翻转犁翻转机构的运动与受力分析
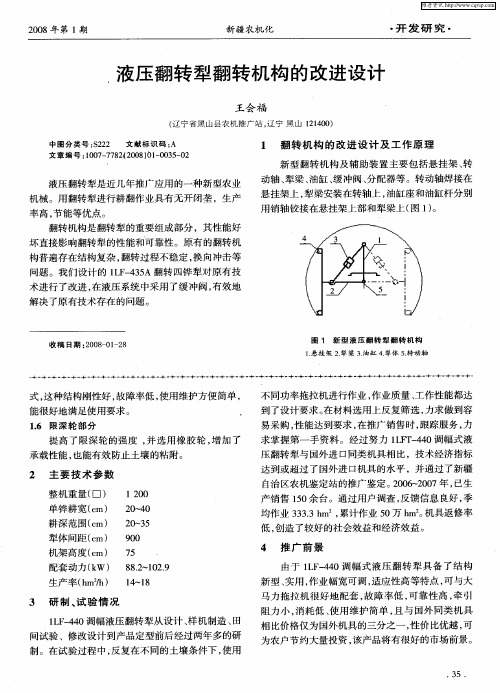
液压翻转犁翻转机构的改进设计
术进 行 了改进 , 液压 系统 中采 用 了缓 冲 阀 , 在 有效 地 解决 了原 有技 术存 在 的 问题 。
收稿 日期 : 0 8 0 — 8 2 0 — 12
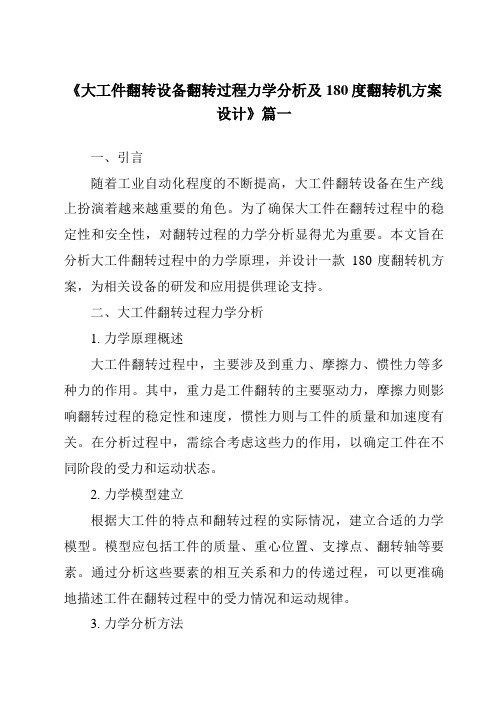
图 1 新 型 液 压 翻 转 犁 翻 转 机 构
1悬挂 架 2犁 梁 3油缸 4犁体 5转 动 轴 . . . .
-
+ -+
-+
-+
-+
-+- +Fra bibliotek一+-
+
- +
-+
-+
- +
- +
-+
-+
- +
・
式, 这种 结构 刚性 好 , 障率低 , 故 使用 维 护方便 简 单 , 能很 好地 满 足使 用要求 。
1 限深轮 部分 . 6
与原有 技 术 的翻转机 构相 比较 ,新 的翻 转机构 具有 明显 的优 点 。 一 , 第 原有 技术 中犁梁 向下 翻转 时
受油缸 的推力作 用 , 加之 犁梁 的 自身重量 , 使得 犁梁 的旋 转速 度很 大 , 加 了对犁 梁 的冲击 , 增 容易 引起有 关 零 部件 的损坏 ,对拖拉 机 的悬挂 机构也 产生 一定 的影 响 。而新 的翻转 机构 由液压 缓 冲 阀控 制犁 梁 的 翻转速 度 。 存在 对犁 架 的冲击 问题 。 二 , 翻转 不 第 原
为农 户节 约大 量投 资 , 产 品将 有很好 的市 场 前景 。 该
维普资讯
・
开 发研 究 ・
新疆农机化 2 新 型 翻 转 机 构 的优 点
20 年第 1 08 期
犁 处 于工作 状态 时 ,油缸杆 处 于最大 的伸 长状 态 。翻转换 向时 , 操纵 分配 器使 油缸杆 缩短 , 油缸杆 、 带动犁 梁连 同犁 体一起 向上翻转 。当犁梁 旋转 到接 近垂 直 位 置 时 , 再操 纵 分 配器 , 其 处 于 “ 动 ” 使 浮 状 态 。这 时油 缸处 于 “ 荷 ” 卸 状态 , 缸失 去 了对 犁梁 油
《大工件翻转设备翻转过程力学分析及180度翻转机方案设计》范文
《大工件翻转设备翻转过程力学分析及180度翻转机方案设计》篇一一、引言在工业生产过程中,大工件的翻转是一项常见的操作。
为了确保翻转过程的稳定性和安全性,需要深入研究翻转过程中的力学原理,并设计出高效、可靠的翻转设备。
本文将针对大工件翻转设备的翻转过程进行力学分析,并在此基础上提出180度翻转机的方案设计。
二、大工件翻转过程力学分析大工件翻转过程中的力学分析主要涉及重力、摩擦力、惯性力等力的作用。
在翻转过程中,这些力相互作用,影响着工件的稳定性和安全性。
1. 重力分析重力是大工件翻转过程中最主要的外力。
在翻转过程中,重力使工件产生向下的加速度,需要设备提供足够的力来克服这一加速度,以保证工件的稳定翻转。
2. 摩擦力分析摩擦力是影响大工件翻转的重要因素。
在翻转过程中,工件与设备之间的摩擦力以及工件与支撑面之间的摩擦力都会影响翻转的顺利进行。
因此,需要合理设计设备与工件之间的摩擦系数,以保证翻转过程的稳定性和安全性。
3. 惯性力分析惯性力是工件在翻转过程中保持原有运动状态的力量。
在翻转过程中,需要克服工件的惯性力,以实现工件的顺利翻转。
因此,需要合理设计设备的动力系统和控制系统,以克服工件的惯性力。
三、180度翻转机方案设计基于大工件翻转过程的力学分析,本文提出以下180度翻转机方案设计:1. 设备结构设计翻转机主要由底座、支撑装置、动力系统、控制系统等部分组成。
底座用于支撑整个设备,保证设备的稳定性;支撑装置用于支撑工件,保证工件的稳定翻转;动力系统提供翻转过程中所需的力;控制系统负责控制设备的运行和停止。
2. 动力系统设计动力系统是翻转机的核心部分,需要提供足够的力来克服重力、摩擦力和惯性力等力的作用。
因此,动力系统应采用高效、可靠的电机和传动装置,以保证设备的正常运行和翻转过程的稳定性。
3. 控制系统设计控制系统负责控制设备的运行和停止,以及实现精确的180度翻转。
控制系统应采用先进的控制算法和传感器技术,以实现精确的控制和监测。
435翻转犁参数-概述说明以及解释
435翻转犁参数-概述说明以及解释1.引言1.1 概述概述部分是对整篇文章的一个概括性介绍,旨在让读者了解文章的主题和内容。
以下是可能的概述部分内容:引言部分为读者提供了关于翻转犁参数的一个概述。
翻转犁作为一种传统农业工具,在农业生产中起到了非常重要的作用。
然而,随着农业生产的发展和技术的进步,翻转犁的参数也变得越来越重要。
本文旨在深入探讨翻转犁参数的相关问题,包括参数的定义、影响参数的因素以及参数对翻转犁性能的影响等。
通过对翻转犁参数的系统研究和分析,可以进一步优化翻转犁的设计和使用,提高农业生产的效率和产量。
本文将分为三个主要部分进行介绍。
首先,在第二部分中,我们将介绍翻转犁的定义和原理,并分析其工作原理和结构特点。
其次,在第二部分中,我们将详细讨论翻转犁的参数一,包括参数的具体含义、测量方法以及参数与翻转犁性能之间的关系。
最后,在第三部分中,我们将对翻转犁参数的重要性进行讨论,并展望未来对该领域的研究方向。
通过对翻转犁参数的深入研究,我们可以更好地了解和应用翻转犁,提高农业生产的效率和产量。
同时,本文的研究也将为相关领域的研究提供指导和参考,促进该领域的发展和进步。
1.2 文章结构文章结构部分主要介绍了本文的整体组织和内容安排。
本文主要分为引言、正文和结论三个部分。
引言部分分为三个小节,分别是概述、文章结构和目的。
在概述部分,简要介绍了翻转犁的背景和应用领域。
在文章结构部分,详细描述了本文的整体组织和各个部分的内容。
在目的部分,明确了撰写本文的目的,即探讨翻转犁参数的相关问题。
正文部分主要包括三个小节,分别是翻转犁的定义和原理、翻转犁的参数一和翻转犁的参数二。
在翻转犁的定义和原理部分,介绍了翻转犁的基本概念和工作原理,辅以适当的图表和实例进行说明。
在翻转犁的参数一部分,详细讨论了与翻转犁相关的第一个参数,并提供了相关研究结果和数据。
在翻转犁的参数二部分,进一步探讨了与翻转犁相关的第二个参数,同样提供了实验数据和讨论。
液压翻转犁的设计与仿真分析
液压翻转犁的设计与仿真分析刘红岩; 徐立伟【期刊名称】《《大庆师范学院学报》》【年(卷),期】2019(039)006【总页数】7页(P50-56)【关键词】液压翻转犁; 悬挂结构; 有限元分析【作者】刘红岩; 徐立伟【作者单位】长春理工大学机电工程学院吉林长春130022【正文语种】中文【中图分类】S2220 引言受雨水、阳光照射等因素影响,土地耕作层上部土壤的团粒结构和腐殖质常会遭到破坏,造成土壤板结、肥力降低,从而导致粮食减产。
[1]随着机械设备在自动化与集成化方向的不断发展,传统的耕作方式已不能满足当前社会的需求,耕作设备机械化必将成为未来发展的方向。
[2]在现代整地机械研发方向中,翻转犁占据了重要地位。
1905年,德国雷肯公司,研发出一种新型犁具,在犁耕过程中,与石头等障碍物相接触时,犁柱会自动翘起,从而保护犁柱不被拉断。
[3]2019年,李晓斌通过Ansys软件对1LF-335型液压翻转犁悬挂架进行静力学分析,得出悬挂架应力主要集中在横梁U型板上的螺栓与法兰相交处,应力大小为116.27MPa,为提高悬挂架的可靠性与稳定性,选取直径较大的螺栓以加强悬挂架结构强度。
[4] 笔者在翻转犁的基础上设计了一种新型液压翻转犁,可以实现左右两个方向翻土,提高工作效率,并通过CATIA建立犁具模型,将悬挂机构模型导入到ANSYS Workbench,进行静力学与谐响应分析,判断所建模型是否满足实际加工需求。
1 液压翻转犁的整体设计及工作原理1.1 液压翻转犁犁体数量及总耕幅设计翻转犁工作时的工作阻力主要包括翻垡土壤阻力T1和翻转犁的正压力T2。
T1=TrF(1)式中:Tr为单位切削力,对于轻质壤土,取Tr=5×104;F为每次切下土块的横截面积。
F=a×h(2)其中:h为平均耕作深度,取h=0.25m。
土垡翻转比为k=h÷a(3)其中:k=1.27。
故a=0.25÷1.27=0.197F=a×h=0.197×0.25=0.05T1=TrF=0.05×5×104=2.5×103翻转犁的正压力为T2=Gf1(4)式中:f1 为土壤之间的摩擦系数,对于砂土,f1=0.53~0.75,取f1=0.75。
《大工件翻转设备翻转过程力学分析及180度翻转机方案设计》范文
《大工件翻转设备翻转过程力学分析及180度翻转机方案设计》篇一一、引言随着工业自动化程度的不断提高,大工件翻转设备在生产线上扮演着越来越重要的角色。
为了确保大工件在翻转过程中的稳定性和安全性,对翻转过程的力学分析显得尤为重要。
本文旨在分析大工件翻转过程中的力学原理,并设计一款180度翻转机方案,为相关设备的研发和应用提供理论支持。
二、大工件翻转过程力学分析1. 力学原理概述大工件翻转过程中,主要涉及到重力、摩擦力、惯性力等多种力的作用。
其中,重力是工件翻转的主要驱动力,摩擦力则影响翻转过程的稳定性和速度,惯性力则与工件的质量和加速度有关。
在分析过程中,需综合考虑这些力的作用,以确定工件在不同阶段的受力和运动状态。
2. 力学模型建立根据大工件的特点和翻转过程的实际情况,建立合适的力学模型。
模型应包括工件的质量、重心位置、支撑点、翻转轴等要素。
通过分析这些要素的相互关系和力的传递过程,可以更准确地描述工件在翻转过程中的受力情况和运动规律。
3. 力学分析方法采用动力学分析和静力学分析相结合的方法,对大工件翻转过程进行力学分析。
动力学分析主要关注工件在翻转过程中的加速度、速度和力的变化情况;静力学分析则主要分析工件在某一时刻的受力情况和平衡状态。
通过综合分析,可以确定工件在翻转过程中的稳定性和安全性。
三、180度翻转机方案设计1. 设计要求根据大工件的特点和翻转需求,制定180度翻转机的设计方案。
设计要求包括翻转精度高、稳定性好、操作简便、适用范围广等。
同时,还需考虑设备的结构、材料、驱动方式等因素,以确保设备的可靠性和耐用性。
2. 结构设计翻转机的结构设计是方案设计的关键部分。
结构应包括底座、支撑臂、翻转轴、驱动装置等部件。
底座用于固定设备,支撑臂用于支撑工件,翻转轴是工件翻转的关键部件,驱动装置则提供翻转的动力。
在设计过程中,需综合考虑结构的稳定性、刚度和重量等因素,以确保设备的性能和安全性。
3. 驱动方式选择驱动方式的选择对设备的性能和效率具有重要影响。
发动机翻转台架的设计及主要受力部件的分析

蜗 轮 咽 喉 母 圆 直 径 rg2=
=
20.37mm 3.3 齿根弯曲疲劳强度较核
当量齿数 Zv2=
=62.32
根据 X2=0 ZV2=62.32,查阅手册,得齿形系数 YFa2=2.3
螺旋角系数
Y茁=1-
酌 140毅
=1-
3.22毅 140毅
=0.977
许用弯曲应力 从查机械设计手册,得由灰铸铁制造的蜗轮的基本许 用弯曲应力[啄H]/=40MPa
· 36 ·
内燃机与配件
中心距公式如下:
淤确定作用在涡轮上的转距 T2 由发动机实际情况 T2=0.1伊98伊100=98N·M 由机械设计手册可知具有自锁性的传动比只有 i12=62 和 i12=82 在这里先设选 i12=62,且 Z1=1(传动比及反行程 具有自锁性),则 Z2=62。 于确定载荷系数 因工作较稳定,故取载荷分布不均系数 K茁=1 由表 11-5 选取 KA=1 由于转速不高,冲击不大,取 KV=1.05。 盂确定强性影响系数 ZE 因选用的是灰铸铁蜗轮和钢蜗杆相配,故 ZE=160MPa 榆确定接触系数 Zp 先假设蜗杆分度圆直径和传动中心距比值,机械设计 手册可查得 Zp=2.9 虞确定许用接触应力[滓H] 根据蜗轮材料为灰铸铁,可查得蜗轮的基本许用应力 [滓H]/=172MPa 应力循环次数
寿命系数
则 愚中心距计算
蜗轮喉圆直径
da2=d2+2ha2=d2+2m Nhomakorabea(h
* a
+x2)=152.5+2伊
2.5伊1=157.5mm
蜗轮分度圆直径 d2=mz2=2.5伊62=155mm 蜗轮齿根圆直径
df2 =d2
小型悬挂翻转双向铧式犁翻转机构的研究

= 8。一 cn La I ± 一 = 2l ( H ) 10 2 s { ( - √ 日 + a L ) i —{ ) + 由以上 推 导结果 可知 ,两犁 梁 的交 角 0 与 L H、均有 关 系 。 、 a 在 小 型 悬挂 翻 转 双 向 铧 式 犁 中 , 一
}I}
\ l
B -为拖拉机轮距 1
b 一犁体 幅宽
纺——
9 J l B i
由于轮 式拖 拉 机与 悬 挂犁 配 套 3
工作时 , 拖拉机的一个轮走在沟里 , 使拖拉 机横 向倾 斜 , 其倾斜 角 a sn = i 为了使犁柄座在悬臂犁粱上牢固安装, 在实际应用中可根据 犁体 幅宽 、 犁柄 座形状 及其 安装 位置 需要 适 当将 犁 梁加长 L 。 >1 5 式 中 卜 拖 拉机 后轮 中心 距 ;
J j J f1 — r『 j ¨一 一 Il ・ II
’ h
L可根 据采 用的 犁体 幅 宽确 I I
定, 如果 0>/ , I X 一个犁体工作 寸 … … l a
时, 另一个犁体就要和地面相碰。
4 限位板 上孑 ( ) 置 的确定 . L槽 位
般 a 1— 2 c H= O — 5 c : 8 O m: 5 O Om。
.
由图 1 可以看出
B1 :B+ b 28+ l 2 + b
n
j ) j
பைடு நூலகம்
r 土 、
J I
f J
) r -)
B: 1 2一 b B—b 2 8一 l 式中:
B 一为两犁 体之 间的距 离
悬挂犁在不同耕深作业时 ,倾斜角度也要调整 ,其调整值为
机械制造专业毕业论文--新型翻转犁挂接与翻转机构设计
前言随着农业生产的不断发展,翻转式双向犁的应用日益广泛。
80年代初,我国曾引进多种形式的翻转犁,这种犁要求:采用三点挂接方式,翻转犁的升降是通过上挂接点和拖拉机连接为主的液压装置,只适用于小型翻转犁的升降。
现采用的三点挂接方式,翻转犁升降下端两个对称的挂接点,以实现翻转犁的升降,挂接可靠,可提升较大重量的翻转犁。
犁架相对于悬挂架能作180°翻转,以实现左、右犁体的工位变换,进行梭式耕作。
翻转机构作为翻转犁的主要工作部件,直接影响整机工作性能。
但在其国产化进程中,存在结构复杂,断裂,磨损,翻转不可靠,工作位置不稳定等问题。
为此,我用现在所学的农业机械学知识和实物对比、观察,对其翻转机构进行设计。
摘要我国是一个农业生产大国。
现阶段,我国的农业生产是从农业机械化生产替代人力和小型农机具,以此来提高农产品总值,并有效的改善从事年农业生产者的生活条件。
现在,农机市场处于一种比较活跃的状态,各种农机具的研发和生产,推动了我国农业机械化的发展。
翻转犁的投入和生产是农机市场经济的重要部分。
翻转犁主要用于耕地、整地,大多数农作物在播种或者栽培前都要对土壤进行改善,为其提供一个良好的生长环境。
翻转犁主要是由犁头架、犁梁、犁体、合墒器等组成,它的挂接方式与其它农机具是基本相同的,但是翻转犁在工作时不仅需要动力部分牵引悬挂,而且需要犁头架对整个犁组翻转。
犁头架作为双向翻转犁的重要部分,既起到挂接牵引作用,又起到翻转作用。
本次设计将围绕犁头进行阐述和设计。
关键字:挂接牵引翻转机构犁头架1绪论1.1本课题来源及研究的目的和意义21世纪,我国全面进入了全面建设小康社会,加快推进社会主义现代化的发展阶段,我国农业和农村经济也进入了新的历史发展时期。
农业现代化进程加快、农业和农村经济战略统一化,必然要求农业机械向更广的领域,更高的水平上发展。
农机化发展面临新机遇,农业现代化对农业机械化形成了巨大需求。
农业机械是农业生产力的重要组成部分,而农业整地机械不仅是农业机械的先头组成,更是农业生产的开始,因此,在活跃的农业现代化发展上有着不可忽视的地位。
某翻转机构的力学分析

某翻转机构的力学分析张敏强;郑国威;宫经珠;段生记【摘要】给出了某雷达天线的翻转机构,介绍了该机构以电动推杆为驱动单元,推动雷达天线翻转的工作原理和结构设计过程,对翻转机构进行了力学分析和稳定性计算.该机构已成功地应用到某天气雷达上.【期刊名称】《机械工程师》【年(卷),期】2012(000)007【总页数】2页(P132-133)【关键词】翻转机构;力学分析;稳定性计算;电动推杆【作者】张敏强;郑国威;宫经珠;段生记【作者单位】西安电子工程研究所,西安710100;西安电子工程研究所,西安710100;西安应用光学研究所,西安710065;西安电子工程研究所,西安710100【正文语种】中文【中图分类】TH1231 引言为了满足某天气雷达的机动性能高、雷达天线可自动架设撤收,以及满足雷达适合多种运输方式要求,设计了一套天线翻转机构。
该翻转机构的工作原理是:以电机为动力源,电机驱动螺母丝杠机构,实现天线在工作状态和运输状态间的转换。
雷达在阵地工作时,翻转机构使天线翻转升起到一定的高度,以克服车头对天线的影响。
雷达撤收时,翻转机构使雷达天线倒伏在设备舱内。
翻转机构的丝杠为普通梯形丝杠,可以保证天线在工作状态和撤收状态之间能任意位置自锁。
2 某翻转机构的结构设计如图1所示,该雷达翻转机构由翻转支座、电动推杆机构、翻转平台、天线及天线座、锁定机构和支撑底座等部分组成。
图1(a)为该雷达撤收状态的示意图。
雷达运输时,天线处于水平放置状态;图1(b)为该雷达工作状态的示意图,雷达工作时,翻转机构将翻转平台进行90°旋转,将天线竖起,通过锁定机构将翻转平台锁定,以提高翻转机构的整体刚度。
图1 天线翻转机构2.1 翻转机构的设计该雷达翻转机构是以四连杆机构中的摇杆机构为基础,通过电动推杆实现的[1]。
其工作原理是电机驱动电动推杆,电动推杆伸长,电动推杆推动翻转平台旋转。
该机构将电动推杆的直线运动转化为雷达天线的翻转运动,具有很高的重复定位精度,能够满足雷达天线快速反复架设和撤收要求[2,3]2.2 电动推杆的推力计算当推起天线翻转的仰角为α时,此时电动推杆的推力为F,推杆力矩为h,考虑到风载荷Ff对雷达天线的影响,分别对翻转支点O取距,其中L为天线重心到翻转支点的距离,L0为天线面到翻转支点的距离,其受力模型简化为图2所示。
立式设备翻转竖立受力分析与预防措施
立式设备翻转竖立受力分析与预防措施发布时间:2021-06-17T14:53:11.120Z 来源:《基层建设》2021年第6期作者:裴永旗洪建党[导读] 【摘要】:较长的立式设备往往采用卧式运输方式到场,就位前需进行翻转竖立作业,翻转竖立过程中,吊机负荷逐渐增加,直至设备翻转完成,载荷完全转移至吊机。
中国核工业二三建设有限公司 101300【摘要】:较长的立式设备往往采用卧式运输方式到场,就位前需进行翻转竖立作业,翻转竖立过程中,吊机负荷逐渐增加,直至设备翻转完成,载荷完全转移至吊机。
本文以某电站重要设备为例进行分析,该设备长21,000㎜,净重328t,吊装重量377t,是该厂房尺寸最大、重量最重的设备,其吊装安装施工也是工程重要施工节点;整个吊装施工可细分为倒运、翻转和就位几个过程,翻转竖立作业是吊装施工过程中最为重要的一个环节,翻转竖立过程中的受力状态、危险点,以及所采取的措施,是吊装安装施工质量与安全的重要保障。
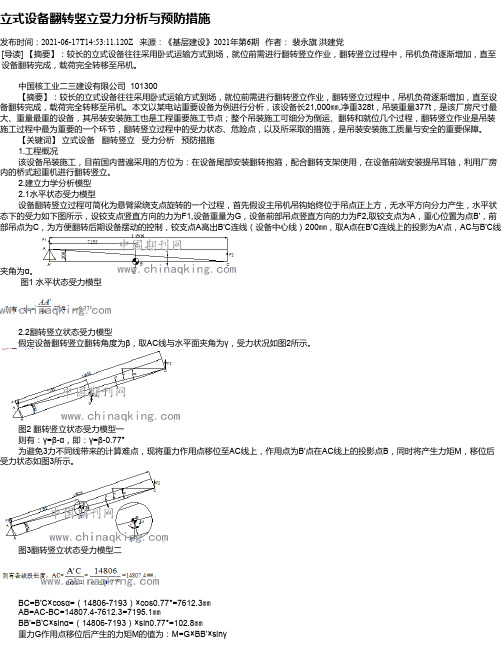
【关键词】立式设备翻转竖立受力分析预防措施1.工程概况该设备吊装施工,目前国内普遍采用的方位为:在设备尾部安装翻转抱箍,配合翻转支架使用,在设备前端安装提吊耳轴,利用厂房内的桥式起重机进行翻转竖立。
2.建立力学分析模型2.1水平状态受力模型设备翻转竖立过程可简化为悬臂梁绕支点旋转的一个过程,首先假设主吊机吊钩始终位于吊点正上方,无水平方向分力产生,水平状态下的受力如下图所示,设铰支点竖直方向的力为F1,设备重量为G,设备前部吊点竖直方向的力为F2,取铰支点为A,重心位置为点B',前部吊点为C,为方便翻转后期设备摆动的控制,铰支点A高出B'C连线(设备中心线)200㎜,取A点在B'C连线上的投影为A'点,AC与B'C线夹角为α。
图1 水平状态受力模型2.2翻转竖立状态受力模型假定设备翻转竖立翻转角度为β,取AC线与水平面夹角为γ,受力状况如图2所示。
翻转犁翻转机构的运动与受力分析

的翻转所需要的动力。
3. 液压系统可实现机 构的翻转和液压锁 定的
性能要求。
将参数代入式 ( 5), 得:p = 91. 49N / cm
由于摩擦因数与压力成正 比, 从手册中可 以查当 p = 91. 49N / cm² 时, 滑动摩擦 因数 f 1 = 0 .1486,当量摩擦因数 f 0 = 1. 27, 则总摩擦因数 f = 0.1887, 摩擦圆 半径为ρ= f × r = 0. 1887 × 60 = 11.3233mm, 其中 r 为轴颈半径 (图中未 画 ) , 如图 4所示。
P1H + G rx - F1 r-2Mf = 0
式中: F1 = Mar =Gar/g, r = 0. 285m, p1 = 0. 0113, M f =Wp1 = 623. 28N/m, G = 9339. 4N, rx = r si nθ, a r 为切向加速度, H = asi nθ/L
为计算出油缸上的受力大小, 作机构的 转向速度图, 并把机构上的力移到速度 图中的对应点 E 上, 如5( b)所示, 对 E 点取矩, 得方程式:
2 机构的动态静力分析
”
在机构的运动学分析中, 已经了解到机构在油缸作 用下运动时, AB (AD )杆的角速度随θ的变化而 变化, AB 杆作加速运动, 机构除受重力 G 和摩 擦阻力M f的作用外, 还受到惯性力 F 的作用. 当油缸收缩在角 90 ~ 0 时, 机构受力情况如图 5( a)所示。
133. 3Nm, 而机构的阻力矩 M z = 2M f - Grx = 66. 12Nm, 可见,
03
M p≥M z, 所示机构 AB 杆可以越过自锁区 (死点 ), 油缸开始伸长, 油缸的工作推力为 3414~ 3700N, 这 样即完成了翻转的全过程。
第4章 犁耕机组

§4-6机组操向性
1、讨论:
1)δ1=0,∆S=0,正牵引
2) δ1≠0,∆S=0, 斜牵引
由于拖拉机较重,而Qy较小,一般不会影响操 向性
3) δ1=0,∆S≠0,偏牵引
会产生转动力偶,要有平衡力偶N-N,有时,要 前轮斜行才能平衡
4) δ1≠0,∆S≠0,偏牵引
只要前轮减重不大,或前轮与土壤的摩擦力够大, 不影响操向性
16
∴∆N=Pzx.S/L
L已定,Pzx不希望太大,只能S 大些。
牵引力P=f.F=f.(∆N+G’)
f—附作系数
1)高度调节时:
a↑,Rzx↑,Qzx↑,阻力↑,∆N↓∴效率↓ 2)力调节时: a↑,Rzx↑,∆N↑;犁提升时,向下的反作用力 ∆N↑∴力调节的增重效果明显!
水田由于∆a变化不大,高度调节增重效果也明显。
10
§4-5耕宽和耕宽稳定性
1、耕宽调整 B=b.n±∆B 1)第一犁漏耕和重耕 通过曲拐轴的调整,改变犁侧板与沟墙的压力 2)耕宽稳定性分析 悬挂机构瞬心π 2对耕宽 稳定性的影响 a)落在犁的后方 负反馈系统 b)落在无穷远处 平行四边形
11
§4-5耕宽和耕宽稳定性
c) π 2落在犁的前方 正反馈系统
2
3
§4-1犁耕机组
4
§4-2入土性能
如果不合理:1)入不了土;2)达不到深度 1、入土过程
靠重力下落 入土行程s:=(多铧犁最后一个)从接触地面到达耕深 所走过的距离。 2、犁体顺利入土的条件 几何条件(入土角) 力学条件(入土力矩)
5
§4-2入土性能
几何条件:必须要有入土角 犁的纵垂面悬挂机构瞬心π 1的 配置 力学条件(入土力矩)
《机械研究与应用》2008年第21卷1~6期总目次

液压驱动 车辆加速模式的研究…… 王 弦 , 胡军科 , 培( 1 4:8 龙 2 ) 2 凸轮检测 闸式剪板机刃口间隙的分析研究………… 王治杰( 1 4 3 2): 0 油管螺纹粘扣的现场作业影响因素分析 … 王百战 , 卢林祝( 1 4 3 2 ) :2 高压水射流切割效能研究 …… 张昊宇 , 辉 , 震, 2 ) : 李 刘 等( 1 5 l 5 种新型微泡发生器的流场仿真研究 ………………………………… 魏 亚 飞 , 晓京 , 杨 谢 军 ( 1 5 l 2 ) :7 应用压力传感器控制立缆机放线电机的研究 ………………………… 李学京 , 孙 淼, 丁必 荣 ( 1 5 2 2 ) :0 汽车传动轴中问支承及变速器输出轴受力分析…… 盂 N( 1 52 2 ) :3 纵 向涡发生器在空气预热器中的强化传热数值模拟研究 …………… 刘尹红 , 卿德藩( 1 6 1 2 ) :8 自 增强技术的研究 …………… 高军伟 , 谢光伟 , 周后俊, 2 ) :1 等( 1 6 2 两栖车辆与磁流体推进技术研究 ……………………………………… 苏凡囤, 程 荃, 王海涛( 1 62 2 ) :4 覆盖件模具型面高速切削数控加工方式研究……… 万余仙( 1 62 2 ) :7 基于性能退化数据的航空液压泵可靠性分析 ………………………… 方 峻, 魏 星 , 黎 霞 ( 1 63 樊 2 ) :0 平面 I V级杆组构形研究 …………………………… 范雪兵( 1 63 2 ) :4 自动化集装箱码头低架桥横梁振动与小车行走速度的关系 ………… 郑 苏, 唐世营( 1 63 2 ) :6 基于虚拟样机技术的液动射流冲击器动态仿真分析 ………………… 王清 岩 ( 1 64 2 ) :0
《课题三旋转构件的运动分析和动力分析》PPT课件

质点的达朗贝尔原理
FT=FN+F FT=man
FT-man=0
FT+FI=0
--质点的达朗贝尔原理
动:代表研究对象是动力学问题。
静:代表研究问题所用的方法是静力学方法。
动静法
质点所受的主动力F、约束 力N和惯性力FI三者的矢量和 等于零这种关系常被说成 “F、N、FI 三者构成平衡力 系”,(在形式上组成平衡 力系)利用这三个矢量的静 力平衡方程可以求出动反力。 这就是动静法的实质。这种 方法可以推广应用于质点系 (包括刚体)。
ω=φ/t
力矩或力偶矩功率等于力矩或力偶矩与构件角速度的乘积。
当构件的转速为n, M=n n
60 30
当P的单位为KW,转速的单位为转/分(r/min),则
M=30×1000P/∏n =9550P/n N.m
对于转动构件,转矩与功率成正比, 与转速成反比。汽车爬破时需要降低车 轮的转速来增大转矩,以增加爬坡的能 力。
质点的达朗贝尔原理质点所受的主动力f约束力n和惯性力fi三者的矢量和等于零这种关系常被说成fnfi三者构成平衡力系在形式上组成平衡力系利用这三个矢量的静力平衡方程可以求出动反力
课题三 旋转构件的运动分 析和动力分析
一、转动速度 二、转动加速度 三、惯性力的概念 四、动静法 五、 定轴转动刚体的动静法 六、功和功率
F FN FI 0
例 已知:m=200kg,e=0.5mm,
n=6000r/min,求当飞轮质 心C转到最低位置时轴承的 约束反力. 解:(1)确定研究对象:飞轮和转轴 (2)分析所受的主动力(飞轮的重力)和约束力
(轴承的约束反力)惯性力 (3)分析运动,确定加速度:飞轮匀速转动,角
加速度=0,因此只需加惯性力. (4)、用静平衡方程求解
法国格里格尔-贝松液压翻转犁性能测试

1 . 2 . 4 每 个 犁体 可调 节 多种 工作 宽度 每 个 犁 体 有 5种 工 作 宽度 , 可调范围 3 0 ~5 0 c m, 用 户 根 据 土壤 阻 力、 土 质情况 及 工作 条件 , 可任 选一 种工 作 宽度 。
与油 缸座 、 犁 架连接 带 动 中心轴 在 中心轴 套 内做 回转运 动 。
1 . 2 性 能
1 . 2 . 1 结构 结 实 、 牵 引动 力 适 用 范 围 大
HRP 7型 五 铧 犁 , 牵 引 犁 头 翻 转 轴 颈 规 格 1 1 5 mm、 犁 梁 规 格
1 5 0 mm×1 5 0 mm, 拖拉 机动 力适用 1 3 2 ~1 6 9 k W 。翻转犁 的 牵 引犁 头 翻 转轴 颈 和 犁 梁是 其 结 构 强度 因素 中 的重 要构 件 , 也是 衡量 整体 结构 强度 的 2个重 要指 标 。 1 . 2 . 2 设备 采 用 高强度材 质钢 材 制造 , 机 器重 心靠 前 , 对 于拖拉 机 的后 提 升 十 分有 利 犁 的重 心 相对 拖 拉
收 稿 日期 : 2 0 1 3 — 0 4 一 i i
现 代 化 农 业
2 0 1 3年 第 6期 ( 总第 4 0 7期 )
・ 4 7 ・
农 用 柴油 机 难 起 动 的原 因及 解 决 办法
王能斌 , 杨 再 权
( 黑龙 江 省 八 五 四 农 场 , 黑龙江 虎林 1 5 8 4 0 3 )
业地 块 等较 长距 离时 , 在拖 拉机 上从 悬挂 位 置改 为牵 引行 走位 置 , 避 免拖 拉机 悬挂 犁行 走 时对拖 拉机 后悬 挂
系 统造 成损 坏 。
《大工件翻转设备翻转过程力学分析及180度翻转机方案设计》
《大工件翻转设备翻转过程力学分析及180度翻转机方案设计》篇一一、引言随着工业自动化水平的不断提高,大工件翻转设备在众多领域得到了广泛应用。
本文旨在深入分析大工件翻转过程中的力学原理,并基于这些原理设计一款高效、稳定的180度翻转机。
本文首先对大工件翻转的基本概念进行阐述,然后分析翻转过程中的力学原理,最后提出翻转机方案的设计思路和实施步骤。
二、大工件翻转过程力学分析大工件翻转过程中涉及到的力学原理主要包括重力、摩擦力、惯性力等。
在翻转过程中,这些力将对工件的稳定性和翻转效率产生重要影响。
首先,重力是影响工件翻转的主要因素之一。
在翻转过程中,重力使工件产生向下的趋势,需要通过设备的支撑和旋转来平衡这种力。
其次,摩擦力也是影响工件翻转的重要因素。
工件与设备之间的摩擦力必须足够大,以保证工件在翻转过程中不会滑落或移位。
最后,惯性力也是需要考虑的因素,特别是在工件质量较大或翻转速度较快的情况下,惯性力将对设备的稳定性和工件的定位精度产生影响。
三、180度翻转机方案设计基于大工件翻转过程的力学分析,我们设计了一款高效、稳定的180度翻转机。
以下是该方案的设计思路和实施步骤:1. 设计原则(1)稳定性:确保设备在运行过程中保持稳定,避免工件滑落或移位。
(2)高效性:优化设备结构,提高工件的翻转效率。
(3)可调性:根据不同工件的尺寸和重量,调整设备的参数以适应各种工件的翻转需求。
2. 设备结构(1)底座:采用坚固的材料制成,以提供稳定的支撑。
底座上设有调节装置,可根据工件的尺寸和重量进行调整。
(2)旋转机构:包括电机、减速器和旋转轴等部件。
电机驱动旋转轴使工件进行旋转,减速器用于控制旋转速度和扭矩。
(3)定位装置:用于固定工件的位置,防止在翻转过程中发生移位。
定位装置可根据工件的形状和尺寸进行调整。
(4)安全防护装置:包括防护罩、紧急停止按钮等,确保操作人员的安全。
3. 工作流程(1)将工件放置在底座上,调整定位装置以固定工件位置。
翻转犁翻转机构的运动与受力分析
根据轴承的结构, 可确定是跑合轴颈, 的单位压力为:
p = N/s=W/(πd×L3)
轴颈
由 WL 2 = GL 1, 得 W = GL 1 /L 2 = 55162. 7N
式中: p 为轴颈单位压力; W 为轴颈 受力; d 为轴的直径; L 3 为轴颈的接触长度。 将参数代入式 ( 5), 得:p = 91. 49N / cm
根据式 ( 2)、( 3)、( 4)可确定不同的 a、 R、L 及相关参数值, 计算出 AB 杆转动 到某一位置的角速度和角加速度, 绘出 传动特性曲线, 如图 2 所示。可多方案 比较以选择最佳方案。例如, 较常见的 一组参数值 为: a = 0. 12m、R = 0. 506m、油 缸的 缩短 速度 v = 0.07m / s、油缸的 传动 比 K = 1. 46。当 需要 将犁 翻转180 时, 操纵液压输出手柄, 使翻转油缸收缩, AB 杆转动, 角从 90 减小到 0 (即 B 点在 y 轴上 ) , 再由0 转到 - 90 , 当 角由 90 减 小到 60 时, 角速度值为 0. 6667~ 0. 6166, 角加速度 值为 - 0. 0807~0. 1085, 角速度和角加速度变化都很小, 由 此看出, 无论油缸是静止还是工作状态 均是平稳的, 对液压系统也有益。
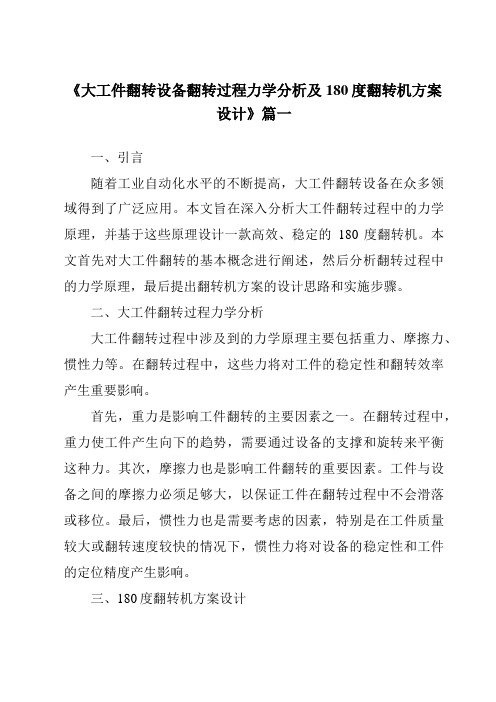
单缸卧式翻转犁翻转机构的运 动与受力分析
成员
摘要
首先提出单缸卧式翻 转机构运动方程,并从 机构的运动和动力基 础出发,绘出传动特性 曲线,对机构进行运动 学和动力学特性的分 析。通过分析证明这 一翻转机构的工作稳 定性及可行性,为翻转 机构的设计与应用提 出了相应的设计理念 及设计应用依据
实物图
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 2 机构的动态静力分析 在机构的运动学分析中, 已经了解到
机构在油缸作用下运动时, AB (AD )
杆的角速度随θ的变化而变化, AB 杆
作加速运动, 机构除受重力 G 和摩擦 阻力M f的作用外, 还受到惯性力 F 的作用.当油缸收缩在角 90 ~ 0 时, 机构受力情况如图 5( a)所示。 为计算出油缸上的受力大小, 作机构 的转向速度图, 并把机构上的力移到 速度图中的对应点 E 上, 如5( b)示, 对 E 点取矩, 得方程式:
1 翻转机构的运动分析
如图 1所示, 在单缸卧式翻转机构简图 中, A、C为固定支点, AC 长度为 a, AB 长度为 R, BC 长度 为L 0, 当拖拉机发 动机的转数不变时, 翻转机构的油缸作 匀速运动, 即 v1为常数。AB 和 AC 的 夹角为θ, 为满足翻转犁能在工作过程中 翻转 180度 , 要求 AB 杆在油缸的作用 下必须能转动 180 。 角的变化范围应 在整个水平面内, 即 可在 正负 90度 的 范围内变化。所以,该机构为运动导杆 机构,能够完成上诉运动的必要条件为
P1H + G rx - F1 r-2Mf = 0
得:p1=(F1r+2Mf-Grx)/H
式中: F1 = Mar =Gar/g, r = 0. 285m,
p1 = 0. 0113, M f =Wp1 = 623. 28N/m, G = 9339. 4N, rx = r sinθ, a r 为切向加速度, H = asinθ/L
(2) 从动力学特性看, 机构可以保证实现 180
的翻转所需要的动力。
(3) 液压系统可实现机构的翻转和液压锁定的
性能要求。
θ 当机构的 AB 杆越过中间位置 ( = 0 )后 在 0~ - 90 区间运动时, 机构 受力情况如图 6 ( a)所示,
并作转向速度图, 如图 6( b)所示,
r 对 E 点取矩, 得:p 1 'H + G x r 2M f + F1 = 0则: p 1 ′= (2M f - F 1 r- Grx)/H。机构所产生的驱动
a + L min≤R ≤a + L max
图 1所示的机构中, 由三角形 ABC 可得机构的
运动方程:
L²=a²+R²-2aRcosθ (1) cosθ =(a²+R²-L²)/2aR (2)
油缸伸缩将使 L 值发生变化, cos θ也随之改变。 对式 ( 1)进行一次微分和二次微分, 可得到 AB 的 角速度和角加速度:
= 0. 160m, d = 0. 12m, 求轴颈 的压力。
根据轴承的结构, 可确定是跑合轴颈, 的单位压力为:
p = N/s=W/(πd×L3)
轴颈
由 WL 2 = GL 1, 得 W = GL 1 /L 2 = 55162. 7N
式中: p 为轴颈单位压力; W 为轴颈 受力; d 为轴的直径; L 3 为轴颈的接触长度。 将参数代入式 ( 5), 得:p = 91. 49N / cm
2 1 机构自锁区域的确定翻转机 构在翻的全程, 当角等于0 时, A、B、C 三点在一条直线上, 这时油缸无论施加多大的力, 机构都不能运动。不仅如此, 由于轴颈 A 在转动时有 摩 擦阻力产生, 因此将在等于0
附近的很小区域内存在自锁 区 (死点区 )。确定自锁区的 计算如图 3所示。
已知: G = 9339. 4N, L 1 = 1. 831m, L 2 = 0. 310m, L 3
力矩 M p = J ε= 133. 3Nm, 而机构
r 的阻力矩 M z = 2M f - G x = 66.
12Nm, 可见,
M p≥M z, 所示机构 AB 杆可以越
过自锁区 (死点 ), 油缸开始伸长, 油 缸的工作推力为 3414~ 3700N, 这 样即完成了翻转的全过程。
3结论 ( 1) 单缸卧式翻转机构的运动学特性表明, 在其实 现 180 的翻转过程中, 自身结构有利于翻转机构 启动并越过自锁区, 翻转到终点时无冲击 (或冲击 最小 ) , 达到翻转过程平稳的要求。
由于摩擦因数与压力成正 比, 从手册中可以查当 p = 91.
49N / cm²时, 滑动摩擦因数
f 1 = 0 .1486,当量摩擦因 数 f 0 = 1. 27, 则总摩擦因数
f = 0.1887, 摩擦圆半径为ρ=
f × r = 0. 1887 × 60 = 11.3233mm, 其中 r 为轴颈 半径 (图中未画 ) , 如图 4所 示。
当角由 60 减小到 5 时, AB 杆的角速度由 0. 6166增加到 5. 1973, 角速度迅速增长, 角加速由 0. 1085增长到 300以上, 角 加速度也急剧增长, 尤其在 接近 0 时, 由于大的角加速度将产 生大的惯性力, 这正是机构翻转时越过中间自锁区时所需要的 特性。当 AB 杆由 = - 5 减小到= - 60 时, 角速度值由 3. 4326 减小到0.4215, 角加速度值由 - 203. 9 急剧减小到 - 0. 09; 当 AB 杆由 θ = - 60 减小到 θ = - 90 时, 角速度 值 由 0.4215减小 到 0. 4147, 角加速度值由 - 0. 09减小到0. 0364, 角加速度变化 很小。这样, 当犁翻转动作结束时, 角速度和角加速度都接近于 0, 使所产生的惯性力很小, 机构很平稳地结束工作, 这一特性正 是所要求的。所以, 机构设计参数的选择是合理的。
根据式 ( 2)、( 3)、( 4)可确定不同的 a、 R、L 及相关参数值, 计算出 AB 杆转动 到某一位置的角速度和角加速度, 绘出 传动特性曲线, 如图 2 所示。可多方案 比较以选择最佳方案。例如, 较常见的 一组参数值 为: a = 0. 12m、R = 0. 506m、油 缸的 缩短 速度 v = 0.07m / s、油缸的 传动 比 K = 1. 46。当 需要 将犁 翻转180 时, 操纵液压输出手柄, 使翻转油缸收缩, AB 杆转动, 角从 90 减小到 0 (即 B 点在 y 轴上 ) , 再由0 转到 - 90 , 当 角由 90 减 小到 60 时, 角速度值为 0. 6667~ 0. 6166, 角加速度 值为 - 0. 0807~0. 1085, 角速度和角加速度变化都很小, 由 此看出, 无论油缸是静止还是工作状态 均是平稳的, 对液压系统也有益。
单缸卧式翻转犁翻转机构的运 动与受力分析
成员
摘要
首先提出单缸卧式翻 转机构运动方程,并从 机构的运动和动力基 础出发,绘出传动特性 曲线,对机构进行运动 学和动力学特性的分 析。通过分析证明这 一翻转机构的工作稳 定性及可行性,为翻转 机构的设计与应用提 出了相应的设计理念 及设计应用依据
实物图
2 翻转机构受力分析
翻转机构在工作中受重力、惯性力和摩擦力等外 力的作用, 为使机构能完成翻转的全过程, 需施加 一个力以克服这些外力。为确定油缸的受力大小、 结构尺寸和机构的强度等必须进行动力分析。
由图 1可看出, 机构主要受到 3个力的作用, 机具 重心 D 点受到重力 G 和惯性力 F = m•ar的作用,A 点受到摩擦阻力矩 M f的作用, 其他力均较小, 可 忽略不计