ARM与FPGA通信
《ARM和FPGA协同实现高速Hadamard单像素相机的研究》范文

《ARM和FPGA协同实现高速Hadamard单像素相机的研究》篇一ARM与FPGA协同实现高速Hadamard单像素相机的研究一、引言随着科技的进步和数字成像技术的发展,单像素相机以其独特的技术优势,如高空间分辨率、高信噪比和低功耗等特性,在科研和工业应用中得到了广泛的关注。
其中,Hadamard单像素相机以其快速成像和良好的图像质量,成为了当前研究的热点。
本文将探讨如何利用ARM和FPGA的协同作用,实现高速Hadamard单像素相机的设计与应用。
二、Hadamard单像素相机技术概述Hadamard单像素相机是一种基于Hadamard变换的编码型相机。
通过与特殊的Hadamard编码/解码矩阵结合,它可以提高单像素成像的精度和速度。
由于其对光的快速处理和可编码的特点,它已广泛应用于多模式光测量系统。
三、ARM与FPGA协同设计的必要性ARM是一种广泛使用的微处理器架构,具有强大的控制能力和灵活的扩展性。
而FPGA(现场可编程门阵列)则具有强大的并行处理能力和可定制性。
将ARM和FPGA结合起来,可以充分利用两者的优势,实现对数据的快速处理和精准控制。
对于高速Hadamard单像素相机而言,需要强大的数据传输能力和高速的处理能力,而ARM与FPGA的协同设计正是满足这一需求的最佳选择。
四、ARM与FPGA协同实现高速Hadamard单像素相机的设计1. 硬件设计:设计一个以ARM为核心的控制系统,负责整个相机的控制和数据处理。
同时,使用FPGA作为数据处理单元,实现对数据的快速处理。
通过ARM与FPGA的高速通信接口,实现数据的快速传输。
2. 软件设计:在ARM端设计一个主控制器程序,实现对整个系统的控制和监控。
在FPGA端设计一个数据处理解码器程序,利用Hadamard变换对接收到的数据进行处理和解码。
通过主控制器与数据处理解码器的协同工作,实现对数据的快速处理和高质量成像。
五、实验结果与分析通过实验验证了ARM与FPGA协同实现高速Hadamard单像素相机的可行性和有效性。
fpga与arm之间的大量数据传输

fpga与arm之间的大量数据传输FPGA与ARM之间的大量数据传输近年来,FPGA(现场可编程门阵列)和ARM(高级RISC机器)已成为嵌入式系统设计中的两个重要组成部分。
FPGA作为一种可编程硬件设备,具有高度的灵活性和可重构性,能够实现各种复杂的功能。
而ARM作为一种低功耗、高性能的处理器架构,广泛应用于各种移动设备和嵌入式系统中。
在许多应用中,FPGA和ARM需要进行大量的数据传输,以实现高效的数据处理和通信。
在FPGA和ARM之间进行大量数据传输时,有几种常用的方法。
一种是通过共享内存进行数据交换。
FPGA和ARM可以共享同一片物理内存空间,通过读写内存的方式来传输数据。
这种方法简单直接,但需要保证数据的一致性和同步性,以避免数据冲突和错误。
另一种常见的数据传输方法是使用DMA(直接内存访问)控制器。
DMA控制器可以直接在FPGA和ARM之间进行数据传输,减少了处理器的负载,提高了数据传输的效率。
通过配置DMA控制器的寄存器和缓冲区,可以实现高速的数据传输和流水线操作。
这种方法尤其适用于大规模数据的传输,如视频流、音频流等。
还可以使用专门的接口协议来实现FPGA和ARM之间的数据传输。
常见的接口协议有AXI(高级可扩展接口)、AHB(高级高性能总线)等。
这些接口协议定义了数据的传输格式、时序和控制信号,使得FPGA和ARM之间的数据传输更加方便和可靠。
通过使用这些接口协议,可以实现高速的数据传输和复杂的数据交互。
在进行大量数据传输时,需要考虑数据的传输速度和带宽。
FPGA和ARM的数据传输速度受到多个因素的影响,包括硬件设计、时钟频率、数据宽度等。
为了提高数据传输的速度,可以采用并行传输和流水线操作等技术。
例如,可以将数据分为多个片段,同时传输多个片段,以提高传输的效率。
同时,还可以使用高速的通信接口和协议,如PCIe(外部组件互连快速总线)、Ethernet(以太网)等,来实现高速的数据传输。
fpga arm联合原理

fpga arm联合原理FPGA(Field-Programmable Gate Array)是一种可编程逻辑器件,而ARM(Advanced RISC Machines)则是一种基于精简指令集(RISC)的处理器架构。
本文将探讨FPGA和ARM的联合原理,即在FPGA中实现ARM处理器的设计和应用。
我们来了解一下FPGA。
FPGA是一种可编程逻辑器件,可以通过编程来实现不同的数字电路功能。
与传统的固定功能集成电路(ASIC)相比,FPGA具有灵活性和可重构性,能够根据需要进行重新编程,使其适用于多种应用场景。
FPGA的核心是由大量的可编程逻辑单元(CLB)和可编程互连资源(IOB)组成的,可以通过内部连接和外部引脚与其他电路元件进行通信。
而ARM是一种处理器架构,被广泛应用于各种嵌入式系统和移动设备中。
ARM处理器以其低功耗、高性能和高度灵活的特性而闻名。
ARM处理器采用了精简指令集(RISC)的设计理念,使其指令集简洁而高效,能够在有限的资源下提供强大的计算能力。
将FPGA和ARM结合起来,可以充分发挥两者的优势,实现更灵活、高性能的系统设计。
在FPGA中实现ARM处理器的设计主要通过将ARM的RTL(Register-Transfer Level)描述转化为FPGA可编程逻辑的实现方式。
具体而言,可以使用硬件描述语言(HDL)如VHDL 或Verilog来编写ARM处理器的RTL描述,然后使用FPGA开发工具将其综合为FPGA的配置文件。
在配置文件中,ARM处理器被映射到FPGA的CLB和IOB资源中,以实现ARM指令的执行和数据处理。
通过FPGA实现ARM处理器的设计具有多个优势。
首先,FPGA可以提供更大的逻辑资源和存储容量,可以容纳更复杂的ARM处理器设计和更丰富的外设接口。
其次,FPGA的可编程性使得ARM处理器可以根据需要进行灵活的配置和优化,以满足不同应用场景的需求。
此外,FPGA具有较低的功耗和较高的计算性能,可以为ARM处理器提供更好的运行环境。
详解ARM处理器和FPGA之间的通信技术

详解ARM处理器和FPGA之间的通信技术详解ARM处理器和FPGA之间的通信技术1前言在ARM+FPGA系统结构中,实现基于ARM的嵌入式处理器和FPGA之间通信最简单的方法就是通过异步串行接口EIARS232C。
考虑选用集成有UART(Universal Asynchronous Receiver / TraNSmitter )控制器的嵌入式处理器(例如,EP7312),那么嵌入式处理器一侧就具有了利用异步串行接口收、发通信的能力。
然而,FPGA内部并不拥有CPU控制单元,无法处理由UART控制器产生的中断,所以FPGA 一侧不能利用现成的UART控制器构成异步串行接口,必须将UART控制器的功能集成到FPGA内部。
同一个系统中的ARM与FPGA之间属于短距离通信连接,他们之间的异步串行通信并不需要完整的UART功能,那些RS232标准中的联络控制信号线可以省略,仅仅保留收、发数据线和地线,这样给UART功能的FPGA编程实现带来了极大的省略。
嵌入式处理器EP7312带有2个支持异步串行通信RS232的16550类型的UART,UART1不仅有TX,RX,而且支持Modem控制信号,UART2只有标准的TX,RX以及地信号,刚好能够利用UART2与FPGA实现通信。
2简化UART功能的FPGA实现本文将详细地讨论简化UART功能在FPGA中的实现方法。
简单回顾一下异步串行通信的数据格式。
图2表明在异步传送中串行发送一个数据字节的位定时关系(图中没有包括奇偶校验位)。
发送一个完整的字节信息,首先是一个作为起始位的逻辑0位,接着是8个数据位,然后是1个、1+1/2个或2个停止位逻辑1位,数据线空闲时呈现为高或1状态。
在字符的8位数据部分,先发送数据的最低位,最后发送最高位。
每位持续的时间是固定的,由发送器本地时钟控制,每秒发送的数据位个数,即为波特率。
起始位和停止位起着很重要的作用。
显然,他们标志每个字符的开始和结束,但更重要的是他们使接收器能把他的局部时钟与每个新开始接收的字符再同步。
FPGA与ARM的GPMC总线通信接口设计
敬请登录网 站在线投稿
2 0 1 7 # - g 3 期
《 平 机 1 菡 } 入式豪 碗启I j 9 》
4 7
l l
|
l 。
成信 号 的 计算 , 最 重 要的 是 它本 身 灵 活 的 编程 方 式 能 很 好 地模 拟 GP MC总 线 接 口 的读 写 时 序 , 从而 实现 F P GA 和 ARM 之 间数 据 的稳 定 传 输 。
定 的顺 序 将 数 据 存 储 到 F P GA 内 部 寄 存 器 中 , 当 数 据
存储 完 成 , 此时 F P GA 会 给 AR M 发 出 中断 响应 命 令 ,
AR M将F P G A 内部 寄 存 器 的 数 据 进 行 读 取 。AR M 采 用
TI 公司的 C o r t e x - A8芯 片作 为 主 处 理 器 , C o r t e x - A8芯 片 作 为 系 统 的核 心 , 实 现对 F P GA 数 据 的 读 写 以 及 对 整 个 系 统 的 控 制 。F P GA 采 用 Xi l i n x公 司 的 Vi r t e x - 6器 件 来 完成对高速信号的采集 , 以及 利 用 它 的快 速 计 算 能 力 来 完
fpga arm联合原理

fpga arm联合原理FPGA(现场可编程门阵列)和ARM(高级微处理器)是两种常见的硬件技术,在计算机领域发挥着重要作用。
本文将探讨FPGA和ARM 的联合原理,介绍它们的基本概念、特点以及相互结合的优势。
一、FPGA的基本概念与特点FPGA是一种可编程逻辑器件,由大量的可编程逻辑单元和可编程互连资源组成。
它的主要特点是灵活性和可重构性。
与传统固定功能集成电路相比,FPGA可以根据用户的需求进行灵活的编程和配置,实现各种不同的功能。
这使得FPGA在许多领域中具有广泛的应用,如数字信号处理、通信、嵌入式系统等。
二、ARM的基本概念与特点ARM是一种基于RISC(精简指令集计算机)架构的微处理器。
它具有高性能、低功耗、可扩展性和易于设计的特点。
ARM处理器广泛应用于移动设备、嵌入式系统和智能家居等领域。
ARM架构提供了丰富的指令集和强大的软件生态系统,使得开发者可以方便地进行软件开发和调试。
三、FPGA与ARM的联合原理FPGA和ARM可以通过将ARM处理器与FPGA芯片相结合,实现更高性能和更灵活的系统设计。
具体来说,ARM处理器可以作为FPGA系统的主控制器,负责处理复杂的软件算法和任务调度。
而FPGA则可以作为ARM处理器的协处理器,负责高速的数据处理和硬件加速。
FPGA与ARM的结合可以发挥各自的优势。
ARM处理器具有强大的运算和控制能力,适合处理复杂的软件算法和任务调度。
而FPGA具有并行处理和定制化硬件加速的能力,可以实现高速的数据处理和特定功能的硬件加速。
通过将二者结合起来,可以充分发挥硬件和软件的优势,提高系统的性能和灵活性。
具体来说,FPGA和ARM可以通过总线接口进行通信。
ARM处理器可以通过总线接口向FPGA发送控制指令和数据,FPGA则可以通过总线接口将处理结果返回给ARM处理器。
这种方式可以实现高速的数据传输和灵活的任务分配,提高系统的整体性能。
在联合设计中,需要将ARM处理器的软件编程与FPGA的硬件编程相结合。
fpga与arm之间的大量数据传输
fpga与arm之间的大量数据传输FPGA(Field Programmable Gate Array)和ARM(Advanced RISC Machine)是两种常用于嵌入式系统开发的技术。
FPGA是一种可编程逻辑芯片,可以按照用户的需求进行定制化的硬件实现,而ARM 则是一种基于RISC架构的微处理器核心,广泛应用于移动设备和嵌入式系统中。
在某些应用场景下,需要在FPGA和ARM之间进行大量数据传输,本文将探讨这种数据传输的相关问题。
我们需要了解FPGA和ARM之间的数据传输方式。
一种常见的方式是通过直接内存访问(DMA)来实现。
DMA是一种无需CPU干预的数据传输方式,通过配置DMA控制器,可以在FPGA和ARM之间建立一个高速数据传输通道。
ARM可以通过配置DMA控制器的寄存器来指定数据传输的起始地址、传输长度和传输方向等参数,然后由DMA控制器负责实际的数据传输操作。
这种方式能够大大提高数据传输的效率,减轻CPU的负担。
在进行FPGA和ARM之间的数据传输时,需要考虑一些重要的因素。
首先是数据传输的带宽。
带宽是指单位时间内可以传输的数据量,通常以比特率或字节率来衡量。
对于大量数据传输来说,高带宽是非常重要的,可以保证数据能够及时传输完成,提高系统的响应速度。
其次是数据传输的稳定性。
在高速数据传输过程中,由于电磁干扰、时钟偏差等原因,可能会导致数据传输的错误。
因此,需要采取一些措施来保证数据传输的稳定性,例如使用差错校验码、时钟同步等技术。
FPGA和ARM之间的数据传输还需要考虑数据的格式和协议。
数据格式是指数据在传输过程中的组织方式,例如二进制、十六进制、ASCII码等。
不同的应用场景可能需要采用不同的数据格式。
协议是指数据传输过程中的规则和约定,例如数据的起始标志、传输顺序、错误处理等。
常用的数据传输协议有UART、SPI、I2C、Ethernet等。
选择合适的数据格式和协议可以提高数据传输的效率和可靠性。
FPGA与ARM的关系

区别:⒈我做个比喻吧,ARM呢就像是一个设计好的办公楼,那个部门负责什么事情都是定好的,你要做的就是合理调配部门资源合理搭配来完成你的目的。
FPGA呢就是给你一大堆建筑材料和人员,你要它建成什么样子它就是什么样子⒉FPGA就像是一张白纸,里面可以写自己想要的逻辑,只要FPGA的逻辑门数够多,里面跑个ARM核还是很简单的。
ARM是ASIC吧,专用芯片,只能使用。
⒊DSP主要用做运算,如语音,图像等信号的运算处理,但基本不用做控制。
MCU,FPGA,ARM主要用做控制,MCU低价低功耗,但门限很少,结构简单,不能实现复杂控制。
ARM控制能力较强,但运算能力相对较弱。
因此现在很多手持设备是用ARM+DSP来实现的,就是所谓的“双核心”。
FPGA可做复杂的逻辑控制,功能很强大。
⒋单片机(MCU),又称为微控制器,在一块半导体芯片上集中了CPU,ROM,RAM,I/O Interface, timer/counter, interrupt system, 构成一台完整的数字计算机ARM(Advanced RISC Machines)是微处理器行业的一家知名ARM企业,设计了大量高性能、廉价、耗能低的RISC处理器、相关技术及软件。
ARM架构是面向低预算市场设计的第一款RISC微处理器,基本是32位单片机的行业标准,它提供一系列内核、体系扩展、微处理器和系统芯片方案,四个功能模块可供生产厂商根据不同用户的要求来配置ARM生产。
由于所有产品均采用一个通用的软件体系,所以相同的软件可在所有产品中运行。
目前ARM在手持设备市场占有90以上的份额,可以有效地缩短应用程序开发与测试的时间,也降低了研发费用。
这里有一篇介绍ARM结构体系发展介绍。
DSP(digital singnal processor)是一种独特的微处理器,有自己的完整指令系统,是以数字信号来处理大量信息的器件。
一个数字信号处理器在一块不大的芯片内包括有控制单元、运算单元、各种寄存器以及一定数量的存储单元等等,在其外围还可以连接若干存储器,并可以与一定数量的外部设备互相通信,有软、硬件的全面功能,本身就是一个微型计算机。
ARM与FPGA通用GPMC总线接口设计实现

ARM与FPGA通用GPMC总线接口设计实现引言:随着计算机科学的不断发展,特别是嵌入式系统的迅速发展,ARM和FPGA的结合越来越受到关注。
ARM作为一种高性能、低功耗的处理器,广泛应用于移动设备、智能家居和工业自动化等领域。
而FPGA则具有灵活可重构的特点,可以实现各种不同的数字电路和逻辑功能。
为了实现ARM与FPGA之间的通信,我们可以采用GPMC(General-Purpose Memory Controller)总线接口。
GPMC是一种高性能、灵活的AMBA(ARM Advanced Microcontroller Bus Architecture)总线接口,主要用于处理大容量主存储器和外部设备的访问。
设计思路:1.通过FPGA实现GPMC总线控制器,与ARM处理器相连。
2.根据GPMC总线协议规范,实现数据、地址、控制和时钟信号的交互。
3.通过GPMC总线控制器,实现ARM与FPGA之间的数据传输和通信。
设计细节:1.GPMC总线控制器的设计:-实现GPMC总线接口的时序控制逻辑,包括数据传输的读写控制和时钟同步。
-实现对外设的地址和数据的读写控制。
-实现GPMC总线控制器与ARM处理器的接口逻辑。
2.GPMC总线接口的数据传输:-对于数据的读取,ARM发送读命令和地址给GPMC控制器,控制器从外设读取数据,并将数据发送给ARM。
-对于数据的写入,ARM发送写命令、地址和数据给GPMC控制器,控制器将数据写入外设。
3.GPMC总线接口的时钟同步:-ARM和FPGA可能有不同的时钟频率,需要实现时钟同步。
- 可以使用FPGA中的PLL(Phase-Locked Loop)模块,将ARM的时钟频率转换为与FPGA相同的频率。
4.GPMC总线接口的地址映射:-ARM和FPGA之间的地址映射需要一致,以确保ARM访问FPGA上的正确地址。
-可以通过使用地址转换模块来实现地址映射。
5.GPMC总线接口的信号标准:-GPMC总线接口的信号标准需要符合AMBA总线接口规范。
ARM与FPGAGPMC总线接口设计实现

ARM与FPGAGPMC总线接口设计实现ARM(Advanced RISC Machine)与FPGA(Field Programmable Gate Array)GPMC(General-Purpose Memory Controller)总线接口设计实现是一种常见的系统级组件互连方式。
在许多嵌入式系统中,ARM处理器与FPGA协同工作以提供更高性能和更多功能。
通过设计和实现一个高效的总线接口,ARM处理器和FPGA可以有效地通信,实现数据传输和协作计算。
在设计ARM与FPGAGPMC总线接口时,需要考虑以下几个方面:1.电气特性:ARM和FPGA之间的总线接口需要考虑电平匹配、时序一致性等电气特性。
通常采用LVCMOS电平进行通信,同时需要保证时钟信号和数据信号的稳定性和可靠性。
2.信号传输:ARM处理器和FPGA之间的通信通路可以通过多种方式,如并行总线、串行总线、DMA等。
在设计总线接口时,需要选择合适的信号传输方式,并进行信号映射和协议转换。
3.性能优化:通过合理设计总线接口,可以优化数据传输性能,提高系统的吞吐量和响应速度。
可以采用FIFO缓冲、流水线设计等技术来提高数据传输效率。
4.数据传输协议:ARM和FPGA之间的通信需要定义数据传输协议,包括数据帧结构、数据标识符、校验和错误处理等。
通常采用标准协议如AHB、AXI等,也可以根据具体需求设计自定义协议。
基于以上考虑,下面介绍一种ARM与FPGAGPMC总线接口的设计实现方案:1.电气特性:采用LVCMOS电平进行信号传输,确保电平匹配和时序一致性。
使用适当的阻抗匹配和信号波形调整电路来提高信号质量。
2.信号传输:采用高速并行总线进行ARM和FPGA之间的数据传输。
通过并行总线数据线和控制线的映射,实现ARM处理器与FPGAGPMC之间的通信。
3.性能优化:设计FIFO缓冲器和数据流水线,提高数据传输效率。
在ARM处理器和FPGA之间增加数据缓冲和流水线处理,减少传输延迟和提高系统响应速度。
ARM与FPGA的接口实现解析

ARM与FPGA的接口实现解析ARM与FPGA(Field-Programmable Gate Array)的接口实现是指通过特定的硬件和软件设计,将ARM处理器与FPGA芯片进行连接和通信的方式。
ARM处理器是一种常见的嵌入式处理器,而FPGA芯片则是一种可编程逻辑器件,可以根据需要进行逻辑电路的重构。
1. AXI接口:AXI(Advanced eXtensible Interface)是ARM公司提供的一种高性能、低功耗的接口标准。
通过使用AXI接口,可以实现ARM和FPGA之间的高速数据传输和控制信号传递。
AXI接口提供了多个通道,包括数据通道、地址通道和控制通道,可以实现高效的数据交换。
2. AHB接口:AHB(Advanced High-performance Bus)是ARM公司提供的另一种接口标准。
AHB接口在ARM处理器和FPGA之间提供了广泛的数据和控制信号传输功能。
AHB接口可以用于实现不同速度和带宽要求的系统,同时还支持多个主设备和从设备的连接。
3. GPIO接口:GPIO(General Purpose Input/Output)接口是一种通用的数字输入/输出接口。
通过使用GPIO接口,可以实现ARM和FPGA 之间的简单的数字信号传输,例如控制信号、状态信号等。
GPIO接口通常通过引脚来实现,可以通过软件编程来控制引脚的输入和输出。
4. DMA接口:DMA(Direct Memory Access)接口是一种用于高速数据传输的接口。
通过使用DMA接口,可以实现ARM和FPGA之间的数据直接传输,减少了处理器的负载和延迟。
DMA接口通常使用内存缓冲区来存储数据,可以通过软件编程来控制数据的传输和处理。
5. UART接口:UART(Universal AsynchronousReceiver/Transmitter)接口是一种常见的串行通信接口。
通过使用UART接口,可以实现ARM和FPGA之间的串行数据传输。
arm和fpga pcie 原理

arm和fpga pcie 原理ARM和FPGA之间的PCIE原理引言:现代计算机设计中采用多种不同类型的处理器和器件来实现各种功能。
ARM处理器和FPGA(Flexible Programme Gate Array)是广泛使用的两种不同类型的设备。
在一些应用中,需要将这两种设备结合在一起以实现更高的性能和灵活性。
PCIe(Peripheral Component Interconnect Express)总线协议是一种流行的用于在计算机系统中连接设备的接口标准。
本文将详细介绍ARM和FPGA之间使用PCIE进行通信的原理。
第1节:ARM和FPGA的基本介绍1.1 ARM处理器ARM处理器是一种广泛使用的32位RISC(Reduced Instruction Set Computing)架构处理器。
ARM处理器主要用于嵌入式系统和移动设备。
它以其低功耗、高性能和低成本而闻名,并且有多个系列和型号可供选择。
1.2 FPGA芯片FPGA芯片是一种可编程逻辑器件,其内部由大量可编程的逻辑元件和可编程的互连通道组成。
FPGA芯片可以按照设计者的需求进行配置,以实现各种不同的功能。
它具有灵活性和可重构性的特点,因此被广泛应用于数字电路设计和系统开发中。
第2节:PCIE总线介绍2.1 PCIE总线概述PCIe总线是一种高速串行总线协议,用于在计算机系统中连接各种外部设备。
它具有高带宽、低延迟和可扩展性的特点,能够满足现代计算机系统对数据传输的高要求。
2.2 PCIE总线工作原理PCIE总线采用点对点的拓扑结构,其中包括一个主控制器和多个从设备。
主控制器负责发起传输请求,并将数据发送到指定的从设备,从设备接收数据后进行处理。
PCIE总线采用多通道传输,可以同时进行多个并行数据传输,以提高总线带宽。
第3节:ARM和FPGA之间的PCIE通信原理3.1 ARM和FPGA之间的连接为了实现ARM和FPGA之间的PCIE通信,需要将PCIE适配器连接到ARM处理器和FPGA芯片之间。
FPGA-ARM通信代码
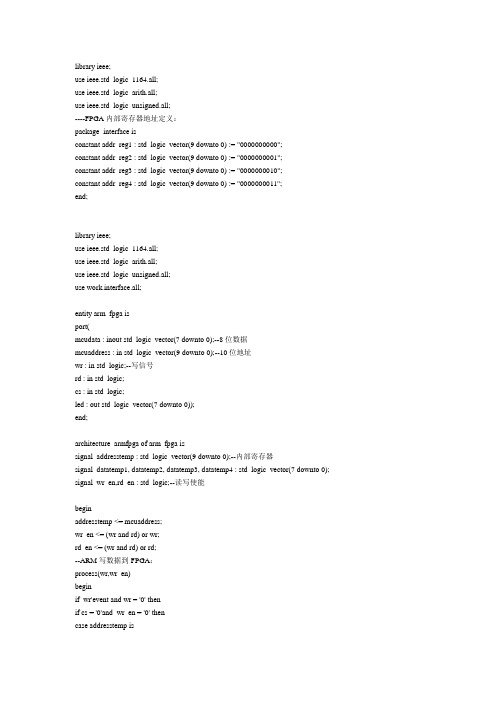
library ieee;use ieee.std_logic_1164.all;use ieee.std_logic_arith.all;use ieee.std_logic_unsigned.all;----FPGA内部寄存器地址定义:package interface isconstant addr_reg1 : std_logic_vector(9 downto 0) := "0000000000";constant addr_reg2 : std_logic_vector(9 downto 0) := "0000000001";constant addr_reg3 : std_logic_vector(9 downto 0) := "0000000010";constant addr_reg4 : std_logic_vector(9 downto 0) := "0000000011";end;library ieee;use ieee.std_logic_1164.all;use ieee.std_logic_arith.all;use ieee.std_logic_unsigned.all;use work.interface.all;entity arm_fpga isport(mcudata : inout std_logic_vector(7 downto 0);--8位数据mcuaddress : in std_logic_vector(9 downto 0);--10位地址wr : in std_logic;--写信号rd : in std_logic;cs : in std_logic;led : out std_logic_vector(7 downto 0));end;architecture armfpga of arm_fpga issignal addresstemp : std_logic_vector(9 downto 0);--内部寄存器signal datatemp1, datatemp2, datatemp3, datatemp4 : std_logic_vector(7 downto 0); signal wr_en,rd_en : std_logic;--读写使能beginaddresstemp <= mcuaddress;wr_en <= (wr and rd) or wr;rd_en <= (wr and rd) or rd;--ARM写数据到FPGA:process(wr,wr_en)beginif wr'event and wr = '0' thenif cs = '0'and wr_en = '0' thencase addresstemp iswhen addr_reg1 =>datatemp1 <= mcudata;when addr_reg2 =>datatemp2 <= mcudata;when addr_reg3 =>datatemp3 <= mcudata;when addr_reg4 =>datatemp4 <= mcudata;when others => null;end case;end if;end if;end process;--ARM从FPGA读取数据:process(rd,rd_en)beginif rd'event and rd = '0' thenif cs = '0' and rd_en = '0' thencase addresstemp iswhen addr_reg1 =>mcudata <= datatemp1;when addr_reg2 =>mcudata <= datatemp2;when addr_reg3 =>mcudata <= datatemp3;when addr_reg4 =>mcudata <= datatemp4;when others => null;end case;end if;end if;end process;led <= mcudata; --验证传输数据,LED显示end;-- mcufpga.vhdlibrary ieee;use ieee.std_logic_1164.all;use ieee.std_logic_arith.all;use ieee.std_logic_unsigned.all;----FPGA内部寄存器地址定义:package interface isconstant addr_reg1 : std_logic_vector(9 downto 0) := "0000000000"; constant addr_reg2 : std_logic_vector(9 downto 0) := "0000000001"; constant addr_reg3 : std_logic_vector(9 downto 0) := "0000000010"; constant addr_reg4 : std_logic_vector(9 downto 0) := "0000000011"; end;library ieee;use ieee.std_logic_1164.all;use ieee.std_logic_arith.all;use ieee.std_logic_unsigned.all;use work.interface.all;entity arm_fpga isport(mcudata : inout std_logic_vector(7 downto 0);--8位数据mcuaddress : in std_logic_vector(9 downto 0);--10位地址wr : in std_logic;--写信号rd : in std_logic;cs : in std_logic;led : out std_logic_vector(7 downto 0));end;architecture armfpga of arm_fpga issignal addresstemp : std_logic_vector(9 downto 0);--内部寄存器signal datatemp : std_logic_vector(31 downto 0);--signal wr_en,rd_en : std_logic;--读写使能beginaddresstemp <= mcuaddress;--ARM写数据到FPGA:process(wr,cs)begin--datatemp1 <= mcudata when (cs= '0' and wr = '0' and addresstemp = addr_reg1); if wr'event and wr = '0' and cs = '0' thencase addresstemp iswhen addr_reg1 => datatemp(7 downto 0) <= mcudata;when addr_reg2 => datatemp(15 downto 8) <= mcudata;when addr_reg3 => datatemp(23 downto 16) <= mcudata;when addr_reg4 => datatemp(31 downto 24) <= mcudata;when others => null;end case;end if;end process;--ARM从FPGA读取数据:process(rd,cs)beginif rd'event and rd = '0' and cs = '0' then--case addresstemp is--when addr_reg1 => mcudata <= datatemp(7 downto 0);--when addr_reg2 => mcudata <= datatemp(15 downto 8);--when addr_reg3 => mcudata <= datatemp(23 downto 16);--when addr_reg4 => mcudata <= datatemp(31 downto 24);--when others => mcudata <= "ZZZZZZZZ";mcudata <=datatemp(7 downto 0) when (addresstemp = addr_reg1) elsedatatemp(15 downto 8) when (addresstemp = addr_reg2) elsedatatemp(23 downto 16) when (addresstemp = addr_reg3) elsedatatemp(31 downto 24) when (addresstemp = addr_reg4) else "ZZZZZZZZ";end case;end if;end process;led <= mcudata;end;-- mcufpga.vhdlibrary ieee;use ieee.std_logic_1164.all;use ieee.std_logic_unsigned.all;entity arm_fpga isport(mcudata : inout std_logic_vector(7 downto 0);--8位数据mcuaddress : in std_logic_vector(9 downto 0);--10位地址wr : in std_logic;--写信号rd : in std_logic;cs : in std_logic;led : out std_logic_vector(7 downto 0));end;architecture armfpga of arm_fpga issignal addresstemp : std_logic_vector(1 downto 0);--内部寄存器signal datatemp : std_logic_vector(31 downto 0);beginaddresstemp <= mcuaddress(1 downto 0);--ARM写数据到FPGA:datatemp(7 downto 0) <= mcudata when( cs='0' and wr='0' and addresstemp = "00"); datatemp(15 downto 8) <= mcudata when( cs='0' and wr='0' and addresstemp = "01"); datatemp(23 downto 16) <= mcudata when( cs='0' and wr='0' and addresstemp = "10"); datatemp(31 downto 24) <= mcudata when( cs='0' and wr='0' and addresstemp = "11");--ARM从FPGA读取数据:mcudata <= datatemp(7 downto 0) when( cs='0 and rd='0' and addresstemp = "00") else datatemp(15 downto 8) when( cs='0 and rd='0' and addresstemp = "01") elsedatatemp(23 downto 16) when( cs='0 and rd='0' and addresstemp = "10") elsedatatemp(31 downto 24) when( cs='0 and rd='0' and addresstemp = "11") else"ZZZZZZZZ"; -- "ZZ"不可少,否则总线被FPGA锁死.led <= mcudata;end armfpga ;library ieee;use ieee.std_logic_1164.all;use ieee.std_logic_unsigned.all;entity arm_fpga isport(mcudata : inout std_logic_vector(7 downto 0);--8位数据mcuaddress : in std_logic_vector(9 downto 0);--10位地址wr : in std_logic;--写信号rd : in std_logic;cs : in std_logic;led : out std_logic_vector(7 downto 0));end;architecture armfpga of arm_fpga isconstant addr_reg1 : std_logic_vector(9 downto 0) := "0000000000"; constant addr_reg2 : std_logic_vector(9 downto 0) := "0000000001"; constant addr_reg3 : std_logic_vector(9 downto 0) := "0000000010"; constant addr_reg4 : std_logic_vector(9 downto 0) := "0000000011";signal addresstemp : std_logic_vector(9 downto 0);--内部寄存器signal datatemp : std_logic_vector(31 downto 0);--signal wr_en,rd_en : std_logic;--读写使能beginaddresstemp <= mcuaddress;--ARM写数据到FPGA:process(wr,cs)beginif( wr'event and wr = '0' )thenif( cs = '0') thencase addresstemp iswhen addr_reg1 => datatemp(7 downto 0) <= mcudata;when addr_reg2 => datatemp(15 downto 8) <= mcudata;when addr_reg3 => datatemp(23 downto 16) <= mcudata;when addr_reg4 => datatemp(31 downto 24) <= mcudata;when others =>datatemp<=(others=>'0');end case;elsedatatemp<=(others=>'0');end if;end if;end process;--ARM从FPGA读取数据:process(rd,cs)beginif (rd'event and rd = '0' ) thenif (cs = '0')thencase addresstemp iswhen addr_reg1 => mcudata<=datatemp(7 downto 0); when addr_reg2 => mcudata<=datatemp(15 downto 8); when addr_reg3 => mcudata<=datatemp(23 downto 16); when addr_reg4 => mcudata<=datatemp(31 downto 24); when others=>mcudata<="ZZZZZZZZ";end case;elsemcudata<="ZZZZZZZZ";end if;end if;end process;led <= mcudata;end;。
详解ARM处理器和FPGA之间的通信技术

详解ARM处理器和FPGA之间的通信技术1前言在ARM+FPGA系统结构中,实现基于ARM的嵌入式处理器和FPGA之间通信最简单的方法就是通过异步串行接口EIARS232C。
考虑选用集成有UART(Universal Asynchronous Receiver / TraNSmitter )控制器的嵌入式处理器(例如,EP7312),那么嵌入式处理器一侧就具有了利用异步串行接口收、发通信的能力。
然而,FPGA内部并不拥有CPU控制单元,无法处理由UART控制器产生的中断,所以FPGA 一侧不能利用现成的UART控制器构成异步串行接口,必须将UART控制器的功能集成到FPGA内部。
同一个系统中的ARM与FPGA之间属于短距离通信连接,他们之间的异步串行通信并不需要完整的UART功能,那些RS232标准中的联络控制信号线可以省略,仅仅保留收、发数据线和地线,这样给UART功能的FPGA编程实现带来了极大的省略。
嵌入式处理器EP7312带有2个支持异步串行通信RS232的16550类型的UART,UART1不仅有TX,RX,而且支持Modem控制信号,UART2只有标准的TX,RX以及地信号,刚好能够利用UART2与FPGA实现通信。
2简化UART功能的FPGA实现本文将详细地讨论简化UART功能在FPGA中的实现方法。
简单回顾一下异步串行通信的数据格式。
图2表明在异步传送中串行发送一个数据字节的位定时关系(图中没有包括奇偶校验位)。
发送一个完整的字节信息,首先是一个作为起始位的逻辑0位,接着是8个数据位,然后是1个、1+1/2个或2个停止位逻辑1位,数据线空闲时呈现为高或1状态。
在字符的8位数据部分,先发送数据的最低位,最后发送最高位。
每位持续的时间是固定的,由发送器本地时钟控制,每秒发送的数据位个数,即为波特率。
起始位和停止位起着很重要的作用。
显然,他们标志每个字符的开始和结束,但更重要的是他们使接收器能把他的局部时钟与每个新开始接收的字符再同步。
基于ARM与FPGA高速数据通信接口设计

基于ARM与FPGA高速数据通信接口设计朱望纯;张硕;蒋汉林【摘要】In view of high speed and real-time performance of data acquisition equipment,a high speed data communication in-terface based on S3C6410 ARM processor and FPGA is designed and implemented.The interface uses SPI bus to complete the control signal interaction between FPGA and ARM,and uses dual port RAM to complete data transmission.The design solves the problem of data processing speed mismatch between ARM and FPGA,and has the characteristics of high speed and real-time performance.The test results show that the system is easy to operate and can be used in the field of instrument control and electronic measurement.%针对数据采集仪器设备信号要求高速、实时,设计并实现了基于S3C6410 ARM处理器和FPGA的高速数据通信接口.接口通过SPI总线完成FPGA和ARM之间控制信号交互,采用双口RAM完成数据上传.该设计解决了ARM与FPGA的数据处理速度不匹配问题,具备高速、实时性等优点.测试结果表明,系统操作简单,功能正常,可应用于仪器控制和电子测量领域.【期刊名称】《桂林电子科技大学学报》【年(卷),期】2017(037)004【总页数】5页(P293-297)【关键词】高速数据;SPI总线;双口RAM;FPGA【作者】朱望纯;张硕;蒋汉林【作者单位】桂林电子科技大学电子工程与自动化学院,广西桂林 541004;桂林电子科技大学电子工程与自动化学院,广西桂林 541004;陆军装备部武汉军代局驻八〇一厂军代室,广西柳州 545012【正文语种】中文【中图分类】TP336随着仪器性能要求的提高,仪器功能的进一步拓展,仪器控制的实时性、采样速度、精度、存储等要求也越来越高[1]。
ARM+FPGA组成的PLC结构的通信系统
通 信 功 能 . 详 细分 析 P C 主机 在 上 电 、 辑 状 态 和 程 序 执 行 时 的 通 信 需 求 与 特 点 的 基 础 上 , 范 了通 信 内 容 达 到 通 在 L 编 规 信 系统 的通 用 性 , 计 内容 主 要 包 括 通 信 协 议 与 通 信 标 识 符 格 式 的 设 计 ,L 设 P C主 机 通 信 软 件 模 块 的 组 成 与 操 作 流 程 C N通 信 发 送 和接 收信 息处 理任 务程 序 流 程 的设 计 等. 试 验 验 证 表 明 : 系 统 最 终 可 满 足 P C主 机 与 各 功 能 模 块 A 经 该 L 间 不 同 的通 信 要 求 , 现 P C系 统 实 时 可靠 的通 信 . 实 L 关键 字 :R :A 通信 ; 信 协议 ; 识 符 AM CN 通 标
第2 3卷 第 1 期
21 0 2年 3月
广 西 工 学 院 学 报
J RNAL OF G OU UANGXIUNI VERST EC 0L I Y 0FT HN 0GY
Vo .3 No. I2 1
Ma . 0 2 r2 1
文章编号 10 —4 0 2 1 )10 1.6 0 46 1 (0 2 0 —0 40
要 与 编 程装 置 通信 ,其通 信 任 务 主要 有 : L P C主机 从 编程 装 置 下 载 P C用 户程 序 ;L L P C主 机 向编 程 装 置 发 送 P C主 机 中 的用户 程 序 ; 应编 程 装 置读 取 P C 的各 种 软 元 件信 息 的请 求 , L 响 L 如 果 需 要读 取 的软元 件 在 P C主机 中 , L L P C主机 直 接 通 过 C N总 线 传输 该 软元 件 的 信 息 ,如 果 是 在 A
《ARM和FPGA协同实现高速Hadamard单像素相机的研究》

《ARM和FPGA协同实现高速Hadamard单像素相机的研究》篇一ARM与FPGA协同实现高速Hadamard单像素相机的研究摘要:本文着重探讨了ARM与FPGA协同工作,在实现高速Hadamard单像素相机中的应用。
首先,我们概述了单像素相机的原理及其在高速成像领域的重要性。
随后,详细介绍了ARM与FPGA的各自优势及其在系统中的具体应用,并详细阐述了Hadamard变换在单像素成像中的关键作用。
最后,通过实验验证了该系统的性能,并对其在实时图像处理中的潜在应用进行了展望。
一、引言随着科技的发展,单像素相机因其高灵敏度、低功耗等优点在众多领域得到了广泛应用。
其中,Hadamard变换因其独特的数学特性在单像素成像中发挥了重要作用。
然而,要实现高速的图像处理和传输,仅依靠单一的处理器难以满足需求。
因此,本文提出了ARM与FPGA协同实现高速Hadamard单像素相机的方案。
二、单像素相机原理及Hadamard变换单像素相机通过单次测量获取图像的全部信息,其核心在于利用压缩感知理论对图像进行编码和解码。
Hadamard变换作为压缩感知理论中的一种重要手段,能够在频域内对图像进行高效的编码。
其原理是将图像数据经过Hadamard变换后,利用测量矩阵与原始数据的内积进行重构,从而获得高分辨率的图像。
三、ARM与FPGA的协同应用(一)ARM处理器优势与应用ARM处理器具有强大的控制能力和高效的算法处理能力。
在单像素相机系统中,ARM主要负责控制整个系统的运行,包括数据采集、传输、存储以及与FPGA的通信等任务。
此外,ARM还可以对采集到的图像数据进行初步处理和分析。
(二)FPGA优势与应用FPGA(现场可编程门阵列)具有并行计算、高带宽、低功耗等优点。
在单像素相机系统中,FPGA主要负责高速图像处理和传输任务。
通过配置FPGA内部的逻辑单元,可以实现复杂的算法运算和数据处理,从而大大提高系统的处理速度和效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在数据采集卡中ARM主要负责数据显示和数据分析,处理的速度处于MS 级;而FPGA在系统中处于数据的高速采集和高速处理,处理的速度是ns级。
两个处理器的之间的数据传输属于典型的异步数据通信,它们之间通信的速度之间决定了系统处理数据的效率。
FPGA与ARM之间属于大量数据交换,以异步并行读取的方式为例介绍ARM与FPGA的通信,实际设计中使用DMA方式来实现ARM 与FPGA之间的大数据量通信。
ARM存储系统分析
S3C2410A存储控制器提供访问外部存储器所需要的存储器控制信号。
S3C2410A支持大、小端模式,将存储空间分为8个组(Bank),每组大小是128M,共计1GB,如图1所示。
所有存储器组都可用于ROMA或者SRAM,Bank6、Bank7还可以用于SDRAM。
所有内部块的访问周期都可编程。
总线访问周期可以通过插入外部等待来延长,支持SDRAM的自刷新和掉电模式。
Bank0~Bank6的开始地址是固定的,Bank7的开始地址是Bank6的结束地址,灵活可变,并且Bank7的大小与Bank6的大小必须相等。
除Bank0外,其余各存储器的总线宽度可编程设置为8位、16位或者32位,但是Bank0只支持16位或者32位。
Bank0作为引导ROM,地址映射到0x0000_0000。
OM[1:0]是系统的引导模式控制引脚,在复位时,系统将检测OM[1:0]上的逻辑电平,并根据这个电平来决定Bank0区存储器的总线宽度。
图1 ARM存储单元分配图
在设计中ARM的bank0用于Nor Flash,bank6和bank7用于两块SDRAM,我们选择bank4作为FPGA内部RAM映射的空间。
Bank4在ARM的统一基地址为0x20000000,后面的采集的数据都是基于这个地址为首地址的。
EP3C25基于SRAM结构,器件内部自带RAM,容量最大达到594Kbit。
为了方便ARM与FPGA通信,在FPGA上建立一个8Kbit的RAM数据缓冲区,将AD采集的数据缓冲在这8Kbit的RAM中,将ARM的数据总线和地址总线与RAM 缓冲区构建的双口RAM的数据线、地址线直接相连,使用总线访问FPGA内部RAM 就可以达到高速数据读取的目的。
这种结构下相当于将采集到的数据直接存储到S3C2410的系统内存中,从而节省了数据传输的时间,大大提高了系统的效率。
如上图4-2所示ARM存储系统的结构图,ARM与外部存储器相连时,必须先给其分配在一个固定的Bank,本设计将FPGA内的缓冲区指定在Bank4上,地址范围从0x2000_0000到0x2000_1000。
使用片选引脚nGCS4、读引脚nOE和写引脚nWE 即可完成对FPGA内存储空间的读写。
ARM读取双口RAM中的数据
被测信号经过AD9480转换后,需要将转换后的数据进行存储,这是数字存储示波器与模拟示波器的区别之一。
对于数据的存储方案主要有FIFO和双端口RAM两种。
第一种使用FIFO方案,其特点是数据存储格式是先入先出,可以省去地址总线,只需要将数据按照一定的时钟写入存储单元,数据的读取相同。
第二种是双端口RAM方案,其特点是需要两个独立的数据总线、地址总线和控制总线;一方在写入的时候,另一方可以进行数据的读取。
由于需要读取存储器中某个“特定”位置的数据,所以必须使用地址线,所以后端的存储器选择双口RAM。
图2 双口RAM与ARM总线连接图
上图2是双口RAM与ARM总线连接图,双口RAM的地址线addr[8..0]与ARM的地址线的低九位相连,nOE取反后作为双口RAM的读取时钟,双口RAM的数据输出q经过一个八位的三态缓冲器输出。
如图ARM读取信号nOE低电位有效,而双口RAM的读时钟为上升沿有效,为了得到合适的读取时序,我们将nOE取反后作为双口RAM的读取时钟。
输出数据总线与ARM的数据总线连接,若直接连接共享存储区的数据总线会长期占用ARM的数据总线,会造成CPU无法运行。
在两个数据总线中加一个三态缓冲器,以取反的nOE 为三态门的选通信号后问题既可以解决。
以读取操作为例,ARM读取外部存储器的时序图如下图3所示,针对FPGA 内部缓冲区的读取,下面通过一个最基本的读语句来分析ARM读取的过程。
图3 ARM读取外部存储器的时序图
以程序a[0] = *0x20000000为例,这条程序是将地址0x20000000地址中的数据赋给a[0],地址0x20000000为bank4的首地址,当程序需要访问bank4地址空间内的数据时,操作步骤如下:
在接下来的时钟上升沿,将需要访问的地址赋给地址总线。
在第二个周期选通访问地址所在bank的片选,即nGCS4拉低。
在第三个周期将nOE拉低,给出发出读取信号。
在第四个周期,将访问地址中的数据赋给数据总线。
由于整个调试过程都在SDRAM中运行,而a[0]也是在SDRAM中由编译器指定一个地址,因此在读操作完成后,紧接着的是向SDRAM中某个地址赋值的写操作,所以片选信号和读信号在读操作完成后立即被拉高了。
设计中真是使用了读信号nOE在读一次时产生的这个下降沿,将其取反做为双口RAM的读时钟。
当nOE上升沿时,要读取的地址正占据着地址总线,地址被送到双口RAM的读地址,得到双口RAM内的数据,被送到数据总线上,ARM数据总线接收数据。
经过若干个周期的读取即可完成ARM与FPGA之间的数据读取。