度灵活性:Halcon的3D模板匹配算法支持对于不同光照条件、姿态变化、噪声影响下的匹配,具有较高的鲁棒性。
- 高精度:Halcon利用先进的3D数据处理算法,能够实现对3D模型和场景的精准匹配,提高了匹配的准确性。
- 多样化应用:Halcon的3D模板匹配技术可以广泛应用于工业自动化、机器人视觉、智能制造等领域,为这些领域的发展提供了强有力的支持。
4. Halcon中3D模板匹配案例分析以汽车零部件的检测为例,通过Halcon的3D模板匹配技术,可以实现对汽车零部件的定位和识别。
具体过程如下:- 利用工业相机对汽车零部件进行拍摄,获取三维数据。
- 利用Halcon的3D模板匹配功能,对已知的汽车零部件模型进行建模,并存储为模板。
- 将获取的汽车零部件的三维数据与模板进行匹配,得出匹配结果。
- 根据匹配结果,实现对汽车零部件的定位、识别等操作。
5. Halcon中3D模板匹配案例效果展示通过Halcon的3D模板匹配技术,实现了对汽车零部件的自动识别和定位。
对于工业生产线而言,这意味着大大提高了生产效率和产品质量,同时减少了人工操作的繁琐和误差。
模板匹配算法在半导体设备中的应用
设 模 板 图像 的 点集 P = ( r i , C i ) ,图像 中各 点关
收 稿 日期 : 2 0 1 2 . 1 0 . 2 5
线添加一套类似人眼的视觉系统。其原理是 由计算
机 或 图像 处理 器 以及相 关 的设备来 模拟 人 的视觉 行 为, 完成得 到 人 的视 觉 系统所 得到 的信 息 。 许 多 半导 体 设 备 都 使 用 到 机 器 视 觉 系 统 技 术 来 进 行 产 品制 造, 如粘 片机 的芯 片粘 贴位置 ; 划 片机 的芯 片划切 位 置; 键合 机 的焊线位 置 ; 这些 设备 的位 置定位 识 别系
信息, 而 相 似 度 决 定 了 匹配 时 的相 关特 性 。
特 征 空 间 计算 : 首先 , 使 用 边 缘 算 子提 取 模 板
图像 和 待 匹配 图像 的边 缘 灰 度 ,然 后 计 算 边 缘 得 到 每 个 点 关联 的方 向 向量 , 即 为特 征 空 间 。
相似 度 量则 是用 来 衡量 和判 断 图像 匹配 结 果 。
1 半 导 体 机 器 视 觉 系统 构 成
机器 视 觉系统 的主 要 目的是给 机器 或 自动 生产
产 生许多新兴学科 。 机 器 视 觉 就 是 其 中之 一 , 机 器 视 觉 又 称 计 算机 视 觉 ,是 使 用 计 算 机 代 替 人 眼 来 做 测量和判断。 为 了满 足 市 场 的需 求 , 多 数 半 导 体 设 备 已经 从手 动 转 型 为 半 自动 或 全 自动 ;这 样 就 扩 大机 器 视 觉技 术 在众 多 半 导 体 设 备 中 的应 用 。 本 文 主 要 介 绍 基 于 形 状 和 灰 度 的 匹配 算 法 在 半 导 体 封 装 设 备 中 的 应 用 ,并 对 这 两 种 算 法 的 各 自优 缺 点进行分析和讨论 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
模板匹配典型算法原理
01 模板w开始位置在图像f的左上角
当w的中心位于f的边界上时,围绕f的边界需要进行填充。
填充通常
被限制为模板宽度的一半。
02 模板从左上角向右下角开始移动
每次移动一个像素的位置,过程中可以得到模板和图像各位置间的相似度。
03 生成结果图像
相似度量值保存到结果图像中. 在结果图像中的每个位置都包含匹配度量值。
04 找到匹配位置
根据所用的匹配算法不同,对结果图像进行处理分析,找到匹配位置。
基于灰度值的模板匹配算法。
基于边缘的模板
匹配算法
基于形状的模板
匹配算法
Gray-Value-Based Template Matching
基于灰度值的模板匹配
基于灰度值的模板匹配—基本概念
相似度量
相似度量S是一个函数,函数中的参数包括:
①模板中各点的灰度值t(r,c);
②模板感兴趣区域移动到图像当前位置时感兴趣区域
中的灰度值f(r+u,c+v);
然后基于这些灰度值计算一个标量值作为相似度量。
01 S A D :计算模板与图像之间差值的绝对值总和
02
S S D :计算模板和图像之间差值的平方和
问题
●在光照保持不变的情况下,SAD 和SSD 相似度量的结果非常好。
●当光照发生变化,甚至在图像中存在相同物体的情况下,他们都将返回非常大的结果!
基于灰度值的模板匹配——相似度量方法—SAD,SSD (Sum of absolute/squared difference )
?
03
N C C :归一化互相关系数
基于灰度值的模板匹配——相似度量方法—NCC (Normalized cross--correlation)
(,)(,)(,)(,)
u v T
c r c t u v f r u c v ∈=
++∑
结果
•基于灰度值的模板匹配方法原理简单。
•
在良好的光照条件下可以得到很满意的匹配
结果。
Advantages
优点 Disadvantages
缺点 •
受光照影响大,抗干扰性不强。
•图像存在遮挡、部分隐藏、信息缺失、混乱时 不能正确找到目标物体。
01
02
Edge matching
基于边缘的模板匹配算法
基于边缘的模板匹配算法
1
2
3
使用原始边缘点或者增加每个点的一些特性。
将边缘分割为多个几何基元,然后匹配这些几何基元。
得到边缘上的突变点,然后匹配这些突变点。
三种策略
平移情况下的均方边缘距离可表示为:
其中,T 表示模板边缘区域,d(r, c) 表示边缘提取后待搜索图像背景的距离变换。
缺点:图像边缘有遮挡时,返回的距离将会非常大。
棋盘距离—8连通
街区距离--4连通欧氏距离
(三)在距离图上用上述两个掩码分别从左上到右下和右下到左上进行逐行扫描,将掩码覆盖区域中的距离值与掩码中 相应位置上的距离值求和,然后从掩码的所有计算结果中选择最小的值作为当前像素的距离值。
1 1
1
1
2 1 2 1 0 1 2
1
2
原图街区距离
棋盘距离欧氏距离
h (T, E) 表示了模板边缘点与最近图像边缘点之间的最大距离;
h (E, T) 的定义与h (T, E) 互为对称,它表示了图像边缘点与最近模板边缘点之间的最大距离。
Hausdorff距离是由这两个距离的最大值决定。
匹配过程
将模板沿着图像逐像素扫描,模板每移动一次就会得到一个当前的Hausdorff距离。
当模板中的边缘点与图像中的边缘点非常接近,且图像中的边缘点与模板中的边缘点也非常接近时,会得到一个最小的Hausdorff距离,此时为最优匹配。
改进
当图像中出现遮挡情况下算法效果不佳的主要原因是由于在计算h (T, E) 时采用了最大距离。
如果用第k 大距离代替最大距离,Hausdorff距离将对100 / % k n 的遮挡可靠,其中n表示模板边缘区域中像素点的数量。
尽管改进的Hausdorff距离能够解决遮挡和混乱带来的问题,但是当遮挡部分较大时,该方法会找到较多的错误实例。
此外由于Hausdorff距离的计算量较大,这使得算法的实时性比较差,对于那些实时性要求较高的在线系统该方法往往不能满足。
R-Table
上面所说的所有基于边缘的算法都存在一个缺陷,就是它们都需要在图像中提取出边缘。
这就导致目标识别算法只能够适用于非常小范围的光照变化。
如果降低对比度,提取到的边缘点就越来越少,更多的遮蔽也会造成相似的影响。
缺陷
总结
基于边缘点的模板匹配算法
Shape-based
基于形状的模板匹配
相似度量 S :
,,2222
11,,11||||||||i i i i
i i
i i
T
n
n
i i r r c c r r c c i q p
i i i q p i i r r c c r r c c t v u w d e
s n d e n t u v w +++++==++++++==++∑∑
归一化后的相似度量 S :
,,11
11i i i i
n n
T
i q p i r r c c i r r c c i i s d e t v u w n n +++++====+∑∑当图像中存在遮挡的情况,遮挡部分像素点的梯度向量的模非常小,它与模板相应位置梯度向量的内积也是一个非常小的值,几乎不影响总和;当图像中存在混乱的情况,混乱部分对应的模板相应位置梯度向量的模非常小,它们的内积仍然不影响总和。
然而,公式提供的相似度量仍不能真正的满足光照变化的情况。
这是因为梯度向量的模取决于图像的亮度:当图像较亮时,梯度向量的模较大;当图像较暗时,梯度向量
结果
由于梯度向量进行了归一化,该相似度量将返回一个小于等于1的值。
当 s=1时,说明模板与图像之间一一对应;
当图像中目标物体的50%被遮挡时,该相似度量将不会超过0.5。
因此,它可以让用户选择一个直观的阈值来决定具体的匹配对象。
对基于形状的模板匹配算法测试后显示基于形状的模板匹配算法在存在严重遮挡、混乱或非线性光照变化的情况下实现了非常高的识别率。
优点
总结
pyramid
图像金字塔
图像金字塔
在构建图像金字塔的过程中,速度是非常重要的,通常优先采用
2*2 的均值滤波器平滑图像,也就是说求2*2区域中的所有像素的平均
灰度值。
当在金字塔的最高层搜索到相应的模板实例时,将匹配点的坐标乘
以2,映射到金字塔的下一层。
此外,由于金字塔的最高层目标物体的灰度值可能发生实质性的变
化,这要求在匹配金字塔的较高层时应使用较为宽松的匹配阈值。
模板匹配算法
The End。