基于三边测量法的移动锚节点定位方案
基站三角定位法
基站三角定位法
基站三角定位法是一种常用的定位技术,它通过测量移动终端与多个基站之间的信号传播时间或信号强度,计算出移动终端的位置。
具体来说,它需要在移动终端和多个基站之间建立信号连接,然后通过测量信号的传播时间或信号强度来计算移动终端与基站之间的距离。
最后,通过三角几何运算,可以计算出移动终端的具体位置。
该方法在城市、郊区和山区等不同地形条件下均具有较高的定位精度和可靠性,因此在移动通信、智能交通、智慧城市等领域得到了广泛应用。
同时,该方法还可以结合其他定位技术,如卫星定位、惯性导航等,实现更高精度的定位。
三点定位原理

三点定位原理三点定位原理是一种在导航和定位领域广泛应用的定位技术。
它通过测量接收器与至少三个卫星之间的距离来确定接收器的位置,从而实现精准定位。
这种原理已经被广泛应用于GPS导航、地图定位、无人机导航等领域。
下面将详细介绍三点定位原理的工作原理、应用场景和未来发展方向。
三点定位原理的工作原理是基于三角测量原理的。
当接收器与至少三颗卫星之间的距离确定后,就可以得出接收器所在的位置。
这是因为,三个点确定一个平面,因此通过三个卫星的距离可以确定接收器所在的平面位置。
而接收器与卫星的距离可以通过卫星发射的信号与接收器接收的信号之间的时间差来计算。
通过精确测量这些时间差,就可以确定接收器的位置。
这种原理在实际应用中被广泛使用,因为它可以实现高精度的定位。
三点定位原理在现代导航和定位技术中有着广泛的应用。
其中最典型的应用就是GPS导航系统。
通过接收卫星发射的信号,GPS接收器可以计算出自己的位置,并在地图上显示出来。
这种技术已经被广泛应用于汽车导航、航空导航、船舶导航等领域。
此外,三点定位原理还被应用于地图定位、无人机导航等领域。
可以说,三点定位原理已经成为现代导航和定位技术的基础。
未来,随着技术的不断发展,三点定位原理也将得到进一步的完善和应用。
例如,通过增加卫星数量和改进信号处理算法,可以提高定位的精度和稳定性。
另外,结合人工智能和大数据技术,可以实现更加智能化的定位系统,为用户提供更加个性化的定位服务。
同时,三点定位原理还可以应用于更多的领域,如智能交通、智能城市等,为人们的生活带来更多的便利。
总的来说,三点定位原理是一种在导航和定位领域广泛应用的定位技术,它通过测量接收器与至少三个卫星之间的距离来确定接收器的位置。
这种原理已经被广泛应用于GPS导航、地图定位、无人机导航等领域,并且在未来有着更广阔的发展空间。
相信随着技术的不断进步,三点定位原理将会为人们的生活带来更多的便利和惊喜。
三边定位法计算过程

三边定位法计算过程
三边定位法,又称距离角定位法或三边测量法,是一种非常常见的测量方法,它主要利用三条已知长度的边和它们之间的角度来确定一个点的位置。
三边定位法计算过程如下:
第一步:进行测量
首先,需要在地面上挑选三个相对固定的点作为基准点,然后测量它们之间的距离,并记录下来。
这个过程一般使用测量工具,如测距仪、经纬仪、全站仪等设备,可以获得高精度的测量结果。
第二步:计算角度
在测量好三条边的长度之后,接下来需要测量它们之间的角度。
这个过程有多种方法,如使用经纬仪、全站仪、测角仪等工具,也可以通过手动测量来获得角度值。
具体的计算公式如下:
角度 = 弧度* 180 / π
其中,弧度值可以通过计算两边之间的比例来获得。
第三步:计算坐标
在获得三个点的距离和角度值之后,就可以开始计算需要的坐标位置。
不同的计算方法会有不同的公式,但它
们的本质都是基于三角函数来进行计算的。
以下是一个常用的计算公式:
cosC = (a^2 + b^2 - c^2) / 2ab
sinC = √(1 - cos^2C)
其中,a、b、c分别表示三边长度,C表示夹角,使用这个公式可以获得坐标位置。
第四步:检查精度
在计算完坐标位置之后,需要对结果进行校验,确保其精度符合要求。
这个过程一般需要对测量数据进行再次比对,并对计算方法进行反复检查,确保数据的准确性。
总体而言,三边定位法是一种非常常见、精度较高的测量方法。
其计算过程虽然相对繁琐,但只要按照规定的步骤进行操作,并严格控制测量的误差,就可以得到高质量的测量结果。
一种基于移动锚节点的静态无线传感器网络定位算法构建和分析

动锚节点就是具 备移动能力并且配 置 自身定位设备的节点 。 在 数据包 , 以及信标数据包 中的发射该信标 的信标点位置的信息 无线传感器 网络的使 用中具体 的分布 在无线传 感器网络 中的位 就能详细 的确 定, 在移动锚节点中通信 的传感 器节点可 以接 收 置节点中, 来提 供可靠的辅助信息 , 并且按照一定的算法 来计算 到信 标数据 包 , 在 测量 的同时根 据节点间的连 同信 息或者是3 自身的估计位 置。 个 以上 的测量距 离来估 计 自身的位 置。 本文在结合使用R S S I 、
无线 天地 ・
种基于移动锚节点的静态 无线传感器网络定位算法构建和分析
一
黄衍玺( 南京 航空航天大学, 江苏 南京 2 1 0 0 1 6 )
摘 要: 随着网络技术在深入的发展 , 静态无线传感器网络主要是通过引入网络技术中具有数据采集能力、 信息处理能力以及无线通信的能
力 的传感 器节点进行 相 互交换 信息 , 并且协调控 制有机相 结合。 该技 术 的已经被 广泛的应用于生活中的各 个领 域中, 在 移动锚 节I 量 的使 用中, 改 变了 静 态无线传感 器网络在 发 展中遇 到了环境 恶劣、 不可到达 区域最 终 实现了 监 测和跟 踪的任务 , 有效 的控 制了节点位 置的具 体信息。
关键词: 移动锚节点; 静态无线传感器; 网络定位; 算法构建
在静态无线传感 器网络定位 的使用中, 将信息进行交通信量 , 避免了在测量 中的误 差影
但是无需测距定位 , 在使用 中能够减 小节点的尺寸, 满足了 有 效 的控制 了有 机体的结合, 最终实现 了物与物 的互联 , 将感 响。
1 . 2静态无线传感器网络定位算法分类
静态无 线传 感 器 网络定位 的算法 主要 有 :( 1 )基于测 距
三边测量定位算法c语言
三边测量定位算法c语言三边测量定位算法是一种基于距离的定位算法,通过已知三个点的坐标和与这三个点之间的距离,可以求解未知点的坐标。
下面是一个简单的三边测量定位算法的C语言实现:```cinclude <>include <>// 已知三个点的坐标和与这三个点之间的距离double x1 = 0, y1 = 0, x2 = 1, y2 = 1, x3 = 2, y3 = 2;double d1 = sqrt(2), d2 = sqrt(2), d3 = sqrt(2);// 求解未知点的坐标void solve() {double a = pow(x2 - x1, 2) + pow(y2 - y1, 2); // 边1的长度平方double b = pow(x3 - x2, 2) + pow(y3 - y2, 2); // 边2的长度平方double c = pow(x1 - x3, 2) + pow(y1 - y3, 2); // 边3的长度平方double D = 2 (x1 (y2 - y3) + x2 (y3 - y1) + x3 (y1 - y2)); // 三边长度乘积之和double delta = pow(D, 2) - 4 (a b + b c + c a); // 判别式if (delta > 0) { // 有两个解double x1 = (-b + sqrt(delta)) / (2 a); // 一个解的x坐标double y1 = (a y1 - b x1 + D) / (2 a); // 一个解的y坐标printf("The coordinates of the unknown point are (%f, %f)\n", x1, y1);double x2 = (-b - sqrt(delta)) / (2 a); // 另一个解的x坐标double y2 = (a y1 - b x1 - D) / (2 a); // 另一个解的y坐标printf("The coordinates of the unknown point are (%f, %f)\n", x2, y2);} else if (delta == 0) { // 一个解double x = -b / (2 a); // 解的x坐标double y = (a y1 - b x + D) / (2 a); // 解的y坐标printf("The coordinates of the unknown point are (%f, %f)\n", x, y);} else { // 无解printf("No solution exists.\n");}}int main() {solve();return 0;}```在这个实现中,我们首先定义了三个已知点的坐标和与这三个点之间的距离。
dvhop三边测量法MATLAB,基于非测距的DV-Hop定位算法改进

dvhop三边测量法MATLAB,基于⾮测距的DV-Hop定位算法改进⽆线传感器⽹络是由⼤量随机分布的传感器节点组成,是⼀种分布式的、⾃组织的⽹络。
其关键技术包括:⽹络拓扑控制、节点定位、时钟同步、数据融合、路由协议等。
⽽节点定位问题则是⽆线传感器⽹络中的⼀个最为基本和重要的问题。
⽬前,⽆线传感器⽹络定位算法可以分为基于测距和基于⾮测距的定位算法。
基于测距定位常⽤的测量⽅法有TOA、TDOA、AOA、RSSI,尽管这些技术相对精度⾼,但是对硬件要求很⾼。
基于⾮测距定位常⽤的测量⽅法有:DV- Hop、质⼼、APIT、MDSMAP。
DV-Hop为典型的基于⾮测距定位,其对硬件要求低,实现简单。
它的不⾜之处在于计算平均跳距及定位坐标时会产⽣误差。
因此针对DV-Hop算法的缺陷,提出了⼀系列的改进算法,包括:对原始算法中的平均跳距进⾏改进,使⽤多个锚节点估算平均距离并且采⽤归⼀化加权的平均跳距;提出基于⼏何学的定位算法,利⽤⼏何学中的斜率⽅法来判断锚节点间的位置关系,从中选取最优的锚节点序列,从⽽更精确地确定未知节点;引⼊共线度的概念,利⽤共线度参数,动态地调节未知节点可以收集的邻居锚节点的距离阈值,挑选⽹络中好的锚节点组进⾏位置估计,最后再⽤加权估计机制来得到最终的节点位置估计。
这些⽅法都在⼀定程度上提⾼了定位精度。
本⽂针对DV-Hop算法中计算平均跳距和三边定位两⽅⾯存在的定位误差,提出了改进的算法。
⾸先利⽤全⽹平均跳距来纠正单个锚节点的平均跳距,然后在最后计算三边定位时,利⽤节点间连通度的不同,选择最优组合的3个锚节点来参与定位,进⼀步提⾼定位精度。
1 DV-Hop算法介绍美国路特葛斯⼤学的Dragos Niculescu等⼈利⽤距离⽮量路由和GPS定位原理提出⼀系列分布式定位算法,合称APS,DV-Hop算法就是其中的⼀种。
DVHop分为3个步骤实现:① 锚节点i⼴播⾃⾝的位置信息IDi。
初始跳数0,每发送⼀个节点信息,跳数就加1,然后转发,直到⽹络中所有的节点都收到锚节点的信息包。
Trilateration三边测量定位算法
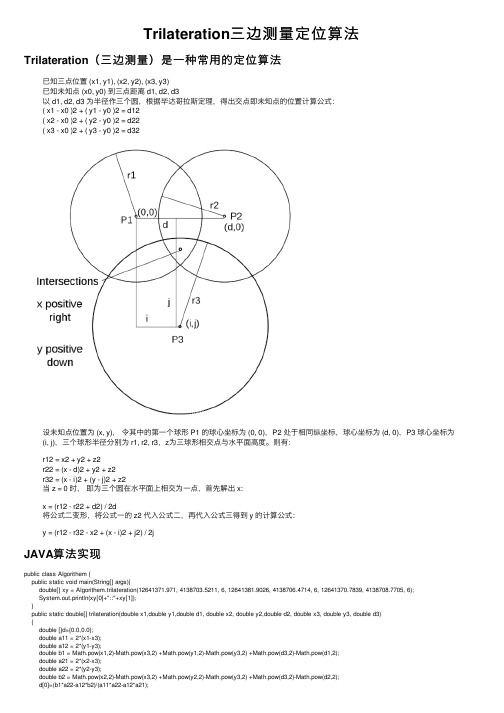
Trilateration三边测量定位算法Trilateration(三边测量)是⼀种常⽤的定位算法已知三点位置 (x1, y1), (x2, y2), (x3, y3)已知未知点 (x0, y0) 到三点距离 d1, d2, d3以 d1, d2, d3 为半径作三个圆,根据毕达哥拉斯定理,得出交点即未知点的位置计算公式:( x1 - x0 )2 + ( y1 - y0 )2 = d12( x2 - x0 )2 + ( y2 - y0 )2 = d22( x3 - x0 )2 + ( y3 - y0 )2 = d32设未知点位置为 (x, y),令其中的第⼀个球形 P1 的球⼼坐标为 (0, 0),P2 处于相同纵坐标,球⼼坐标为 (d, 0),P3 球⼼坐标为(i, j),三个球形半径分别为 r1, r2, r3,z为三球形相交点与⽔平⾯⾼度。
则有:r12 = x2 + y2 + z2r22 = (x - d)2 + y2 + z2r32 = (x - i)2 + (y - j)2 + z2当 z = 0 时,即为三个圆在⽔平⾯上相交为⼀点,⾸先解出 x:x = (r12 - r22 + d2) / 2d将公式⼆变形,将公式⼀的 z2 代⼊公式⼆,再代⼊公式三得到 y 的计算公式:y = (r12 - r32 - x2 + (x - i)2 + j2) / 2jJAVA算法实现public class Algorithem {public static void main(String[] args){double[] xy = Algorithem.trilateration(12641371.971, 4138703.5211, 6, 12641381.9026, 4138706.4714, 6, 12641370.7839, 4138708.7705, 6);System.out.println(xy[0]+"::"+xy[1]);}public static double[] trilateration(double x1,double y1,double d1, double x2, double y2,double d2, double x3, double y3, double d3){double []d={0.0,0.0};double a11 = 2*(x1-x3);double a12 = 2*(y1-y3);double b1 = Math.pow(x1,2)-Math.pow(x3,2) +Math.pow(y1,2)-Math.pow(y3,2) +Math.pow(d3,2)-Math.pow(d1,2);double a21 = 2*(x2-x3);double a22 = 2*(y2-y3);double b2 = Math.pow(x2,2)-Math.pow(x3,2) +Math.pow(y2,2)-Math.pow(y3,2) +Math.pow(d3,2)-Math.pow(d2,2);d[0]=(b1*a22-a12*b2)/(a11*a22-a12*a21);d[1]=(a11*b2-b1*a21)/(a11*a22-a12*a21);return d;}}D3.js实现定义三个圆的坐标及半径,计算出交点的坐标 (obj_x, obj_y).var x_0 = 150, y_0 = 150;var x_1 = x_0, y_1 = y_0, d = 150, x_2 = x_0 + d, x_3 = 225, y_3 = 315, r = 100;var i = x_3 - x_0, j = y_3 - y_0;var x = (Math.pow(r, 2) - Math.pow(r, 2) + Math.pow(d, 2)) / (2 * d) + x_0;var obj_x = x + x_0;var y = (Math.pow(r, 2) - Math.pow(r, 2) - Math.pow(x, 2) + Math.pow((x - i), 2)+ Math.pow(j, 2)) / (2 * j);var obj_y = y + y_0;绘出圆形及交点:svg.append("circle").attr("cx", x_1).attr("cy", y_1).attr("r", r).style("fill", "blue").style("opacity", 0.3);svg.append("circle").attr("cx", x_2).attr("cy", y_0).attr("r", r).style("fill", "red").style("opacity", 0.4);svg.append("circle").attr("cx", x_3).attr("cy", y_3).style("opacity", 0.5).attr("r", r).style("fill", "yellow");svg.append("circle").attr("cx", obj_x).attr("cy", obj_y).attr("r", 3).style("fill", "red");多于⽤实现定位算法,与之相同的也许还可以采⽤K-Means或Overlap聚类算法,后两者在地图标注上使⽤⽐较⼴。
基于一个移动锚节点的无线传感器网络节点定位算法

基于一个移动锚节点的无线传感器网络节点定位算法
胡炜薇;胡冀;应智花
【期刊名称】《系统仿真学报》
【年(卷),期】2010()4
【摘要】节点定位技术是无线传感器网络应用的重要支撑技术之一,对此提出了一种基于移动锚节点的两步定位算法。
该算法利用一个移动锚节点遍历整个网络,并周期性的广播包含自身当前位置的信息。
把传感器节点的自身定位过程用基于无迹状态滤波(UKF)的目标跟踪方法实现。
由于所用的目标状态模型和量测模型有一定的不确定性,所以先选取不共线3个锚节点信息,利用三边定位法提高滤波的初始位置精度,从而改善定位效果。
最后仿真并分析比较了锚节点在多种移动轨迹情况下节点定位误差,结果表明本文所述两步定位法改善了对锚节点移动轨迹的特殊要求的限制,更适合实际情况,并取得理想的定位精度。
【总页数】5页(P978-982)
【作者】胡炜薇;胡冀;应智花
【作者单位】杭州电子科技大学电子信息学院
【正文语种】中文
【中图分类】TP393
【相关文献】
1.一种基于移动锚节点的静态无线传感器网络定位算法构建和分析
2.无线传感器网络中基于移动锚节点的APIT的改进定位算法
3.基于虚拟力的单个移动锚节点无线
传感器网络定位算法4.基于移动锚节点无线传感器网络定位的算法5.基于移动锚节点的无线传感器网络节点定位算法
因版权原因,仅展示原文概要,查看原文内容请购买。
基于锚节点等边三角形分布的质心定位算法研究

格划分的合理性 ; 通过 实验, 探 索各项参数对于这种新算法的影响. 仿真结果表明, 该算法在结构简 单、 硬 件投入 和功 耗相 对较 少的情 况下 , 提 高 了节 点定位 的精确度 . 但 该算 法在锚 节点数 量和 计算 量
上都 有所增 加 , 有待 下一步 改进. 关键词 : 无 线传 感 网络 ; 等边 三 角形 分布 ; 质心 定位 ; 节点 定位
r e d u n d a n c y i n t h e s q u a r e g id r p o s i t i o ni n g lg a o it r h m, a n e w c e n t r o i d l o c li a z a t i o n a lg o it r h m b a s e d o n t h e a n c h o r n o de s e q ui l a t e r a l t ia r n g u l a r d i s t ib r u t i o n wa s p r o p o s e d. Th e a l g o it r h m us e d t h e t h e o r y o f me s hi ng t o
中 图分 类号 : T P 3 9 3 文献标 志码 : A D O I : 1 0 . 3 9 6 9 / j . i s s n . 2 0 9 5— 4 7 6 X. 2 0 1 3 . 0 5 . 0 1 3
Re s e a r c h o f c e n t r o i d l o c a l i z a t i o n a l g o r i t h m b a s e d o n t he a nc h o r n o d e s e q ui l a t e r a l t r i a ng ul a r di s t r i b ut i o n
三角测量定位方法
三角测量定位方法一、引言定位是现代社会中非常重要的一个环节,无论是个人还是企业,都需要准确地确定自己的位置。
而三角测量定位方法作为一种常用的测量手段,具有较高的精度和可靠性,被广泛应用于地理测量、导航系统以及通信网络等领域。
本文将详细介绍三角测量定位方法的原理和实施步骤。
二、三角测量定位原理三角测量定位方法的基本原理是利用三角形的一些特定性质来确定未知位置的坐标。
具体来说,就是通过观测已知位置的两个点与未知位置的一个点之间的角度和距离关系,计算出未知位置的坐标。
这里涉及到三角形的两个基本定理:正弦定理和余弦定理。
1. 正弦定理正弦定理指出,在一个三角形中,任意一边的长度与对应的角的正弦值成比例。
即对于三角形ABC,有以下关系式:a/sinA = b/sinB = c/sinC其中,a、b、c分别为三角形的三边长度,A、B、C为对应的角度。
2. 余弦定理余弦定理指出,在一个三角形中,任意一边的平方等于其他两边平方和减去两倍的两边长度的乘积和对应两边夹角的余弦值的乘积。
即对于三角形ABC,有以下关系式:c^2 = a^2 + b^2 - 2abcosC其中,c为三角形的一边长度,a、b为另外两边长度,C为对应的角度。
三、三角测量定位步骤三角测量定位方法的实施步骤一般包括以下几个环节:1. 观测角度需要选择已知位置的两个点,并利用测量仪器(如经纬仪、全站仪等)测量出这两个点与未知位置的点之间的角度。
这里可以使用水平角度和垂直角度来表示,以确保测量结果的准确性。
2. 测量距离除了角度,还需要测量已知位置的两个点与未知位置的点之间的距离。
通常情况下,可以使用测距仪、激光测距仪等仪器进行测量。
需要注意的是,测量时要保持仪器与目标点之间的直线,以避免误差的产生。
3. 计算位置一旦完成角度和距离的测量,就可以利用三角函数的关系式计算出未知位置的坐标。
根据已知位置和测量结果,可以得到一组方程,通过求解这组方程,就可以得到未知位置的坐标。
三边定位技术原理

三边定位技术原理三边定位技术是一种常用的测量方法,其原理是利用三个已知长度的线段来唯一确定一个点或物体的位置。
三边定位技术是一种基础的测量方法,应用广泛,在工业、建筑、航空航天、军事等领域都有广泛的应用。
三边定位技术一般包括以下几个步骤。
1. 选择三个基准点三个基准点应满足以下要求:相互之间不在同一条直线上,距离尽量相等,且围成一个封闭区域。
基准点的选取是基于测量的需要和实际环境条件来确定的,在实际应用中,可以选择天然物体、固定点或特制的基准点。
2. 测量三边的长度用测量仪器,如测距仪、镜像测距仪、雷达仪等,分别测量三个基准点之间的距离,并保留相应的精度误差范围。
精度误差范围是测量时由于仪器的精度限制或环境因素所带来的误差范围,通常在公差范围内。
由此可以得到三边的长度值L1、L2和L3。
3. 计算待测点的坐标利用三边长度值和基准点坐标,可以计算待测点的坐标。
待测点在三角形内的位置可以用三边的长度值和三个基准点的坐标来确定。
一般来说,可以利用余弦定理或正弦定理计算待测点的坐标。
具体数学公式如下:(1)余弦定理:设三边长度分别为L1、L2和L3,对应的夹角分别为α、β和γ,待测点到基准点的距离分别为d1、d2和d3,则待测点坐标为:x = ([d1^2-L1^2+d2^2-L2^2+d3^2-L3^2]/2)/d3y = sqrt(d1^2-x^2-L1^2)(2)正弦定理:设三角形的高为h1、h2和h3,半周长为s,则待测点坐标为:三边定位技术的原理基于几何学的三角函数定理,通过测量三条边的长度,利用三角函数公式推算待测点在平面(二维)或空间(三维)中的位置。
三边定位技术能够高精度地确定待测点的位置,适用于各种地形环境和测量要求。
其应用领域广泛,如航空航天、建筑测量、地质勘探、机器人导航、水下探测和车辆导航等。
随着技术的发展,三边定位技术将在各个领域中得到更为广泛的应用。
三边测量法

三边测量法1. 引言三边测量法是一种常用的地理测量方法,用来测量地球上任意两点之间的距离。
在地理测量中,通常通过测量地球表面上的三个固定点(也称为三角点)之间的边长,以及这些三角点与待测点之间的角度,来计算待测点的位置。
本文将详细介绍三边测量法的原理、步骤以及应用。
2. 原理三边测量法的核心原理是三角学中的三角形相似性。
当我们知道一个三角形的三个边长和一个角度时,可以根据三角形相似性原理推算出另一个三角形的边长和角度。
在三边测量法中,我们通过测量已知三角形的边长和角度,然后应用三角形相似性原理,推算出待测点与已知三角形之间的距离。
3. 步骤三边测量法通常需要经过以下几个步骤:3.1 选取三角点首先需要选择三个已知位置的固定点,也称为三角点。
这些三角点通常是地理测量中经过精确测量并统一记录的标志性地点,如山顶、建筑物或者其他地理特征点。
选取合适的三角点对于测量的准确性至关重要。
3.2 取得边长和角度数据在选择好三角点后,需要使用测量工具(如测距仪、经纬仪等)来测量已知三角形的边长和角度。
这些测量数据将作为计算待测点位置所需的基本数据。
3.3 计算待测点位置根据已知三角形的边长和角度,以及三角形相似性原理,可以推算出待测点与已知三角形之间的距离。
常用的计算方法有正弦定理、余弦定理等。
3.4 精确度校验完成计算后,需要对测量的精确性进行校验。
通常可以通过多次重复测量并对比结果来判断测量的准确性。
如果测量值存在明显偏差,可能需要重新测量或调整测量方法。
4. 应用三边测量法在地理测量中有着广泛的应用。
以下列举了几个常见的应用场景:4.1 地图制作在制作地图时,常常需要准确测量地理位置之间的距离。
三边测量法可以帮助地理学家和地图制作人员确定两个地点之间的实际距离,并将其用于地图比例尺的选择。
4.2 导航定位导航系统在确定用户位置时,通常会使用三边测量法。
通过测量用户与已知地点之间的距离,结合卫星定位或其他定位技术,可以精确计算出用户的位置,并提供导航指引。
无线传感网络中基于锚节点动态路径规划的节点定位算法研究

重庆邮电大学硕士学位论文摘要摘要无线传感网络由分布在空间中的大量廉价传感器节点组成,由于其具有自组织、低成本和易于部署等优点,广泛应用于环境监测、智能家居、军事和工业等领域中。
在这些应用中,节点定位技术是无线传感器网络的关键技术之一。
只有当传感器节点的位置可知时,该节点所收集的数据才具用实用价值。
为了减少节点能耗,同时提高定位性能,本文利用移动锚节点辅助未知节点完成定位,其中考虑监测区域内未知节点的分布情况规划锚节点的移动路径,在提高节点定位性能的同时减少锚节点移动路径的长度将是本文的研究重点。
针对未知节点静止、锚节点移动的定位场景,本文提出一种基于网络拓扑信息分簇的锚节点动态路径规划算法。
该算法首先利用网络中未知节点的密集度对网络进行分簇,选取密集度最大的未知节点作为簇头节点。
其次,利用模拟退火算法求解出簇头节点的遍历顺序,得出锚节点的全局移动路径。
最后,通过几何分析发现,当参与定位的锚节点之间呈正三角形分布时,节点定位误差最小。
因此采用正三角形的路径对簇内的未知节点进行覆盖,从而得到锚节点的局部移动路径。
仿真结果表明,所提出的算法能够适应不同拓扑类型的传感器网络,在提升定位精度和节点定位率的同时能够有效缩短锚节点的移动路径。
针对未知节点和锚节点均移动的定位场景,本文提出一种基于定位效益的锚节点路径规划算法。
该算法首先根据未知节点的运动模型及其一跳邻居信息定义定位效益,然后结合定位效益遍历锚节点的移动盒子以确定锚节点下一时刻的最优位置。
在定位阶段,利用接收信号强度指示测距模型缩小蒙特卡罗盒定位算法中的采样区域。
为了满足锚节点密度较低的监测区域的未知节点的定位需求,利用平均定位偏移量选出辅助锚节点参与到未知节点的定位中。
仿真结果表明,此算法具有较好的定位性能,并且当锚节点数量较少时仍能保证定位率和定位精度。
关键词:无线传感器网络,节点定位,移动锚节点,动态路径规划1重庆邮电大学硕士学位论文AbstractAbstractWireless sensor networks are composed of a large number of inexpensive sensor nodes,due to its advantages of self-organization,low cost and easy deployment,which is widely used in the field of environmental monitoring,smart home,military,industry and so on.In the above applications,node localization technology is one of the key technologies of wireless sensor networks.Only when the location of the sensor node is known can the data collected by the node be of practical value.In order to reduce energy consumption of nodes and improve localization performance,the mobile anchor node is used to assist unknown nodes to complete localization in the thesis.The path planning of anchor according to the distribution of unknown nodes in the monitoring region and reducing the length of the path of anchor while increasing the localization performance are the research emphases in the thesis.A dynamic path planning algorithm of anchor node based on network topology information clustering is proposed for the localization scenarios of stationary unknown node and moving anchor node in this thesis.Firstly,the network is clustered according to the density of unknown nodes,selecting the unknown node with the highest density as the cluster head node.Secondly,the traversal order of cluster head nodes is solved by simulated annealing algorithm to obtaining the global moving path of anchor node. Finally,it is found that the localization error of nodes is minimum when there is a triangular distribution between anchor nodes participating in localization through geometric analysis.Therefore,the path of equilateral triangle is used to cover the unknown node in the cluster as the local moving path of the anchor node.Simulation results show that the proposed method can adapt to wireless sensor networks with different topology,and can effectively shorten the moving path of anchor node while improving the localization accuracy and node localization rate.A path planning algorithm of anchor node based on localization benefit is proposed for the localization scenarios of moving unknown node and anchor node in this thesis. Firstly,the localization benefit according to the motion model of the unknown node and its one-hop neighbor information is defined.And then the moving box of the anchor node is traversed combining with the localization benefit to determine the optimal location of the anchor node at the next moment.The sampling area in the Monte Carlo2重庆邮电大学硕士学位论文Abstractlocalization boxed is reduced by using the received signal strength indication ranging in the localization phase.In order to meet the localization requirements of unknown nodes in the monitoring area with low density of anchor node,the auxiliary anchor nodes are selected to participate in the localization of unknown nodes by using the average localization offset.The simulation results show that this algorithm has better localization performance and can guarantee the localization rate and accuracy when the number of anchor nodes is smaller.Keywords:wireless sensor networks,node localization,mobile anchor node, dynamic path planning3重庆邮电大学硕士学位论文目录目录图录 (6)注释表 (8)第1章绪论 (1)1.1研究背景及意义 (1)1.2国内外研究现状 (2)1.3本文的研究内容和组织结构 (5)1.3.1本文的研究内容 (5)1.3.2本文的组织结构 (5)第2章WSNs中基于移动锚节点的节点定位算法研究 (7)2.1基于移动锚节点的节点定位概述 (7)2.2基于移动锚节点的路径规划算法 (7)2.2.1锚节点随机移动 (7)2.2.2锚节点静态路径规划 (8)2.2.3锚节点动态路径规划 (11)2.3定位性能评价指标 (15)2.4本章小结 (16)第3章基于网络拓扑信息分簇的锚节点动态路径规划算法 (17)3.1网络分簇算法 (18)3.2锚节点全局移动路径 (19)3.3锚节点局部移动路径 (22)3.4仿真分析 (24)3.4.1锚节点移动路径图 (24)3.4.2锚节点路径长度对比 (26)3.4.3定位性能对比 (26)3.5本章小结 (28)第4章节点定位中基于定位效益的锚节点路径规划算法研究 (29)4重庆邮电大学硕士学位论文目录4.1基于定位效益的锚节点自适应移动算法 (29)4.1.1系统摸型 (29)4.1.2定位效益模型 (31)4.1.3锚节点最优位置选取 (33)4.2基于辅助锚节点的MCB定位算法 (34)4.2.1基于RSSI值的采样盒优化 (35)4.2.2辅助锚节点选择 (37)4.3仿真结果与分析 (38)4.3.1定位性能随时间变化情况 (38)4.3.2定位性能随节点最大移动速度变化情况 (40)4.3.3定位性能随锚节点数量变化情况 (41)4.4本章小结 (41)第5章总结与展望 (43)5.1本文工作总结 (43)5.2后续工作展望 (44)参考文献 (45)致谢 (49)攻读硕士学位期间从事的科研工作及取得的成果 (50)5重庆邮电大学硕士学位论文图录图录图2.1静态路径规划模型 (9)图2.2三边测量法 (10)图2.3MCL算法采样范围示意图 (12)图2.4滤波条件示意图 (13)图2.5锚盒子示意图 (14)图2.6采样盒子 (15)图3.1节点之间通信的数据包格式 (18)图3.2未知节点密集权重示意图 (18)图3.3定位误差区域示意图 (23)图3.4误差区域放大图 (23)图3.5矩形分布下锚节点移动路径图 (25)图3.6C形分布下锚节点移动路径图 (25)图3.7不同网络拓扑下锚节点移动路径长度对比 (26)图3.8不同通信半径下节点定位率对比 (27)图3.9不同通信半径下定位误差对比 (28)图4.1未知节点移动盒子 (30)图4.2锚节点通信盒子 (30)图4.3定位效益模型 (31)图4.4锚节点位置寻优过程中最大覆盖范围 (32)图4.5加入邻居节点信息后的定位效益模型 (32)图4.6锚节点移动盒子遍历法示意图 (34)图4.7辅助锚节点示意图 (36)图4.8根据RSSI值限定采样区示意图 (36)图4.9结合移动盒子与RSSI值限定采样区示意图 (37)图4.10定位偏移量示意图 (37)图4.11定位性能随时间变化图 (39)6重庆邮电大学硕士学位论文图录图4.12定位性能随节点移动速度变化图 (40)图4.13定位性能随锚节点数量变化图 (41)7重庆邮电大学硕士学位论文注释表8注释表AOAAngle of Arrival ,到达角度APITApproximate Point in Triangle Test ,三角形近似点测试法DV-HOPDistance Vector-Hop ,基于距离向量的多跳算法DWSNsDynamic Wireless Sensor Networks ,动态无线传感器网络GMMWGauss-Markov Mobility Model ,高斯马尔科夫移动模型GPSGlobal Positioning System ,全球定位系统LMATLocalization with a Mobile Anchor Node Based on Trilateration ,基于正三角形的移动锚节点定位MCBMonte Carlo Localization Boxed ,蒙特卡罗盒定位MCLMonte Carlo Localization ,蒙特卡罗定位MDS-MAPMultidimensional Scaling-map ,多维标度MMCLMulti-Hop Based on Monte Carlo Localization ,一种基于多跳的蒙特卡罗定位NPNon-deterministic Polynomial ,非确定性多项式OGBMOptimal Grid Benefit Maximum ,节点效益最大化优化算法PPALB Path Planning Algorithm of Anchor Node Based on Localization Benefit ,基于定位效益的锚节点路径规划算法PPTCDynamic Path Planning Algorithm of Anchor Node Based on NetworkTopology Information Clustering ,基于网络拓扑信息分簇的锚节点动态路径规划算法RSSIReceived Signal Strength Indicator ,接收信号强度指示RWMRandom Walk Model ,随机移动模型RWPMRandom Waypoint Mobility Model ,随机路点移动模型SWSNsStatic Wireless Sensor Networks ,静态无线传感器网络TDOATime Difference of Arrival ,到达时间差TOA Time of Arrival ,到达时间重庆邮电大学硕士学位论文注释表TSP Traveling Salesman Problem,旅行商问题VFMS Mobility Strategy for Anchor Node Based on Virtual Forces,基于虚拟力的锚节点移动策略WSNs Wireless Sensor Networks,无线传感器网络重庆邮电大学硕士学位论文第1章绪论第1章绪论1.1研究背景及意义无线传感器网络(Wireless Sensor Networks,WSNs)以无线通信技术、计算机技术、微电子技术和传感器技术等技术为基础。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
定位覆盖率、定位精度以及移动锚节点的能耗有很
大影响。一般认为,最优的锚节点移动路径需要满
足两个条件,一是能够提供良好的网络覆盖范围,确
保区域内所有节点都至少三个非共线
的有效信号。
典型 的 移 动 锚 节 点 路 径 规 划 主 要 分 为 两 类[8 - 10],一类是随机移动模型,如随机游走模型、高
0 引言
无线传感器网络是一种多跳的自组织网络系 统,它由大量的微型传感器节点组成,节点之间通过 无线的方 式 进 行 通 信[1]。 随 着 人 工 成 本 的 不 断 上 升,生产领域对提高设备自动化水平的需求日益迫 切。在数据采集与处理方面,无线传感器网络具有 比较明显的优势,因此引起了学术界、产业界和各国 政府的普遍关注。目前,无线传感器网络已经与经 济社会发展的各个方面深度融合,在气象监测、抢险 救灾、目标跟踪等领域发挥不可替代的作用[2]。作 为上述应用的重要支撑环节,无线传感器网络节点 定位技术一直是研究的热点。根据定位过程是否需 要测距,节点定位可以分为基于测距的方法和无需 测距的方法[3 - 4]; 根据锚节点是否移动,可以分为静 态锚节点定位和动态锚节点定位[5 - 6]。静态锚节点
斯 - 马尔科夫模型等; 另一类是非随机移动模型,包
括以 SCAN 型、DOUBLE SCAN 型以及 HILBERT 型
为代表的经典移动模型。其中,SCAN 型路径是最
简单、最容易实现的一种轨迹。
如图 1 所示,在 SCAN 型路径中,移动锚节点沿
着一个维度遍历监测区域,两条连续的平行轨迹之
间的距离定义为移动路径间隔 S( 或轨迹分辨率) 。
问题。锚节点的移动路径往往对网络中未知节点的
收稿日期: 2018 - 10 - 21 基金项目: 江苏省高等学校自然科学研究面上项目 ( 18KJD14000-
2) ; 江苏 警 官 学 院 高 层 次 人 才 引 进 项 目 ( JSPI17GKZL201) ; 江苏警官学院科研创新团队( 2018SJYTD15 ) ; 江 苏 警 官 学 院 院 级 项 目 ( 2017SJYZY01,2017SJYZY02, 2017SJYZC05) 作者简介: 刘琛( 1990 - ) ,男,博士,讲师,研究方向为物联网技术。
Mobile anchor node localization scheme based on the trilateral measurement
LIU Chen,NI Xue-li
( Department of Computer Information and Cyber Security,Jiangsu Police Institute,Nanjing 210031,China)
Abstract: Determining the location of nodes is the primary issue for wireless sensor networks in sensing, collecting and processing related information in the monitoring area,which directly affects its application in practice. The basic concept of wireless sensor networks,the calculation method of node location and the typical path planning of mobile anchor nodes are introduced and a mobile anchor node localization scheme based on trilateral measurement is proposed. With all unknown nodes covered,the path planning of this scheme is relatively simple and can reach high accuracy. Key words: wireless sensor network; mobile anchor node; trilateral measurement; SCAN path; node localization scheme
假设传感器节点的通信半径为 R,若保证监测区域
内的所有节点都能接收到移动锚节点的信号,则移
动路径间隔 S 需要满足,当 S = 2R 时,移动锚节点
的路径长度 d 可以表示为[11]:
( ) d =
具有较好的定位效果,但对节点的部署密度要求较 高,常常面 临 成 本 高、部 署 难 等 问 题[7]。 基 于 动 态 锚节点的定位技术利用锚节点可以灵活移动的特 性,可以降低节点部署成本,改善网络结构,具有显 著的研究意义与实用价值。
1 移动锚节点定位技术
1. 1 移动锚节点的路径规划 路径规划是移动锚节点定位过程中的一个重要
文章编号: 1009 - 2552( 2019) 03 - 0029 - 04 DOI: 10. 13274 / j. cnki. hdzj. 2019. 03. 007
基于三边测量法的移动锚节点定位方案
刘 琛,倪雪莉
( 江苏警官学院计算机信息与网络安全系,南京 210031)
摘 要: 确定节点的位置是无线传感器网络对监测区域相关信息进行感知、采集和处理所面临 的首要问题,直接影响它在实际中的应用。文中介绍了无线传感器网络的基本概念、节点位置 的计算方法以及典型的移动锚节点路径规划,提出一种基于三边测量法的移动锚节点定位方案。 在保证遍历所有未知节点的前提下,该方案的路径规划较为简单,定位精度较高。 关键词: 无线传感器网络; 移动锚节点; 三边测量法; SCAN 路径; 节点定位 中图分类号: TP393 文献标识码: A