2020年汽车域控制器行业深度分析报告
自动驾驶域控制器

⾃动驾驶域控制器域控制器作为汽车电⼦结构下⼀代的趋势,可以⽤更少的器件完成更多的功能,同时价格更低,在汽车电⼦化特性加强的情况下,也能⽅便管理各个⼦系统,被OEM和Tier1普遍接受。
⽽随着⾃动驾驶的来临,其所涉及的感知、控制、决策系统复杂性更⾼,与车⾝其它系统的信息交互、控制也越来越多,各⽅都希望其能变成⼀个模块化的、可移植性的、便于管理的汽车⼦系统。
此时,专门定位于⾃动驾驶的域控制器系统就应运⽽⽣了。
⾃动驾驶域控制器需要的能⼒⾃动驾驶的域控制器,要具备多传感器融合、定位、路径规划、决策控制、⽆线通讯、⾼速通讯的能⼒。
通常需要外接多个摄像头、毫⽶波雷达、激光雷达,以及IMU等设备,完成的功能包含图像识别、数据处理等。
由于要完成⼤量运算,域控制器⼀般都要匹配⼀个核⼼运算⼒强的处理器,能够提供⾃动驾驶不同级别算⼒的⽀持,业内有NVIDIA、英飞凌、瑞萨、TI、NXP、Mobileye等多个⽅案。
域控制具有实现模块化的优势,将功能划分为单独的域优势众多。
这有助于强调各个⼦系统的功能安全性和⽹络安全需求,简化⾃动化算法的开发和部署,⽅便在各个⼦系统中扩展功能。
因此,在⾃动驾驶背景下,国内外越来越多的Tier1,以及供应商都开始涉⾜这个领域。
麦格纳德国⾸次公布了最新研发的MAX4⾃动驾驶平台。
整个解决⽅案融合了摄像头、⾼清雷达、激光雷达和超声波雷达等在内的传感器系统,以及域控制器处理系统、软件系统。
作为⼀个⾼度集成的⾃动驾驶传感器和计算平台,MAX4具有定制化和⾼扩展性的特点,可实现L4级别的⾃动驾驶,同时适⽤于城市道路和⾼速公路路况。
其中⼀⼤特⾊是搭载MAX4的车辆不需要改变外观,后备箱也不会装有⼀⼤堆的存储和运算硬件,主要原因在于麦格纳采⽤了固态激光雷达,把域控制器也做到了接近实际量产的⼤⼩。
采埃孚(ZF)也展出了搭载多种传感器以及⽀持⼈⼯智能的采埃孚ProAI中央控制器的原型车。
采埃孚ProAI是原型车的中央控制单元,基于这⼀控制单元,采埃孚能利⽤模块化设计开发⾃主驾驶功能。
车身域控制器介绍
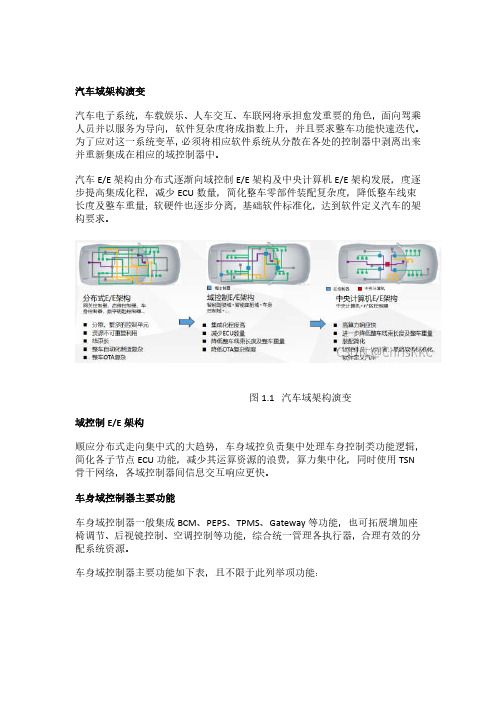
汽车域架构演变汽车电子系统,车载娱乐、人车交互、车联网将承担愈发重要的角色,面向驾乘人员并以服务为导向,软件复杂度将成指数上升,并且要求整车功能快速迭代。
为了应对这一系统变革,必须将相应软件系统从分散在各处的控制器中剥离出来并重新集成在相应的域控制器中。
汽车E/E架构由分布式逐渐向域控制E/E架构及中央计算机E/E架构发展,度逐步提高集成化程,减少ECU数量,简化整车零部件装配复杂度,降低整车线束长度及整车重量;软硬件也逐步分离,基础软件标准化,达到软件定义汽车的架构要求。
图1.1汽车域架构演变域控制E/E架构顺应分布式走向集中式的大趋势,车身域控负责集中处理车身控制类功能逻辑,简化各子节点ECU功能,减少其运算资源的浪费,算力集中化,同时使用TSN 骨干网络,各域控制器间信息交互响应更快。
车身域控制器主要功能车身域控制器一般集成BCM、PEPS、TPMS、Gateway等功能,也可拓展增加座椅调节、后视镜控制、空调控制等功能,综合统一管理各执行器,合理有效的分配系统资源。
车身域控制器主要功能如下表,且不限于此列举项功能:需求资源参考:域控制器方案关键器件:MCU:带以太网的MCU,如SPC58NH系列、S32G系列等都可选CAN:常见TJA1042LIN:TJA1021、NCV7321PHY:RTL900AHSD/LSD:INFINEON系列如BTS5200、ST系列VND7020AJ RELAY:宏发、松下等多通道输入采集:CD1020、CD1030RF接收机:ATA5781、NCK2912LF驱动:ATA5291、NJJ29C0性能指标1.工作电压:9V~16V2.额定电压:12V3.工作温度:-40℃~+85℃4.存储温度:-40℃~+85℃5.休眠电流:≤3mA@12V6.RF接收频率:433.92MHz(可配置)7.RF解调方式:ASK/FSK8.RF接收率(钥匙):100%9.RF接收率(胎压):≥90%10.防护等级:IP5K211.CAN-LIN路由:<2ms12.CAN-CAN直接报文路由:<1ms13.CAN-CAN信号路由:<5ms14.CAN-Ethernet路由:CAN-100BASE T1:<5ms15.Ethernet-Ethernet路由:100BASE T1-100BASE T1:<2ms。
2020年新能源汽车行业特斯拉分析报告
2020年新能源汽车行业特斯拉分析报告2020年9月目录一、特斯拉:新能源汽车绝对龙头 (5)二、电池系统卓越充电桩布局完善 (9)1、电池材料:高能量密度低成本 (10)(1)从18650到21700,特斯拉电池组PACK能量密度一直处于领先优势 (12)(2)电池成本显著低于市场水平,率先达到100美元/kWh关键点 (12)(3)电池衰减少、续航有保证 (13)(4)电池材料技术全球领先,前沿布局实现技术持续迭代 (14)2、BMS(电池管理系统) (14)(1)特斯拉先进的BMS技术,是它卓越电池系统的重要保障 (14)(2)实现对超过7000节电池的有效管理,BMS系统的可靠性和安全性得到充分验证 (15)(3)整车热管理助力,电池温控更加精准、节能 (16)3、充电桩和快充技术解决充电便利性问题 (16)三、智能网联遥遥领先 (19)1、特斯拉汽车的灵魂:全自动驾驶 (19)(1)最被信任能实现自动驾驶的公司 (19)(2)自研芯片,掌握核心竞争力 (20)(3)低成本、低功耗、高算力 (20)(4)FSD系统芯片具有冗余备份,双倍安全 (21)(5)使用现有用户数据训练,数值上远超其他厂商 (22)2、汽车EEA重构OTA带来颠覆性体验 (23)(1)特斯拉是首用OTA的汽车厂商 (23)(2)特斯拉重构汽车EEA(电子架构),域控制器为汽车的OTA提供无限可能 (24)(3)特斯拉域控制器,ECU高度集成,实现软硬件解耦 (24)四、商业模式革新打造汽车产业新生态 (26)1、垂直整合减少中间商赚差价 (26)2、营销模式渠道模式革新 (27)(1)营销模式:少广告、费用低 (27)(2)渠道模式:直营店引流、线上直销 (27)3、软件创收车企盈利新模式 (28)(1)车联网功能 (28)(2)OTA付费升级 (29)(3)全自动驾驶功能(FSD) (29)(4)FSD激活率50% (29)五、相关企业 (32)1、拓普集团 (32)(1)业务涵盖NVH、底盘轻量化、热管理、汽车电子,多轮驱动促进公司持续发展 (32)(2)客户优质,配套特斯拉全球和吉利,随整车厂共同成长 (33)2、三花智控 (33)(1)新能源热管理全球龙头、客户涵盖国内外主流车企 (33)(2)新能源热管理行业好赛道,市场空间广阔 (33)(3)特斯拉热管理核心供应商 (34)(4)斩获恒驰25亿新订单,热管理阀类、泵类产品的独家供应商 (34)3、宁德时代 (34)(1)动力电池龙头企业、具备全球竞争力 (34)(2)积极开拓国外市场、寻求业绩增量 (35)(3)与特斯拉深度合作,巩固领先优势 (35)特斯拉-新能源汽车绝对龙头,科技化变革领军者。
汽车“域”概念之车身域控制器

汽车“域”概念之车身域控制器摘要:根据汽车电子部件功能,通常会将整车分为动力域、底盘域、车身域、自动驾驶域和智能信息域。
本文将为您详细介绍车身域控制器方案,以强大的中心化架构逐步替代传统的分布式架构。
一、汽车域控制器概念域控制器(DCU,Domain Control Unit)的概念最早是由博世、大陆为首的Tier1提出,它的出现是为了解决信息安全和ECU瓶颈的问题。
根据汽车电子部件功能,将整车分为动力域、底盘域、车身域、自动驾驶域和智能信息域,借助CPU强大的算力,将分布式的ECU 统一起来,控制功能迅速、集中。
这样做的好处在于可以大大降低线束成本,节省多个ECU 算力相互冗余造成的资源浪费。
而且,从标准化的角度来说,各个域可以实现标准化的零部件,方便替换、扩展和升级。
图1 汽车电子架构发展趋势二、车身域控制器与BCM对比那么车身域控制器与当前的车身控制模块(BCM,Body Control Unit)区别在哪里?传统的BCM功能主要包括内/外部车灯、雨刮、车窗、车门、电子转向锁等的控制,通过CAN/LIN 与各个小节点进行通讯。
如此多的节点需要控制,会让线束设计变得复杂,成本随之增加,而且软件逻辑控制也十分杂乱。
因此,提出“域”架构设计,相当于对车身节点做了功能和零部件的大集成,在传统的BCM上,集成了空调风门控制、胎压监测、PEPS、网关等功能,使用一颗性能、资源更加强大的MCU就能搞定。
图2 传统BCM三、ZLG车身域控制器方案介绍ZLG在BCM、PEPS、TPMS产品有着丰富的产品开发经验,得益于车身控制方面的积累,我们推出了车身域控制器的方案,帮助客户快速熟悉开发。
详细的车身域控制器框图如下,集成了丰富的CAN/LIN资源,并将高频接收、低频通信功能集成进来。
图3 车身域控制器方案框图1.S32K1xx系列汽车通用MCU●基于ARM Cortex-M4F(14x系列)和ARM Cortex-M0+(11x系列)内核的32位MCU●符合AEC-Q100规范●同系列软硬件兼容,方便资源升级●支持CANFD、CSEc硬件加密,遵循ASIL-B ISO26262功能安全开发●免费提供开发环境S32DS和软件开发包SDK●支持Autosar MCAL图4 S32K系列资源展示2.SPI转4路LIN神器—SJA1124●兼容LIN 2.0, LIN 2.1, LIN 2.2, LIN 2.2A,SAE J2602-1,符合ISO 17987-3:2016,ISO 17987-4:2016 (12 V LIN)●每个LIN通道相互独立使用,1路SPI可扩展多组LIN通道●低功耗模式下供电电流≤15uA图5 SJA1124应用示意图3.CD1030/CD1020特性用于检测33通道(CD1020 22通道)开关状态,通过SPI通讯告诉MCU●开关输入电压范围从-1.0 V to 36 V●12通道可配置输入(切换至BAT或GND)●湿电流可配置(2.0,6.0,8.0,10,12,14,16,or20 mA)●支持过温、过压、欠压、短路保护图6 CD1030应用框图。
2024年车身稳定控制系统(ESC)市场规模分析

2024年车身稳定控制系统(ESC)市场规模分析引言车身稳定控制系统(Electronic Stability Control, ESC)是一种重要的车辆主动安全技术,可以通过感知车辆的运动状态并采取相应的控制策略来提高车辆的稳定性和操控性。
本文将对车身稳定控制系统市场规模进行分析,探索其发展趋势和市场前景。
ESC市场规模分析车身稳定控制系统市场规模的分析主要从市场规模、增长趋势以及影响因素等方面进行。
市场规模根据市场调研数据显示,全球车身稳定控制系统市场规模呈现稳步增长的态势。
在过去几年里,全球车身稳定控制系统市场从X亿美元增长到X亿美元,预计未来几年仍将保持较高的增长速度。
随着汽车工业的快速发展和人们对行车安全的日益重视,车身稳定控制系统在市场上的需求将持续增长。
增长趋势车身稳定控制系统市场的增长受到多方面因素的影响。
首先,政府对交通安全的关注度增加,对车辆主动安全技术的要求也越来越高。
车身稳定控制系统作为一种能够有效提高车辆稳定性和操控性的技术,受到政府监管部门的青睐和支持。
其次,汽车制造商在车身稳定控制系统的研发和应用上投入逐渐增加。
随着技术的不断进步和成本的不断降低,车身稳定控制系统的装配率也在不断提高。
许多汽车品牌已将ESC系统列为标配,这进一步推动了市场的扩大。
此外,用户对行车安全性和驾驶体验的要求不断提高,对车身稳定控制系统的需求也在不断增加。
尤其是在高速公路、山区道路和恶劣天气等条件下,车身稳定控制系统对于减少事故风险和提高操控性发挥着至关重要的作用。
影响因素车身稳定控制系统市场规模受到多种因素的影响。
首先,法规和政策对市场的影响不可忽视。
各国对车身稳定控制系统的安全标准和要求不尽相同,因此法规和政策对市场规模和发展方向有着一定的影响。
其次,技术进步对市场的推动作用显著。
随着传感器、控制算法和执行器等技术的不断创新和发展,车身稳定控制系统的性能得到了显著的提升,同时成本也得到了有效的控制。
中国汽车线束行业现状分析

中国汽车线束行业现状分析内容概况:我国作为全球最大的汽车生产与消费市场,汽车线束销量庞大,已成为全球汽车线束规模增长的主要拉动力。
近几年,我国汽车产销量不断回暖,拉动汽车线束需求持续增加,市场规模不断扩容,2022年我国汽车线束市场规模增长至850.7亿元,增幅超14%。
与传统乘用车相比较,新能源汽车线束价值更高。
低档传统燃油乘用车单车汽车线束价值为2500元左右,中高档传统燃油乘用车单车价值为3500-4500元,而新能源汽车单车汽车线束价值为5000元左右。
新能源汽车渗透率的不断提升,拉动汽车线束量价齐升。
此外汽车智能化发展趋势也将为汽车线束产业发展带来新增量。
在智能化发展趋势下,车辆搭载的电子元器件数量明显增长,作为各个零部件之间电源、信号的传输媒介,线束需求也将相应增加。
随着车辆智能化程度不断提升,对数据传输能力与时效性要求更为严格,催生了大量的高速连接器需求,高速线束需求也将不断提升。
关键词:汽车线束市场规模、汽车线束发展背景、汽车产销量一、汽车线束为汽车的“中枢神经系统”,其性能对汽车的安全性影响较大汽车线束是汽车电路的网络主体,主要用于连接汽车的蓄电池、分电盒、执行器、控制器、传感器等部件,为整车电器电子部件提供电能、信号传输,并为控制回路提供基础连接,使之实现所有的电器功能,汽车线束被成为汽车的“中枢神经系统”。
汽车线束按照电压等级可分为高压线束和低压线束,高压线束电压在300V及以上,主要用于新能源车辆的驱动电力传输;低压线束电压在60V以下,一般车用电压为12V,主要用于整车信号的传递。
按照用途可分为发动机线束、仪表线束、照明线束、空调线束以及辅助电器线束等。
按功能不同分为普通导线、双绞线和屏蔽线等。
汽车线束是由铜材冲制而成的接触件端子(连接器)与电线电缆压接后,塑压绝缘体或外加金属壳体等,以线束捆扎形成连接电路的组件。
汽车线束作为劳动密集型产业,人工成本占总生产成本的12%-17%左右,原材料占比70-80%。
智能驾驶域控制器行业专题报告推荐

智能驾驶域控制器行业专题报告目录1.域控制器是汽车电子电气架构进化的产物 (3)1.1.产生的原因:分布式ECU数量的不断增加 (3)1.2.大众和特斯拉两大技术路线引领行业 (6)1.3.硬件是基础,软件是灵魂 (9)2.渗透率低,持续高景气 (12)2.1.未来几年保持高增长 (12)2.2.竞争格局百花齐放 (14)3.上市公司纷纷发力域控制器 (16)3.1.东软睿驰:发布标准化域控制器产品,核心能力在软件 (16)3.2.德赛西威:已经规划四代域控制器产品 (21)3.3.经纬恒润:ADAS域控制器提供驾驶辅助功能 (23)3.4.均胜电子:提供从LO到L2 ++的全套智能驾驶产品 (24)4.投资建议 (26)5.风险提示 (26)1.域控制器是汽车电子电气架构进化的产物1.1.产生的原因:分布式ECU数量的不断增加智能驾驶行业正在从分布式功能控制器向域控制器,再向中央集中式方向发展。
域控制器的概念是伴随着整车电子电气架构的发展演变而来的。
随着汽车智能化程度不断提升,每辆车上面会有几十个甚至上百个ECU电子控制单元每个都负责单独功能再通过CAN 或者LIN总线连接,导致了车辆成本和技术难度的提升,由此催生了域的概念。
所谓〃域〃就是将汽车电子系统根据功能划分为若干个功能块,每个功能块内部的系统架构由域控制器为主导搭建。
各个域内部的系统互联仍可使用现如今十分常用的CAN通信总线,而不同域之间的通讯,则需要由更高传输性能的以太网作为主干网络承担信息交换任务。
博世将整车电子电气架构的发展分为三层,分别是分布式架构、域集中架构方案和车辆集中架构方案。
目前市面上大多数车型的架构方案都停留在分布式阶段,整个行业处于向域集中架构方案演进的过程中。
图1:博世推出三层电子电气架构从主流的车厂布局来看,多数是按照经典的五域模型去划分。
博世将 整车拆分为车身域、座舱域、底盘域、动力域,以及自动驾驶域五个 大域。
2020汽车电子行业现状及前景趋势
2020年汽车电子行业现状及前景趋势2020年目录1.汽车电子行业现状 (5)1.1汽车电子行业定义及产业链分析 (5)1.2汽车电子市场规模分析 (6)1.3汽车电子行业特点 (7)1.4汽车电子市场运营情况分析 (9)2.汽车电子行业存在的问题 (12)2.1观念问题 (12)2.2标准问题 (12)2.3行业服务无序化 (13)2.4供应链整合度低 (13)2.5基础工作薄弱 (13)2.6产业结构调整进展缓慢 (13)2.7供给不足,产业化程度较低 (14)3.汽车电子行业前景趋势 (15)3.1需求推动增长,汽车电子渗透率持续提升 (15)3.2智能化与电动化共同助力 (15)3.3消费升级叠加网联化深入发展 (15)3.4汽车电子产业政策保驾护航 (16)3.5汽车电子智能化 (16)3.6汽车电子网联化 (17)3.7汽车电子集成化 (18)3.8汽车电子智能化 (18)3.9延伸产业链 (19)3.10呈现集群化分布 (19)3.11需求开拓 (20)4.汽车电子行业政策环境分析 (20)4.1汽车电子行业政策环境分析 (20)4.2汽车电子行业经济环境分析 (21)4.3汽车电子行业社会环境分析 (21)4.4汽车电子行业技术环境分析 (22)5.汽车电子行业竞争分析 (23)5.1汽车电子行业竞争分析 (23)5.1.1对上游议价能力分析 (23)5.1.2对下游议价能力分析 (24)5.1.3潜在进入者分析 (24)5.1.4替代品或替代服务分析 (25)5.2中国汽车电子行业品牌竞争格局分析 (25)5.3中国汽车电子行业竞争强度分析 (25)6.汽车电子产业投资分析 (26)6.1中国汽车电子技术投资趋势分析 (26)6.2中国汽车电子行业投资风险 (27)6.3中国汽车电子行业投资收益 (27)1.汽车电子行业现状1.1汽车电子行业定义及产业链分析汽车电子是车体汽车电子控制装置和车载汽车电子控制装置的总称。
2024年域控制器市场发展现状
2024年域控制器市场发展现状引言域控制器是用作网络管理的一种服务器类设备,它扮演着网络中的主要角色,用于集中管理用户帐户、计算机以及其他网络资源。
随着信息技术的不断发展,域控制器市场也在不断壮大。
本文将探讨域控制器市场的发展现状,包括市场规模、竞争格局和发展趋势。
市场规模近年来,域控制器市场呈现出快速增长的趋势。
随着企业数字化转型的推进,对网络管理的需求不断增加,进一步推动了域控制器市场的发展。
据市场研究机构的数据显示,域控制器市场规模从2016年的XX亿美元增长到2020年的XX亿美元,复合年均增长率达到XX%。
竞争格局目前,域控制器市场竞争激烈,主要厂商包括微软、IBM、思科等。
这些厂商凭借其自身在网络管理领域的技术优势和市场影响力,占据了市场的大部分份额。
其中,微软是最主要的厂商之一,其域控制器产品广泛应用于各个行业和企业规模,占据了市场的领先地位。
此外,近年来还涌现出一些新兴的域控制器厂商,它们凭借技术创新和差异化竞争策略,在市场上获得了一定的份额。
这些新兴厂商通过提供更高效、安全和可靠的域控制器产品,满足了客户对网络管理的不断升级要求。
发展趋势域控制器市场的发展趋势主要有以下几个方面:1.云化趋势:随着云计算技术的飞速发展,越来越多的企业开始将域控制器部署在云端。
云化的域控制器具有易用性、灵活性和可扩展性等优势,成为市场的发展方向。
2.安全性提升:在信息安全威胁日益复杂的背景下,域控制器的安全性成为企业关注的焦点。
未来的域控制器产品将加强安全性能,提供更多的安全功能,以应对不断变化的安全挑战。
3.人工智能应用:人工智能技术的兴起,为域控制器市场带来了新的机遇。
人工智能可以通过分析大量的网络数据,提供智能化的网络管理和安全决策,提高整体的管理效率和安全性。
4.设备智能化:随着物联网技术的普及,越来越多的设备连接到网络上。
域控制器将面临管理的范围和复杂度的增加。
未来的域控制器产品将致力于实现设备智能化,通过自动化管理和智能分析提升管理效率。
汽车座舱域讲解分析

座舱域讲解分析所谓“域”(Domain)即控制汽车的某一大功能模块的电子电气架构的集合,每一个域由一个域控制器进行统一的控制,最典型的划分方式是把全车的电子电气架构分为五个域:动力域、底盘域、车身域、座舱域和自动驾驶域座舱域详细讲解:(1)车载显示系统:车载显示系统硬件层面种类拓展,软件层面人机交互技术升级,功能多元化。
在硬件层面,车载显示产业链的上游包括玻璃基板、偏光片等显示组件厂商,中游为显示模组及触控模组供应商,下游以一级供应商和整车厂为主。
在软件层面,智能座舱一级供应商通常具备较强的系统软件开发能力,例如德赛西威基于高通第4代骁龙数字座舱芯片打造德赛第4代智能座舱系统。
车载显示屏:车载显示屏作为人机交互的主要界面是智能化创新关键点,逐渐成为汽车的标配。
中控屏幕大屏、多屏趋势显著,10英寸以上中控屏成为主流。
一芯多屏技术突破,显示屏联屏化、多形态化。
OLED、Mini LED升级可期。
抬头显示(HUD):汽车智能时代HUD重要性凸显,AR-HUD成为未来的主流发展方向。
2021年新车型HUD的搭载率为7.11%。
与W-HUD相比,AR-HUD显示信息更丰富,安全性更高,此外AR-HUD可以结合自动驾驶ADAS,直观地呈现车距预警、车道偏离预警等信息。
目前AR-HUD的搭载率较低,市场主流是W-HUD,随着自动驾驶技术的发展,AR-HUD 是未来发展的主流。
预测未来5年内W-HUD仍为市场主流,AR-HUD逐渐兴起。
(2)座舱安全系统:智能驾驶技术催生DMS/EDR发展,政策助力安全检测系统落地政策促进DMS等安全驾驶辅助系统持续发展。
汽车智能时代,DMS系统搭载率持续提升,为智能驾驶保驾护航。
2021年新车型DMS搭载率为20.5%,相比2020年增长6.6pct。
DMS 解决方案也在快速与舱内其他功能进行融合或硬件集成,主机厂细化并扩展了DMS功能。
政策推动EDR落地,车载安全硬件放量。
智能座舱域控制器设计与展望

智能座舱域控制器设计与展望作者:徐磊来源:《时代汽车》2024年第09期摘要:随着自动驾驶技术的飞速发展,相关领域的研究与应用已取得了突破性进展,目前驾驶等级已由低级别的人类驾驶进入到高阶辅助驾驶,对各种软硬件的要求更高。
传统的座舱只针对驾驶员而言,而无人驾驶系统的智能座舱面向所有车内人员,并集成了丰富的生态体验。
国内智能座舱的技术研究,整体领先于国外发达国家,但在自主核心技术方面还存在一定差距。
本文根据相关项目研发,首先提出一种基于高通SA8295的智能座舱域控制器系统的设计方法,在简要论述问题背景及行业特点的基础上,对该域控制器进行了系统设计和试验研究,最后对该行业未来发展前景进行了展望。
关键词:智能座舱域高通SA8295 域控制器无人驾驶本文根据理论结合实际的思维,设计实现了一种基于高通SA8295的智能座舱域控制器系统。
在简要提出问题背景和智能座舱域控制器行业现状进行分析的基础上,对SA8295的智能座舱域控制器系统进行了具体设计,并进行了相关试验研究,最后对相关领域发展前景进行了展望。
1 问题背景随着自动驾驶技术的不断发展,座舱的应用场景不断拓展,除了用于导航、安全预警等传统驾驶以及交通安全相关的需求外,各种各样的人机交互及娱乐体验变得越来越突出,座舱的应用场景开始逐渐延伸到办公、生活、娱乐等场合中。
应用场景不断地拓展,新的功能需求不断在衍生,从而对座舱算力提出增长需求。
在当前广泛应用的无人驾驶领域中,智能座舱域控制器相当于整个系统的大脑,新技术如CPU、GPU、NPU、DSP、ASIC等模块的高度集成,加速了座舱智能化行业的生态应用和产品的快速迭代。
纵观国内外相关技术特点,智能座舱域控制器的研究多数集中在Soc芯片[1]从提升图像视频显示质量的角度,对于全面提升算力、智能化信息化水平的研究较少。
因此迫切需要借鉴世界知名OEM、Tier1和科研院所的最新研究成果,将高科技元素更多地融入到智能座舱域的设计研究中去。
2024年车身控制器市场分析报告
2024年车身控制器市场分析报告概述车身控制器是现代汽车中的关键部件,负责控制和管理车辆的各种功能和系统。
随着汽车电子技术的不断发展和进步,车身控制器市场也在快速增长,本报告将对车身控制器市场进行全面分析。
市场规模根据市场研究数据,预计车身控制器市场在未来几年将保持较高的增长率。
截至2020年,全球车身控制器市场规模达到XX亿美元,预计到2025年将增长至XX亿美元。
这种增长主要是由于不断增长的汽车销量、严格的安全要求以及快速发展的汽车电子技术所推动。
市场驱动因素1.科技进步:随着科技的不断进步,车身控制器的功能不断增强,包括智能驾驶、自动泊车、碰撞预警等诸多功能。
这些新的科技创新促使了消费者对汽车控制技术的需求增加。
2.安全需求:随着道路交通事故数量的增加,对于车辆安全性的要求也越来越高。
车身控制器可以通过控制和管理车辆的各种系统来提高车辆的安全性能,从而满足消费者对安全性的需求。
3.环保法规:全球各地对车辆尾气排放和燃料经济性的要求越来越严格,这促使汽车制造商采用更加智能的车身控制器来优化车辆的燃油消耗和减少尾气排放。
市场分类根据功能和类型的不同,车身控制器市场可分为多个子市场,主要包括以下几个方面:1. 驾驶辅助系统:包括自动驾驶、泊车辅助、盲点检测等。
2. 安全控制系统:包括碰撞预警、自动刹车、稳定控制等。
3. 灯光控制系统:包括前大灯、雾灯、灯光亮度控制等。
4. 舒适性控制系统:包括空调控制、窗户控制、座椅控制等。
市场地域分析根据地域的不同,车身控制器市场可以进一步分为北美、欧洲、亚太和其他地区。
目前,北美地区是车身控制器市场的主要消费地区,占据全球市场份额的XX%。
欧洲地区紧随其后,占据XX%的市场份额。
亚太地区是增长最快的市场之一,预计在未来几年将保持较高的增长率。
竞争态势车身控制器市场存在激烈的竞争,主要厂商包括XX、XX、XX等。
这些厂商通过不断的研发和技术创新,推出更加智能和先进的车身控制器产品,以满足消费者的需求。
汽车EE架构分析报告
汽车EE架构分析报告2020年6月内容目录1. 汽车E/E 架构是软件定义汽车的关键 (4)1.1. 硬件架构升级:分布式向域控制/中央集中式发展 (4)1.1.1. 硬件架构如何升级? (4)1.1.2. 硬件架构升级有何好处? (6)1.2. 软件架构升级:软硬件由高度耦合向分层解耦发展 (7)1.2.1. 软件架构如何升级? (7)1.2.2. 软件架构升级有何好处? (9)1.3. 通信架构升级:LIN/CAN 向以太网发展 (9)1.3.1. 通信架构如何升级? (9)1.3.2. 通信架构升级有何好处? (11)2. 谁是E/E 架构升级中的优等生? (12)2.1. 特斯拉 E/E 架构升级情况如何? (12)2.2. 其他玩家 E/E 架构升级如何? (14)3. 谁能在此次变革中把握先机? (16)3.1. 德赛西威 (16)3.2. 中科创达 (17)3.3. 四维图新 (17)3.4. 伯特利 (18)3.5. 星宇股份 (18)3.6. 科博达 (19)3.7. 均胜电子 (19)3.8. 中国汽研 (19)4. 分析提示 (20)图表目录图 1:由控制指令运算为主的分布式 ECU 向 AI 运算的中央计算平台发展 (4)图 2:博世 E/E 架构升级进程 (5)图 3:同等功能应用条件下域控制算力设计需求更少 (6)图 4:AutoSAR 核心合作伙伴 (8)图 5:Classic AutoSAR 体系架构 (8)图 6:Classic AutoSAR 架构框图 (8)图 7:Adaptive AutoSAR 较 Classic AutoSAR 优势明显 (9)图 8:各域之间通过网关完成数据交换 (10)图 9:未来车载以太网应用渗透率持续增加 (11)图 10:车载以太网的发展过程 (11)图 11:Model 3 网络拓扑图(2020 年 2 月) (12)图 12:Model 3 控制器主要负责单元 (13)图 13:特斯拉 E/E 架构技术领先 (14)图 14:宝马下一代 E/E 架构 (15)图 15:丰田采用 Central & Zone 的 E/E 架构 (15)图 16:安波福 SVA 架构 (15)图 17:华为基于计算和通信的 CC 架构 (15)表 1:传统汽车总线 (10)表 2:主要企业 E/E 架构方案对比 (15)1. 汽车E/E 架构是软件定义汽车的关键汽车电子电气架构(又称 E/E 架构)是指整车电子电气系统的总布置方案,即将汽车里的各类传感器、处理器、线束连接、电子电气分配系统和软硬件整合在一起,以实现整车的功能、运算、动力及能量的分配。
2024年车身稳定控制系统(ESC)市场分析报告

2024年车身稳定控制系统(ESC)市场分析报告摘要本报告对车身稳定控制系统(ESC)市场进行了全面分析。
首先介绍了ESC系统的工作原理和主要功能,然后对全球ESC市场的规模、增长趋势以及竞争格局进行了深入研究。
接着对ESC市场的地域分布和主要应用领域进行了详细分析。
最后,我们对ESC市场未来的发展趋势进行了展望。
1. 引言车身稳定控制系统(ESC)是一种先进的汽车安全技术,它通过车辆动态参数的监控和控制,能够在遭遇潜在危险时保持车辆稳定。
ESC系统能够监测车辆的横向加速度、转向角度、车速等参数,并根据这些参数对车辆的制动系统和动力系统进行控制,从而实现避免和纠正车辆失控的功能。
目前,ESC系统已成为许多汽车制造商的标配,并且在全球范围内得到了广泛应用。
2. ESC市场规模和增长趋势根据市场研究公司的数据分析,全球ESC市场目前正呈现出强劲的增长态势。
2019年,全球ESC市场规模达到了100亿美元,预计到2025年将达到250亿美元,年复合增长率超过10%。
主要推动ESC市场增长的因素包括汽车安全标准的提升、消费者对安全性能的关注以及新兴市场的快速发展等。
3. ESC市场竞争格局在全球ESC市场上,主要的竞争者包括博世、德尔福、Aisin Seiki等知名汽车零部件制造商。
这些公司在技术研发、产品创新和市场推广方面都具有较强的竞争力。
此外,一些新兴的汽车科技公司和电子公司也开始进入ESC市场,并在某些领域展现出强大的竞争实力。
4. ESC市场地域分布目前,欧洲地区是全球ESC市场的主要消费地区,占据了市场份额的40%以上。
欧洲汽车制造商在车辆安全性能方面的要求较高,并且多数汽车制造商都将ESC系统作为标配装备。
北美地区和亚太地区也是重要的ESC市场,这些地区的汽车消费水平较高,并且持续增长。
5. ESC市场应用领域ESC系统主要应用于乘用车和商用车领域。
在乘用车领域,中高端汽车更容易配备ESC系统,而在商用车领域,随着相关政策的推动以及运输安全的要求,越来越多的商用车开始配备ESC系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2020年汽车域控制器行业深度分析报告内容目录域控制器的背景 (6)无人驾驶是大势所趋 (6)无人驾驶催生产业链新机遇 (8)无人驾驶进程中车辆电子电气架构从分布到集中 (9)域控制器的前世今生 (12)前世:汽车ECU的出现及瓶颈 (12)今生:DCU(域控制器)走上舞台 (15)域控制器的分类——经典的五域划分 (16)1.动力域(安全) (16)2.底盘域(车辆运动) (18)3.座舱域/智能信息域(娱乐信息) (21)4.自动驾驶域(辅助驾驶) (22)5.车身域(车身电子) (23)域控制器产业链机遇 (23)域控制器硬件拆解 (24)域控制器产业链梳理 (26)域控制器带来的硬件升级和附加软件机遇 (33)域控制器的未来 (38)域控制器是车辆OTA升级的基石 (38)域控制器未来走向中央控制器时代 (40)投资建议和推荐标的 (42)德赛西威:智能座舱龙头企业,智能驾驶推进有序 (43)科博达:一体两翼,汽车电子核心标的 (43)星宇股份:好行业+好公司+好格局,具备全球车灯龙头潜质 (44)伯特利:线控制动产品切入ADAS执行层,客户高端化升级 (44)图表目录图1:出行供需公式 (7)图2:从云-管-端三大维度拆解智能驾驶产业链 (8)图3:无人驾驶实现路径 (8)图4:华为智能汽车整体目标 (9)图5:博世划分的电子电气架构演进 (10)图6:智能汽车渐进式发展 (10)图7:博世16bit发动机控制器(机械节气门) (13)图8:博世16bit发动机控制器(机械节气门) (13)图9:所有级别汽车中ECU增加的数量 (14)图10:分布式电子电气架构 (14)图11:根据应用域划分的车载网络 (15)图12:博世DCU电子架构 (16)图13:合众汽车动力域控制 (18)图14:EHB系统示意图 (19)图15:EMB系统示意图 (19)图16:第二代iBooster实物图 (19)图17:博世的最新产品IPB图 (19)图18:电助动力系统(EPS)示意图 (20)图19:线控转向系统(SBW)示意图 (20)图20:博世发动机ECU外观 (24)图21:德赛西威自动驾驶DCU外观 (24)图22:博世ECU拆解 (24)图23:特斯拉AP2.5自动驾驶DCU拆解 (24)图24:2017年中国汽车电子市场MCU竞争格局 (29)图25:中国PCB市场下游应用分布 (30)图26:国内主要PCB厂商汽车业务营收 (30)图27:国内主要PCB厂商汽车业务营收占比 (30)图28:国内主要汽车PCB厂商整体毛利率对比 (31)图29:国内主要汽车PCB厂商整体净利率对比 (31)图30:无源器件分类 (31)图31:无源器件细分品类占比 (31)图32:2017年全球MLCC品牌竞争格局 (32)图33:自动驾驶L1-L5需要的算力 (34)图34:FPGA和ASIC对比 (36)图35:车载通信网络升级趋势 (37)图36:车辆电子电气架构向集中计算平台升级 (40)图37:特斯拉Model 3网络拓扑图 (41)图38:宝马规划中央计算平台的电子电气架构 (42)图39:可以在ECU或云端执行的功能的总体系统结构和软件设计 (42)表1:SAE无人驾驶自动化程度划分 (11)表2:中国驾驶自动化等级与划分要素的关系 (11)表3:2020年是L3级别车型量产年 (11)表4:主要L3级别车型配置参数比较 (12)表5:汽车L1-L5升级过程中控制器逐渐集成化 (12)表6:汽车的常见ECU应用及功能 (13)表7:EHB系统与EMB系统比较 (19)表8:线控制动系统主要供应商、产品与客户情况 (20)表9:EPS与SBW介绍 (20)表10:电助动力系统(EPS)主要供应商及客户 (21)表11:线控转向系统(SBW)主要供应商及产品现状 (21)表12:典型座舱域控制器厂商及其方案和客户 (22)表13:典型自动驾驶域控制器厂商及相应域控制器性能介绍 (23)表14:域控制器产业链一览 (27)表15:芯片产业链及主要厂商梳理 (28)表16:2019年全球前十大IC设计公司(单位:百万美元) (28)表17:2018年国内前10大IC设计厂商(单位:亿元人民币) (28)表18:全球/国内排名前20的PCB厂商 (29)表19:国内主要PCB厂商汽车业务梳理 (30)表20:典型座舱域控制器厂商及其方案和客户 (32)表21:典型自动驾驶域控制器厂商及其客户和伙伴 (33)表22:动力域、底盘域厂商及其方案和客户 (33)表23:单核和多核处理器对比 (34)表24:CPU VS GPU (35)表25:FPGA和ASIC成本和开发周期对比 (36)表26:域控制器典型的系统技术规格 (36)表27:自动驾驶域控制器典型的传感器通道 (37)表28:常见的车载通信网络优劣势对比 (37)表29:特斯拉历史上几次较有影响力的OTA升级 (39)表30:传统车企和造车新势力开始发力布局OTA技术 (40)表31:基于域和基于Central&Zone架构的对比 (41)域控制器的背景无人驾驶是大势所趋要理解目前的无人驾驶(智能汽车),离不开以下一个公式:出行需求=总量*里程左边,出行需求=人数*人均出行里程。
右边第一项,总量=公共交通工具+私人交通工具。
右边第二项,里程=时间*速度。
图1:出行供需公式资料来源: 国信证券经济研究所整理需求方面,随着国内城市化和现代商业化的发展,一方面提高了城市人口,一方面城市半径不断提升(主要城市半径>25km),居民的生活工作出行距离增加,等式左边的出行需求是快速增加的。
出行需求的增加必将要求总量和使用效率的提升。
公共交通工具方面,公交和地铁等领域存在短板,2017年中国地铁运行线路总长度为3881.77公里,与美国仍有较大差距(重铁+轻铁,5799公里)。
同时主要城市每万人拥有的公共出租汽车数量呈下降趋势。
私人交通工具方面,截至2019年底,全国机动车保有量达3.48亿辆,其中汽车保有量达2.6亿辆,千人保有量达170辆,受限于道路和停车场等土地要素的短缺,城市保有量增长存在瓶颈。
国内居民的出行需求和供给方存在着缺口,这种缺口部分程度削弱了居民的出行品质,造成拥堵的路上交通和地铁。
如何提高现有资源的使用效率是解决出行矛盾的关键。
智能驾驶和共享出行就是谋求提升资源使用率的供给端革命(我们在18年12月发布了共享出行行业专题-《共享汽车,非成熟条件下的模式探讨》),19年7月发布了智能驾驶行业专题-《ADAS+车联网,无人驾驶之路》)。
20年3月发布了华为汽车行业专题-《华为汽车业务现状、竞争格局和产业链机遇》。
根据华为智能汽车解决方案的拆解,未来的智能驾驶产业链将从云-管-端三大层面带来全产业链机遇。
本篇域控制器深度报告就是从“端”的层面对其细分核心决策部件进行分析。
图2:从云-管-端三大维度拆解智能驾驶产业链资料来源: 国信证券研究所整理无人驾驶催生产业链新机遇无人驾驶实现需要四步走。
我们认为无人驾驶从应用层面可以分为四个阶段,阶段1是资讯被动侦测期,该阶段主要应用于车载资讯服务;阶段2是资讯互动交换期,也就是当前所处阶段,该阶段主要应用于ADAS等;阶段3是资讯主动传达期,该阶段主要应用为V2V和V2I,融合传感器技术实现车路协同;阶段4就是终极无人驾驶期,无人驾驶背景下车辆运营效率有望大幅提升,该阶段的典型应用就是共享汽车。
图3:无人驾驶实现路径资料来源: MIC,国信证券研究所整理无人驾驶进程中的车辆架构发生较大改变——从EE(电子电气)到“计算+通信”。
实现汽车软件定义、持续创造价值。
传统电子电气架构中,车辆主要由硬件定义,采用分布式的控制单元,专用传感器、专用ECU及算法,资源协同性不高,有一定程度的浪费;计算+通信架构中,旨在实现软件定义车,域控制器在这里发挥重要作用,通过域控制器的整合,分散的车辆硬件之间可以实现信息互联互通和资源共享,软件可升级,硬件和传感器可以更换和进行功能扩展。
图4:华为智能汽车整体目标资料来源: 世界智能网联汽车大会-华为《聚焦ICT技术,使能车企造好-车,造-好车》,国信证券经济研究所整理无人驾驶进程中车辆电子电气架构从分布到集中汽车电子电气架构奠定车辆底层框架。
汽车电子电气架构(Electronic and Electrical Architecture,文中简称EEA)是由车企所定义的一套整合方式,是一个偏宏观的概念,类似于人体结构和建筑工程图纸,也就是搭了一副骨架,需要各种“器官”、“血液”和“神经”来填充,使其具有生命力。
具体到汽车上来说,EEA把汽车中的各类传感器、ECU(电子控制单元)、线束拓扑和电子电气分配系统完美地整合在一起,完成运算、动力和能量的分配,实现整车的各项智能化功能。
无人驾驶进程中的车辆架构从分布向集中发展。
全球零部件龙头企业博世曾经将汽车电子电气架构划分为三个大阶段:分布式电子电气架构-【跨】域集中电子电气架构-车辆集中电子电气架构,三个大阶段之中又分别包含两大发展节点,一共六个发展节点,细化了电子电气架构将从分布式向车辆集中式演变的过程。
伴随汽车自动化程度从L0-L5逐级提升,目前大部分的传统车企电子电气架构处在从分布式向【跨】域集中过渡的阶段。
分布式的电子电气架构主要用在L0-L2级别车型,此时车辆主要由硬件定义,采用分布式的控制单元,专用传感器、专用ECU及算法,资源协同性不高,有一定程度的浪费;从L3级别开始,【跨】域集中电子电气架构走向舞台,域控制器在这里发挥重要作用,通过域控制器的整合,分散的车辆硬件之间可以实现信息互联互通和资源共享,软件可升级,硬件和传感器可以更换和进行功能扩展;再往后发展,以特斯拉Model 3领衔开发的集中式电子电气架构基本达到了车辆终极理想——也就是车载电脑级别的中央控制架构。
图5:博世划分的电子电气架构演进资料来源: 博世,国信证券经济研究所整理车辆自动驾驶级别主要参照0-5级分类。
目前全球公认的汽车自动驾驶技术分级标准主要有两个,分别是由美国高速公路安全管理局(NHTSA)和国际自动机工程师学会(SAE)提出。
中国于2020年参考SAE的0-5 级的分级框架发布了中国版《汽车驾驶自动化分级》,并结合中国当前实际情况进行了部分调整,大体上也将自动驾驶分为0-5级。
图6:智能汽车渐进式发展资料来源:各政府官网,国信证券经济研究所整理L3级别是汽车自动化道路的一次跃升。
从法规和技术两个维度来看,L3级别自动驾驶都是汽车自动化道路上的一大跃升。
从法规来看,SAE和中国《汽车自动化分级》规定L0-L2级别均是人类主导驾驶,车辆只做辅助,L0、L1和L2之间的差异主要在于搭载的ADAS功能的多少,而L3开始,人类在驾驶操作中的作用快速下降,车辆自动驾驶系统在条件许可下可以完成所有驾驶操作(作用不亚于驾驶员),驾驶员在系统失效或者超过设计运行条件时对故障汽车进行接管;从技术来看,L0-L2主要运用的传感器有摄像头、超声波雷达和毫米波雷达,L3及之后原有传感器配套数量上升,同时高成本的激光雷达方案难以避开,传感器之间的协同要求提升,多传感器融合算法愈发复杂,所需控制器芯片算力大幅提升。