InSA_R相位解缠最小范数算法的研究
InSAR相位解缠算法的比较

InSAR相位解缠算法的比较亓宁轩【期刊名称】《测绘与空间地理信息》【年(卷),期】2016(039)003【摘要】相位解缠作为合成孔径雷达干涉测量( InSAR, Interferometric Synthetic Aperture Radar )中一个关键的步骤,为获取地形高程提供了基础。
相位解缠的质量将直接影响着DEM生成的质量。
对现有的几类算法进行实验分析,并对解缠结果的质量进行比较,分析其精确性。
结果表明:统计耗费网络流算法具有较好的解缠连续性以及较高的精度,可以获得一个较优的全局解。
%Phase unwrapping is one of the most crucial steps in InSAR processing, which makes people get the information of the sur-face.At the same time, the suitable phase unwrapping algorithm influences the final result, at a large degree.We used the data of I-ran to test these algorithms, and finally gave a conclusion that Snaphu algorithm makes full allowance of the information in coherence map, obtains better global optima, and has a good continuity.It also can directly process the area of interest.【总页数】4页(P199-201,204)【作者】亓宁轩【作者单位】山东科技大学测绘科学与工程学院,山东青岛266510【正文语种】中文【中图分类】P225.1【相关文献】1.基于蚁群算法的InSAR相位解缠算法 [J], 魏志强;金亚秋2.基于改进模拟退火遗传算法的 INSAR 相位解缠算法 [J], 于向明;孙学宏;刘丽萍;张成3.相位分块与拟合法结合的InSAR相位解缠算法 [J], 马靓婷; 卢小平; 余振宝4.适用于高噪声区域的InSAR相位解缠算法研究 [J], 刘英;卢小平;高延东;余振宝;冯豪杰5.InSAR相位解缠算法比较及误差分析 [J], 许才军;王华因版权原因,仅展示原文概要,查看原文内容请购买。
一种枝切法和质量图相结合的InSAR相位解缠算法

一种枝切法和质量图相结合的InSAR相位解缠算法王霖郁;李辉【摘要】To overcome the shortcomings that it is easy to form a separate island without unwrapping caused by the traditional path integral phase unwrapping method, a new algorithm of InSAR phase unwrapping based on the tradi⁃tional path integral phase unwrapping and quality map method was proposed. This new algorithm firstly applied branch⁃cut method to unwrap large⁃scale wrapped phase, then unwrap the remainder of the phase of separate islands by quality map, using heap sort algorithm to increase its operating efficiency. Simulation and experimental results show that the proposed algorithm can overcome the shortcomings of the branch cut method, which can not only get the complete phase unwrapping, but also surmount the difficulty in stopping the diffusion of phase unwrap⁃ping error caused by the quality map method. In actual test and simulation, the method is proven to have both char⁃acteristics of fastness in unwrapping of path integral and effectiveness in phase unwrapping of quality map method, and meet the requirement of unwrapping large scale wrapping phase, having higher precision by comparison with other algorithms.%针对传统的基于残差点的路径积分相位展开方法对于相干性差、信噪比小的区域,容易形成一个个独立的孤岛而无法解缠的缺陷,提出一种枝切法和质量图相结合的InSAR相位解缠的新算法。
InSAR相位解缠方法研究

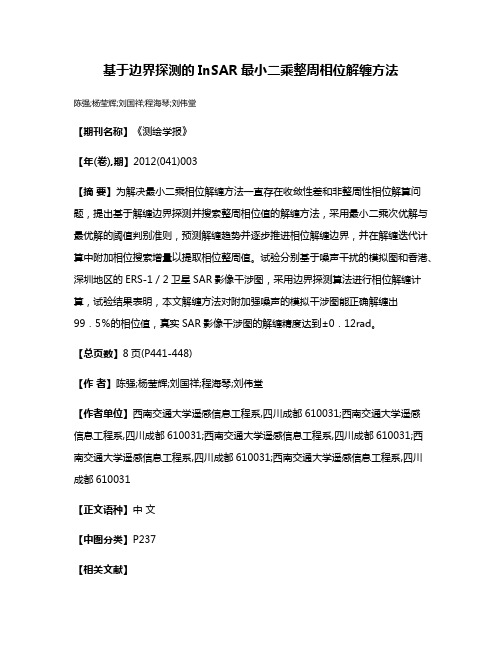
(a)模拟地形2D图(b)去平前于涉相位图(c)去平后干涉相何图图3.3干涉相位图去平地效应仿真从图3.3(b)可以看出,由于平地效应的影响,初始的干涉相位图条纹紧密,不能反映实际地形的高程变化,而进行平地效应去除后,从图3.3(c)便可以很清晰的看出地形的大致结构了。
此方法简单快速,而且不需要太多的额外信息,具有一定的实用性。
3.12干涉相位图的滤波降噪干涉相位估计与滤波是继图像配准后干涉数据处理的又一重要环节。
若相位图噪声十分严重,将会导致后续的相位展开无法进行或显著降低数字高程图的精度。
为了确保干涉相位图的可靠性,必须在保持干涉条纹结构信息和图像空间分辨率的前提下对干涉噪声进行有效地抑制。
干涉相位图的噪声主要包括:干涉SAR系统的空问去相关、时间去相关等因素引发的噪声、sAR图像的相干斑噪声、由雷达系统本身引起的热噪声。
传统干涉相位图滤波方法一般采用均值滤波和中值滤波。
均值滤波的基本思想是:取以当前点为中心的滑动窗口,以该窗口的平均值作为当前点新的灰度值。
由于滤波是针对复数干涉图进行的,故而均值滤波实际上相当于多视处理。
滤波窗口越大,干涉相位的方差减小越明显,相位图越清晰,但空间分辨率的损失越大,干涉条纹变得越模糊,特别地当窗口过大时图像高频成分损失过大,干涉条纹边缘处的细节遭到严重破坏,反而影响了相位解缠的精度。
中值滤波的基本思想是:在以当前点为中心的包含奇数个像素的窗口中,将各点灰度值由大到小排序,将位于币中间的灰度值作为窗口中心像素的输出值。
中值滤波属于非线性滤波,它的主要优点是能够去掉孤立脉冲噪声,它不受一两个,甚至多个噪声点的影响,能更好地反应原灰度分布特性。
然而中值滤波在对二维图像处理中往往破坏图像的细微几何结构,例如细线、尖锐的边角等,经过滤波后可能会丢失。
总之,传统的滤波方法在处理条纹图时,存在以下矛盾:为了达到理想的滤波效果,选取较大滤波窗口,但同时模糊了相位条纹,即把部分条纹信息也滤掉了;或者为了减少模糊效应,不得不将低通滤波器的门限提高,这样又使大量噪声也口=一arctan生.(3.1.19)a3由上式可知,条纹方向是在(一万,石】之间连续取值的,而实际应用中,由于曰与口±石是相同的,因此,条纹方向图只需在(一石,2,万/2】范围内取值即可。
基于边界探测的InSAR最小二乘整周相位解缠方法
基于边界探测的InSAR最小二乘整周相位解缠方法陈强;杨莹辉;刘国祥;程海琴;刘伟堂【期刊名称】《测绘学报》【年(卷),期】2012(041)003【摘要】为解决最小二乘相位解缠方法一直存在收敛性差和非整周性相位解算问题,提出基于解缠边界探测并搜索整周相位值的解缠方法,采用最小二乘次优解与最优解的阈值判别准则,预测解缠趋势并逐步推进相位解缠边界,并在解缠迭代计算中附加相位搜索增量以提取相位整周值。
试验分别基于噪声干扰的模拟图和香港、深圳地区的ERS-1/2卫星SAR影像干涉图,采用边界探测算法进行相位解缠计算,试验结果表明,本文解缠方法对附加强噪声的模拟干涉图能正确解缠出99.5%的相位值,真实SAR影像干涉图的解缠精度达到±0.12rad。
【总页数】8页(P441-448)【作者】陈强;杨莹辉;刘国祥;程海琴;刘伟堂【作者单位】西南交通大学遥感信息工程系,四川成都610031;西南交通大学遥感信息工程系,四川成都610031;西南交通大学遥感信息工程系,四川成都610031;西南交通大学遥感信息工程系,四川成都610031;西南交通大学遥感信息工程系,四川成都610031【正文语种】中文【中图分类】P237【相关文献】1.一种残差点退化的四向最小二乘InSAR相位解缠算法 [J], 王正勇;朱挺;何小海;罗代升2.InSAR相位解缠最小二乘算法的研究 [J], 孙龙;胡茂林;张长耀3.InSAR最小二乘相位解缠算法 [J], 刘保伟;张廷新;欧祥荣4.InSAR最小二乘相位解缠权重确定的一种新方法 [J], 刘伟科;刘国林5.基于克里金插值和Chan-Vese模型边界探测的InSAR相位解缠方法 [J], 王升; 朱煜峰因版权原因,仅展示原文概要,查看原文内容请购买。
insar相位解缠的半参数解算方法

insar相位解缠的半参数解算方法
常见的半参数解算方法有基于残差平方和最小化的常规最小二乘法(Least Squares,LS)、基于算术先验假设最大后验概率估计(Maximum A Posteriori Estimation,MAP)、基于协方差函数最大似然估计(Maximum Likelihood Estimate,MLE)和基于降尺度抽样贝叶斯估计(Bayesian Estimation,BE)。
基于残差平方和最小化(Least Squares)是一种常用的半参数解算方法,它将半参数模型的残差定义为Lp(p≥1)范数,通过最小化残差的平方估计模型参数。
由于LS方法在决定性解决线性最小二乘问题方面具有较高的计算精度,因此它被广泛应用于insar相位解缠的半参数解算中。
由于地形的影响会影响INSAR的相位研究,因此利用LS方法求解地形影响也是可行的。
假设以解缠地形为主要因子,则可建立一个具有地形加权参数的insar 相位解缠模型,并通过LS方法求解这个模型,即求解地形加权参数对insar相位的影响程度。
通过比较不同的参数求解的结果,判断出不同地形的影响程度和分布规律,从而可以得到地形影响的模拟和结果。
基于改进模拟退火遗传算法的insar相位解缠算法
基于改进模拟退火遗传算法的insar相位解缠算法随着人类对地球的认知不断深入,遥感技术已经成为了现代地球观测的重要手段之一。
在遥感技术中,合成孔径雷达干涉测量(InSAR)技术因其高精度、高时空分辨率等特点而备受关注。
然而,在InSAR 技术中,由于多种因素的干扰,相位解缠问题一直是制约InSAR技术应用的瓶颈之一。
因此,如何有效地解决InSAR相位解缠问题成为了研究者们所关注的重点。
针对InSAR相位解缠问题,目前已经有很多解决方法被提出,其中改进模拟退火遗传算法是比较常用的一种方法。
改进模拟退火遗传算法是对传统遗传算法和模拟退火算法的结合和优化,具有高效、快速、稳定等优点。
本文将基于改进模拟退火遗传算法,探讨一种新的InSAR相位解缠算法。
一、InSAR相位解缠问题的基本概念在InSAR技术中,相位解缠是指从两个或多个SAR图像的相位差中,恢复出物体表面的高程信息。
由于相位差受到多种因素的影响,如大气、地表形变、噪声等,因此需要进行相位解缠操作。
相位解缠的基本思想是通过已知的相位信息,推导出未知的相位信息。
在InSAR技术中,相位解缠问题可以被看作是一个反问题,即从已知的相位差推导出物体表面的高程信息。
为了解决相位解缠问题,需要对相位差进行分析和处理,通常采用的方法有相位滤波、相位解缠算法等。
二、改进模拟退火遗传算法改进模拟退火遗传算法是一种优化算法,它是对传统遗传算法和模拟退火算法的结合和优化。
改进模拟退火遗传算法的基本思想是将遗传算法和模拟退火算法相结合,通过遗传算法的进化操作和模拟退火算法的搜索操作,获得更优的解。
具体地说,改进模拟退火遗传算法的流程如下:1、初始化种群,随机生成若干个个体;2、对每个个体进行适应度评估,根据适应度值对个体进行排序;3、选择优秀的个体进行交叉和变异,生成新的个体;4、对新生成的个体进行适应度评估,根据适应度值对个体进行排序;5、根据一定的概率,选择新个体或原有个体作为下一代种群;6、重复2~5步骤,直到达到预设的终止条件。
INSAR相位解缠方法比较分析

INSAR相位解缠方法比较分析【摘要】合成孔径雷达干涉测量技术(Interferometric Synthetic Apeurtre Radar,简称InSAR)是近二十年发展起来的一种先进的空间观测技术,它通过对同一地区的两幅单视复数图像进行配准、干涉、去除平地效应、滤波、解缠、地理编码等一系列处理,最终获取DEM。
相位解缠是InSAR数据处理的关键技术和难点,也是InSAR产品的主要误差源。
本文选取相干性较好四组SAR影像对进行实验,借助于Mcrosoft visual C++6.0平台和Matlab平台,对六种最常用的解缠方法从解缠精度和效率两个方面来分析比较各种方法。
【关键词】InSAR;缠绕相位;相位解缠;误差合成孔径雷达(Synthetic Apeurture Rada,简称SAR)是50年代末研制成功的一种微波传感器,也是微波传感器中发展最快、最有效的传感器之一。
它是一种主动传感器,与其他测地技术相比,SAR具有不受光照以及恶劣天气等条件的影响,可进行全天时、全天候地对地观测,对地物具有一定穿透能力,分辨率不受传感器平台高度的影响等优点。
因此,被广泛地应用于地质、环境、海洋、水文、灾害、测绘、农业、林业、气象和军事等领域。
早在1952年,美国Goodyear宇航公司便研制成功了第一个实用化的SAR 系统,1953年获得了第一幅机载SAR影像,到70年代中期机载SAR技术己经比较成熟,到了70年代末期星载SAR已经由实验研究转向了应用研究,进入80年代后,星载SAR得到了迅猛发展。
我国1976年开始研制合成孔径雷达,1979年获取了我国第一批合成孔径雷达图像,1987我国研制了新一代机载合成孔径雷达系统,90年代初,中国研制出机载合成孔径雷达实时成像传送处理器,目前我国星载SAR系统也正在积极研究当中。
InSAR是基于SAR成像基础和干涉测量原理上的一种雷达主动成像遥感测量技术。
它的原理是通过两副天线同时观测,或一定时间间隔的两次平行观测,获取同一景观的复图像对,由于目标与天线的几何关系,在复图像对上产生相位差,形成干涉图纹。
InSA_R相位解缠最小范数算法的研究

InSAR相位解缠最小范数算法的研究第一章绪论1.1论文研究的背景合成孔径雷达干涉测量(InSAR)是20世纪60年代末发展起来的一项技术,在近20年来受到了世界各国的广泛关注获得了迅猛发展并逐渐趋于成熟。
由于合成孔径雷达干涉测量主要是利用主动微波式传感器,它的出现大大地扩展了合成孔径雷达、光学传感器等的应用领域。
它不仅能够获取高精度的高程信息,同时还可以全天时、全天候监测陆地表面和冰雪表面地形等的微小变化,监测的时间间隔从几天到几年,监测精度可达毫米级,并且它对某些目标物体还具有一定的穿透能力。
其更令人瞩目的是,这项技术还可用于研究过去长时间无法到达的冰川和冰源的变化情况,也可用于一些灾害性地表形变的探测,如地震、火山爆发、等以及地表三维的重建,因而成为了遥感研究的热点川。
1.1.2 相位解缠研究的现状相位解缠技术最早出现在20世纪60年代末70年代初,当时主要是信号处理的需要,所研究的主要是一维问题。
除合成孔径雷达干涉测量中应用外,还在合成孔径声纳、光学干涉、微波干涉、核磁共振等方面有重要应用。
二维相位解缠始于20世纪70年代末。
在过去的30多年里,InSAR的相位解缠的方法发展十分迅速,达到了三、四十种,文献(王超,2002)列出了多种算法,但以上基本上可以分为两大类,即路径跟踪法(Path Following)和最小二乘法(Least Square),路径跟踪法基于像元到像元的局部运算来解缠,而最小二乘法是通过使解缠后解缠前相位的梯度差整体最小来进行求解的。
各种算法都有其自身的优缺点,适用于特定条件的数据,普适性都不是很好,因此算法的选择一般应根据实际情况而定。
1.2 本文研究内容我国是一个地质灾害频繁的国家,近些年来各种地质灾害接踵而来,如地震、滑坡、地面沉降等,这些地质灾害以地表形变为直接特征,严重影响了人民生命与则一产的安全,因此对地表形变的监测显得尤为重要。
合成孔径雷达技术能够利用雷达信号中的相位信息来提取地表的三维信息,精度可达毫米级,己成为目前DEM生产的主要技术手段之一,在地下资源探测以及军事目标探测等方面都具有其独特的优越性和发展潜力。
InSAR应用中相位解缠算法的快速选取

InSAR应用中相位解缠算法的快速选取
李政;崔帅;王江涛;张昆
【期刊名称】《测绘标准化》
【年(卷),期】2017(033)004
【摘要】相位解缠是InSAR数据处理中关键的技术之一.介绍6种经典解缠方法,分别是Goldstein枝切法、质量指导的路径跟踪算法、无权最小二乘法、加权最小二乘法、最小不连续法和最小费用流法.通过选择具有代表性的高山地区、平原地区和日本富士山区的数据作为相位解缠试验数据,采用6种方法进行相位解缠试验.结合算法原理,总结出可系统性指导InSAR应用的解缠算法快速选取原则,以有效提高生产效率.
【总页数】5页(P33-37)
【作者】李政;崔帅;王江涛;张昆
【作者单位】中煤航测遥感集团有限公司陕西西安710054;中煤航测遥感集团有限公司陕西西安710054;中煤航测遥感集团有限公司陕西西安710054;中煤航测遥感集团有限公司陕西西安710054
【正文语种】中文
【中图分类】P228.5
【相关文献】
1.贪婪算法在InSAR相位解缠中的应用 [J], 张莉;彭石宝
2.蚁群算法在 InSAR 相位解缠中的应用 [J], 石超;田林亚;熊欢欢;祖滢
3.遗传算法在InSAR相位解缠中的应用 [J], 赵争;张继贤;张过
4.最小独立闭合环搜索算法在探测InSAR相位解缠误差中的应用 [J], 陈涛; 秦天亦; 陈晓森; 王华
5.相位分块与拟合法结合的InSAR相位解缠算法 [J], 马靓婷; 卢小平; 余振宝因版权原因,仅展示原文概要,查看原文内容请购买。
迭代高精度insar相位解缠方法研究

摘要摘要干涉合成孔径雷达(InSAR)除有全天时、全天候等独特优点外,还可获取目标的高程信息,越来越广泛地被应用到大范围地形高程测绘中,其中,相位解缠技术起着至关重要的作用。
基于全局类解缠算法整体解缠精度高的优势,本文针对其中的四次快速傅里叶变换(4-FFT)算法进行了深入研究并提出改进,并从原理上将之扩展到多基线,提出基于多基线的高精度4-FFT算法,最后结合仿真及实测数据对比分析了该算法性能。
具体工作及创新如下:(1)阐述了合成孔径雷达干涉测量技术的基本原理。
首先介绍了InSAR测高基本原理,给出了InSAR数据处理流程,然后阐述了相位解缠基本原理,接着对传统的相位解缠算法及其优缺点做了简要介绍,提出高精度解缠算法研究的必要性,最后给出了相位解缠算法评价体系,为后面评判解缠算法性能提供依据。
(2)研究了四次FFT相位解缠算法。
首先分析了4-FFT算法的原理,通过对真实相位与缠绕相位的关系式取拉普拉斯变换,借助真实相位的拉普拉斯变换与缠绕相位间的关系,进行四次FFT求得解缠相位,获得全局类高精度4-FFT算法。
然后将4-FFT算法与同样具有全局类特点的最小二乘算法进行了原理上的分析比较,说明了4-FFT算法解缠精度更高,仿真与实测数据同样表明了该特性。
(3)提出了一种迭代式的高精度4-FFT相位解缠算法。
针对传统4-FFT相位解缠算法在低信噪比情况下解缠误差大甚至失效的问题,提出了一种基于迭代的高精度4-FFT相位解缠算法。
该算法利用传统4-FFT算法获得初始解缠相位,与缠绕相位建立相位误差主值求解公式,对误差主值进行4-FFT解缠求得误差真实值,迭代补偿到初始解缠相位,不断减小解缠误差提高解缠精度。
最后在不同信噪比下与传统4-FFT和最小二乘法进行了比较,仿真和实测数据表明,所提算法不仅在高信噪比下解缠性能优良,在低信噪比环境仍能保持高的解缠精度。
(4)提出了迭代多基线高精度4-FFT相位解缠算法。
InSAR最小范数法解缠算法

InSAR 最小范数法解缠算法理想情况下解缠相位梯度等于缠绕相位梯度的假设,相位解缠可以看成一个优化问题。
最小范数法将相位解缠问题转化为数学上的最小范数问题,目前使用最广泛的是最小二乘法,最小二乘法是一种广泛使用的优化方法,有无权和加权两种形式。
无权形势下,相位解缠是求取一个平滑的解缠相位。
就是求解一个Neumann 件下的Poisson 方程。
可以通过离散余弦变换DCT 、离散傅里叶变换FFT 或无权多级格网法来有效的解决。
由于干涉图上各像素点相关系数差别较大,存在相位的不连续,因此无权最小二乘虽然获得了平滑的相位解缠曲面,但造成局部的噪声在最小均方意义下的全局传播而产生与真实相位值偏差较大的解。
加权最小二乘法可以在一定程度上弥补无权最小二乘法的这一缺陷。
例如共轭梯度法使用的权系数是经过二值化的质量图,将干涉图中由于残余点的存在而破坏的区域赋予零权,阻止它们对相位解缠的破坏。
不带权的最小二乘法相位解缠又分为基于基本迭代法的最小二乘相位解缠、无权多极格网法、基于FFT/DCT 的最小二乘相位解缠、基于误差方程的最小二乘相位解缠。
加权最小二乘法包括picard 算法、PCG 算法、加权多级格网法。
4.2.1无权最小二乘法(1)基本迭代法基本迭代法有3种,第一种是。
ω-Jacobi 迭代法,第二种是Gauss-Seidel 迭代法,第三种是SOR 法,其迭代公式分别如下:1)ω-Jacobi1,,1,1,,1,1,(1)()/4k k k k k k i j i j i j i j i j i j i j φωφωφφφφρ++-+-=-++++-2)Gauss-Seidel111,1,1,,1,1,()/4k k k k k i j i j i j i j i j i j φφφφφρ++++-+-=+++-3)SOR111,,1,1,,1,1,(1)()/4k k k k k k i j i j i j i j i j i j i j φωφωφφφφρ++++-+-=-++++-在每个松弛迭代中,SOR 法的计算量与ω-Jacobi 迭代法与Gauss-seidel 迭代法相当。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
InSAR相位解缠最小范数算法的研究第一章绪论1.1论文研究的背景合成孔径雷达干涉测量(InSAR)是20世纪60年代末发展起来的一项技术,在近20年来受到了世界各国的广泛关注获得了迅猛发展并逐渐趋于成熟。
由于合成孔径雷达干涉测量主要是利用主动微波式传感器,它的出现大大地扩展了合成孔径雷达、光学传感器等的应用领域。
它不仅能够获取高精度的高程信息,同时还可以全天时、全天候监测陆地表面和冰雪表面地形等的微小变化,监测的时间间隔从几天到几年,监测精度可达毫米级,并且它对某些目标物体还具有一定的穿透能力。
其更令人瞩目的是,这项技术还可用于研究过去长时间无法到达的冰川和冰源的变化情况,也可用于一些灾害性地表形变的探测,如地震、火山爆发、等以及地表三维的重建,因而成为了遥感研究的热点川。
1.1.2 相位解缠研究的现状相位解缠技术最早出现在20世纪60年代末70年代初,当时主要是信号处理的需要,所研究的主要是一维问题。
除合成孔径雷达干涉测量中应用外,还在合成孔径声纳、光学干涉、微波干涉、核磁共振等方面有重要应用。
二维相位解缠始于20世纪70年代末。
在过去的30多年里,InSAR的相位解缠的方法发展十分迅速,达到了三、四十种,文献(王超,2002)列出了多种算法,但以上基本上可以分为两大类,即路径跟踪法(Path Following)和最小二乘法(Least Square),路径跟踪法基于像元到像元的局部运算来解缠,而最小二乘法是通过使解缠后解缠前相位的梯度差整体最小来进行求解的。
各种算法都有其自身的优缺点,适用于特定条件的数据,普适性都不是很好,因此算法的选择一般应根据实际情况而定。
1.2 本文研究内容我国是一个地质灾害频繁的国家,近些年来各种地质灾害接踵而来,如地震、滑坡、地面沉降等,这些地质灾害以地表形变为直接特征,严重影响了人民生命与则一产的安全,因此对地表形变的监测显得尤为重要。
合成孔径雷达技术能够利用雷达信号中的相位信息来提取地表的三维信息,精度可达毫米级,己成为目前DEM生产的主要技术手段之一,在地下资源探测以及军事目标探测等方面都具有其独特的优越性和发展潜力。
相位解缠作为InSAR技术应用处理中至关重要的一个环节,也因此显得尤为重要。
本文主要研究内容包括以下几个方面:1、对相位解缠中最小范数算法的理论进行归纳和研究.2、从对合成孔径雷达干涉测量的常用数据分析入手,在C#编程语言的基础上,结合WPS, GIS等技术和手段,对基于最小范数算法的InSAR相位解缠软件的四种基于最小范数相位解缠算法,包括DCT 、无权重多网格算法、有权重多网格算法及PCG 算法进行实现。
3、对软件实现的基于最小范数相位解缠算法进行精度分析。
4、从数据实例中得到了最小范数相位解缠算法的某些特征,方便用户选择和使用最小范数相位解缠算法。
第二章 最小范数的相位解缠算法2.1 引言一切将相位从主值或相位差值恢复为真实值的过程称为相位解缠。
从数学上讲,给定一个二维相位矩阵j ,i ψ,为了解缠该矩阵,需要对每个点(i, j)加上或减去2二的整数倍而得到一个连续的函数j i,ϕ,即有(2.1-1)其中j i K ,为整数。
进行相位解缠必须兼顾两个方面:一致性和精确性。
一致性是指解缠后的矩阵j i,ϕ中任意两点间的相位差与这两点之间的路径无关,精确性则是指解缠后的相位要能忠实地恢复原始相位函数。
目前所有相位解缠可分为两个步骤:第一是基于缠绕相位计算解缠相位的相位梯度估计值;第二是进行积分。
根据所采用的积分方法,相位解缠方法分为两大类,即路径跟踪法和最小二乘法。
现有的相位解缠算法都基于这样一个假设:有可能推导出缠绕相位的离散偏导数,即邻近像元的相位差,并且这些相位差的绝对值都小于二。
通过这些离散的偏导数,可以重建解缠相位。
在理想状态下,干涉相位呈周期变化(见图1),由0渐变到2π,再由2π迅速下降到0,然后又渐变到2π,周而复始,呈现周期性;其变化轮廓分明,层次均匀,突变点为相位周期分界点。
因此,在理想的状态下如能提取出垂直向和水平向的相位偏导数,然后沿两个方向积分,就达到相位解缠的目的。
实际上,星载或机载InSAR数据普遍存在着由于地形起伏较大而引起的密集的干涉条纹。
由于地形起伏引起的顶底位移、雷达阴影、雷达信号低信噪比和各种原因造成的去相干现象,还由于在原始雷达信号处理过程中引入的相干噪声、噪声和伪信号等造成的相位数据的不连续,解缠相位的离散相位梯度估算值将不能保持一致,也就是说,它们不能形成一个“无旋”的向量场。
此时虽然干涉相位呈一定的趋势和周期性,但并不明显。
特别是当干涉相位从2π二变化到0时界限模糊(见图2),因而为各周期的分离带来极大的困难,所以很难用简单的积分方法达到恢复真实相位的效果。
2.2 数学表达对于给定的缠绕相位函数j i ,ϕ(i=0,1,2..,., M-1; j=0,1,2,..., N-1),设其对应的解缠相位函数为j i ,φ,要使解缠相位函数j i ,φ的相位差在最小p L 范数意义下满足缠绕相位函数,则j i ,φ,需满足(2.2-1)其中x,j i∆、y j i,∆,表示像元(i,j)的缠绕相位差,设全变差用δJ来表示,则上式有:(2.2-2)其中2δ,的定义如下:,1δ(2.2-3)(2.2-4)令(2.2-5)(2.2-6)将(2.2-5),(2.2-6)代入(2.2-3)(2.2-4)中有:(2.2-7)(2.2-8)令边界满足j i,a =j i ,b =0且=J δ0且s}=o ,并将i. j 互换,得到,(2.2-9)(2.2-10)将上式代入(2.2-2)有(2.2-11)假设扰动,是随机的,则应有(2.2-12)其中0≤-i ≤-M-1:0≤ j ≤-N-1。
要求解上式,需要知道j 1-,φ,j m ,φ,1,i -φ,N ,i φ及对应的j 1-ψ,j m ,ψ,1,-i ψN i ,ψ'值,根据边界条件j i ,a =0,i=-1 M-1;0<- j <-N-1:以j i b ,=0, r=-1, N 一1;0<_i<_M 一1有(2.2-13)(2.2-14)展开式(2.2-12),并对上式加上边界条件,将此问题转换为最小范数问题,如下:(2.2-15)其中(2.2-16)(2.2-17)当p=2时,式(2.2-15)转换为了离散形式的泊松方程:(2.2-18)其中(2.2-19)其边界条件为(2.2-20)(2.2-21)即当p=2时,基于最小p L范数的相位解缠问题就转化为了求解牛曼边界的泊松方程。
2.3 无加权最小二乘相位解缠算法最小二乘相位解缠问题,无论是有无权重,都等效于要用有效的数学方法去解决离散的偏微分方程。
最小二乘法为线性方程,其算法结果又是有效的,可跟踪的,因此使用非常广泛最小二乘相位解缠方法的基本思想:使缠绕相位的离散偏微分导数和解缠相位的离散偏微分导数差的平方和最小,即,(2.3-1)将式(2.2-18)写成KxK 线性系统下的矩阵形式,有(2.3-2)其中,P 是式2.2-18)等式左边的离散拉普拉斯算子的稀疏矩阵。
为一维矩阵向量,K=MN 是像元数。
一维矢量中的和二维之间的关系为: k = i + jM, i=0,1,M-1, j 二。
,1,...N-1,同样的Pk 和其对应的j i P ,,也有此关系。
2.4 加权最小二乘相位解缠算法无加权的最小二乘算法的缺点是穿过奇点区域而不是绕过它们进行解缠,这可以通过引入相位数据的权重而得到克服。
对于那些因噪声或其他退化作用而被打断的相位,可将其权重赋予0,使其不影响解缠过程。
如果为给定数据赋予权重(0≤j W ,i ≤1),那么最小二乘问题就转化为加权最小二乘问题,故式(2.4-1)可改写为(2.4-2)其中U (i,j )和州V(i.j)为梯度权重:(2.4-3)于是,加权最小二乘解j i , ,,由如下方程求解:(2.4-4)其中j i C ,为相位拉普拉斯算子:(2.4-5)求解式(2.4-4)的高斯赛德尔松弛算法也可以采用加权的迭代形式:(2.4-6)与无权重的形式相同,高斯赛德尔松弛算法的收敛速度较慢,因此可采用加权多重网格技术,加快算法的执行速度。
2.5 无权重的多网格算法多网格法是一类经典的在较大网络基础上解决偏微分方程的快速方法。
这类方法是基于在更粗、更小的网格上应用高斯一赛德尔松弛算法的思想。
特别地,对于解决M×N网格上离散PDE问题,多网格法与直接傅里叶变换速度一样快。
但是,与直接算法不同的是,多网格法可以解决更多的问题,包括非线性的PDE问题。
并且从实用角度上来看,多网格还具有一个FFT法和DCT法不具备的优点,即它对网格的大小没有限制,不要求数组的大小为2的幂次。
高斯一赛德尔松弛法是一个平滑算子,能很快的去除误差的高频部分,但去除低频部分则非常的慢。
因此,多网格法的关键在于将误差的低频成分转换为高频成分,再将这些高频成分用高斯一赛德尔松弛法去除。
在实际处理中,则是通过把这个问题转移到更粗的网格中去实现。
更粗网格的较低样本率增加了剩余误差的空间频率。
如果有一个金字塔形的网格(见图1 ),下层网格的分辨率只有它上面一层的一半,分辨率降低了,而空间频率在密网格和粗网格中不断传递,将在粗网格中产生不断增加的较高的空间频率,换句话说,在密网格的全局信息、将变成粗糙网格中的局部信息。
把计算结果转移到粗网格的操作数称为约束操作数或密到粗操作数,而把计算结果转移到更密网格的操作数称为延伸操作数或粗到密操作数。
图1 多网格模式下的分辨率变化金字塔约束操作数的一般选择为注入操作数,它每隔一个像元进行采样,定义为j i C ,=j i f 2,2,其中j i f ,是MxN 的密网格,j i C ,是M/2xN/2的粗网格。
但是,在实际应用中常采用一种效果更好的约束操作数,称为“全重”,其定义为:(2.5-1)实际上,全重操作数是用下面的滤波模板先平滑密网格(2.5-2)然后每隔一个点进行采样。
延伸操作数为一个双线性插值,其定义为:(2.5-3)约束操作数把方程的“残差误差”转换到更粗的网格对其作松弛处理,等同于对方程木身作松弛处理。
如果把相位解缠问题表示成线性问题,,其中P是矩阵, 和P是向量,那么“残差方程’,可以表示如下:(2.5-4)其中是的近似,ε是未知误差。
用初始的估计值对方程进行松弛运算,等同于用初始估计值ε=0对剩余方程进行松弛运算,其中:是未知的剩余误差。
实际上,近似值必是在一个网格上通过高斯一赛德尔松弛法得到的中间值,初始的估计值ε=0是在下一个更粗网格的高斯一赛德尔松弛法的起点。