卫星光通信粗瞄系统双绕组电机模糊滑模控制
模糊复合算法在MPPT控制系统中的应用
模糊复合算法在MPPT控制系统中的应用王玉玲;乔凤斌;苏宪法;陈威【摘要】为了兼顾MPPT系统的快速响应和高精度的问题,文章提出了一种新型的模糊复合算法.首先给出了等效模糊模型复合的控制方法,然后采用在线学习的形式来不断改进模型以逼近真实模型.验证结果表明,算法具有良好的鲁棒性和适应性,能够使光伏发电系统稳定、高精度地工作在最大功率点附近.【期刊名称】《可再生能源》【年(卷),期】2014(032)009【总页数】6页(P1327-1332)【关键词】模糊算法;自学习算法;复合算法;MPPT控制【作者】王玉玲;乔凤斌;苏宪法;陈威【作者单位】上海航天设备制造总厂研发部,上海201100;上海航天设备制造总厂研发部,上海201100;上海航天设备制造总厂研发部,上海201100;上海航天设备制造总厂研发部,上海201100【正文语种】中文【中图分类】TM6140 引言随着新能源技术的不断进步,光伏产业迅速发展,光伏系统的工作效率已成为一个热点研究对象[1]。
对于一个固定的光伏器件而言,其输出功率主要受到外部环境(如日照强度和电池板温度)的影响,可以视为一个二元非线性函数。
为了获得最大的输出功率,必须在发电系统工作过程中采用MPPT方法调节电路中的等效阻抗[2],[3]。
现有MPPT控制算法主要包括固定参数法、扰动观察法、电导增量法以及各种方法结合、定电压跟踪法[4]。
固定参数法具有控制简单易行,硬件实现方便等优点,但是该方法的精度不高。
扰动观察法(perturb and observe algorithm,P&O)是目前用于高精度MPPT较为成功的一种典型方法,但是该方法扰动步长的设定不好把握,在环境变化较剧烈的时候,容易发生失序误判的现象[5],[6]。
电导增量法相对扰动观察法而言较为平稳,但是该方法存在求导和乘除运算,增加了微处理器的运算负担,并且容易受到干扰而产生误判[7],[8]。
空间光通信精跟踪系统的模糊自抗扰控制
空间光通信精跟踪系统的模糊自抗扰控制崔宁;陈兴林;曹开锐;于志亮;徐川川【摘要】针对输入光束抖动及卫星本体微振动对空间光通信系统跟踪精度的影响,设计了模糊自抗扰控制器,提出了对精跟踪系统进行控制的方法.首先,建立了精跟踪系统模型,对系统内外扰动进行分析,并模拟了卫星振动信号.针对系统自身所受的扰动及输入光信号的不确定性,设计了模糊自抗扰控制器.提出的控制方法通过扩张状态观测器观测卫星本体振动及系统未建模动态,应用微分跟踪器提高系统动态响应性能,并用模糊控制原理改进了非线性状态误差反馈控制律,使其可以自适应调整比例和微分增益.最后进行了实验分析,结果表明:与PID控制方法相比,模糊自抗扰控制方法在不同频率及幅值的输入信号下均能提高系统跟踪精度,跟踪精度可以达到±8 μrad,跟踪误差减小了50%左右.该方法基本满足空间光通信精跟踪系统对跟踪速度、跟踪精度及抗干扰能力的要求.【期刊名称】《光学精密工程》【年(卷),期】2015(023)005【总页数】7页(P1394-1400)【关键词】空间光通信;精跟踪;模糊自抗扰;卫星振动【作者】崔宁;陈兴林;曹开锐;于志亮;徐川川【作者单位】哈尔滨工业大学航天学院,黑龙江哈尔滨,150001;哈尔滨工业大学航天学院,黑龙江哈尔滨,150001;哈尔滨工业大学航天学院,黑龙江哈尔滨,150001;哈尔滨工业大学可调谐激光技术国家级重点实验室,黑龙江哈尔滨150001;哈尔滨工业大学航天学院,黑龙江哈尔滨,150001;哈尔滨工业大学航天学院,黑龙江哈尔滨,150001【正文语种】中文【中图分类】TN929.11 引言空间光通信的光束束散角小,传输距离长,另外还受空间环境及卫星本体振动的影响,故其捕获、瞄准和跟踪(Acquisition,Pointing and Tracking,APT)过程都很困难[1-2]。
目前,国内外主要采用粗、精跟踪系统耦合的嵌套技术来实现光通信的精密跟踪。
控制系统的神经网络模糊混沌滑模控制方法

控制系统的神经网络模糊混沌滑模控制方法控制系统的神经网络模糊混沌滑模控制方法是一种应用于复杂控制系统中的先进控制技术。
该方法通过神经网络模型的建立和混沌滑模控制策略的设计,实现对系统动态特性的有效控制。
本文将详细介绍控制系统的神经网络模糊混沌滑模控制方法的原理与应用。
1. 神经网络模型的建立神经网络模型是控制系统中关键的一部分,通过拟合系统的非线性映射关系,实现对系统输入和输出之间的关系建模。
神经网络模型通常由输入层、隐含层和输出层组成,其中隐含层的神经元数量和连接权值决定了模型的表达能力。
在建立神经网络模型时,可以使用多种算法进行参数训练,例如反向传播算法、遗传算法等。
2. 模糊混沌滑模控制策略的设计模糊混沌滑模控制策略是控制系统中的一种优化控制方法,通过结合模糊控制理论和混沌理论,实现对系统的快速响应和鲁棒性改善。
该策略的核心思想是将混沌系统引入到滑模控制中,通过混沌系统的随机性和非线性特性,增加系统对干扰和参数变化的抵抗能力。
同时,利用模糊控制的模糊逻辑和推理能力,提高系统的自适应性和鲁棒性。
3. 控制系统的性能指标与优化方法在神经网络模糊混沌滑模控制方法中,性能指标的选择与优化方法的设计是至关重要的。
常见的性能指标包括响应速度、超调量和稳态误差等,可以根据具体的应用需求进行调整和优化。
优化方法主要包括参数整定和控制策略的选择,可以使用各种优化算法进行参数搜索和求解最优解。
4. 案例分析与仿真实验为了验证控制系统的神经网络模糊混沌滑模控制方法的有效性,本文将以某电力系统的调度控制为例进行案例分析和仿真实验。
通过对电力系统的动态特性建模和仿真,可以评估控制系统的性能和鲁棒性,并对系统参数进行优化和调整。
综上所述,控制系统的神经网络模糊混沌滑模控制方法是一种先进的控制技术,具有良好的控制效果和鲁棒性。
通过神经网络模型的建立和混沌滑模控制策略的设计,可以实现对复杂控制系统的高效控制和优化。
然而,在具体应用中,还需要综合考虑系统的特性、性能指标和优化方法,以实现最佳的控制效果。
基于模糊逻辑双环控制的光伏发电系统最大功率跟踪算法
基于模糊逻辑双环控制的光伏发电系统最大功率跟踪算法苏海滨;王光政;王继东
【期刊名称】《电力系统保护与控制》
【年(卷),期】2010(038)021
【摘要】根据光伏阵列非线性伏安特性,提出了基于模糊逻辑双环控制光伏阵列最大功率跟踪算法,使得光伏阵输出功率接近于理论最大值.系统主要由单相逆变器、控制器和交流水泵机组组成,主控制环实现光伏阵列最大功率跟踪初级模糊控制算法,输出为最大功率点处电压.该电压作为逆变控制器参考输入电压,内环模糊控制用于控制变频器输出频率,进一步控制交流水泵机组的输出功率,实现了更高精度的跟踪光伏阵列最大功率点跟踪.实验结果表明,所提出算法能有效提高光伏阵列的输出效率.
【总页数】5页(P215-218,226)
【作者】苏海滨;王光政;王继东
【作者单位】华北水利水电学院电力学院,河南,郑州,450011;华北水利水电学院电力学院,河南,郑州,450011;华北水利水电学院电力学院,河南,郑州,450011
【正文语种】中文
【中图分类】TM762
【相关文献】
1.基于二分法的光伏发电系统最大功率跟踪算法 [J], 袁晓玲;李世军;王闯;闫荣超
2.基于DSP的光伏发电系统中最大功率点跟踪算法的研究 [J], 王红敏;曹建建
3.基于模糊控制的光伏发电系统最大功率点跟踪算法研究 [J], 巩瑞春;王瑞虹
4.光伏发电系统最大功率点跟踪算法分析 [J], 夏须
5.光伏发电系统中最大功率跟踪算法分析与研究 [J], 董媛媛;李二孟
因版权原因,仅展示原文概要,查看原文内容请购买。
卫星光通信高速精确跟踪瞄准实现技术
卫星光通信高速精确跟踪瞄准实现技术陶坤宇;王富;周彦平;马晶【期刊名称】《哈尔滨工业大学学报》【年(卷),期】2008(40)11【摘要】为了实现卫星光通信高速精确的跟踪瞄准,利用模块化思想设计,设计了一套采用目前先进的DSP技术的嵌入式系统,实现卫星光通信精确跟踪瞄准中快速图像跟瞄控制,该系统以TI公司高性能DSP芯片TMS320C6713B力图像实时处理单元,利用复杂可编程逻辑器件(CPLD)和现场可编程门阵列(FPGA)分别对由图像传感器CCD采集的图像数据进行实时采集和显示,在该平台上,运用最大类问方差法求得最佳图像分割阈值,将图像分割后利用质心算法精确计算光斑形心坐标;根据目标的真实运动轨迹对光斑运动趋势进行估计,使系统工作于预测跟踪状态,保证了卫星光通信跟瞄控制的响应带宽要求,实验结果表明,当CCD的视闯为100×100时,系统图像处理速度可以达到625帧/s.【总页数】6页(P1707-1711,1745)【作者】陶坤宇;王富;周彦平;马晶【作者单位】哈尔滨工业大学,航天学院,哈尔滨,150001;上海航天技术研究院,上海,200090;哈尔滨工业大学,航天学院,哈尔滨,150001;哈尔滨工业大学,航天学院,哈尔滨,150001;哈尔滨工业大学,航天学院,哈尔滨,150001【正文语种】中文【中图分类】TN929.13【相关文献】1.在国际空间站与地面间光通信链路中瞄准、跟踪分系统设计 [J],2.星间光通信中的瞄准、捕获和跟踪 [J], 刘智;卢益民;罗萌3.卫星光通信精确跟踪控制系统的参数化综合优化设计 [J], 段广仁; 王建宇; 赵天一; 张亮4.移动自由空间光通信的捕获、跟踪和瞄准装置综述 [J], YagizKaymak;Roberto Rojas ·Cessa;禹化龙(译);潘静岩(审校)5.基于中间节点预测的卫星光通信精确跟踪控制系统设计 [J], 张豪;冯娜娜因版权原因,仅展示原文概要,查看原文内容请购买。
空间光通信精跟踪系统的模糊自抗扰控制
( 1 . S c h o o l o f Ae r o s p a c e ,Ha r b i n I n s t i t u t e o f T e c h n o l o g y,Ha r b i n 1 5 0 0 0 1 , C h i n a ;
2 . Na t i o n a l Ke y L a b o r a t o r y o f T u n a b l e L
第 5 期
光 学 精 密工 程
Op t i c s a nd Pr e c i s i on Eng i n e e r i n g
控制系统的模糊神经网络混沌滑模控制方法

控制系统的模糊神经网络混沌滑模控制方法控制系统的模糊神经网络混沌滑模控制方法是一种应用于复杂系统控制中的先进方法。
本文将从控制系统的基本原理、模糊神经网络、混沌滑模控制等方面进行论述,分析该方法在控制系统中的应用及优势。
一、控制系统的基本原理控制系统是指通过对系统内部及外部的各种控制因素进行调节和控制,以使系统状态达到预定的目标状态的一种技术方法。
控制系统主要由传感器、执行器和控制器组成。
传感器用于对系统的各种状态量进行测量,执行器用于通过执行力或输出信号对系统进行控制,而控制器则是通过比较测量值和目标值,并根据调节规则进行控制策略的决策。
二、模糊神经网络模糊神经网络是一种模拟人脑神经元工作原理的计算模型。
它具有模糊推理和学习能力,能够对复杂、不确定、模糊的问题进行处理和决策。
模糊神经网络由输入层、隐含层和输出层组成,通过训练学习得到网络的权值和阈值,从而实现对输入数据的模糊推理和处理。
三、混沌滑模控制混沌滑模控制是基于滑模控制理论和混沌控制理论的一种控制方法。
滑模控制是一种对系统进行非线性控制的方法,通过引入一个滑动模式面,使得系统在该面上运动,从而实现对系统状态的控制。
混沌控制是指通过对混沌系统的控制变量进行调节,使混沌系统的状态从混沌状态转化为稳定状态。
混沌滑模控制通过引入滑模控制和混沌控制的方法,对控制系统进行精确的控制,提高系统的控制品质。
四、控制系统的模糊神经网络混沌滑模控制方法基于以上的控制原理和理论,控制系统的模糊神经网络混沌滑模控制方法可以分为以下几个步骤:1. 系统建模和状态观测:首先对控制系统进行建模,确定系统的状态变量,并利用传感器对系统状态进行实时观测。
2. 模糊神经网络设计和训练:根据系统的控制需求,设计相应的模糊神经网络结构,并通过训练学习得到网络的权值和阈值。
3. 滑模控制面设计:根据系统的状态变量和目标状态,确定滑模控制面的设计方法和参数,使系统在该面上能够实现控制目标。
卫星姿态的间接自适应模糊鲁棒控制
卫星姿态的间接自适应模糊鲁棒控制
张伟;管萍;刘小河
【期刊名称】《北京信息科技大学学报(自然科学版)》
【年(卷),期】2011(026)001
【摘要】针对在太空强干扰环境下工作的三轴稳定卫星姿态控制问题,将间接自适应模糊鲁棒控制应用于卫星的姿态稳定控制中,给出了实现方法.用自适应模糊控制器逼近被控对象的数学模型,并在控制量中加入鲁棒控制项用于抑制扰动,使系统具有更强的鲁棒性.针对挠性卫星设计了间接自适应模糊鲁棒控制器,推导了参数自适应律.仿真结果表明,该方法能够有效抑制扰动,且具有较好的动态与静态品质.【总页数】7页(P66-72)
【作者】张伟;管萍;刘小河
【作者单位】北京信息科技大学,自动化学院,北京,100192;北京信息科技大学,自动化学院,北京,100192;北京信息科技大学,自动化学院,北京,100192
【正文语种】中文
【中图分类】V448.22+2
【相关文献】
1.电弧炉的间接自适应模糊鲁棒控制 [J], 张向军;管萍;刘小河
2.基于自适应模糊滑模的卫星姿态控制方法 [J], 张大伟;程卫强
3.卫星姿态直接自适应模糊预测控制 [J], 孙光;霍伟
4.基于干扰估计的直流电动机间接自适应鲁棒控制 [J], 徐张宝;马大为;姚建勇;董
振乐;杨贵超
5.一类非线性MIMO系统的间接自适应模糊鲁棒控制 [J], 刘国荣;万百五
因版权原因,仅展示原文概要,查看原文内容请购买。
基于模糊RBF神经网络的无刷直流电机控制
基于模糊RBF神经网络的无刷直流电机控制
王晓远;傅涛
【期刊名称】《微电机》
【年(卷),期】2015(048)011
【摘要】无刷直流电机以其高功率密度、高可靠性等优点而广泛应用于各种场合.电机驱动器对控制性能有很大的影响,驱动器采用常规的PID算法难以获得满意的控制效果.为了获得良好的控制性能,本文提出了模糊算法与径向基函数(Radial Basis Function,RBF)神经网络相结合的控制策略.设计了一个四层的神经网络,调整模糊逻辑控制器的输入和输出参数,以参考速度与反馈速度的偏差作为控制的输入,参考电流值作为控制的输出,使得控制系统具备自适应能力.通过仿真和实验对常规PID控制和模糊RBF神经网络算法分别进行了比较,结果表明所提出的方法具有更好的静态和动态响应性能,具有较强的鲁棒性.
【总页数】5页(P33-36,88)
【作者】王晓远;傅涛
【作者单位】天津大学电气与自动化工程学院,天津300072;天津大学电气与自动化工程学院,天津300072
【正文语种】中文
【中图分类】TM36+1;TP273
【相关文献】
1.基于RBF神经网络在线辨识的永磁无刷直流电机单神经元PID模型参考自适应控制 [J], 夏长亮;李志强;王明超;刘均华
2.基于RBF神经网络的无刷直流电机无位置传感器控制 [J], 夏长亮;文德;范娟;杨晓军
3.基于模糊RBF神经网络的无刷直流电机调速控制 [J], 卿启新;叶汉民;杨晓武;时晓霞
4.基于RBF神经网络优化模糊规则的USV自适应模糊滑模控制 [J], 王仁强; 缪克银; 孙建明
5.基于模糊RBF神经网络PID算法的无刷直流电机控制 [J], 张世维;林莘;张大鹏;韩东鹏;刘洋
因版权原因,仅展示原文概要,查看原文内容请购买。
空间光通信粗瞄系统的扰动估计与补偿
空间光通信粗瞄系统的扰动估计与补偿王岩;崔宁;于志亮【摘要】Affected by the influence of the attitude variation and vibration of the satellite platform in the process of tracking and pointing,free space optical communication terminal will therefore reduce the tracking precision of the system.In order to improve the system's ability for the purpose of resisting disturbance,on the basis of coarse tracking system,the cascade linear active disturbance rejection controller was put forward.The coarse tracking system used direct current brushless torque motor driving two-dimensional turntable as the actuator,and was controlled by the coarse tracking controller.Analysis of the system disturbance is required,for which the tracking differentiator is applied to extract.With azimuth axis of the two-dimensional turntable as the object,the cascade linear active disturbance rejection controller was applied to position loop and speed loop for the sack of active disturbance compensation through linear extended state observer.Therefore,double isolation of internal and external loop disturbance can be achieved,and the tracking precision shall be improved.The experimental analysis,and a comparison with the proportion integral derivation controller were also included.The research results show that there is a 50% decrease of standard deviation referred to the tracking error,when inputting 2 Hz,5 Hz and 8 Hz sinusoidal signals with the same disturbance signal simulation.At the same time,the observer's disturbance compensation effect in the circumstance of linear expansion was verified.Ahigh tracking accuracy is still ensured when active disturbance rejection control is not sensitive to the frequency variation of inputted sinusoidal signal with changing frequency.%粗瞄系统以直流力矩电机驱动二维转台为执行机构,通过粗瞄控制器对其进行控制.对系统受到的扰动进行分析,应用了最速跟踪微分器提取速度信号;以二维转台的方位轴为控制对象,在其位置环、速度环采用级联线性自抗扰控制器,通过线性扩张状态观测器主动补偿扰动,达到内外环双重隔离扰动的目的,提高跟踪精度;之后进行了实验分析.分析结果表明:在加入同样的模拟扰动信号,输入2 Hz,5 Hz和8 Hz的正弦信号时,与比例、微分、积分控制器相比,跟踪误差的标准差约降低50%;验证了线性扩张状态观测器具有扰动补偿效果;在输入不同频率正弦信号时,自抗扰控制器对输入信号频率的变化不敏感,仍能保证较高的跟踪精度.【期刊名称】《国防科技大学学报》【年(卷),期】2017(039)005【总页数】7页(P178-184)【关键词】空间光通信;粗瞄系统;线性自抗扰;扰动补偿【作者】王岩;崔宁;于志亮【作者单位】哈尔滨工业大学航天学院,黑龙江哈尔滨150001;哈尔滨工业大学航天学院,黑龙江哈尔滨150001;哈尔滨工业大学航天学院,黑龙江哈尔滨150001【正文语种】中文【中图分类】TN929.1在空间光通信系统中,国内外普遍采用捕获、瞄准和跟踪(Acquisition, Pointing and Tracking, APT)复合控制技术[1-2]。
基于双模糊控制的异步电动机软起动器
基于双模糊控制的异步电动机软起动器
臧涛
【期刊名称】《四川兵工学报》
【年(卷),期】2011(32)2
【摘要】针对异步电动机是一个非线性、强耦合的被控对象,运用常规的控制策略难以取得满息控制效果的问题,提出了一种基于双模糊控制的中压异步电动机软起动器的设计方法,其主电路采用开关变压器.该控制器根据系统当前的电流误差E、误差变化率EC和功率因数变化量△ψ,通过模糊推理以确保异步电动机软起动具有最优化的动态和稳态性能.在此基础上设计了一个基于开关变压器的中压电动机软起动器,实验表明,此控制策略消除了电机起动过程中电流和转矩的振荡,具有很好的使用价值.
【总页数】3页(P59-60,68)
【作者】臧涛
【作者单位】海军驻九江地区军代室,江西,九江,332007
【正文语种】中文
【中图分类】TM573
【相关文献】
1.基于恒流模糊控制的高压异步电动机软起动器
2.基于模糊理论的异步电动机软起动器
3.基于模糊理论的异步电动机软起动器研究
4.基于单片机的异步电动机软起动器研究
5.基于模糊PID复合控制的异步电动机软起动器的设计
因版权原因,仅展示原文概要,查看原文内容请购买。
基于模糊RBF网络补偿的控制输入受限滑模控制
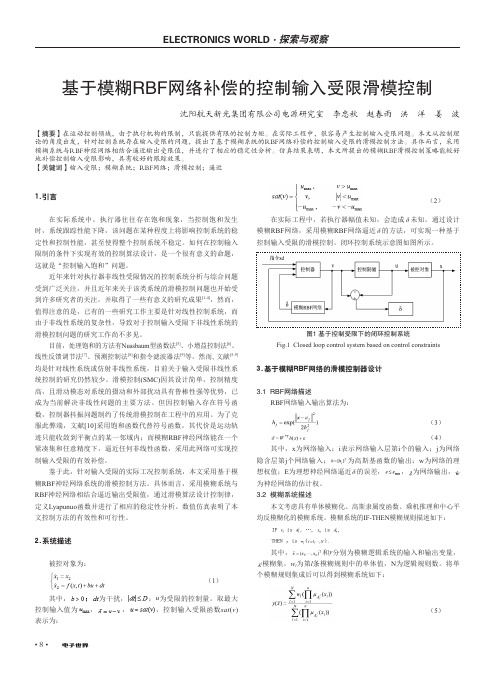
• 8•基于模糊RBF网络补偿的控制输入受限滑模控制沈阳航天新光集团有限公司电源研究室 李忠秋 赵春雨 洪 洋 姜 波【摘要】在运动控制领域,由于执行机构的限制,只能提供有限的控制力矩。
在实际工程中,很容易产生控制输入受限问题。
本文从控制理论的角度出发,针对控制系统存在输入受限的问题,提出了基于模糊系统的RBF网络补偿的控制输入受限的滑模控制方法。
具体而言,采用模糊系统与RBF神经网络相结合逼近输出受限值,并进行了相应的稳定性分析。
仿真结果表明,本文所提出的模糊RBF滑模控制策略能较好地补偿控制输入受限影响,具有较好的跟踪效果。
【关键词】输入受限;模糊系统;RBF网络;滑模控制;逼近1.引言在实际系统中,执行器往往存在饱和现象,当控制饱和发生时,系统跟踪性能下降,该问题在某种程度上将影响控制系统的稳定性和控制性能,甚至使得整个控制系统不稳定。
如何在控制输入限制的条件下实现有效的控制算法设计,是一个很有意义的命题,这就是“控制输入饱和”问题。
近年来针对执行器非线性受限情况的控制系统分析与综合问题受到广泛关注,并且近年来关于该类系统的滑模控制问题也开始受到许多研究者的关注,并取得了一些有意义的研究成果[1-4],然而,值得注意的是,已有的一些研究工作主要是针对线性控制系统,而由于非线性系统的复杂性,导致对于控制输入受限下非线性系统的滑模控制问题的研究工作尚不多见。
目前,处理饱和的方法有Nussbaum 型函数法[5]、小增益控制法[6]、线性反馈调节法[7]、预测控制法[8]和指令滤波器法[9]等。
然而, 文献[5-9]均是针对线性系统或仿射非线性系统,目前关于输入受限非线性系统控制的研究仍然较少。
滑模控制(SMC)因其设计简单,控制精度高,且滑动模态对系统的摄动和外部扰动具有鲁棒性强等优势,已成为当前解决非线性问题的主要方法。
但因控制输入存在符号函数,控制器抖振问题制约了传统滑模控制在工程中的应用。
一种基于双复合滑模面滑模观测器的异步电机转子电阻辨识方案
一种基于双复合滑模面滑模观测器的异步电机转子电阻辨识方案杨淑英;孙瑞;曹朋朋;张兴【摘要】设计了一个双复合滑模面滑模观测器在线辨识异步电机转子电阻,用于提高异步电机间接磁场定向矢量控制性能.尽管观测器是在静止坐标系下实现的,但其推理和设计过程是在转子磁场定向同步旋转坐标系下完成的.这种处理方法,使得静止坐标系下复合滑模面的本质得以清晰揭示,使得单个复合滑模面滑模观测器的不足得以暴露,使得双复合滑模面滑模观测器的提出得以自然呈现,从而完善了复合滑模面滑模观测器设计的理论基础.相关仿真和实验结果验证了该文的推理,展示了该文设计的双复合滑模面滑模观测器的收敛性、观测精度、参数鲁棒性以及动态性能.【期刊名称】《电工技术学报》【年(卷),期】2018(033)015【总页数】11页(P3596-3606)【关键词】双复合滑模面;滑模观测器;在线参数辨识;间接磁场定向【作者】杨淑英;孙瑞;曹朋朋;张兴【作者单位】合肥工业大学电气与自动化工程学院合肥 230009;合肥工业大学电气与自动化工程学院合肥 230009;合肥工业大学电气与自动化工程学院合肥230009;合肥工业大学电气与自动化工程学院合肥 230009【正文语种】中文【中图分类】TM343异步电机是一个多变量、非线性、强耦合的高阶系统。
磁场定向矢量控制技术将其解耦成转矩和磁链两个子系统,进而使其获得与直流电机调速相媲美的调速性能[1]。
间接磁场定向控制(Indirect Field Oriented Control, IFOC)因其简单、易实现以及良好的稳定性得到了广泛的应用[1-3]。
在IFOC中,转差频率的计算需要转子时间常数,间接磁场定向的准确性对转子时间常数有着较强的依赖性。
转子时间常数出现任何偏差都将导致磁场定向出现偏差,进而影响到电机控制的动、稳态性能[4,5]。
转子时间常数为转子电感和电阻的比值,转子电感参数受电机磁饱和的影响[6],而转子电阻受电机温度、趋肤效应的影响[7]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( S c h o o l o f As t r o n a u t i c s ,Ha r b i n I n s t i t u t e o f Te c h n o l o g y ,Ha r b i n 1 5 0 0 0 6 ,C h i n a )
制 电机一 旦 发 生 致 命 故 障 ,整 个 通 信 终 端 就 将 毁
掉 。无刷 直流 电机 故 障易发 部位 主要 位 于驱 动控制
卫 星 光 通 信 粗 瞄 系 统 双 绕 组 电 机 模 糊 滑 模 控 制
陈兴林 ,崔 宁, 王 岩
( 哈 尔滨X - _ , k大学 航天 学院,哈 尔滨 1 l 5 0 0 0 6 )
摘 要 :为了提高卫星光通信粗瞄控制电机的可靠性 , 应用了双绕组无刷直流电机;再利用 S t r i b e c k 摩擦模
第 4卷第 1 期
2 0 1 3 年 2 月
黑
龙
江
大 学
工
程
学
报
V0 1 . 4 。 NO . 1 F e b ., 2 0 1 3
J o u r n a l o f En g i n e e r i n g o f He i l o n g j i a n g Un i v e r s i t y
Ab s t r a c t : To r a i s e t h e r e l i a b i l i t y o f e l e c t r i c mo t o r s i n c o a r s e p o i n t i n g s y s t e m o f i n t e r — s a t e l l i t e o p t i c a l
型 ,分析 了粗 瞄系统 的摩擦干扰 ;在此基础上 ,设 计 了模糊 滑模 控制器 来消 除摩擦力 矩 的扰 动 。最后 通过仿 真 实验 ,验证 了该控制策 略的有效性 ,可 以保证 粗瞄系统 的动态响应及精度要求 。
关键词 :卫星光通信 ;双绕组电机; 模糊滑模;摩 9 . 1
c oa r s e p o i nt i ng s ys t e m.
Ke y wo r d s :o p t i c a l c o mm u n i c a t i o n;e l e c t r i c mo t o r wi t h d u a l wi n d i n g s ;f u z z y s l i d i n g mo d e ;f r i c t i o n i n t e r —
f e r e n c e
的关 键 技术 ,而 粗 瞄 系统 正 是完 成 P AT任 务 的核
0 引 言
卫 星光通 信 作为新 兴 的通信 手段 ,以激光作 为 载波 传递 信息 ,能够满 足 大容量 、高 速率 的数 据传
心 部分 [ 1 ] 。伺 服控 制 电机是 粗 瞄系统 的执行 机 构 , 它 的可靠性 对 整个卫 星 激光 通信 终端极 其 重要 ,控
c o n t r o l l e r i s d e s i g n e d t o e r a s e t h e d i s t u r b a n c e o f f r i c t i o n t o r q u e . Fi n a l l y,s i mu l a t i o n r e s u l t s s h o w t h a t t h e c o n t r o l s t r a t e g y i s f e a s i b l e a n d e f f e c t i v e ,a n d a c h i e v e s f a s t d y n a mi c r e s p o n s e a n d h i g h p r e c i s i o n o f t h e
c o m mu n i c a t i o n,a b r u s h l e s s e l e c t r i c mo t o r wi t h d u a l wi n d i n g s i s e mp l o y e d . Th e f r i c t i o n i n t e r f e r e n c e o f c o a r s e p o i n t i n g s y s t e m i s a n a l y z e d b y u s i n g t h e s t r i b e c k mo d e 1 . On t h i s b a s i s a f u z z y s l i d i n g mo d e
文献标 志码 :A
文章编 号 :2 0 9 5 — 0 0 8 X ( 2 0 1 3 ) 0 1 — 0 1 0 2 ~ 0 6
Fu z z y s l i d i n g mo d e c o n t r o l o f e l e c t r i c mo t o r wi t h d u a l wi n d i n g s i n c o a r s e p o i n t i ng s y s t e m o f i n t e r - s a t e l l i t e o pt i c a l c o mmu ni c a t i o n