龙门加工中心整机动静态分析及结构优化
超重型龙门式加工中心的结构设计与优化
超重型龙门式加工中心的结构设计与优化随着制造业的发展以及对加工精度和效率的要求不断提升,超重型龙门式加工中心作为一种重要的设备在工业生产中扮演着重要的角色。
本文将就超重型龙门式加工中心的结构设计与优化进行探讨,以满足高精度、高效率的加工要求。
超重型龙门式加工中心的结构设计是整个设备设计的关键,它直接影响到设备的性能和稳定性。
在设计时,需要充分考虑以下几个方面:首先,要充分考虑刚度和稳定性。
超重型龙门式加工中心在加工过程中需要承受较大的切削力和惯性力,因此结构需要具有足够的刚度和稳定性,以确保加工精度和表面质量。
在设计时,可以采用梁式结构,增加横梁和支撑柱的数量和截面尺寸,以提高整个结构的刚度。
其次,要考虑设备的负载能力和运动平稳性。
超重型龙门式加工中心通常需要加工较大尺寸的工件,因此结构需要具有足够的负载能力,以支撑工件的重量和加工力。
在设计时,可以采用双柱龙门式结构,增加纵梁和支撑柱的截面尺寸和数量,以增加结构的负载能力。
同时,还可以采用滚动导轨和滚珠丝杠等技术,以提高设备的运动平稳性和精度。
另外,要考虑设备的刚性和动态特性。
超重型龙门式加工中心在加工过程中会产生较大的振动和冲击力,因此结构需要具有足够的刚性和抗震性。
在设计时,可以采用箱型梁或闭式结构,增加结构的强度和刚性。
同时,还可以采用减震器和振动消除技术,以降低设备的振动幅度和噪音,提高加工精度和表面质量。
最后,要考虑设备的维修和保养便捷性。
超重型龙门式加工中心通常由多个部件和机构组成,因此在设计时需要考虑设备的维修和保养便捷性。
在设计时,可以采用模块化设计和标准化部件,以方便维修和更换。
同时,还可以加装传感器和监测装置,实时监测设备的运行状态,及时发现故障并进行维修。
除了结构设计,超重型龙门式加工中心的优化也是提高设备性能的重要手段。
在优化过程中,可以从以下几个方面进行改进:首先,可以优化加工工艺和刀具选择。
通过合理选择加工工艺和刀具,可以降低切削力和热变形,提高加工精度和表面质量。
龙门加工中心横梁组件静动态分析及结构改进

为横 梁 组 件 结 构 设 计 提 供 了 理 论 依 据 。
关键 词 : 龙 门加 工 中心 ; 横 梁组件 ; 有 限元 分析 ; 结 构改进
Abs t r a c t :To i mp r o v e t h e s t a t i c a n d d y n a mi c c h a r a c t e r i s t i c s o f g a n t r y m a c hi ni ng c e n t e r d e f o r ma t i o n
me n t o n t h e c r o s s b e a m a n d u s e t h e in f i t e e l e me n t a n a l y s i s . Th e r e s u l t s s h o w t h a t t h e mo d i ie f d c r o s s be a m
中图分 类号 : T G 5 0 2 文献 标 识码 : A
Fi ni t e El e me nt Ana l y s i s a nd St r uc t ur e I m pr o v e me n t o f Ga n t r y Ma c h i ni n g Ce n t e r Cr o s s b e a m Co m po ne nt
c o m po n e n t s d e f o r ma t i o n d e c r e a s e d b y 7 . 6% ,f ir s t s t a g e m od a l re f q u e n c y i n c r e a s e d by 1 7 . 2% ,t h e s t r u c —
高架桥式五坐标龙门加工中心整机动特性分析

高架桥式五坐标龙门加工中心整机动特性分析东南大学机械工程系 (210096) 倪向阳 张建润江苏多棱数控机床有限公司 (213012) 彭 文摘 要 基于试验识别机床各结合面参数,本文建立了机床整机有限元模型,并进行了静态、动态和谐响应分析,在此基础上找出机床结构的薄弱环节,为机床结构优化设计提供技术支持。
关键词 有限元建模 有限元分析 模态分析 谐响应分析 结合面 在有关项目支持下东南大学与江苏多棱数控机床有限公司合作,开发大型高架桥式五坐标龙门加工中心,机床结构示意图如图1所示。
它主要用于航空航天工业中大型铝合金构件和复杂模具的高速、高效、高精度切削加工。
为保证该机床具有良好的动、静态特性,在设计阶段进行整机和零部件的动力学建模与动、静态特性分析,以确保机床具有良好的动态特性和优良的加工性能。
1.立柱;2.滑座;3.滑台;4.横梁;5.拖板;6.箱体;7.轴;8.电主轴架;9.电主轴图1 机床结构示意图对于这种大型机床的复杂结构,由于零部件装配结合面参数的不确定性,直接建立能描述结构动、静态特性的准确有限元模型是十分困难的[1]。
本文通过试验测试的方法识别出机床主要结合面参数,并应用到整机有限元建模中,得到了较准确的机床整机有限元模型,在此基础上进行机床动、静态特性分析,得到了可靠的分析结果[2][3]。
1 结合面参数识别与整机有限元建模1.1 结合面参数识别机床结合面是影响整个机床动、静态特性的关键,因此整机建模时结合面的参数正确与否,对整机有限元模型的建模精度具有举足轻重的作用。
本文针对影响整机建模精度的关键结合面———导轨副进行动态试验,识别出导轨结合面参数,把这些参数应用于整机建模,以确保整机的建模精度。
图2所示为测试系统示意图:测试时将滑台置于滑座上,由于滑座的质量远大于滑台质量,且滑座与滑台的刚度相对结合面刚度大得多,因此滑座与滑台系统可以近似为单自由度系统。
系统在各方向产生第一阶模态将由导轨结合面相应方向刚度单独决定,因此可以采用分量分析法来识别出该结合面参数[4]。
高速龙门五轴加工中心静刚度分析与结构优化_李焱

方向的力的 作 用,这 两 种 结 合 部 采 用 节 点 耦 合 的 接 触单元模拟; 螺栓连接的结合部全部采用接触单元 模拟。所有 接 触 单 元 接 触 刚 度、阻 尼 和 摩 擦 系 数 等 参数均依据公司参数库查询得到。
2 整机静力学分析
对于高速龙门五轴加工中心这样的大型机床, 在计算静力 变 形 时,不 能 忽 视 它 本 身 的 重 力 对 机 床 的变形和加工的影响。根据机床的结构可知当滑枕 沿机床 Z 坐标方向移动到最下端时,滑枕的伸出量 最长,此时的变形最大,所以整机的静力学分析将选 择此时机床的位姿来计算。首先计算机床在重力作 用下的变形情况,计算结果如图 3 所示,机床的最大 变形为 0. 34mm。将总变形分解到各个部件,结果如 图 4 所示,从计算的结果可以看出横梁的变形最大, 为 0. 13mm,为机床的薄弱环节,其引起的机床变形 占总变形的 38% ,主要原因是横梁在重力作用下发 生 YZ 平面的弯曲和 XZ 平面的扭转,带动主轴偏离 理想位置。
图 2 主机系统的网格划分模型
1. 3 结合面的处理
机床相邻部件间相互接触的区域称为结合部, 对机床整 机 特 性 有 重 要 影 响。 有 统 计 显 示,机 床 整 机静 刚 度 中 30% ~ 50% 取 决 于 结 合 部 的 刚 度 特 性[2],动柔度有 60% 以上是源自结合部,阻尼值的 90% 以上来源于结合部的阻尼[3]。因此,结合部的 建模是机床整机有限元建模的重要组成部分。机床 中主要的结合部包括直线电机初级-次级结合部、直 线滚动导轨滑块-轨道结合部、滚珠丝杠丝母-丝杠结 合部和螺栓连接的固定结合部。直线电机推动力很 大,初级相对次级运动时几乎没有弹性,在直线电机 运动方向上施加位移约束方程; 滑块可沿导轨运动, 在两个方向 上 承 受 力 的 作 用,滚 珠 丝 杠 只 承 受 轴 线
探究龙门起重机结构动态优化设计

探究龙门起重机结构动态优化设计针对龙门起重机应用中存在的问题,比如结构振动剧烈问题、吊载运行稳定性差问题,进行动态分析,探索龙门起重机作业过程中出现运行问题的原因,并且针对不同类型的起重机提出了相应的优化改进方案。
对龙门起重机结构动态设计进行优化,以满足整机重量最小需求,以及满足模态固有频率条件等,作为优化目标,对其结构参数进行优化设计。
标签:龙门起重机;结构参数;结构动态;优化设计起重机属于大型运输机械,能够在复杂情况作业。
其龙门起重机自身的结构特性以及动态特性等,对龙门起重机的使用性能,有着较大的影响。
传统的起重机结构设计,主要依靠人工设计,结合传统经验等方法,具有较大的局限性。
随着起重机设计技术的发展,使得动态工作情况被人们重视与思考,并且对龙门起重机结构进行动态优化设计。
1 龙门起重机结构概述龙门起重机结构较为简单,例如图1,其为JQ50型号的龙门起重机结构示意图。
主要包括下横梁与端梁、柔性支腿与刚性支腿、主梁与门框等。
现代龙门起重机,多采取静态设计+动态补偿设计的方法,除了考虑静态时的工作载荷外,还考虑动态载荷,采取添加安全系数的方式进行补偿,以此简化结构动态设计,以此确保龙门起重机结构设计,能够满足静强度与静刚度的需求,但是因为缺乏动态特性分析,难以估计龙门起重机动态作业时的稳定性,进而极易引发作业问题,包括整机结构振动强烈以及运行不稳定等问题。
龙门起重机的稳定性与刚度,与其金属结构的承受能力,有着直接的关系,进而使得动应力与动刚度等问题更加严重。
当弯曲动刚度超出标准,则极易造成整机结构振动问题,而动应力超出标准,极易造成结构变形或者损伤问题。
当跨中动移位超标时,则会造成整机结构失稳。
2 龙门起重机结构动态分析2.1 基于Ansys动态分析理论基础龙门起重机作业时的动态问题,其属于有限个自由度弹性系统运动范畴。
龙门起重机的模态分析,主要目的是明确龙门起重机结构的振动特性,包括固有频率与振形,该数据信息可以在龙门起重机结构无阻尼自由振动条件下获取。
加工中心主轴箱的静动态特性分析及结构优化

加工中心主轴箱的静动态特性分析及结构优化
何全文;刘刚;邱小华;庄凯;何光春
【期刊名称】《机械研究与应用》
【年(卷),期】2024(37)2
【摘要】为进一步提高数控机床的加工性能,对某企业设计的立式加工中心主轴箱进行静动态特性分析,根据有限元分析结果对主轴箱原有结构进行优化设计,以主轴箱的动态刚度和质量为优化目标,采用响应面法对主轴箱加强筋板的尺寸和位置进行优化,并对优化后的主轴箱结构进行再一次的静动态分析,以检验其机械结构刚度是否得到加强。
分析结果表明,优化后主轴箱的机械结构刚度比优化前有较小改善,说明主轴箱的初始结构设计较为合理,为企业实际生产奠定理论基础。
所研究的分析方法为相关企业同类产品开发提供技术支持。
【总页数】4页(P38-41)
【作者】何全文;刘刚;邱小华;庄凯;何光春
【作者单位】西南交通大学机械工程学院;四川工商职业技术学院智能制造与信息工程学院;株洲欧科亿数控精密刀具股份有限公司
【正文语种】中文
【中图分类】TH122;TG659
【相关文献】
1.TH6350卧式加工中心主轴箱系统有限元建模及动态特性分析
2.龙门加工中心动态特性的有限元模态分析与结构优化
3.立式加工中心工作台系统的动态特性分析
及结构优化4.基于动态精度的直驱型高速机床主轴箱静动态特性分析5.立式加工中心主轴箱静动态特性分析及拓扑优化
因版权原因,仅展示原文概要,查看原文内容请购买。
龙门加工中心整机动静态分析及结构优化

由分析结果发现, 滑枕的静强度与动态性能都较 好, 但根据加工中心整体结构, 可发现其存在结构过长 的现象, 这一设计既增加了自身质量, 缩短了行程, 又加 剧了刀尖变形趋势。滑枕结构改进前后对比如图 6所 示。修改前后行程增加 2 9 0m m , 质量减轻 1 2 6k g 。
由表 3可知, 该龙门加工中心的前两阶固有频率偏 低, 只有 3 0 1 7 7H z 和3 2 5 1 5H z , 动态特性较差。4 、 5 、 6 阶有密频现象。 结合前面静力分析的结果可知: 横梁、 滑枕是其较 为薄弱环节。这是由于该加工中心横梁 x 向的刚度低 以及滑枕长度过长, 造成整机低阶固有频率偏低及总位 移量较大。
2 有限元模型建立
静力学分析中, 网格划分采用 A N S Y SWo r k b e n c h三 维实体单元 S o l i d 1 8 6 , 该单元为三维 6面体 2 0节点的结
收稿日期: 2 0 1 4 0 5 1 1 基金项目: 人工智能四川省重点实验室科研项目( 2 0 1 3 R Y Y 0 3 ) ; 四川省教育厅重点项目( 1 4 Z A 0 2 0 9 ) ; 自贡市科技局项目( 2 0 1 3 J 1 9 ) 作者简介: 杨海栗( 1 9 8 8 ) , 女, 四川成都人, 助教, 硕士, 主要从事结构设计及 C A E仿真分析研究, ( E m a i l ) y h l s e a 3 2 4 @1 6 3 . c o m
龙门加工中心整机动静态分析及结构优化
杨海栗,田建平,胡 勇,付 磊,黄丹平
( 四川理工学院机械工程学院,四川 自贡 6 4 3 0 0 0 )
摘 要: 以S o l i d Wo r k s 三维建模软件与 A N S Y SWo r k b e n c h 有限元分析软件为平台, 建立龙门加工中 心整机动静态分析模型, 由分析得到整机在只受重力、 以及重力与切削力同时作用这两种工况下的位移 量数据及其相对变化量, 得出整机的结构刚性及固有频率值, 并综合分析结果提出滑枕及横梁的结构优 化方案, 通过结构改进减小整机变形量, 提高整机加工精度, 为加工时的误差补偿提供了理论依据。 关键词: 龙门加工中心; 整机; 静力特性; 动力特性; 结构优化 中图分类号: T P 3 9 1 文献标志码: A 及整机可靠性, 并针对薄弱环节进行结构优化, 从而提 高整机加工精度, 并为加工时的误差补偿提供必要的理 论依据。
龙门式起重机的结构设计与性能优化分析
龙门式起重机的结构设计与性能优化分析龙门式起重机是一种常见的大型起重设备,广泛应用于港口、工地、仓库等场所。
在结构设计和性能优化方面,龙门式起重机需要综合考虑其承载能力、稳定性、工作效率和安全性等因素。
一、结构设计1. 主梁设计:主梁是龙门式起重机的主要承载结构,需要按照所需的起重能力和跨度进行合理设计。
主梁材料通常选择钢结构,高强度、刚性好,能够满足起重机的工作要求。
2. 支腿设计:龙门式起重机通常有两根支腿,支腿的设计需要考虑平衡起重机的重心,稳定机身。
支腿通常采用跨字式结构,可以提供更好的稳定性。
3. 提升机构设计:提升机构是起重机的核心部分,需要具备良好的承载能力和操作灵活性。
提升机构包括卷扬机、钢丝绳、滑轮等组成,能够提供可靠的起升功能。
4. 小车设计:小车是起重机上横移的装置,通常由电动机、行走轮、驱动机构等组成。
小车设计应考虑平稳移动、灵活操作和较大的承载能力。
二、性能优化分析1. 结构强度优化:通过材料选取和结构设计优化,提高起重机的结构强度和刚度,使其能够承受更大的起重能力和外力冲击。
2. 运动性能优化:通过优化起重机的运动机构,减小摩擦力和阻力,提高起重机的运动速度和精度,提高工作效率。
3. 能耗优化:采用先进的节能技术,如变频调速技术和能量回收技术,减少起重机的能耗,降低运营成本。
4. 安全性优化:加强起重机的安全保护装置,如限位器、断路器、防碰撞装置等,确保起重过程中的安全性。
5. 自动化控制优化:应用自动化控制系统,提高起重机的智能化水平,实现远程控制和自动化操作,降低人为操作错误的风险。
6. 维护性优化:设计起重机时,考虑易维修性和易保养性,减少故障发生的可能性,并方便维修和维护工作的进行。
结构设计和性能优化是龙门式起重机研发过程中重要的一环。
通过合理的结构设计和性能优化,可以提升起重机的承载能力、工作效率和安全性,满足不同场所的具体需求。
同时,结构设计和性能优化也应考虑可持续性发展的原则,采用环保和节能的设计理念,为工业发展和环境保护做出贡献。
数控机床主轴静动态特性分析与优化设计

数控机床主轴静动态特性分析与优化设计数控机床主轴的静动态特性分析与优化设计在机床设计中扮演着重要的角色。
主轴的质量、刚度和动力性能直接影响着数控机床的加工精度和生产效率。
因此,针对数控机床主轴的静动态特性进行分析和优化设计是非常必要的。
首先,对数控机床主轴的静态特性进行分析是基础。
静态特性主要包括主轴的刚度、负载能力和转速范围。
刚度是指主轴在受力时的变形能力,直接影响着机床的切削精度。
负载能力指主轴能够承受的最大切削力或轴向力,取决于主轴的结构和材料。
转速范围则指主轴的最大和最小可工作转速,根据机床加工要求和主轴的功率决定。
其次,对数控机床主轴的动态特性进行分析是优化设计的重要环节。
动态特性主要包括主轴的运行平稳性、动态刚度和各模态的特性频率。
运行平稳性是指主轴在工作状态下的振动情况,对加工表面质量和刀具寿命有重要影响。
动态刚度是指主轴在受力时的变形能力在一定频率下的响应能力。
各模态的特性频率则表征着主轴在不同振动模态下的响应频率和振动幅度。
针对数控机床主轴的静动态特性,可以采取以下优化设计措施。
首先是通过优选材料和适当加工工艺来提高主轴的刚度和负载能力。
其次是采用适当的轴承和润滑方式,减小主轴的摩擦和磨损,提高运行平稳性。
此外,还可以通过调整主轴的结构和参数来提高动态刚度和各模态的特性频率。
例如,增加主轴的直径、改变轴承支撑形式等。
在数控机床主轴静动态特性优化设计过程中,还需要考虑与其他系统和结构的配合,如主轴驱动装置、刀具系统等。
同时,结合实际工艺要求和机床制造能力,进行多种参数的优化设计,以实现最佳的综合性能。
总之,数控机床主轴的静动态特性分析与优化设计是非常重要的工作,直接关系到数控机床的加工质量和生产效率。
通过对主轴材料、结构和参数的优化设计,可以提高数控机床主轴的静态刚度、负载能力和动态性能,进而提高数控机床的加工精度和生产效率。
龙门式机械手的动静特性及结构优化

2018年5月第46卷第9期机床与液压MACHINETOOL&HYDRAULICSMay2018Vol 46No 9DOI:10.3969/j issn 1001-3881 2018 09 015收稿日期:2016-11-08作者简介:谢嘉亮(1992 ),男,硕士,主要从事机械设计及其自动化方向㊂E-mail:327623052@qq com㊂龙门式机械手的动静特性及结构优化谢嘉亮,张春良,朱建国,林贺邦,燕科帆,孔令倩(广州大学机械与电气工程学院,广东广州510006)摘要:龙门式机械手结构设计多采用对己有的设计图纸修改的方法进行,导致设计出的结构的安全裕度过大,既浪费材料,又增加了整机的质量㊂运用ANSYS有限元分析软件,选取机架在最不稳定工况下研究了结构的静㊁动态特性,运用灵敏度方法对结构系统的设计变量进行计算,筛选出了对龙门式机械手的动静态性能影响较大的设计变量并对其进行尺寸优化㊂对比优化前后的具体参数,得出了机械手在优化后性能有了一定的提升㊂关键词:龙门式机械手;静态分析;模态分析;优化中图分类号:TP241 2㊀㊀文献标志码:A㊀㊀文章编号:1001-3881(2018)09-065-6DynamicandStaticCharacteristicsofGantryManipulatorandItsStructuralOptimizationXIEJialiang,ZHANGChunliang,ZHUJianguo,LINHebang,YANKefan,KONGLingqian(MechanicalandElectricalEngineeringCollege,GuangzhouUniversity,GuangzhouGuangdong510006,China)Abstract:Thestructuraldesignofthegantrymanipulatorismostlymodifiedbytheexistingdesigndrawings,whichleadstothedesignofthestructureofthesafetymarginistoolarge,bothawasteofmaterials,andincreasethequalityofthemachine.ANSYSfi⁃niteelementanalysis(FEA)softwareisusedtoselectstaticanddynamiccharacteristicsoftheframeunderthemostunstablecondi⁃tions.Thesensitivityofthestructuralsystemwasusedtocalculatethedesignvariables,andthedesignvariableswhichhadacertainimpactonstaticanddynamicperformanceofthegantrymanipulatorwerescreenedandoptimizedforsize.Comparedwiththespecificparametersbeforeandafteroptimization,theoptimalperformanceofthemanipulatorhasbeenimproved.Keywords:Gantrytypemanipulator;Staticanalysis;Modalanalysis;Optimization0㊀前言随着劳动力成本的不断上升,工业自动化设备在很多领域正越来越多地被广泛使用,其中工业机械手凭借其稳定性好㊁适应面广㊁效率高等优点,成为工业自动化生产的理想工具㊂与人相比,机械手可以在有毒㊁有害㊁危险的环境下连续工作,比如焊接㊁喷漆等;也可以完成频繁㊁单调㊁重复的劳动,比如上下料㊁搬运等[1-2]㊂龙门式工业机械手是当前国内外工业生产中大量使用的一种自动化设备,其总体结构如图1所示㊂但其结构设计多采用经验和对己有的设计图纸修改的方法进行,这将导致生产出来的整机安全系数太大,最终浪费了大量材料,以及提高了制造成本㊂因此,如何在确保安全性能的前提下,设计出整体性能较高的机械手,是一个值得深入研究的重要课题㊂本文作者采用SolidWorks软件建立了机架的几何模型,将其导入ANSYSWorkbench中,在最不稳定工况下进行动㊁静态分析,根据机械手动态性能影响最大的固有频率运用灵敏度方法对结构系统的设计变量进行计算,对机械手机构进行优化[3]㊂1㊀静态分析龙门式工业机械手的几何简化模型如图2所示㊂因上料过程中机械手在Y轴横梁上有很多种不同的工况,现只对应力值和位移值最大的工况进行分析,即为理论上结构最不稳定的状态㊂由材料力学知识可知,当升降机构处于横梁中心时,其应力值和位移值均达到最大,故选取该工况为机械手上料过程中机架的最不稳定工况[4-5]㊂图1㊀龙门式机械手结构简图图2㊀龙门式机械手的几何简化模型将建好的三维模型导入ANSYSWorkbench后,为了尽量减小在网格划分中有限元计算的难度和计算时间,将三维模型中的倒角㊁螺纹等不重要特征省略,另外省略了对整个模型结构的动静态性能分析结果影响不大,且不属于文中所关心的结构范围之内的驱动电机㊁拖链㊁托板等辅助元件,并将螺栓连接简化成刚性连接[6]㊂在材料的使用方面,支撑立柱所使用的材料为Q235,X轴横梁及Y轴纵梁使用的材料为45号钢,Z轴竖梁为铝合金LY12㊂其具体的材料参数如表1所示㊂建立好的有限元模型如图3所示㊂表1㊀材料特性材料密度/(kg㊃m-3)弹性模数/(10-4MPa)泊松比体积弹性模量/(1010MPa)剪切模量/(1010MPa)屈服强度/MPa正切模量/MPa45钢789020.90.26915.0798.2348355600Q235钢786021.20.28816.668.2298235390LY12铝合金28507.420.368.83332.7279275425图3㊀龙门式机械手的有限元模型龙门式机械手在进行板材搬运作业时,外部载荷主要为板材和真空吸附抓取机构的质量载荷(预估为700N)㊂在ANSYS中,载荷施加将其以Force作用力的方式加载在Z轴竖梁的最下端,边界条件在3个立柱的底面添加Fixed约束㊂其应力图和位移图如图4㊁5所示㊂图4㊀等效应力云图图5㊀位移形变云图由图4㊁5可知,在极限工况时最大应力值约为2 2186MPa,远低于所用材料的屈服强度,最大位移值约为0 136mm,对线性滑轨和齿轮齿条影响很小,因此龙门式机械手的静刚度和静强度均符合要求,且所用材料的使用余量较大㊂同时该工况为理论上最不稳定的工况,故机械手在其他任何位置时,机架的应力值和位移值都将分别小于2 2186MPa和0 136mm㊂2 动态分析2 1㊀模态分析模态参数(固有频率和振型)是承受动态载荷结构设计中的主要参数,其反映了机械系统的动态性能㊂从理论上对结构最不稳定状态下的模型进行模态分析,并描述了各个振型及其可能产生的原因,为龙门式机械手的进一步的谐响应分析和系统的优化设计提供重要的模态参数㊂㊃66㊃机床与液压第46卷因模态分析只与结构的形状㊁约束形式㊁材料特性等有关,而与其他输入(例如载荷)无关,所以只需要对龙门式机械手的3个支撑立柱的底面添加固定约束(即FixSupport),得出结构系统的固有频率和振型㊂由于在结构振动中,在低频下产生的加速度比较小,所以惯性力的影响也比较小,此时外力占主导因素,结构的最大变形取决于外力幅值和结构刚度㊂而在高频情况下,加速度变大,惯性力的影响上升为主导因素,在外力快速变化时,结构来不及变形,或跟不上外力的变化速度,这时变形就不如低频时的大,故高阶模态对振动特性的影响很小,低阶模态更能准确反映系统自由振动时的变形情况㊂因此文中提取了机架的前6阶模态,得到了机架的前6阶固有频率,并得到了前6阶模态振型图,如图6所示㊂图6㊀龙门式机械手前6阶模态振型图㊀㊀利用ANSYS求解出结构的前6阶模态振型图后,从得到的振型图中可归纳出表2中的内容㊂第1阶固有振型反映了龙门式机械手的X轴纵向水平振动;第2阶固有振型反映了龙门式机械手的Y轴横向水平振动,可由滑台总成水平启动㊁制动等原因激励起振;第3㊁5㊁6阶固有振型反映了龙门式机械手的扭转振动;第4阶固有振型反映了龙门式机械手的Z轴垂直振动,可由垂直起升机构启动㊁制动㊃76㊃第9期谢嘉亮等:龙门式机械手的动静特性及结构优化㊀㊀㊀等原因激励起振㊂表2㊀龙门式机械手前6阶模态振型描述阶数固有频率/Hz振型描述127.243沿X轴左右摆动230.718沿Y轴前后摆动339.074在XOY平面内扭动447.33沿Z轴上下摆动554.492在XOZ平面内扭动662.027在YOZ平面内扭动2 2㊀谐响应分析为了解各阶固有频率对机械结构动载荷的响应情况,有必要对起重上料机结构系统进行谐响应分析㊂将模态分析与谐响应分析相结合,确定对龙门式机械手结构系统动态性能影响最大的模态频率㊂谐响应分析过程中,需要设置用于分析的最小频率和最大频率㊂因高阶模态在结构阻尼的作用下衰减很快,所以文中只考虑了0 63Hz频率范围内的低阶模态的结构响应情况㊂图7为龙门式机械手跨中节点垂直位移响应曲线㊂图7㊀龙门式机械手跨中节点位移响应曲线从图7中可看出,在不同激振频率的作用下:垂直位移响应最大峰值约为3 13mm,对应的频率约为47 5Hz㊂将这个频率与模态分析的前6阶固有频率值进行对比,得出龙门式机械手跨中节点位移出现峰值时的频率与模态分析中的第4阶固有频率(f4=47 33Hz)非常靠近,误差约为0 36%,故第4阶固有频率易引起龙门式机械手的模态共振,它对龙门式机械手结构的动态性能影响最大,故选取第4阶的频率作为动态优化设计的目标或状态变量[7]㊂3 结构优化设计基于灵敏度分析的优化方法是结构优化设计中最常用的方法,是指在一个系统中改变一个或多个设计变量后对其某个系统参数的敏感程度或变化率㊂灵敏度分析能正确有效地指出结构的动态薄弱部位及修改方向,方便设计人员选择最有效的修改方案[8]㊂选取龙门式机械手的3根支撑立柱㊁X轴横梁㊁Y轴纵梁,Z轴竖梁作为研究对象进行尺寸优化㊂在灵敏度分析中,把研究对象截面的长度㊁高度和厚度定为初始设计变量,它们的截面均可看成是由4块矩形板件焊接组成的 口 字形形状㊂如果4块矩形板件的尺寸都取相同的数值,并进行力学效能分析,从中可以看出4块矩形板件的效能将有所差异,设计人员通常参考力学效能最差的一块板件的尺寸,这样就导致其他3块板件在结构性能上的 浪费 ,因此文中选取两个平行矩形板件的长度㊁高度和厚度作为初始设计变量,如图8所示,这种方法能较好地满足其性能要求,并且控制部件的整体质量不至于过大㊂所有长度㊁高度和厚度尺寸的具体位置如图9所示,考察整体质量㊁4阶固有频率对所有长度㊁高度和厚度尺寸的灵敏度分析㊂图8㊀一个部件中初始设计变量的选取图9㊀所有初始设计变量在龙门式机械手中的分布通过利用利用有限元分析软件ANSYS优化模块中的ParametersCorrelation(参数相关性优化分析工具)方法,计算得出各个设计变量对整机总质量和第4阶固有频率的灵敏度如表3和表4所示:表3㊀设计变量对整机总质量的灵敏度表设计变量质量灵敏度/(kg㊃mm-1)设计变量质量灵敏度/(kg㊃mm-1)DH10DV11-0.069474947DH20DV12-0.029858986DV3-0.013609361DH13-0.029174917DV40.083420342DH14-0.066426643DH50.071167117DV15-0.004572457DH6-0.025118512DV160.066258626DV70.027854785DH17-0.03589559DV8-0.010609061DH18-0.03979598DH9-0.137281728DV190.08380438DH10-0.021782178DV20-0.174485449㊃86㊃机床与液压第46卷表4㊀设计变量对第4阶固有频率的灵敏度设计变量第4阶固有频率灵敏度/(Hz㊃mm-1)设计变量第4阶固有频率灵敏度/(Hz㊃mm-1)DH10DV11-0.011965197DH20DV12-0.053861386DV30.06850285DH13-0.058541854DV4-0.195379538DH14-0.021674167DH50.039339934DV150.08380438DH60.086168617DV16-0.090885089DV70.100642064DH170.017221722DV80.018805881DH18-0.092661266DH9-0.061170117DV190.014017402DH10-0.163576358DV20-0.210369037㊀㊀灵敏度为正值时,表示目标函数与设计变量成正比,其随设计变量的增大而增大;灵敏度为负值时,则表示目标函数与设计变量成反比,其随设计变量的增大而减小㊂为了提高龙门式机械手结构系统动态优化的效率,应选取在不同目标函数下计算所得的灵敏度值(绝对值)较大的参数作为设计变量㊂从表3的数据可以看出,DV4㊁DH5㊁DH9㊁DV11㊁DH14㊁DV16㊁DV19这7个尺寸对整机质量的影响较大,其他的尺寸对整机质量的影响较小;从表4的数据可以看出,DV3㊁DV4㊁DH6㊁DV7㊁DH9㊁DH10㊁DV12㊁DH13㊁DV15㊁DV16㊁DH18㊁DV20这12个尺寸,对4阶固有频率的影响较大,其他的尺寸对4阶固有频率的影响较小,对结构的动态特性的提升程度不大㊂综上分析可得出结论:将DV3㊁DV4㊁DH5㊁DH6㊁DV7㊁DH9㊁DH10㊁DV11㊁DV12㊁DH13㊁DH14㊁DV15㊁DV16㊁DH18㊁DV19㊁DV20这16个尺寸定为尺寸优化的设计变量㊂利用有限元分析软件ANSYS中的ResponseSur⁃faceOptimation模块,采用筛选方法(SceneingMeth⁃od),本次设置采样数目为1000,通过对这1000个采样数进行计算,将产生3个候选优化值1㊁2㊁3,优化值如表5所示㊂优化值1㊁2㊁3的选取优先级逐次降低,所以选择优先级最高的优化值1来进行优化计算㊂表5㊀候选优化值设计变量优化值1优化值2优化值3设计变量优化值1优化值2优化值3DV3108.6929.556DV126.63935.174112.155DV423.08992.4337DH13127.34137.3107.81DH5193.64196.8198.45DH14188.79236.14205.58DH6178.91130.64194DV156.807614.9539.8333DV75.03359.386513.935DV1611.39511.11210.323DH9197.99108.77189.01DH188.80449.02645.3857DH10158.46138.1165.96DV197.88069.526414.653DV1112.7697.292810.444DV20109.03179.54109.47㊀㊀优化后的设计变量是一组离散的数据,需要根据灵敏度值的正负,经过人工圆整后,获得比较满意的尺寸㊂龙门式机械手各设计变量优化前后比较见表6㊂表6㊀优化前后各设计变量数据对比设计变量初值/mm优化圆整值/mm设计变量初值/mm优化圆整值/mmDV3510.0DV12106.5DV452.0DH13150127.0DH5150193.5DH14200189.0DH6150179.0DV15107.0DV7105.0DV161011.5DH9150198.0DH18109.0DH10150158.5DV19108.0DV111013.0DV20150109.0㊀㊀用优化圆整后的设计变量对龙门式机械手进行重新建模,并再次进行静㊁动态分析,分析结果与优化前数据比较见表7,8㊂表7㊀优化前后前6阶主要评价参数对比项目f1f2f3f4f5f6原设计/Hz27.24330.71839.07447.3354.49262.027优化后/Hz30.45133.71343.08749.69557.93363.486变化率/%11.89.7510.356.312.35表8㊀优化前后各结构主要评价参数对比项目σLmax/MPayLmax/mmλmax/mmW0/kg原设计2.21860.136360.13738608优化后2.26080.156830.15594574变化率/%1.91513.51-5.59㊀㊀龙门式机械手结构系统优化后等效应力云图㊁位移变形云图㊁第4阶振型㊁Y轴跨中节点的位移响应曲线如图10 12㊂图10㊀优化后等效应力云图㊃96㊃第9期谢嘉亮等:龙门式机械手的动静特性及结构优化㊀㊀㊀图11㊀优化后位移变形云图图12㊀优化后的第4阶模态振型通过对动态优化后的龙门式机械手的静㊁动态进行分析,可得到如下结论:由图10可以看出龙门式机械手的最大等效应力为2 2608MPa,比原设计增加了1 9%,但仍远低于材料的许用应力,所以优化后结构的静强度满足要求㊂由图11可以看出龙门式机械手的最大变形位移为0 15683mm,比原设计增加了15%,但仍小于设计要求规定的许用位移变形,所以优化后结构的静刚度满足要求㊂由表7可以看出,结构各阶模态的固有频率数值均不低于原先的固有频率㊂对龙门式机械手动态性能影响最大的第4阶模态频率为f4=49 695Hz,比原设计提高了5%,提高较明显,并且第3㊁5阶模态频率均不靠近谐响应分析中对应的频率47 5Hz,故此动刚度值比较合适㊂由表8可以看出,结构质量减轻了34kg,降幅达5 59%,经济性能明显提高㊂龙门式机械手跨中节点的最大动位移为0 15594mm,比原设计有所增大,但仍小于设计许用值㊂4㊀结论运用ANSYS有限元分析软件研究了龙门式机械手结构的静㊁动态特性;通过优化研究对象的截面的设计变量进行灵敏度分析,筛选出了对龙门式机械手的动静态性能影响较大的设计变量,并对其进行尺寸优化,实现了从有限元建模,静㊁动态分析㊁优化设计的较完整的设计流程㊂运用灵敏度方法对结构系统的设计变量进行计算,选取了16个对系统影响较大的设计变量㊂运用优化模块对16个设计变量进行优化,用优化圆整后的设计变量对龙门式机械手进行重新建模,并再次进行静㊁动态分析,获得了对实际设计具有一定参考意义的优化结果㊂但是,由于有限元软件在计算功能上的局限性以及龙门式机械手动态特性和起升运动过程的复杂性,因此未来在还需在瞬态动力学方面继续深入㊂参考文献:[1]何兰.工业机械手研究及应用[J].电子世界,2013(23):167-168.[2]张海英,刘胜明.基于PLC的气动吸盘式工业机械手设计[J].机械工程师,2010(11):32-33.ZHANGHY,LIUSM.DesignofPneumaticManipulatorBasedonPLC[J].MechanicalEngineer,2010(11):32-33.[3]DAVIDH.ThePossibilitiesofOverheadCraneModerniza⁃tion[J].MetalProducingandProcessing,2004,42(6):29-30.[4]谢占功,朱建国,陈贤帅,等.龙门式机械手关键零件的动静态特性及接触分析[J].机电工程技术,2016,45(3):72-76.XIEZG,ZHUJG,CHENXS,etal.CantryManipilatorDynamicandStaticCharacteristicsandContactAnalysisofKeyParts[J].Mechanical&ElectricalEngineeringTech⁃nology,2016,45(3):72-76.[5]于锋钊,赵明扬,辛立明,等.基于ANSYS的龙门式直角坐标机器人横梁分析[J].机械设计与制造,2008,46(5):182-183.YUFZ,ZHAOMY,XINLM,etal.AnalysisonBeamoftheProtal⁃typeCarteSian⁃coordinateRobotBasedonAN⁃SYS[J].MachineryDesign&Manufacture,2008,46(5):182-183.[6]宋婷婷.桥式起重机桥架的有限元模型及动态特性分析[D].昆明:昆明理工大学,2012.[7]陈非琛.龙门式机械手动静态特性分析及结构优化[D].长沙:湖南大学,2014.[8]陈敏,缪冬生,陈惇,等.一种新型滚动丝杆螺母副的研究与应用[J].机械传动,2009,33(4):103-105.(责任编辑:卢文辉)㊃07㊃机床与液压第46卷。
龙门加工中心立柱静力学分析与结构优化设计方法

龙门加工中心立柱静力学分析与结构优化设计方法丁长春;殷国富;方辉;徐德炜【摘要】Solidworks 3D design and ansys softwares are adopted to make 3D model and steatic analysis of the column of the Gantry machinze. Tle deformation stress and strain of the column are given under the gravity and cutting force. Then.the suggestion of improvement of the column is advanced. The static mechamical performance is improved greotly and the stress is redfuced greatly.It is the basis to improre the precision of he Gantry machine.%集成应用solidworks三维软件和ansys有限元分析软件,建立了大型龙门加工中心立柱的三维模型和静力学分析模型,通过有限元计算得到了立柱在重力和切削力作用下的变形、应力和应变分布,根据相应分析结果提出了机构优化方案,改善了该型龙门加工中心立柱的静态力学性能,为提高该型加工中心的加工精度稳定性提供了技术手段支持.【期刊名称】《机械设计与制造》【年(卷),期】2011(000)003【总页数】2页(P3-4)【关键词】立柱;静力分析;变形量;优化设计【作者】丁长春;殷国富;方辉;徐德炜【作者单位】四川大学,制造科学与工程学院,成都,610065;四川大学,制造科学与工程学院,成都,610065;四川大学,制造科学与工程学院,成都,610065;四川长征机床(集团)有限公司,自贡,643020【正文语种】中文【中图分类】TH121 引言龙门加工中心立柱主要用于支承横梁、导轨等部件,是大型龙门加工中心的重要组成部分,它的强度、刚度性能直接影响整机的加工精度、抗振性、切削效率和寿命。
高速龙门五轴加工中心静刚度分析与结构优化

做 z向运动 , 双摆头可 实现 A C轴摆 动 , 足复杂 曲 / 满
面 的 五 轴 联 动 加 工 。 由 于 有 限 元 分 析 软 件 A ss ny 提 供 的 建 模 工 具 相 对 较 弱 , 以 采 用 Po E软 件 先 将 各 所 r/ 部 件 建 立 三维 实 体 模 型 , 装 配 得 到 整 机 模 型 , 减 并 为 少 计算 负荷 , 对模 型 进 行 适 当 简 化 , 掉 螺 钉 、 母 、 去 螺
pr ve n r a a tc o d i e lpr c ie.
K e o ds g n r xs ma hn e tr FEM ;sa i ii i y w r : a ty 5 a i c ie c n e ; t tc rgdt y
0 引 言
高速龙 门五轴 加工 中心 主 要应 用 于复 杂模 具 制 造 以及 大 型铝 合金 结 构件 的高 速 、 效 、 精 加 工 , 高 高
c mp n n s Ac odn ote ea a s s t efal at ta i at h i dt f h oemahn ei o o e t . c r igt h s n l e , h iP rs h t mp c t er i o ewh l y l i g y t c iesr -
A b t a t:S a i ii i s o ft em o ti po t n n ia o sf rm a h n o l ’ pef r a c , n e d sr c t tc rgdt i neo h s m ra tid c t r o c i et o s ro m n e a d n e y t o e a t d i h a e ofd sg o be f rc se n t e ph s e in.I he d sg g pe d 5 a i a ty-ype m a h n e t r n t e i ofa hih s e ・ xs g n r t n c iecn e. sa i f r e a ayss i ro me ih t e h l o t tc o c n l i spef r d w t h ep fFEM s fw a e f r t e c mplt a h n n t an o t r o h o ee m c i e a d ism i
龙门式起重机的结构设计及优化
龙门式起重机的结构设计及优化龙门式起重机是一种常见的工业起重设备,用于在工地、港口、仓库等场所进行货物的运输和搬运。
在这篇文章中,我们将探讨龙门式起重机的结构设计和优化,并介绍一些可以提高其性能和效率的方法。
1. 结构设计龙门式起重机的结构设计需要考虑以下几个关键因素:1.1 主梁设计:主梁是起重机结构的主要承重部分,其设计需要考虑强度、刚度和稳定性。
一般情况下,主梁采用箱梁结构,具有较高的强度和刚度。
此外,还可以采用杀伤性钢板焊接工艺,提高主梁的承载能力。
1.2 支撑结构设计:为了保证起重机的稳定性,在龙门式起重机的两侧设置支撑腿是必要的。
支撑腿的设计需要考虑均匀分布荷载、防止倾覆和减小地面压力等因素。
1.3 起重机车架设计:起重机车架是起重机移动和行走的基础部分,一般采用轮式或履带式结构。
在设计中,需要确保车架具有足够的强度和刚度,以满足起重机的工作需求。
1.4 提升机构设计:提升机构是起重机的核心部分,包括起重钩、卷筒、齿轮传动装置等。
设计时需要考虑提升机构的稳定性、动力传输和起重能力,以提高起重机的工作效率和安全性。
2. 优化方法为了提高龙门式起重机的性能和效率,可以采用以下一些优化方法:2.1 材料优化:选择适当的材料可以提高起重机的强度和耐久性。
例如,使用高强度钢材可以减少主梁的重量,提高结构的刚度和稳定性。
2.2 结构参数优化:通过对起重机的结构参数进行优化,可以提高其运动性能和负荷能力。
例如,通过调整支撑腿的角度和长度,可以提高起重机的稳定性。
2.3 液压系统优化:液压系统是起重机的重要部分,影响其提升和行走的效率。
通过优化液压系统的工作流程、降低能量损耗和提高控制精度,可以提高起重机的行走速度和提升效率。
2.4 自动化控制优化:采用自动化控制系统可以实现起重机的智能化操作和监控。
通过优化自动化控制系统,可以提高起重机的工作效率、减少人为误操作和增加安全性。
通过以上的结构设计和优化方法,龙门式起重机可以在提升能力、运动性能和工作效率方面得到明显的提升。
龙门式起重机的结构分析及优化设计

龙门式起重机的结构分析及优化设计龙门式起重机是一种常见的起重设备,广泛应用于港口、工地、工厂等场所。
它具有结构简单、起重能力大、操作灵活等特点。
本文将对龙门式起重机的结构进行分析,并提出优化设计的建议。
1. 结构分析龙门式起重机的主要结构包括龙门架、起升机构、行走机构和操作台。
龙门架是起重机的主要支撑结构,承受起重荷载和运行过程中的力。
起升机构用于提升和放下重物,包括起重机构和卷扬机构。
行走机构负责起重机在轨道上的运行,提供移动和定位功能。
操作台上设有操纵杆、按钮等控制装置,用于操作和控制起重机的运行。
在结构分析中,需要考虑以下几个方面:1.1 龙门架的结构龙门架通常采用钢结构,需要具有足够的强度和刚度以承受起重荷载和风荷载。
结构设计应满足龙门架的刚性要求,减小振动和变形。
采用优化设计方法,可以通过优化截面形状和尺寸,减少材料消耗,提高结构的经济性。
1.2 起升机构的设计起升机构的设计应考虑起升的稳定性和安全性。
起重机构的设计要能够满足各项工作条件下的起重要求,并在不同工况下进行负载计算和结构强度验证。
卷扬机构的设计应考虑提升速度、可靠性和安全性,采用先进的传动系统和防护装置。
1.3 行走机构的设计行走机构的设计要满足起重机运行的平稳性和精确性要求。
在设计中需考虑起重机的最大行走速度、行走轮压力分布、减振装置等。
通过先进的控制系统和传感器,可以实现起重机的自动导航和定位功能,提高操作效率和安全性。
2. 优化设计为了进一步提高龙门式起重机的性能和经济性,可以采用以下优化措施:2.1 材料选择在龙门架的设计中,选择合适的材料可以减少结构重量和材料成本。
使用高强度钢材可以提高结构的承载能力,减小截面尺寸,从而减轻自重。
2.2 结构降噪设计在起升机构和行走机构中,结构的振动与噪声会影响操作员的工作环境和设备的可靠性。
通过优化结构设计和添加吸声材料,可以降低噪声和振动,提高操作员的舒适度和设备的使用寿命。
高速龙门加工中心立柱静态设计与动特性分析
高速龙门加工中心立柱静态设计与动特性分析高速龙门加工中心是一种高精密度、高效率的机床设备,其立柱是其结构的关键部件之一。
对于高速龙门加工中心的立柱静态设计及动特性分析,是保障机床精度和稳定性的关键步骤。
首先,要进行立柱的静态设计。
在立柱静态设计的过程中,需要考虑以下因素:1. 应力分析:通过应力分析可以确定立柱的形状和直径,以及立柱材料的选择。
要根据立柱所承受的载荷和工作条件来分析立柱的最大应力和变形程度,以确保其符合国家标准和机床的要求。
2. 刚度分析:在立柱刚度分析中,需要考虑立柱的强度、变形和稳定性。
强度要求立柱能承受最大载荷,变形率要尽可能小,以确保加工精度;稳定性要求在工作条件下的立柱不会产生强度变化和形变。
3. 疲劳寿命:要确定立柱的最大疲劳寿命,以确保机床运行的安全性。
其次,要对立柱的动特性进行分析。
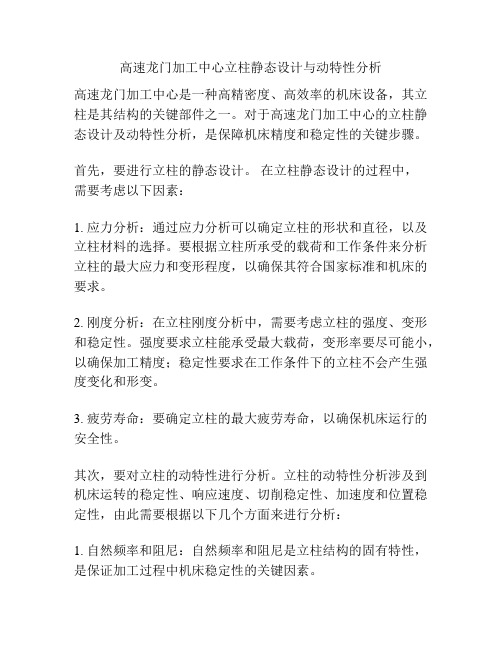
立柱的动特性分析涉及到机床运转的稳定性、响应速度、切削稳定性、加速度和位置稳定性,由此需要根据以下几个方面来进行分析:1. 自然频率和阻尼:自然频率和阻尼是立柱结构的固有特性,是保证加工过程中机床稳定性的关键因素。
2. 模态:通过模态分析可以得到机床载荷、切削力的作用下,立柱在运动过程中的振动特性。
模态分析可以帮助设计师确定在加工过程中如何控制立柱的振动,以保证加工精度和处理工件的质量。
3. 加速度和位置变化:加速度和位置变化是影响机床工作精度的因素之一,对于高速龙门加工中心来说,需要控制立柱的加速度和位置变化,在加工过程中控制立柱的精度和工作效率。
4. 切削力:切削力是机床加工时承受的一种力量,会对立柱产生振动和变形,因此需要对切削力进行分析和控制。
综上所述,高速龙门加工中心立柱的静态设计与动特性分析是保障机床精度和稳定性的重要步骤。
设计师需要根据机床的实际情况进行分析和控制,以满足机床的加工工艺和工艺要求,从而提高机床加工的稳定性和精度。
假设我们需要研究消费者对某种产品的购买意向和市场规模,我们可以收集相关的数据并进行分析。
龙门式起重机的设计与优化分析
龙门式起重机的设计与优化分析龙门式起重机作为一种常见的起重设备,具有广泛的应用领域,包括工业、建筑、港口等行业。
本文将对龙门式起重机的设计与优化进行分析,包括结构设计、工作原理、优化措施等方面。
一、结构设计龙门式起重机主要由龙门桥架、起重机梁、大车、小车、起升机构和电气控制系统等组成。
龙门桥架是起重机的主体结构,承受重物的重量和提升力。
起重机梁则是用来连接龙门桥架和起重机的吊钩,起重机梁的结构设计需考虑材料的抗压强度、刚度和稳定性等因素。
在结构设计方面,首先要确定起重机的承载能力和工作范围,根据实际需求选择合适的材料和尺寸。
对于大型起重机,通常采用钢材作为主要结构材料,同时引入增强结构和补强措施,以提高起重机的稳定性和抗风能力。
二、工作原理龙门式起重机的工作原理基于悬臂悬挂制动机构。
起重机梁通过大车和小车的协同工作,实现负载的提升和运输。
大车沿龙门桥架进行水平移动,而小车则沿起重机梁进行上下移动。
起升机构则通过绞车机构来完成物体的起升。
龙门式起重机的工作原理需要保证各个部件的稳定性和协调性。
在设计中,要合理安排各个控制系统,如限位开关、传感器和安全装置,以保证起重机的安全运行。
同时,需要考虑重物的重心位置和干扰因素,以提供合适的控制策略和操作方法,以保证起重机的准确操作。
三、优化措施为提高龙门式起重机的工作效率和安全性,可以采取以下优化措施:1.采用先进的控制系统和传感器:利用先进的自动控制技术和传感器系统,可以实现更精确的控制和监测,提高起重机的工作效率和安全性。
2.设计合理的运动机构:对大车、小车和起升机构的运动机构进行合理的设计,减小机械摩擦和振动,提高运动精度和稳定性。
3.考虑环境因素:在设计中要考虑起重机工作环境的特点,如温度、湿度、风力等因素,以确保起重机在恶劣环境下的正常工作。
4.优化结构设计:通过优化起重机的结构设计,减少结构自重,提高起重机的承载能力和工作效率。
5.定期维护和检测:对起重机进行定期的维护和检测,发现问题及时修复,确保起重机的正常运行和安全性。
龙门式起重机的结构设计及优化分析

龙门式起重机的结构设计及优化分析龙门式起重机是广泛应用于港口、工地、仓库等场合的一种常见起重设备。
它的结构设计和优化分析是确保起重机安全运行和提高工作效率的关键。
本文将从龙门式起重机的结构设计和优化分析两个方面来进行详细探讨。
一、龙门式起重机的结构设计龙门式起重机的结构设计主要包括桁架结构、大纵梁结构、移动机构和起升机构等几个方面。
1. 桁架结构:桁架结构是龙门式起重机的主要承载部分。
在设计中,需要根据起重机的工作负荷、工作范围和工作环境来选用合适的材料和结构形式。
常见的桁架结构有平行桁架和斜交桁架,设计时要注意桁架的刚度和稳定性。
2. 大纵梁结构:大纵梁是龙门式起重机的上部结构,用于支撑各种起重机构件。
在设计时,需要考虑大纵梁的强度、刚度和稳定性。
通常采用钢结构或钢混凝土结构,并在设计过程中考虑到连接方式、疲劳寿命和安装方式等因素。
3. 移动机构:移动机构是起重机能够在不同位置自由移动的关键部分。
在设计时,需要考虑运行安全、稳定性和移动速度等因素。
常见的移动机构有轮式移动机构和履带式移动机构,设计时要根据起重机的定位要求和场地地形来选择合适的机构类型。
4. 起升机构:起升机构是起重机能够进行垂直运动的关键部分。
在设计时,需要考虑起升机构的承载能力、工作高度和运行平稳性。
常见的起升机构有液压起升机构和电动起升机构,设计时要根据工作需求和使用环境来选择合适的机构类型。
二、龙门式起重机的优化分析龙门式起重机的优化分析是为了提高其工作效率、减少能耗和降低成本等方面而进行的。
以下是一些常用的优化方法和分析内容。
1. 结构优化:通过采用先进的结构材料和设计方法,如有限元分析和优化设计等,可以提高起重机的强度、刚度和稳定性,同时减轻自重和优化结构形式,从而提高起重机的工作效率。
2. 动力系统优化:起重机的动力系统是保证其正常运行的关键。
通过对动力系统的分析和优化,可以提高起重机的起升速度、运行平稳性和能源利用效率,并减少能耗。
龙门式起重机的结构设计与动力系统优化研究

龙门式起重机的结构设计与动力系统优化研究一、龙门式起重机的结构设计龙门式起重机是一种常用的大型起重机,它具有高度的稳定性和承重能力。
在进行结构设计时,需要考虑以下因素:1. 结构材料选择:龙门式起重机承重能力较大,需要选择高强度、耐磨损的结构材料。
常用的材料有钢铁、合金等。
2. 桁架结构设计:龙门式起重机的桁架结构是其重要组成部分,承担起主要的承重任务。
桁架结构的设计应确保桁架能够承受额定荷载,同时尽量减小结构自重,提高整机工作效率。
3. 工作范围和自由度:龙门式起重机的工作范围和自由度需根据实际需求确定。
一般情况下,工作范围越大、自由度越高,起重机的作业效率越高。
4. 安全性设计:龙门式起重机的安全性设计至关重要。
包括防止翻倒、滑移、断裂等安全措施的考虑,以及设计合理的安全保护装置,如限位器、传感器等。
二、龙门式起重机的动力系统优化研究1. 动力系统选型:龙门式起重机的动力系统选择应根据起重机的工作条件和工作负荷来确定。
一般情况下,液压系统和电机驱动系统是常用的动力系统。
2. 动力系统控制:动力系统的控制是起重机性能优化的关键。
需要设计合理的控制算法和系统,以实现起重机的运动精确控制,提高运行效率和安全性。
3. 能源利用效率优化:龙门式起重机在工作过程中会消耗大量能源,因此需要进行能源利用效率优化的研究。
例如,在减少能源损失方面进行改进或使用新型节能技术,如变频调速技术、能量回收技术等。
4. 运动学和动力学仿真:通过运动学和动力学仿真研究,可以对龙门式起重机的运动行为和动力特性进行模拟和优化。
可使用专业仿真软件进行模拟实验,以提高起重机的运动精度和工作效率。
5. 效率和可靠性监测:对龙门式起重机的动力系统进行效率和可靠性监测,可以及时发现问题并进行修复和改进。
可使用传感器等设备对动力系统进行监测,并分析数据,以提高起重机的整体性能。
总结:龙门式起重机的结构设计和动力系统优化研究对于提高起重机的性能和效率至关重要。
龙门式起重机的结构优化与性能改进

龙门式起重机的结构优化与性能改进龙门式起重机是一种常见的起重设备,其具有结构简单、承载能力强、使用灵活等优点。
为了进一步提高起重机的性能和效率,以及减少结构的重量和成本,公司决定对龙门式起重机进行结构优化和性能改进。
一、结构优化1. 引入轻量化材料:传统的龙门式起重机一般由钢结构组成,为了减轻其自重,可以考虑采用强度高、重量轻的合金材料,如铝合金或碳纤维复合材料。
这样可以降低起重机的自重,提高其承载能力和工作效率。
2. 优化设计参数:通过对龙门式起重机的设计参数进行优化,可以改善其结构强度和刚度。
例如,可以调整龙门腿部的截面形状和尺寸,以增加其抗弯刚度和承载能力。
同时,还可以优化吊臂的长度和倾斜角度,以改善起重机的动态特性和稳定性。
3. 采用优化算法:利用现代优化算法,如遗传算法、粒子群算法等,对龙门式起重机的结构进行优化。
通过调整各个部件的尺寸和布局,使得起重机的结构达到最优的轻量化效果。
同时,还可以将多目标优化算法应用于结构优化,以平衡起重机的结构强度、轻量化程度和成本。
二、性能改进1. 自动化控制系统:引入先进的自动化控制系统,提升起重机的操作性能和工作效率。
通过使用传感器和执行器,可以实现起重机的自动控制,包括自动定位、自动抬升、自动横移等功能。
这样不仅可以提高起重机的工作精度和速度,还可以减少人工操作的疲劳和错误。
2. 智能诊断与维护:利用物联网技术和人工智能算法,实现起重机的智能诊断和维护。
通过对传感器数据的实时监测和分析,可以判断起重机是否存在故障或异常,从而及时采取维修措施,减少停机时间和维修成本。
同时,还可以利用大数据分析技术,对起重机的工作过程进行优化和改进,提高其工作效率和能耗管理。
3. 安全监测系统:加强起重机的安全监测和控制,确保其在工作过程中的安全性和稳定性。
可以通过安装各种传感器,如倾斜传感器、载荷传感器等,实时监测起重机的倾斜角度、负载情况等参数。
当超过安全阈值时,系统会自动发出警报或采取紧急制动措施,以防止起重机的翻倒或超载等事故。
大型龙门式加工中心的主轴系统优化设计研究

大型龙门式加工中心的主轴系统优化设计研究引言随着制造技术的发展,大型龙门式加工中心在各个工业领域中扮演着重要的角色。
其中,主轴系统作为该设备的核心组成部分,对于加工效率、加工质量和设备稳定性有着重要的影响。
因此,对大型龙门式加工中心的主轴系统进行优化设计研究,将对提高设备的性能和竞争力具有重要意义。
一、主轴系统的作用和结构大型龙门式加工中心的主轴系统具有至关重要的作用。
主轴系统主要负责转动刀具、传递切削力,其结构设计直接影响设备的刚度、精度、加工效率和稳定性。
主轴系统一般由电机、主轴、轴承和冷却系统等部分组成。
通过电机驱动主轴旋转,轴承负责支撑和导向主轴运动,冷却系统则通过循环冷却剂来降低主轴温度,保证设备稳定运行。
二、主轴系统优化设计的目标针对大型龙门式加工中心的主轴系统,优化设计旨在实现以下目标:1. 提高加工效率:通过优化主轴转速和传递效率,提高设备的加工速度和效率,降低零件加工时间。
2. 提高加工精度:通过优化主轴结构和轴承设计,减小振动和摆动,提高设备的加工精度和表面质量。
3. 提高设备稳定性:通过优化主轴系统的结构和传动系统,提高设备的刚度和稳定性,减小加工过程中的振动和噪音。
4. 提高设备寿命:通过优化主轴的润滑系统和冷却系统,降低主轴的磨损和热量积聚,延长设备的使用寿命。
三、主轴系统优化设计的方法针对大型龙门式加工中心的主轴系统优化设计,可以采用以下方法:1. 结构改进:通过改进主轴和轴承的结构设计,提高设备的刚度和承载能力,减少振动和杂音。
2. 材料优化:选择高强度、高刚度的材料制造主轴和轴承,提高设备的稳定性和使用寿命。
3. 传动系统优化:优化主轴传动系统的布局和齿轮设计,提高传递效率和精度。
4. 润滑系统改进:采用高效的润滑系统,保证主轴及轴承的充分润滑,减小磨损和摩擦,延长设备寿命。
5. 冷却系统优化:设计高效的冷却系统,降低主轴的温升,提高设备运行稳定性。
四、主轴系统优化设计的效果经过以上优化设计的改进,大型龙门式加工中心的主轴系统将能够获得以下效果:1. 加工效率得到提升:优化主轴转速和传递效率,设备的加工速度和效率将得到显著提高,实现更快的加工速度和更短的加工周期。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
V o l 2 7 N o 6 D e c 2 0 1 4
文章编号: 1 6 7 3 1 5 4 9 ( 2 0 1 4 ) 0 6 0 0 4 7 0 4
D O I : 1 0 . 1 1 8 6 3 / j . s u s e . 2 0 1 4 . 0 6 . 1 2
图 6 滑枕结构调整前后对比图
结构改进前后, 整机静力及模态分析结构见表 4与 表5 。从静力分析结果比较中可以发现: 横梁及滑枕结 构的改善不仅使质量有微弱减轻, 同时其刀尖位移变形 量也减小了 1 9 6 %, 这说明对于提高该龙门加工中心的 加工精度及工作性能是行之有效地。 模态分析结果中, 新整机前五阶固有频率与改进前 整机数值相比, 都有了小幅提高, 这说明通过对滑枕和
表 4 整机机构改进前后静力结果分析
2 有限元模型建立
静力学分析中, 网格划分采用 A N S Y SWo r k b e n c h三 维实体单元 S o l i d 1 8 6 , 该单元为三维 6面体 2 0节点的结
收稿日期: 2 0 1 4 0 5 1 1 基金项目: 人工智能四川省重点实验室科研项目( 2 0 1 3 R Y Y 0 3 ) ; 四川省教育厅重点项目( 1 4 Z A 0 2 0 9 ) ; 自贡市科技局项目( 2 0 1 3 J 1 9 ) 作者简介: 杨海栗( 1 9 8 8 ) , 女, 四川成都人, 助教, 硕士, 主要从事结构设计及 C A E仿真分析研究, ( E m a i l ) y h l s e a 3 2 4 @1 6 3 . c o m
由分析结果发现, 滑枕的静强度与动态性能都较 好, 但根据加工中心整体结构, 可发现其存在结构过长 的现象, 这一设计既增加了自身质量, 缩短了行程, 又加 剧了刀尖变形趋势。滑枕结构改进前后对比如图 6所 示。修改前后行程增加 2 9 0m m , 质量减轻 1 2 6k g 。
由表 3可知, 该龙门加工中心的前两阶固有频率偏 低, 只有 3 0 1 7 7H z 和3 2 5 1 5H z , 动态特性较差。4 、 5 、 6 阶有密频现象。 结合前面静力分析的结果可知: 横梁、 滑枕是其较 为薄弱环节。这是由于该加工中心横梁 x 向的刚度低 以及滑枕长度过长, 造成整机低阶固有频率偏低及总位 移量较大。
表 1 材料属性
材料 H T 3 0 0 高速钢 结构钢 密度 / ( k g / m 2 ) 7 3 4 0 1 4 8 0 0 7 8 5 0 弹性模量 / G P a 1 5 4 E+ 1 1 2 E+ 1 1 2 E+ 1 1 泊松比 0 2 7 0 3 0 3
图 3 整机受 x 向切削力时的应力结果
图 4 一、 二阶模态 表 3 前 6阶模态分析数值
阶数 1 2 3 4 5 6 频率 / H z 3 0 1 7 7 3 2 5 1 5 5 2 3 3 5 6 0 8 0 3 6 3 4 6 4 6 6 8 7 3 振型描述 立柱、 纵梁、 横梁沿 Y方向左右振动 横梁、 滑座、 滑枕绕 Y轴翻转 立柱、 横梁、 滑座、 滑枕绕 Y轴翻转 支撑座绕 Y轴前后翻转 整机绕 Z轴转动 立柱和纵梁在 Y向左右振动
1 0 ] 动性能的关键 [ , 本文通过 A N S Y SWo r k b e n c h计算前
六阶整机固有频率。前两阶固有频率值如图 4所示, 总 体前六阶固有频率及振型见表 3 图 5 横梁筋板结构调整前后对比图
( 2 )滑枕结构改进
第2 7卷第 6期 2 0 1 4年 1 2月
四川理工学院学报( 自然科学版)
J o u r n a l o f S i c h u a nU n i v e r s i t yo f S c i e n c e&E n g i n e e r i n g ( N a t u r a l S c i e n c eE d i t i o n )
图 1 龙门加工中心简化模型
均为 1 6 0 0N 。其分析结果对比见表 2 , 图 3给出了整机 受x 向切削力作用下的应力情况。
表 2 整机同时受重力及切削力情况下的分析结果
分析情 况及位 置图示 总位移及各向最 m m 大位移 / 总位移 受x 向 切削力 x 向 y 向 z 向 总位移 受y 向 切削力 x 向 y 向 z 向 总位移 受z 向 切削力 x 向 y 向 z 向 0 1 6 3 0 0 1 3 8 0 0 0 0 9 2 0 1 0 6 0 0 1 3 6 0 0 0 9 7 0 0 0 3 6 0 0 0 9 7 6 0 1 2 5 0 0 1 0 7 0 0 0 0 8 9 0 0 8 9 6 1 1 5 6 1 1 9 8 1 2 9 2 最大应力 / M P a 与只受自重 情况相较的位 移增量 / m m 0 0 0 9 0 0 0 0 1 0 0 0 0 0 4 0 0 0 5 8 - 0 0 1 8 0 - 0 0 4 0 0 0 2 7 2 0 0 0 2 6 - 0 0 2 9 0 0 0 3 0 0 0 0 0 0 1 - 0 0 1 0 6
4 8
四川理工学院学报( 自然科学版) 2 0 1 4年 1 2月
3 龙门整机静力分析
静刚度 是 金 属 切 削 机 床 中 最 重 要 的 性 能 指 标 之 一
[ 9 ]
, 本文根据龙门加工中心在 实 际 工 作 中 的 受 力 情
况, 考虑其自重、 垂直于切削速度方向上的切削力分量 及滑枕和十字滑座等在不同工位对整机形变的影响, 针 对滑枕处于最下端、 十字滑座处于横梁中部、 横梁处于 纵梁尾部这一最恶劣的工况进行分析研究。分析时将 只受重力及同时受重力和切削力这两种情况进行对比 分析。 根据实际安装情况, 分析时将整机底部进行全约 、 y 、 z 三向切削力, 该力 束, 并针对不同情况施加重力及 x 为机床主轴在 3 0 0 0r m p 下进行切削时所受切削力, 各向
5 0
四川理工学院学报( 自然科学版) 2 0 1 4年 1 2月 横梁结 构 有 限 元 分 析 !&#% 机 床 与 液 压 $'(""$-. )""+, "-/% "-"
变形量 改变 % 比率 / 减小 1 9 6 减小 0 0 0 0 7
横梁结构改进, 整机的动态性能有所提高。
[ 1 ]
引 言
龙门加工中心已成为加工制造行业的重要工艺加 工设备之一 。鉴于广泛的市场需求, 国内外主要机床
生产商 也 开 始 研 发 各 种 高 速、 高精度的龙门加工中
2 ] 。龙门加工中心整体结构复杂, 由多个大型零部件 心[
1 整机实体建模
本文采用 S o l i d Wo r k s进行龙门加工中心各零部件 的三维建模。其零部件结构较为复杂, 且由于加工、 安 装、 定位等工艺需要, 其结构存在工艺孔、 过渡圆角、 小 凸台等细小特征。这些结构特征尺寸较小, 如果进行精 确建模, 将会导致网格划分时单元尺 寸 过 小 且 数 目 过 多, 需耗费大量时间进行计算, 但对整体的分析结果影 响甚小, 建模时需对这些特征进行简化或加以忽略。整 机模型如图 1所示。 模型建立完成后, 运用 A N S Y SWo r k b e n c h与 S o l i d Wo r k s 的无缝连接直接导入 A N S Y S 软件中, 该方法很好 地避免了复杂零件结构细节数据的丢失, 保证了零件结
7 8 ] 。 构的完整性 [
组装而成, 只针对部件进行研究无法切实得出整机的加 工精度值, 因此有必要对整机进行动、 静态特性分析。 目前, 针对龙门加工中心已有许多学者对其开展研 究。丁长春
[ 3 ]
等对龙门加工中的立柱结构进行静力学
[ 4 ]
分析, 并最终完成结构优化。王芳 计。张飞
[ 5 ]
4 9
侧靠近支撑处。因此, 改进方案为: 在应力较为集中处 进行纵向加筋, 并调整前端横梁横向筋板密度以改善其 中部的弯曲现象。筋 板 结 构 调 整 前 后 情 况, 如 图 5所 示。
4 龙门整机模态分析
龙门加工中心的静态特性在一定程度上反应了其 静刚度, 并能由此判断机床的抗变形能力。为保证加工 中心具有很好的加工精度和加工效率, 还要求整机结构 具有良好的动态特性, 而机械结构前几阶模态是机床振
龙门加工中心整机动静态分析及结构优化
杨海栗,田建平,胡 勇,付 磊,黄丹平
( 四川理工学院机械工程学院,四川 自贡 6 4 3 0 0 0 )
摘 要: 以S o l i d Wo r k s 三维建模软件与 A N S Y SWo r k b e n c h 有限元分析软件为平台, 建立龙门加工中 心整机动静态分析模型, 由分析得到整机在只受重力、 以及重力与切削力同时作用这两种工况下的位移 量数据及其相对变化量, 得出整机的结构刚性及固有频率值, 并综合分析结果提出滑枕及横梁的结构优 化方案, 通过结构改进减小整机变形量, 提高整机加工精度, 为加工时的误差补偿提供了理论依据。 关键词: 龙门加工中心; 整机; 静力特性; 动力特性; 结构优化 中图分类号: T P 3 9 1 文献标志码: A 及整机可靠性, 并针对薄弱环节进行结构优化, 从而提 高整机加工精度, 并为加工时的误差补偿提供必要的理 论依据。
5 横梁及立柱的结构优化
通过前文分析可知, 设计中应适当提高横梁的抗扭 刚度, 并同时调整滑枕至合理长度, 最终减小重力及切 削力作用下的机床变形。这是该加工中心提高其动、 静 态性能的关键。 ( 1 )横梁结构改进 根据整机静力分析可知, 十字滑座位于横梁中部 时, 其应力变化情况左右对称且应力较大处位于横梁两
结合表 2及图 3可以发现, 最大应力值出现在十字 滑座与横梁连接处, 其值为 1 2 9 2M P a , 此时刀具受 x 向 切削力。由此 可 见 该 加 工 中 心 x向 静 刚 度 相 对 较 弱。 在该情况下各向位移量也为最大, 刀尖处总位移量达