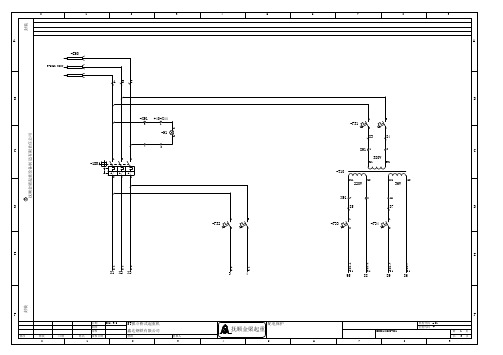
抓斗控制电路图
5T抓斗原理图
-S13
12
D
29
E -K0 4
A1 A2 1.5 1 3 5 13 23 2 4 6 14 24 /2.1 /2.1 /2.2 /3.2 /3.5
E
F
封装
F
日期 2014/9/6 制图 审核 审核日期 1
5T抓斗桥式起重机 鑫达钢铁有限公司
替换 2 替换人 3 4
配电保护
抚顺金梁起重
5 6 7
机构代码 = 01 位置代码 + MN20140820-001 8 9 第 共 3 3 页 页
C35 X31 =12/1.3 X21 =12/1.3 X11 =12/1.3
C34
C15
E
E
F
封装
F
日期 2014/9/6 制图 审核 审核日期 1
5T抓斗桥式起重机 鑫达钢铁有限公司
替换 2 替换人 3 4
配电保护
抚顺金梁起重
5 6 7
机构代码 = 01 位置代码 + MN20140820-001 8 9 第 共 2 3 页 页
517
5 5 21
521
6 6 21
525
7 7 21
17
17
K03
/3.5 18
K04
/3.6 18
K11
/2.2 22
K22
/2.4 22
K12
/2.4 22
C
C 529 531
-07LJ1
/1.1 12
511
A1 11
519
523
A1
527
-K1
-07LJ2
/1.1 12 11
W
PE
C
抓斗起重机全变频PLC-DP控制电路图

TB-2512 TC-608 TC-1003 YBLX19-111/TC40-220V Φ200;~220V CDBR-4030B SJ700-300HFEF2 SJ700-055HFEF2 SKSG-100A/5V SKSG-20A/5V LC1-D12 M7C LC1-D12 M7C RXM2LB2P7+RXZE1M2C RXM2LB2P7+RXZE1M2C C32N/3P+OF C10 C32N/3P+OF C10 NSC100S3080 NSC60E3016
16 -X92
15 -X92
14 -X92
13 9S02/9E02
12 9MF2
11 2UB1.2UB2
10 1UB1.1UB2
9 1U.2U
8 1ZL.2ZL
7 2K7.2K8
6 1K7.1K8
5 2KA1~2KA6
4 1KA1~1KA6
3 2Q2.2Q3
名
绍兴起重机总厂
称
SHAOXING MASTER CRANES FACTORY
质量
+A3 大,小车组合控制柜 [现场调试完毕出线胶圈孔用填料密封]
电气设备(元件)明细表
比例
图
号
QZ 11.1031.4.2
张数
3
张次
2
20
19
18 9X05
17 9X3~4
16 9X31
15 9Q3
14 9Q2
13 9Q4
9 PLC
8 PLC
7 PLC
6 PLC
5 PLC
4 1K01~4K04
3 UR1~UR4
2 ZL1.ZL2
1 Q01~Q04
港口门座起重机MQ4035电气图表

20 PLC 扩展单元 CP1W-40EDR 3 欧姆龙19 PLC CPU 单元 CP1H-XA40DR-A 1 欧姆龙18 ZL1.ZL2 单相滤波器 SH440-10 217 UR1.UR2 电涌保护器 NU6-III 275V 复合型 416 UV 开关电源 S8JC-15024 1 欧姆龙15 0T2 控制变压器 NDK1000-220/220 114 0T1 控制变压器 NDK2000-380/220 1 33 X91接线端子排 JF5-2.5 180 13 0KM.0KM’ 总接触器 LC1-D300 M7C+LADN40C 2 32 X91接线端子排 TB-2512 1 12 5KA11~5KA14 小型继电器 RXM2LB2P7+RXZE1M2C 4 +RXZ410 31 X91接线端子排 TC-1506 1 11 5K01~5K07 小型继电器 RXM2LB2P7+RXZE1M2C 7 +RXZ410 30 X91接线端子排 TC-3006 1 10 1K01~4K02 小型继电器 RXM2LB2P7+RXZE1M2C 15 +RXZ410 29 9S01/9E01柜门开关/柜灯 YBLX19-111/TC40-220V 1/1 9 0KA0 小型继电器 RXM2LB2P7+RXZE1M2C 1 +RXZ410 28 0S3停止按钮 ZB2-BC4C 1 装柜门 8 0K00~0K02 小型继电器 RXM2LB2P7+RXZE1M2C 3 27 H1.H2电源指示灯 XB2EV453/454 1/1 装柜门 7 0CT 电流互感器 LMZJ1-0.5 800/5 1 26 AF1柜扇 Φ200;~380V 1 6 0KV 相序继电器 RM4-TG20 1 25 AF1K柜扇接触器 LC1-D09 M7C 1 5 FU2.FU3 熔断器 RT28N-32X/2P 10A 2 24 YKM油泵接触器 LC1-D25 M7C 1 4 FU1 熔断器 RT28N-32X/3P 10 1 23 YQ油泵断路器 C32N/3P+OF C20 1 3 Q01~Q04 小型断路器 C32N/2P C10 4 22触摸屏 TH465-MT 1 装联动台 2 0Q2.0Q3 小型断路器 C32N/2P C16 2 21总线连接器 CP1W-CIF11 1 欧姆龙 1 0Q1 总断路器 GSM1-800L/3340 800A 380V 1 213电器 序 代 号 名 称 型号 规格 数量备 注 序代 号 名 称 型号 规格 数量备 注+A1 总电源,PLC 组合电控柜 设计周峰 标准 陈中革 审查叶贤送 审定 何荣欣 工艺 梅伟峰 日期 2011.11. 名 称电气设备(元件)明细表 图 号 MQ 11.4035.4.2 浙江三港起重电器有限公司项 目 MQ 4035门座起重机 无锡市锡山港口起重机械有限公司 质量 比例 张数 6 张次 110 -X93接线端子排 TB-2512 3 10 -X92 接线端子排 TB-2512 3 9 -X93接线端子排 TC-3006 1 9 -X92 接线端子排 TC-3006 1 8 9S03/9E03柜门开关/柜灯 YBLX19-111/TC40-220V 1/1 8 9S02/9E02 柜门开关/柜灯 YBLX19-111/TC40-220V 1/1 7 AF3柜顶换气扇 Φ200;~380V 1 7 AF2 柜顶换气扇 Φ200;~380V 1 6 2UB1~2UB3制动单元 CDBR-4045B 3 6 1UB1~1UB3 制动单元 CDBR-4045B 3 5 2U变频器 HB4A0304 (SHD132KW) 1 +PG-B3=1 5 1U 变频器 HB4A0304 (SHD132KW) 1 +PG-B3=1 4 2K7.2K8接触器 LC1-D12 M7C 2 4 1K7.1K8 接触器 LC1-D12 M7C 2 3 2KA1~2KA7小型继电器 RXM2LB2P7+RXZE1M2C 7 +RXZ410 3 1KA1~1KA7 小型继电器 RXM2LB2P7+RXZE1M2C 7 +RXZ410 2 2Q2小型断路器 C32N/3P+OF C10 1 2 1Q2 小型断路器 C32N/3P+OF C10 1 1 2Q1断路器 NSC400K/3315 1 1 1Q1 断路器 NSC400K/3315 1 序 代 号 名 称 型号 规格 数量备 注 序 代 号 名 称 型号 规格 数量备 注+A3 副机(开闭)电控柜+A2 主机(支持)控制柜 设计周峰 标准 陈中革 审查叶贤送 审定 何荣欣 工艺 梅伟峰 日期 2011.11. 名 称电气设备(元件)明细表 图 号 MQ 11.4035.4.2 浙江三港起重电器有限公司项 目 MQ 4035门座起重机 无锡市锡山港口起重机械有限公司. 质量 比例 张数 6 张次 220 -X94 接线端子排TB-2512 319 -X94 接线端子排TC-1006 318 -X94 接线端子排TC-3003 117 9S04/9E04 柜门开关/柜灯YBLX19-111/TC40-220V 1/116 AF4 柜顶换气扇Φ200;~380V 115 4K13.4K14 回转切电阻接触器LC1-D115 M5C+LADN11C 214 4K13.4K14 回转切电阻接触器LC1-D115 M5C+LADN11C 213 4K21.4K22 回转切电阻接触器LC1-D95 M7C 212 4K11.4K12 回转切电阻接触器LC1-D95 M7C 211 4K1.4K2 回转接触器LC1-D300 M7C+LADN22C 2 +LA9-FJ970=110 4CT1.4CT2 电流互感器BH0.66 I 30 100/5 49 -X95 接线端子排TB-2512 3 9 4F1~4F2 回转过流继电器LT47-60MTA 28 -X95 接线端子排TC-603 1 8 3UB1.3UB2 制动单元CDBR-4030B 27 -X95 接线端子排TC-2006 1 7 3U 变幅变频器F7B-4075 (75KW) 16 9S05/9E05 柜门开关/柜灯YBLX19-111/TC40-220V 1/1 6 3K7.3K8 接触器LC1-D25 M7C 25 AF5 柜顶换气扇Φ200;~380V 1 5 4KA1~4KA6 小型继电器RXM2LB2P7+RXZE1M2C 6+RXZ4104 5UB1~5UB2 制动单元CDBR-4045B 2 4 3KA1~3KA7 小型继电器RXM2LB2P7+RXZE1M2C 7+RXZ4103 5U 变频器G7B-4090 (90KW) 1 3 3Q2 小型断路器C32N/3P+OF C10 12 5KA1~5KA7 小型继电器RXM2LB2P7+RXZE1M2C 7+RXZ410 2 4Q1 回转机构断路器NSC250S3250 11 5Q1 断路器NSC400K/3315 1 1 3Q1 变幅机构断路器NSC160S3160 1序代号名称型号规格数量备注序代号名称型号规格数量备注+A5 行走电控柜+A4 变幅、回转组合电控柜设计周峰标准陈中革审查叶贤送审定何荣欣工艺梅伟峰日期2011.11. 名称电气设备(元件)明细表图号MQ 11.4035.4.2浙江三港起重电器有限公司 项目MQ 4035门座起重机无锡市锡山港口起重机械有限公司质量比例张数 6 张次 310 -X96 接线端子排TB-2512 3 9 线排TB-2512 2 9 -X96 接线端子排TB-4512 3 8 9X81 单相~36V插座 AC30/2孔模块化插座 10A 1 8 9S06/9E06 柜门开关/柜灯YBLX19-111/TC40-220V 1/17 9X71 单相插座 AC30模块化插座 10A 1 7 FPK 防爬器接触器LC1-D25 M7C 16 9X61 三相插座 AC30模块化插座 25A 1 6 DLK 电缆卷筒接触器LC1-D25 M7C 15 9Q14. 三相检修电源开关C32N/3P C60 1 5 5K7.5K8 风机,制动器接触器LC1-D25 M7C 24 9Q13 隔离电源分开关C32N/1P C20 1 4 5F1~5F8 热继电器3UA59 40-2D (25~32A) 83 9Q12 隔离电源分开关C32N/1P C32 1 3 5Q5 小型断路器C32N/4P C20 12 9Q11 隔离电源总开关C32N/2P C60 1 2 5Q4 小型断路器C32N/4P C20 11 0Q0 下部总断路器GSM1-800L/3300 800A 1 213电器 1 5Q2.5Q3 小型断路器C32N/4P C10 2序代号名称型号规格数量备注序代号名称型号规格数量备注下部总电源、检修柜+A6 行走(下部)电控柜—安装在下部设计周峰标准陈中革审查叶贤送审定何荣欣工艺梅伟峰日期2011.11. 名称电气设备(元件)明细表图号MQ 11.4035.4.2浙江三港起重电器有限公司 项目MQ 4035门座起重机无锡市锡山港口起重机械有限公司质量比例张数 6 张次 420 9X01 单相~36V 插座 AC30/2孔模块化插座 10A 1 装司机室内19 9X1.9X2 单相插座 AC30模块化插座16A/10A 1/1 装司机室内18 9X31 三相插座 AC30模块化插座 25A 1 装司机室内17 9S7.9S8 备用分开关 C32N/1P C20 2 装司机室内16 9SJ 空警灯开关 C32N/1P C10 1 装司机室内 15 5SA1+5SBR+5SBL;5SA2.。
门座式起重机电气控制原理图201415
门座式起重机电气控制原理图201415LT门座式起重机电气控制原理图集版本V2.0季本山叶子清编1南通航运职业技术学院常州基腾电气有限公司2013-12前言随着计算机技术的的发展尤其可编控制器(PLC)、变频技术在港口起重运输机械中的运用,为港口起重运输机械设备的发展注入了新的活力。
在智能化、自动化的电气控制系统极大提高了港口起重运输机械的装卸能力的同时,向港机电气控制系统的维护与修理人员提出了新要求,PLC与变频控制技术不同于传统的接触器-继电器控制系统,维修人员不仅要能熟练掌握接触器-继电器控制原理,同时要掌握PLC与变频技术及相关的计算机技术的技能。
港口物流设备与自动控制作为我院国家骨干院校重点建设专业,我院相关专业教师根据现代港机电气控制系统现状,结合职业教育特征,与常州基腾电气有限公司联合研制了集装箱桥吊电气控制模拟系统和门座式起重机电气控制系统模拟器。
这两种电气控制模拟系统以电气真实容量小、机械模拟为原则。
门机电气控制模拟系统将起升、行走、变幅和旋转四大机构的电气控制系统的电力驱动(变频器)和动力(电动机)的容量缩小,其他均与真实门机电控系统一致。
在集装箱桥吊电气控制模拟系统中仅对起升机构、小车及吊具倾转的电气控制作处理,因其他机构电气控制与门机相似就不作模拟。
211第一章读图说明作为一位港机电气控制工程师,从事港口机械电气控制系统的维护与设计工作,那么你除了掌握可编程控制器、变频器、低压电器的基本知识外,还必须掌握成套控制系统设计的一些基本知识,才能设计出用户满意的港口机械电气控制柜;在港口企业或港机制造企业从事港口机械电气控制调速系统的安装、调试或维修工作,你必须能够看懂电气图纸,了解设计者的设计思路,才能正确的布线、接线、调试或维修。
看懂电气原理图,参考原理图和接线图接线是一位港机电气控制工程师从事港口机械电气控制系统调试与维护的基本功。
因此在分析本册电气控制原理图前,请看懂本册原理图的通路标号、接线标号相关说明,以便快速地读懂原理图。
某型号起重机抓斗结构设计(全套图纸)

某型号起重机抓斗结构设计摘要:首先要对起重机抓斗进行自重分配,对抓斗的结构进行设计以及计s 算,然后对抓斗进行受力分析,其次,对抓斗进行验算校核,最后根据设计参数对抓斗进行三维建模以及绘制二维工程图。
关键词:抓斗;参数;校核;三维建模Grab a certain type of crane designAbstract:We must first carry out weight distribution of the crane grab,grab the structure of the design and calculation, then grab stress analysis, and secondly, to grabwere checking verification, according to the final design parameters for grabs three-dimensional construction mold and drawing two-dimensional drawings.Main glossary:Grab;parameter;Checked;Three-dimensional modeling目录摘要 (Ⅰ)Abstract (Ⅱ)目录 (Ⅲ)1 绪论 (1)1.1 抓斗的概述 (1)1.2 抓斗的发展趋势 (2)1.2.1 国内起重机抓斗发展趋势 (2)1.2.2 国外起重机抓斗发展趋势 (3)1.3 抓斗的分类 (4)2 抓斗方案的确定 (8)2.1 抓斗的选用 (8)2.3 抓斗的结构 (9)2.4 抓斗的工作原理 (9)3 抓斗的结构设计及计算 (11)3.1 抓斗的主要技术参数 (11)3.2 抓斗自重的确定 (11)3.2.1 抓斗抓取能力的影响因素 (11)3.2.2 抓斗的自重 (12)3.2.3 抓斗自重的分配 (12)3.2.4 颚板宽度 (13)3.2.5 抓斗的最大开度 (14)3.2.6 抓斗的其他几何参数 (15)3.2.7 抓斗颚板侧面形状 (15)3.2.8 滑轮组的倍率 (18)3.3 抓斗各部分的具体参数 (18)3.3.1 上承梁具体参数 (18)3.3.2 下承梁具体参数 (18)3.3.3 滑轮支撑体具体参数 (18)3.3.5 颚板具体参数 (19)3.3.6 滑轮 (19)3.4 抓斗的验算 (19)3.4.1 对抓取能力进行验算 (19)3.4.2 对颚板的强度进行校核 (20)3.4.3 颚板跟撑杆链接处连接轴的校核 (21)3.4.4 对连接螺栓M48强度校核 (21)3.4.5 对撑杆强度进行校核 (22)3.4.6 对滑轮组轴强度进行校核 (22)4 对零件三维建模 (23)4.1 SoidWorks软件的简介 (23)4.2 SolidWorks软件常用工具栏 (23)4.2.1 标准栏 (23)4.2.2 视图工具栏 (24)4.2.3 草图绘制工具栏 (24)4.2.4 特征绘制工具栏 (24)4.3 对抓斗实体进行三维建模 (24)4.3.2 下承梁建模 (27)4.3.3 撑杆建模 (28)4.3.4 垫圈建模 (29)4.3.5 滑轮建模 (30)4.3.6 颚板1建模 (31)4.3.7 颚板2建模 (33)4.3.8 滑轮装配体 (34)4.3.9 抓斗装配体 (35)4.4 对各零件绘制二维工程图 (35)4.4.1 撑杆二维工程图 (35)4.4.2 上承梁二维工程图 (36)4.4.3 下承梁二维工程图 (37)4.4.4 滑轮支撑体二维工程图 (37)4.4.5 垫圈二维工程图 (38)4.4.6 滑轮二维工程图 (39)4.4.7 颚板二维工程图 (39)4.4.8 抓斗二维工程图 (41)参考文献 (43)致谢 (45)1 绪论1.1 抓斗的概述抓斗,英文名叫grapple,俄文名叫грейфер;是对物料实施抓取和卸掉物料的一种吊具,抓取和卸掉物料一般是要靠它的左右两个合斗或者多个颚板的开合来实现的。
桥式抓斗起重机电气控制系统

桥式抓斗起重机电气控制系统机(简称桥抓)把各种辅材抓到各自的小仓,桥抓中各电动机使用凸轮操作控制接触器及变阻器的方式,问题很多,大大影响了正常生产。
笔者根据变频器、PLC广泛使用所表现出的优良性能,并考察某厂小型桥式起重机改造的方法,对我公司5000t/d生产线生料调配站的16t大型桥式抓斗起重机电气控制系统进行了改造。
关键词:桥式;抓斗起重机;电气;控制系统1原控制方式存在的问题1.1桥抓的结构组成桥抓结构主要由4部分组成:大车及行走机构(15kW2)、小车及行走机构(7.5kW)、抓斗起升机构(90kW)及抓斗开合机构(90kW)。
其中,大车及小车机构属于平移机构,主要带动起升机构及物料进行平移行走,抓斗起升机构主要是拖动物料上下运动,而抓斗开合机构主要作用是抓取及释放物料。
1.2传统电力拖动系统的缺点该桥抓电气拖动系统采用绕线式异步电动机转子回路串接电阻调速方式,是起重机械中最常见的调速方法。
该方法在使用中存在以下问题:1)设备故障率高:因工作环境差,粉尘、腐蚀性气体极易对电动机滑环、碳刷及接触器等造成不良影响,加之电动机启动频繁,电流及机械冲击大,因此日平均故障率可高达数次。
2)控制线路复杂:电动机调速级数越多,需要接入的接触器与变阻器就越多,这使得控制线路十分庞大复杂,故障点多。
3)功率损耗大:转子回路串入电阻后,电动机转差变大,机械特性变软,以热能形式释放的电动机损耗功率增多。
4)机械方面:由于电动机启动频繁,电流及机械冲击大,造成桥抓钢丝绳经常断裂。
主梁及导轨振幅增大,设备人员极其不安全。
5)调速范围窄:由于调速范围小,从而造成速度稳定性差,无法长时间低速下放重物。
1.3实际生产中存在的问题生料调配站中的桥抓在运行过程中负载的变化十分复杂,在拖动过程中对转矩要求高,特别要求调速系统在低速包括零速时应能输出较大转矩(150%额定力矩),动态响应快,能承受四象限力矩的变化。
尤其是抓斗的卷扬和开闭电动机在使用过程中反复承受无数次的倒顺转操作,经常受强电流、大力矩冲击,对电动机和机械部件损伤较为严重,故障率高,严重影响生产。
50立方抓斗式挖泥船抓斗液压驱动控制系统分析设计(全套含CAD图纸)

摘要中国江河湖泊众多,海岸线长,航运历来是交通运输的重要方式,因此中国疏浚业对于挖泥船工作性能的要求日益增长,不仅要求生产率高,而且对于特定的工作环境,对于挖泥船也有特殊的性能要求,比方港珠澳大桥所用抓斗式挖泥船,就有自动平挖的功能要求。
为了实现挖泥船疏浚航道、挖泥清污的功能,液压控驱动控制系统那么是必须有的。
本文通过对各种挖泥船的学习和分析,依据抓斗挖泥船施工运行功能和操控要求,设计出了一种50立方抓斗式挖泥船抓斗液压驱动控制系统,该系统能实现抓斗的开闭,以及抓斗各种工位下的起升与下降,以及可靠制动,并具有缓冲措施;能实现回转台左右旋回以及起重臂的变幅运动;具有单独的液压马达与卷筒制动回路。
起升、回转以及变幅回路均采用闭式液压系统,执行元件都选用液压马达。
本设计考虑了抓斗式挖泥船工作过程中的各种工况,根据其工作要求,通过设计计算完成系统的设计选型。
关键词:抓斗式挖泥船;液压驱动控制,闭式液压系统。
ABSTRACTChina, which country has many rivers, lakes and long coastline, that is also the reason why shipping has been the mainly transport mode. Thus, demand of dredger working performance is gradually increased in China dredge section, it includes not only the high productivity, but also requires special performance in given work environment. For instance, the grab dredger, which was used to construct Hong Kong-Zhuhai-Macau Bridge demands automatic surface digging. In order to achieve the function of dredge mud and dredging trash-removal, that hydraulic drive control system is definitely the necessary condition,This paper according to studying and analysis of various dredger, in terms of dredger’s working function and operating requirement, this paper designs one 50 Stere Grab Dredger hydraulic drive control systems in order to operate and lift it, reliability of braking with impact mitigation; turning around of rotary table and variable traverse motion of cargo boom; individual hydraulic motor and brake circuit of coiling block. Lifting, rotation and trolleying loop recommend closed type hydraulic system, actuator uses hydraulic motor.This system design and model selection was finished by had taking all working condition of dredger into consideration, according to the working requirement and calculation.Keywords: Grab dredger; hydraulic drive control system; Closed hydraulic system目录摘要 (I)ABSTRACT (II)1绪论 (1)挖泥船的开展现状及其前景 (1)挖泥船的应用 (1)挖泥船的分类 (2)1.2 本文主要内容和结构 (5)2 液压系统设计 (6)工况分析及功能要求 (6)液压系统的主要设计参数 (6)制定系统原理图 (7)起升机构与回转机构液压原理图设计 (7)变幅机构液压原理图的设计 (8)液压马达与卷动制动回路的设计 (9)油源局部 (10)整体系统原理图 (10)选择的液压系统类型 (12)调压方式的选择 (12)顺序动作的选择 (13)调速方式的选择 (13)执行元件的选择 (13)3液压系统设计计算及元件选型 (14)起升回路的设计计算 (14)回转回路的设计计算 (17)变幅回路的设计计算 (19)补油回路的设计计算 (22)选择联轴器型号 (23)液压控制阀的选型 (24)液压辅件的计算及选型 (29)油箱设计 (33)液压控制装置的设计 (37)3.9 液压泵的安装形式 (37)4系统性能验算 (38)液压系统压力损失验算 (38)系统温升的验算 (40)5集成块设计 (43)块体结构 (43)集成块结构尺寸确实定 (43)抓斗起升回路集成块设计 (43)抓斗开闭及液压马达制动集成块设计 (46)6结束语 (48)总结 (48)展望 (48)心得体会 (48)参考文献 (50)致谢 (51)全套图纸加363963051绪论挖泥船的应用中国江河湖泊众多,海岸线长,水资源南多北少,水土流失严重,航运历来是交通运输的重要方式,同时就人口现状与增长而言,已无法再论地大物博,沿海地带吹填造地及治理、向海洋开展亦势在必行。
抓斗式清污机控制系统操作说明

抓斗式格栅清污机控制系统操作手册江苏华星电力环保设备有限公司2014.81 健康与安全任何时候现场立柱有急停箱可用在设备运转或可以在一个自动控制顺序下启动的情况下扶手和其它保护装置不能除去,维修时移动防护装置和护栏,设备重新工作时应复原。
“牢记自动运行是十分危险的因为设备有时会突然启动”当设备运转,或邻近渠道,不要一个人工作;禁止在悬挂重物下作业。
2 前言本控制系统是为拦污栅清污机配套的专用电气控制装置,用来控制清污机的运行。
适用于n面拦污栅的手动、自动清污工作。
3 概述3.1电气原理:本控制系统采用具有国际先进水平的可编程控制器(PLC)、并选用高可靠性元器件,因此具有结构合理、性能稳定、适用范围广等功能,能方便实现移动式清污机的自动或手动操作。
电气原理详见电气原理图。
3.2面板结构:面板结构详见面板布置图。
3.3 运行前的检查:3.3.1 定位用接近开关固定牢靠无松动,感应板位置正常。
接近开关检测面与感应板之间的距离为3mm,调试是已调整无需改动。
3.3.2 清污机耙斗齿条与拦污栅栅条间隔交错,但在齿条和栅条错位小于5mm时不影响清污运行。
3.3.3 清污机耙斗停在上限位。
抓斗卷筒钢丝绳卷绕整齐不乱,且钢丝绳无断股现象。
3.3.4电缆无破损、挂钩并在导槽内,电缆无脱落排列整齐。
3.3.5 各紧固螺丝无松动。
3.3.6 减速箱无漏油现象。
4 清污机操作运行清污机控制系统设有“手动、自动”二种工作方式,同时自动方式又分为就地自动和远程自动。
运行结束后,清污机耙斗必须停在“卸料”位置,有台风时应加固。
4.1 就地手动方式清污(主要用于调试,也可就地手动清污):“就地、远程”开关置于“就地”位置,“手动、停止、自动”开关置于“手动”位置。
手动控制设有就地电柜操作和遥控操作。
操作设备,首先打开抓斗并沿着导轨移动到清污区上部位置。
下降抓斗到达格栅底部当抓斗到达格栅底部时低限位感应开关动作将停止电机下降运行;如果遇到一个大件污物,抓斗将向前倾斜松绳感应开关动作下降电机停止运行。
25T无线遥控抓斗--操作使用手册
上海起帆抓斗制造有限公司
6
25T 无线遥控抓斗
6 运输 -----抓斗闭合后将油缸活塞杆头部跟上承梁固定后才能运输(见附图四)。 -----抓斗水平放置运输车辆时,由于液压系统有空滤器,应按照下乘梁两端向上箭头标
志“↑”放倒抓斗,以免液压油漏出,引起油液污染。起吊时应选择抓斗上乘梁上的 吊耳作为起吊点将抓斗吊垂直,切记不能直接将抓斗平衡架作为起吊点,否则会造成 抓斗油缸受侧向力变形。
25T 无线遥控抓斗
目
录
上海起帆抓斗制造有限公司
2
25T 无线遥控抓斗
1 主要技术参数
额定起重量
(t)
斗 容(物料安息角 350) (m3)
物料容重
(t/m3)
额定负荷量
(t)
自
重
(t)
滑轮外径
(mm)
钢丝绳规格
(mm)
滑轮组倍率
抓斗开闭行程
(mm)
抓斗闭合时外形尺寸 (mm)
抓斗打开时外形尺寸 (mm)
上海起帆抓斗制造有,为了增强刃口板的耐磨性,刃口板采用高耐磨材料。 ------为使抓斗在有限的自重下具有足够的刚度和强度,抓斗结构件主要板材均采用低合 金结构钢(16Mn)制造。
4 工作原理 ------抓斗闭合:当抓斗打开时,滑移座与上承梁接触而与下承梁是完全分开的。此时电 磁换向阀关闭,由于油缸的活塞杆与滑移座固接,缸筒与下承梁固接,所以此时油缸活塞 杆完全伸出。当要抓取货物时,起重机吊索下降,由于油缸活塞可单向导通,所以油缸活 塞杆能够收缩,滑移座随之下降(见附图三图 A)。当油缸活塞杆完全缩进后,滑移座也 完全落下(见附图三图 B)。然后起重机吊索上升,滑移座随之上升,由于油缸的电磁阀 处于常关闭状态,此时,油缸有杆腔被锁住,油缸处于闭合锁紧状态,在滑轮组的作用下, 滑移座上升带动下承梁渐渐向上并带动颚瓣闭合(见附图三图 C)。 ------抓斗开启:当需要打开抓斗时,只需按动遥控发射器的开关,打开油缸电磁换向阀, 使油缸有杆腔卸荷。油缸活塞杆分别在滑移座和下承梁的作用下被拉出,滑移座和下承梁 分开,抓斗打开(见附图三图 D)。控制油缸有杆腔的电磁换向阀由两路并联而成,第一 路电磁换向阀打开 1.5 秒后,接通第二路电磁换向阀,采用这种控制方式,可确保抓斗最 初打开无冲击,抓斗打开速度由慢渐快。 ------抓斗开闭的液压工作原理见附图六。 ------油缸结构原理图见附图七。
抓斗吊钩两用起重机遥控电路图-2011.4

23 X91 柜内接线端子排 TB-2512 422 X91 柜内接线端子排 TC-606 321 X91 柜内接线端子排 TC-4003 120 -9X31/-9X5/-9X03 模块化插座 AC30-4孔/3孔/2孔 1/1/1 19X92 柜内接线端子排 TB-2512 3 19 0H 启动指示灯 XB2EV443 (~230V) 1 装柜门 18X92 柜内接线端子排 TC-2006 4 18 SV/PV.PA 测量转换开关/表 LW5-16-HY4/2;44L1-450;500A 1/1/1装柜门 17-9X32/-9X6/-9X04 模块化插座 AC30-4孔/3孔/2孔 1/1/1 17 H1.H2 指示灯 XB2EV453/454 1/1 装柜门 169MF2 柜顶换气扇 Φ200;~220V 1 16 9MF1 柜顶换气扇 Φ200;~220V 1 159S02/9E02 门限位开关/柜灯 YBLX19-111/TC40-220V 1/1 15 9S01/9E01 门限位开关/柜灯 YBLX19-111/TC40-220V 1/1 142K13 开闭切电阻接触器 LC1-D205 M7C+LADN11C 1 14 9K2 桥照接触器 LC1-DT20 M7C 1 132K11.2K12 开闭切电阻接触器 LC1-D170 M5C+LADN11C 2 +LAD-T0=2 13 5K11~5K23 大车切电阻接触器 LC1-D80 M5C 6 +LAD-T0=2 122K1.2K2 开闭斗接触器 LC1-D300 M7C+LADN22C 2 +LA9-FJ970=1 12 5K1.5K2 大车接触器 LC1-D150 M5C+LADN22C 2 +LA9-D11502=1 111K13 起升切电阻接触器 LC1-D205 M7C+LADN11C 1 11 0KM.0KM’ 总接触器 LC1-D245 M7C+LADN40C 2 101K11.1K12 起升切电阻接触器 LC1-D170 M5C+LADN11C 2 +LAD-T0=2 10 5F1~5F4 过流继电器 JL15-60 4 按JC=15整定 91K1.1K2 起升接触器 LC1-D300 M7C+LADN22C 2 +LA9-FJ970=1 9 0F 总过流继电器 JL15-400 1 81KT.2KT 时间继电器 CAD-32 M7C+LAD-T0 2 8 0CT 互感器 BH0.66 I 30 500/5 1 72KA1~2KA3 小型继电器 RXM2LB2P7+RXZE1M2C 3 +RXZ410 7 FU1 熔断器 RT28N-32X/3P 10 1 61KA1~1KA3 小型继电器 RXM2LB2P7+RXZE1M2C 5 +RXZ410;2只备用 6 0K00.5KA1~5KA3.9K1 小型继电器 RXM2LB2P7+RXZE1M2C 7 +RXZ410; 2只备用 51KA0 中间继电器 CAD-50 M7C 1 +LADN20C 5 1KA0.3KA0.5K00 中间继电器 CAD-32 M7C+LAD20C 3 41K00.1K01 中间继电器 CAD-32 M7C 2 4 0KV 相序继电器 RM4-TG20 1 31F1~2F2 过流继电器 JL15-200 4 按JC=15%整定 3 0Q2.0Q3.5Q2 小型断路器 C32N 2P C10 3 212Q2 小型断路器 C32N 2P C10 1 2 5Q1 大车机构断路器 NSC100S3100 1 1 1Q1.2Q1断路器 NSC250S3250 2 1 0Q1 总断路器 NSC400K3400+AUX 1 序 代 号 名 称 型号 规格 数量备 注 序 代 号 名 称 型号 规格 数量备 注+A2 抓斗控制柜 [室内;IP54柜体]+A1 总电源,大车组合控制柜 [室内;IP54柜体] 设计周 峰 标准 审查叶贤送 审定 陈中革 工艺 梅伟峰 日期 2011.4. 名 称 电气设备(元件)明细表 图 号 QN 11.1631.4.2 浙江三港起重电器有限公司 项 目邢钢 QN 16/3.2t 抓斗+吊钩两用桥式起重机S: 31.5 m H: 20/22 m A6 遥控 银川起重机器股份有限公司 YINCHUAN LIFT MACHINERY CO.,LTD. 质量 比例 张数 2 张次 120电线,电缆 见另表 ☆ 19 9T隔离变压器 JMB8KVA-380/220.36=500 1 ☆ 19 X93 柜内接线端子排 TB-2512 2 18 9H1~9H4防震投光灯 ~220V;400W; 4 ☆ 品牌待定 18 X93 柜内接线端子排 TC-403 3 17Φ4软钢丝绳 40m ☆ 17 X93 柜内接线端子排 TC-603 3 16M4钢丝绳夹头 24 ☆ 16 9MF3 柜顶换气扇 Φ200;~220V 1 15电缆滑车 CH-II 型电缆滑车 12 ☆ 其中首终端各1件 15 9S03/9E03 门限位开关/柜灯 YBLX19-111/TC40-220V 1/1 14 -X51.-X61接线箱(底座H150) 450*450*200;装相应线排 2 ☆ 装3孔/2孔插座 14 13 S91~S95门限位器 YBLX-CK/J 10541 5 ☆ 配底板 13 4K11~4K13 小车切电阻接触器 LC1-D40 M7C 3 +LAD-T0=2 12 5S1.5S2大车限位器 LX33-11 2 ☆ 上海龙井电器 12 4K1.4K2 小车接触器 LC1-D40 M7C 2 +LA9-D4002=1 11 4S1.4S2小车限位器 LX33-11 2 ☆ 上海龙井电器 11 3K11~3K13 副钩切电阻接触器 LC1-D40 M7C 3 +LAD-T0=2 10 1S1.2S1.3S1升降限位器 QGX-B 3 ☆ 上海龙井电器 10 3K1.3K2 副钩接触器 LC1-D65 M7C 2 +LA9-D4002=1 9 A0双摇杆遥控器 FST 516 M2 1 ☆ HBC 9 4KA0~4KA3 小型继电器 RXM2LB2P7+RXZE1M2C 3 +RXZE410 8 5R1.5R2大车1#2#电阻器 RK54-200L-8/2Y 2 ☆ 8 3KA1~3KA3 小型继电器 RXM2LB2P7+RXZE1M2C 5 +RXZE410;2只备用 7 4R小车电阻器 RK54-160M2-6/1B 1 ☆ 7 4F1.4F2 小车过流继电器 JL15-30 2 按JC=15%整定 6 3R副起升电阻器 RT54-160L-6/2B 1 ☆ 6 3F1.3F2 副钩过流继电器 JL15-40 2 按JC=15%整定 5 1R.2R抓斗电阻器 RZ54-315M-10/6D 2 ☆ 5 3K00.4K00 中间继电器 CAD-32 M7C 2 4 5M1.5M2大车1#2#电机 YZR 200L-8/15KW 2 S3;JC=40% 4 3KA0 中间继电器 CAD-50 M7C 1 3 4M小车电机 YZR 160M2-6/7.5KW 1 S3;JC=40% 3 3Q2.4Q2 小型断路器 C32N 2P C10 2 2 3M副起升电机 YZR 160L-6/11KW 1 S3;JC=40% 2 4Q1 小车断路器 NSC60E3032 1 1 1M.2M起升,开闭斗电机 YZR 315M-10/75KW 2 S3;JC=40% 1 3Q1 副钩断路器 NSC60E3050 1 序 代 号 名 称 型号 规格 数量备 注 序 代 号 名 称 型号 规格 数量备 注部分) 其它电气设备(元件)+A3 副钩,小车组合控制柜 [室内;IP54柜体] 设计周 峰 标准 审查叶贤送 审定 陈中革 工艺 梅伟峰 日期 2011.4. 名 称电气设备(元件)明细表 图 号 QN 11.1631.4.2 浙江三港起重电器有限公司项 目 邢钢 QN 16/3.2t 抓斗+吊钩两用桥式起重机S: 31.5 m H: 20/22 m A6 遥控 银川起重机器股份有限公司 YINCHUAN LIFT MACHINERY CO.,LTD. 质量 比例 张数 2 张次 2。
港口电气设备

三、变幅机构—保护措施
1、熔断器3FU1为第二级制动器电气设备的短路 保护; 2、热继电器3FR1作电动机3YM2的过载保护; 3、主电路中的3KI1、3KI2作过流保护; 4、为防止电源短路,在3KM1与3KM2之间的电气 联锁保护; 5、主令3SA和4SA的K1触头与3KA配合构成了零位 保护和失压保护; 6、限位开关3SQ1与3SQ2是变幅机构的增幅、减 幅限位保护。
MW5、LMC型起重电磁铁 吊运钢带卷板用起重电磁铁吊运 钢管的起重电磁铁吊运薄板的起 重电磁铁吊运型钢、初轧钢等条 状物料的起重电磁铁。 MW5
二、起重电磁铁控制电路图
起重电磁铁控制电路图
QS KM1
R4 R3
KM2
QS
FU1 YA
KM1
R2
FU1
KM2 KM1
R1
FU2
KM2
KM1 KM1
SA
K3
1SQ1 2SQ1 1KT1
2KM2
K4
1SQ2 2SQ2
3ZK
1KM1 2KM1 1KM1 2KM1
1KM1 2KM1 1KM5 1KM6 1KM5 1KM6 1KM7 1KM6 1KM6 1KM7 1KM8 1KM7 1KM7 1KM8 1KM9 1KM8 1KM8 1KM9 1KM9 1KT3
M10-30型门机供电线路图
10-2
一、起升机构主电路
1FU1
10-9
1T2
1FU2 1KM10 1T1
1QS1
1KI1
1KI2
1KI2
2KI1
2KI2
1KM2
1KM1
1KM3 1FU3
2KM3
2KM1
2KM2
桥式抓斗小车各部分部件的工作原理
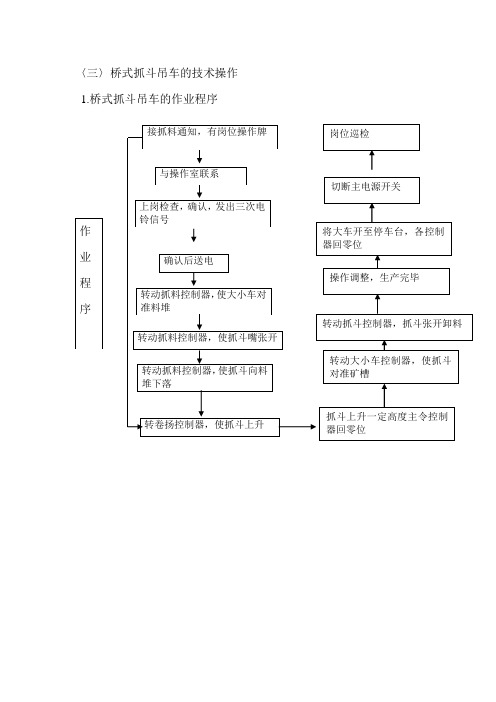
〈三〉桥式抓斗吊车的技术操作1.桥式抓斗吊车的作业程序桥式抓斗小车各部分部件的工作原理〈一〉一、ED系列电力液压推动器工作原理:〈如下图〉1.推动器电源接通,电机旋转带动叶轮转动产生压力油、推动活塞及连杆向上运动,在达到预定行程后并维持其推力。
2.电源断开,电机及叶轮停止转动不再产生压力油、活塞及连杆在外力作用下恢复原位。
二、安装与调整1.推动器出厂时,工作油液已装好,可直接使用,由于油的减少会引起推动器技术数值的改变,甚至不能启动,所以未经许可禁止打开注油螺塞或溢流螺塞。
2.推力器一般为垂直安装〈电机应在下方〉、也可倾斜或水平安装,但必须注意,倾斜或水平安装应使平衡器室朝上。
必须保证推动器整体能够摆动,活塞杆不允许承受径向力。
3.推动器连杆都可以选装,底座可做90度旋转。
ED23—ED30睇左旋转后中心高加长8mm。
4.接线时,电缆应通过填料函进入接线盒,拆下推动器接线盒盖〈反面有接线图〉,对照名牌参数按要求接好三相交流电源〈相序无要求〉及接好内外地线,(电源线电缆线规格不得大于4×2.5平方毫米)。
然后盖好接线盒盖,拧紧螺钉。
5.根据用户要求可加装时间调节阀。
调节前拧掉标“S”和“H”的盲塞,然后旋转调节螺杆进行上升时间和下降时间的无级调整。
螺杆旋进(向右旋)=行程时间增大,螺杆旋出(向左旋)=行程时间缩短。
并应注意最大调节量为20转,装有阀的推动器在出厂时行程时间以调整为5秒,调整后盲塞要拧紧。
三、使用与维护1.定期检查推力器的工作是否正常。
2.接线是否牢固,以免振动器出现短路,缺相以致烧坏电机。
3.每六个月检查一次油液,当油液变质或混入杂物时应该换油。
油液不足应补足油液(油号见注油标牌2),用户可从注油螺塞(5)加注,不得超过溢流螺塞(3)的位置。
应注意,在注油过程中,上下拉动推杆几次,以便排出空气,使油液充实油腔。
4.在工作状态下,活塞的最下端位置应与缸底保持一定距离(一般不小于5mm),否则会影响正常工作。
双绳抓斗起升电气控制系统

双绳抓斗起升电气控制系统吴昆【摘要】为了提高系统功率因数,稳定系统电压,节约能源,改善电能质量,将旧的直流驱动系统升级改造为交流变频驱动系统.通过交流变频驱动系统的应用,将所有的逻辑计算和控制功能通过变频器自身来实现,省略外部控制设备,使得电气控制系统大大简化.该改造更易于对旧起重设备的改造,小型起重设备也可通过装备此设备获得较多的功能,同时降低了电气驱动控制系统的成本.【期刊名称】《起重运输机械》【年(卷),期】2016(000)005【总页数】3页(P96-98)【关键词】双绳抓斗;变频器;PLC;角度同步;负载平衡控制;编码器【作者】吴昆【作者单位】上海振华重工(集团)股份有限公司上海200125【正文语种】中文【中图分类】U653.929.+1直流驱动电机驱动抓斗工作,这些设备均为感性负荷,工作过程中需吸收大量的无功功率,造成功率因数过低(一般在0.6左右),增加企业电能费用支出。
其中设备的工作模式在启动、稳定工作、停止工作之间不断变化,造成系统无功功率变化波动,引起电网电压波动,严重时影响带载设备的安全运行,降低生产效率。
同时设备在工作时会在系统中产生大量高次谐波,主要为5、7、11、13、17、19、23、25次等特征谐波,电流畸变率在40%左右,大量的谐波导致电网出现电压畸变,电流波动大,供电质量差等现象,造成电能质量下降,影响其他设备的正常运行和工艺质量,给企业带来经济损失。
为了提高系统功率因数,稳定系统电压,节约能源,改善电能质量,将原直流驱动系统升级改造为功率因数高且自带滤波装置的交流变频驱动系统。
将双绳抓斗起升电气控制系统原直流驱动改造为交流变频驱动系统,之前使用的相关控制功能需保留并拓展。
原使用的PLC装置不能再使用,要求全部逻辑必须通过变频器自带的PLC来实现。
以下运行要求均已实现:1)打开抓斗角度同步。
2)开闭抓斗负载平衡控制(关闭机械装置,假设过载20%)。
3)开、闭抓斗,开闭起升必须比支持起升更快或更慢运行,需考虑其运动方向(提升和下降抓斗)。