海拉EPS角度传感器
EPS工作原理
EPS工作原理EPS,即电子功率转向系统(Electric Power Steering),是一种通过电子设备来辅助驾驶员转动方向盘的系统。
它通过感应车辆的转向力和速度,并利用电动机来提供相应的辅助力,使得驾驶员在转动方向盘时感到更轻松和舒适。
EPS系统由以下几个主要组成部分构成:转向传感器、控制单元、电机和助力器。
下面将详细介绍每个部分的功能和工作原理。
1. 转向传感器:转向传感器主要用于感知驾驶员的转向意图和车辆的转向角度。
它通常由角度传感器和扭矩传感器组成。
角度传感器测量方向盘的转动角度,而扭矩传感器测量驾驶员对方向盘施加的扭矩。
这些传感器将转向信息传输给控制单元,以便系统能够根据驾驶员的意图进行相应的调整。
2. 控制单元:控制单元是EPS系统的核心部分,负责处理来自转向传感器的信号,并根据这些信号来控制电机的工作。
它通过算法和逻辑判断来确定驾驶员的转向意图,并相应地调整电机的输出。
控制单元还可以根据车辆的速度和其他参数来调整辅助力的大小,以提供最佳的驾驶体验。
3. 电机:EPS系统中的电机通常是一种直流无刷电机,它被安装在转向机构上,并与转向轴相连。
电机的主要作用是提供辅助力,以减轻驾驶员转动方向盘的力量。
根据控制单元的指令,电机会产生相应的扭矩,使得方向盘更容易转动。
电机还可以根据驾驶员的转向意图和车辆的运动状态进行动态调整,以提供更精确的辅助力。
4. 助力器:助力器是EPS系统中的一个重要组成部分,它通过机械装置将电机的输出力转化为实际施加在转向轮上的力。
助力器通常由齿轮、齿条和滑块等部件组成,它们的设计和布局可以根据车辆的类型和性能需求而有所不同。
助力器的作用是将电机产生的扭矩传递到转向轮上,使得驾驶员能够更轻松地转动方向盘。
EPS工作原理的基本流程如下:1. 驾驶员转动方向盘时,转向传感器会感知到方向盘的转动角度和驾驶员施加的扭矩。
2. 转向传感器将转向信息传输给控制单元。
3. 控制单元根据转向信息和其他参数,通过算法和逻辑判断,确定驾驶员的转向意图,并计算出相应的辅助力大小。
海拉的雨量、环境光、阳光三合一传感器产品评估-文档资料

目录
一、海拉产品介绍 二、技术应用性评估 三、技术应用风险点
一、海拉产品介绍
产品外型及技术参数:
支持功能:
雨量传感器: 自动检测外部雨量大小,实现自动雨刮; 环境光传感器和隧道传感器: 自动检测外部环境光强,控制大灯、小灯开和关; 阳光传感器: 自动检测太阳的辐射强度,实现自动空调的恒温控制。
二、技术应用性评估
2、阳光传感器 由空调工程师与供应商确认后,有如下两个技术点待确认: 海拉的阳光传感器布置的风挡玻璃中间,如何实现双区太阳辐射强度的自动 检测; 阳光传感器的光检测强度范围确认; 产品详细技术参数文件
3、安装要求 与内外饰工程师分别确认前风挡玻璃和内后视镜的安装要求,确认满足NL-2要 求,有待确认点: 海拉周五将传感器3D数据提供给吉利进行初步布置;
一、海拉产品介绍
产品的安装与布置:传感器通过支架紧贴在内后视镜附近的前风挡玻璃面上。
传感器
技术应用特点: 1、雨量/环境光/阳光传感器三合一; 2、三个传感器均为LIN通讯; 3、可根据各种玻璃自适应调整软件; 产品型号及成本: 三合一产品成本约100元/件; 其他二合一产品未推荐。
二、技术应用性评估
1、LIN通讯接口确认及评估
雨量传感器:已确认通讯信息,将根据吉利已有的LIN信号矩阵
进行修改; 环境光传感器:已确认通讯信息完毕,将根据吉利已有的LIN信
号矩阵进行修改;
阳光传感器: 阳光传感器信号将采用通过BCM的CAN/LIN网关来与空调ECU传 递通讯信号,CAN和LIN的信号有待确认及编制。
结论:如采用海拉的三合一产品,必须要求海拉同时提供技术成熟且成本较低的环 境光/阳光的二合一产品。
一种基于eps的tis角度传感器快速找零及标零的方法与流程

一种基于eps的tis角度传感器快速找零及标零的方法与流程基于EPS(电子助力转向系统)的TIS(转角传感器)快速找零及标零的方法和流程如下:
1. 准备工作:
a. 确保车辆处于停止状态,发动机熄火。
b. 确保EPS系统处于正常工作状态。
2. 进入找零模式:
a. 通过车辆上的操作按钮或仪表盘上的控制杆,选择进入找零模式。
b. 根据车辆的具体型号和操作方式,按照操作手册上的指示进行操作。
3. 执行找零过程:
a. 在找零模式下,将方向盘从端点位置转到另一端点位置,然后回到中立位置。
b. 根据提示,逐步将方向盘从一个极限位置转到另一个极限位置,并再次回到中立位置。
c. 这个过程将使TIS传感器记录车辆在各个转角位置的数值。
4. 标零过程:
a. 在找零模式下,根据操作手册上的指示,选择标零功能。
b. 根据提示,将方向盘旋转到一个已知的标准位置,例如直线行驶时的方向盘中立位置。
c. 完成标零过程后,TIS传感器将记住这个标准位置,并以此作为初始参考点。
5. 完成设置:
a. 根据操作手册上的指示,退出找零模式。
b. 检查EPS系统是否正常工作,确保方向盘转动与车辆的行驶方向相匹配。
需要注意的是,具体的方法和流程可能会根据车辆型号和制造商的不同而有所差异。
汽车助力转向专用角度传感器设计

传感器 与微 系统( T r a n s d u c e r a n d M i c r o s y s t e m T e c h n o l o g i e s )
1 2 1
汽 车助 力ቤተ መጻሕፍቲ ባይዱ转 向专 用 角 度传 感器 设计
潘 峰 ,杨其 华 , 刘钢 海
P A N F e n g , Y A N G Q i — h u a , L I U G a n g - h a i
( C o l l e g e o f Qu a l i t y a n d S a f e t y E n g i n e e r i n g , C h i n a J i l i a n g U n i v e r s i t y , Ha n g z h o u 3 1 0 0 1 8, C h i n a ) Ab s t r a c t :A i m i n g a t t o r q u e s e n s o r i n s m a l l c a r e l e c t i r c p o w e r s t e e i r n g ( E P S ) , r e s e a r c h a n d d e s i g n a r e c a r r i e d o u t
感器 , 如加 速踏板位置传感 器 、 节气 门位 置传感 器 、 车身 高
转 动带动 2个小齿 轮的转动 , 安装示 意图如图 l , 2个小齿
一
本文采 用 T I 公 司 的一 种低 功耗 微控 制器 MS P 4 3 0作
为电动助力转 向( E P S ) 系统控制器 的控制核 心 , 采 用奥地
种传感器 , 它可以实现非 接触测 量 , 因其具有 频响 宽 、 动
海拉EPS角度传感器

Pin#4 Pin#5 Pin#6 PWM-T1 PWM-T2 PWM-T1 PWM-T2 PWM-S
Pin#7 GND2 GND2
Pin#8 GND1 GND1
6
Hella TAS/TOS | Eamonn Ren | T-DC| Hella Shanghai, Jan 19, 2014
T1,T2低电平有效
Hella扭矩转角传感器 系统 测量范围 精度 分辨率 信号输出
温度范围 寿命 EMC
扭矩: 角度: 扭矩:
角度: 扭矩:
转角: 扭矩:
角度:
EPS电子助力转向
±6°(±12 Nm 施加在刚度系数2 Nm/°的扭杆上) ±738°(当前绝对角度) <0.1°
1.0° 0.0029°
0.013° PWM(占空比12.5%~87.5%代表 -6°~6°,低电平有效)
海拉EPS角度传感器
本课件仅供大家学习学习 学习完毕请自觉删除
谢谢 本课件仅供大家学习学习
学习完毕请自觉删除 谢谢
一、TAS/TOS传感器
Rotor 转子
Stator 定子
ASIC 芯片
PCB板
i
Transmitter coil 发送线圈
Receiver coil 接收线圈
非接触式扭矩转角传感器运用交变电磁感应的原理精确测量转子的位置 海拉专利CIPOS技术(contactless inductive position sensors)
扭矩信号PWM_T1, PWM_T2, 2000Hz±300Hz, 低电平有效
7
Hella TAS/TOS | Eamonn Ren | T-DC| Hella Shanghai, Jan 19, 2014
EPS工作原理

EPS工作原理
引言概述:
EPS(Electric Power Steering)是一种现代化的汽车转向系统,它通过电子控制单元(ECU)和电动助力装置(EPAS)来辅助驾驶员转向。
本文将详细介绍EPS 的工作原理,包括传感器信号采集、机电驱动、转向力计算、转向角度反馈和故障诊断等五个大点。
正文内容:
1. 传感器信号采集
1.1 转向角度传感器
1.2 转向助力传感器
1.3 车速传感器
1.4 转向助力控制模块
2. 机电驱动
2.1 机电类型
2.2 机电驱动方式
2.3 机电控制算法
3. 转向力计算
3.1 驾驶员转向意图识别
3.2 转向助力力矩计算
3.3 转向助力力矩输出
4. 转向角度反馈
4.1 转向角度传感器反馈
4.2 转向助力力矩反馈
4.3 转向角度修正
5. 故障诊断
5.1 故障检测与报警
5.2 故障代码诊断
5.3 故障排除与修复
总结:
EPS工作原理包括传感器信号采集、机电驱动、转向力计算、转向角度反馈和故障诊断等五个大点。
传感器信号采集涉及转向角度传感器、转向助力传感器、车速传感器和转向助力控制模块。
机电驱动包括机电类型、机电驱动方式和机电控制算法。
转向力计算涉及驾驶员转向意图识别、转向助力力矩计算和转向助力力矩输出。
转向角度反馈包括转向角度传感器反馈、转向助力力矩反馈和转向角度修正。
故障诊断包括故障检测与报警、故障代码诊断以及故障排除与修复。
通过EPS工作原理的详细介绍,我们可以更好地理解和运用这一现代化的汽车转向系统。
汽车角度传感器结构与原理

汽车角度传感器结构与原理随着科技的发展和汽车行业的进步,汽车角度传感器在汽车领域的应用越来越广泛。
汽车角度传感器可以通过测量车辆的角度和方向来提供关键的驾驶信息,帮助驾驶员更好地控制车辆。
本文将介绍汽车角度传感器的结构和原理。
一、汽车角度传感器的结构汽车角度传感器通常由以下几个部分组成:1. 陀螺仪:陀螺仪是汽车角度传感器的核心部件之一,用于测量车辆的角速度和方向。
陀螺仪通常包含一个转子和一个支撑结构,当车辆旋转时,转子会受到相应的力矩作用,从而产生一个与旋转角速度成正比的电信号。
2. 加速度计:加速度计用于测量车辆的加速度和速度变化。
加速度计通常由一个质量块和一个弹簧组成,当车辆加速或减速时,质量块会受到相应的力作用,从而产生一个与加速度成正比的电信号。
3. 磁力计:磁力计用于测量车辆的磁场方向和强度。
磁力计通常由一个磁场感应器和一个磁场生成器组成,磁场感应器可以感知车辆周围的磁场变化,并将其转换为电信号。
4. 控制电路:控制电路负责接收传感器产生的电信号,并进行处理和分析。
控制电路可以根据传感器的信号来计算车辆的角度和方向,并将结果传递给车辆的控制系统。
二、汽车角度传感器的原理汽车角度传感器的原理基于一些基本物理原理和传感器的工作原理。
1. 陀螺仪原理:陀螺仪利用陀螺效应来测量车辆的角速度和方向。
陀螺效应是指当转子受到力矩作用时,由于其自身的角动量,会产生一个垂直于力矩方向的转子运动。
通过测量转子的运动,可以得到车辆的角速度和方向。
2. 加速度计原理:加速度计利用牛顿第二定律来测量车辆的加速度和速度变化。
根据牛顿第二定律,加速度等于作用在物体上的力除以物体的质量。
通过测量质量块受到的力,可以计算出车辆的加速度和速度变化。
3. 磁力计原理:磁力计利用磁场感应原理来测量车辆的磁场方向和强度。
根据磁场感应原理,当磁场感应器受到磁场的影响时,会产生一个与磁场变化成正比的电信号。
通过测量磁场感应器的电信号,可以得到车辆周围磁场的方向和强度。
《海拉EPS传感器》课件

节能环保
海拉EPS传感器具有高效的能量 回收功能,能够将车辆制动时的 能量转化为助力,降低能耗和排
放。
产品应用
适用于各种类型的车 辆,包括轿车、SUV 、货车等。
适用于各种路况,如 城市道路、高速公路 、越野路等。
适用于各种驾驶模式 ,如常规驾驶、运动 驾驶、节能驾驶等。
CHAPTER
02
打开设备箱
找到传感器应安装的设备箱,打开箱门。
定位安装孔
根据传感器附带的安装指南,定位设备箱上的安 装孔。
固定传感器
使用适当的螺丝将传感器固定在设备箱内,确保传 感器牢固。
连接线路
根据指南,将传感器的线路连接到相应的设备或 控制器上。
测试运行
完成安装后,进行测试运行,确保传感器正常工作。
使用说明
开机自检
。
技术参数
测量范围
指传感器能够测量的参数范围 ,如温度、压力、湿度的测量
范围。
分辨率与精度
传感器的分辨率表示其能够检 测到的最小变化量,精度则表 示其测量结果的准确性。
供电要求
传感器正常工作所需的电源要 求,包括电压、电流等参数。
环境适应性
传感器在不同环境下的适应性 表现,如温度、湿度、压力等 环境因素对传感器性能的影响
市场前景
法规推动
各国政府对汽车安全性能的要求越来越严格,法规的推动将进一步促进EPS传 感器市场的增长。
新技术发展
未来,随着EPS传感器技术的不断发展和创新,将进一步推动市场需求的增长和 产品升级。
CHAPTER
05
海拉EPS传感器的安装与使用
安装步骤
准备工具和材料
确保您拥有安装海拉EPS传感器所需的工具和 材料,如螺丝刀、扳手、垫圈等。
海拉感应式位置传感器技术及其应用

海拉感应式位置传感器技术及其应用在传动系统和底盘系统中实现电控可进一步提高驾驶性能、安全性能、燃油经济性能以及排放水平。
而在汽车可靠性不断提高的同时,作为电控装置的基本组成元件——位置传感器的开发也必须取得突破性的进展,即将传感器设计成为能有效免除灰尘影响的非接触类型。
实际应用表明,非接触式传感器替代电压计式传感器代表着技术进步的发展方向。
因此,外界不断召唤新的非接触式传感器的出现。
当然,最好的结果是在应用非接触式传感器的同时还要能够保留电压计式传感器的优点。
海拉拥有专利技术的感应式位置传感器是一种能够满足上述条件的新型位置传感器,它在一个简单、紧凑的空间条件下能够实现对线位移和角位移的非接触式测量,另外,它对制造精度和周围的环境要求较低,在汽车制造领域内获得了广泛的应用,如节气门传感器、加速踏板传感器和转向传感器等。
一、结构与原理1.结构图1 海拉传感器结构和信号原理感应式位置传感器同其他角传感器一样,也是由定子和转子组成的。
在PCB上的定子由激励线圈、3个感应接受线圈和其他信号处理电子元件组成,转子是一块简单的冲压金属片。
图1所示的是一个海拉的测量范围为60°的传感器结构和信号原理简图,从中可以看出ASIC芯片内的振荡单元及PCB上的激励线圈和3个感应接受线圈,3个感应线圈的角度差值为量程的1/3(即20°)。
2.工作原理图2感应耦合原理感应耦合的原理如图2所示,激励线圈中电流产生的电磁场在转子中产生感应电流。
第一次感应耦合与角位置无关,其作用仅是通过感应耦合将能量传递给转子。
传感器的相关信息是通过转子与接受线圈之间的第二次感应耦合来实现的,这次感应与转子相对于定子的相对位置有关。
在第二次感应中,定子上的电压幅值随相对位置而变化,信号处理单元接受线圈的电压信号,进行整流、放大并成对地将其按比例输出。
这种将输出电压与角度按比例测量的原理在很大程度上不会受到机械公差(如空气间隙的变化、轴线偏心和倾斜)的影响。
海拉EPS传感器

基于 CIPOS® 技术的转向传感器 扭矩角度传感器– 第 2代–
差分角测量原则 简单的机械结构 基于成熟的 CIPOS 技术
转子 1 (安装在输入轴)
转子 2 (安装在输出轴)
扭棒
10
Hella/en/2010-07-18/CIPOS Confidential.The Contents may only be passed on, used or made known with our express permission. All rights reserved.
ISO-视图
基于 CIPOS® 技术的转向传感器 具有多圈功能的扭矩和多圈角度测量
通过齿轮组实现多圈角度测量, 尺寸:
外部尺寸: Ø60mm / R40mm 壳体厚度: <25 mm 包含转子的厚度: 33 mm 电气接口 (增加一路信号): 1x PWM
13
Hella/en/2010-07-18/CIPOS Confidential.The Contents may only be passed on, used or made known with our express permission. All rights reserved.
基于CIPOS®技术的转向传感器 扭矩角度传感器 – 第1代 –
2007年量产
9
Hella/en/2010-07-18/CIPOS Confidential.The Contents may only be passed on, used or made known with our express permission. All rights reserved.
CIPOS®-非接触式感应位置传感器 概述
海拉非接触式位置传感器

海拉非接触式位置传感器
佚名
【期刊名称】《汽车制造业》
【年(卷),期】2009(000)05X
【摘要】海拉开发的电磁感应传感器概念CIPOS(非接触式位置传感器)设计非常简单,其工作原理与温度无关.对机械容差不敏感,同时,这种传感器易于连接.从而在整个应用中实现经济有效的利用。
【总页数】2页(P50-51)
【正文语种】中文
【中图分类】TP212
【相关文献】
1.基于霍尔原理的非接触式位置传感器的研究现状与发展趋势 [J], 李志鹏;赵伊齐;邵宪友;赵杨
2.非接触式位置传感器在汽车引擎中的应用 [J], Roberto Scotti
3.海拉感应式位置传感器技术及其应用 [J], 张全慧;夏
琛;HellaKGHueck;Co.DirkHobein;TheodorDorissen;KlausDuerkopp
4.非接触式双信号节气门位置传感器研究 [J], 刘荣先;秦永法
5.德国海拉公司推出非接触型感应位置传感器 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
EPS系统传感器角度信号静态标定及算法解析

Automobile Parts 2021.05013Analysis of Static Calibration and Algorithm for Sensor AngleSignal in EPSEPS 系统传感器角度信号静态标定及算法解析收稿日期:2021-01-11作者简介:宋昌平(1963 ),男,硕士,教授,研究方向为数控技术㊂E-mail:scp@㊂通信作者:侯训波(1967 ),男,学士,正高级工程师,研究方向为汽车转向技术㊂E-mail:houxunbo@㊂DOI :10.19466/ki.1674-1986.2021.05.003EPS 系统传感器角度信号静态标定及算法解析宋昌平1,侯训波2,刘晓文3,毕名辉4,邵阳4(1.大连职业技术学院,辽宁大连116037;2.大连创新零部件制造公司,辽宁大连116620;3.河北中兴汽车制造有限公司,河北保定071000;4.辽宁曙光汽车集团股份有限公司,辽宁丹东118000)摘要:角度传感器作为EPS 系统核心部件,其原始信号特性曲线的相对角位置关系是不规律的,也无统一基准,无法被ECU 处理和应用,因此必须进行标定㊂针对传感器角度信号开展研究,分析基本工作原理和信号特性,归纳出3个关键信号特征点,满足其中一个特征点时,其信号即为可用的㊂据此,提出4种静态标定方式及算法,详细描述了标定过程及原理,同时给出对应的补偿算法,并比较了4种标定方式及算法的优劣情况,供EPS 系统工程师应用参考㊂关键词:EPS 系统;角度传感器;角度信号;静态标定;补偿算法;游标可信度中图分类号:U463.4Analysis of Static Calibration and Algorithm for Sensor Angle Signal in EPSSONG Changping 1,HOU Xunbo 2,LIU Xiaowen 3,BI Minghui 4,SHAO Yang 4(1.Dalian Vocational Technical College,Dalian Liaoning 116037,China;2.Dalian Innovation Parts Manufacturing Company,Dalian Liaoning 116620,China;3.Hebei Zhongxing Automobile Co.,Ltd.,Baoding Hebei 071000,China;4.Liaoning SG Automotive Group Co.,Ltd.,Dandong Liaoning 118000,China)Abstract :As the core component of EPS system,angle sensor has irregular relative angle position relation of original signal characteristiccurve,and there is no unified benchmark,so it cannot be processed and applied by ECU,so it must be calibrated.The angle signal of thesensor was studied,the basic working principle and signal characteristics were analyzed,and three key signal feature points were summarized.When one of the feature points was met,the signal was available.Based on this,four static calibration patterns and algorithms wereproposed,the calibration process and principle were described in detail,and the corresponding compensation algorithms were also given,and the advantages and disadvantages of the four calibration patterns and algorithms were compared for the reference of EPS system engineers.Keywords :Electric power steering system (EPS );Angle sensor;Angle signal;Static calibration;Compensation algorithm;Vernier reserve0㊀引言现代汽车配装电动助力转向系统(EPS 系统)已非常普及㊂角度传感器作为EPS 系统的核心部件之一,直接影响系统性能,其角度信号对于实现主动回正等功能又是必不可少的[1],甚至高端车辆的线控转向系统采用了双转角传感器[2-3],可见其重要程度㊂此外ESP 等底盘电控系统也需要与EPS 共享角度信号,来完成各自控制功能,从而实现底盘一体化控制[4]㊂目前,EPS 系统传感器较多地采用了非接触式,其输出角度信号也采用了占空比PWM 形式,它具有较强的抗干扰能力,被广泛应用㊂为使角度传感器能准确且可靠地被EPS 系统应用,来测量方向盘转角,需对其角度信号进行标定,该标定是指EPS 系统生产厂家针对传感器本身进行的,也是文中的研究对象㊂它既不同于传感器厂商对其灵敏度㊁线性度㊁迟滞性等参数标定[5],也不同于EPS 系统在整车上的零位角度标定[6]㊂通常传感器角度信号标定分为静态标定和动态标定,其中动态标定能较好地消除系统匹配误差,但标定过程较复杂㊁效率较低,而静态标定是生产厂家通常采用的方法,效率较高,也能满足大部分EPS 系统所应用场合的误差要求㊂鉴于此,本文作者针对Hella 传感器的静态角度信号,开展了相关标定方式及算法的分析和研究,供EPS 系统工程师应用参考㊂1㊀传感器工作原理和角度信号特性文中研究的EPS 系统传感器为Hella 非接触交变电磁感应式的扭矩转角传感器,如图1所示,它除了能输出扭矩主信号T 1和副信号T 2,还能输出与角度相关的2021.05 Automobile Parts014Research & Development主信号P 和副信号S ,均为PWM 占空比形式的信号,这些信号是经过传感器内置IC 计算处理后成为可用的信号,再传输到EPS 系统控制器(ECU ),参与系统工作㊂其中PWM _P y /S y /T 1y /T 2y 是未经标定处理前的角度主信号/角度副信号/扭矩主信号/扭矩副信号,也是传感器的原始信号,在EPS 系统工作时,传感器内置IC 直接采样也是这些原始信号㊂图1㊀传感器工作原理简图上述未标定前的原始信号,是在传感器初始化后即可产生的PWM 信号,其中与角度相关的PWM _P y 信号为40ʎ一个循环,共37个周期,PWM _S y 信号为296ʎ一个循环,共5个周期,综合角度范围为1480ʎ,且PWM _P y 和PWM _S y 信号每个循环的有效PWM 数值范围均为12.5%~87.5%[7]㊂如图2所示的传感器各信号特性,是在EPS 系统中处于自由静态未标定前的状态㊂图2㊀未标定前的原始角度信号特性示意当前静态位置时的PWM _P y 和PWM _S y 信号点定义为静态标定初始点P y 0和S y 0,其信号值为PWM _P y 0和PWM _S y 0,将被IC 采样获得㊂其中S y 0点所在PWM _S y 特性区段的PWM _S y =12.5%㊁50%二个特征点,定义为S y 1(PWM _S y 1=12.5%)㊁S y 2(PWM _S y 2=50%);P y 0点所在PWM _P y 特性区段的PWM _P y =12.5%特征点,定义为P y 1(PWM _P y 1=12.5%);当前静态位置时PWM =12.5%点定义为PS 1;S y 1点所对应PWM _P y 特性区段定义为PA 区段,PA 区段中PWM _P y =12.5%特征点定义为P y 1A (PWM _P y 1A =12.5%),在PA 区段中与S y 1点同角度位置所对应PWM _P y 特征点定义为P y 3A (其值为PWM _P y 3A );S y 2点所对应PWM _P y 特性区段定义为PB 区段,PB 区段中PWM _P y =12.5%㊁50%两个特征点,定义为P y 1B (PWM _P y 1B =12.5%)㊁P y 2B (PWM _P y 2B =50%),在PB 区段中与S y 2点同角度位置所对应PWM _P y 特征点定义为P y 3B (其值为PWM _P y 3B );P y 1点所对应PWM _S y 特性区段定义为SA 区段,在SA 区段中与P y 1点同角度位置所对应PWM _S y 特征点定义为S y 3A(其值为PWM _S y 3A )㊂如图2所示,在任何一段1480ʎ角度范围内,若划分0~1480ʎ角度刻度,则任意角度点均存在唯一PWM _P y 和PWM _S y 信号组合与其对应,即可表示为θ=f (PWM _P y ,PWM _S y ),若超出了1480ʎ范围后则会出现重复信号组合㊂2 角度信号标定上述传感器原始角度信号PWM _P y 和PWM _S y 的组合,尽管可以在1480ʎ角度范围内一一对应角度点,但不同传感器被EPS 系统装配后的PWM _P y 和PWM _S y 特性曲线,其相对角位置关系是随机被固定的,没有统一基准,此时的原始角度信号若直接输出,则是不可用的,也无法被ECU 识别并计算角度,因此需要对装配后的传感器原始角度信号进行标定㊂标定后,由传感器内置IC 建立虚拟的PWM _P 和PWM _S 信号与原始角度信号对应,使其具备统一的特性曲线相对角位置关系,标定后传感器输出信号则为新构建的有统一基准的PWM _P 和PWM _S 信号,是可用的角度信号,其目标特性曲线如图3所示,此时ECU 通过适当的算法就能对角度进行识别了㊂图3㊀标定后输出角度信号的目标特性曲线Automobile Parts 2021.05015式1该标定代号为方式1,其基本原理如图2所示,是将PWM _P y 和PWM _S y 的特性曲线同时向右平移,使P y 1点和S y 1点同时与PS 1点重合,即可由IC 建立如图4所示新的虚拟特性曲线PWM _P 和PWM _S (虚线部分)㊂θpPWM P y 0和_S y 向_P 和(1)(2),,即(3)则PWM _S =PWM _S y 当PWM _S y -ΔPWM _S <12.5%时,则PWM _S =PWM _S y-ΔPWM _S +75%⎩⎨⎪⎪⎪(4)3.2㊀单移P y 至PWM _S y 12.5%重合标定 标定方式4该标定代号为方式4,如图2所示,此标定方式是2021.05 Automobile Parts016Research & Development在PWM _S y 特性曲线位置不变的情况下,仅将PWM _P y 特性曲线向右平移,使P y 1A 点与S y 1点重合,即可由IC 建立如图5所示新的虚拟特性曲线PWM _P (虚线部分)㊂图5㊀单移P y 至PWM _S y 12.5%重合标定特性曲线示意如图5所示,PWM _P y 特性曲线向右平移角度为Δθp 时,可使P y 1A 点与S y 1点重合,在平移过程中会引起P y 3A 点逐渐下移,最后与S y 1点重合,使PWM 下降所产生的差值为ΔPWM _P =PWM _P y 3A -PWM _P y 1A ㊂设Δθps =θs -θp ,其中θp 和θs 的含义和计算方法与式(1)相同;参见图2和图5,Δθps 代表了点S y 1和点P y 1之间的角度差,它具有正负号,由此可计算PA 区段中P y 1A 点距P y 1点的整段倍数K p ,其逻辑算法为:K p =0㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀Δθps <0ʎK p =ROUNDUP (Δθps /40ʎ,0)Δθps ⩾0ʎ{(5)平移角度Δθp 表达式:Δθp =40ʎˑK p +θp -θs(6)对应Δθp 的PWM 差值表达式:ΔPWM _P =75%ˑΔθp /40ʎ(7)新构建PWM _P 信号的补偿算法与式(3)相同,新构建PWM _S 信号的补偿算法为:PWM _S =PWM _S y(8)3.3㊀单移P y 至PWM _S y 50%重合标定 标定方式5该标定代号为方式5,如图2所示,此标定方式是在PWM _S y 特性曲线位置不变的情况下,仅将PWM _P y 特性曲线向右或向左平移,使P y 2B 点与S y 2点重合,即可由IC 建立如图6所示新的虚拟特性曲线PWM _P (虚线部分)㊂如图6所示,PWM _P y 特性曲线向右或向左平移角度为Δθp 时,可使P y 2B 点与S y 2点重合,在平移过程中会引起P y 3B 点逐渐下移或上升,最后与S y 2点重合,使PWM 下降或上升所产生的差值为ΔPWM _P =PWM _P y 3B -PWM _P y 2B ㊂图6㊀单移P y 至PWM _S y 50%重合标定特性曲线示意设θps =θs +θp ,其中θp 的含义和计算方法与式(1)相同;参见图2和图6,θs 代表了S y 0点指向S y 2点的角度值,它具有方向性,也有正负号,其表达式为:θs =296ʎˑ(50%-PWM _S y 0)/75%(9)据此,再参见图2和图6,θps 则代表了P y 1点指向S y 2点的角度值,它具有方向性,也具有正负号(向右为正,向左为负),由此可计算PB 区段中P y 1B 点距P y 1点的整段倍数K p ,K p 同样具有方向性和正负号,其逻辑算法如下:K p =1㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀θps =0ʎK p =TROUNUP (θps /40ʎ,0)θps ʂ0ʎ{(10)平移角度Δθp 表达式:Δθp =θps -(40ʎˑK P +20ʎ)㊀θps <0ʎΔθp =θps -(40ʎˑK P -20ʎ)㊀θps ⩾0ʎ{(11)对应Δθp 的PWM 差值表达式与式(7)相同㊂新构建PWM _S 信号的补偿算法与式(8)相同,新构建PWM _P 信号的补偿算法为:当PWM _P y -ΔPWM _P <12.5%时,则PWM _P =PWM _P y -ΔPWM _P +75%当12.5% PWM _P y -ΔPWM _P 87.5%时,则PWM _P =PWM _P y -ΔPWM _P 当PWM _P y -ΔPWM _P >87.5%时,则PWM _P =PWM _P y-ΔPWM _P -75%⎧⎩⎨⎪⎪⎪⎪⎪⎪⎪⎪(12)3.4㊀单移S y 至PWM _P y 12.5%重合标定 标定方式7该标定代号为方式7,如图2所示,此标定方式是在PWM _P y 特性曲线位置不变的情况下,仅将PWM _S y 特性曲线向右平移,使S y 1点与P y 1点重合,即可由IC 建立如图7所示新的虚拟特性曲线PWM _S (虚线部分)㊂Automobile Parts 2021.05017图7㊀单移S y 至PWM _P y 12.5%重合标定特性曲线示意如图7所示,PWM _S y 特性曲线向右平移角度为Δθs时,可使S y 1点与P y 1点重合,在平移过程中会引起S y 3A 点逐渐下移,最后与P y 1点重合,使PWM 下降所产生的差值为ΔPWM _S =PWM _S y 3A -PWM _S y 1㊂设Δθsp =θp -θs ,其中θp 和θs 的含义和计算方法与式(1)相同;参见图2和图7,Δθsp 代表了点S y 1和点P y 1之间角度差,它具有正负号,由此可计算SA 区段中S y 1点距P y 1点的整段倍数K s ,其逻辑算法为:K s =0㊀㊀㊀Δθsp 0ʎK s =1Δθsp >0ʎ{(13)平移角度Δθs 表达式:Δθs =296ʎˑK s +θs -θp(14)对应Δθs 的PWM 差值表达式:ΔPWM _S =75%ˑΔθs /296ʎ(15)新构建PWM _P 信号的补偿算法为:PWM _P =PWM _P y(16)新构建PWM _S 信号补偿算法与式(4)相同㊂4 典型方式的标定结果按以上4种典型方式实施标定,在同一个静态位置时,设静态初始点采样值均为:PWM _P y 0=40%㊁PWM _S y 0=30%,其标定后仿真特性如图8 图11所示㊂图8㊀标定方式1输出特性结果图9㊀标定方式4输出特性结果图10㊀标定方式5输出特性结果图11㊀标定方式7输出特性结果图8 图11中特性曲线均以静态位置为基准零点,向右展开至1480ʎ为止,还可理解为基准零点与1480ʎ角度点是首尾相连而循环的㊂其中实心点为标定的目标重合点,空心点为随动完成的特征点,所对应数值是以静态位置为基准零点的角度值㊂从图示中很容易看出,标定后角度信号特性曲线明显具有了3个特征点,均可作为基准点,依此传感器输出信号就具备了统一基准,说明4种典型标定方式均是有效的㊂在实践中,标定完成后,还需由外置设备计算标定结果的游标可信度V res (Vernier reserve ),可表达为V res =V (PWM _P ,PWM _S ),以此检验标定效果,其达标要求为V res ȡ90%㊂因PWM _S y 信号是由传感器内置磁性小齿轮激励霍尔芯片生成的,齿轮间的啮合存在间隙,并且其他机械匹配件之间也存在间隙等误差,甚至采样电路也会造成误差,综合PWM _P 偏差为ʃ0.03%㊁PWM _S 偏差为ʃ0.05%,这些误差因素均会对标定结果的游标可信度造成影响,其影响程度如表2所示㊂Analysis of Static Calibration and Algorithm for Sensor AngleSignal in EPSEPS 系统传感器角度信号静态标定及算法解析2021.05 Automobile Parts018中,方式4和5要优于其他方式㊂因环境振动等因素,会引起PWM 波动,也会引起采样点在12.5%和87.5%附近产生切换,该极限情况经仿真验证,仍符合表2所示的V res 变化规律,未出现异常,这说明振动等因素对文中所提出的4种典型标定方式和补偿算法的影响是等同的㊂尔滨:东北林业大学,2015.[2]何磊,马伯祥,宗长富.线控转向汽车转向盘转角传感器的容错控制策略[J].汽车工程,2015,37(3):327-330.HE L,MA B X,ZONG C F.Fault-tolerance control strategy for thesteering wheel angle sensor of a steer-by-wire vehicle[J].Automo-tive Engineering,2015,37(3):327-330.[3]陈俐,李雄,程小宣,等.汽车线控转向系统研究进展综述[J].Automobile Parts 2021.05019高㊁电力消费中煤电比重偏高的 两高 问题突出;同时山东也是人口大省,基础设施齐备,年均260万吨氢气产量,居全国首位㊂氢进万家 工程的目标,便是通过终端需求催动氢能创新链与产业链的融合发展,开辟多元化应用场景,实现碳排放的大幅降低,可加快打造出可复制㊁可推广㊁社会认可度高的当工程启动的那一刻起,如何落地落实便成为当务之急㊂对此,山东省政府有关负责人显得信心十足: 我们将坚定不移地抓好贯彻落实,坚决完成示范工程的各项任务,加快建设高水平创新型省份,为科技强国建设贡献山东智慧和力量㊂(来源‘科技日报“)。
海拉EPS角度传感器PPT优秀课件
T1,T2低电平有效
扭矩信号PWM_T1, PWM_T2, 2000Hz±300Hz, 低电平有效
7
Hella TAS/TOS | Eamonn Ren | T-DC| Hella Shanghai, Jan 19, 2014
通孔式测量
高精度
高精度
机械特性强
机械特性强
通孔式测量
尺寸 小巧
尺寸
生命周期
Hella扭矩转角传感器 系统 测量范围 精度 分辨率 信号输出
温度范围 寿命 EMC
扭矩: 角度: 扭矩:
角度: 扭矩:
转角: 扭矩:
角度:
EPS电子助力转向
±6°(±12 Nm 施加在刚度系数2 Nm/°的扭杆上) ±738°(当前绝对角度) <0.1°
1.0° 0.0029°
0.013° PWM(占空比12.5%~87.5%代表 -6°~6°,低电平有效)
3
Hella TAS/TOS | Eamonn Ren | T-DC| Hella Shanghai, Jan 19, 2014
Imported parts Localization
进口件
parts 国产件
PCB SMT in HSE 上海贴片
SSeennssoor r GGeeaar r
(GMr.a(gincelt.) magnet)传感 器齿轮组
9
Hella TAS/TOS | Eamonn Ren | T-DC| Hella Shanghai, Jan 19, 2014
非常感谢!
PPrreesseenntatatitoinonbybEyaFmraonnnz RZhenou
个人观点供参考,欢迎讨论
2024年角度传感器市场需求分析

2024年角度传感器市场需求分析概述角度传感器是一种用于测量物体的旋转或转动角度的设备。
它广泛应用于汽车、航空航天、机械制造和工业自动化等领域。
本文将对角度传感器市场需求进行分析,包括市场规模、应用领域、主要厂商和发展趋势等方面。
市场规模角度传感器市场一直保持着稳定增长的趋势。
据市场研究公司预测,未来几年内,全球角度传感器市场将继续增长。
这主要源于以下几个方面的原因:1.汽车行业的发展:随着汽车工业的快速发展,对于高精度角度传感器的需求不断增加。
角度传感器在汽车中的应用包括转向控制、刹车系统和电子稳定性控制等,因此对于角度传感器的市场需求逐步扩大。
2.工业自动化的推动:随着工业自动化的普及,对于智能传感器的需求也在增加。
角度传感器作为智能制造的关键组成部分,具有能够实时监测和控制物体运动的能力,因此在工业自动化领域的市场需求不断增长。
3.新兴应用领域的需求:除了汽车和工业领域,角度传感器还在其他新兴应用领域得到广泛应用。
比如,虚拟现实、无人机和机器人等领域都需要角度传感器以实现精准控制和定位。
随着这些新兴应用的不断发展,对于角度传感器的市场需求将进一步提升。
应用领域角度传感器在各个领域都有广泛的应用。
1.汽车行业:角度传感器在汽车中的应用包括转向角度测量、转向轴位置检测、制动踏板角度检测等。
这些应用对于角度传感器的精确性和可靠性有较高要求。
2.航空航天领域:角度传感器在飞机和航天器中的应用包括航向角测量、姿态控制和导航系统等。
角度传感器对于航空航天领域的安全性和稳定性至关重要。
3.机械制造:角度传感器在机械制造中的应用涵盖了很多方面,如机器人的运动控制、加工工件的定位和角度测量等。
角度传感器对于机械制造领域的自动化程度和生产效率起着至关重要的作用。
主要厂商目前,角度传感器市场竞争激烈,主要的厂商包括:1.罗姆半导体:作为市场领导者之一,罗姆半导体提供各种类型的角度传感器,包括磁性角度传感器、光学角度传感器和电容式角度传感器等。
海拉扭矩传感器的标定方法-概述说明以及解释
海拉扭矩传感器的标定方法-概述说明以及解释1.引言1.1 概述在撰写本文之前,我们先来简单了解一下海拉扭矩传感器的概念和作用。
海拉扭矩传感器是一种能够测量和监测物体扭矩或转矩的传感器装置。
它通过感应物体受力或运动产生的扭矩来测量和记录相关数据,从而帮助我们了解物体的运动或工作状态。
海拉扭矩传感器广泛应用于许多领域,包括机械工程、汽车工业、航空航天、能源领域等等。
在这些领域中,海拉扭矩传感器被用于评估和优化机械系统的性能,确保设备的安全运行。
本文将重点介绍海拉扭矩传感器的标定方法。
标定是一种校准和校正传感器的过程,用于确保传感器输出的准确性和可靠性。
海拉扭矩传感器的标定方法涉及到一系列的实验和数据处理技术,旨在消除或纠正传感器输出中的误差和偏差。
通过阅读本文,您将了解到海拉扭矩传感器的原理、应用领域以及标定方法的基本概念和步骤。
我们希望本文能为需要进行海拉扭矩传感器标定的工程师和科研人员提供一些参考和指导,帮助他们更好地应用和使用海拉扭矩传感器。
接下来,我们将详细介绍海拉扭矩传感器的原理和应用领域,以及标定方法的具体步骤和注意事项。
最后,我们将总结文章内容,并展望未来海拉扭矩传感器在技术发展和应用领域的前景。
1.2文章结构文章结构部分的内容可以按照以下方式编写:文章结构部分旨在介绍整篇文章的组织结构和内容安排。
本文分为引言、正文和结论三个部分。
引言部分为文章的开篇,主要包括概述、文章结构和目的三个方面的内容。
首先,我们将简要介绍海拉扭矩传感器及其在工程领域中的应用。
接着,我们将详细说明本文的结构和内容安排,以帮助读者更好地理解整篇文章。
最后,我们将明确本文的目的,即介绍海拉扭矩传感器的标定方法,以提供相关领域研究工作者和实践人员的参考。
正文部分是文章的核心部分,主要包括海拉扭矩传感器的原理、应用领域和标定方法三个方面的内容。
我们将首先深入探讨海拉扭矩传感器的工作原理,介绍其主要组成和工作原理的解析。
海拉EPS角度传感器

Housing 壳体
Spring ring 弹簧
Connector group 接插件
Cover 传感器盖
Rotor_OS 输出轴转子
TAS only
Gear Cover 齿轮盖
Initial Gear 齿轮
Rotor IS Gr. Incl. rotor sleeve Incl. rotor structure 输入轴转子总成
Hella扭矩转角传感器 系统 测量范围 精度 分辨率 信号输出
温度范围 寿命 EMC
扭矩: 角度: 扭矩:
角度: 扭矩:
转角: 扭矩:
角度:
EPS电子助力转向
±6° (±12 Nm 施加在刚度系数2 Nm/°的扭杆上) ±738° (当前绝对角度) <0.1° 1.0° 0.0029°
0.013° PWM(占空比12.5%~87.5%代表 -6°~6°,低电平有效)
PPrreesseenntatatitoinonbybEyaFmraonnnz RZhenou
Technical Exchange Of TAS/TOS
上海海拉电子有限公司 Hella Shanghai Electronics Co., ltd 2015-01-19
一、TAS/TOS传感器
Rotor 转子
3
He精lla品TAS/TOS | Eamonn Ren | T-DC| Hella Shanghai, Jan 19, 2014
Imported parts Localization
进口件
parts 国产件
PCB SMT in HSE 上海贴片
SSeennssoor r GGeeaar r
(GMr.a(gincelt.) magnet)传感 器齿轮组
海拉扭矩转角传感器原理
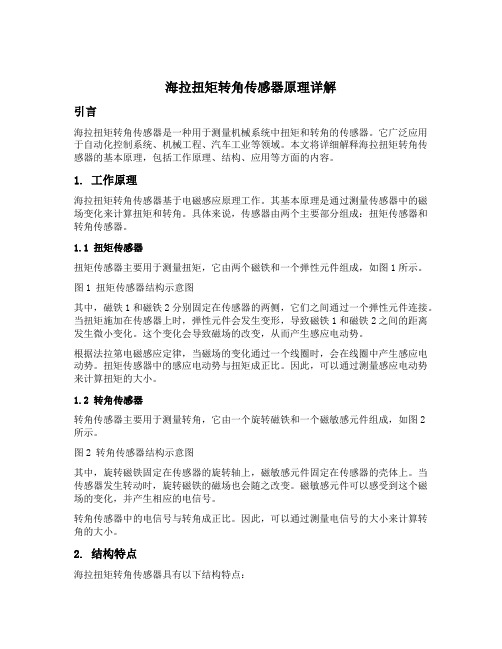
海拉扭矩转角传感器原理详解引言海拉扭矩转角传感器是一种用于测量机械系统中扭矩和转角的传感器。
它广泛应用于自动化控制系统、机械工程、汽车工业等领域。
本文将详细解释海拉扭矩转角传感器的基本原理,包括工作原理、结构、应用等方面的内容。
1. 工作原理海拉扭矩转角传感器基于电磁感应原理工作。
其基本原理是通过测量传感器中的磁场变化来计算扭矩和转角。
具体来说,传感器由两个主要部分组成:扭矩传感器和转角传感器。
1.1 扭矩传感器扭矩传感器主要用于测量扭矩,它由两个磁铁和一个弹性元件组成,如图1所示。
图1 扭矩传感器结构示意图其中,磁铁1和磁铁2分别固定在传感器的两侧,它们之间通过一个弹性元件连接。
当扭矩施加在传感器上时,弹性元件会发生变形,导致磁铁1和磁铁2之间的距离发生微小变化。
这个变化会导致磁场的改变,从而产生感应电动势。
根据法拉第电磁感应定律,当磁场的变化通过一个线圈时,会在线圈中产生感应电动势。
扭矩传感器中的感应电动势与扭矩成正比。
因此,可以通过测量感应电动势来计算扭矩的大小。
1.2 转角传感器转角传感器主要用于测量转角,它由一个旋转磁铁和一个磁敏感元件组成,如图2所示。
图2 转角传感器结构示意图其中,旋转磁铁固定在传感器的旋转轴上,磁敏感元件固定在传感器的壳体上。
当传感器发生转动时,旋转磁铁的磁场也会随之改变。
磁敏感元件可以感受到这个磁场的变化,并产生相应的电信号。
转角传感器中的电信号与转角成正比。
因此,可以通过测量电信号的大小来计算转角的大小。
2. 结构特点海拉扭矩转角传感器具有以下结构特点:2.1 高精度海拉扭矩转角传感器采用先进的传感技术和精密的制造工艺,具有高精度的特点。
其测量误差通常在1%以内,可以满足精密控制系统的要求。
2.2 宽测量范围海拉扭矩转角传感器可以在较宽的扭矩和转角范围内进行测量。
扭矩范围通常从几牛米到几千牛米,转角范围通常从几度到几百度。
2.3 快速响应海拉扭矩转角传感器具有快速响应的特点。
江苏罡阳EPS项目介绍

江苏罡阳 转向系统有限公司
批量供货:苏州益高、江淮叉车、苏州英格索兰、南通明诺扫地车、林海摩托 等主机厂,具有匹配特种车相关经验,以及相关问题的解决.
产品介绍:C-EPS电动管柱
江苏罡阳 转向系统有限公司
适用车型:重庆力帆320 适用车型:五菱荣光,北汽威旺
适用车型:长安商用车
主要客户
江苏罡阳 转向系统有限公司
产品介绍:特种车、观光车、仓储车系列
应用:目前批量使用于春风摩托(输出扭矩90N.M, 扭杆刚度12N.M/度),防水等级IP67
江苏罡阳 转向系统有限公司
此产品适用于方向盘转速相对较低,扭矩输 出相对较高的场合。现为杭州叉车设计的仓 储车GYC35A电动管柱样品已完成,等待送样 通知试装验证。
产品介绍:特种车、观光车、仓储车系列
江苏罡阳 转向系统有限公司
企业使命:制造美好生活 核心价值观:以诚信责任为本,走开放创新之路 企业愿景:建成集科研与制造为一体的国际化汽 摩零部件生产基地
EPS项目介绍
江苏罡阳转向系统有限公司
EPS产品核心电控零件—传感器介绍
江苏罡阳 转向系统有限公司
1.接触式:性价比高,满足一般市场需求; 2.感应式 (非接触式):高寿命 ,高精度, 成本相应增加;
产品 规划:新技术&新工艺
江苏罡阳 转向系统有限公司
• 12齿 • 大扭矩涂覆
• 欧美两向调节 • 欧美系四向调节
• 钢球结构 • 大扭矩
产品介绍:电动循环球产品
江苏罡阳 转向系统有限公司
吉利 商用车:纯电动轻卡系列E200物流车型,输出扭矩1800N.M,整 车减少油路设计,电动泵设计,转向更加轻便灵活(相当于EPS与机械式方 向机的结合体,单扭杆设计)——适合纯电动物流车布置,提供节能环保 解决方案。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
系统框图
芯片内部有156位可编程位(HISW)
4
Hella TAS/TOS | Eamonn Ren | T-DC| Hella Shanghai, Jan 19, 2014
二、传感器性能
PWM
Sensor TOS TAS
Pin#1 VCC1 VCC1
Pin#2 VCC2 VCC2
Pin#3 PWM-P
1
Hella TAS/TOS | Eamonn Ren | T-DC| Hella Shanghai, Jan 19, 2014
2
Hella TAS/TOS | Eamonn Ren | T-DC| Hella Shanghai, Jan 19, 2014
Imported parts 进口件
Localization parts 国产件
Rotor 转子
Stator 定子
ASIC 芯片
PCB板
i Transmitter coil 发送线圈 Receiver coil 接收线圈
非接触式扭矩转角传感器运用交变电磁感应的原理精确测量转子的位置 海拉专利CIPOS技术(contactless inductive position sensors)
Gear Cover 齿轮盖
Initial Gear 齿轮
Rotor IS Gr. Incl. rotor sleeve Incl. rotor structure 输入轴转子总成
PCB-Reflow Gr PCB Electronic components 完成贴片的PCBA
3
Hella TAS/TOS | Eamonn Ren | T-DC| Hella Shanghai, Jan 19, 2014
11
Hella TAS/TOS | Eamonn Ren | T-DC| Hella Shanghai, Jan 19, 2014
非常感谢!
Presentation by Franz Ren Zhou Presentation by Eamonn
Hella扭矩转角传感器 系统 测量范围 精度 分辨率 信号输出 扭矩: 角度: 扭矩: 角度: 扭矩: 转角: 扭矩: 角度: 温度范围 寿命 EMC EPS电子助力转向 ± 6°(± 12 Nm 施加在刚度系数2 Nm/° 的扭杆上) ± 738°(当前绝对角度) <0.1° 1.0° 0.0029° 0.013° PWM(占空比12.5%~87.5%代表 -6° ~6° ,低电平有效) PWM(P信号占空比12.5%~87.5%代表 0° ~40° ,低电平有效; S信号占空比12.5%~87.5%代表 0° ~296° ,高电平有效) -40 …125° C 正常工作寿命:15年;正常工作里程:24万公里;正常工作时间: 9500h。 Hella TAS Gen2_EMC report.pdf
扭矩信号PWM_T1, PWM_T2, 2000Hz±300Hz, 低电平有效
8
Hella TAS/TOS | Eamonn Ren | T-DC| Hella Shanghai, Jan 19, 2014
通孔式测量
一种直接测量纽杆行
高精度
机械特性强
Technical Exchange Of TAS/TOS
上海海拉电子有限公司 Hella Shanghai Electronics Co., ltd 2015-01-19
Presentation by Franz Ren Zhou Presentation by Eamonn
一、TAS/TOS传感器
PCB SMT in HSE 上海贴片
Sensor SensorGear Gear (Magnet) Gr. (incl. magnet)传感 器齿轮组
Housing 壳体
Spring ring 弹簧
Connector group 接插件
Cover 传感器盖
Rotor_OS 输出轴转子
TAS only
机械特性强
采用简单且有成本优势的 press-fit工艺
通孔式测量
尺寸 小巧
尺寸
TOS和TAS同样尺寸与外形,采用模块化 设计,客户不需要开两套模具
生命周期
15年, 或者24万公里,或者9500小时
10
Hella TAS/TOS | Eamonn Ren | T-DC| Hella Shanghai, Jan 19, 2014
Pin#4 PWM-T1 PWM-T1
Pin#5 PWM-T2 PWM-T2
Pin#6 PWM-S
Pin#7 GND2 GND2
Pin#8 GND1 GND1
7
Hella TAS/TOS | Eamonn Ren | T-DC| Hella Shanghai, Jan 19, 2014
T1,T2低电平有效