高精度准直器的设计及测量
标准单光纤准直器-测试

图 解
准直器 1
耦合器
准直器 2
功率计
图解 1
编制:
审核:
批准:
生效日期:
标准单光纤准直器-测试
材料: 1. 未套管的准直器 设备和工具:
1.激光光源 3.熔接机 5.调整架 7.胶带架 2.功率计 4.切刀 6.十字改锥 8.耦合器
文件号: 版本号:
供应品:
1. 棉签和无尘纸 2. 酒精 3. 单面胶带
程 序
准直器测试 1. 将任意两个未套管的准直器放在调整架上, 按图解 1 光路接线; 调节调节架, 将 IL 调到最小;如满足要求,则将 RL 端放入功率计,绕光源线和准直器 2 线分别读取系统值和器件值,查《回波损耗测试对照表》 ,并在《流程单》 上记录测试值。 2. 将准直器 2 接光源,将 RL 端放入功率计,绕光源线和准直器 1 线分别读取 系统值和器件值,查《回波损耗测试对照表》 ,并在《流程单》上记录准直 器 2 的测试值。 RL 端 激光光源
精密测量准直
测小角法
A
α
DAi度: (主要误差来源之一是照准误差) ①采用放大倍率不小于40倍的J1型以 上的精密经纬仪; ②采用白色(或黄色)底面、黑色对称 标志的觇牌,照准标志的对称轴应铅 垂,具备整平和照明装置;
测小角法作业程序与要求
①在基准线两端点分别安置仪器和觇牌,待测点 安置觇牌; ②用仪器分别照准两个觇牌,测微器读取角值, 计算小角,完成上半测回; ③变换测微器位置,再用测微器分别读取两个觇 牌对应的读数,计算小角,完成一个测回; ④完成往测测回数的一半以后,将仪器和觇牌的 强制对中轴旋转180°,再进行往测另半数测回的 观测,完成往测; ⑤将基线端点上的仪器和觇牌对调,按同样方法 完成返测;
引张线法
利用一根拉紧的不绣钢丝(或尼龙丝)建立的基 准线(面)来测定点的偏离值的方法,可以不受大 气折光的影响。
引张线法
a.安置引张线,稳定后,依次在每一个待测点上安置 显微镜观测作为往测,每个测点读数四次; b.重新安置引张线,并把引张线纵向移动一段距离, 逆序依次在每一个待测点上安置显微镜观测作为返测, 同样每个测点读数四次。完成一个测回; c.测回间拨动浮船装置,使引张线浮动,静止后进 行下一测回观测。测回间互差应小于0.2mm。
准直测量
在一些高精度要求的机械设备安装中,在大坝、 防洪大堤以及其他构筑物的变形测量中,需要观 测基本位于同一视线上许多点的偏移量,在多种 方法中,准直测量是其中操作方便、精度较高的 一种方法。
基准面 基准线
准直测量
准直测量
准直测量的精度等级
精密准直测量以偏离中误差作为精度指标,分 为一、二、三、四级:
LC
SC BC L
波带板激光准直改进形式
为避免波带激光准直中对光源过高稳定性的要求, 波带板激光准直宜布置成如下图的形式。
高精度二维自准直仪的研制
当光源 4发 出 的光 线 照 明物镜 2 平 面上分划 板 3 焦 的 目标 0 时 , 如果 0 点 在 物镜 2 轴 上 , 么 由它发 出 光 那
的 光线 通 过 物镜 后 , 一 束 与 光 轴 平行 的平 行 光 束 射 成
向反 射镜 1 。当反射 镜 面 垂直 于光 轴 时 , 线 仍按 原路 光
电探测 器 用 于 自准直 仪 的探 索 性 研 究工 作 , 取 得 了 并 很多成 果 。仪 器 的分辨 力 、 角精 度 以及在动态 测 量方 测 面都有 了不 同程度 的进 展 。 随着 C D 技 术 的成熟 运用 , C D技 术引 入 自准 C 将 C 直仪 已成为 可能 。据所 能 查阅 到的资 料 , 向市场 的光 推 电 自准直仪 中 , 国M0L E 德 L R公 司生 产的 E C L OMAT H 和E C R L OMAT 3 0 0 0均 采 用 高 分 辨 力 的线 阵 C D C
R e e r h o H i c a y Tw o a i t c li a o s a c fA gh Ac ur c — x s Au o o lm t r
ZO U i - J u gui ,G A N u h g,J u — ng J n— on I G o di
器 件 的稳定性 打下 了基 础 。
等) 的检测 ; 可用 于 平直 度 ( 也 如平 板平 面度 、 轨 直线 导 度 、 件平 行 度 和 垂 直 度 等 ) 工 的检 测 , 可用 于精 密转 还 台等惯 导测试 设 备 的检测 。 传统 自准 直 仪测 量 准确 度 和测 量范 围受许 多 因 素
( 3 4I si t f S J i n 3 0 0 C ia 6 5 n t u eo t CS C, i i g 3 2 0 , h n ) ua Ab t a t: s r c A h gh c u a y w o a s ut c l i a o i i t o c d n hi p p r, w hi h s s he i a c r c t — xi a o o l m t r s n r du e i t s a e c u e t s r a e a r y CCD c m p e t a p t e e t i y s ns , a d t u fc ra o on n s s ho o l c r c e or n wo— xi a l by t t e r o a s ng e he h o y f a o o lm a e a e m e s r d. T h e s i c p s ± 3 0 ,a d t c u a y i ± 0 ” ut c li t r a u e e m a ur ng s o e i 0 n he a c r c s .2 .
高精度二维自准直仪的研制

对 力标准机进行控制, 往往要对多达 30 路以上的 开关量信息进行监测, 并对 10 个以上的执行机构进行 开关控制。采用ST D 工业总线结构, 使得该静重式测力
( 上接第 20 页) 表 1 与穆勒 ELCOM AT 3000 比较结果 ( ″)
ELCO M A T 3000 显 示 本样机显示
( 6354 Inst it ut e of CS SC, Jiuj iang 332000, China)
Abstract: A hig h accur acy t wo -ax is aut ocollimat or is int roduced in this paper , w hich uses t he surf ace array CCD co mpo nents as phot oelect ricy sensor , and t w o-ax is angle by t he t heory of aut ocollimat e are m easur ed. T he measuring scope is ±300″, and the accuracy is ±0. 2″.
1 自准直原理
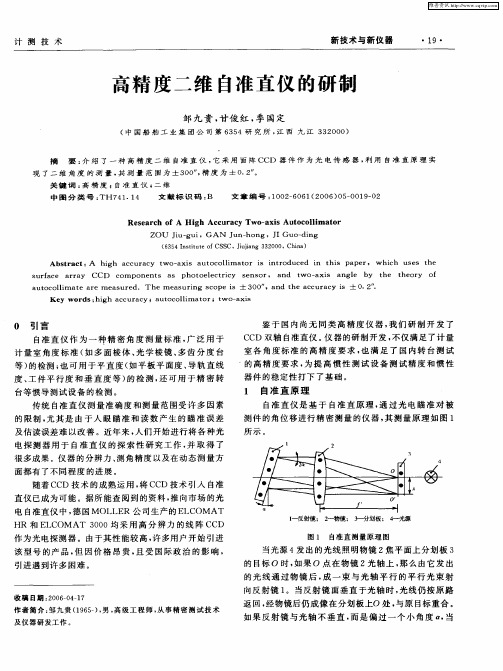
自准直仪是基于自准直原理, 通过光电瞄准对被 测件的角位移进行精密测量的仪器, 其测量原理如图 1 所示。
图 1 自准直测量原理图
当光源 4 发出的光线照明物镜 2 焦平面上分划板 3 的目标 O 时, 如果 O 点在物镜 2 光轴上, 那么由它发出 的光线通过物镜后, 成一束与光轴平行的平行光束射 向反射镜 1。当反射镜面垂直于光轴时, 光线仍按原路 返回, 经物镜后仍成像在分划板上O 处, 与原目标重合。 如果反射镜与光轴不垂直, 而是偏过一个小角度 , 当
高精度光电自准直测角系统的设计和验证

的示值显示到 0″、100″、200″、300″附近,用挡光板挡
一下光束,当读数稳定 后 记 录 数 据。重 复 测 量 10
次,用贝塞尔公式计算实验室标准偏差,具体数据如
表 1和表 2所示。
表 1 X轴测量重复性试验数据
(单位:″)
序号
0″ 附″
300″
附近读数 附近读数
X=f·tan2α
(1)
式中:X—光学标识物偏离光学中心的位移量;
f—光学系统的焦距;
α—期望获得的角度。
11 测量系统的关键技术
事实上光学目标随温度和时间的推移将相对光
作者简介:郭郑来,男,高级工程师(副高),主要从事几何量精密机械检测。
郭郑来:高精度光电自准直测角系统的设计和验证
11
学中心产生缓慢的漂移。低发热的冷光源部分解决 了仪器中的光源发热的问题,但随着大规模集成电 路的采用,高敏感的接收部分产生的热量成为影响 量值漂移的 主 要 热 源:(1)本 设 计 将 光 敏 元 件 及 其 处理电路封装在一片陶瓷基片上,然后将陶瓷片与 整个仪器的金属基础件固紧,依靠陶瓷的优良导热 性能使得光敏元件的温度漂移造成的量值漂移大大 降低;(2)设计中采用图形编码技术(而非十字丝分 划板编码技术),如图 1所示,将图形码直接投影到 分划板上成为 CCD相机识别的目标,此新颖的方法 使得角度测量精度只取决于 CCD器件本身的精度, 同时光学系统聚焦性能的状况得也到改善,降低了 光学系统象差的影响;(3)采用物镜焦距为 550mm 的光管,光管内无反射棱镜设计,降低光源多次反射 造成的内部干扰,提高系统信噪比;(4)准直光源的 好坏直接影响了成像质量,进而影响了设备的通用 性及测试精度,[1]由于不同的反射率而造成了 CCD 采集到的信号强弱的差异,将会造成很大的测量误 差。[2]本方案 采 用 手 动 调 节 光 源 方 案,通 过 调 节 光 源强度,让光斑图像像素在 12000~16000之间,如 图 1所示,大大提高了测量精度。
高精度测量仪器的设计与制造

高精度测量仪器的设计与制造摘要:高精度测量仪器在现代工业领域中发挥着关键的作用,为确保产品质量和生产过程的稳定性提供了支持。
本文将介绍高精度测量仪器的设计与制造的关键步骤和技术要点。
首先,我们将讨论高精度测量仪器的设计原则和要求。
然后,我们将重点介绍高精度传感器的选型和优化。
最后,我们将讨论仪器的加工、装配和调试方法,以确保测量精度的可靠性和稳定性。
1. 引言高精度测量仪器在多个领域中具有重要的应用,如制造业、科学研究和医疗领域等。
设计和制造高精度测量仪器的过程需要综合考虑多方面的因素,并采用一系列的工艺和技术来提高测量精度和可靠性。
2. 高精度测量仪器的设计原则和要求在设计高精度测量仪器时,需要考虑以下原则和要求:2.1 测量范围和精度要求:根据测量对象的特性和应用需求确定测量范围和精度要求,确保测量仪器的性能能够满足实际应用的需求。
2.2 传感器选型:选择合适的传感器类型和品牌,根据测量对象的特性和应用要求进行优化。
2.3 信号处理和数据采集:设计合理的信号处理和数据采集电路,提高信号质量和准确性,减少干扰和噪声。
2.4 稳定性和可靠性:在设计中考虑仪器的长期稳定性和可靠性,采用合适的材料和工艺,确保仪器能够在多种环境条件下正常工作。
3. 高精度传感器的选型和优化在高精度测量仪器的设计中,传感器起着至关重要的作用。
传感器的选型和优化需要考虑以下因素:3.1 精度和分辨率:选择具有高精度和分辨率的传感器,以满足测量需求。
3.2 线性度和重复性:传感器的线性度和重复性对于测量结果的准确性和稳定性至关重要。
3.3 温度补偿:考虑传感器在不同温度环境下的性能变化,设计合理的温度补偿技术。
3.4 抗干扰能力:提高传感器的抗干扰能力,减少外界干扰因素对测量结果的影响。
4. 仪器的加工、装配和调试方法在高精度测量仪器的制造过程中,加工、装配和调试方法对于测量精度的可靠性和稳定性起着重要的作用。
4.1 加工:采用精密加工工艺,保证零部件的尺寸和形状的精度,降低装配误差。
新型三件套准直器的设计及优势
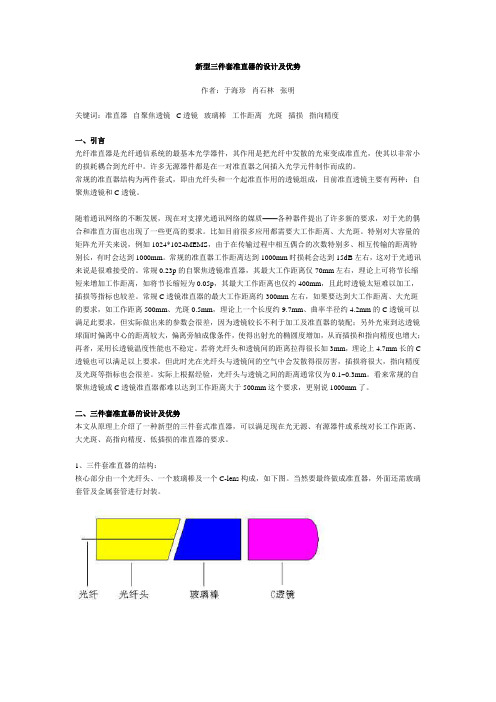
新型三件套准直器的设计及优势作者:于海珍肖石林张明关键词:准直器自聚焦透镜C透镜玻璃棒工作距离光斑插损指向精度一、引言光纤准直器是光纤通信系统的最基本光学器件,其作用是把光纤中发散的光束变成准直光,使其以非常小的损耗耦合到光纤中。
许多无源器件都是在一对准直器之间插入光学元件制作而成的。
常规的准直器结构为两件套式,即由光纤头和一个起准直作用的透镜组成,目前准直透镜主要有两种:自聚焦透镜和C透镜。
随着通讯网络的不断发展,现在对支撑光通讯网络的媒质——各种器件提出了许多新的要求,对于光的偶合和准直方面也出现了一些更高的要求。
比如目前很多应用都需要大工作距离、大光斑。
特别对大容量的矩阵光开关来说,例如1024*1024MEMS,由于在传输过程中相互偶合的次数特别多、相互传输的距离特别长,有时会达到1000mm。
常规的准直器工作距离达到1000mm时损耗会达到15dB左右,这对于光通讯来说是很难接受的。
常规0.23p的自聚焦透镜准直器,其最大工作距离仅70mm左右,理论上可将节长缩短来增加工作距离,如将节长缩短为0.05p,其最大工作距离也仅约400mm,且此时透镜太短难以加工,插损等指标也较差。
常规C透镜准直器的最大工作距离约300mm左右,如果要达到大工作距离、大光斑的要求,如工作距离500mm、光斑0.5mm,理论上一个长度约9.7mm、曲率半径约4.2mm的C透镜可以满足此要求,但实际做出来的参数会很差,因为透镜较长不利于加工及准直器的装配;另外光束到达透镜球面时偏离中心的距离较大,偏离旁轴成像条件,使得出射光的椭圆度增加,从而插损和指向精度也增大;再者,采用长透镜温度性能也不稳定。
若将光纤头和透镜间的距离拉得很长如3mm,理论上4.7mm长的C 透镜也可以满足以上要求,但此时光在光纤头与透镜间的空气中会发散得很厉害,插损将很大,指向精度及光斑等指标也会很差。
实际上根据经验,光纤头与透镜之间的距离通常仅为0.1~0.3mm。
一种高精度光机同轴准直器的制作方法

一种高精度光机同轴准直器的制作方法1.高精度光机同轴准直器是一种用于将入射光线准直并与光机中心轴对准的装置。
2.准直器的制作材料主要包括光学玻璃、金属材料和精密光学零件。
3.选择合适的光学玻璃作为准直器的主体材料。
光学玻璃应具有高质量的光学特性,如低色散率和高透过率。
4.将选定的光学玻璃切割成适当尺寸的块状。
在切割过程中要注意保持边缘的平整度和光滑度。
5.使用精密磨床对切割好的光学玻璃进行粗加工,使其表面光滑且平行度较高。
6.将已粗加工好的光学玻璃片放置在精密平面平台上,并使用研磨液进行超精密研磨,以进一步提高其平行度。
7.在研磨过程中,要不断检查光学玻璃片的平行度、表面光洁度以及厚度均匀性,以确保制作出的准直器达到高精度要求。
8.完成研磨后,使用超洁净室中的蒸发法将多层膜镀上玻璃表面,以实现抗反射和反射率的调控。
9.将金属材料加工成准直器的支架和固定部件。
金属材料应具有足够的强度和刚度,以确保准直器的稳定性和精度。
10.通过数控机床等精度加工设备进行加工,保证金属零件的尺寸精度和表面质量。
11.根据准直器的设计要求,将金属零件与光学玻璃组装。
组装过程中要注意保持精密定位和稳定性,以确保准直器的性能和精度。
12.在组装过程中,使用精密测量工具对准直器的关键尺寸进行检测和调整,以达到高精度要求。
13.完成组装后,对准直器进行全面的测试和调试。
测试内容包括入射光线准直度、反射率、透过率等光学性能的测量。
14.如果准直器的性能不满足要求,需要根据测试结果进行相应的调整和优化。
15.在测试完成后,对准直器的金属零件进行防腐处理和表面处理,以提高其使用寿命和美观度。
16.对准直器进行严格的质量控制和检验,确保产品符合相关标准和要求。
17.分别对准直器的光学部分和机械部分进行性能测试,并记录测试结果。
18.准备详细的制作过程记录和相关文件,包括准直器的设计图纸、制作工艺流程、材料清单和相关测试报告等。
19.根据客户需求,对准直器进行个性化定制,如增加附件接口、调整尺寸等。
4.4-准直测量

系统包括三个部分:尼龙丝、带有探测器的尺子及控制装置。 步骤:1、在两个基准点之间拉紧尼龙丝形成一条基准线; 2、把带有探测器的尺子建立一条过基准点中心且垂直于尼龙丝的垂线。 探测装置由逻辑线路、滤波器、前置放大器、功率放大器以及伺服回路等组成,探测器在精密螺丝杆上移动的距离(即偏距)可由计算起显示出来。
感谢阅读
感谢阅读
感谢阅读
2、激光准直测量
一、激光准直仪 激光准直仪是利用激光具有能量高、方向性好等特点,提供了一条直线性极好的可见激光束,以作为测量基准。激光准直仪的测量距离大,测量精度高。
二、光的相干性
2、激光光源:受激辐射
= (E2-E1) / h
完全一样
1、普通光源:自发辐射
·
·
独立(同一原子先后发的光)
例子:在开凿地下隧道工程中,过去用普通光学经纬仪等仪器,在人工照明的条件下,设立标桩,建立基准线。这种方法一方面需要不断停工,影像掘进速度;另一方面在照明不足、粉尘浓度大的情况下,测程短,需要测得次数多,质量也不容易得到保证、而在地铁、隧道工程中,应用激光准直测量,激光束可达300m远,并且亮度大,看的清楚,也便于用光电检测自动控制调整掘进方向。
二、波带板激光准直测量 激光束经菲涅耳波带板后能干涉成像,且光点、波带板中心和像点在一直线上。应用这个性质进行准直测量,称为激光波带板准直测量。 组成:激光器 波带板 激光探测器
测量方法: (1)在一个基准点A安置激光器 (2)在另一基准点B安置探测器 (3)在待测点i安置一特定焦距的波带板。当激光照满波带板时,在B点激光探测器上可测得 ,从而可计算出i点的偏距。
在大型建筑施工中,经常有大面积饰面板安装工程,如,大理石贴面、地板安装等。在这种情况下,利用激光束做基础,可以提高精度。 毛主席纪念堂柱廊有44根柱子,每边12跟,用大块的经过刨床加工过的花岗石作饰面,为了使12跟廊外饰面共在一个铅垂面上,采用了激光准直仪为最下面的两列石板准直。在施工中,先使仪器发出的激光束与柱列中心线平行,再以激光束作为检查每根柱上花岗石板共铅垂面的基准,可保证各石板共铅垂面,精度可达到毫米量级。
高精度多功能激光准直仪的研制

第36卷,增刊红外与激光工程2007年9月V bl.36Su ppl e m e n t I nf}a r ed a nd Las er Engi nee曲g Sep.2()07高精度多功能激光准直仪的研制李田泽1,谭博学1,马立修1,卢恒炜1,袁江2(1.山东理工大学电气与电子工程学院,山东淄博255049;2.南通大学机械工程学院,江苏南通226007)摘要:阐述了光电位置敏感器件(Ps D)的结构、特点、工作原理及其非线性,提出采用电桥理论分析P SD非线性误差的新方法。
在此基础上,采用高精度低温漂高输入阻抗前置放大器、加法器、减法器、除法器等电子元器件,对改进型的2D.PsD的信号调理电路进行了设计与调试;使用连续发射的激光光源、分光器,滤光器等光学元器件,设计了一种消除光束漂移的光学系统。
通过对数据采集系统的研究、设计,研制开发出直线度的测评软件与研制的高精度多功能激光准直仪相结合,对直线度进行了实时测试与分析,并给出了实验测试结果及其仪器进一步改进的方法,最后对仪器的应用前景作了展望。
关键词:激光准直仪;横向光电效应;非线性分析;电桥理论中圈分类号:TN l5文献标识码:A文章编号:1007—2276(2007)增(探测与制导)一0508.05M锄uf act ur e of hi咖一pr eci si on m ul t i-f unct i on I as er coI H m at orU面a11.zel,7r A N B o.xue l,M A Li—xi ul,L,U H en g—w ei l,Y U A NJ i a n92(1.S c ho ol o f E1ec啦e al l dEl ect rc戚cEngi neeri ng,ShandongU ni versi t yof嗽hnol ogy’zi bo255049,C t面霹2.Sch∞I o f M cch姐i caI Engin∞f i n g,N柚t∞g U ni ve巧i吼N锄t ong226007,(=ll i衄)A bs t r戢t:Expound也e s t r uct ur e,ch ar act er'w or k pri nci pl e aI l d non-l i ne ad哆0f PSD(Pos i t i onse nsi t i V e det ect or).A new ki nd of m et t l od w t l i ch i s bri dge吐l e ory i s put f or w ar d t o aI l al y ze tl l e nonl i neari t)rer r o r of P SD.B ase d on m at,use s o I n e el ect r i c com ponen t s,f or exam pl e t he t I i gh—pr eci si on l ow—t em per at ure 硒ft hi g h i nput i m pe dance pre posi t i V e am phf i er'sum m at of'sub跳c钯r’出V i der et c,t o des i gn and deb ug t he s i gna l pr o ces s i ng ci rcu“of i m pm V ed P SD;ut m ze s om e opt i ca l com ponen t s,f or exa玎叩l e t he con t i nuo us er nj ss i on l a se r sour ce,be锄spl it t er,f il t er et c,t o desi gn a hnd of opt i ca I s ys t em t o aV o i d be锄越f t.T hr ough r esea r cm ng aI l d desi gni ng t he dat a a cqui si t i on s ys t em,a st r a i ght nes s t:est s o f t w are is deV el oped t0 com bi ne w i t h t he hi gh—pr ec i s i on m ul石一f unct i on l a se r col l i m a幻r.In m i s soR w ar e t11est r a i ght nes s i s t e st e dand aI l a l yze d on r eal—t i m e,m en nl e exper i m ent r e sul t s and s om e a dva Il ce f net hod of m e P SD are舀ven,i nm e eI l dⅡ1i s i nst nl m ent’s a ppl i ca t i on pr o s pect s i s f or ecast.K ey w or凼:L aser col l i m at or;Tet ra l ater al;N ol l l i neaIi哆龃al yzi ng;B dd ge m e or y收奠日期l2007—0r7-3l薹盒疆目:山东省教育厅资助项日(J05c5I),山东理工大学基金资助项目(2004日M13)作t■介I李田泽(1963一),男,山东潍坊人,教授,从事光电检测、激光技术研究。
立体定向放射手术治疗系统中准直器系列的设计方案和测试方法

在 目前 医院 的一般 常规放射 治疗 中 ,从 医用直
线加 速器 中放 射 出来 的 x射 线 是 直接 照 射 在人 体 身 上的 ,在 x射 线 杀 死 病 灶 细 胞 的 同 时 ,大 量 的
正 常组织 细胞也会 遭受 x射 线 的伤 害。
立体 定向放 射 手术治疗 系统 刚要求 对从 医用 直 线加速器 中放 射 出来 的 x射 线 进 行 二 次 准 直 ,并 使 x射线在 照射野 和 照射 剂 量 上得 到有 效 的控 制 通过 对 x射 线 的二 次 准 直 ,不 仅 能 够使 x射 线 剂 量能 够精确地 集 中照射 在人体 的病灶 细胞 上 ,而且 在 照射野 上能够 根据 病灶 的大小灵 活控 制 ,从 而能 够避 免伤 害大量 的正常 组织细 胞 。
()设计 一 个表格 ,记 录各 个准直 器在不 同水 5 深 时的剂 量值 ( eY为 单 位 ) 以 G 。在设 置水 深 度 时
源 直径 td :期
维普资讯
裹 1
序 号 小端 d l 大 端 d 2
∞ 0 8 3 耐 6 l ∞ 3 0 2 吕
单 位 :m m
锥 度
1 7’ I l 02  ̄ 7’ 3 0 3 7’ 4 9 0 8 75 ’ “ 05 ’ 2 ” c8 6 18 4 o’ 5 1l ’ 33 O9 l2  ̄9’ 2 ” 2 13 = 9‘ 4 ' 0“ l ‘5 “ 8 0 1” ’ 6 21 o 0’ 3 4” 22 o 0’ 5 ” 2 23 ‘ 9 8  ̄1 ”
维普资讯
立 体 定 向 放 射 手 术 治 疗 系 统 中 准 直 器 系 列 的 设 计 方 案 和 测 试 方 法
陈 纳 新
( 圳奥沃 国际科技发 展有 限公 司 ,深 圳 58 3 ) 深 10 1
一种光纤准直器的制作方法

一种光纤准直器的制作方法
本发明涉及一种光纤准直器的制作方法,该方法包括以下步骤:
1. 制备光纤:选择适合的光纤材料,如石英玻璃等,将其拉制成必要长度的光纤。
2. 切割光纤端面:使用切割机器或者激光切割技术,将光纤端面切割成平整的面。
3. 蒸镀金属膜:将切割好的光纤端面放置于真空蒸镀设备中,进行金属膜蒸镀,以提高准直效果。
4. 定位光纤:将光纤端面放置于定位装置中,以确保其位置准确。
5. 固定光纤:使用适当的胶水或者夹具将光纤端面固定在准直器中。
6. 精细调节准直器:根据需要,通过微调准直器的位置和角度,以获得更好的准直效果。
经过以上步骤,制作出的光纤准直器可用于光纤通信、光电传感等领域,具有准直精度高、稳定性好等优点。
- 1 -。
精密仪器准直精度检测和调整方法研究

精密仪器准直精度检测和调整方法研究精密仪器准直精度检测和调整方法研究摘要:精密仪器的准直精度对于其性能和精确度起着至关重要的作用。
本论文主要研究了精密仪器准直精度的检测和调整方法,通过实验证明了这些方法的有效性和可行性。
首先,介绍了精密仪器准直精度的定义和重要性。
然后,详细介绍了几种常用的准直精度检测方法,包括激光测距、光电对准和角度测量等。
接着,提出了一种基于Gauss-Newton算法的自动调整方法,该方法可以根据检测数据自动调整仪器的准直精度。
最后,通过实验验证了这些方法的可行性和有效性,并探讨了准直精度对于精密仪器性能的影响。
关键词:精密仪器、准直精度、检测方法、调整方法、实验验证第一章引言精密仪器是现代科学研究和工程技术中不可或缺的工具。
精密仪器的性能和精确度直接影响了实验结果和技术输出的质量。
而准直精度是精密仪器的重要性能指标之一,它代表了仪器的视轴和光轴之间的偏差程度。
精密仪器在使用过程中会出现一些误差,而这些误差主要来自于仪器准直精度的不准确。
因此,准直精度的检测和调整对于保证仪器性能和精确度是至关重要的。
准直精度检测的目标是精确测量仪器的准直误差,以分析仪器在实际使用过程中的偏差情况。
然后通过调整仪器的相关参数来减小或消除这些偏差。
检测的结果可以提供给调整过程中的反馈和控制,帮助用户获得更加精确的测量结果。
本论文的目的是研究精密仪器准直精度的检测和调整方法。
首先,介绍了精密仪器准直精度的定义和重要性。
然后,详细介绍了几种常用的准直精度检测方法,包括激光测距、光电对准和角度测量等。
接着,提出了一种基于Gauss-Newton算法的自动调整方法,该方法可以根据检测数据自动调整仪器的准直精度。
最后,通过实验验证了这些方法的可行性和有效性,并探讨了准直精度对于精密仪器性能的影响。
第二章精密仪器准直精度的定义和重要性2.1 准直精度的定义精密仪器准直精度是指仪器光轴与视轴之间的偏离程度。
一种高精度光机同轴准直器的制作方法

一种高精度光机同轴准直器的制作方法篇11.引言:介绍光机同轴准直器的重要性及应用领域。
2.制作方法的概述:简述制作高精度光机同轴准直器的主要步骤。
3.详细制作步骤:3.1 光学元件的选择与加工3.2 机械结构的设计与制作3.3 同轴调整与校准4.制作过程中的注意事项:列出关键的制作细节和可能出现的问题。
5.结论:总结高精度光机同轴准直器的制作方法,强调其精度和可靠性。
正文一种高精度光机同轴准直器的制作方法光机同轴准直器在各种光学系统中具有重要的作用,它主要用于保证光束的直线传播,提高光学系统的性能。
本文将介绍一种高精度光机同轴准直器的制作方法。
1.引言在激光通信、光学测量、光刻等领域,光机同轴准直器都发挥着关键作用。
为了确保光学系统的精度和稳定性,制作高精度光机同轴准直器显得尤为重要。
2.制作方法的概述制作高精度光机同轴准直器主要包括以下步骤:光学元件的选择与加工、机械结构的设计与制作以及同轴调整与校准。
3.详细制作步骤3.1 光学元件的选择与加工选择高质量的光学元件,如透镜和反射镜,是保证准直器性能的基础。
根据需求选用合适的材料,并进行精密磨削和抛光,以获得所需的表面质量和光学性能。
3.2 机械结构的设计与制作设计合理的机械结构,以确保光学元件的稳定安装和调整。
选用热稳定性好、膨胀系数低的材料,以减少环境因素对准直器性能的影响。
3.3 同轴调整与校准通过精确的调整和校准,确保光学元件的同轴度。
采用高精度的测量设备,对准直器的性能进行全面检测,确保达到设计要求。
4.制作过程中的注意事项在制作过程中,需要注意保持清洁,避免灰尘和划痕对光学元件的影响。
同时,合理控制环境温度和湿度,以保证准直器的长期稳定性。
5.结论通过本文介绍的制作方法,可以制作出高精度光机同轴准直器,具有优异的性能和可靠性。
篇21.引言:介绍光机同轴准直器的重要性及应用领域。
2.制作方法的概述:简述制作方法及所需材料和工具。
3.制作步骤详细说明:按步骤解释制作过程的各个环节。
光纤阵列准直器设计及其发散角测量

光纤阵列准直器设计及其发散角测量刘若仙;赵士元;谷一英;谢日凡;赵明山【期刊名称】《光学精密工程》【年(卷),期】2023(31)1【摘要】传统基于单个固定折射率透镜和渐变式折射率透镜制备光纤阵列准直器的方法,存在阵元数扩展困难、封装工艺复杂且集成化困难等缺点。
利用光学微透镜易阵列化且阵元特性一致性好等优点,提出了基于平凸微透镜阵列制备光纤阵列准直器的方法。
根据高斯光学和矩阵光学理论,对光纤阵列准直器的准直特性进行了理论分析和仿真,确定了光纤阵列准直器的相关设计参数,据此加工制备了四阵元一维排布光纤阵列准直器,其阵元间距为250 μm。
通过远场光斑法对光纤阵列准直器的主要性能参数远场发散角进行了测量,并采用蒙特卡洛法对测量不确定度进行了分析与评定。
光纤阵列准直器各通道远场发散角的测量值分别为0.69°,0.67°,0.71°,0.68°,测量扩展不确定度为0.02°,该测量结果在设计容差(0.68±0.03)°之内。
该光纤阵列准直器具有良好的准直特性,能够满足光纤通信系统中光纤阵列准直器小型化和集成化的需求。
【总页数】10页(P89-98)【作者】刘若仙;赵士元;谷一英;谢日凡;赵明山【作者单位】大连理工大学机械工程学院;大连理工大学光电工程与仪器科学学院;辽宁省先进光电子技术重点实验室【正文语种】中文【中图分类】TN929.11【相关文献】1.菲涅尔型阵列光纤准直器的研究2.光纤微透镜用于阵列半导体激光器快轴准直研究3.1 550nm光预准直模块研制与发散角测量的实验4.从辞令论说到赋家用典5.高职机电教学中翻转课堂教学模式的应用因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高精度准直器的设计及测量
作者: 作者单位: 张爱梅, 金永杰, 王娟, 吴枚, 吴伯冰, 张童 张爱梅,王娟,吴枚,吴伯冰,张童(中国科学院高能物理研究所 北京 100049), 金永杰(清华 大学 北京 100084)
引用本文格式:张爱梅.金永杰.王娟.吴枚.吴伯冰.张童 高精度准直器的设计及测量[会议论文] 2009
(20—250 keY)巡天瞄1,发现大批超大质量黑洞和其它高能天体,解析宇宙X射线背景,而
高精度的高能准直器是实现这一目标的最为重要的部件,本文就以高能准直器为研究对象, 进行高精度准直器的设计、加工及测量方法的探索研究。
2.准直器方案设计
2.1方案设计 HXMT卫星主载荷有18个高能准直器,布局如图1所示,考虑准直效果、成像要求和结 构布置等,初步确定HXMT准直器采用高h=300mm,、直径①=188mm的圆筒结构,内部栅格单 元为30minX6mm(栅格中心距),视场为5.7。×1.1。,要求准直器单体栅板间不平行度小于
1.引言
高精度准直器是广泛应用于空间探测和医疗器械等领域的关键设备,美国海军实验室 为防御气象卫星计划而研制的探测大气紫外辐射的紫外临边成像光谱仪SSUL I(special
sensor
ultravioletl imb
imager),就采用了视场为垂直方向0.10、水平方向2.4。的准
直器作为光学准直器件…;准直器还被用于太空探测,作为观测太阳大气的空间太阳望远镜 的光学准直器件(如RXTE的HEXTE,BeppoSAX的PDS);在医学上,它也用于y射线的准直 等等‘引。 硬x射线调制望远镜卫星(HXMT)是我国学者发展的巡天科学卫星,高能望远镜(眦) 是HXMT卫星的主载荷,其主要科学目标是实现世界最高的灵敏度和空间分辨率硬X射线
87
count,s;新方案的
环境本底约为原方案的53 5%。
钽的线衰减系数(30212/锄),是铅的
(27 174/cm)1
11倍,采用覆盖韬台金桶内壁
}I主栅扳的屏敲层为0 15ram厚的钽,准直器单 体的重坩为10 44kg,zl】生比为90 7%。 综合考虑加l’I,艺、重量、准亢敛果}I成 像的要求等.初步确定ILXMT 12星HE准直器 采川薄壁窄扳条状结构的钽准直器,如幽3。
0.18’,栅板间平行度为0.57’,达到了HXMT卫星高能准直器的精度要求。
3.结论
本文以设计实现高精度准直器的为研究目标,以物理目标为基础,反复优化设计并试
制检测,摸索出一套完整可行的高精度机械准直器的加工工艺方案,实现了肛准直器的规 格化样件,并研究出一套切实可行的精度测量方法。经测量HE准直器样件的精度已完全满 足精度要求,达到硬x射线调制望远镜(HxMT)的科学目标需求。
方式,直接电镀或着铜后镀层均无法实现需求的J譬度及其均匀性。
方窠3钽准菏器 川Ta材料为物理功能材料进行试验,采川薄钮片一,埂铝贴台的方式,最后成功试制样 fl。为兼顾r宽视场(5 7。方向)的曝光度,义能提高成像分辨率(I 1。方向的调¥0作¨J)。 采用不对称栅格结构,如图3所示。准直器桶、主栅扳}1法兰盘采"J LYl2CZ锅台金制造。 由丁IXl2CZ锅台金的强度比_i}}域铅.锑合金高得多,】舡消横向主栅扳,仅保留5条纵向土
5
u
m.重复精度1 2
5 u
m.删头压
2009第二十二届全国空问探测学术讨论会论文
检验准直器外形尺寸精度,同时检测到栅板与栅板间的平行度,从而保证准直通道尺 寸的规范性,简捷而易操作。 试制的样件测量结果表明,法兰的两个面的平行度为0.01mm,外圆柱面轴线与法兰断
面的垂直度0.015mm,栅板问平行度0.05ram,即外圆柱面轴线与法兰面得法线最大夹角为
2009第,十■届全『司空川探测学术讨|^会论文
栅板,这样小fn可以减重,fnJ且能I竹加|1.空比【51 利川GEAN]14模拟1 8个准直器单体加整 体屏蔽时的弥散光子环境奉底,得到平均到每 个探测器上的本底计数率为207counts/s:而原 米的准直器单体的计算纠a果是,平均刮每个探 测器上舳本底计数率为3
Tab I
At”m】ati
Orl
eoeffieicnt
of
usuaI matpIinl
s
for
collimtor
n寨名称
蟓r序数 (g/cm3) (cm2/g)
*虚
所#Rm系数
线t}裒艟系数
川LYl2CZ高强度硬钒合金作框架.内部铸造铅一锑台金内桶和土栅板,内表面切0
2mm
宽的槽.插入156片0 15mm厚的钽扳,构成准直器单体,见翻2。上栅扳厚2ram的单体重 啦为19 6kg,将5条土栅板都减薄到j 2mm历单体咀草为16 3kg。此方室的准商器单体经 过机械精度测量、物理成像试验及动力学环境试验,各项指标均达到了任务要求,但其重量 严重考验11吊平台的承受力, 方案2镀铅准直器 钳的机械强应报低,1 2mm厚的内桶剃十栅扳已经是满足加I。要求和力。}环境要求的 极限,我们晓患川密度根低的LYl2CZ’“高强度铝台金仆为准直器的框架.内表面镀以薄钳 构成准直器单体,称其为铝台金框架沉铅插|}li扳的技术方窠。经反复试验铅堙斜台金的迎接
2
e
幽3钽准直器
Fig 3 Ta.collimator
2钽准直器工艺方案 如图4所示为钽准“器的蹬训方案模型,准商
器桔度要求』L体为 l、法兰端面K与Il平行度珀度小丁0 J立小r
2
2、蚓牲面M自『N的轴线与洁’‘端而H币}’L虚角
O 5’
3、Ta栅扳与法兰端面H的乖阿皮角度不人r
l
7,栅板问平行度角度不人r
2
7。
2009第一l
i膳全国空旧J探测学术讨论会沦文
蒌
目I
HXMT
l’£土#∞
FigIMainload ofHXMT satellite
准直器的物理功能是让特定方向的x射线通过,吸收衰减来C1其它方向的x射线。能
够满足对高能x射线屏蔽要求的材料有钳(Pb)、钨(w)、钭(Ta)、蒋,参见表
丧1常m准Am材料的女减系数(140keV mT)
2
要求,多次热处理Ⅵ0是去除材料山应力及加i麻力, 从而保证了尺寸的稳定性,
贴附铝框架内表面钽片,并腔结,方
一
幽4钽准直∞方案模型
Fig
4n-collimatormodal
3精度测量 由丁准直器精度要求高,而且铋片较薄较软.栅格鲇构通道R寸义狭窄,精度测带难
度m常人。 比较光学测带法和机械接触式删甘法进行洲姑,机械洲苗法更加精确,升H可以洲时 到栅格内表面尺寸,更加直胱便捷。 采Ⅲ高精度的三座标测拮仪,其测姑示位误筹=3 力;6m可以}&好完成准直器的精度榆测。 如凹4所示.三坐标测昔仪自先拟台阻法兰基准端面H为其基准面.分别洲撤: l、法兰端面K与H平{i度; 2、圆杠面M和、的轴线与法兰端面H的难直度; 3、栅极与法兰端面H的碓卣度;
参考文献
[1]贾辉,姚勇,施伟杰.机械准直器的发展.北京:光学技术,2007,33(11):182—184 [2]胡宗泰,王佳棣等.医用图像成像装置现状及其发展趋势.中国医疗器械信息,1995,l(2):7-17 [3]李惕陪,吴枚.空间硬X射线调制望远镜.物理,2008,37(9):648-651 [4]谢一冈,陈昌,王曼等,粒子探测器与数据获取.北京:科学出版社,2003 [5]金颖康,吴牧等.H删T准直器方案的优化设计.高能物理与核物理,2007,31(7):612-615
1‘
锅合金框架形状复杂.精度要求极高,防II:自ll
I:中的变形是其戈键。加】越群中设训了两种9Ⅲl。
装,制定了包括四次机由¨L两玖线切割、二次热处
理的加川.艺,整个l岂可简要总结为:“粗下—— 热处理l——留余蟮线切割——热处理2——、17槠午 ——热处理3——线切割内腔——精车——检验锅
框架”,其中多次机加I。帛线切割确保结构精度满足 锅台金框架检测台格之后将其清沾,插入钽片 告完成高能准直器的加【‘制作。
2009第二十二届全国空间探测学术讨论会论文
高精度准直器的设计及测量
张爱梅1金永杰2王娟1吴枚1吴伯冰1张童1
‘(中国科学院高能物理研究所北京100049) 2(清华大学北京100084)
(E-mail:zhan羽m@m印.∞.∞。jinyj@tsiIl她edh∞。w柚西啪@ih印卫c.ca)
摘要:高精度准直器是广泛应用于空间探测和医疗器械等领域的关键设备,其 作用是对入射X射线进行调制准直。本文以硬X射线调制望远镜(H)(^lT)卫星的 高能准直器作为研究对象,以设计实现高精度准直器的为研究目标,经过反复优 化设计,提出了一种新型准直器的工艺方案,实现了栅格结构准直孔的规格化, 并研究出一套切实可行的精度测量方法。经测量高能准直器样件精度能够控制在 2 7以内,满足硬x射线调制望远镜(H删T)的科学目标需求。 关键词:I,高精度准直器2,栅格结构3,工艺方案4,测量方法