51单片机控制数码管动态显示程序
基于51单片机的led数码管动态显示
基于51单片机的LED数码管动态显示LED数码管动态显示就是一位一位地轮流点亮各位数码管,对于每一位LED数码管来说,每隔一段时间点亮一次,利用人眼的“视觉暂留"效应,采用循环扫描的方式,分时轮流选通各数码管的公共端,使数码管轮流导通显示。
当扫描速度达到一定程度时,人眼就分辨不出来了。
尽管实际上各位数码管并非同时点亮,但只要扫描的速度足够快,给人的印象就是一组稳定的显示数据,认为各数码管是同时发光的。
若数码管的位数不大于8位时,只需两个8位I/O口。
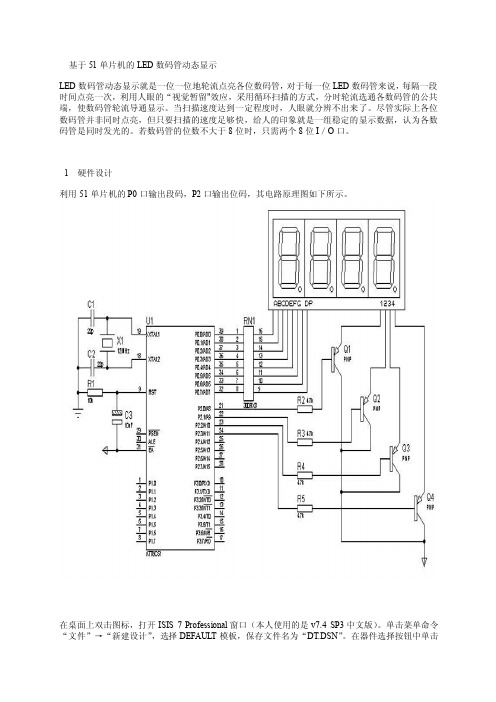
1 硬件设计利用51单片机的P0口输出段码,P2口输出位码,其电路原理图如下所示。
在桌面上双击图标,打开ISIS 7 Professional窗口(本人使用的是v7.4 SP3中文版)。
单击菜单命令“文件”→“新建设计”,选择DEFAULT模板,保存文件名为“DT.DSN”。
在器件选择按钮中单击“P”按钮,或执行菜单命令“库”→“拾取元件/符号”,添加如下表所示的元件。
51单片机A T89C51 一片晶体CRYSTAL 12MHz 一只瓷片电容CAP 22pF 二只电解电容CAP-ELEC 10uF 一只电阻RES 10K 一只电阻RES 4.7K 四只双列电阻网络Rx8 300R(Ω) 一只四位七段数码管7SEG-MPX4-CA一只三极管PNP四只若用Proteus软件进行仿真,则上图中的晶振和复位电路以及U1的31脚,都可以不画,它们都是默认的。
在ISIS原理图编辑窗口中放置元件,再单击工具箱中元件终端图标,在对象选择器中单击POWER 和GROUND放置电源和地。
放置好元件后,布好线。
左键双击各元件,设置相应元件参数,完成电路图的设计。
2 软件设计LED数码管动态显示是一位一位地轮流点亮各位数码管的,因此要考虑每一位点亮的保持时间和间隔时间。
保持时间太短,则发光太弱而人眼无法看清;时间太长,则间隔时间也将太长(假设N位,则间隔时间=保持时间X(N-1)),使人眼看到的数字闪烁。
基于51单片机的74HC164驱动六位数码管显示程序与仿真

P2=0xff; //数码"灭"
}
}
main()
{
separateData(123456);
while(1)
{
display();
}
}
DS_data[2]=dat/100%10;
DS_data[3]=d4]=dat/10000%10;
DS_data[5]=dat/100000%10;
}
void write_164(unsigned char dat)
{
unsigned char i;
for(i=0;i<8;i++)
sbit MOSI=P1^1;//符号DSA引脚1数据输入符号DSB引脚2数据输入
unsigned char code Tab[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,
0x7F,0x6F,0x77,0x7C,0x39,0x5E,0x79,0x71};//共阴数码管
基于51单片机的74HC164驱动六位数码管显示程序与仿真
#include<reg52.h>
#include<intrins.h>
#define uchar unsigned char
#define uint unsigned int
//74HC164
sbit CLK=P1^0;//符号CP引脚8时钟输入(低电平到高电平边沿触发)
void delay1ms()
{
unsigned char i,j;
for(i=0;i<10;i++)
for(j=0;j<33;j++)
51单片机键盘数码管显示_利用8255和51单片机实现数码管显示按键数值的程序(带程序)

期中大作业学院:物理与电子信息工程学院课题:【利用8255和51单片机实现数码管显示按键数值的程序】要求:【4*4矩阵键盘,按0到15,数码管上分别显示0~9,A~F】芯片资料:8255:8255是Intel公司生产的可编程并行I/O接口芯片,有3个8位并行I/O口。
具有3个通道3种工作方式的可编程并行接口芯片(40引脚)。
其各口功能可由软件选择,使用灵活,通用性强。
8255可作为单片机与多种外设连接时的中间接口电路。
8255作为主机与外设的连接芯片,必须提供与主机相连的3个总线接口,即数据线、地址线、控制线接口。
同时必须具有与外设连接的接口A、B、C口。
由于8255可编程,所以必须具有逻辑控制部分,因而8255内部结构分为3个部分:与CPU连接部分、与外设连接部分、控制部分。
8255特性:1.一个并行输入/输出的LSI芯片,多功能的I/O器件,可作为CPU总线与外围的接口。
2.具有24个可编程设置的I/O口,即3组8位的I/O口,分别为PA口、PB口和PC 口。
它们又可分为两组12位的I/O口:A组包括A口及C口(高4位,PC4~PC7),B组包括B口及C口(低4位,PC0~PC3)。
A组可设置为基本的I/O口,闪控(STROBE)的I/O闪控式,双向I/O三种模式;B组只能设置为基本I/O或闪控式I/O两种模式,而这些操作模式完全由控制寄存器的控制字决定.引脚说明RESET:复位输入线,当该输入端处于高电平时,所有内部寄存器(包括控制寄存器)均被清除,所有I/O口均被置成输入方式。
CS:芯片选择信号线,当这个输入引脚为低电平时,即CS=0时,表示芯片被选中,允许8255与CPU进行通讯;CS=1时,8255无法与CPU做数据传输。
RD:读信号线,当这个输入引脚为低电平时,即CS=0且RD=0时,允许8255通过数据总线向CPU发送数据或状态信息,即CPU从8255读取信息或数据。
WR:写入信号,当这个输入引脚为低电平时,即CS=0且WR=0时,允许CPU将数据或控制字写入8255。
数码显示控制实验报告(3篇)
第1篇一、实验目的1. 熟悉数码显示模块的结构和工作原理;2. 掌握51单片机控制数码显示模块的方法;3. 学会使用移位寄存器实现数码显示的动态扫描;4. 提高单片机编程能力和实践操作能力。
二、实验原理数码显示模块是一种常见的显示器件,主要由7段LED组成,可以显示0-9的数字以及部分英文字符。
51单片机通过控制数码显示模块的段选和位选,实现数字的显示。
移位寄存器是一种常用的数字电路,具有数据串行输入、并行输出的特点。
在本实验中,使用移位寄存器74HC595实现数码显示的动态扫描。
三、实验仪器与材料1. 51单片机实验板;2. 数码显示模块;3. 移位寄存器74HC595;4. 电阻、电容等电子元件;5. 电路连接线;6. 编译软件Keil uVision;7. 仿真软件Proteus。
四、实验步骤1. 电路连接(1)将51单片机的P1口与数码显示模块的段选端相连;(2)将74HC595的串行输入端Q(引脚14)与单片机的P0口相连;(3)将74HC595的时钟端CLK(引脚11)与单片机的P3.0口相连;(4)将74HC595的锁存端LR(引脚12)与单片机的P3.1口相连;(5)将数码显示模块的位选端与74HC595的并行输出端相连。
2. 编写程序(1)初始化51单片机的P1口为输出模式,P3.0口为输出模式,P3.1口为输出模式;(2)编写数码显示模块的段码数据表;(3)编写74HC595的移位和锁存控制函数;(4)编写数码显示模块的动态扫描函数;(5)编写主函数,实现数码显示模块的循环显示。
3. 编译程序使用Keil uVision编译软件将编写的程序编译成hex文件。
4. 仿真实验使用Proteus仿真软件进行实验,观察数码显示模块的显示效果。
五、实验结果与分析1. 编译程序后,将hex文件下载到51单片机实验板上;2. 使用Proteus仿真软件进行实验,观察数码显示模块的显示效果;3. 通过实验验证,数码显示模块可以正常显示0-9的数字以及部分英文字符;4. 通过实验,掌握了51单片机控制数码显示模块的方法,学会了使用移位寄存器实现数码显示的动态扫描。
51单片机数码管显示0到99实验原理
51单片机数码管显示0到99实验原理51单片机是一种常用的单片机微控制器,它可以用来完成各种控制任务,包括数码管显示。
数码管是一种显示器件,可以用来显示数字、字母或符号等。
在本实验中,我们将使用51单片机控制数码管显示从0到99的数字。
实验原理如下:1. 51单片机介绍:51单片机是一种基于Intel 8051架构的微控制器。
它是一种具有48KB的程序存储器和52个输入/输出引脚的芯片。
单片机通过内部时钟和逻辑电路来执行各种任务。
2.数码管介绍:数码管是一种由LED组成的显示器件。
一般用于显示数字,通过控制LED的亮灭来显示不同的数字。
常见的数码管有共阳极和共阴极两种类型。
3.共阳极数码管原理:共阳极数码管的原理是通过控制不同的引脚来点亮相应的LED。
在显示数字0到9时,需要同时点亮特定的LED。
通过控制引脚为高电平来点亮对应的LED,其他引脚保持低电平。
4.共阴极数码管原理:共阴极数码管的原理与共阳极相反,需要使引脚为低电平来点亮相应的LED。
其他引脚保持高电平。
5. 51单片机控制数码管原理:通过设置51单片机的输出引脚和电平,可以控制数码管的显示。
首先需要将数码管的引脚连接到51单片机的输出引脚上,并设置相应的输出模式和电平。
然后通过程序来控制输出引脚的电平,从而控制数码管的亮灭。
实验步骤如下:1.连接电路:首先将51单片机与数码管进行连接。
根据具体的实验条件,选择合适的数码管和电路图。
2.编写程序:使用51单片机的编程软件(如Keil C等),编写控制数码管的程序。
程序应该包括初始化引脚、设置输出模式和控制引脚电平等内容。
3.烧录程序:将编写好的程序烧录到51单片机的程序存储器中。
通过编程软件将程序下载到单片机中。
4.检查电路:验证电路连接是否正确。
可以通过使用示波器或万用表等工具来检查引脚的电平和波形。
5.运行实验:将电路通电,观察数码管的显示效果。
通过控制程序中的循环和延时等参数,可以实现数字的滚动显示、闪烁显示等效果。
基于51单片机实现LED数码管静态与动态显示的设计浅析
33第2卷 第22期产业科技创新 2020,2(22):33~34Industrial Technology Innovation 基于51单片机实现LED数码管静态与动态显示的设计浅析龙 志(广州大学松田学院,广州 增城 511370)摘要:随着社会的发展,在我们日常的生活中,数码管的应用随处可见,尤其是在电子应用设计显示等方面常常发挥着非常重要的作用,因此研究数码管的显示有非常重要的现实意义。
数码管我们可以分为静态显示和动态显示,这两种显示有着本质的区别,静态显示的特点是占用CPU 时间少,显示便于监测和控制,显示字形稳定,而动态数码管的显示,效果相对静态显示亮度差少许,但成本较低。
本设计主要是基于51单片机,先通过结合集成芯片74HC573对LED 数码管静态显示的硬件电路设计与分析,进一步拓展到采用芯片74HC138与LED 数码管动态显示的硬件电路设计与分析,最终实现两种不同的电路设计显示的方法。
关键词:LED 数码管;静态显示;动态显示;51单片机中图分类号:TP368.12 文献标识码:A 文章编号:2096-6164(2020)22-0033-02随着电子应用技术的不断发展,显示电路在电子设计应用方面更加广泛,尤其是LED 数码管显示在各行各业中的应用更加重要,如红绿交通灯显示,电子时钟显示,家电产品功能显示等方面都需要用到LED 数码管作为显示。
因此,对LED 数码管的显示控制有着非常重要的现实意义。
因此我们要实现LED 数码管的熟练显示控制,我们必须要根据数码管的特点来进行分析和设计,数码管有静态显示和动态显示的两种方法,接下对这两种电路作详细的分析与设计,最终实现对LED 数码管静态与动态的两种不同显示设计方法。
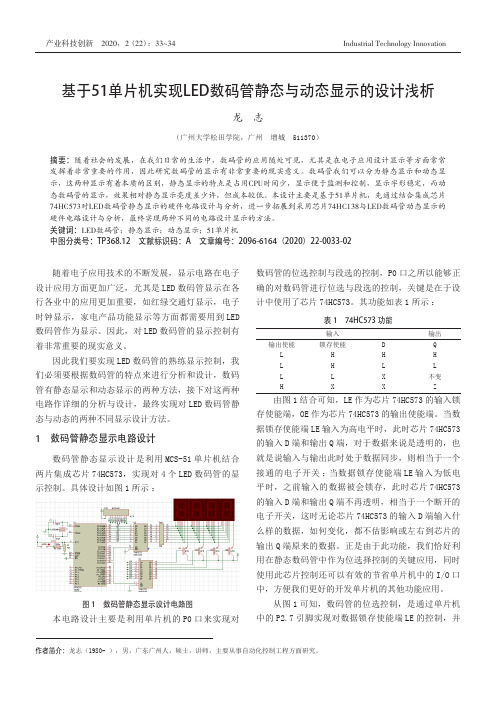
1 数码管静态显示电路设计数码管静态显示设计是利用MCS-51单片机结合两片集成芯片74HC573,实现对4个LED 数码管的显示控制。
具体设计如图1所示:图1 数码管静态显示设计电路图本电路设计主要是利用单片机的P0口来实现对数码管的位选控制与段选的控制,P0口之所以能够正确的对数码管进行位选与段选的控制,关键是在于设计中使用了芯片74HC573。
51单片机数码管显示程序设计
练习3主程序参考:
ORG 0000H LJMP START ORG 000BH LJMP T0SERV ;T0中断入口 ORG 0030H START: MOV SP,#50H ;初始化堆栈 LCALL INIT ;初始化 MOV DISBUF,#0 MOV DISBUF+1,#1 MOV DISBUF+2,#2 MOV DISBUF+3,#3 MOV DISBUF+4,#4 MOV DISBUF+5,#0 MOV FLASH,#11000000B MOV R0,#0 LOOP: MOV DISBUF+5,R0 LCALL DELAY INC R0 CJNE R0,#10,LOOP MOV R0,#0 AJMP LOOP
恢复现场
返回
动态显示参考程序1:定义变量
;--------------------------------------------------------;动态显示程序 ;--------------------------------------------------------;全局变量定义 FLAG EQU 20H ;标志位 DISSEG EQU P0 ;显示段驱动 DISBIT EQU P2 ;显示位驱动P2.7-P2.2 DISBUF EQU 21H ;显示缓冲区首地址21H-26H DISBITBUF EQU 27H ;当前显示位计数器0-5 FLASH EQU 28H ;闪烁控制xxxxxx00,将x=1闪烁,=0不闪 ;小数点的处理: ;若显示‘3’,缓冲区放‘3’,若显示‘3.’,缓冲区放‘3+80H’, 最高位为1 S_PULSE EQU FLAG.0 ;秒脉冲 CNT_2D5MS EQU 2FH ;2.5MS计数器 CNT_10MS1 EQU 30H ;10MS计数器 CN_0D5S EQU 31H ;0.5秒计数器 ;----------------------------------------------------------
郭天祥单片机教学LESSON4数码管动态显示优秀课件.ppt

主程序
中断响应
中断请求
执行主 程序
断点
继续执行 主程序
执行 中断 处理 程序
中断返回
4.1 80C51中断的控制
一、中断允许控制
CPU对中断系统所有中断以及某个中断源的开放和屏 蔽是由中断允许寄存器IE控制的。
▪EX0(IE.0),外部中断0允许位; ▪ET0(IE.1),定时/计数器T0中断允许位; ▪EX1(IE.2),外部中断0允许位; ▪ET1(IE.3),定时/计数器T1中断允许位; ▪ES(IE.4),串行口中断允许位; ▪EA (IE.7), CPU中断允许(总允许)位。
▪TF1(TCON.7):T1溢出中断请求标志位。T1计数溢出时由硬件自 动置TF1为1。CPU响应中断后TF1由硬件自动清0。T1工作时,CPU 可随时查询TF1的状态。所以,TF1可用作查询测试的标志。TF1也可 以用软件置1或清0,同硬件置1或清0的效果一样。 ▪TR1(TCON.6):T1运行控制位。TR1置1时,T1开始工作;TR1置 0时,T1停止工作。TR1由软件置1或清0。所以,用软件可控制定时/ 计数器的启动与停止。 ▪TF0(TCON.5):T0溢出中断请求标志位,其功能与TF1类同。 ▪TR0(TCON.4):T0运行控制位,其功能与TR1类同。
TL0
TCON
TF1 TR1 TF0 TR0 GATE C/T M1 M0 GATE C/T M1 M0
外部中断相关位
T1方式
内部总线 TMOD T0方式
4.2.2 定时/计数器的控制
80C51单片机定时/计数器的工作由两个特殊功 能寄存器控制。TMOD用于设置其工作方式; TCON用于控制其启动和中断申请。
51单片机hc595控制一位数码管
/*用hc595控制数码管,显示键盘的值*/#include<reg52.h>#define unchar unsigned char#define unint unsigned intunchar temp,num;sbit scl=P3^6;sbit sda=P3^4;sbit rclk=P3^5; //寄存器时钟unchar code table[]={0x40,0xf9,0x24,0x30,0x99,0x12,0x02,0xf8,0x00,0x10,0xbf,0xb9,0xb6,0}; //数码管编码void delay1()//短延时{;;}void delay(int z) //长延时{int a,b;for(a=0;a<110;a++)for(b=0;b<z;b++);}void init()//初始化{scl=1;sda=1;rclk=0;}void start()//开始条件{scl=1;delay1();sda=1;delay1();sda=0;delay1();}void stop()//停止{scl=1;delay1();sda=0;delay1();sda=1;delay1();}void write(unsigned char temp)//写{int i;start();for(i=0;i<8;i++){scl=0;rclk=0;delay1();sda=(bit)(temp&0x80);delay1();scl=1;delay1();delay1();temp<<=1;} rclk=1;stop();}//键盘扫描unchar scan(){// unchar num,temp;// num=17;P2=0xfd;temp=P2;temp=temp&0xf0;while(temp!=0xf0){P2=0xfd;temp=P2;temp=temp&0xf0;delay(10);while(temp!=0xf0){temp=P2;temp=temp&0xf0;switch(temp){case 0xe0:num=1;break;case 0xd0:num=2;break;case 0xb0:num=3;break;case 0x70:num=4;break;}while(temp!=0xf0){temp=P2;temp=temp&0xf0;}// display(num-1);}}P2=0xfb;temp=P2;temp=temp&0xf0;while(temp!=0xf0){P2=0xfb;temp=P2;temp=temp&0xf0;delay(10);while(temp!=0xf0){temp=P2;switch(temp){case 0xeb:num=5;break;case 0xdb:num=6;break;case 0xbb:num=7;break;case 0x7b:num=8;break;}while(temp!=0xf0){temp=P2;temp=temp&0xf0;}//display(num-1);}}P2=0xf7;temp=P2;temp=temp&0xf0;while(temp!=0xf0){P2=0xf7;temp=P2;temp=temp&0xf0;delay(10);while(temp!=0xf0){temp=P2;switch(temp){case 0xe7:num=9;break;case 0xd7:num=10;break;case 0xb7:num=11;break;case 0x77:num=12;break;}while(temp!=0xf0){temp=P2;temp=temp&0xf0;}// display(num-1);//delay(100);}}return num;}/*void display(unchar num) {P0=table[num-1];delay(10);} */void main()//主函数{init();delay1();while(1)//大循环{write(table[scan()]);}}。
51单片机数码管显示时钟程序
#include〈reg52.h〉//#include#include<intrins。
h〉#define uchar unsigned char#define uint unsigned intsbit dula=P2^6;sbit wela=P2^7;sbit key1=P3^4;sbit key2=P3^5;sbit key3=P3^6;sbit beep=P2^3;unsigned code table[]={0x3f ,0x06 ,0x5b , 0x4f ,0x66 ,0x6d ,0x7d ,0x07 ,0x7f ,0x6f ,0x77 ,0x7c,0x39 , 0x5e , 0x79 ,0x71};uchar num1,num2,s,s1,m,m1,f,f1,num,numf,nums,dingshi;uchar ns,ns1,nf,nf1,numns,numnf;void delay(uint z);void keyscan ();void keyscan1 ();void alram();void display(uchar m,uchar m1,uchar f,ucharf1,uchars,uchars1); void display0(uchar nf,uchar nf1,uchar ns,uchar ns1);void main(){TMOD=0x01;//设定定时器0工作方式1TH0=(65536—46080)/256 ;TL0=(65536—46080)%256 ;EA=1;//开总中断ET0=1;//开定时器0中断TR0=1;//启动定时器0中断numns=12;numnf=0;while(1){if(dingshi==0){keyscan ();display(m,m1,f,f1,s,s1);alram();}else{keyscan1 ();display0(nf,nf1,ns,ns1);}}}void keyscan (){if(key1==0){delay(10);if(key1==0)nums++;if (nums==24)nums=0;while(!key1);display(m,m1,f,f1,s,s1);}if(key2==0){delay(10);if(key2==0)numf++;if (numf==60)numf=0;while(!key2);display(m,m1,f,f1,s,s1);}if(key3==0){delay(10);if(key3==0){dingshi=~dingshi;while(!key3)display(m,m1,f,f1,s,s1);}}/*if(key4==0){delay(10);if(key4==0){flag=1;while(!key4);display(m,m1,f,f1,s,s1);}}*/}void keyscan1(){if(key1==0){delay(10);if(key1==0)numns++;if (numns==24)numns=0;while(!key1);// display(nf,nf1,ns,ns1);}if(key2==0){delay(10);if(key2==0)numnf++;if (numnf==60)numnf=0;while(!key2);// display(nf,nf1,ns,ns1);}if(key3==0){delay(10);if(key3==0){dingshi=0;while(!key3);// display(m,m1,f,f1,s,s1);}}}void alram(){if((numnf==numf)&&(numns==nums))beep=0;if(((numnf+1==numf)&&(numns==nums))&&(dingshi==0))//一分钟报时提示beep=1;}void display0(uchar nf,uchar nf1,uchar ns,uchar ns1)//闹钟显示函数{nf=numnf%10;nf1=numnf/10;ns=numns%10;ns1=numns/10;/*wela=1;P0=0xc0;//送位选数据wela=0;P0=0xff;*/dula=1;P0=table[ns1];dula=0;P0=0xff;wela=1;P0=0xfe;wela=0;delay(1);dula=1;P0=table[ns]|0x80;dula=0;wela=1;P0=0xfd;wela=0;delay(1);dula=1;P0=table[nf1];dula=0;P0=0xff;wela=1;P0=0xfb;wela=0;delay(1);dula=1;P0=table[nf];dula=0;P0=0xff;wela=1;P0=0xf7;wela=0;delay(1);}void display(uchar m,uchar m1,uchar f,ucharf1,uchars,uchars1) //时间显示{dula=1;P0=table[m1];//秒位第1位dula=0;P0=0xff;wela=1;P0=0xef;wela=0;delay(1);dula=1;P0=table[m];// 秒位第2位dula=0;P0=0xff;wela=1;wela=0;delay(1);dula=1;P0=table[s1]; //时位第一位dula=0;P0=0xff;wela=1;P0=0xfe;wela=0;delay(1);dula=1;P0=table[s]|0x80;dula=0;P0=0xff;wela=1;P0=0xfd;wela=0;delay(1);dula=1;P0=table[f1];//分位第一位dula=0;P0=0xff;wela=1;P0=0xfb;wela=0;delay(1);dula=1;P0=table[f]|0x80;dula=0;P0=0xff;wela=1;P0=0xf7;wela=0;delay(1);}void T0_timer() interrupt 1{TH0=(65536—46080)/256 ;TL0=(65536—46080)%256 ;num2++;if(num2==20){num++;num2=0;m=num%10;m1=num/10;f=numf%10;f1=numf/10;s=nums%10;s1=nums/10;if(num==59){num=0;numf++;if(numf==59){numf=0;nums++;}if (nums==24)nums=0;}}}void delay(uint z){uint x,y;for(x=110;x〉0;x—-)for(y=z;y>0;y—-);}。
以51单片机为核心的DS18B20的数码管显示温度程序+Proteus仿真
//DS18B20的读写程序,数据脚P3.3 ////温度传感器18B20汇编程序,采用器件默认的12位转化////最大转化时间750微秒,显示温度-55到+125度,显示精度////为0.1度,显示采用4位LED共阳显示测温值////P0口为段码输入,P24~P27为位选///***************************************************/#include "reg51.h"#include "intrins.h" //_nop_();延时函数用#define Disdata P0 //段码输出口#define discan P2 //扫描口#define uchar unsigned char#define uint unsigned intsbit DQ=P3^3; //温度输入口sbit DIN=P0^7; //LED小数点控制uint h;uchar flag;//**************温度小数部分用查表法***********//uchar code ditab[16]={0x00,0x01,0x01,0x02,0x03,0x03,0x04,0x04,0x05,0x06,0x06,0x07,0x08,0x08,0x09,0x09};//uchar code dis_7[12]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff,0xbf};//共阳LED段码表"0" "1" "2" "3" "4" "5" "6" "7" "8" "9" "不亮" "-" uchar code scan_con[4]={0x7f,0xbf,0xdf,0xef}; //列扫描控制字uchar data temp_data[2]={0x00,0x00}; //读出温度暂放uchar data display[5]={0x00,0x00,0x00,0x00,0x00}; //显示单元数据,共4个数据和一个运算暂用///////***********11微秒延时函数**********///void delay(uint t){for(;t>0;t--);}///***********显示扫描函数**********/scan(){char k;for(k=0;k<4;k++) //四位LED扫描控制{Disdata=0xff;Disdata=dis_7[display[k]];if(k==1){DIN=0;}discan=scan_con[k];delay(90);discan=0xff;}}/////***********18B20复位函数**********/ow_reset(void){char presence=1;while(presence){while(presence){DQ=1;_nop_();_nop_();DQ=0; //delay(50); // 550usDQ=1; //delay(6); // 66uspresence=DQ; // presence=0继续下一步}delay(45); //延时500uspresence = ~DQ;}DQ=1;}/////**********18B20写命令函数*********///向1-WIRE 总线上写一个字节void write_byte(uchar val){uchar i;for (i=8; i>0; i--) //{DQ=1;_nop_();_nop_();DQ = 0;_nop_();_nop_();_nop_();_nop_();_nop_();//5us DQ = val&0x01; //最低位移出delay(6); //66usval=val/2; //右移一位}DQ = 1;delay(1);}///*********18B20读1个字节函数********///从总线上读取一个字节uchar read_byte(void){uchar i;uchar value = 0;for (i=8;i>0;i--){DQ=1;_nop_();_nop_();value>>=1;DQ = 0; //_nop_();_nop_();_nop_();_nop_(); //4usDQ = 1;_nop_();_nop_();_nop_();_nop_(); //4us if(DQ)value|=0x80;delay(6); //66us}DQ=1;return(value);}///***********读出温度函数**********///read_temp(){ow_reset(); //总线复位write_byte(0xCC); // 发Skip ROM命令write_byte(0xBE); // 发读命令temp_data[0]=read_byte(); //温度低8位temp_data[1]=read_byte(); //温度高8位ow_reset();write_byte(0xCC); // Skip ROMwrite_byte(0x44); // 发转换命令}///***********温度数据处理函数**********/ void work_temp(){uchar n=0;uchar doth,dotl;uchar flag3=1,flag2=1; //数字显示修正标记if((temp_data[1]&0xf8)!=0x00){temp_data[1]=~(temp_data[1]);temp_data[0]=~(temp_data[0])+1;n=1;flag=1;}//负温度求补码if(temp_data[0]>255){temp_data[1]++;}display[4]=temp_data[0]&0x0f;display[0]=ditab[display[4]];doth=display[0]/10;dotl=display[0]%10;display[4]=((temp_data[0]&0xf0)>>4)|((temp_data[1]&0x07)<<4); display[3]=display[4]/100;display[2]=display[4]/10%10;display[1]=display[4]%10;if(!display[3]){display[3]=0x0a;flag3=0;if(!display[2]){display[2]=0x0a;flag2=0;}}//最高位为0时都不显示if(n){display[3]=0x0b;//负温度时最高位显示"-"flag3=0;}}/////**************主函数****************/main(){Disdata=0xff; //初始化端口discan=0xff;for(h=0;h<4;h++){display[h]=8;}//开机显示8888ow_reset(); // 开机先转换一次write_byte(0xCC); // Skip ROMwrite_byte(0x44); // 发转换命令for(h=0;h<500;h++){scan();} //开机显示"8888"2秒while(1){read_temp(); //读出18B20温度数据work_temp(); //处理温度数据scan(); //显示温度值2秒}}////*********************结束**************************//。
51单片机四位一体共阳数码管程序
1.四位一体数码管的第一个数码管显示8 #include<reg52.h>sbit dula=P2^6;sbit wela=P2^7;void main(){wela=1;P0=0x01;wela=0;dula=1;P0=0x80;dula=0;while(1);}2.四位数码管同时从0到F变化#include<reg52.h>#define uchar unsigned char#define uint unsigned intsbit dula=P2^6;sbit wela=P2^7;uchar num;uchar code table[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x98,0x83,0xc6,0xa1,0x86,0x8e};void delayms(uint);void main(){wela=1;P0=0x0f;wela=0;while(1){for(num=0;num<16;num++){dula=1;P0=table[num];dula=0;delayms(500);}}}void delayms(uint xms){uint i,j;for(i=xms;i>0;i--)for(j=110;j>0;j--);}3.四位数码管分别以1,2,3,4进行循环显示#include<reg52.h>#define uchar unsigned char#define uint unsigned intsbit dula=P2^6;sbit wela=P2^7;uchar code table[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x98,0x83,0xc6,0xa1,0x86,0x8e};void delayms(uint);void main(){while(1){dula=1;P0=table[1];dula=0;P0=0x00; //送段选数据前关闭所有显示,防止打开位选wela=1; //锁存器时原来段选数据通过位选锁存器造成混乱P0=0x01;wela=0;delayms(500);dula=1;P0=table[2];dula=0;P0=0x00;wela=1;P0=0x02;wela=0;delayms(500);dula=1;P0=table[3];dula=0;P0=0x00;wela=1;P0=0x04;wela=0;delayms(500);dula=1;P0=table[4];dula=0;P0=0x00;wela=1;P0=0x08;wela=0;delayms(500);}}void delayms(uint xms) {uint i,j;for(i=xms;i>0;i--)for(j=110;j>0;j--); }。
数码管显示实验报告
一、实验目的1. 理解数码管的工作原理及驱动方式。
2. 掌握51单片机控制数码管显示的基本方法。
3. 学会使用动态扫描显示技术实现多位数码管的显示。
4. 提高编程能力和实践操作能力。
二、实验原理数码管是一种常用的显示器件,它由多个发光二极管(LED)组成,可以显示数字、字母或其他符号。
根据LED的连接方式,数码管可分为共阴极和共阳极两种类型。
本实验使用的是共阳极数码管。
51单片机控制数码管显示的基本原理是:通过单片机的I/O口输出高低电平信号,控制数码管的各个段(a-g)的亮灭,从而显示相应的数字或符号。
动态扫描显示技术是将多个数码管连接到单片机的I/O口,通过快速切换各个数码管的显示状态,实现多位数码管的显示。
三、实验器材1. 51单片机实验板2. 共阳极数码管3. 电阻、电容等元件4. 仿真软件(如Proteus)5. 编译器(如Keil)四、实验步骤1. 搭建电路:按照实验原理图连接51单片机、数码管和电阻等元件。
2. 编写程序:使用Keil软件编写控制数码管显示的程序。
程序主要包括以下部分:a. 初始化:设置单片机的工作状态,配置I/O口等。
b. 显示函数:根据需要显示的数字或符号,控制数码管的各个段亮灭。
c. 动态扫描函数:实现多位数码管的动态显示。
3. 编译程序:将编写好的程序编译成机器码。
4. 仿真测试:使用Proteus软件对程序进行仿真测试,观察数码管的显示效果。
5. 实验验证:将程序烧录到51单片机实验板上,进行实际测试。
五、实验结果与分析1. 实验结果:通过仿真测试和实际测试,数码管能够正确显示0-9的数字。
2. 结果分析:实验结果表明,51单片机可以成功地控制数码管显示数字。
动态扫描显示技术能够有效地实现多位数码管的显示,提高了显示效率。
六、实验总结1. 通过本次实验,我们掌握了51单片机控制数码管显示的基本方法,提高了编程能力和实践操作能力。
2. 动态扫描显示技术能够有效地实现多位数码管的显示,提高了显示效率。
51单片机(四位数码管的显示)程序
51单片机(四位数码管的显示)程序基于单片机V1或V2实验系统,编写一个程序,实现以下功能:1)首先在数码管上显示“P_ _ _”4个字符;2)等待按键,如按了任何一个键,则将这4个字符清除,改为显示“0000”4个字符(为数字的0)。
最佳答案下面这个程序是4x4距阵键盘,LED数码管显示,一共可以到0-F显示,你可以稍微改一下就可以实现你的功能了,如还有问题请发信息,希望能帮上你!#include<at89x52.h>unsigned char codeDig[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1 ,0x86,0x8e}; //gongyang数码管0-F 代码unsigned char k; //设置全局变量k 为键盘的键值/************************************键盘延时函数****************************/void key_delay(void) //延时函数{int t;for(t=0;t<500;t++);}/************************************键盘扫描函数******************************/void keyscan(void) //键盘扫描函数{unsigned char a;P2 = 0xf0; //键盘初始化if(P2!=0xf0) //有键按下?{key_delay(); //延时if(P2!=0xf0) //确认真的有键按下?{P2 = 0xfe; //使行线P2.4为低电平,其余行为高电平key_delay();a = P2; //a作为缓存switch (a) //开始执行行列扫描{case 0xee:k=15;break;case 0xde:k=11;break;case 0xbe:k=7;break;case 0x7e:k=3;break;default:P2 = 0xfd; //使行线P2.5为低电平,其余行为高电平a = P2;switch (a){case 0xed:k=14;break;case 0xdd:k=10;break;case 0xbd:k=6;break;case 0x7d:k=2;break;default:P2 = 0xfb; //使行线P2.6为低电平,其余行为高电平a = P2;switch (a){case 0xeb:k=13;break;case 0xdb:k=9;break;case 0xbb:k=5;break;case 0x7b:k=1;break;default:P2 = 0xf7; //使行线P2.7为低电平,其余行为高电平a = P2;switch (a){case 0xe7:k=12;break;case 0xd7:k=8;break;case 0xb7:k=4;break;case 0x77:k=0;break;default:break;}}}break;}}}}/****************************** ***主函数*************************************/ void main(void){while(1){keyscan(); //调用键盘扫描函数switch(k) //查找按键对应的数码管显示代码{case 0:P0=Dig[0];break;case 1:P0=Dig[1];break;case 2:P0=Dig[2];break;case 3:P0=Dig[3];break;case 4:P0=Dig[4];break;case 5:P0=Dig[5];break;case 6:P0=Dig[6];break;case 7:P0=Dig[7];break;case 8:P0=Dig[8];break;case 9:P0=Dig[9];break;case 10:P0=Dig[10];break;case 11:P0=Dig[11];break;case 12:P0=Dig[12];break;case 13:P0=Dig[13];break;case 14:P0=Dig[14];break;case 15:P0=Dig[15];break;default:break; //退出}}}/**********************************end***************************************/。
51单片机hc595控制一位数码管
/*用hc595控制数码管,显示键盘的值*/#include<reg52.h>#define unchar unsigned char#define unint unsigned intunchar temp,num;sbit scl=P3^6;sbit sda=P3^4;sbit rclk=P3^5; //寄存器时钟unchar code table[]={0x40,0xf9,0x24,0x30,0x99,0x12,0x02,0xf8,0x00,0x10,0xbf,0xb9,0xb6,0}; //数码管编码void delay1()//短延时{;;}void delay(int z) //长延时{int a,b;for(a=0;a<110;a++)for(b=0;b<z;b++);}void init()//初始化{scl=1;sda=1;rclk=0;}void start()//开始条件{scl=1;delay1();sda=1;delay1();sda=0;delay1();}void stop()//停止{scl=1;delay1();sda=0;delay1();sda=1;delay1();}void write(unsigned char temp)//写{int i;start();for(i=0;i<8;i++){scl=0;rclk=0;delay1();sda=(bit)(temp&0x80);delay1();scl=1;delay1();delay1();temp<<=1;} rclk=1;stop();}//键盘扫描unchar scan(){// unchar num,temp;// num=17;P2=0xfd;temp=P2;temp=temp&0xf0;while(temp!=0xf0){P2=0xfd;temp=P2;temp=temp&0xf0;delay(10);while(temp!=0xf0){temp=P2;temp=temp&0xf0;switch(temp){case 0xe0:num=1;break;case 0xd0:num=2;break;case 0xb0:num=3;break;case 0x70:num=4;break;}while(temp!=0xf0){temp=P2;temp=temp&0xf0;}// display(num-1);}}P2=0xfb;temp=P2;temp=temp&0xf0;while(temp!=0xf0){P2=0xfb;temp=P2;temp=temp&0xf0;delay(10);while(temp!=0xf0){temp=P2;switch(temp){case 0xeb:num=5;break;case 0xdb:num=6;break;case 0xbb:num=7;break;case 0x7b:num=8;break;}while(temp!=0xf0){temp=P2;temp=temp&0xf0;}//display(num-1);}}P2=0xf7;temp=P2;temp=temp&0xf0;while(temp!=0xf0){P2=0xf7;temp=P2;temp=temp&0xf0;delay(10);while(temp!=0xf0){temp=P2;switch(temp){case 0xe7:num=9;break;case 0xd7:num=10;break;case 0xb7:num=11;break;case 0x77:num=12;break;}while(temp!=0xf0){temp=P2;temp=temp&0xf0;}// display(num-1);//delay(100);}}return num;}/*void display(unchar num) {P0=table[num-1];delay(10);} */void main()//主函数{init();delay1();while(1)//大循环{write(table[scan()]);}}。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
51单片机控制数码管动态显示程序说明:驱动四位一体数码管动态显示数字,可方便的移植到其它程序中。
例如:1、硬件改为三位一体或二位一体数码管,只需修改Display_Scan()函数COM个数。
2、本例中,采用了共阴数码管,如果用在共阳数码管,只需修改相应段码表。
本程序使用P0口作为段码数据发送端,P2.0-P2.3作为数码管扫描选通,使用P0口时,因单片机内部没有上拉电阻,所以要外接上拉电阻(参考阻值470欧姆).//STC89C52RC//+---------------+//||//||Digital Number//||_______________________ //|||________|//|P0.0--P0.7|===>;| | | | | | | | | | //|(a,b...g,h)|| |--| |--| |--| |--| | 4位共阴数码管//||||__|.|__|.|__|.|__|.|//||-----------------------//||||||//||||||//|P2.7(COM3)|--------+ |||//||||//|P2.6(COM2)|-------------+||//||||//|P2.5(COM1)|------------------+//|||//|P2.4(COM0)|-----------------------+//+---------------+#include//函数声明//=============================================== ========================void DisplayNumber(unsigned int Num);void delayms( int ms);//=============================================== ========================unsigned char code LED_table[]={//使用附带“51单片机工具箱”可以很容易编码0x3f,//"0"0x06,//"1"0x5b,//"2"AAAA0x4f,//"3"FB0x66,//"4"FB0x6d,//"5"GGGG0x7d,//"6"EC0x07,//"7"EC0x7f,//"8" DDDDH0x6f,//"9"0x00,//black0x80//dot};#define black 10 // 空白#define dot11// 小数点unsigned char DisBuff[4];//定义显示缓冲数组unsigned char COM;//定义通信端口//=============================================== ============================sbit COM0=P2^4;sbit COM1=P2^5;//对应口线由硬件确定sbit COM2=P2^6;sbit COM3=P2^7;//=============================================== ============================void Sys_Init(){TMOD=0x01;//定时器/计数器0为定时器方式16位工作模式 TH0=(65536-1000)/256;//初始时间常数TL0=(65536-1000)%6;//1.0msET0=1;//定时器/计数器0中断允许EA=1;//总中断允许TR0=1;//启动定时器/计数器开始工作}void DisplayNumber(unsigned int Num)//显示程序{unsigned char i;EA=0;//禁止总中断for(i=0;i;=0;i--)//循环4次{if (DisBuff[i]==0) DisBuff[i]=black; //消隐无效"0"else break;//例如将 0123 改成 123,仅显示有效数字 }EA=1;//总中断允许}void Display_Scan() interrupt 1// 中断服务程序,数码管选通扫描{TR0=0;TH0=(65536-1000)/256;//高8位和低8位时间常数TL0=(65536-1000)%6;TR0=1;//启动定时器0if(COM>;3) COM=0;COM0=COM1=COM2=COM3=1;//将COM0-COM3置1,全暗switch(COM){case 0:P0=LED_table[DisBuff[0]]; COM0=0; break;//分别选通COM0-COM3低电平有效case 1: P0=LED_table[DisBuff[1]]; COM1=0; break;case 2:P0=LED_table[DisBuff[2]]; COM2=0; break;case 3:P0=LED_table[DisBuff[3]]; COM3=0; break;}// 与decp(0x20)位或,恰好点亮小数点位段COM++;}void delayms(int ms){unsigned int i;for(;ms>;0;ms--)//循环ms次{for(i=0;i<123;i++);// for(i=0;i<123;i++); 每次1ms延迟@ 12.0MHz }// for(i=0;i<113;i++); 每次1ms延迟@11.0592MHz}void main(){unsigned int i;//定义变量Sys_Init();//初始化timer0while(1)//死循环,单片机必须是死循环{DisplayNumber(i);//调用数码管显示函数delayms(200);//调用延时函数,使显示数字保持一段时间i++;//这里演示一个数字累加的程序//也可以直接写一个常数用来显示,看实际效果}//例如DisplayNumber(1234); 编译后将HEX文件}//下载到学板里应该正常显示数字1234。
//另一种段编码方法//=============================================== ============================//宏定义,数码管a-g各段对应的比特,更换硬件只用改动以下8行#definea 0x04 // AAAA #defineb 0x01 // FB#definec 0x10 // FB#defined 0x40 // GGGG #definee 0x80 // EC#definef 0x02 // EC#define g 0x08// DDDDH#defineh 0x20//用宏定义自动生成段码表,很好的写法,值得学习//更换硬件无需重写段码表unsigned char code LED_table[]={a+b+c+d+e+f,//"0"b+c,//"1"a+b+d+e+g,//"2"a+b+c+d+g,//"3"b+c+f+g,//"4"a+c+d+f+g,//"5"a+c+d+e+f+g,//"6" a+b+c,//"7" a+b+c+d+e+f+g,//"8" a+b+c+d+f+g,//"9" b+c+e+f+g,//"H" a+f+e+g,//"C" d+e+f,//"L" g,//"-" 0x00//black};#undef a#undef b#undef c#undef d #undef e #undef f #undef g。