苹果自动采摘机的设计
《苹果采摘机的设计》
苹果采摘机的设计摘要:根据苹果收获的现状, 针对国内苹果的生产环境, 设计了一种基于人工辅助的简单苹果收割机。
分析了苹果收割机及其部件的结构和功能。
提出并实现了多级可调杆的设计。
提出并进行了基于重力原理的嵌套铁环输送和收集袋的设计。
苹果辅助收割机集采摘、收集、运输于一体, 适用于苹果、梨、等苹果采摘。
试验表明, 水果辅助收割机结构简单, 操作灵活, 效率高, 收获质量好, 能显著降低劳动强度, 降低成本, 具有较高的经济和实用生长趋势。
工业化, 人们对水果收获效率提出了越来越高的要求, 传统的人工收获方法效率低, 劳动力浪费等。
不足。
本文提出了一种新型的苹果皮卡机。
通过以往的结构设计、安装调试和后来的现场试验, 验证了该装置的可行性。
关键词:采摘;装置;设计目录第一章绪论 (3)1.1引言 (3)1.2 课题研究目的与意义 (4)1.3 国内外林果机械研究现状及分析 (5)1.3.1 国外林果机械研究现状 (5)1.3.2 国内林果机械研究现状 (6)1.3.3 我国林果采摘机械与国外的差距 (7)第二章机械设计 (8)2.1 苹果果实分布及采摘机理 (8)2.1. 1 果实分布 (8)2.1. 2 采摘机理及要求 (8)2.2 当前采摘情况 (8)2.3 设计总体构思 (9)2.4设计方案 (11)2.4.1操作杆 (14)2.4.2 夹持式采摘机构设计 (15)2.4.3 分拣结构 (16)2.5收集袋 (17)2.6试验分析 (18)第三章结论 (20)致谢...................................................................................... 错误!未定义书签。
参考文献.. (21)第一章绪论1.1引言中国是世界上最大的水果生产国和世界上最大的水果消费国。
占全球产量约1 4% 的水果种植行业的快速发展, 增加了市场对果园机械的需求。
苹果采摘机械手的设计与实现

·117·科技纵横农业开发与装备 2020年第11期苹果采摘机械手的设计与实现杨栋皓,蒋爱德*(河南牧业经济学院,河南郑州 450000)摘要:苹果种植是农业经济中不可或缺的一部分,主要针对苹果采摘过程中人工采摘劳动强度大、果树高处采摘不方便的现状,研究苹果采摘作业环境以及苹果自身物理特性,模仿人工采摘动作,采用仿生学原理,设计了一种单连杆支撑的苹果采摘机械手,方便人们采摘的同时,为智能化苹果采摘设备的研究发展奠定了基础。
关键词:苹果采摘;机械手;仿生学0 引言作为世界上最大的苹果生产国和消费国,2019年,我国苹果种植面积在233.33万hm 2上下,总产量超过4 000万t,我国苹果产业的发展潜力是巨大的,但在苹果生产过程中,机械化程度并不高,大部分还需要人工采摘,苹果采摘的劳动成本占总成本50%以上[1]。
面对我国人口日益老龄化,从事农业劳动人口日益减少的问题,传统苹果的采摘方式日益满足不了苹果种植业的需求,在农业科学技术与机械设备大力发展的背景下,苹果采摘过程机械化与自动化已成为必然趋势。
苹果采摘设备的研究在上世纪80年代就已经开始,并由法国的一家研究所成功制造,紧接着日本、美国、韩国能发达国家也研制出不同类型的苹果采摘设备,如日本的二指夹持采摘机械手,采摘速度高,但采摘质量一般;美国的七自由度采摘机器人,尽管很灵活,但控制难度较高;韩国庆北大学研制的四自由度机械手臂带动的三指夹持机构,工作范围大,但结构复杂,避障能力不足。
我国的苹果采摘设备研究起步晚但发展快,也出现了多自由度、柔性手指、气囊夹持等的创新结构[2]。
当前我国的苹果采摘设备研究已取得一定成果,但仍存在着制造成本高、通用性差、采摘成功率低等问题,使其难以推广。
本文设计的苹果采摘机械手作为一种苹果采摘辅助设备,结构简单可靠、成本低、操作灵活,且能够大大减少苹果采摘时间,苹果采摘机械手在现阶段对我国农业机械化发展有着推动作用,对实现乡村振兴也有着重要的现实意义。
苹果采摘机器人整体设计概论

苹果采摘机器人整体设计概论作者:吴旭阳来源:《科学与信息化》2020年第27期摘要在苹果果实的整个生产过程中,采摘过程中是最耗时、耗力的一个环节,如果可以在苹果的生产环节采用性能可靠、功能多元的自动机械装置,对于现代化农业发展有重大意义,故对苹果采摘机器人的机械臂、轮式底盘、视觉系统、激光测距系统、灰度检测系统进行了设计,实现对苹果采摘机器人原型机的搭建关键词机械臂;视觉系统;采摘机器人近几年,苹果采摘机器人是受果农喜爱的一种智能、专业的采摘设备,可高效完成采摘作业,因为采摘环境过于复杂,就需要一款适应能力强、运行性能可靠的采摘装置,在此情况下,对苹果采摘装置开展深入研究既表现出重大的实践意义,还能推动机器人技术、图像处理技术的发展。
1 苹果采摘机器人总体设计方案本文设计的苹果采摘机器人主要由五由度机械臂、轮式底盘、灰度检测系统、视觉系统与深度距离检测系统组成。
轮式底盘、机械臂构成了水果采摘机器人的运动单元,视觉系统就是采摘机器人的眼睛对采集到的信息进行处理得到目标的平面坐标。
深度检测系统能够检测目标位置与视觉相机的距离。
2 控制器2.1 上位机计算机作为采摘机器人的上位机,是图像处理与跟踪控制的核心系统,计算机控制CCD 摄像头采集苹果图像,计算机运行在Windows平台,使用Linkboy作人机交互界面,计算机对摄像头进行设置修改相应的参数确保摄像头清晰成像,计算机自动保存单目相机采集的图像。
2.2 下位机下位机的主板是核心处理器是ATmega2560,Arduino 2560具备双重供电系统,有USB口供电和外部电池供电,这两种供电系统会根据特定的情况进行自动切换,Arduino 2560开发板外部供电的额定电压为7~12V,在7V以下时I/O口无法正常工作,在高于12V时很容易烧坏设备,因此,本设计选用的是9V电池供电。
在本文设计中下位机Arduino 2560能够实现对轮式底盘和机械臂的控制。
毕业设计采摘机械手
设计一个采摘机械手作为毕业设计是一个有趣和有挑战的项目。
以下是一个简要的设计方案:
1. 目标与需求分析:
-目标:设计一个能够自动采摘果实的机械手,提高采摘效率和减轻劳动强度。
-需求:机械手应具备准确的定位能力、稳定的抓取力度,并适应不同类型的果实。
2. 机械结构设计:
-手臂结构:选择合适的关节设计,使机械手具备较大的工作范围和灵活性。
-抓取器设计:根据果实的形状和大小,设计合适的抓取器,如夹爪、吸盘或夹子等,以确保稳定和安全地抓取果实。
3. 控制系统设计:
-定位系统:使用视觉传感器或激光测距仪等装置,实时识别果实的位置和姿态,并将数据传输给控制系统。
-运动控制:根据定位系统提供的数据,通过电动驱动或气动驱动等方式,控制机械手的运动,实现精确定位和抓取。
4. 自动化控制设计:
-控制算法:设计合适的算法,用于判断果实的成熟度、确定最佳采摘时机,并控制机械手的动作。
-用户界面:设计一个友好的用户界面,方便操作员监控和调整机械手的工作参数。
5. 安全性与可靠性设计:
-安全保护:考虑在机械手上安装传感器,如碰撞传感器或力传感器,以避免对果实和操作人员造成损害。
-可靠性测试:进行系统测试和验证,确保机械手在连续工作中的稳定性和可靠性。
6. 性能评估与改进:
-进行实地测试和评估机械手的采摘效率、准确性和稳定性。
-根据实际使用情况,收集反馈意见并进行改进,优化机械手的设计和性能。
以上是一个初步的设计方案,具体实施过程中需要根据自身的条件和资源对细节进行调整和完善。
另外,为确保设计的可行性和安全性,建议与导师和相关专业人士进行深入讨论和指导。
机械手在苹果采摘中的应用设计

机械手在苹果采摘中的应用设计摘要在设计初期,需要进行深入的市场调研,考察市场现状、产品水平以及应用前景。
此外,还需要实地调查市场中现有的苹果采摘机械手,评估其性能和结构,为后续的设计和研发工作打下坚实的基础。
这款采摘机械手由电动机控制,具备剪断树枝和抓拽树枝的功能,并能根据实际情况自动调整与目标的距离。
接下来,我们对主要零部件进行强度校验,以确保设计的可行性和可靠性。
最后,面向大规模生产,我们利用CAD绘图软件制作了该产品的零件图纸和装配图纸,以完成整个设计过程。
关键词:苹果,手持式,机械手,电机驱动,强度校核第一章引言1.1课题研究背景及来源随着经济的发展和社会的发展,人民的物质生活质量和对健康的要求也随之提升,以水果为主要的健康食物已经成为当前我国食物的主要组成部分。
近年来,果树的发展逐渐成了很多农户的第二个主要的选择,因此,我国的果树面积和各种品种的果实数量都出现了明显的增加,因此,果树生产也逐渐繁荣起来。
特别是1978年以来,随着中国农村经济的快速发展,中国的果品生产从一九九七年跃居全球首位。
而苹果的发展也让人欢欣鼓舞,在2012,苹果种植的土地面积达23万亩,年产苹果380万吨,占据了世界上一半的苹果,几乎占据了世界上苹果的一半,也就意味着中国将会是世界上最大的苹果生产、出口和消费市场。
目前,中国的苹果生产区域分布在渤海地区,黄土高原地区,黄河古道地区,西南冷凉高原地区。
1.2国内外研究进展日本冈山大学于一九九三年开发出番茄采集机械手,追随美国的步伐。
在1-1中可以看到。
与美国的第一款相比,这款采集机械手使用了一个七个自由度的更加精密的机械手臂。
这种采集机械手使用了 CCD相机,能够精确地感知到果实的成熟期,并且能够根据眼睛的角度来精确地确定果子的位置,并根据果子的大小来确定果子的大小,最后用手指将果子的尖端给固定住,再用手腕将其扭下来。
该采集机械手从认出到采集只需要15秒钟,成功率为75%。
一种新型苹果采摘器的设计
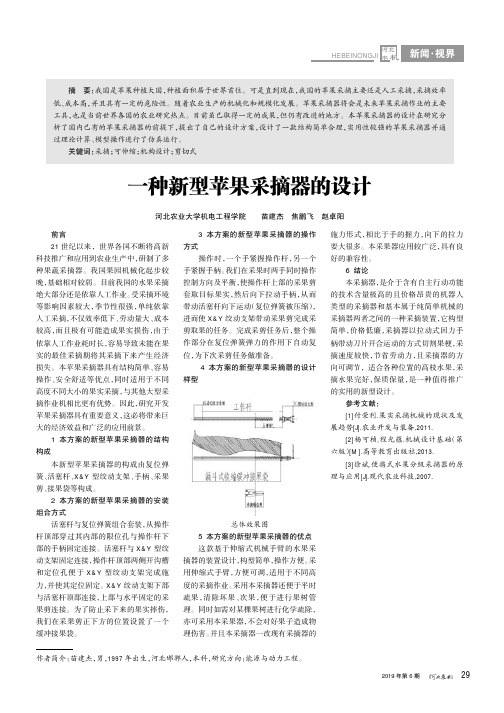
总体效果图 5 本方案的新型苹果采摘器的优点 这款基于伸缩式机械手臂的水果采 摘器的装置设计,构型简单,操作方便。采 用伸缩式手臂,方便可调,适用于不同高 度的采摘作业。采用本采摘器还便于平时 疏 果 ,清 除 坏 果 、次 果 ,便 于 进 行 果 树 管 理。同时如需对某棵果树进行化学疏除, 亦可采用本采果器,不会对好果子造成物 理伤害。并且本采摘器一改现有采摘器的
施力形式,相比于手的握力,向下的拉力 要大很多。本采果器应用较广泛,具有良 好的兼容性。
6 结论 本采摘器,是介于含有自主行动功能 的技术含量极高的且价格昂贵的机器人 类型的采摘器和基本属于纯简单机械的 采摘器两者之间的一种采摘装置,它构型 简单,价格低廉,采摘器以拉动式回力手 柄带动刀片开合运动的方式切割果梗,采 摘速度较快,节省劳动力,且采摘器的方 向可调节,适合各种位置的高枝水果,采 摘水果完好,保质保量,是一种值得推广 的实用的新型设计。 参考文献: [1]付荣利.果实采摘机械的现状及发 展趋势[J].农业开发与装备,2011. [2]杨可桢,程光蕴.机械设计基础(第 六版)[M].高等教育出版社,2013. [3]徐斌.便携式水果分级采摘器的原 理与应用[J].现代农业科技,2007.
作者简介:苗建杰,男,1997 年出生,河北邯郸人,本科,研究方向:能源与动力工程。
2019 年第 6 期
29
关键词:采摘;可伸缩;机构设计;剪切式
一种新型苹果采摘器的设计
河北农业大学机电工程学院 苗建杰 焦鹏飞 赵卓阳
前言 21 世纪以来,世界各国不断将高新 科技推广和应用到农业生产中,研制了多 种果蔬采摘器。我国果园机械化起步较 晚,基础相对较弱。目前我国的水果采摘 绝大部分还是依靠人工作业。受采摘环境 等影响因素较大,季节性很强,单纯依靠 人工采摘,不仅效率低下、劳动量大、成本 较高,而且极有可能造成果实损伤,由于 依靠人工作业耗时长,容易导致未能在果 实的最佳采摘期将其采摘下来产生经济 损失。本苹果采摘器具有结构简单、容易 操作、安全舒适等优点,同时适用于不同 高度不同大小的果实采摘,与其他大型采 摘作业机相比更有优势。因此,研究开发 苹果采摘器具有重要意义,这必将带来巨 大的经济效益和广泛的应用前景。 1 本方案的新型苹果采摘器的结构 构成 本新型苹果采摘器的构成由复位弹 簧、活塞杆、X&Y 型绞动支架、手柄、采果 剪、接果袋等构成。 2 本方案的新型苹果采摘器的安装 组合方式 活塞杆与复位弹簧组合套装,从操作 杆顶部穿过其内部的限位孔与操作杆下 部的手柄固定连接。活塞杆与 X&Y 型绞 动支架固定连接,操作杆顶部两侧开沟槽 和定位孔便于 X&Y 型绞动支架完成施 力,并使其定位固定。X&Y 绞动支架下部 与活塞杆顶部连接,上部与水平固定的采 果剪连接。为了防止采下来的果实摔伤, 我们在采果剪正下方的位置设置了一个 缓冲接果袋。
水果采摘装置设计

水果采摘装置设计水果采摘装置设计0文件综述0.1 水果采摘实现机械化的必定趋向在水果的生产作业中,收获采摘是整个生产中最耗时最费劲的一个环节。
水果收获期间需投入的劳力约占整个栽种过程的 50%~70%。
采摘作业质量的利害直接影响到水果的储藏、加工和销售,进而最后影响市场价钱和经济效益。
水果收获拥有很强的时效性,属于典型的劳动密集型的工作。
可是因为采摘作业环境和操作的复杂性,水果采摘的自动化程度仍旧很低,当前国内水果的采摘作业基本上仍是手工达成。
在好多国家跟着人口的老龄化和农业劳动力的减少,劳动力不单成本高,并且还愈来愈不简单获取,而人工收获水果所需的成本在水果的整个生产成本中所占的比率竟高达33%~50%。
高枝水果的采摘还带有必定的危险性。
所以实现水果收获的的机械化变得愈来愈急迫,发展机械化的收获技术,研究开发水果采摘机器人拥有重要的意义。
研究和开发果蔬收获的智能机器人技术对于解放劳动力、提升劳动生产效率、降低生产成本、保证新鲜果蔬质量,以及知足作物生长的及时性要求等方面都有侧重要的意义。
采摘机器人是未来智能农业机械化的发展方向,拥有广阔的应用远景。
2004 年 11 月 1 日公布实行的《中华人民共和国农业机械化促使法》还明确规定国家采纳举措鼓舞,扶助农业机械化的发展,机械采摘取代手工作业是必定的发展趋向。
0.2 外国水果机械化采摘装置研究进展及现状水果的机械化收获技术已有40 余年的研究历史。
收获作业的自动化和机器人的研究始于20 世纪 60 年月的美国,1968 年美国学者 Schertz 和 Brown 首次提出应用机器人技术进行果蔬的收获,当时开发的收获机器人样机几乎都需要有人的参加,所以只好算是半自动化的收获机械。
采纳的收获方式主假如机械震摇式随和动震摇式,其弊端是果实易损,效率不高,特别是没法进行选择性的收获。
从20 世纪 80 年月中期开始,跟着电子技术和计算机技术的发展,特别是工业机器人技术、计算机图像办理技术和人工智能技术的日趋成熟,以日本为代表的西方发达国家,包含美国、英国、法国、荷兰、以色列、西班牙等国家,都在水果采摘机器人方面做了大批的研究工作,波及到的研究对象主要包含甜橙、苹果、樱桃、甜瓜、葡萄、草莓等,试验成功了多种拥有人工智能的收获采摘机器人。
苹果采摘及分拣一体化机械设计

苹果采摘及分拣一体化机械设计曹亚楠1,2,刘达志1,金华明1,徐平平1,朱文艳1,段宝玉3(1.内蒙古科技大学机械工程学院,内蒙古 包头 014010;2.华北电力大学动力机械及工程学院,北京 102206;3.内蒙古科技大学分析测试中心;内蒙古 包头 014010)摘 要:为了减轻果农在采摘与分拣果实过程中的工作量,解决采摘过程机械化程度低的问题,针对中小型果园,在气压传动与机械结构的基础上,研制了一种针对高空水果(苹果为主)采摘及分拣一体化装置。
此装置由夹取机构、伸缩机构、动力输出装置和分拣装置四部分组成。
利用单作用气缸控制夹取机构实现摘水果,利用双作用气缸实现装置的伸缩,通过动力输出装置为气缸提供气源,利用分拣装置实现水果的分拣。
关键词:采摘;分拣;气缸;夹取;伸缩中图分类号:S225 文献标识码:A 文章编号:1673-2154(2019)05-0030-050 引言随着我国经济发展和人民生活水平的提高,水果市场需求持续扩大,因而对水果种植、采摘、供应等一系列环节提出更高要求。
其中,水果采摘大约占到整个产业工作量的50%,水果收获(采摘)成本大概占到水果总成本的35%~45%[1]。
目前我国大部分水果产区在水果采摘时依然以手工作业为主,机械化程度不高。
以苹果为例,在丘陵产区,适用机械少,而平原产区受果园规模、果农购买力等原因影响,机械化水平也较低,导致我国苹果优势产区的综合机械化水平不到20%,非优势产区的综合机械化水平不到10%[2]。
水果采摘的机械化程度低,制约了苹果产业的发展。
苹果采摘是一项季节性较强的工作,目前的采摘仍以人力为主,我国面临人口结构老龄化和农村劳动力不断减少的现状,这进一步制约了苹果产业的发展。
为解决当前的矛盾,急需研究开发适合生产实际的水果采摘机械,以此减轻劳动强度、提高生产效率 [3,4]。
本文旨在设计一种低成本的通用型苹果采摘机械,以适应市场需求,促进苹果产业的发展。