切割阻力
综掘机掘进技术经验总结

综掘机掘进技术经验总结综掘机掘进技术经验总结综掘机掘进技术经验总结一、综掘机切割顺序1、传统的切割顺序一般为:切割头先从巷道底板横向切割,然后切割头呈“S”型向顶板方向,从上帮到下帮来回切割。
2、改进技术后切割顺序为:1)煤层倾角小于15度时,切割头先在煤岩结合处的煤层一侧开始掘进,沿煤岩结合处煤线横向切割,先破煤,增加破岩的自由面,后破岩。
2)煤层倾角大于15度时,切割头在首次横向切割(水平摆动)之前,先在断面内挖掘一个窝槽,控制好切割截深。
在窝槽开掘过程中,转动着的切割头,依靠掘进机行走履带向前移动,同时继续地左右摆动,完成掏槽工作。
窝槽完成后,水平摆动转动着的切割头沿巷道断面的宽度方向水平切割,开掘横槽,接着往回摆动切割头,继续进行水平切割。
重复以上动作,完成整个断面的切割工作。
3、根据煤层顶、底板的岩性,确定破顶板或底板煤层顶板为砂质泥岩,薄层状,水平纹理,裂隙,滑面发育,断口平坦,易破碎。
煤层底板为粉砂岩,泥岩较薄,而粉砂岩为粉砂结构,具水平纹理,不易破碎。
在掘进过程中,选择破顶板。
4、根据煤层顶板的破碎情况,先破多或破少如煤层顶板破碎先切割断面的1/3,控制好顶板,再切割其余部分。
如煤层顶板不破碎,顶板好控制,先切割断面的2/3,再切割其余部分。
这样便于顶板管理。
5、底板腿窝超前挖掘1)综掘机截割底板时,尤其架棚支护,迎头的两腿窝通常是截割“死角”,截割不到,挖掘完后,迎头工一般都要用风镐或手镐人工掏腿窝,工作量和施工难度都较大。
2)经过掘进中摸索总结,发现综掘机截割断面时,在每一个截割循环结束前,可以先把迎头的两腿窝挖出,迎头工只简单地用风镐或手镐人工掏掏腿窝,就可以解决。
节省了掏腿窝时间。
又解决了迎头工长时间在临时支护下,掏腿窝作业不安全的问题。
、6、控制好切割阻力,切割头及时回转综掘机向前掘进,尤其向前掏窝槽时,不要使切割臂处于左、右极限位置,因切割臂处于极限位置时,转台里的齿条和齿轮得不到溢流阀的安全保护,综掘机前移时煤壁或岩壁作用在切割臂上的反作用力会损坏齿条和齿轮,所以,综掘机向前掘进前要先将切割臂从左、右极限位置向内侧收回150200毫米。
切切割阻力——精选推荐
第五章收割机械第一节概述收割机械是谷物收获机械的重要组成部分,谷物收获是农业生产过程中最为复杂的工艺过程,为了更好地了解谷物收获机械化所使用的设备,我们必须首先了解谷物收获的方法。
谷物的收获方法很多,大多是根据不同地区的不同的自然条件,不同的种植方式、经济结构、技术水平等来决定合适的收获方法。
目前全世界关于谷物的收获方法大致有三种方法:一、谷物的收获方法1、分别收获法:用多种相对独立的机械(收割机、运输车、脱粒机、扬场机等)分别对作物完成收割、运输、脱粒、清选等作业的方式。
这种方法在西方发达国家已经完全淘汰,但在发展中国家仍在大量使用。
其特点是设备简单、技术水平低、价格低廉、维护保养简便,但作业周期长、收获积累损失大。
2、联合收获法:利用联合收获机一次完成作物的收割、脱粒、分离和清选等多项作业的方式。
特点:生产率高、作业周期短、积累损失小、作业质量好。
设备投资大、机器利用率低、技术水平要求高。
3、两段收获法:先利用割晒机进行收割,待晾晒3~5天后用带有捡拾器的联合收获机进行捡拾、脱粒、分离和清选作业的方式。
特点:谷粒饱满、产量提高、作业周期长、设备投资大。
另外尚有一种割前脱粒法:利用割前脱粒式联合收获机进行先脱粒后切割或不切割作物茎秆的方式。
特点:脱粒负担大大减少、机器结构简化,但收获损失较大。
目前该机型工作质量有待提高,普及程度很小。
脱粒轮风机清粮机构割前脱粒式联合收获机机构简二、谷物的机械收获系统谷物的机械收获系统分别收获法联合收获法两段收获法割前脱粒收运脱扬机联割联机粒割联前机收脱在收获机械部分中,本课程将着重介绍收割机械、脱粒机械、联合收获机械总体参数等内容。
第二节收割机械的类型和一般结构一、一般类型1、按照茎秆的放铺方向:收割机和割晒机收割机械工作时主要完成谷物的切割和放铺两道工序,按照放铺的方向不同,又可分为收割机和割晒机两种机型。
收割机——收割机工作时,被割刀切断的谷物茎秆形成与前进方向呈900的转向放铺,以便于捡拾和打捆。
农业机械学(下)复习题及答案
第九章收割机1、谷物机械化收获的方法。
2、收割机的一般构造和工作过程,拾禾器按结构分类有几种?简述伸缩扒指式拾禾器的工作过程。
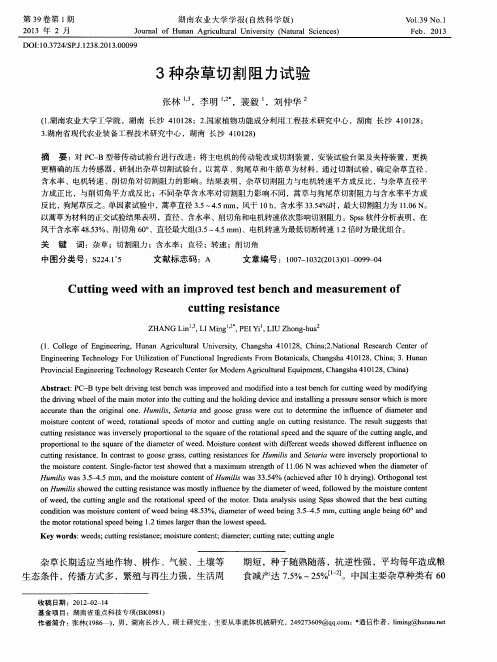
3、茎杆物理机械性质及其与切割的关系(有支撑切割、无支撑切割的形式)。
茎秆的纤维方向与切割的关系。
4、往复式切割器的结构、型式和特点。
5、往复式切割器切割图的绘制.6、圆盘式切割器的特点。
(如刀片和刀盘体的连接形式)7、往复式切割器的工作原理和参数分析(如刀片几何形状分析、切割速度分析)。
往复式切割器传动机构常用的种类。
8、试作图分析茎秆在动刀片和定刀片中被夹持住的条件.9、当割刀的传动机构为曲柄连杆机构时,试在直角坐标系下进行割刀的运动分析。
P1810、割刀惯性力的平衡形式。
11、简述收割机上拨禾器有哪些作用?常用的拨禾器有哪些种类?10、偏心拨禾轮的结构、特点。
11、拨禾轮的工作原理和参数确定.拨禾轮压板的工作原理和参数设计以及拨禾轮的调节要求。
(作业)12、扶禾器拨齿的扶禾作用及其运动轨迹。
13、输送带的速度如何确定.14、双带卧式割台的转向放铺原理。
禾秆放铺角由哪些转角合成?第十章脱粒机械1、脱粒装置的分类,全喂入式与半喂入式区别。
2、脱粒装置有哪些技术要求,脱粒原理有哪些?常用的几种组合是哪些?3、纹杆滚筒式脱粒装置、。
简述其组成及工作过程.(图10-7)4、纹杆滚筒构造及脱粒装置的调节.5、纹杆滚筒脱粒速度与间隙。
6、影响纹杆滚筒生产率的因素有哪些?7、钉齿滚筒的组成及其工作过程(图10-21)。
钉齿在滚筒上的排列原则,凹板的形式及其组合式凹板的包角.画出凹板上下调节量H与齿侧间隙变化量δ∆的关系图.8、双滚筒脱粒装置的特点及其工作过程.(图10-26)9、轴流滚筒式脱粒装置的结构、类型及横向轴流脱粒装置的工作过程(图10-27)、立式轴流脱粒装置的工作过程(图10-28) 10、轴流滚筒的形式有哪些?脱粒部件有哪些?凹板的型式有哪三种?螺旋导向板在顶盖的配置原则及视图表示(图10-33)。
锯片参数kerf-概述说明以及解释
锯片参数kerf-概述说明以及解释1.引言1.1 概述锯片是工业生产中常用的切割工具,在各个领域都有广泛的应用。
锯片参数是指刻度锯片的一些重要性能指标,例如锯齿间距、锯齿形态、锯齿形状等。
这些参数的不同取值会直接影响到锯片的切割效果和切割质量。
因此,了解和掌握锯片参数对切割效果的影响,对于正确选择和使用锯片至关重要。
本文将对锯片参数的定义进行详细阐述,并深入探讨锯片参数在切割过程中的作用机理。
首先,我们将介绍锯片参数的基本概念和常见定义,以帮助读者更好地理解本文的内容。
然后,我们将重点讨论锯片参数对切割效果的影响,包括切割速度、切割质量和切割精度等方面。
通过对实验结果和理论分析的综合研究,我们将揭示不同锯片参数与切割效果之间的内在联系和相互影响。
本文旨在总结锯片参数对切割效果的重要性,为读者提供选择合适锯片参数的依据和指导。
同时,我们也将探讨未来锯片参数的研究方向,以期能够进一步拓展锯片参数在切割领域的应用。
通过深入研究锯片参数的定义和影响机理,我们相信读者将对锯片参数的重要性有更清晰的认识,并能够在实际工作中正确选择和运用锯片参数,以提高切割效果和工作效率。
本文将为读者提供一个全面而深入的了解锯片参数的平台,并为未来的研究提供新的思路和方向。
1.2 文章结构文章结构本文共分为引言、正文和结论三个部分来阐述锯片参数kerf的相关内容。
引言部分首先概述了本文的研究对象——锯片参数,介绍了锯片参数的概念和意义。
随后,文章结构部分将对整篇文章的组织结构进行说明,以帮助读者更好地理解文章的内容和框架。
最后,引言部分明确了本文的研究目的,即探讨锯片参数对切割效果的影响。
正文部分分为两个小节。
首先,2.1小节将详细定义了锯片参数,并介绍了锯片参数的相关概念和常用的参数类型。
接着,2.2小节将讨论锯片参数对切割效果的影响。
通过具体案例和实验数据的分析,探讨了锯片参数与切割效果之间的关联性,揭示了参数调整对切割结果的影响机理。
农业机械学试题
农业机械学试题第一章.耕地机械-练习题一、名词解释1.犁体曲面:由犁铧和犁壁共同构成的犁体的工作曲面,起切上、翻土和碎土作用。
2.犁体三支点:由铧尖、铧翼、梨踵三点构成了犁体的支持面。
3.入土行程:犁在地头入土时,从第一铧开始入土,到最后一铧入土到规定耕深所前进的距离。
4.垂直间隙:铧尖和犁踵之连线与水平台面沟底之间构成的间隙,此间隙使犁容易入土,并保持耕深稳定。
5.水平间隙:铧尖和犁踵之连线与铅垂面之间构成的间隙,此间隙保持犁的耕宽稳定。
6.圆盘倾角:圆盘平面与铅垂面之间的夹角。
二、填空题1.犁体是由(犁铧、犁壁、犁侧板、犁托、犁柱)组成。
2.三角形犁铧有两刃口,一个是(铧刃),一个是(胫刃)。
3. 根据设计方法和工作性能的不同,犁体曲面可分为(翻垡型、窜垡型、通用型)等型式。
4.牵引铧式犁的起落与调节机构包括(地轮机构、沟轮机构、尾轮机构)。
5.旋耕机的工作部件由(拖拉机动力输出轴)驱动,用高速回转的(刀片)铣切土壤。
6.旋耕机的传动方式有(中间传动、侧边齿轮传动、侧边链轮传动)。
7.旋耕机的碎土性能由(机器前进速度、刀轴转速)确定。
三、判断题1.梯形铧是铧式犁使用较多的一种犁铧(×)。
2.采用栅条式犁壁主要是为了节省钢材(×)。
3.活动犁踵装在多铧犁最后一铧的犁侧板上(√)。
4.沟轮机构由地沟轮联系机构与水平调节机构组成(√)。
5.牵引器上的安全装置用来保护犁体在遇到过大阻力时不被损坏(√)。
6.旋耕机的碎土作用主要靠挡土罩和平土拖板来完成(×)。
7.弯刀切口切削土壤时,先由正切刃切削,再由侧切刃切削(√)。
8.圆盘犁耕后沟底不平,其不平度不应超过耕深的1/2(√)。
9.双向犁的优点是:耕后地表平整,无沟垄(√)。
四、选择题1.使用小前犁可提高主犁体的(B)。
A.碎土质量B。
覆盖质量C。
翻土质量2.使用铧式犁开荒时应采用(C)犁体。
A.窜垡型B。
通用型C。
翻垡型3.栅条式犁壁适用于耕(A)。
刀的切割工作原理

刀的切割工作原理刀的切割工作原理是利用刀刃的锋利边缘对物体施加压力和剪切力,实现将物体分割为两个或更多部分的过程。
刀具是用来切割的工具,广泛应用于工业制造、家庭生活以及医学和手术等领域。
刀刃的锋利边缘是刀具切削的关键部分。
刀刃通常由高硬度、高耐磨的材料制成,如高速钢、碳化硅、氧化锆等。
这些材料具有优异的硬度和切削性能,能够有效地切割各种物体。
刀的切割原理包括割裂、剪切和挤压等过程。
割裂是指刀刃对物体的冲击和切削,通过割断物体内部的连接结构来实现切割。
剪切是指刀刃在物体表面施加剪切力,使物体沿切割线产生滑动分离。
挤压是指刀刃在物体上施加压力,将物体挤压变形而实现切割。
刀具的切削形式包括拉切、压切和剪切等。
拉切是指刀具在物体上施加拉力,使物体发生断裂分离。
压切是指刀具在物体上施加压力,将物体连续压迫扭曲分离。
剪切是指刀具的两侧同时对物体施加反向的剪切力,使物体沿切割线产生剪切断裂。
刀的切割过程中,刀刃与物体之间需要克服切割阻力。
切割阻力包括摩擦阻力、变形阻力和黏附阻力等。
摩擦阻力是刀刃在物体表面与物体之间的阻力,与物体表面的粗糙度、润滑条件和刀具的材质有关。
变形阻力是指物体的可塑性造成的阻力,切割时需要克服物体的变形能力。
黏附阻力是指物体表面的粘附力,使刀刃在切割过程中容易粘附在物体表面。
刀的切割性能与刀具的几何形状、角度和刀刃的刃口质量有关。
切割性能主要包括切割力、切削速度和切割效率等。
切割力是指刀具对物体施加的力和压力,是刀具切削性能的重要指标。
切削速度是指刀具在单位时间内切削物体的长度,是切削效率的影响因素之一。
切割效率是指刀具单位时间内切削物体的能力,高效率的切割可以提高工作效率和生产能力。
在刀的切割过程中,还需要考虑一些因素,如切削液的使用和切削温度的控制。
切削液可以降低切削阻力,冷却刀具和物体,减少摩擦和热量的产生,提高切削质量和刀具寿命。
切削温度的控制可以避免物体过热和变形,保证切割质量和生产效率。
割草机
12
13
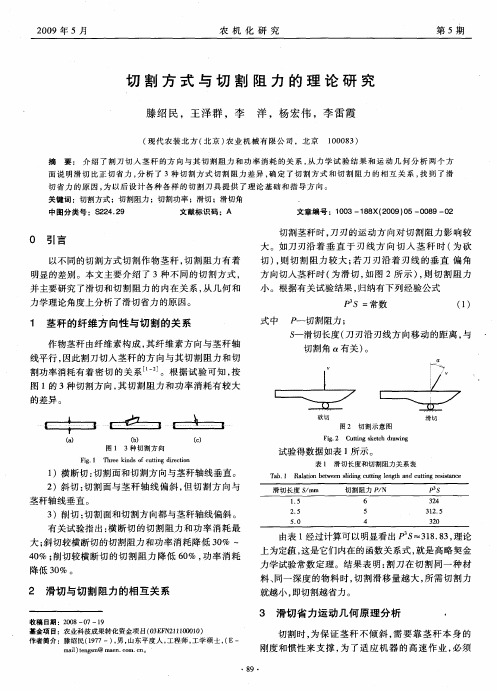
(1)切割器
14
刀 梁
螺 母
摩 螺 擦 栓 片
刀 杆
铆 钉
压 刃 器
铆 钉
动 刀 片
定 刀 片
护 刃 器
标准Ⅰ型切割器
15
往复式切割器结构简图
护刃器
压刃器 动刀片
定刀片
刀杆
摩擦片
16
整个切割器通过其内滑掌与挂刀架铰接,这样,切割器 可绕挂刀架转动,进而保证起落。
4. 割下的牧草应均匀铺放于地面上,尽量减少机器对牧草打击翻动, 且不许碾压已割和未割牧草。
5. 机器挂接迅速,操作方便,安全装置齐全,技术经济指标先进。
8
二、往复切割器式割草机
特点:
往复式割草机适于收获天然牧草和种植牧草,具有割茬低而整 齐、有支承切割,牧草损失少、功耗低、作业速度6-9km/h, 使用调整方便等优点,但生产效率低。 但当收获高产湿润牧草时,常出现堵刀现象;尤其不适合于切 割茎秆较粗的牧草,象豆科类牧草。 高速作业时由于曲柄转速增加而割刀惯性力增大,使机器振动 加剧,限制了生产率的提高。这种割草机虽然有一定缺点,但 目前仍被广泛应用,并在不断改进和完善。
9
(一)往复式割草机的类型和构造
往复式割草机按照切割器的数量可分为单刀和三刀割 草机,按照与拖拉机联接形式可分为牵引式和悬挂式, 悬挂式又可分为前悬挂、侧悬挂和后悬挂。 往复式割草机目前在我国使用较多,主要用于天然草 场的饲草收获作业,代表机型有9GJ-2.1型牵引式割草机 和92GQJ-2.1A型牵引式胶轮割草机等。 9GJ—2.1含义
17
而挂刀架又借助于前后拉杆所形成的可动机架与机架铰接, 这样切割器也可或随同可动机架绕主机架转动,以满足它适应 地形的要求。
第八章 收割机械

第一节 概 述 第二节 收割机和拾禾器 第三节 切割器 第四节 拨禾器 第五节 输送器和放铺机构
第一节 概 述
一、谷物收获方法 (一)分段收获法 用多种机械分别完成割、 捆、运、堆垛、脱粒和清选等作业的方法, 称为分段收获法。如用收割机将谷物割倒, 然后用人工打捆,运到场上再用脱谷机进 行脱谷和清选。
割刀平均速度
切割器在一个行程内的平均速度。
s s ns v p t 60 30
2n n • 2r nr
30 15
n—割刀曲柄转速转/分 r—割刀曲柄半径 S—割刀行程
4、割刀进距对切割性能的影响
割刀走过一个行程S时,机器前进的 距离称为割刀进距。
H
vm
60 2n
30v m n vm—机器前进速度
(一)往复式切割器
其割刀作往复运动,结构较简单,适应性 广。目前在谷物收割机、牧草收割机、谷物联 合收获机和玉米收获机上采用坡多。它能适应 一般或较高作业速度(6—10km/h)的要求,工 作质量较好,但其往复惯性力较大,振动较大。 切割时,茎秆有倾斜和晃动,因而对茎秆坚硬、 易于落粒的作物易产生落粒损失(如大豆收获)。 对粗茎秆作物,由于切割时间长和茎秆有多次 切割现象,则割茬不够整齐。
(二)往复式切割器的传动机构
其特点是把回转运动变为往复 运动。由于各种机器的总体配置 和传动路线不同,因此传动机构 的种类较多。按结构原理的不同,
可分为曲柄连杆机构、摆环 机构和行星齿轮机构等三种。
1、曲柄连杆机构
y A
ω
B
ωt
o
x
x
特点:机构简单、成本低廉、占据空间大。
2、摆环机构
特点:结构紧凑、铰链较少、工 作可靠、制造成本高。
臂式斗轮堆取料机回转驱动功率的分析与计算
一、 回转功率的计算
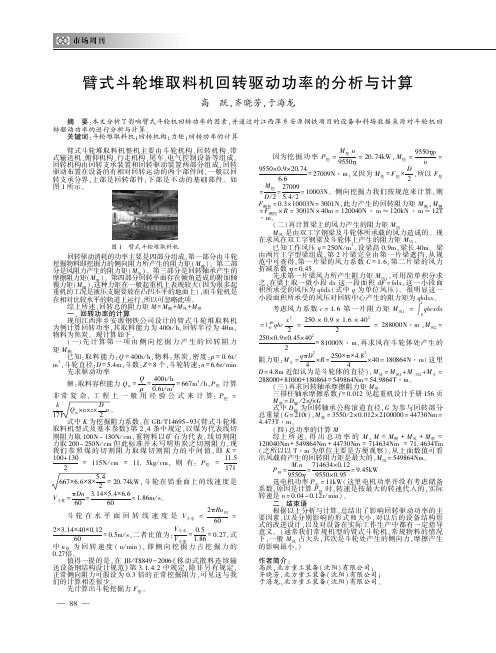
现用江西萍乡安源钢铁公司设计的臂式斗轮堆取料机
为例计算回转功率ꎬ其取料能力为 400t / hꎬ回转半径为 40mꎬ
物料为焦炭ꎮ 现计算如下ꎮ
( 一) 先 计 算 第 一 项 由 侧 向 挖 掘 力 产 生 的 回 转 阻 力
= 81000Nmꎬ再求风在斗轮体处产生的
2
qπD2
250×π×4( 这里
阻力矩:M 斗 =
4
4
D = 4.8m 近似认为是斗轮体的直径) ꎬM 风 = M 风1 +M 风2 +M 斗 =
288000+81000+180864 = 549864Nm = 54.9864Tmꎮ
矩 M侧
已知:取料能力:Q = 400t / hꎬ物料:焦炭ꎬ密度:ρ = 0. 6t /
m3 ꎬ斗轮直径:D = 5.4mꎬ斗数:Z = 8 个ꎬ斗轮转速:n = 6.6r / min
先求驱动功率
Q 400t / h
=
= 667m3 / hꎬP 挖 计算
解:取料容积能力 Q m =
ρ 0.6t / m3
在求风在双工字钢梁及斗轮体上产生的阻力矩 M 风 ꎮ
已知工作风压 q = 250N / m2 ꎬ设梁高 0.9mꎬ梁长 40mꎮ 梁
由两片工字型梁组成ꎬ第 2 片梁完全由第一片梁遮挡ꎬ从规
范中可查得ꎬ第一片梁的风力系数 C = 1.6ꎬ第二片梁的风力
折减系数 η = 0.45ꎮ
先求第一片梁风力所产生阻力矩 M 风1 ꎬ可用简单积分求
D / 2 5.4 / 2
F 侧挖 = 0.3×10003N = 3001Nꎬ此力产生的回转阻力矩 M 侧 ꎬM 侧
3种杂草切割阻力试验
反 比, 狗尾草反之。单因素试验 中,蒿草直径 3 . 5~ 4 . 5 i n n l , 风干 1 0 h , 含水率 3 3 . 5 4 %时 ,最大切割阻力为 1 1 . 0 6 N。 以蒿草为材料的正交试验结果表明,直径 、含水率 、削切角和 电机转速依次影响切割阻力 。S p s s 软件分析表明 ,在
风干含水率 4 8 . 5 3 %、削切角 6 0 。 、直径最大组( 3 . 5~ 4 . 5 l n n 1 ) 、电机转速为最低切断转速 1 . 2 倍 时为最优组合。
关
ቤተ መጻሕፍቲ ባይዱ
键
词 :杂草 ;切割阻力 ;含水率 ; 直径 ; 转 速 ;削切角
中图分类号 :¥ 2 2 4 . 1 5
P r o v i n c i a l E n g i n e e r i n g T e c h n o l o g y R e s e a r c h C e n t e r f o r Mo d e m Ag r i c u l ur t a l E q u i p me n t , C h a n g s h a 4 1 0 1 2 8 , C h i n a )
文献标志码 : A
文章编号 :1 0 0 7 — 1 0 3 2 ( 2 0 1 3 ) 0 1 — 0 0 9 9 — 0 4
Cut t i ng we e d wi t h a n i m pr o v e d t e s t be nc h a nd me a s ur e me nt o f c u t t i ng r e s i s t a nc e
Ab s t r a c t : P C- B t y p e b e l t d r i v i n g t e s t b e n c h wa s i mp r o v e d a n d mo d i i f e d i n t o a t e s t b e n c h or f c u t t i n g we e d b y mo d i f y i n g t h e d r i v i n g wh e e l o f t h e ma i n mo t o r i n t o t h e c u t t i n g a n d t h e h o l d i n g d e v i c e a n d i n s t a l l i n g a p r e s s u r e s e n s o r wh i c h i s mo r e
滚刀工作原理分析

滚刀工作原理分析盘形滚刀简称盘刀,是隧道掘进机滚压破岩常用的一种刀具型式,典型的盘刀一般由刀圈、轮毂和轴组成。
盘形滚刀在各类隧道掘进机上使用非常广泛,主要用于全断面岩石隧道掘进机、盾构及顶管设备。
过去盘形滚刀主要用于全断面岩石隧道掘进机刀盘破岩,随着隧道及地下工程的快速发展,所遇到地层复杂性逐渐增加,开始在盾构刀盘上使用盘刀(同时布置切刀和滚刀),形成所谓的复合式盾构,以应对各种软硬不均或富水地层,如砂卵(砾)石地层、风化岩地层及越江、跨海隧道的高水压地层_1]。
实践证明,这种盾构对地层具有良好的适应性,大大拓展了盾构的适用范围。
国际上现在有研发全能隧道掘进机的趋势,复合式盾构应该是全能隧道掘进机的一种雏型。
1 盘形滚刀的受力及破岩机理每把盘形滚刀在切割岩石的过程中,刀刃与岩石之间都存在3个方向的相互作用力:(1)法向推压力FN,指向开挖面,由刀盘的推力提供;(2)切向滚动切割力FR,指向滚刀切向,由刀盘转矩提供;(3)滚刀边缘的侧向力FIJ,由滚刀对岩石的挤压力和刀盘旋转的离心力所产生,指向刀盘中心,其数值较小,与其它2个力不属于同一数量级,一般不考虑。
3个方向的作用力见图1。
切向滚动切割力主要取决于推力、切深及滚刀直径。
盘刀直径一定,切深越大,所需滚动切割力越大;切深确定时,滚动切割力随盘刀直径的增大而减小。
刀盘工作时,滚刀先与开挖面接触,在推力作用下紧压在岩面上,随着刀盘的旋转,盘形滚刀一方面绕刀盘中心轴公转,同时绕自身轴线自转。
盘形滚刀在刀盘的推力和转矩共同作用下,在掌子面上切出一系列同心圆沟槽。
刀盘旋转并压人岩石的过程中,盘形滚刀对岩石将产生挤压、剪切、拉裂等综合作用,首先在刀刃下会产生小块破碎体,破碎体在刀刃下被碾压成粉碎体,继而被压密形成密实核,随后密实核将滚刀压力传递给周围岩石,并产生径向裂纹,其中有一条或多条裂纹向刀刃两侧向延伸,到达自由面或与相邻裂纹交汇,形成岩石碎片,整个过程如图2所示。
切割方式与切割阻力的理论研究
农 机 化 研 究
第 5期
切 割 方 式 与 切 割 阻 力 的 理 论 研 究
滕 绍 民 ,王 泽 群 ,李 洋 ,杨 宏 伟 ,李 雷 霞
( 代农 装 北 方 ( 京 ) 现 北 农业 机 械 有 限 公 司 ,北 京
摘
10 8 ) 0 0 3
要 : 介 绍 了割 刀切 人 茎 秆 的 方 向 与其 切 割 阻力 和功 率 消 耗 的关 系 , 力 学试 验 结果 和 运 动几 何 分 析 两 个 方 从
0 引 言
以不 同 的切 割方 式 切 割作 物茎 秆 , 割 阻 力 有 着 切
明显 的差 别 。本 文 主 要 介 绍 了 3种 不 同的 切 割 方 式 ,
切 割 茎秆 时 , 刀刃 的运 动 方 向对 切 割 阻力 影 响 较 大 。如 刀 刃沿 着 垂 直 于 刃 线 方 向 切 人 茎 秆 时 ( 砍 为
由表 1 过计 算可 以明显 看 出 P S 38 8 , 论 经 1.3 理
上为定值 , 这是它们内在的函数关 系式 , 就是高略契金 力学试验常数定理。结果表 明: 割刀在切割 同一种 材 料、 同一深度 的物料时 , 切割滑移量越大 , 所需 切割力
就 越小 , 即切割 越省 力 。
刃 为锯 齿形 ( 图 5所 示 ) 即使是 光 滑刀 刃 , 如 , 其微 观 几 何 形状 也高 低 不 平 , 面 布 满 了许 多 “ 观 齿 ” 当刃 上 微 。 口在切 向沿 材 料 产 生 滑 移 时 , 些 尖 锐 的 微 观 齿 就 会 这
物 理现 象 , 者讨 论 正 切 时刀 刃 的受力 情 况 。 笔
・
3 滑切省 力运 动几何原理分析
牛头刨床的综合与分析(课程设计说明书)
牛头刨床的综合与分析(课程设计说明书) 牛头刨床的综合与分析(课程设计说明书) 目录一、设计题目与原始数据一、设计题目与原始数据- - 1 1 - - 二、牛头刨床示意图二、牛头刨床示意图- - 2 2 - - 三、导杆机构设计三、导杆机构设计- - 2 2 - - 四、机构的运动分析四、机构的运动分析- - 4 4 - - 五、机构动态静力分析五、机构动态静力分析- - 9 9 - - 六、飞轮设计六、飞轮设计- - 1313 - - 七、设计凸轮轮廓曲线七、设计凸轮轮廓曲线- - 1515 - - 八、齿轮设计及绘制啮合图八、齿轮设计及绘制啮合图- - 1515 - - 九、解析法九、解析法- - 1616 - - 1.导杆机构设计.- 16 - 2.机构运动分析.- 17 - 3.凸轮轮廓曲线设计.- 19 - 4. 齿轮机构设计.- 22 - 十、本设计的思想体会十、本设计的思想体会- - 2222 - - 参考文献参考文献- - 2222 - - 附附录录- - 2323 - - 辽宁工业大学课程设计说明书(论文)- 1 - 一、设计题目与原始数据1.题目:牛头刨床的综合与分析2.原始数据:刨头的行程H=550mm 行程速比系数K=1.6 机架长LO2O3=400mm 质心与导杆的比值LO3S4/LO3B=0.5 连杆与导杆的比值LBF/LO3B=0.3 刨头重心至 F 点距离XS6=160mm 导杆的质量m4=15 刨头的质量m6=58 导杆的转动惯量JS4=0.7 切割阻力FC=1300N 切割阻力至O2的距离YP=175mm 构件 2 的转速n2=80 许用速度不均匀系数[δ]=1/40 齿轮Z1、Z2的模数m12=15 小齿轮齿数Z1=18 大齿轮齿数Z2=46 凸轮机构的最大摆角φmax=16º 凸轮的摆杆长LO4C=140mm 凸轮的推程运动角δ0=60º 凸轮的远休止角δ01=10º 凸轮的回程运动角δ0 =60º 凸轮机构的机架长Lo2o4=150mm 凸轮的基圆半径ro=55mm 凸轮的滚子半径rr=15mm 辽宁工业大学课程设计说明书(论文)- 2 - 二、牛头刨床示意图如图1 所示图 1 三、导杆机构设计1、已知:行程速比系数K=1.6 刨头的行程H=550mm 机架长度LO2O3=400mm 连杆与导杆的比LBF/LO3B=0.3 2、各杆尺寸设计如下A、求导杆的摆角:辽宁工业大学课程设计说明书(论文)- 3 - ψmax =180°×(K-1)/(K+1)=180°×(1.6-1)/(1.6+1)=42°B、求导杆长:LO3B1=H/[2sin(ψmax/2)]=550/[2sin(42°/2)]=776mm C、求曲柄长:LO2A =LO2O3×sin(ψmax/2)=400×sin21°=142mm D、求连杆长:LBF=LO3B×LBF/LO3B=776×0.3=233mm E、求导路中心到O3的距离:LO3M =LO3B-LDE/2=LO3B{1-[1-cos(ψmax/2)]/2}=750mm F、取比例尺:μL=0.005m/mm 在1#图纸中央画机构位置图,机构位置图见1#图纸。
农业机械学习题
一.填空题1.悬挂式机组的优点是机动性高,结构简单、重量轻,改善拖拉机的牵引性能。
2.犁体曲面是由犁铧和犁构成的曲面,犁体的切土、碎土和翻土作用都是由该曲面来完成的。
3.圆盘式耕作机械中,偏角对圆盘的切土、碎土、堆土和翻土有重要影响,该角较大时,圆盘的翻土、碎土能力增强,耕深亦较大,但牵引阻力亦随之增大。
4.种子的流动性用种子的自然休止角来表示,该角越小,表示流动性越好。
5.播种机按机械结构及作业特征来分,主要有谷物条播机、中耕作物点播机两大类。
6.涡流式喷头的结构特点是诱导药液开成旋涡的液流通道或孔道。
常用的涡流式喷头有切向斜孔式、涡流芯式、涡流片式和斜孔盘式等几种形式。
7.往复式切割器由往复运动的割刀和固定不动的支承部分组成。
其传动机构按结构原理的不同,可分为曲柄连杆机构、摆环机构、行星齿轮机构等三种。
8.链齿式拨禾器由带拨齿的链条组成,常见者有拨禾带、拨禾链、扶禾器等三种。
9.双带卧式割台中,禾秆的放铺角可看作是三个转角的合成,三个转角分别是台上转角、拖带转角和抛落转角。
10.谷物脱离穗轴的原理有打击、梳刷和揉搓及碾压等四种。
二.解释下列参数、概念或指标(每小题2分,共10分)1.悬挂机构:用拖拉机上的悬挂机构将作业机与拖拉机联结在一起成为作业机组,称为悬挂机组。
机组在在道路上行进或在地头转弯时,利用拖拉机的液压机构将作业机全部或局部提起。
2.圆盘耙的偏角:盘面与前进方向的夹角。
3.滑切:刀刃沿刃线的垂线偏一角度切入茎秆。
切割阻力较小。
4.轴流式脱粒装置:指出喂入方式和运动方式5.全喂入联合收获机:茎秆和穗头全部进入脱粒装置进行脱粒。
三.单项选择题(每小题1分,共10分)1.为保证耕作的稳定性,铧式犁犁体的耕宽与耕深之比应。
A 大于等于1.27 大于1/1.27 B 小于1.27 C 大于1.27 D 2.犁的牵引阻力是。
A 土壤作用在犁上的总阻力与耕地机组的动力性和经济性间接相关土壤作用在犁上的总阻力 B C 犁的主要性能指标之一。
减少切割阻力的方法
减少切割阻力的方法
切割阻力是在进行切割过程中所遇到的一种阻力,它会影响到
切割的效率和质量。
在工业生产和日常生活中,我们经常需要进行
各种材料的切割,因此减少切割阻力对于提高生产效率和节约能源
具有重要意义。
下面介绍一些减少切割阻力的方法。
1. 使用合适的刀具。
选择合适的刀具是减少切割阻力的关键。
不同材料需要使用不
同材质和刃口形状的刀具,通过选择合适的刀具可以降低切割时的
摩擦力,减小切割阻力。
2. 保持刀具锋利。
刀具的锋利度直接影响切割阻力。
使用钝钢刀具会增加切割时
的摩擦力,导致切割阻力增加。
因此,定期对刀具进行磨削和保养,保持刀具的锋利度是减少切割阻力的有效方法。
3. 控制切割速度。
过高或过低的切割速度都会增加切割阻力。
合理控制切割速度,使之与材料的性质和刀具的特性相匹配,可以有效减少切割阻力。
4. 使用适当的切割润滑剂。
在切割过程中使用适当的切割润滑剂可以减小切割阻力。
切割
润滑剂能够减少刀具与材料之间的摩擦力,降低切割阻力,同时还
能冷却刀具和材料,延长刀具的使用寿命。
5. 优化切割工艺。
对于不同的材料和切割要求,可以优化切割工艺,采用合适的
切割方式和工艺参数,减少切割阻力,提高切割效率和质量。
通过以上方法,可以有效减少切割阻力,提高切割效率,降低
能源消耗,延长刀具寿命,是在工业生产和日常生活中非常实用的
技巧。
农业机械综合试题与答案

农业机械综合试题与答案事业单位机械类试题农业机械试题(A)一、填空题(60个空,每空0.5分,共30分)1、耕地机械按工作部件的工作原理不同,可分为铧式犁、————————————————和————————————————等。
2、犁侧板的功用是支持犁体,—————————————————犁体工作时产生的侧压力。
3、悬挂犁的调整内容主要包括:犁的入土角和入土行程调整、犁架水平调整、————————————————和————————————————。
4、犁耕机组行走常用的方法有内翻法、外翻法和———————————————————三种。
5、旋耕机的耕作行走方法主要有————————————————、套耕法和回耕法。
6、外槽轮排种器的排种量主要取决于排种轮的————————————————和转速。
7、气力式点播排种器的类型有—————————————、气压式排种器和——————————————。
QQ:4451425308、农用水泵类型主要有叶片泵、—————————————————和其他类型泵。
9、离心泵的性能特点是流量小,——————————————————,适用范围较广。
10、喷雾机空气室的功用是蓄积能量和——————————————————。
11、谷物的三种收获方法是分别收获法、——————————————和————————————————。
12、脱粒装置按脱粒元件的结构形式不同分为___________________、弓齿式和———————————————三种类型。
13、纹杆滚筒式脱粒装置是以————————————为主、冲击为辅的脱粒原理进行工作的。
14、铧式犁主犁体一般由———————————、——————————、犁侧板、——————————、————————————和————————————等组成。
15、犁体曲面是由——————————————和——————————————共同组成的。
黄瓜抓持特性与末端采摘执行器
第26卷第7期农业工程学报V ol.26 No.72010年7月Transactions of the CSAE Jul. 2010 107 黄瓜抓持特性与末端采摘执行器研究钱少明,杨庆华,王志恒,鲍官军,张立彬※(浙江工业大学机械制造及自动化教育部重点实验室,杭州 310014)摘 要:为了设计用于黄瓜采摘的末端执行器,首先测定了黄瓜的抗压特性、表面摩擦系数和果柄切断阻力等物理特性。
针对黄瓜抓持模型进行了力学分析,建立了气动驱动器中的气压值与抓持能力之间的关系。
最后,研制了可用于黄瓜采摘的末端执行器,由抓持器和切割器组成,抓持器由2个基于气动柔性驱动器的弯曲关节构成,切割器由旋转气缸和刀片构成。
该采摘执行器机械结构简单,输出力较大。
试验结果表明:黄瓜抓持成功率为90%,黄瓜果柄割断成功率为100%,采摘时间为3 s。
该采摘执行器采摘黄瓜效果良好,具有较好的实际应用前景。
关键词:农业机械,机器人,研究,黄瓜,抓持特性,采摘执行器doi:10.3969/j.issn.1002-6819.2010.07.019中图分类号:TP242 文献标识码:A 文章编号:1002-6819(2010)-07-0107-06钱少明,杨庆华,王志恒,等. 黄瓜抓持特性与末端采摘执行器研究[J]. 农业工程学报,2010,26(7):107-112.Qian Shaoming, Yang Qinghua, Wang Zhiheng, et al. Research on holding characteristics of cucumber and end-effector of cucumber picking[J]. Transactions of the CSAE, 2010, 26(7): 107-112. (in Chinese with English abstract)0 引 言果品采摘作业是水果生产链中最耗时、最费力的一个环节。
盐坨单位切割阻力的试验
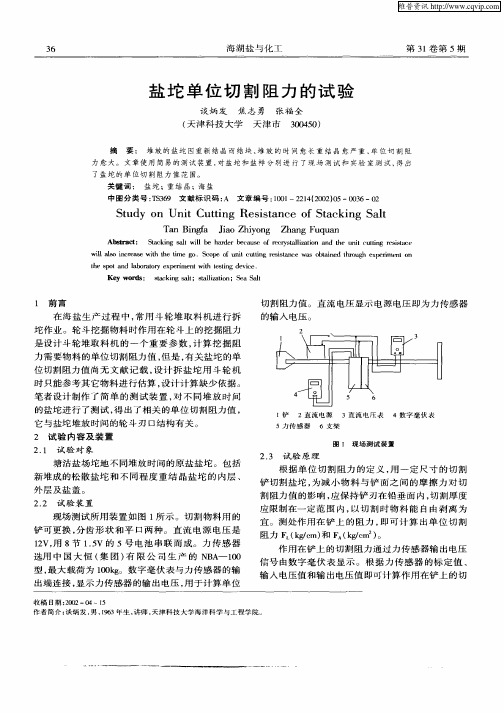
现 场 测 试 所 用 装 置 如 图 1 示 。 切 割 物 料 用 的 所
铲 可 更 换 , 齿 形 状 和 平 口两 种 。直 流 电 源 电 压 是 分
1V, 8节 1 5 的 5号 电 池 串联 而 成 。 力 传 感 器 2 用 .V 选用 中 国 大 恒 ( 团 ) 限 公 司 生 产 的 N A 10 集 有 B ~ 0
Ab t a t sr c : Sa kn a tw l b a d rb c u e o e r s l ain a d t e u i c t n e ite tc ig s l i e h r e e a s fr e y t i t n h n t ut g r ss e l l a z o i a
位 切 割 阻力 值 尚无 文 献 记 载 , 计 拆 盐 坨 用 斗 轮 机 设
时 只能参考其它物料进 行估算 , 计 计算缺少依据 。 设
笔者 设 计 制 作 了简 单 的 测 试 装 置 , 不 同堆 放 时 间 对 的盐 坨 进 行 了测 试 , 出 了相 关 的单 位 切 割 阻 力 值 , 得
S u y o i Cu tn ssa c fS a k n a t t d n Un t ti g Re i t n e o t c i g S l
T n Biga Ja hy n Z a gF q a a n f ioZ io g h uu n n
切割磁场阻力计算公式图
切割磁场阻力计算公式图切割磁场阻力计算公式。
磁场阻力是指当导体在磁场中运动时所受到的阻力,它是由于导体在磁场中运动时感应出的涡流产生的。
磁场阻力的大小与导体的形状、磁场的强度以及导体在磁场中的运动速度等因素有关。
在工程应用中,需要对磁场阻力进行计算,以便设计和优化电磁设备。
切割磁场阻力是一种常见的磁场阻力计算方法,它适用于导体在磁场中作直线运动的情况。
切割磁场阻力计算公式可以用来计算导体在磁场中所受到的磁场阻力,从而为工程设计提供参考依据。
切割磁场阻力计算公式的推导基于法拉第电磁感应定律和洛伦兹力的原理。
根据法拉第电磁感应定律,当导体在磁场中运动时,会感应出涡流,而涡流会产生磁场,从而产生磁场阻力。
根据洛伦兹力的原理,导体在磁场中运动时会受到磁场力的作用,从而产生磁场阻力。
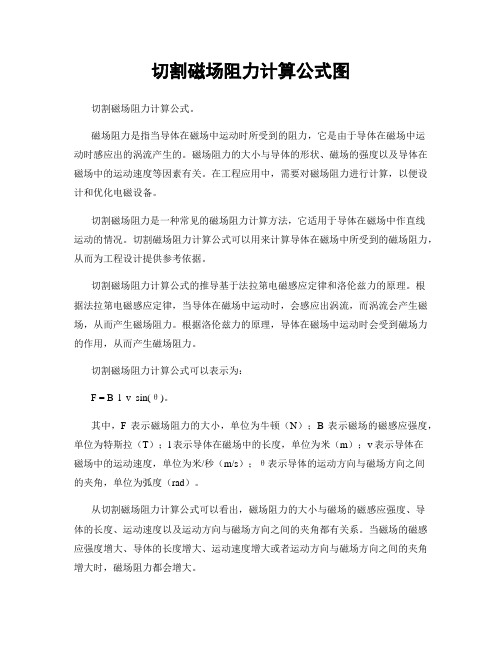
切割磁场阻力计算公式可以表示为:F = B l v sin(θ)。
其中,F表示磁场阻力的大小,单位为牛顿(N);B表示磁场的磁感应强度,单位为特斯拉(T);l表示导体在磁场中的长度,单位为米(m);v表示导体在磁场中的运动速度,单位为米/秒(m/s);θ表示导体的运动方向与磁场方向之间的夹角,单位为弧度(rad)。
从切割磁场阻力计算公式可以看出,磁场阻力的大小与磁场的磁感应强度、导体的长度、运动速度以及运动方向与磁场方向之间的夹角都有关系。
当磁场的磁感应强度增大、导体的长度增大、运动速度增大或者运动方向与磁场方向之间的夹角增大时,磁场阻力都会增大。
在工程设计中,需要对磁场阻力进行计算,以便选择合适的导体材料、磁场强度和运动速度,从而满足工程设计的要求。
通过切割磁场阻力计算公式,可以对磁场阻力进行定量分析,为工程设计提供科学依据。
除了切割磁场阻力计算公式,还有其他一些计算磁场阻力的方法,例如积分法、磁通法等。
不同的计算方法适用于不同的磁场阻力计算场景,工程设计人员可以根据具体情况选择合适的计算方法。
总之,切割磁场阻力计算公式是一种常见的磁场阻力计算方法,它可以用来计算导体在磁场中所受到的磁场阻力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章 收割机械第一节 概述收割机械是谷物收获机械的重要组成部分,谷物收获是农业生产过程中最为复杂的工艺过程,为了更好地了解谷物收获机械化所使用的设备,我们必须首先了解谷物收获的方法。
谷物的收获方法很多,大多是根据不同地区的不同的自然条件,不同的种植方式、经济结构、技术水平等来决定合适的收获方法。
目前全世界关于谷物的收获方法大致有三种方法:一、谷物的收获方法1、分别收获法:用多种相对独立的机械(收割机、运输车、脱粒机、扬场机等)分别对作物完成收割、运输、脱粒、清选等作业的方式。
这种方法在西方发达国家已经完全淘汰,但在发展中国家仍在大量使用。
其特点是设备简单、技术水平低、价格低廉、维护保养简便,但作业周期长、收获积累损失大。
2、联合收获法:利用联合收获机一次完成作物的收割、脱粒、分离和清选等多项作业的方式。
特点:生产率高、作业周期短、积累损失小、作业质量好。
设备投资大、机器利用率低、技术水平要求高。
3、两段收获法:先利用割晒机进行收割,待晾晒3~5天后用带有捡拾器的联合收获机进行捡拾、脱粒、分离和清选作业的方式。
特点:谷粒饱满、产量提高、作业周期长、设备投资大。
另外尚有一种割前脱粒法:利用割前脱粒式联合收获机进行先脱粒后切割或不切割作物茎秆的方式。
特点:脱粒负担大大减少、机器结构简化,但收获损失较大。
目前该机型工作质量有待提高,普及程度很小。
割前脱粒式联合收获机机构简二、谷物的机械收获系统在收获机械部分中,本课程将着重介绍收割机械、脱粒机械、联合收获机械总体参数等内容。
第二节 收割机械的类型和一般结构一、一般类型1、按照茎秆的放铺方向:收割机和割晒机收割机械工作时主要完成谷物的切割和放铺两道工序,按照放铺的方向不同,又可分为收割机和割晒机两种机型。
收割机——收割机工作时,被割刀切断的谷物茎秆形成与前进方向呈900的转向放铺,以便于捡拾和打捆。
主要用于分别收获法。
割晒机——收割机工作时,被割刀切断的谷物茎秆形成与前进方向平行的顺向放铺,以便于两段收获时的晾晒。
2、按照被割谷物茎秆的输送方式:立式收割机和卧式收割机立式收割机——割台为直立式,被割谷物茎秆是在直立状态下进行输送到收割机一侧的。
机构纵向尺寸短。
卧式收割机——割台为水平放置,被割谷物茎秆是在水平输送带上运至收割机一侧的。
输送平稳。
二、基本构成无论是立式收割机还是卧式收割机,其基本构成是相同的,即都是由扶禾装置、切割器、输送装置、传动装置等组成,立式收割机和卧式收割机只是在扶禾装置上有较大的差别。
1、立式收割机:机构组成:分禾器、扶禾星轮、切割器、立式输送带、传动装置等。
驱动工作,分禾器将行内谷物茎秆集束引向切割区,并在扶禾星轮的后向扶持作用下被切割器切割,随即靠向立式输送带被其传送到一侧放铺。
由于割台为立式,纵向尺寸小,重量较轻,置于拖拉机前方,有利于机组的纵向稳定性。
但对倒伏作物和低产谷物适应性不理想。
常用的机型有:4GL —140 / 170,V m =2~4km /h (1~2m/s ),V d =2m/s ,Q=V m B /667 (亩/时),一般为4~9亩/时。
1.铺禾杆2.后挡板3.转向阀4.上输送带5.拨禾轮6.切割器7.分禾器8.下输送带2、卧式收割机:收割机工作时,拨禾抡、输送带和切割器由拖拉机动力输出驱动工作,分禾器将行内谷物茎秆集束引向切割区,并在拨禾轮的后向推送扶持下被切割器切割,随即倒向输送带(也可能是螺旋搅龙)被传出。
1.分禾器2.拨禾轮3.后输送带4.前输送带5.切割器力输出驱动工作,分禾器将行内谷物茎秆集束引向切割区,并在拨禾轮的后向推送扶持下被切割器切割,随即倒向输送带(也可能是螺旋搅龙)被传出。
由于茎秆是在水平状态下被输送的,因此输送平稳,且拨禾抡对倒伏作物具有一定的扶起作用。
但机构纵向尺寸大,不利于拖拉机前置配置,故很少在小型拖拉机上使用。
卧式收割机的输送带有单带和双带之分:单带为割晒机使用,双带为收割机使用,如下图所示:在本章中主要讲授的内容是:切割器和扶禾器。
第三节 切割器及理论分析切割器是收割机上的重要工作部件,他主要完成对谷物茎秆的切割任务,为了有一个良好的工作质量,一般对切割器有如下的技术要求:割茬整齐、不漏割、不堵刀、功率消耗小。
一、谷物茎秆的切割理论实验结果表明,谷物茎秆的切割过程与割刀的特性、茎秆的物理机械性质、切割方式、切割速度、割刀与茎秆的相对位置等有关。
1、切割方式对切割性能的影响所谓切割方式主要是指割刀进入材料的方向,归纳起来主要有正切和滑切两种基本方式:⑴正切——割刀的绝对运动方向垂直与割刀刃口的切割方式。
由此而产生的横切、斜切、削切三种切割方式均应属正切之列。
如图所示:实验结果表明:正切中的三种切割方式因其切入茎秆的方向与茎秆本身的纤维方向存在较大的差异,切割阻力和切割功率消耗也不同。
其中,横切阻力最大,斜切比横切下降30%~40%,削切比横切下降60%。
⑵滑切——割刀的绝对运动方向与割刀刃口既不垂直又不平行的切割方式。
设:V n ——割刀运动的法向速度;V t ——割刀运动的切向速度;α——割刀运动的绝对速度方向与法向速度方向的夹角,此处定义为滑切角。
横切 斜切 削切切割理论的力学试验结果和割刀运动几何分析结果表明,滑切比正切省力。
滑切比正切省力的机理是什么?①高略契金力学试验:高略契金力学试验步骤是,在割刀上一面施加法向力P,一面使割刀刃口沿切向方向产生滑移,滑移量为S,在切割条件相同的情况下(材料、深度),产生如下一组对比数据:割刀切向滑移值S(mm)规定试验切割深度所需法向力P (g)600 1.5500 2.0400 5200 40高略契金力学试验结果表明,割刀在切割同一种材料、同一深度的物料时,切向滑移量越大,所需切割力就越小,即切割越省力。
试验过程表明,当割刀切向滑移量为零时即为正切,只要存在滑移就会产生滑切,因此,滑切比正切省力,P3S=常数,这就是著名的高略契金常数定理。
②割刀运动几何分析:对比分析割刀刃口上某质点进入材料时正切刃口角和滑切刃口角的大小,刃口角越小越省力。
将割刀刃口局部放大,设割刀在A 点切入材料,切割方式分别为正切和滑切,正切刃口角为γ,滑切刃口角为γ/,对比二者大小,进入材料的刃口角越小,切割就越省力。
当进行滑切时,几何分析结果如下:分析结果表明,滑切与正切相比,滑切进入材料时的实际刃口角γ/比正切时的刃口角γ变小了,这也是滑切比正切省力的原因之一。
从力学试验结果和割刀运动几何分析结果两方面说明了滑切比正切省力。
在对物体进行切割时,尽可能地采用滑切方式,以利于降低切割阻力和功率消耗。
滑切正切, , , cos BC DE AC tg tg DE BC AE AC AE γγα′====Q cos , cos 1 , , tg tg tg tg γγααγγγγ′′′∴=≤∴Q <<2、茎秆的物理机械性质对切割性能的影响茎秆的物理机械性质主要是指茎秆本身所固有的一些特性,他包括切割阻力、弯曲阻力、弹性摸量、抗弯强度等。
而这些因素随茎秆的品种、成熟度和湿度等的变化而变化。
只要割刀克服了横切面内的切割阻力,茎秆就会被切断。
但是,在切割象小麦、水稻这样的刚度较小的作物时,只要受到较小的外力就会发生弯斜,给顺利切割造成一定的困难。
因此,要实现对茎秆的完全切割,一般可采取二种措施:具有一定的切割速度或者给被切割茎秆以适当的支承,具体技术路线是:低速有支承切割,高速无支承切割。
⑴有支承切割——在动刀片运动的反向施加一支承力的切割称为有支承切割。
用动刀片配合定刀片的切割称为单支承切割;用动刀片配合带有护刃器的定刀片的切割称为双支承切割。
有支承切割可使茎秆获得一定的抗弯能力,可在低速状态下进行切割,切割速度为:V p = 1~2 m / s。
单支承切割双支承切割无支承切割在同样切割速度的情况下,双支承切割比单支承切割能获得较好的使用参数。
在进行单支承切割时,切割速度为V p = 1~2 m / s,要保证正常的切割,动定刀片之间的切割间隙必须在δ= 0~0.5mm范围内,否则,茎秆的切割阻力增大,有可能发生撕裂现象。
而在进行双支承切割时,切割速度为V p = 1~2 m / s,相对于割刀的上下抗弯能力有较大幅度的增强,动定刀片之间的切割间隙可允许在δ= 1~1.5mm 范围内,这就给切割器的设计、使用、安装提供了比较宽松的条件,所以目前收获机械普遍采用双支承切割方式。
⑵无支承切割——只有动刀片而无定刀片直接切割茎秆的切割称为无支承切割。
由于茎秆是在没有任何扶持的状态下进行切割的,仅靠茎秆自身的抗弯能力P w是很难与动刀片的切割力相平衡的,此时,P>>P w。
切割速度较低时,茎秆将被推倒或折断。
但当动刀片以适当的速度进入材料时,原来静止的茎秆在瞬间获得动刀片所传递的速度并立即产生很大的加速度以及与其方向相反的惯性力P g。
速度越大则惯性力就越大,因而茎秆的抗弯能力也就越大,有利于茎秆的顺利切割。
当P = P g + P w时,可使得茎秆在直立状态下实现切割,因此,无支承切割所需的切割速度要比有支承切割大的多。
例如,切割小麦时,使用带有护刃器的往复式切割器,其切割速度仅为1~2m / s,而无支承的回转式切割器的刀片速度则需10~20m/s,如果切割牧草,则需40~50m/s,这使得机构功率消耗增大、振动增加,传动装置也将比较复杂。
3、切割速度与切割阻力的关系试验结果表明,随着切割速度的增加,切割阻力有所下降。
速度—阻力关系图如下:二、切割器的类型与构造从目前收割机和联合收获机应用情况看,切割器主要有回转式切割器和往复式切割器二种基本类型。
回转式切割器的工作部件为带刃口的回转体,如回转圆盘。
圆盘有光刃和齿刃两种。
圆盘回转为等速运动,切割速度高,回转平稳;但是它的工作幅宽受回转体直径限制,只适用于窄割幅的收割机。
往复式切割器,一般由动刀片、定刀片、护刃器、压刃器、摩擦片、刀杆等组成。
动刀片固定在刀杆上,由曲柄连杆(或摆环)机构驱动,做周期性的往复运动。
护刃器内固定有定刀片。
当刀杆做往复运动时,动刀片与定刀片形成剪切,将谷物茎秆切断,称为有支承切割,不需要很高的切割速度,平均切割速度为1~2m/s 。
往复式切割器工作可靠、适应性强、切割质量较好,可用于割幅宽的机器上,因阻力速度回转式切割器 a.光刃圆盘 b.齿刃圆盘此在割草机、收割机和谷物联合收获机上得到广泛的应用。
往复式切割器存在的问题是割刀做往复运动,惯性力大,不易平衡,工作时振动较大,切割茎秆时茎秆有倾斜和晃动现象,易造成落粒损失。
本节的重点也将针对往复式切割器的类型、结构、工作原理、参数分析等进行介绍。
1、往复式切割器的主要部件(1)动刀片 有光刃和齿刃两种,呈六角形铆接在刀杆上。