欠驱动手指分析与结构优化
欠驱动式手指康复训练装置的结构优化设计

欠驱动式手指康复训练装置的结构优化设计郑杨;陈垒;王刚;刘新蓉;董晓彤;王珏【摘要】为了使欠驱动式手指康复训练装置可提供的手指关节活动范围满足训练需求,以某一连杆机构为例,通过分析运动学模型空间状态进行结构优化.首先建立机械机构与手指的简化空间模型,以关键构件及手指关节的旋转角度作为空间向量元素,求得莱一机械尺寸及手指长度下所有可能的空间向量,形成空间状态集;然后通过考察空间状态集选择最佳机构尺寸,使得手指关节活动范围满足训练需求.仿真及样机佩戴测试结果表明,经过优化设计后的连杆式机构能够辅助手指在所需的关节活动范围内进行屈曲伸展运动,对手指长度变化的适应能力较强.所提结构优化方法对于欠驱动式肢体康复训练装置的结构优化设计具有一定的参考价值.【期刊名称】《西安交通大学学报》【年(卷),期】2015(049)003【总页数】6页(P151-156)【关键词】手指康复;欠驱动;结构优化;终端牵拉【作者】郑杨;陈垒;王刚;刘新蓉;董晓彤;王珏【作者单位】西安交通大学生物医学信息工程教育部重点实验室,710049,西安;国家保健器具工程技术研究中心西安交通大学分部,710049,西安;西安交通大学生物医学信息工程教育部重点实验室,710049,西安;国家保健器具工程技术研究中心西安交通大学分部,710049,西安;西安交通大学生物医学信息工程教育部重点实验室,710049,西安;国家保健器具工程技术研究中心西安交通大学分部,710049,西安;西安交通大学生物医学信息工程教育部重点实验室,710049,西安;国家保健器具工程技术研究中心西安交通大学分部,710049,西安;西安交通大学生物医学信息工程教育部重点实验室,710049,西安;国家保健器具工程技术研究中心西安交通大学分部,710049,西安;西安交通大学生物医学信息工程教育部重点实验室,710049,西安;国家保健器具工程技术研究中心西安交通大学分部,710049,西安【正文语种】中文【中图分类】R318.04康复训练机器人可以辅助患者进行肢体关节活动,其优点是可以保证稳定的训练效率和强度,能够提供与训练效果相关的客观评价参数[1]。
三关节连杆欠驱动手爪参数优化

Machinery Design &Manufacture机械设计与制造第4期2020年4月三关节连杆欠驱动手爪参数优化王福华1,2,刘玉旺1(1.中国科学院沈阳自动化研究所,辽宁沈阳110016;2.中国科学院大学,北京100049)来稿日期:2019-09-06基金项目:国家自然科学基金(51605474);辽宁省自然科学基金(20121060);机器人学国家重点实验室开放课题资助项目(2016-Z09)作者简介:王福华,(1991-),男,山东烟台人,硕士研究生,主要研究方向:攀爬机器人动力学及运动学;刘玉旺,(1982-),男,河南濮阳人,博士研究生,研究员,主要研究方向:欠驱动及运动耦合机构学1引言欠驱动机构是近代研究发现的一种新型机构,因其驱动元件数小于机构的自由度而得名。
欠驱动机械手作为欠驱动机构的衍生物,其不仅驱动元件少,且能够自适应抓取不同形状和尺寸的物体。
同时与传统的灵巧手相比较,其生产加工制造成本便宜,结构轻巧,控制简单[1-3]。
目前国内外研究学者对于欠驱动机械手的理论研究和实践探索都取得重大的成果。
对于连杆欠驱动手爪影响其抓取稳定性的主要因素是连杆结构设计参数。
因此在连杆欠驱动手爪的设计阶段,合理地选择设计参数是至关重要的[4-5]。
然而,考虑到拓扑优化许多设计参数,例如关节的数量,关节的长度,作用在关节旋转点的扭矩以及在接触点出的接触力等。
不能直接简单地用传统的方法来分析设计各个连杆关节的参数[6]。
目前大多数研究的文献和成果不能直接应用推广到设计阶段[7-8]。
一方面由于设计优化重点在于驱动参数是基于制造和拟人化方面的考虑。
另一方面,其理论研究大部分是关于两个关节的简单欠驱动手爪。
此外,大多参数设计研究仅限于特定的欠驱动手爪的驱动机构[9-10]。
针对三个关节的欠驱动手爪,采用等接触力方法,以传动角和传动比作为参数优化设计的约束条件,确定欠驱动连杆几何设计参数。
欠驱动灵巧手的优化设计及仿真分析

欠驱动灵巧手的优化设计及仿真分析
张林;王兴东;孙伟;龚彩云
【期刊名称】《武汉科技大学学报》
【年(卷),期】2024(47)1
【摘要】传统欠驱动机械手的运动空间相对固定、操作功能单一,对抓取物没有较强的自适应性,为此设计一种新的连杆式欠驱动灵巧手机构,并进行设计优化和仿真抓取实验。
阐述了该灵巧手的整体机构设计及工作原理,其可实现包络和指尖两种抓取模式。
根据手指的几何尺寸采用协同耦合方式设计手掌尺寸,利用可变手掌协同手指抓取,提高了灵巧手在抓取形状复杂和不同尺寸物体时的自适应性。
基于虚功原理建立灵巧手单指各关节的接触力模型,针对抓取过程中存在的抓取力不足及抓取不稳等问题,使用NSGA-II优化算法对单指机构的杆长进行尺度综合。
利用建立的虚拟样机进行仿真抓取实验,结果表明,该灵巧手具有较强的自适应性,能够稳定抓取多种形状和尺寸的物体。
【总页数】8页(P47-54)
【作者】张林;王兴东;孙伟;龚彩云
【作者单位】武汉科技大学冶金装备及其控制教育部重点实验室
【正文语种】中文
【中图分类】TH112
【相关文献】
1.欠驱动手爪设计及接触力分析与仿真
2.两关节绳驱式欠驱动手爪设计与仿真分析
3.欠驱动多指机械手优化设计与抓取稳定性分析
4.丫形欠驱动库尔勒香梨采摘机械手的设计与仿真分析
5.一种新型欠驱动机械手爪的抓取分析和优化设计
因版权原因,仅展示原文概要,查看原文内容请购买。
全转动关节欠驱动手指机构及其运动学分析

欠驱动手指原理
欠驱动手指原理哎呀,说起来欠驱动手指原理,这事儿可真不是一两句能说清楚的。
你瞧,这玩意儿就像是你手里拿着一把螺丝刀,但只有一把,却要拧紧好几个不同型号的螺丝。
这听起来是不是挺头疼的?但这就是欠驱动系统的魅力所在,简单又高效。
记得有一次,我在朋友家帮忙修理一个老式的收音机。
那玩意儿真是老古董了,按钮都磨得快看不清了。
我拿着螺丝刀,心想这得是个大工程。
结果呢,我发现这收音机的后盖,只需要拧开三个螺丝就能打开。
我当时就乐了,这不就是欠驱动手指原理的活生生例子嘛!我跟你说,这三个螺丝就像是欠驱动系统的精髓,用最少的“驱动”达到最大的“效果”。
我小心翼翼地拧开每一个螺丝,每一个都像是解开一个谜题。
第一个螺丝,紧得很,我得使劲儿转,感觉像是在和时间较劲;第二个螺丝,松松垮垮,轻轻一拧就下来了,让我有点措手不及;最后一个,卡在中间,不紧不松,就像是生活中的那些小挑战,需要恰到好处的努力。
打开收音机后盖的那一刻,我仿佛打开了新世界的大门。
里面那些复杂的线路和零件,就像是精密的宇宙,每个部件都在自己的位置上发挥着作用。
我一边修理,一边想象着这些零件是如何协同工作的,这种感觉真是太神奇了。
修理过程中,我发现了一个松动的电线,这就是收音机发出噪音的原因。
我小心翼翼地把它固定好,就像是在给一个老朋友治病。
当我把所有的螺丝都拧回去,收音机重新发出清晰的声音时,那种成就感,真是难以言表。
你看,欠驱动手指原理不仅仅是一个技术概念,它其实就在我们的日常生活中。
就像我用一把螺丝刀,解决了一个看似复杂的问题。
这不仅仅是关于效率,更是一种生活的智慧,用最少的资源,达到最好的效果。
所以,下次当你遇到问题,不妨想想欠驱动手指原理,也许答案就在那“最少的驱动”之中。
就像我修收音机一样,有时候,简单的事情,也能带来大大的快乐。
欠驱动手指分析与结构优化
(2.3)
式中:ϕ2n−1 是固定值;θn 是输入;只有θn+1 和ϕ2n 是未知的,由上面的两个方程可以解
28
第二章 欠驱动手指分析与结构优化
出两个未知数。
将关系式(2.3)对时间取导数,这时ϕ2n−1 对时间取导后为 0,θn 杆为输入,角速
度为整理后:
⎡−an sinθn+1
⎢ ⎣
an
cosθn+1
ϕ2n
G1 O1
l1 ϕ1 b1
ac
ω1 c1
θ1
Fcϕ12
y
lϕ
Fs
图 2.5 欠驱动手指运动单元矢量封闭形
下面对手指关节和物体接触的过程进行运动学分析。为了简便计算,以推杆 l 为 x 坐标轴,垂直于推杆 l 为 y 坐标轴,建立如图 2.5 所示的坐标系,对于四边形
{an , bn , ln , cn} 构成的矢量封闭形,可以得到以下的关系式:
欠驱动手指机构是由可变构形的四边形机构和最后一个刚性三角形结构组成的。
欠驱动手爪的基本的结构和受力单元模型,如图 2.2 所示。
Fn dn
Fn−1
lnϕ+12n+1yn+1cn+1 ϕ2n+2 an θn+1 bn+1
ln yn cn
ϕ2n−1 bn
ϕ2n
an−1 θn
ln−1
cn−1
图 2.2 欠驱动手爪的结构和受力单元模型
θ1 = A−1B = v sin ϕ a sin(θ1 − ϕ )
(2.12)
θ n+1 = En E1v sin ϕ a sin(θ1 − ϕ )
(2.13)
同样,按照相同的步骤,可以推导出ϕ2n 。
基于反推式绳轮机构的欠驱动三指节机械手结构设计与静力分析

2023年第47卷第12期Journal of Mechanical Transmission基于反推式绳轮机构的欠驱动三指节机械手结构设计与静力分析朴金生1,2张建川1,2潘伟1,2葛云峰3路长厚1,2(1 山东大学机械工程学院,山东济南250061)(2 山东大学高效洁净机械制造教育部重点实验室,山东济南250061)(3 山东特联信息科技有限公司,山东济南250101)摘要基于连杆式和绳轮式欠驱动机构的特点,提出了一种反推式绳轮新机构。
介绍了反推式绳轮机构的结构原理及运动特性,完成了用于物料袋抓取的新机构三指节机械手的结构设计。
首先,基于平面力系平衡方法对三指节机械手进行静力学分析,采用Adams软件静力学仿真初步验证了静力学分析的准确性,并与连杆式及传统绳轮式结构进行对比仿真,验证了新机构力转换率高的特性;然后,对三指节机械手进行了简化建模、运动学包络抓取仿真和静力学抓取接触力仿真。
结果表明,三指节机械手具备移动式包络抓取的能力;但当前设计存在接触力分布不均的缺点,需要进一步优化。
关键词欠驱动机构绳驱静力学分析运动学仿真静力学仿真Structure Design and Static Analysis of the Underactuated Three-knuckleManipulator with a Reverse Rope-pulley MechanismPiao Jinsheng1,2Zhang Jianchuan1,2Pan Wei1,2Ge Yunfeng3Lu Changhou1,2(1 School of Mechanical Engineering, Shandong University, Jinan 250061, China)(2 Key Laboratory of High-efficiency and Clean Mechanical Manufacture, Ministry of Education, Shandong University, Jinan 250061, China)(3 Shandong Telian Information Technology Co., Ltd., Jinan 250101, China)Abstract Based on the characteristics of the link structure and the rope pulley structure, a new reverse rope-pulley mechanism is proposed. The principle and motion characteristics of the new mechanism are intro⁃duced, and the structure of a three-knuckle manipulator with new mechanism for bag grabbing is designed. Firstly, the static analysis of the three-knuckle manipulator is carried out based on the method of equilibrium of plane forces. The accuracy of the static analysis is verified by Adams statics simulation, and the characteristic of higher force conversion rate is verified by the comparison and simulation with the link structure and rope pulley structure. Secondly, simplified modeling, kinematic envelope grasping simulation and static grasping contact force simulation are carried out for the three-knuckle manipulator. The mobile envelope grasping ability of the three-knuckle manipulator is shown by the simulation results. However, the disadvantage of uneven contact force distribution needs to be optimized for the current design.Key words Underactuated mechanism Cable-driven Static analysis Kinematic simulation Static simulation0 引言机械手作为机器人的末端执行器,其重要性不言而喻。
欠驱动四指灵巧手的设计与研究

动. S AR AH 手 [ 8 ] 、 B e l g r a d e / US C 手 等 为 应 用 连杆 机 构 的典 型 代 表. 连 杆机 构 的 优 点是 能
实现 强力 抓取 物体 , 但在 拟人 性上 略有 不足 , 受
机 械机 构 的 限 制 , 手指 小 型 化 和拟 人 化 实现 较
本 文提 出的新 型欠 驱动手 指 的设计 方 案如
驱 动多指 手 的传动 形 式主要 有连 杆传 动和腱 传
收稿 日期 : 2 0 1 3 - 0 5 — 1 5 第一作者简介 : 何广平 , 教授. 研究 方 向 : 机 器 人 技 术
第 3期
图 1所 示 .
何 广平
刘 菲 : 欠驱 动 四指灵 巧手 的设计 与研 究
于科 学实验 .
构 简单 、 重量轻 、 控制 简单 、 成本低 廉 的仿 人单 腱
式 弹性欠驱 动多 指手 . 并且 , 此 欠驱 动 多 指手 具
有 被动柔顺 特性 , 即在 抓取 物 体 时 , 具 有 自动 适
应 不 同形状物体 的能力. 这一 特性使得 欠驱 动多 指 手具有强 大的包络抓取 能力.
一
正 是基于上述设计 原则 , 在仿 人多指灵 巧手 的结
构 和运动机理 中应 用欠驱动原 理 , 设计 了一种 结
步, 如 S h a d o w D e x t e r o u s Ha n d [ 5 ] . 虽 然 全驱
动灵 巧 手在 拟 人 和灵 活 性 上具 有 很 大优 势 , 但 是 它 的缺点 也是 显 而易见 的 , 如驱 动单元 多 、 重 量大 、 成本 高 , 难 以实 现 工 程 应用体的能力.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
欠驱动手指机构是由可变构形的四边形机构和最后一个刚性三角形结构组成的。
欠驱动手爪的基本的结构和受力单元模型,如图 2.2 所示。
Fn dn
Fn−1
lnϕ+12n+1yn+1cn+1 ϕ2n+2 an θn+1 bn+1
ln yn cn
ϕ2n−1 bn
ϕ2n
an−1 θn
ln−1
cn−1
图 2.2 欠驱动手爪的结构和受力单元模型
(2.3)
式中:ϕ2n−1 是固定值;θn 是输入;只有θn+1 和ϕ2n 是未知的,由上面的两个方程可以解
28
第二章 欠驱动手指分析与结构优化
出两个未知数。
将关系式(2.3)对时间取导数,这时ϕ2n−1 对时间取导后为 0,θn 杆为输入,角速
度为整理后:
⎡−an sinθn+1
⎢ ⎣
an
cosθn+1
对于关节 Gi 和物体靠近的过程,此时从关节 G1到关节 Gi−1都已经和物体接触,
因此,关节 Gi 一直到末关节 Gn 可以看成是一个刚体,关节 Gi 是一个刚体转动的过程,
运动学计算较为简单,略去。
GFnnO+1n+1lnlϕ+n12nca+nn1+ω1θnn++11
ϕn+1 cn
x GnOG−1nnln−ϕ1 2ann−−11cθnn−b1nωn
ln + an − bn − cn =0
(2.2)
1. 速度分析
对于关节 Gn 矢量关系式(2.2)又可以写成两个分量的形式:
⎧⎨⎩llnn
cosϕ2n−1 + an sinϕ2n−1 + an
cosθn+1 − bn cosθn − cn cosϕ2n = 0 sinθn+1 − bn sinθn − cn sinϕ2n = 0
度分析关系式为:
⎡−asinθ1
⎢ ⎣
acosθ1
csinϕ −ccosϕ
⎤ ⎥ ⎦
⎢⎡⎣θϕ1
⎥⎤⎦=⎡⎢⎣
0 −l
⎤⎥⎦= ⎡⎢⎣
0 −v
⎤ ⎥⎦
令
A
=
⎡−a sinθ1
⎢ ⎣
a
cosθ1
c sin ϕ −c cosϕ
⎤ ⎥ ⎦
,
X
=
⎡⎢⎣θϕ1
⎤ ⎥ ⎦
,
B
=
⎡0⎤ ⎢⎣−v⎥⎦
,得到:
(2.11)
θ1 = A−1B = v sin ϕ a sin(θ1 − ϕ )
(2.12)
θ n+1 = En E1v sin ϕ a sin(θ1 − ϕ )
(2.13)
同样,按照相同的步骤,可以推导出ϕ2n 。
2. 加速度分析 将公式(2.4)再对时间取一次导数,即得到手指机构的加速度分析关系式为:
⎡−an sinθn+1 ⎣⎢ an cosθn+1
接触以后,会受到抓持力 Fn 的作用, Fn 对四边形有个瞬时的约束作用,此时通过两
个传递杆 cn 的作用力 yn+1 ,使得动力向下一个杆件传递。欠驱动的模型是复杂的,这
种复杂性表现在:抓取闭合后,每个手指和物体可能会脱离,因此,每个四边形指面
的作用力是否存在,在什么情况下存在是未知的。四边形模型是后面运动和静力学解
欠驱动手指的四边形机构是构成欠驱动手指的基础,有一个四边形机构的是两关 节的欠驱动手指,有两个四边形机构的是三关节欠驱动手指。设想如果将多个这样的 四边形机构单元叠加在一起,就组成如图 2.4 所示的抓持机构。这种机构最大的优点 形状自适应能力强,柔顺性好,抓取物体时就像蛇一样缠绕在物体上,目前更多关节 (超过 3 个)的欠驱动机构并未应用到实际中,有待于进一步研究它的特性,加以开 发和利用。
同样,对于关节 Gn
−
1,
X n−1
=
⎡⎢⎢⎣ϕ2θ(nn−1)
⎤ ⎥ ⎥⎦
我们有:
θ n = θ E n−1 n−1
以此类推:
(2.6) (2.7)
θ n+1 = En E1θ1
(2.8)
对于三角形推杆部分,如图 2.6 所示,在向物体的运动过程中,根据四边形机构
所构成的矢量封闭形,可以写出以下的矢量关系表达式:
⎤ ⎥ ⎦
⎡⎢⎣θϕn2+n1
⎤ ⎥ ⎦
(2.14)
令:
An
=
⎡−an sinθn+1
⎢ ⎣
an
cosθn+1
cn sinϕ2n −cn cosϕ2n
⎤ ⎥ ⎦
,
Cn
=
⎡⎢⎣−−θθnn++11aann
cosθn+1 sinθn+1
ϕ2ncn ϕ2ncn
cosϕn sin ϕn
⎤ ⎥ ⎦
,
Xn
=
⎡⎢⎣θθn2+n1
仔细分析图 2.1 的抓取过程,可以得到多关节欠驱动手指抓取物体的闭合过程
中,从手指根部的第一个关节 G1一直到末关节 Gn 算起,对于每一个手指的关节 Gi 来
说,运动学运动过程基本上可以分为两个过程:
27
第二章 欠驱动手指分析与结构优化
1.关节 Gi 和物体靠近的过程
2.关节 Gi 和物体接触的过程
cn sinϕ2n −cn cosϕ2n
⎤ ⎦⎥
⎡⎢⎣θϕn2+n1
⎤ ⎥ ⎦
+
⎡⎢⎣−−θθnn++11aann
cosθn+1 sinθn+1
=θn
⎡ −bnsinθn ⎢#43;
θn
2
⎡−bncosθn
⎢ ⎣
−bnsinθ
n
⎤ ⎥ ⎦
ϕ2ncn ϕ2ncn
cosϕ2n sinϕ2n
邻关节的四边形是公用的),第一个关节多出 1 个连杆,再加上推杆部分 2 个连杆,
总共的连杆数是 3(n −1) + 3(这里三角形看成是刚性结构,计算为一个连杆),每个
关节的三个连杆有 4 个低副, PL = 4(n − 1) ,加上推杆部分 4 个低副,低副的总数 4(n − 1) + 4 。那么,手指的自由度为:
dof = 3m − 2PL − PH = 3(3(n − 1) + 3) − 2 × (4(n − 1) + 4)
= 9n − 8n
=n
(2.1)
式中: m 为活动构件数, PL 为低副数量, PH 为高副的数量,这里没有高副,所以 PH = 0 ,这里三角形看成是刚性结构。
Fs
图 2.3 三关节欠驱动手指机构自由度
(2.16)
30
式中: g(θn , X n ) = θn2BnT − Cn X n 。
第二章 欠驱动手指分析与结构优化
Xn
=
A −1n Bnθ n
+
A
−1 n
g
(θ
n
,
X
n
)
同样,令:
A−1n Bn
=
⎡ En
⎢ ⎣
Fn
⎤ ⎥ ⎦
,
A−1n g(θn ,
Xn)
=
⎡Mn
⎢ ⎣
N
n
⎤ ⎥ ⎦
,得到:
θ n+1 = Enθ n + M n
2.2 欠驱动手指基本模型
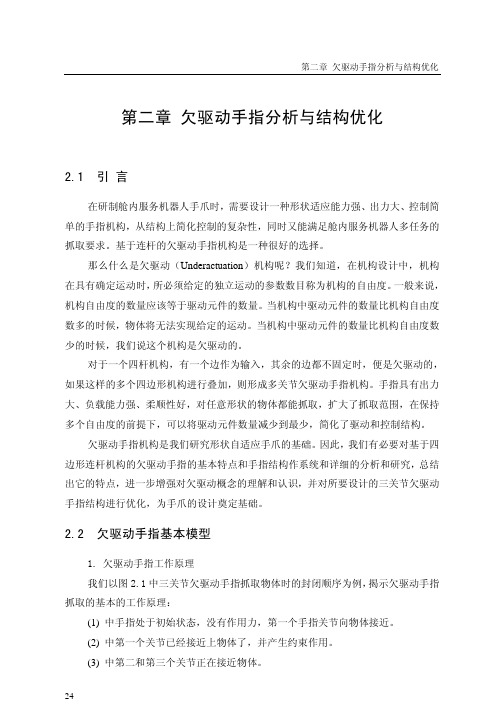
1. 欠驱动手指工作原理 我们以图 2.1 中三关节欠驱动手指抓取物体时的封闭顺序为例,揭示欠驱动手指 抓取的基本的工作原理: (1) 中手指处于初始状态,没有作用力,第一个手指关节向物体接近。 (2) 中第一个关节已经接近上物体了,并产生约束作用。 (3) 中第二和第三个关节正在接近物体。
l+a−c =0
(2.9)
c1 Fc1
O1 b1
ϕ2
a c θ1 lϕ
Fs
图 2.6 三角形推杆矢量封闭形
29
第二章 欠驱动手指分析与结构优化
而此矢量表达式又可以写成两个分量的形式,得到两个非线性方程组:
⎧⎨⎩la+coassθi1n−θ1c−cocssϕin=ϕ0=0
(2.10)
由上面的两个方程可以解出未知数ϕ 和θ1 。 将公式(2.10)对时间取一次导数,令推杆的速度为: v = dl ,得到四边形机构速 dt
⎢ ⎣
bncosθ
n
⎤ ⎥ ⎦
:
(2.4)
An X n = θnBn
Xn
=
A −1nθ n Bn
=
A
−1 n
Bnθ
n
因为
A−1n Bn 为
2×1
矩阵,令:
A−1n Bn
=
⎡En ⎤
⎢ ⎣
Fn
⎥ ⎦
,
⎡⎢⎣θϕn2+n1
⎤ ⎥ ⎦
=
⎡ En
⎢ ⎣
Fn
⎤ ⎥
θ
n
,
⎦
所以得到:
(2.5)
θ n+1 = E nθ n
第二章 欠驱动手指分析与结构优化
第二章 欠驱动手指分析与结构优化
2.1 引 言
在研制舱内服务机器人手爪时,需要设计一种形状适应能力强、出力大、控制简 单的手指机构,从结构上简化控制的复杂性,同时又能满足舱内服务机器人多任务的 抓取要求。基于连杆的欠驱动手指机构是一种很好的选择。
那么什么是欠驱动(Underactuation)机构呢?我们知道,在机构设计中,机构 在具有确定运动时,所必须给定的独立运动的参数数目称为机构的自由度。一般来说, 机构自由度的数量应该等于驱动元件的数量。当机构中驱动元件的数量比机构自由度 数多的时候,物体将无法实现给定的运动。当机构中驱动元件的数量比机构自由度数 少的时候,我们说这个机构是欠驱动的。