单片机图像采集与网络传输
基于STM32的无线图像实时采集传输系统

• 116•利用STM32单片机为控制芯片驱动OV2640模块,实现图像采集,通过wifi 模块把采集的图像通过TCP 协议传输给移动端手持Android 设备。
Qt 开发软件通过socket 接口编程设计出了app 用于图像实时显示OV2640模块采集的图像。
实验结果表明图像传输稳定,可以实现实时的无线图像传输。
OV2640模块可以和其它设备组合,对未来图像类设备有很好的应用潜力。
图像传输应用广泛,在安防设备上可以通过摄像头监控家门、小区等,对犯罪侦查、丢失物品寻找等起到很大作用。
在人工智能领域,需要识别特定事物,比如人脸识别、物体识别等,需要采集很多的图像样本,离不开图像采集技术。
在没有线的束缚下,摄像头和显示终端分离,无线图像传输在日常生活中也有很大的实用性,例如可以在忙着洗衣做饭的时候监控小孩的实时举动,可以查看特定角落的实时画面。
本文探索了图像监控的关键技术图像采集和传输,并通过wifi 模块由TCP 协议实现无线图像传输。
在没有线的束缚下,摄像头和显示终端分离。
在wifi 信号覆盖范围内可以实时探索看不到的或者人类不方便探索的角落。
1 无线图像传输系统无线图像传输系统分为图像采集部分、数据传输部分和终端显示部分。
三者关系如图1所示。
的滤波器,逐行排列,形成方形采集阵列,BG/GR 形式构成的像素大约可以达到200w 个。
在采集光的时候也是逐行扫描采集,直到扫描完成。
其中内部集成了数字图像处理模块,可以直接输出JPEG, GRB422和YCbCr 等数据格式。
Ov2640模块使用的是正点原子的A TK-OV2640摄像头模块。
它共有18个引脚。
其中最重要的是SCCB 总线和HREF 行同步线,VSYNC 场同步线和8位并行数据线。
SCCB 总线和I2C 总线类似用于单片机向Ov2640模块发送控制命令。
在图像采集开始之后,模块会产生采集输出时序。
HREF 输出高电平时,根据时钟进行像素数据的读取,HREF 线变为低电平时读取的数据无效,循环采集直到采完一帧为止。
单片机在电子产品中的作用

单片机在电子产品中的作用随着科技的发展和进步,电子产品在我们日常生活中扮演着越来越重要的角色。
而作为电子产品的核心,单片机(Microcontroller)在其中起着至关重要的作用。
本文将探讨单片机在电子产品中的作用,并分析其在不同领域中的应用。
一、什么是单片机单片机是一种集成电路,主要由微型处理器核心、内存、输入输出接口等模块组成。
它能够独立运行,以处理数据和控制外设设备。
二、单片机的基本功能1.数据处理能力:单片机可以对传感器采集的数据进行处理,并根据预设的算法和逻辑进行计算和判断。
同时,它还能够实现复杂的运算和逻辑控制,满足电子产品对数据处理的需求。
2.控制能力:通过控制输入输出接口,单片机可以控制电子产品的各种功能,包括开关、调节、显示等。
它可以根据外部信号的变化来控制输出,并实现电子产品的自动化控制。
3.存储能力:单片机拥有内存和存储器,可以存储程序和数据,确保数据的可靠性和安全性。
三、单片机在电子产品中的应用1.家电领域:单片机广泛应用于家电产品中,如洗衣机、冰箱、空调等。
它可以监测和控制家电的运行状态,实现智能化的控制和节能管理。
例如,可以根据温度传感器采集的数据来控制空调的运行,自动调节室内温度。
2.通信领域:单片机在通信设备中扮演着重要的角色。
例如,手机中的单片机可以处理通话、信息传输、图像处理等功能;无线路由器中的单片机可以实现网络管理和数据交换;汽车中的单片机可以控制车载娱乐系统、导航系统等。
3.医疗领域:单片机被广泛应用于医疗设备中,如心电图仪、血压计、血糖仪等。
它可以采集和处理患者的生理信号,并根据预设的算法进行分析和诊断。
单片机的应用使得医疗设备更加精确和可靠,为医生和患者提供了更好的服务与保障。
4.工控领域:单片机在工业自动化中起着至关重要的作用。
例如,自动化生产线中的单片机可以控制整个生产过程,实现自动化运行和管理;智能仓库中的单片机可以实现货物管理和自动化操作。
基于ATmega128单片机的图像采集硬件系统

基于ATmega128单片机的图像采集硬件系统丁曼;张代远【摘要】ATmega128系列单片机具有处理速度快,内部功能模块丰富等优点,其数据吞吐率可高达1MIPS/MHz,能够很好地缓解系统在功耗与处理速度上的矛盾.而OV6620作为一种数字摄像头,避免了传统模拟摄像头的消耗MCU资源、功耗大等缺点.文中正是基于这些特点,采用ATmega128单片机,将软件程序通过ISP下载到AVR单片机后,按照原理图连接好电路板及实物,通过OV6620摄像头采集一幅图像,传输到AVR单片机,再对图形进行一定的处理.实验证明所设计的硬件系统能够实现图像的采集、处理以及通信的功能,提高了图像采集与通信的速率,并保持了较好的图像稳定度.%Considering ATmegal28 MCU has advantages of good processing speed and rich internal function, and its data throughput rates can be as high as lMlPS/MHz.it can alleviate the contradiction of system's power consumption and processing speed well. OV6620, as a digital camera, can avoid the shortcomings of traditional analog camera such as MCU resource consumption needing large power. It is based on these characteristics, uses the ATmegal28 MCU, after downloads the software program to the AYR via ISP, connects the physical circuit board following the schematic to capture an image by OV6620 camera and transmit to the AVR microcontroller, and then does a certain treatment to the graphics. Experiments show that die design of the hardware systems can realize the image acquisition , processing and communications. This method improves die rates of image acquisition and communication as much as possible, and has a better image stability.【期刊名称】《计算机技术与发展》【年(卷),期】2012(022)007【总页数】4页(P215-218)【关键词】AVR单片机;图像采集;OV6620;Protel99SE;PCB电路图【作者】丁曼;张代远【作者单位】南京邮电大学计算机学院,江苏南京210003;南京邮电大学计算机学院,江苏南京210003;江苏省无线传感网高技术研究重点实验室,江苏南京210003;南京邮电大学计算机技术研究所,江苏南京210003【正文语种】中文【中图分类】TP390 引言AVR 单片机是RISC 精简指令集的高速8 位单片机,具有I/O 口和A/D 转换功能,高速、低耗、保密性,并且有功能强大的定时器/计数器及通讯接口[1]。
单片机与传感器的数据采集与处理技术

单片机与传感器的数据采集与处理技术在现代智能设备和物联网系统中,单片机与传感器的数据采集与处理技术起着至关重要的作用。
单片机作为一个微型计算机,能够通过各种传感器采集到的数据进行处理和分析,从而实现对环境、设备等方面的实时监测和控制。
本文将详细介绍单片机与传感器的数据采集与处理技术,帮助读者更好地了解这一领域的知识和应用。
一、传感器的作用及分类传感器是将感知到的信息转化为电信号或其他形式的信号的设备,常用于测量各种物理量,如温度、湿度、压力等。
根据其工作原理和测量对象的不同,传感器可分为光学传感器、温度传感器、压力传感器等多种类型。
在数据采集系统中,传感器起着关键作用,能够实时捕获环境中的各种信息,并将其转化为数字信号供单片机进行处理。
二、单片机的基本结构和功能单片机是一种集成了微处理器、存储器和各种输入输出接口的微型计算机,常用于嵌入式系统中。
单片机具有高度集成、体积小、功耗低等特点,能够实现对外部设备和传感器的数据采集和控制。
在数据处理方面,单片机通过其内部的运算单元和存储单元,对采集到的数据进行处理和分析,实现各种功能的实现。
三、数据采集与处理流程数据采集与处理技术通常包括三个基本步骤:传感器信号采集、数据传输和单片机数据处理。
首先,传感器将感知到的信息转化为电信号,并通过模拟数字转换芯片(ADC)转化为数字信号;其次,将采集到的数据通过串口或其他接口传输给单片机;最后,单片机对接收到的数据进行处理和分析,根据预先设定的算法实现各种功能。
四、常用的传感器和单片机在实际应用中,常用的传感器包括温湿度传感器、光学传感器、压力传感器等;常用的单片机包括51系列单片机、STM32系列单片机等。
这些传感器和单片机具有不同的特点和功能,适用于不同的应用场景和要求。
例如,温湿度传感器可用于环境监测,光学传感器可用于图像识别,压力传感器可用于工业控制等。
五、数据采集与处理技术的应用数据采集与处理技术在各个领域均有广泛的应用,如工业自动化、智能家居、智能农业等。
基于单片机的图采像集与处理
03 边缘检测有助于提取图像中的重要信息,如物体 的轮廓和形状。
特征提取
01
从图像中提取有用的特征,如颜色、纹理、形状等。
02
特征提取是机器视觉中的关键步骤,有助于简化图像数据, 提高识别精度。
03
常用的特征提取算法有Haar特征、SIFT、SURF等。
图像识别
01
利用计算机算法对图像进行分类或识别特定目标。
单片机与特征提取算法结合
特征提取
从图像中提取有用的特征信息,如形状、纹理、颜色等。单片机可以通过编程实现特征提取算法,如 Haar特征、LBP(Local Binary Patterns)等。
特征提取算法实现
单片机需要具备足够的计算能力和存储空间,以实现特征提取算法。同时,还需要考虑算法的准确性 和稳定性,以确保提取的特征能够满足后续处理和识别的需求。
06
案例分析
基于单片机的图像采集系统案例
案例一:基于AVR单片机 的图像采集系统
系统还包括了图像预处理 模块,如自动增益控制和 噪声过滤。
ABCD
利用AVR单片机作为主控 制器,通过CMOS图像传 感器采集图像数据。
案例展示了如何将AVR单片机 与CMOS图像传感器集成,实 现简单图像采集功能。
智能化发展
结合人工智能和深度学习技术,实现更高 级的图像识别和分析功能,是未来研究的 一个重要方向。
THANKS
感谢观看
强和特征提取等操作。
人机交互界面
03
开发简单易用的人机交互界面,方便用户对图像采集和处理过
程进行控制和监视。
图像预处理
01
02
03
04
噪声去除
单片机投影仪原理及应用

单片机投影仪原理及应用单片机投影仪是一种利用单片机技术实现投影显示的设备。
其原理主要包括图像采集、图像处理和图像显示三个步骤。
下面将详细介绍单片机投影仪的原理及应用。
首先,单片机投影仪的图像采集主要通过图像传感器实现。
图像传感器将光信号转换为电信号,通过电荷耦合装置完成像素级的信号采集。
在图像采集过程中,图像传感器将光线通过透镜集成电路转换为电信号,并在传感器上形成二维像素阵列,每个像素对应一个光敏元件。
图像传感器的像素阵列通过单片机的高速ADC转换为数字信号,实现图像的模数转换。
其次,单片机投影仪的图像处理包括预处理和后处理两个部分。
预处理主要包括对图像进行滤波、增强和调整的处理。
滤波可以去除图像中的噪声,增强可以改善图像的细节和对比度,调整可以对图像的亮度、饱和度和色调进行调节。
后处理主要包括对图像进行编码压缩和格式转换的处理。
编码压缩可以减少图像数据的存储和传输量,格式转换可以使图像适应不同设备的显示要求。
最后,单片机投影仪的图像显示主要通过光学系统实现。
光学系统包括光源、透镜、反射镜和屏幕等组件。
光源主要提供光线来照亮透镜,透镜通过光学成像原理将图像聚焦到屏幕上。
反射镜可以调整图像的方向和大小,使其适应不同场景的需求。
屏幕是最终显示图像的介质,可以根据需要选择不同的材料和技术,如液晶显示屏、LED显示屏等。
单片机投影仪具有广泛的应用领域。
首先,在教育领域中,单片机投影仪可以用于教学演示和班级互动等。
教师可以通过投影仪将教学内容呈现在大屏幕上,使学生更容易观察和理解。
同时,学生也可以通过投影仪进行小组互动和展示,提高课堂的参与度和学习效果。
其次,在企业领域,单片机投影仪可以用于会议演示和商务洽谈等。
会议演示中,投影仪可以将报告、数据和图表等内容投影到大屏幕上,使参会人员能够清晰地看到和分析。
商务洽谈中,投影仪可以帮助销售人员展示产品和服务,提高客户的接受度和信任度。
再次,在家庭娱乐领域,单片机投影仪可以用于观看电影和玩游戏等。
基于stm32的学生宿舍安防系统的项目设计过程

基于stm32的学生宿舍安防系统的项目设计过程话说在我们的大学里,有一个神秘的传说,那就是学生宿舍的安防系统。
这个系统可是关系到同学们的人身安全和财产安全哦!为了提高同学们的生活质量,我们决定开发一个基于STM32的学生宿舍安防系统。
这个系统不仅能够实时监控宿舍的安全状况,还能够自动报警,让同学们安心学习,不用担心被小偷光顾。
我们就来详细介绍一下这个项目的设计方案吧!二、设计方案1.1 系统架构我们的学生宿舍安防系统采用了分布式架构,包括以下几个部分:视频监控子系统、门禁控制子系统、报警处理子系统和数据存储与分析子系统。
各个子系统之间相互独立,互不影响,共同构成了一个完整的安防系统。
1.2 硬件设备视频监控子系统主要由摄像头、STM32单片机、网络传输模块等组成。
摄像头负责采集宿舍内的实时画面,STM32单片机负责对画面进行处理,如图像压缩、智能分析等。
网络传输模块负责将处理后的画面通过有线或无线方式传输到监控中心。
门禁控制子系统主要由电磁锁、STM32单片机、读卡器等组成。
电磁锁负责控制宿舍门的开关,STM32单片机负责对门锁状态进行检测,读卡器负责读取学生的校园卡信息。
报警处理子系统主要由蜂鸣器、STM32单片机、报警控制器等组成。
当系统检测到异常情况时,如非法入侵、火警等,STM32单片机会触发报警控制器,使蜂鸣器发出警报声,提醒同学们注意安全。
数据存储与分析子系统主要由硬盘、服务器、数据库等组成。
系统会将采集到的画面数据、门锁状态数据等实时存储到硬盘上,并通过服务器进行集中管理。
数据库会对这些数据进行分析,以便为后期的优化和升级提供依据。
二、软件设计2.1 视频监控软件我们的视频监控软件采用了实时操作系统(RTOS),具有高效、稳定的特点。
软件主要包括以下几个功能模块:画面捕获、图像处理、远程监控等。
其中,画面捕获模块负责从摄像头采集画面;图像处理模块负责对画面进行压缩、智能分析等处理;远程监控模块负责将处理后的画面通过网络传输到监控中心。
单片机的像识别技术

单片机的像识别技术随着科技的快速发展,像识别技术越来越成熟,被广泛应用于各个领域。
其中,单片机的像识别技术作为一项重要技术,已经在许多领域中显示出其强大的应用价值。
本文将从单片机的像识别原理、应用范围和未来发展等方面进行论述。
一、单片机的像识别原理单片机的像识别技术是基于图像处理算法和模式识别理论,通过将图像信息输入到单片机中,通过分析图像的特征来实现像识别的功能。
单片机的像识别原理主要包括以下几个方面:1. 图像采集:通过摄像头或者传感器等设备,将现实中的图像采集到单片机中,形成数字图像。
2. 图像预处理:对采集到的图像进行去噪、增强和滤波等预处理操作,以提高图像质量和特征的准确性。
3. 特征提取:通过图像处理算法,对预处理后的图像进行特征提取,如边缘检测、颜色提取等,从而得到具有代表性的特征向量。
4. 模式匹配:将提取到的特征向量与事先存储的已知图像进行比对,以找出最匹配的图像。
5. 输出结果:根据匹配结果,单片机可以输出相关信息,如物体的名称、位置等。
二、单片机的像识别应用范围单片机的像识别技术在各个领域中有着广泛的应用,以下列举几个典型的应用范围:1. 工业领域:单片机的像识别技术可以应用于自动化生产线中,用于检测产品质量、分拣物品等。
比如在电子组装线上,通过识别零件的形状和位置,可以实现自动化的组装过程。
2. 安防领域:单片机的像识别技术可以应用于视频监控系统中,用于人脸识别、车牌识别等。
通过将人脸数据或车牌数据与数据库进行比对,可以实现身份验证、入侵检测等功能。
3. 物联网领域:单片机的像识别技术可以应用于智能家居、智能交通等领域。
比如通过识别人体姿态和手势,可以实现智能家居中的手势控制,实现灯光、电视等设备的操作。
4. 医疗领域:单片机的像识别技术可以应用于医学影像诊断中,用于检测和识别肿瘤、病变等。
通过分析医学图像的特征,可以准确地判断病情,提高诊断效率。
三、单片机的像识别技术的发展趋势随着人工智能和深度学习技术的不断发展,单片机的像识别技术也在不断演进,具有以下几个发展趋势:1. 算法优化:随着计算能力的提升,单片机的像识别算法会变得更加高效和准确。
基于单片机的图像处理采集系统
(二 〇 一 二 年 六 月本科毕业设计说明书 学校代码: 10128 学 号:题 目:基于单片机的图像处理采集系统设计与实现 学生姓名: 学 院: 系 别: 专 业: 班 级: 指导教师:摘要传统的工业级图像处理采集系统大多是由CCD摄像头、图像采集卡和PC机组成,虽已得到了广泛的应用,但是它具有结构复杂,成本高,体积大,功耗大等缺点。
随着单片机的迅速发展,开发一种智能控制及智能处理功能的微型图像处理采集系统成为可能,并且也克服了传统图像处理采集系统的诸多缺点。
本设计提出了基于单片机的图像采集系统,该系统主要由四大模块组成:第一个是单片机控制模块,对摄像头进行控制;第二个是摄像头模块,即进行图像拍摄和取图;第三个是Zigbee无线传输模块,功能是将图像传送到上位机;最后是上位机,实现图像显示功能。
其优点是硬件电路简单,软件功能完善,控制系统可靠,性价比较高,使用环境广泛及成本低等。
利用Proteus和Keil进行仿真调试,可以看到设计内容的运行结果,验证系统运的行正确及稳定性,并且实现了图像处理采集功能,所以具有一定的实用和参考价值。
关键词:单片机;Proteus;图像采集AbstractThe traditional industrial image processing collection system by CCD camera, mostly image collection card and PC unit into, although already a wide range of applications, but it has the structure is complex, high cost, big volume and shortcomings, such as big power consumption. With the rapid development of the single chip microcomputer, the development of a kind of intelligent control and intelligent processing function of micro image processing collection system possible, and also overcome traditional image processing collection system of many of the faults.This design is put forward based on SCM image acquisition system, the system consists of four modules: the first one is the single chip microcomputer control module, the camera to control; The second is a camera module, the image shoot and take diagram; The third is Zigbee wireless transmission module, the function is will images to PC; Finally the PC, realize image display function. Its advantage is hardware circuit is simple, software perfect function, control system and reliable, high cost performance, use extensive and environment cost low status. Use Proteus and Keil simulation commissioning, can see the operation of the design content, as demonstrated the correct and do the system stability, and realize the image processing collection function, so has certain practical and reference value.Keywords:Single-Chip Microcomputer;Proteus; Image Capture目录第一章绪论 (1)1.1 课题研究现状 (1)1.2 课题研究目的意义 (1)1.3 本课题研究的主要内容 (1)第二章硬件设计 (2)2.1 系统设计方案 (2)2.2 硬件简介 (2)2.2.1 80C51简介 (2)2.2.2 I/O端口 (4)2.2.3 控制引脚 (5)2.3 摄像头 (6)2.3.1 波特率 (6)2.3.2 数据包 (6)2.3.3 摄像头控制指令 (6)2.4 Zigbee无线传输模块 (9)2.4.1 Zigbee简介 (9)2.4.2 Zigbee技术应用领域 (10)2.4.3 Zigbee 技术特点 (10)第三章软件设计及调试 (12)3.1 Keil调试 (12)3.1.1 Keil简介 (12)3.1.2 Keil调试过程 (12)3.2 程序设计 (19)3.3 电路图设计 (20)3.3.1 Proteus简介 (20)3.3.2 电路图设计过程 (23)3.4 Keil与Proteus联机调试 (27)结论 (30)参考文献 (31)附录 (32)程序清单 (32)谢辞 (34)第一章绪论1.1 课题研究现状随着现代电子信息技术的迅速发展,使得信息处理技术越来越重要,而图像处理采集技术在信息处理技术当中有着异常重要的位置。
基于ATmega128单片机的图像采集硬件系统

n c st h i a ic i b a d f l e t he p ys lcr u t o r o l n e s h mai o c p u e a ma e b c owi g t c e t t a tr n i g y OV6 2 a e a a d ta s tt e AVR co o t l r h c 60c m r n n mi o t r h mi r c n r l , oe
3 Ist eo o u rT cn lg , aj gUnvrt f ot adT l o .ntu f mp t ehoo y N ni iesyo s e cmmu i t n , a. g2 0 0 , hn ) it C e n i P sn e n a o sN ni 10 3 C i ci j n a
OV6 2 6 0,a i i l a r sa d g t me a。c l a o d t e s o c mi g fta i 0 a ao a e a s c sM CU e o r e c n u to e d n a g a c a v i h  ̄ o n so d t n l l g c l h r i n a m r u ha r s u c o s mp i n n e i g lr e p we . ti a e n t e e c a a trsis,u e h m e a 2 CU ,a trd wn o d e s fwa e p o r m o t e AVR i S o r I sb s d o h s h c e t r i c s s t e AT g 18M fe o l a st o t r r g a t h h v a I P,c n o —
Ab t a t Co sd rn s r c : n i e g ATme a 2 CU a d a t g s o o d p o e sn p e n i h i tr a u c o i g 18M h s a v n a e f g o r c s i g s e d a d r n e n l f n t n。a d is d t h u h u c i n t aatr g p t o
高速图像采集和传输系统设计

亮 度 信号 . 在 F G 并 P A中进 行 图像 的预 处 理 . 以在 可
F G 中进 行 二 值 化 、o e 边 缘 分 割 、 PA Sb l 中值 滤 波 , 处 将 理 后 的亮 度 信 号 送 入 A M 模 块 由 于 IL 9 8 R S 5 8 5产 生
理
据采集模 块 。设计结 合机器 视觉 的这两 大发展趋 势 ,
随 着 工 业 和 计 算 机 技 术 的 发 展 . 采 用 单 片 机 或 只
12 P . F GA 模 块 Atr l a公 司 的 E 1 1 0系 列 是 性 价 比较 高 的 可 e PK0
者 D P进 行 控 制 的 传 统 图 像 采 集 系 统 . 已 经 不 能 满 S
二
收 稿 日期 :0 9 O 2 修 稿 日期 :0 9 1 —1 2 0 —1 一 8 20 — 1 5 作 者简介 : 陈增 辉 (9 3 , , 东梅 州 人 , 士 研 究 生 , 究 方 向 为 智 能 工 程 和 嵌 入 式 系 统 1 8 一) 男 广 硕 研
期
v
@ M R OPT8 1 OE ̄C  ̄ 2 2 D MU
统的应 用领 , 有 实际的使 用价值 。 具
关键词 : 器视 觉 ; P 机 F GA; ARM ;数 据 采 集
0 引
言
Q C F模 式和 S C Q I C B接 V ,并 具有 自动 曝光 控制 、 I 自
动增 益控制 、 自动 白平 衡 、 自动 带 通 滤 波 、 自动 黑 级 校 准 等功 能 。O 95 V 6 0的 最 大 帧 速 率 在 V A 格 式 时 为 G
开 发 案 例
——. ..... ..... ... .. ..... ..... ..... ...— .... ..... ..... ...
stm32 uvc编程

stm32 uvc编程【STM32 UVC编程】一视觉摄像头开发的实践指南引言:随着物联网和智能家居的快速发展,嵌入式视觉应用变得越来越重要。
而具备UVC(USB Video Class)功能的STM32单片机,成为了开发者普遍选择的工具。
本文将以STM32 UVC编程为主题,从基础知识到实践案例,一步一步地解析其实现原理、操作步骤和常见问题。
第一步:UVC基础知识概述UVC(USB Video Class)是一种通用的标准,用于定义视频和音频流的传输方式。
基于UVC的相机,通过USB接口与计算机进行数据传输。
了解UVC的基础知识对于理解STM32 UVC编程是至关重要的。
以下是几个重要概念的简要说明:1. 设备描述符(Device Descriptor):描述相机的基本信息,如供应商ID、产品ID、设备版本等。
2. 配置描述符(Configuration Descriptor):定义该相机支持的配置及其参数。
3. 接口描述符(Interface Descriptor):描述一个相机的接口,可能包含视频流、音频流、控制命令等等。
4. 控制命令(Control Command):通过USB控制传输管道发送到设备的命令。
5. 帧描述符(Frame Descriptor):描述一帧视频的参数,如图像大小、格式、帧率等。
第二步:准备开发环境在进行STM32 UVC编程之前,需要准备好以下工具和资源:1. STM32开发板:选择一款具备USB接口的STM32单片机开发板,例如STM32F4 Discovery、NUCLEO-F446RE等。
2. STM32CubeMX:一款由STMicroelectronics提供的集成开发环境(IDE)插件,用于生成STM32项目的代码框架。
3. STM32Cube USB Device库:一个用于USB设备通信的库,提供了创建UVC相机所需的基础功能。
4. USB摄像头:任何符合UVC标准的USB摄像头均可,既可以使用已有的USB摄像头,也可以购买专门的UVC相机模块。
基于单片机的图像采集系统设计

目录0 前言 (1)1总体方案设计 (1)2 系统硬件设计 (3)3 软件设计 (9)3.1软件设计概述 (9)3.2程序流程图 (9)3.3子程序模块设计 (10)4系统调试及结果分析 (11)5结论及进一步设想 (14)参考文献 (14)课程设计体会 (15)附录1 元件清单 (16)附录2 系统电路图 (17)附录3 源程序 (18)基于单片机的图像采集系统刘杰薇沈阳航空航天大学自动化学院摘要:传统的工业级图像处理采集系统大多是由CCD摄像头、图像采集卡和PC机组成,虽已得到了广泛的应用,但是它具有结构复杂,成本高,体积大,功耗大等缺点。
随着单片机的迅速发展,开发一种智能控制及智能处理功能的微型图像处理采集系统成为可能,并且也克服了传统图像处理采集系统的诸多缺点。
本设计的图像采集系统采用AT89C51单片机为中心器件,利用74LS373寄存器、62256存储器。
将软、硬件有机地结合起来,使得系统能够实现对摄像头传输的图像信号的采集,并保存在外置存储芯片中。
其中软件系统采用C语言编写程序,包括延时程序、地址顺延程序等,硬件系统利用PROTEUS强大的功能来实现,简单切易于观察,在仿真中就可以观察到实际的工作状态。
关键字:单片机;图像采集;数字摄像头0前言近年来随着科技的飞速发展,单片机的应用正在不断的走向深入,同时带动着传统控制检测日新月异更新。
在实时检测和自动控制的单片机应用系统中,单片机往往是作为一个核心部件来使用,仅单片机方面的知识是不够的,还要根据具体的硬件结构,以及针对具体的应用对象的软件结合,加以完善。
数字图像采集由于其大数据量通常采用DSP等高速处理器来实现。
在某些领域方面图像实时性的要求并没有那么高,因此,本文采用STC89C51单片机作为控制器进行图像采集。
1总体方案设计方案一:由于C51单片机的RAM存储容量有限,而且受到C51单片机的IO工作频率的限制,直接通过C51单片机采集完整一帧的数字信号很难实现。
基于单片机的低成本CMOS图像采集系统

关键词 : 图像 采 集 ; 单 片机 ; 图像 拼 接 ; 低成 本 ; 物联 网 中图 分 类 号 : T P 3 6 8 . 2 文献标识码 : A 文章编号 : 1 0 0 2—1 8 4 1 ( 2 0 1 4 ) 0 2— 0 0 4 5— 0 5
Ab s t r a c t : I n o r d e r t o r e a l i z e t h e i ma g e a c q u i s i t i o n i n t h e s y s t e m o f i n t e r n e t o f t h i n g s , a n e w l o w— c o s t i ma g e a c q u i s i t i o n s y s t e m b a s e d o n S CM w a s p r o p o s e d a c c o r d i n g t o t h e f e a t u r e o f i n t e r n e t o f t h i n g s . T h e b a s i c p i r n c i p l e s o f t h e s y s t e m wa s d i s c u s s e d a n d t h e s o l u t i o n s o f t h e h a r d w a r e a n d s o f t w a r e w a s d e s i g n e d . T h e h a r d w a r e p a r t i s c o mp o s e d o f e mb e d d e d c o n t r o l l e r S CM , C MOS i ma g e s e n s o r , l f a s h me mo r y, t h e p r i c e o f t h e s e l e c t e d d e v i c e i s c h e a p, a n d t h e h a r d wa r e c o n n e c t i o n i s s i mp l e , wh i c h c o n t i r b u t e s t o t h e l o w c o s t o f s y s t e m. I n t h e s o f t w a r e s e c t i o n , t h i s p a p e r i n t r o d u c e s t h e s y s t e mg ma i n s o f t w a r e d e s i g n , a n d p r e s e n t s a n e w i ma g e mo s a i c i n g a l g o i r t h m, s u c c e s s f u l l y s o l v e d t h e p r o b l e m t h a t t h e p r o c e s s i n g s p e e d o f S C M i s t o o s l o w t o c a p t u r e i ma g e . T h e r e s u l t s s h o w t h a t t h i s e mb e d d e d i ma g e a c q u i s i t i o n s y s t e m h a s a s i mp l e s t r u c t u r e , s ma l l v o l u me , c a n i r g h t l y c a p t u r e t h e i ma g e wi t h t h e c h a r a c t e r i s t i c s o f g o o d r e a l t i me a b i l i t y , r u n n i n g s t a b i l i z a t i o n, c a n b e v e r y g o o d t o me e t t h e d e ma n d o f u s e r , a n d h a s a v e y r w i d e l y a p p l i c a t i o n i f e l d . Ke y wo r d s :i ma g e a c q u i s i t i o n; S CM ; i ma g e mo s a i c i n g; l o w— c o s t ; i n t e r n e t o f t h i n g s
图传方案叫wifi

图传方案叫wifi引言随着技术的进步和无线通信的发展,图传技术(即图像传输技术)得到了广泛应用。
图传方案“wifi”是其中一种常见的无线图传方案,它通过WiFi无线网络实现图像传输。
本文将介绍图传方案“wifi”的原理、特点、应用场景以及常见的实现方式。
原理图传方案“wifi”通过利用无线局域网(WiFi)网络,将图像数据从资源端传输到目的端。
其原理如下:1.配置网络连接:资源端和目的端通过连接到同一个WiFi网络实现网络连接。
资源端一般是采集图像数据的设备,例如摄像头或传感器;而目的端一般是接收和显示图像数据的设备,例如电脑、手机或平板电脑。
2.图像数据传输:资源端将采集到的图像数据通过WiFi网络传输到目的端。
传输可以使用无线局域网的标准协议,例如TCP/IP协议。
资源端将图像数据分割成一定大小的数据包,并通过WiFi网络逐个发送到目的端。
目的端接收到数据包后进行重组,恢复原始的图像数据。
3.图像显示:目的端接收和恢复完整的图像数据后,可以通过显示设备将图像展示给用户。
根据应用的需求,可以使用各种设备进行图像显示,例如显示器、手机屏幕或平板电脑屏幕。
特点图传方案“wifi”具有以下特点:1.无线传输:采用WiFi网络传输图像数据,无需通过有线连接,方便灵活。
2.实时性:图传方案“wifi”通过无线传输,可以实现实时图像传输。
这对于监控系统、机器人等需要实时反馈的应用非常重要。
3.高带宽:WiFi网络通常具有较高的带宽,可以支持大量图像数据的传输。
这使得图传方案“wifi”适用于高分辨率图像或视频的传输。
4.便携性:由于无线传输,图传方案“wifi”可以实现设备的便携性。
用户可以通过手机、平板电脑等移动设备接收和查看图像数据。
应用场景图传方案“wifi”广泛应用于各个领域,以下是几个常见的应用场景:1. 无人机在无人机领域,图传方案“wifi”被广泛应用于飞行控制系统。
通过将摄像头安装在无人机上,可以实时传输无人机的视角图像到地面站,使得无人机的操控和监测更加方便。
单片机摄像头模块原理
单片机摄像头模块原理
单片机摄像头模块是一种用于图像采集与处理的设备,常用于物体识别、图像识别、视频数据传输等应用场景。
该模块由 CMOS 或 CCD 摄像传感器、图像处理芯片以及与单片机相连接的接口组成。
其中,摄像传感器负责将光信号转换为电信号,经过模拟信号处理后输出为数字信号;图像处理芯片则负责对摄像传感器输出的图像进行增强、滤波、编码和压缩等处理,保证图像质量和传输效率;单片机与摄像头模块之间的接口则用于传输图像数据和控制指令。
在工作过程中,单片机通过向摄像头模块发送特定的命令,控制模块进行图像采集、处理和传输操作。
摄像头模块将采集的图像数据以数字信号形式传输给单片机,并根据单片机的指令进行相应的处理。
处理后的图像数据可以直接在单片机上显示,或者通过串口或其他方式传输给其他设备。
摄像头模块的工作原理基本可以分为以下几个步骤:
1. 传感器感光与模拟信号输出:光线进入传感器,感光元件将光信号转换为电信号。
经过模拟信号处理电路,将模拟信号转换为数字信号输出。
2. 图像处理:摄像模块将数字信号传输给图像处理芯片进行处理,包括增强、滤波、编码和压缩等步骤。
3. 单片机控制与数据接收:单片机通过与摄像头模块之间的接
口进行通信,发送控制指令以及接收图像数据。
4. 图像数据处理与应用:单片机接收到图像数据后,可以根据需要进行图像处理,例如目标识别、图像识别等。
处理后的图像数据可以在单片机上显示,或者通过其他方式传输给其他设备。
通过以上步骤,单片机摄像头模块能够实现对图像的采集、处理和应用,为物体识别、图像识别等应用提供支持。
单片机机器视觉应用 实现图像的采集和处理

单片机机器视觉应用实现图像的采集和处理单片机机器视觉应用:实现图像的采集和处理在当今科技日新月异的时代,单片机机器视觉应用已经逐渐成为了各个领域中不可或缺的一部分。
通过单片机与摄像头的结合,我们可以实现图像的采集和处理,从而为我们提供更多的数据信息和实时反馈,为各行各业的发展带来更多的可能性和便利性。
一、单片机机器视觉的应用背景和意义随着科技的不断进步,单片机机器视觉应用已经在许多领域发挥重要作用。
首先,图像采集与处理的方式可以使得我们能够更好地了解自然界的规律和变化,为后续的研究提供了技术支持。
其次,图像采集与处理可以帮助我们进行数据分析和判断,提升生产效率和质量。
再次,借助于机器视觉,我们可以实现更多领域的自动化,解放人力并提高效率。
二、单片机机器视觉应用的基本原理1. 图像采集单片机机器视觉的第一步就是图像的采集。
一般来说,我们需要通过摄像头将物体的图像信息转化成数字信号,然后传输给单片机进行处理。
常用的摄像头有CCD和CMOS两种类型,接口通常为SPI或者I2C。
2. 图像处理在图像采集完成后,我们就需要对图像进行处理。
单片机机器视觉的主要处理步骤包括图像滤波、图像增强、特征提取等。
通过这些处理,我们可以去除图像中的噪声,提取出我们需要的信息,并进行后续的分析与判断。
三、单片机机器视觉应用的具体案例和实现方法1. 工业自动化领域在工业自动化领域中,单片机机器视觉应用已经得到了广泛的应用。
比如,我们可以通过机器视觉对产品进行质量检测,检测出产品上的瑕疵和缺陷,以提升产品质量。
此外,还可以利用机器视觉对产品进行排序和分类,实现自动化生产线的高效运作。
2. 智能交通领域单片机机器视觉在智能交通领域的应用也非常重要。
例如,通过安装摄像头和单片机,我们可以实现车辆的自动识别和计数,便于交通管理和路况监控。
同时,还可以利用机器视觉技术实现交通信号灯的智能控制,提高交通效率和安全性。
3. 医疗健康领域在医疗健康领域,单片机机器视觉应用也发挥了重要作用。
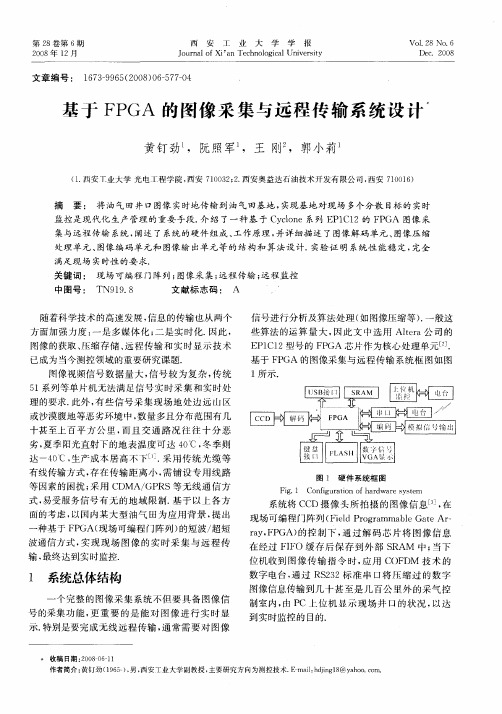
基于FPGA的图像采集与远程传输系统设计
一
图 1 硬 件 系 统 框 图
Fi . Co f u a i n o a d r y t m g1 n i r t fh r wa e s s e g o
系统 将 C D摄 像 头 所 拍 摄 的 图像 信 息 I , C 3 在 ]
第 2 卷 第 6期 8 20 0 8年 1 月 2
西
安
工
业
大
学
学
报
Vo _ 8 NO 6 I2 .
De . 2 8 c 00
J u n l fXia c n lg clUnv riy o r a o ’ nTe h oo ia ie st
文章编 号 : 1 7 —9 5 2 0 ) 65 70 6 39 6 ( 0 8 0 —7 —4
1 所示 .
图像 视频信 号 数据 量 大 , 号 较 为 复 杂 , 统 信 传
5 系列 等单 片机无 法满 足信 号实 时 采 集 和实 时处 1
理 的要求. 外 , 此 有些 信 号 采 集现 场 地 处 边 远 山 区 或沙 漠腹地 等恶 劣环境 中, 量 多且 分 布范 围有几 数
摘 要 : 将 油 气田 井 口图像 实时地 传 输到 油 气田基地 , 实现 基地 对现 场 多个分散 目标 的 实时
监 控是现 代化 生产 管理 的重要 手段 . 绍 了一种 基 于 C co e系列 E 1 1 介 y ln P C 2的 F GA 图像 采 P
集与远程 传输 系统 , 阐述 了系统 的硬 件 组成 、 工作 原理 , 并详 细描 述 了图像 解码 单元 、 图像 压 缩 处理单元 、 图像 编码 单元 和 图像 输 出单元 等 的结 构和 算 法设 计. 实验 证 明 系统性 能 稳 定 , 完全
基于STC89C52单片机的车载安全识别系统的设计

基于STC89C52单片机的车载安全识别系统的设计1. 引言车辆安全问题一直是人们关注的焦点之一。
随着车辆数量的增加和交通状况的复杂化,车辆安全识别系统的研究和应用变得尤为重要。
本文基于STC89C52单片机,设计了一种车载安全识别系统,旨在提高车辆驾驶过程中的安全性。
2. 系统设计2.1 系统框架本文设计的车载安全识别系统主要包括图像采集模块、图像处理模块、决策模块和报警模块。
图像采集模块负责采集车辆周围环境图像,图像处理模块对采集到的图像进行处理和分析,决策模块根据分析结果进行判断,报警模块在需要时发出警报。
2.2 硬件设计本系统主要使用STC89C52单片机作为控制核心,并通过相应传感器实现对环境信息的感知。
其中,摄像头用于获取周围环境图像,加速度传感器用于检测车辆加速度变化情况。
2.3 软件设计软件部分主要包括嵌入式软件开发和算法设计两个方面。
嵌入式软件开发主要负责实现系统的各个模块之间的通信和控制;算法设计主要负责图像处理和决策模块的算法实现。
3. 图像采集模块设计3.1 摄像头选择为了获取清晰、稳定的图像,本系统选择了分辨率较高、噪声较低的摄像头。
同时,考虑到车辆行驶过程中可能出现光线变化等情况,我们还采用了自动曝光和自动白平衡功能。
3.2 图像采集与传输为了保证图像数据传输的稳定性和实时性,本系统使用了高速串行接口进行数据传输。
同时,为了减小数据传输量,我们对图像进行压缩处理,并通过差分编码等技术减小数据量。
4. 图像处理模块设计4.1 图像预处理由于车载环境中可能存在各种噪声和干扰,对于采集到的图像需要进行预处理。
本系统使用了滤波、增强等技术对图像进行去噪和增强。
4.2 物体检测与识别本系统通过对预处理后的图像进行特征提取和目标检测,实现对车辆周围物体的检测和识别。
我们采用了基于深度学习的目标检测算法,通过对训练集的学习和训练,实现对不同物体的识别。
5. 决策模块设计5.1 风险评估决策模块通过对车辆周围环境进行分析和评估,判断当前驾驶状态下可能存在的安全风险。
基于STM32F407的图像采集与传输系统的设计与实现

基于STM32F407的图像采集与传输系统的设计与实现杨宇;贾永兴;荣传振;王渊;朱莹【摘要】系统以基于Cortex-M4内核的STM32F407作为控制核心,使用OV9655图像传感器采集图像,并利用TFT屏动态显示.图像传输模块基于LwIP协议实现向PC传输图像,最后PC接收并保存图像数据,利用MATLAB编程恢复图像,将其与TFF显示的图像对比.实验结果表明,图像传输稳定可靠,图像清晰,满足机器人通过图像识别目标的要求.【期刊名称】《微型机与应用》【年(卷),期】2015(034)008【总页数】3页(P26-28)【关键词】Cortex-M4 STM32F407;图像传输;LwIP【作者】杨宇;贾永兴;荣传振;王渊;朱莹【作者单位】解放军理工大学通信工程学院,江苏南京210007;解放军理工大学通信工程学院,江苏南京210007;解放军理工大学通信工程学院,江苏南京210007;解放军理工大学通信工程学院,江苏南京210007;解放军理工大学通信工程学院,江苏南京210007【正文语种】中文【中图分类】TP393.11图像是人类获取信息的主要来源,也是智能机器人感知环境和识别目标的重要信息源之一[1]。
因此,如何通过相机传感器高速、有效地获取和传输图像信息,成为智能机器人利用图像正确感知环境和识别目标的前提。
本文介绍了一种基于STM32F407芯片,利用Lw IP协议的图像采集与传输系统。
本系统的总体设计思路为:以 STM32F407为主控核心,通过DCMI接口接收图像传感器OV9655采集的图像,利用DMA方式将图像发送到外部SRAM,同时通过FSMC接口将此数据发送到TFT屏显示,然后将外部SRAM上的图像通过网络传输并保存到PC,最后,利用MATLAB软件将接收的图像数据进行恢复显示,并验证其正确性。
系统总体结构如图1所示。
本系统的硬件电路主要包括:微处理器、摄像头、以太网模块、SRAM、TFT、RJ45接口、JTAG接口、复位电路、电源等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单片机图像采集与网络传输作者:发布时间:2012-03-21来源:繁体版1.引言随着网络技术的发展和网络应用的普及,如何充分利用网络资源来实现低成本、高可靠的远程视频监控,已成为一个技术热点。
本文介绍一个用单片机与图像采集模块接口,嵌入TCP/IP协议栈,制作“网络摄像头”的方1.引言随着网络技术的发展和网络应用的普及,如何充分利用网络资源来实现低成本、高可靠的远程视频监控,已成为一个技术热点。
本文介绍一个用单片机与图像采集模块接口,嵌入TCP/IP协议栈,制作“网络摄像头”的方法。
本网络摄像头在一个组播式视频图像监控系统中,只作为组播源向以太网发送视频图像数据;其它监控计算机则作为组播成员接收数据。
整个视频图像发送和监控系统在局域网中使用时,监控接收端的PC机只要加入了组播组,不必知道网络摄像头的IP地址和MAC地址,也不需要两者的IP地址是在同一网段,均可接收到网络摄像头发出的图像数据,使用起来相当方便。
2. 硬件接口电路网络摄像头的硬件接口电路如图1所示。
该电路采用的单片机是89C52芯片,另扩展32K的外部存储器,供网络和图像数据处理用。
图1中的DB200是一个产品摄像模块,它由微型摄像镜头、图像缓存、时序发生、总线接口等电路构成;其外接信号是一个16脚的插座(9 ~ 16脚分别对应数据线D7 ~ D0,其它为地址、电源和读写控制线)。
图1中,U1、U4和DB200的片选信号由89C52的地址线A14、A15和74HC00的3个与非门提供:A15=0时选通U4;A15=1及A14=0时选通U1;A15=1及A14=1时选通DB200。
DB200的第8脚接A13用来选择其内部寄存器。
RTL8019AS有3种工作方式:(1)跳线方式。
(2)即插即用方式。
(3)免跳线方式。
RTL8019AS使用哪种工作方式由第65脚(JP)决定。
为减少连线,我们采用跳线方式(把65脚接高电平)。
这样网卡的传输介质、I/O基地址和中断号就由74、77、78、79、80、81、82、84、85等引脚状态决定。
RTL8019AS的81、82、84、85(BD0-BD3)脚接低电平,对应32个I/O寄存器地址范围为300H - 31FH;78-80(BD4-BD6)脚接低电平,对应中断号为INT0(IRQ2/9);74(BA14)、77(BD7)脚接低电平,为自动检测传输介质方式。
RTL8019AS有20根地址(SA0-SA19)线,将其5、7、8、9、10(SA0-SA4)脚接89C52的A8-A12,将15、16(SA8、SA9)脚接高电平来确保基地址为300H,其余地址线则全部接地。
由于RTL8019AS的使能(AEN)信号是由89C52的A15=1及A14=0时提供,因此我们可得出以下地址关系:89C52:A15 A14 A13 A12 A11 A10 A9 A8 A7………A08019:SA4 SA3 SA2 SA1 SA0 …………2进制数: 1 0 0 0 0 0 0 0 0000 0000 16进制数:0X80002进制数: 1 0 0 1 1 1 1 1 0000 0000 16进制数:0X9F00可见,如果89C52输出地址0X8000至0X9F00,均可选中RTL8019AS。
由于RTL8019AS的SA9和SA8恒接高电平,当89C52 的地址信号由0X8000至0X9F00变动时,会有:SA9 SA8 SA7 SA6 SA5 SA4 SA3 SA2 SA1 SA0 =11 0000 0000 至11 0001 1111,即对应选择RTL8019AS的I/O寄存器地址300H至31FH。
RTL8019AS的96脚(IOCS16B)接低电平,使其工作在8位总线模式;64脚接低电平,使用非AUI接口;31、32脚接高电平,屏蔽远程自举加载功能;33脚所需复位信号,由89C52的P1.5提供;29、30脚对应接89C52的读写脚。
3. 软件模块设计嵌入式系统一般采用简化的TCP/IP协议栈。
常用的有IP、ARP、UDP、ICMP、TCP以及HTTP等协议。
为了尝试实现一个最简易的嵌入式TCP/IP协议,我们选用UDP通讯方式。
UDP的通讯方式有3种:点对点、广播和组播。
考虑到点对点通讯需要ARP协议来取得目标节点的物理地址,我们不用点对点通讯。
至于广播通讯和组播通讯,两者都不需要ARP协议。
但广播方式有如下缺陷:(1)广播数据报不能跨过路由器传播;(2)广播时本地子网的所有主机都会接收到广播并作出响应,既增加了非接收者的开销,保密性也不好。
我们采用的组播方式不存在这些问题,较适合作为网络视频监控的信息传输。
3.1 主程序工作流程网络摄像头的图像采集、打包、发送的软件流程如图2所示,对应的主程序源码见例程1。
为了便于接收端正确判断每帧图像的开始,主程序在发送1帧图像数据前,先用Send_lwm( ) 函数发送特征字为“lwm”的4字节长的数据包(该函数从略),然后再发送图像数据。
void main(void) //(例程1--循环采集和发送图像数据的主程序):{ init_8019( ); // RTLS8019AS初始化。
while(1) // 循环采集和发送图像:{ img_capture( ); // 采集1帧图像。
Send_lwm( ); // 发送图像开始的特征字“lwm”Send_img( ); // 发送1帧图像数据。
}}3.2 以太网控制芯片的初始化RTL8019AS 芯片有32个寄存器地址,映射到4个页面,每页有16个寄存器。
本系统只用0页的14个(00-01H,04-0BH,0D-0EH,0F-10H)寄存器。
程序先定义reg00-reg10, 然后用初始化函数init_8019( )对RTL8019AS各寄存器进行配置:#define XBYTE ((unsigned char volatile xdata *) 0)#define reg00 XBYTE[0x8000] //对应300H A15=1, A14=0,A13=A12=A11=A10=A9=A8=0………………..#define reg10 XBYTE[0x9000] //对应310H A15=1, A14=0,A13=0,A12=1,A11=A10=A9=A8=0sbit RST8019 = P1 ^ 5; // RST8019AS的硬件复位端。
void init_8019(void) // (例程2--RTL8019AS的初始化):{ UINT C1; for(C1=0;C1<1000;C1++); // 软件延时,确保芯片进入稳定状态RST8019=1; for(C1=0;C1<1000;C1++); // 硬件复位、延时以确保芯片完全复位RST8019=0; for(C1=0;C1<1000;C1++); // 硬件复位、延时以确保芯片完全复位reg00=0x21; // 选择第0页寄存器,并使芯片停止收发和DMA操作reg0e=0xC8; // DCR:采用普通、8位DMA方式reg07=0xFF; reg0f=0x00; // 清除和屏蔽所有中断(本系统未采用中断)reg0d=0xE0; // TCR:采用普通发送模式、允许CRC产生和校验}为了节省资源,上述对RTLS8019AS的初始化中,凡是与发送无关的寄存器都没有设置。
发送时所要用的组播地址、物理地址和IP地址,则在打包时再封装到各协议层数据包的头部。
3.3 图像数据的采集负责图像采集的DB200摄像模块内部有数据、状态、采集控制和地址控制4个寄存器,表1是它们的寻址方式。
对各寄存器的操作规则如下:(1)写操作-对采集控制寄存器(CAP_CTRLr)D0位写1,可启动采集过程;对地址控制寄存器(CAP_INCr)D0位写一次1,其图像缓存的地址就加1。
(2)读操作-如果状态寄存器(CAP_STAUSr)的D0=1,表示可以开始图像采集过程;D1=1表示已完成1帧图像采集,可以读取数据寄存器(CAP_DATAr)的图像数据。
DB200工作的地址范围是:1100 0000 0000 0000 ~ 1110 0000 0000 0000 = 0C00H ~ 0E00H。
据此,我们可写出如下图像采集函数(例程3):#define CAP_CONTROLr XBYTE[0X0C000] //A15=1=A14, A13=0#define CAP_STATUSr XBYTE[0X0C000]void img_capture( ) // (例程3--图像采集):{ while(!(CAP_STATUSr & 0x01)); // 检查DB200是否准备就绪?CAP_CONTROLr=0xff; // 启动采集1帧图像过程。
while(!(CAP_CONTROLr & 0x02)); // 是否采集完1帧图像?是就结束。
}img_capture( )函数只完成了1帧图像数据的采集,采集好的数据存在DB200的数据缓冲区内,留待Send_img( )函数读取和发送。
Send_img( )是以读1行图像数据就发送1行的方式工作。
其源码如下:#define CAP_INCr XBYTE[0X0E000] //A15=1=A14,A13=1#define CAP_DATAr XBYTE[0X0E000]extern UCHAR xdata outbuf[1520];void Send_img( ) // (例程4--图像数据的读取和发送):{ UINT data Colon, Line ;for(Line=0;Line<288;Line++) // 288行{ for(Colon=0;Colon<385;Colon++) // 385 列{ databuf[Colon]=CAP_DATAr; // 从db200读1个像点到databuf。
CAP_INCr=0xff; // db200图像数据缓存地址加1。
}udp_send(databuf, UDP_PORT, 386); // 封装并发送1行图像数据。
}}3.4 图像数据的封装DB200采集完1帧图像后,通过数据总线传送给89C52;89C52则将图像数据按TCP/IP协议封装成以太网帧(图3),然后通过数据总线送给RTL8019AS;RTL8019AS则将以太网帧经RJ45接口送到10M以太网上。
从图3可以看到,每个以太网帧的最大长度为1518字节,最小为64字节。
其数据部分最大为1500字节,最小为46字节。
每个UDP数据传输前,必须加上8字节的UDP头来构成UDP数据报;再加上20字节的IP头来构成IP数据报;最后加上14字节的帧头来构成以太网帧。