汽车主销内倾测量精度分析及校准仪器
汽车悬架系统之车架与车桥
钢板弹簧座平面检查(平面>2mm, 定位孔>1mm,堆焊加工或更换)
主销承孔检查(轿车≯0.1mm,货车 ≯0.2mm,否则,可用镶套法或修理尺寸法或更 换)
二、前轮最大转向角的检查和调整
大,否则也会使轮胎产生偏磨损。
• D. 前轮前束
俯视车轮,汽车的两个前轮旋转平面并不完 全平行,而是稍微带一点角度,前端距离小于后 端距离,这种现象称为前轮前束。A-B的差值为 前束值。如图
作用:
抵消由于前轮外倾
车轮向外滚动的趋势,
保证车轮沿直线方向
纯滚动。
前束值是靠人工调整的,通过检查A和B 的距离相减,对照不同车型的前束值,不 符应调整(通过横拉杆调整)。
立悬架相配 1.与非独立悬架匹配的转向桥 图9-12、9-13
汽车非独立悬架转向桥主要由前梁、转向节、 转向主销等几部分组成
• 转向节止推轴承的结构形式qc293-4-12
2.与独立悬架匹配的转向桥 图9-15
独立悬架采用的断开式转向桥,如 图为红旗CA7560型轿车的转向桥与前悬架: 减振器加速振动的衰减,提高行驶平顺性; 上摆臂和上球头销不可拆,靠弹簧自动调 整间隙;下摆臂和下球头销可拆,靠垫片 调整间隙;属于无主销式转向节。
• 但是,由于车辆在售出并行驶一段时间后, 这些定位角度会由于交通事故、道路坑洼不 平造成的剧烈的颠簸(特别是高速行驶时突 然遇到不平路面)、底盘零件磨损、更换底 盘零件、更换轮胎等原因而产生变化。一旦 定位角度由于任何一种原因产生变化,就可 能产生诸如轮胎异常磨损、车辆跑偏、安全 性下降、油耗增加、零件磨损加快、方向盘 发沉、车辆发飘等不适症状。有些症状使车
四轮定位试验报告
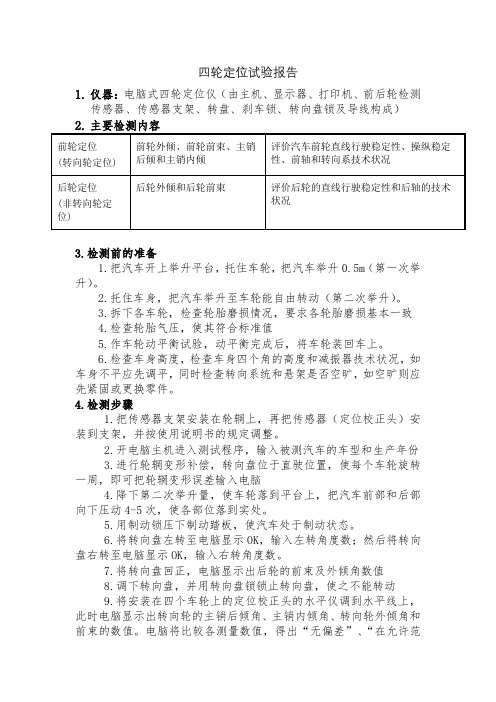
四轮定位试验报告1.仪器:电脑式四轮定位仪(由主机、显示器、打印机、前后轮检测传感器、传感器支架、转盘、刹车锁、转向盘锁及导线构成)2.主要检测内容前轮定位(转向轮定位)前轮外倾、前轮前束、主销后倾和主销内倾评价汽车前轮直线行驶稳定性、操纵稳定性、前轴和转向系技术状况后轮定位(非转向轮定位)后轮外倾和后轮前束评价后轮的直线行驶稳定性和后轴的技术状况3.检测前的准备1.把汽车开上举升平台,托住车轮,把汽车举升0.5m(第一次举升)。
2.托住车身,把汽车举升至车轮能自由转动(第二次举升)。
3.拆下各车轮,检查轮胎磨损情况,要求各轮胎磨损基本一致4.检查轮胎气压,使其符合标准值5.作车轮动平衡试验,动平衡完成后,将车轮装回车上。
6.检查车身高度,检查车身四个角的高度和减振器技术状况,如车身不平应先调平,同时检查转向系统和悬架是否空旷,如空旷则应先紧固或更换零件。
4.检测步骤1.把传感器支架安装在轮辋上,再把传感器(定位校正头)安装到支架,并按使用说明书的规定调整。
2.开电脑主机进入测试程序,输入被测汽车的车型和生产年份3.进行轮辋变形补偿,转向盘位于直驶位置,使每个车轮旋转一周,即可把轮辋变形误差输入电脑4.降下第二次举升量,使车轮落到平台上,把汽车前部和后部向下压动4-5次,使各部位落到实处。
5.用制动锁压下制动踏板,使汽车处于制动状态。
6.将转向盘左转至电脑显示OK,输入左转角度数;然后将转向盘右转至电脑显示OK,输入右转角度数。
7.将转向盘回正,电脑显示出后轮的前束及外倾角数值8.调下转向盘,并用转向盘锁锁止转向盘,使之不能转动9.将安装在四个车轮上的定位校正头的水平仪调到水平线上,此时电脑显示出转向轮的主销后倾角、主销内倾角、转向轮外倾角和前束的数值。
电脑将比较各测量数值,得出“无偏差”、“在允许范围内”或“超出允许范围”的结论。
10.若“超出允许范围”,按电脑提示的调整方法进行针对性调整。
调整后仍不能解决问题,则应更换有关零部件。
模块六:任务1.04分析主销后倾和内倾定义作用及影响

主销后倾、主销内倾的定义、作
用、影响及调整
01
教学目标
描述的主销、主销后倾角、主销内倾角的定义
理解主销后倾角的作用、影响、调整(重点)
指出主销内倾角的作用、影响、调整(重点)
1. 主销后倾角的定义
主销:转向轮的回转轴线
主销
主销
3
1. 主销后倾角的定义
主销:转向轮的回转轴线
到的力矩满足如下关系: × = −
主
销
其中: 为向心力; 为向心力到主销轴线的距离; 为
驾驶员施加在方向盘上的力矩。
2. 在50°位置松开方向盘, =0,轮胎在水平面受到
的力矩只有
×
方向盘自动回正受力分析
7
2. 主销后倾角的作用
作用2
转向时,左右轮胎向转向侧倾斜,减轻离心力,增加抓
后倾过大:同时转向沉重,前轮轻微吃胎;高速转向越稳定
后倾过小:回正效果差,高速转向不稳定,转向发飘
两侧不一致:汽车跑偏,哪边数值小向哪边跑偏
4.主销后倾角的调整
依据悬架形式进行,麦弗式悬挂,则采用调节硬点(塔顶),双叉臂通过对上控制臂添加垫片进行调节
5. 主销内倾角的定义
在车的横向平面内,转向轴与垂线间的倾角
麦弗逊悬架
双叉臂悬架
10
5.主销内倾角的定义
﹢
垂线
主销内倾:在车的横向平面内,转向轴与垂线间的倾角
转向轴
减震器
轮胎
√
√
地面
11
6.主销内倾角的作用及定位不当影响
作用:方向盘回正
主销内倾不当的影响
内倾过大:转向沉重,加速轮胎磨损
四轮定位仪主销后倾角测量方法

四轮定位仪主销后倾角测量方法(先后倾γ,再内倾β)四轮定位仪对主销后倾角的测量一般采用间接量,方法是将车轮右转20º,再左转20º(图1中的δ=20º),测出车轮轴相对水平面的角度λ。
设该角度的变化量为Δλ,则主销后倾角γ=1.4619Δλ。
现写出这个测量方法的计算过程:若主销无后倾、无内倾,则主销竖直。
取车前进方向为x轴,竖直向上为z 轴,以左前轮为例,这时车轮轴指向车左侧,取该方向为y轴。
如图1。
转动方向盘时,车轮轴将在水平面内运动。
即xoy平面。
设主销后倾角为γ,坐标系oxyz绕y轴转动γ角,为ox1y1z1坐标系,设主销内倾角为β,坐标系ox1y1z1绕x1轴转动β,为ox2y2z2坐标系。
这时车轮轴与水平面的夹角为β(沿y2轴)。
转动方向盘,使车轮右转δ度,车轮轴在x2oy2平面中转动。
设车轮轴OA 长为R,A点在ox2y2z2坐标系中的坐标为A(x2,y2,z2)。
x2=R sinδ; y2=R cosδ; z2=0用坐标旋转公式计算A点在ox1y1z1坐标系中的坐标A(x1,y1,z1),见图2。
x1=x2; y1=y2cosβ; z1=y2sinβ即x1=R sinδ; y1=R cosδcosβ; z1=R cosδsinβ再计算A点在oxyz坐标系中的坐标A(x,y,z)。
见图3。
x=x1cosγ−z1sinγ; y=y1; z=x1sinγ+z1cosγ即x=R sinδcosγ−R cosδsinβsinγy=R cosδcosβz=R sinδsinγ+R cosδsinβcosγ设车轮轴与水平面的夹角为λ,则sinλ=zR λ=sin−1zR近似计算λ=sinλ=zR= sinδsinγ+cosδsinβcosγ转角δ为对称时(δ1=-20º, δ2=20º)Δλ=2sinδsinγ=2γsinδγ=Δλ/(2sinδ)=1.4619Δλ程志惠 2014年7月26日于西安。
转向主销定位参数和接地点偏距的解析研究

2021年(第43卷)第5期汽车工程Automotive Engineering2021(Vol.43)No.5转向主销定位参数和接地点偏距的解析研究杨一洋,谢敏松(泛亚汽车技术中心有限公司,上海200135)[摘要]本文中提出一种新的车轮转向主销参数及其接地点偏置距的解析方法,适合于不同车型,包含车轮定轴转动的悬架和虚拟主销悬架的车辆。
首先分析了车轮微小转动前后的车轮定位矢量,然后根据空间旋转的变换矩阵,并通过误差修正迭代求解出满足误差阈值的主销定位参数。
最后选取某两汽车厂家不同悬架型式的车辆进行验证,实车的数据与解析计算结果基本吻合,表明了推导的车轮转向主销参数及其接地点偏置距解析法的准确性。
此外该解析法还可连续表达各转向角度下的主销参数。
关键词:主销;车轮转动;接地点偏置距;悬架K&C;解析法An Analytical Study of Alignment Parameters and Ground IntersectionOffset of Steering KingpinYang Yiyang&Xie MinsongPan Asia Technical Automotive Center Co.,Ltd.,Shanghai200135[Abstract]In this paper,an analytical method for the steering kingpin parameters and the offsets of its in⁃tersection point with ground surface is proposed,which is suitable for both the suspension with physical kingpin and that with virtual one.First of all,the wheel alignment vectors before and after a micro⁃rotation are analyzed.Then ac⁃cording to the transforming matrix of spatial rotation and through error correction iteration,the kingpin alignment pa⁃rameters meeting the requirement of error threshold are solved out.Finally,two vehicles with different types of sus⁃pension are analyzed for verification.The well agreement between the real vehicle data and analytical results demon⁃strates the correctness of the derived analytical method for the steering kingpin parameters and its offsets.Besides,the analytical method can also continuously express the kingpin parameters at different steering angles.Keywords:kingpin;wheel rotation;ground intersection offset;suspension K&C;analytical me⁃thod前言车轮转向主销定位参数对车辆运动的力学稳定性起着至关重要的作用[1-2]。
独立悬架的后轮为什么易偏磨啃胎多图超详细

四轮定位基本知识luosanping从汽车的正上方向下看,由轮胎的中心线与汽车的纵向轴线之间的夹角称为前束角。
总前束值等于两个车轮的前束值之和,即两个车轮轴线之间的夹角。
☆作用:消除车轮外倾造成的不良后果.车轮外倾使前轮有向两侧张开的趋势,由于受车桥约束,不能向外滚开,导致车轮边滚边滑,增加了磨损,有了前束后可使车轮在每瞬间的滚动方向都接近于正前方,减轻了轮毂外轴承的压力和轮胎的磨损。
通常情况下汽车的侧倾角为外倾。
吃胎doggog前轮前束,是使汽车两前轮的前端距离小于后端距离。
从汽车的上面往下看,左右两个前轮形成一个开口向后的“八”字形。
采用这种结构目的是修正上述前轮外倾角引起的车轮向外侧转动。
另一方面,由于车轮倾斜,左右前轮分别向外侧转动,为了修正这个问题,如果左右两轮带有向内的角度,则正负为零,左右两轮可保持直线行进,减少轮胎磨损。
未曾曝光的最高机密四轮定位工序详解e探索发现我们都知道前束值对于车身行驶方向的影响,前束出现偏差,车辆会跑偏,但如果仅将前轮的前束调整到位而不去管后轮的偏差(很多人都觉得只要把转向轮调到标准就可以了),完全可以改善跑偏的现状,以达到车主的满意,但对于整个车身而言是非常不利的,后轮前束的不正确会致使车身处于较劲的状态,这些力会从轮胎与地面的摩擦中释放出去,长此以往,则加剧了轮胎的磨损。
用方向盘和转向机的角度来弥补四轮定位调整上的不足。
汽车前轮的设计,四轮定位,主销后倾,主销内...瞬间刹那汽车前轮的设计,四轮定位,主销后倾,主销内倾,前轮外倾,前轮前束汽车前轮的设计,四轮定位,主销后倾,主销内倾,前轮外倾,前轮前束。
四轮定位1. 四轮定位内容:主销后倾角,主销内倾角,前轮外倾角,前轮前束,外侧车轮二十度时,内外转向轮转角差,后轮外倾角,后轮前束。
如同时需要调转弯半径和前轮前束,必须先调前轮前束,因为条前轮前束会改变转弯半径,调转弯半径不会改变前轮前束。
车轮定位基础知识厚德务实一般来说,汽车维修工需要检查前轮的5个定位参数:主销后倾角、车轮外倾角、车轮前束、转向轴内倾角和转弯外倾角(转弯时前轮后束)。
电气测量仪器的精度分析与校准
电气测量仪器的精度分析与校准引言电气测量在各个领域中起着重要的作用,而测量仪器的精度则是保证测量结果准确性的关键。
本文将探讨电气测量仪器的精度分析与校准方法,以提高测量的可靠性和准确性。
一、测量仪器的精度简介在电气测量中,测量仪器的精度是指仪器所得到的测量结果与被测量真值之间的偏差程度。
精度通常用百分比表示,也可以用相对误差或绝对误差进行描述。
测量仪器的精度包括示数误差、线性误差、系统误差等多个方面。
示数误差是指仪器读数与被测量真值之间的差异。
线性误差是指仪器在整个测量范围内的读数与真实值之间的偏差,可通过绘制标定曲线进行分析。
系统误差是指由于仪器本身的结构、性能或使用环境等原因而引起的常规误差。
二、精度分析方法1. 标定法标定法是一种常见的精度分析方法,它通过与已知真值进行对比,以确定测量仪器的示数误差、线性误差等。
在进行标定时,需要选择适当的标准器具和稳定的工作环境,同时还要进行多个数据点的比对,以获得更加准确的结果。
2. 重复测量法重复测量法在一定程度上可以体现测量仪器的稳定性和可重复性。
通过多次测量同一物理量,并对比测量结果,可以分析仪器的示数误差和变异程度。
在进行重复测量时,要注意排除人为误差和外界环境干扰,以保证结果的可靠性。
3. 方差分析法方差分析法可以用来分析多因素对测量结果的影响程度,并评估各个因素对精度的相对重要性。
通过设计不同因素组合的实验,可以分析各个因素之间的相互作用和主次关系,为仪器的校准和优化提供依据。
三、校准方法1. 内部校准内部校准是指使用仪器自身内置的校准功能进行校准。
这种方法快捷方便,适合于日常测量中的准确性要求相对较低的场合。
在进行内部校准时,需要按照仪器说明书进行操作,并且定期进行校准的周期性检查。
2. 外部校准外部校准是指使用外部标准器进行校准,以提高仪器的准确性。
外部标准器需要具备较高的精度和稳定性,并且需要经过可追溯性的校准。
在进行外部校准时,需要确保标准器与被校准仪器之间没有相关误差,并且在校准过程中要注意减少温度、湿度等环境因素的影响。
汽车四轮定位原理与检测(1)

第一章绪论1.1 研究本课题的意义在现代汽车中, 操纵稳定性和行驶安全性被人们看得越来越重要了。
虽然已经有很多在这方面的研究,但是本文主要在分析汽车四轮定位原理和四轮定位测试系统原理,结合实验室台架阐述四轮定位仪汽车检测中的运用方面的研究,也是具有十分重要的意义的。
车辆在出厂时,定位角度都是根据设计要求预先设定好的。
这些定位角度用来共同保证车辆驾驶的舒适性和安全性。
但是,车辆在行驶一段时间后,这些定位角度会由于交通事故、道路坑洼不平造成的剧烈颠簸、底盘零件磨损、更换底盘零件、更换轮胎等原因而产生变化。
一旦定位角度产生变化,就可能导致诸如轮胎异常磨损、车辆跑偏、安全性下降、油耗增加、零件磨损加快、方向盘发沉等故障。
因此,进行四轮定位参数检验,使其处于合理范围内,对提高汽车的安全性及经济性有重要意义。
1.2国内外的发展状况国外针对车轮定位检测技术的研究较早,50年代就研制了相应的检测诊断设备,如美国、法国、德国、荷兰、日本以及意大利等,发展至今其自动化程度、精度都有了很大的提高。
我国在这方面的研究起步较晚,从60年代开始引进台架式四轮定位仪,80年代初,由武汉汽车研究所研制成功并投产了GCD-Ι型光束水准式前轮定位仪,但其自动化程度低,测量过程复杂,精度、效率较低,仪器功能不健全,只能测量传统的四个参数:前束、外倾、主销内倾及主销后倾。
到90年代末,国内厂家开始大量生产四轮定位仪,如营口玄豹的SDH3000,营口大力的DL-4800,烟台海德的HC4800,北京车安的AS-888等,但都处于探索阶段,推出的产品大都不太成熟。
至今能普及使用的、精度较高的国产自动化设备比较少,许多厂家是通过购买国外的传感器及软件的方式在国内进行组装生产,没有形成自己的知识产权,导致产品质量参差不齐。
目前中国的汽车工业发展迅速。
从整体上看中国汽车工业,仍然是一个国际竞争力较弱的产业。
从汽车产量上看,中国已成为世界汽车工业的主要制造基地之一。
汽车前轮定位之--主销后倾和主销内倾工作原理详解

1 . 主 销后 倾 的工作 原理
主销 安装 在前 轴 上 , 其 上 端 向 后
现 代汽 车 角一 般不 超 3 。 。 主 销 后
倾 角的 获得 一般 是前 轴 、 钢 板 弹 簧 和 车 架三 者装 配在 一起 时 , 由 于 钢 板 前 高 后低 , 使 前 轴 向 后 倾 斜 而 形 成 。 有
大 , 也就 是说 , 汽 车转 弯速 度越 快 , 向 心 力 F越 大 , 回正 力矩 越 大 , 回 正 效
果越 明显。然 而 , 向 心 力 F是 由 地 面
的 前 面 。 汽 车 转 弯 时做 圆 周 运 动 , 受
变 形等 原 因 , 都 将 使 主 销 后 倾 角 发 生
变化 。
汽车前轮定位之——主销后倾和 主销内 倾工作原理详解
朱
众 多教 科 书 中对 主销 后 倾 和 主 销 内 倾 能 够 保 持 汽 车 转 向 时 自动 回
正和 直 线 行 驶 的 工作 原 理讲 的不 够 深入 , 学 生不 好理 解和 掌握 。 下面详 细讲 解 主 销 后 倾 和 主 销 内倾 的 工作
的 在 钢 板 座 后 部 加 装 楔 形 垫 片 而 形
倾斜 , 这 种 现 象 叫 主 销 后 倾 。 在 纵 向
垂直 平 面 内 , 垂 线 与 主 销 轴 线 之 间 的 夹 角 叫 主 销 后 倾 角 ( 如 图 1所 示 ) 。 主 销 后 倾 的 作 用 主 要 是 为 了 保 持 汽 车直 线行 驶 的稳 定性 , 并 使 汽 车 转 向 后 前 轮 有 自动 回 正 的 作 用 。主 销 具 有 后倾 角 时 , 主 销 轴 线 的 延 长 线 与 路 面
汽车车轮定位、主销后倾、内倾、外倾、前、后轮前束

轮胎转向回位功能不好,是哪 个前轮参数问题?
*
工贸汽修标准化课程体系
知识改变命运!
谢谢您的聆听与参与!
25
*
工贸汽修标准化课程体系
四、前轮外倾
定义及作用:
其旋转平面上端向 外倾斜,这种现象 称为转向外倾。 车轮外倾角的作用 是提高车轮工作的 安全性和转向操纵 的轻便性。
*
工贸汽修标准化课程体系
前轮外倾角
什么是车轮外倾?有何作用?
转向车轮安装在转向节上时,其选择平面上端向外倾斜, 这种现象称为转向车轮外倾。车轮旋转平面与垂直于车辆支 承面的纵向平面之间的夹角称为车轮外倾角。
*
工贸汽修标准化课程体系
六、后轮前束
后轮前束的作用如同前轮前束一样,后轮前束也是后轮定位的一个重 要项 目。如果前束不当,后轮轮胎也会被擦伤, 还会引起转向不稳定及制 动效能降低等不良 后果。
1)后轮外倾角
车轮倾角不是静态的,而是随悬架的上下移动而变化 的。用后独立悬架的大多数车 辆为了对载荷进行卜偿,常有一个较小的正后 轮外倾角。在使用中,后轮驱动车辆在转矩 过大、严重超载或道路损坏的情 况下,使汽车后桥壳变弯,或滑柱筒破坏、错位,上控制 臂衬套破坏、滑柱 弯曲等都会使后轮夕卜倾角产生负夕卜倾角的趋势)转向节弯曲、下控制臂 弯曲也会使后轮外倾角过大,因此,应有较小的正后轮外倾角来抵消。
车轮外倾角的作用是提高车轮工作的安全性和转向操作 的轻便宜性。
工贸汽修标准化课程体系
前轮外倾角
特点:
前轮外倾角是由 转向节的结构确 定的。 数值不正确容易 引起轮胎偏磨。
如果出现偏差怎么办?
*
工贸汽修标准化课程体系
外倾角
工贸汽修标准化课程体系
车轮定位实训报告

一、实训目的本次车轮定位实训旨在通过实际操作,使学生掌握汽车车轮定位的基本原理、操作步骤及注意事项,提高学生对汽车维修实践能力的认识,为今后从事汽车维修工作打下坚实基础。
二、实训内容1. 车轮定位概述车轮定位是指通过调整汽车车轮的定位角度,使其达到最佳行驶状态,提高汽车行驶的稳定性和安全性。
车轮定位主要包括前轮定位和后轮定位,其中前轮定位包括主销后倾、主销内倾、前束和车轮外倾。
2. 车轮定位仪器及工具实训过程中,我们使用了以下仪器和工具:(1)四轮定位仪:用于测量车轮定位角度。
(2)举升机:用于将汽车抬起,便于进行车轮定位操作。
(3)扳手、螺丝刀等基本工具:用于拆卸和安装车轮、悬挂部件。
3. 车轮定位操作步骤(1)准备工作:检查车辆外观,确认无异常情况;检查车轮气压,确保在规定范围内。
(2)放置举升机:将举升机放置在车辆下方,确保其稳固。
(3)抬起车辆:使用举升机将车辆抬起,使车轮离地。
(4)拆卸车轮:拆卸车轮、刹车盘、刹车片等部件。
(5)测量车轮定位角度:使用四轮定位仪测量车轮主销后倾、主销内倾、前束和车轮外倾等角度。
(6)调整车轮定位角度:根据测量结果,调整车轮定位角度,确保其符合规定范围。
(7)安装车轮及部件:将拆卸下的车轮及部件重新安装。
(8)检查并试车:检查车轮安装是否牢固,试车确认车轮定位效果。
三、实训过程及心得在实训过程中,我们严格按照操作步骤进行车轮定位,以下是我个人的心得体会:1. 严谨的操作态度:在进行车轮定位实训时,必须严格按照操作步骤进行,确保操作的准确性和安全性。
2. 仔细观察:在操作过程中,要仔细观察车辆各个部件的连接情况,确保无松动、变形等问题。
3. 互相协作:车轮定位实训需要多人配合完成,因此要注重团队协作,提高工作效率。
4. 不断总结:在实训过程中,要不断总结经验教训,提高自己的操作技能。
四、实训总结通过本次车轮定位实训,我深刻认识到汽车维修工作的重要性和复杂性。
主轴回转误差测量技术及其仪器调研报告
主轴回转误差测量技术及其仪器调研报告主轴的性能对产品质量的影响至关重要。
当认识了主轴的性能,就可以预测和控制零件的加工精度;工件的位置精度、粗糙度和表面光洁度都与主轴性能有关。
因此,工况下测量主轴的性能是很必要的,只有测量主轴回转才能从更深层面上来控制加工质量,进而加深对机床的了解。
通过测试可以优化主轴转速,通过温升曲线可获知机床的预热时间,通过冲击试验前后数据的对比分析,可检查主轴的损坏程度。
我公司此方面存在的问题目前公司机床主轴装配上只能依赖师傅经验,无法动态测试主轴回转轴心轨迹,亦无法知道机床主轴在磨削受力、温度变化的动态特性。
为提高机床产品精度,为机床主轴加工生产装配提供理论依据,此项试验研究急需开展!一、国内现状1、仪器方面目前国内仪器研制方面主要停留在软件开发方面,数据处理硬件亦无成熟稳定产品,并且需要自行配套传感器及装夹夹具和标准钢球。
主要厂家有:● 北京派莱博测头直径:测头工作面有效直径3mm测量范围:40微米~140微米(间隙)线形度:±0.05% 0.1%分辨能力:1纳米带宽: DC 500HzDC 3kHz2、应用方面国内做主轴轴心轨心测试的主要停留在高校实验室和一些研究所,还有一些飞机制造等精密主轴回转使用。
一方面夹具是自行设计,软件自行开发,另一方面是进口国外成熟的仪器。
二、国外1、仪器方面● Micro-Epsilon(德国) S601-0.2测量范围:200微米线形度:±0.2% 0.4%分辨率:8纳米带宽:6kHz(-3dB)● Lion Precision(美国) CPL290测量范围为100微米时线形度:±0.3%F.S. 0.6%分辨率:0.004% F.S.100微米X0.004%=4纳米带宽:10kHz(5%) 15kHz(3dB)● MTI Instruments(美国) AS9000分辨率:纳米级线性度:0.2%带宽:500Hz(标准)2、应用方面外国精密机床已把主轴回转误差测量作为机床精度检测必选项图为精密车床主轴回转精度检查(白色线为位移传感器,车头主轴端面装有标准钢球)三、美国LION主轴误差测量仪详细技术资料主要功能:可采集跟踪主轴瞬时转速变化、轴心轨迹、轴向位移,热变形配置:电涡流传感器及配套夹具、标准钢球及相关配套夹具、操作控制箱、处理软件。
主销内倾角、外倾角、前轮外倾角和前轮前束值及油底壳部位的油位传感器及平衡杆
这里所说的内容统称为转向轮定位。
其作用:当转向轮在受到偶然外力作用发生偏转时,在外力消失后,能自动回正,保持汽车直线行驶的稳定性,转向的轻便性,减少轮胎和机件磨损。
实现方法:转向轮、转向节和前轴三者之间按一定位置安装。
包括内容:主销后倾、主销内倾、前轮外倾和前轮前束。
(1)主销后倾:γ角,一般不超过3度。
主销安装在前轴上,其上端略向后倾斜,称为主销后倾。
在纵向平面内,主销轴线与垂线之间的夹角γ叫主销后倾角。
它实际是前桥后倾程度的反映。
作用:保证汽车直线行驶的稳定性,并力图使转弯后自动回正。
主销后倾角越大,越稳定,但转向越沉重。
(2)主销内倾:β角,一般不大于8度。
主销安装在前轴上,其上端略向内倾斜,称为主销内倾。
在横向平面内,主销轴线与垂线间的夹角β叫主销内倾角。
作用:使转向轮自动回正,并使转向轻便。
主销内倾角越大,或转向转角越大,汽车前部抬起越高,回正作用越强。
转弯越费力。
(3)前轮外倾:α角,一般为1度左右。
前轮安装在车桥上,其上端略向外倾斜,称为前轮外倾。
前轮旋转平面与纵向垂直平面之间的夹角α叫前轮外倾角。
作用:提高前轮工作的安全性,使转向轻便。
4、前轮前束A—B,一般在1~12mm之间。
前轮安装后,两前轮的旋转平面不平行,前端略向内束,称为前束。
两轮前端距离小于后端距离,其差值是前束值。
作用:消除因前轮外倾使汽车行驶时向外张开的趋势,减少轮胎磨损和燃料消耗。
前轮前束可通过改变横拉杆长度调整。
汽车四轮定位汽车的转向车轮、转向节和前轴三者之间的安装具有一定的相对位置,这种具有一定相对位置的安装叫做转向车轮定位,也称前轮定位。
前轮定位包括主销后倾(角)、主销内倾(角)、前轮外倾(角)和前轮前束四个内容。
这是对两个转向前轮而言,对两个后轮来说也同样存在与后轴之间安装的相对位置,称后轮定位。
后轮定位包括车轮外倾(角)和逐个后轮前束。
这样前轮定位和后轮定位总起来说叫四轮定位。
四轮定位的作用当车辆使用很长时间后,用户发现方向转向沉重、发抖、跑偏、不正、不归位或者轮胎单边磨损,波状磨损,块状磨损,偏磨等不正常磨损,以及用户驾驶时,车感漂浮、颠簸、摇摆等现象出现时,就应该考虑检查一下车轮定位值,看看是否偏差太多,及时进行修理。
汽车主销后倾角和内倾角的测量计算方法

角数据0和水 平方 向传感 器数 据西 ,再 内转2 。 0 ,得
到外 倾 角 数 据 和水 平源自方 向传 感 器 数据 ( ,最 后 , b
法推 导 出测量 汽车前 轮 主销后倾 角及 内倾 角 的精确 计算 公式 ,并将 其 运用 于 四轮定 位仪 的主销 角度测 量 计算 。现对 其加 以介绍 ,与同行 探讨 。
I 到位 置 Ⅱ时 ,外倾 角变 4 o 2_B D。 转  ̄ =/ O
再设 后 倾 角 为O,内倾 角为 ,外 倾 角为 ,水 t
面 显示 轮 胎 所 处 的转 角 位 置 ;图2 所示 为 :存 在 主
销 后倾 角 的情 况 下 ,轮胎 分 别 处 于 内转 2 。 外 转 0和
平 传感 器 为 ,转 盘转 角 为6 当转盘 转 角 为 时 。 。
不 成 立 的 。 因此 ,必 须 使 得 O D上B D,O D上C D。
又 因 为B D与 C D不 共 线 ,所 以 O D上平 面A 。 另 C
外 ,/B D为 平面 I的外倾 角 ,/C D ̄ 平 面 Ⅱ的 O O J 外 倾 角 ,且 /B D O :/C D,即 当轮 胎平 面 由位 置 O
平 面 交 点 为B、 C ,连 接 AB、AC, O B、 O , 贝 C 0
0 = , 0 上 A , DC _ j
关系。
2 主销 角度 测量 模型 原 理
传 感器 的两组外 倾 角差 值与 主销 角度 之 间 ,由
于结构 的原 因存 在 直接 的几 何关 系 。对 于双摆 臂 悬 架 结 构 ,轮 胎 通 过转 向节 、球 头摆 臂 与 车 身 连接 , 主销轴 线反 映 为上 下球 头之 间 的连线 :对 于麦 弗 逊 悬 架结 构 。轮胎 通 过转 向节 、下球 头 摆臂 及 滑柱 与 车 身连 接 ,主销 轴 线反 映为 下球 头与 上轴 承板 中心
主销后倾角的测量方法及测量装置与流程

主销后倾角的测量方法及测量装置与流程下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!一、引言在机械制造中,主销后倾角是指主销与容器轴线之间的夹角,对于容器的安全运行至关重要。
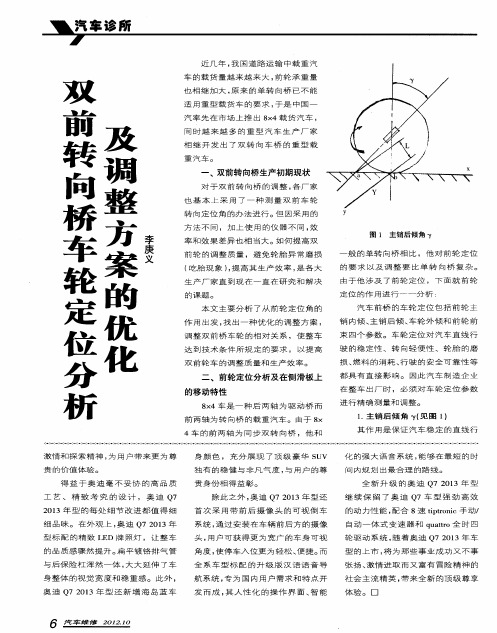
双前转向桥车轮定位分析及调整方案的优化
角度 , 停车入 位更 为轻 松 、 捷 。 使 便 而
全 系 车 型 标 配 的 升 级 版 汉 语 语 音 导 航 系 统 , 为 国 内 用 户 需 求 和 特 点 开 专 发 而 成 , 人 性 化 的 操 作 界 面 、 能 其 智
张 扬 、 情 进 取 而 又 富 有 冒 险 精 神 的 激
两 个 前 桥 都 是 非 独 立 悬 挂 桥 , 了前 除 轮 前束 之外 , 前 轮定位 角 都是 按设 其
计 要 求 ,在 生 产 加 工 中 完全 能保 证
其 测 试 和 调 整 方 法 是 : 将 双 前 先 轴 的前后 轮 用千 斤顶顶 起 , 转角仪 将 放 到 顶 起 的两 个 车 轮 下 , 后 将 两 个 然 车 轮 放 下 , 动 方 向 盘 , 两 个 前 后 转 使 转 向 轮 转 动 , 位 后 , 出 数 值 ( 细 回 测 仔 地 用 光 束 镜 分 辨 出 , 周 围 光 线 较 强 若 的 话 , 无 法 看 清 。) 复 几 次 才 能 依 则 反 次 测 出 两 个 前 转 向轮 的 车 轮 定 位 角 。
最 后 再 调 整 连 接 双 前 轴 的 第 一 过 渡
的 , 且我 们 实际 测 出的参 数 与设计 并 要 求 基 本 相 符 ,也 无 需 进 行 重 复测
得 益 于 奥 迪 毫 不 妥 协 的 高 品 质 工 艺 、 精 致 考 究 的 设 计 , 奥 迪 Q7 21 0 3年 型 的 每 处 细 节 改 进 都 值 得 细 细 品 味 。 在 外 观 上 , 迪 Q 0 3年 奥 72 1
贵 身份 相得益 彰 。 除 此 之 外 , 迪 Q7 2 1 奥 0 3年 型 还 首 次 采 用 带 前 后 摄 像 头 的 可 视 倒 车 系统 , 过 安装 在车 辆前 后方 的摄 像 通
四轮定位基本参数及其影响
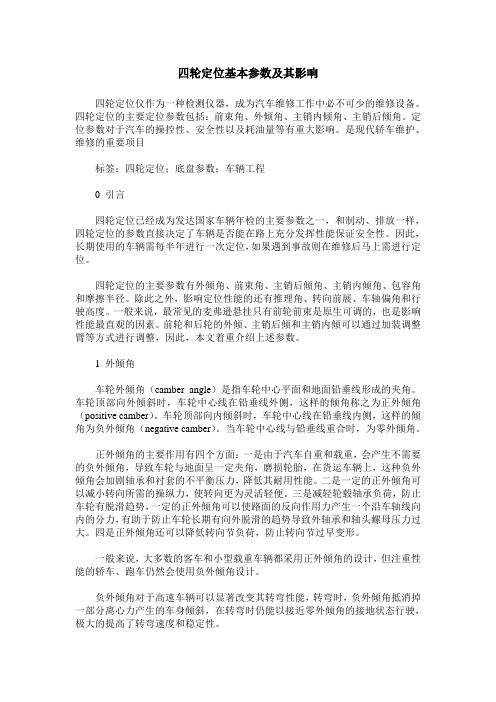
四轮定位基本参数及其影响四轮定位仪作为一种检测仪器,成为汽车维修工作中必不可少的维修设备。
四轮定位的主要定位参数包括:前束角、外倾角、主销内倾角、主销后倾角。
定位参数对于汽车的操控性、安全性以及耗油量等有重大影响。
是现代轿车维护、维修的重要项目标签:四轮定位;底盘参数;车辆工程0 引言四轮定位已经成为发达国家车辆年检的主要参数之一,和制动、排放一样,四轮定位的参数直接决定了车辆是否能在路上充分发挥性能保证安全性。
因此,长期使用的车辆需每半年进行一次定位,如果遇到事故则在维修后马上需进行定位。
四轮定位的主要参数有外倾角、前束角、主销后倾角、主销内倾角、包容角和摩擦半径。
除此之外,影响定位性能的还有推理角、转向前展、车轴偏角和行驶高度。
一般来说,最常见的麦弗逊悬挂只有前轮前束是原生可调的,也是影响性能最直观的因素。
前轮和后轮的外倾、主销后倾和主销内倾可以通过加装调整臂等方式进行调整,因此,本文着重介绍上述参数。
1 外倾角车轮外倾角(camber angle)是指车轮中心平面和地面铅垂线形成的夹角。
车轮顶部向外倾斜时,车轮中心线在铅垂线外侧,这样的倾角称之为正外倾角(positive camber)。
车轮顶部向内倾斜时,车轮中心线在铅垂线内侧,这样的倾角为负外倾角(negative camber)。
当车轮中心线与铅垂线重合时,为零外倾角。
正外倾角的主要作用有四个方面:一是由于汽车自重和载重,会产生不需要的负外倾角,导致车轮与地面呈一定夹角,磨损轮胎,在货运车辆上,这种负外倾角会加剧轴承和衬套的不平衡压力,降低其耐用性能。
二是一定的正外倾角可以减小转向所需的操纵力,使转向更为灵活轻便。
三是减轻轮毂轴承负荷,防止车轮有脱滑趋势,一定的正外倾角可以使路面的反向作用力产生一个沿车轴线向内的分力,有助于防止车轮长期有向外脱滑的趋势导致外轴承和轴头螺母压力过大。
四是正外倾角还可以降低转向节负荷,防止转向节过早变形。
汽车培训-气泡式前轮定位仪(DOC 6页).doc

气泡式前轮定位仪一、实验目的为什么要对汽车车轮进行定位?在第一节已经有了较为详细的讲解,在此不再重复描述。
目前汽车车轮定位使用的检测设备有气泡水准式车轮定位仪、光学式车轮定位仪、激光式车轮定位仪、电子式车轮定位仪和微机型车轮定位仪。
气泡水准仪由于结构简单、价格低廉、便于携带等优点,因而在国内获得了广泛的应用,但是也有安装、测试费时费力等缺点。
来自资料搜索网(www.天狼), 海量资料下载前轮定位参数的变化会导致轮胎与路面接触区的作用力或侧滑发生变化,它不但影响汽车乘车的舒适性,有时甚至危及行车安全。
因此,常采用前轮定位参数作为深入诊断参数,对前轮定位进行检测,并根据检测的数据进行维修。
现以气泡水准仪为例,介绍一下汽车的前轮定位。
二、实验内容前轮定位的检测,包括前轮前束、前轮外倾、主销后倾和主销内倾。
通过运用气泡式四轮定位仪对这些参数进行检测并对比汽车的标准值,对症下药地对汽车进行维修,以使汽车性能达到最佳。
三、实验前准备工作1、汽车技术状况的预测被检车的载荷应符合原厂规定;轮胎尺寸一致、轮胎气压应符合原厂规定值;前轮轮胎应为新胎或磨耗均匀的半新胎;检查前轮轮毂轴承间隙是否正常;检查转向节衬套与主销是否松旷;检查制动器是否可靠;加满油液。
2、检测场地的要求要求检测场地水平且平整。
检测时,应保证前后车轮接地面处于同一水平面上。
3、汽车的正确放置在汽车两前轮分别放在各自的转盘上之前,汽车应前后稍许推动,以便前轮自动处于直线行驶状态。
然后使两前轮分别放在各自的转角盘上,并使主销中心线的延长线基本上通过转角盘中心。
在有工厂标记的条件下,依工厂标记来确定转向器的中间位置,进而确定前轮的直线行驶位置,这样比较方便而且准确。
确定前轮直驶位置后,将转盘扇形刻度尺调整到零位,对准游动指针,然后固定。
当再转动转向盘时,前轮的转角可以从转角盘刻度尺上读取。
4、支架的安装5、轮毂变形的检查及补偿四、注意事项1、被检测车辆的状况应符合测量需要的条件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Measurement precision analysis of automobile steering axle
incHnation and caUbration apparatlls
XU Gu帆,sU j妣,HE Feng-j洒Lg,CHEN R0ng,DAl】tnn-gu0
(Tramc and Tmnsportation College,Jilin University,Changchun,Jilin l 30025.Chi咖)
DEFG表示水平面,四边形脚心相对水平面的夹角
y为主销后倾角.四边形£MⅣP为与主销垂直相交
的平面,该平面是刖胀平面以Jsr为轴转动主销内 倾届形成的,DE是车轮向右转动6时,垂直于转向节
轴线且在水平面内的线段,DF是车轮向左转动6 时,垂直于转向节轴线且在水平面内的线段,x,形 位于水平面内pJ.
sin。Dl =(tan 6tan卢一tan 7)cos n,lcos 6+tan y
(5)
令
』尺=(‘an yc。s 6¨an卢sin∞。1
L5=尸tan y
则式(5)可化为
Rsin∞l+cos∞l—S=O
移项并平方后可化为 (R2+1)sin 2∞l一2RSsin∞l+S2—1=O 再令
I黧1
L厂=Js2一l
invented and its precision is up to 30”. Experiments show that zero eI‘I.or and 1inear system ermr exist when SAI is tested by the four—wheel aligners.Metrical is error 18’when the kingpin obliquity is 15。and the system ermr increases as kingpin obliquity increases.The experimental results correspond to the theo— retical analysis well.
由式(6)可知主销内倾测量角>I∞为关于主
销内倾JB、主销后倾y、车轮水平转角6的函数,测量 结果受以上因素影响.
.
图3表示在车轮转角6=20。时,主销内倾的测 量误差,其中右下角为局部放大视图.图中l表示线 性模型;2—6分别表示主销后倾为200,15 o,100,5。 和Oo时传感器测量角与主销内倾的关系曲线.由图 3可知,随主销内倾p的增大,卢与>:∞的非线性关 系越显著,线性模型的测量误差增大.同时,主销后 倾的增大会使主销内倾测量误差减小,但并不能补 偿由于主销内倾的增大产生的误差.当主销后倾大 于lOo时,主销内倾在16.60时,测量误差已大于标 准中规定的±6’的范围.因此,主销内倾的测量结果 必须校准以保证测量精度.
1.1主销倾角测量原理 四轮定位仪测量主销倾角如图1所示.主销轴
线即是车轮转向时所绕的处于空间一般位置角度的 假想轴线.主销在汽车纵横两平面上的投影与车辆 支承平面的垂线所夹的锐角即为主销后倾y和主销 内倾口.四个传感器测量头通过夹具连接到轮辋上, 当车轮向左右各转动一定角度时,从车轮下方的转 角盘读出车轮转角.将测量头内部垂直布置的两倾 角传感器测得的角度依照测量模型计算可以得到主 销内倾和主销后倾.
第28卷第3期 2007年5月
江苏大学学报(自然科学版) Joumal of Jiangsu University(Natural science Edition)
V01.28 No.3 Mav 2007
汽车主销内倾测量精度分析及校准仪器
徐观,苏 建,何凤江,陈 熔,戴建国
(吉林大学交通学院,吉林长春130025)
3 主销倾角的校准理
为提高四轮定位仪测量主销倾角结果的准确 性,针对现有四轮定位仪检定装置不能对主销倾角 的测量结果进行正确检验的现状,提出了新的检定 模型并研发了一种四轮定位仪检定装置.
检定装置结构如图4,5所示,分别通过两个分 辨率为10”的高精度分度盘读取主销后倾及内倾的 数值y,卢,采用水平分度盘模拟检测过程中的车轮 转角6M’7。.针对不同四轮定位仪传感器具有相同装 夹方式的特点,采用高精度自定心卡盘装夹传感器 测量头,满足了各种四轮定位仪的需要.
苏建(1954一),男,内蒙古呼盟人,教授.博士生导师(sujian@jlu.edu.cn),主要从事车辆智能化诊断理论研究.
万方数据
210
江苏大学学报(自然科学版)
第28卷
假想轴线,无测量基准,主销倾角只能依靠近似线性 公式间接测量,会产生一定的理论误差.作者在四轮 定位仪标准制定过程中,建立了精确的主销内倾测 量模型,研究了现有模型的理论误差,提出了应用车 辆纵横两平面内主销后倾和内倾独立设定原则的检 定方法,研发了精度为30”的检定仪器,解决了无法 正确校准主销倾角的问题.
和前束.由于车轮主销是处于空间一般位置角度的
收稿日期:2006一12—25 基金项目:交通部行业标准《四轮定位仪》制订项目(Jrl2000一10);吉林大学“21l工程”建设基金资助项目(2000一033);长春市新星创
业计划资助项目(06xX02) 作者简介:徐观(1981一),男,吉林长春人,博士研究生(suji8n@jlu.edu.cn),主要从事汽车智能化检测研究.
1主销内倾精确测量模型的建立
册=等 s8mi∞吣I 2=而努2=百 警
电T‘W/ME=oW/oE得
丁’形=—_-——≯
(L 11 )J (2))
其中∞,为车轮右转时传感器测量角. J7l死E=^Ⅳ一E,=Rtan 6tan厣一尺tan y 由式(2)和(3)得
(3)
r’形=R(tan 6tan卢一tan y)cos∞I cos 6
Key words:SAI;caster;fou卜wheel aligner;eH.0r肌alysis;calibration
四轮定位仪是应用最为广泛的汽车车轮定位角 度检测设备,可检测车轮前束、车轮外倾、主销后倾 及内倾等重要定位参数,其测量的准确性将对行车
安全性和平顺性产生影响‘卜4|. 现有四轮定位仪的校准方法主要针对车轮外倾
obliquity, calibmtion method of kingpin obliquity is presented according to independent enactment principle in Vertical and traVerse sections of automobile. A calibration appamtus of four-wheel al培ners is
Fig.1
图1 四轮定位仪主销倾角检测 Kingpin o.bliquity test of fou卜wheel aligner
1.2主销内倾精确测量模型 以左前轮为例,建立主销内倾测量模型如图2
所示.戈oz面为汽车横平面,),oz面为汽车纵平面,戈oy 面为水平面.Dz为主销轴线,Dc为车轮转向节轴线 方向,0y为与车轮平面平行且水平的线段.四边形
令Dy=Dy’=D矿7=尺,y’r’=矿’r=yr,当 车轮向右转动6时,有
图2 主销内倾精确测量模型
Fig.2 Precise SAI measurement model
则有
y’形=y丁+r’形=R[tan y+(tan 6tan卢一
tan 7)cos∞I cos 6]
(4)
将式(4)代人式(1)得
三个分度盘的轴线、卡盘轴线及主销轴线五轴 需相交于一点,实现了运动轨迹要求.为在汽车纵横 平面分别得到正确的主销投影,运用两个转动轴线 相互垂直且可通过分度盘独立驱动的导轨设定主销
Fig.5
图5检定装置虚拟样机 Virtual pmtotype of calibmtion apparatus
该检定装置创新之处在于能够避免理论误差并 实现对四轮定位仪测量主销后倾和内倾的直接校 准,提出了在汽车纵横两平面主销倾角独立设定的 四轮定位仪检定原则,开发了相应的检定机构;利用 水平分度盘上的拨叉实现了将水平面的角位移转化 为绕主销转角的目的.
摘要:为解决四轮定位仪测量主销内倾的精度问题,建立了精确的内倾测量模型.分析了主销内倾
与传感器测量角间的非线性关系以及主销后倾变化等因素对主销内倾测量精度的影响.讨论了测
量误差的分布趋势,当主销倾角大于100时线性模型测量误差大于10’.针对无法校准主销倾角测
量结果的现状,提出了在汽车纵横两平面内主销倾角独立生成的检定原则,研发了精度达到30”的
f
图4四轮定位仪检定装置结构
< 基
F培.4 Stmcture of fou卜wheel aligner calibration apparatus
翟
骞 +H
主销内倾测量角/(。)
图3 主销内倾与传感器测量角关系
Fig.3 Relationship of SAI and sensor 7s angle
Abstract:Precise metrical model of steering axle inclination(SAI)is built for analyzing the fou卜wheel
aligners’metrical ermr. The nonlinear relationship between SAI and sensor’s measurement angle,and change of caster which afkcts the measurement precision are analyzed based on the model.It shows that metrical ermr is more than 10’when kingpin obliquity is over 10。.Tb calibmte metrical result of kingpin