自升式钻井平台升降系统图例详解
海洋平台结构作业——自升式海洋平台升降结构

常见自升式海洋平台升降结构对比分析班级:学号:姓名:目录一、自升式平台简介 (3)二、现有常见升降结构 (4)1、圆柱型桩腿一单环梁液压升降装置 (4)2、方壳型桩腿—双环梁液压升降装置 (6)3、桁架型桩腿一齿轮齿条升降装置 (7)三、升降系统的对比 (8)1、桩腿结构形式对比 (8)2、触底形式对比 (9)3、升降装置对比 (10)4、动力源对比 (11)一、自升式平台简介自升式平台是一种海上活动式钻井装备,目前是我国海洋石油勘探中使用最多的一种钻井平台,由于其作业稳定性好和定位能力强,在大陆架海域的油气勘探开发中居极其重要的地位。
自升式平台主要由平台主体、桩腿、升降锁紧装置、钻井装置(包括动力设备和起重设备)以及生活楼(包括直升飞机平台)等组成。
平台在工作时用升降装置将平台主体提升到海面以上,使之免受海浪冲击,依靠桩腿的支撑稳定的站立在海底进行钻井作业。
完成任务后,降下平台主体到海面,拔起桩腿并将其升至拖航位置,即可拖航到下一个井位作业。
因此,支撑升降系统的结构对自升式海洋工作平台的安全有着至关重要的作用。
自升式平台的工作状态如图一所示。
图一二、现有常见升降结构支撑升降系统作为自升式平台中的核心部分,在平台的设计建造中历来受到高度重视,其性能的优劣直接影响到平台的安全和使用效果。
最常用的升降装置是齿轮齿条式和顶升液压缸式。
具体可见下表壳体桩腿是封闭型桩腿,其桩腿截面有圆形和方形两种形式;桁架式桩腿截面有三角形和四方形两种形式。
不同截面形状的桁架式和壳体式桩腿与不同类型的升降驱动方案相互组合,衍生出多种能够实现升降平台功能的支撑升降系统类型。
1、圆柱型桩腿一单环梁液压升降装置销子、销孔和项升液压缸是一种升降装置。
系统原理图如图二。
图二每一桩腿有两组液压动作的插销和一组顶升液压缸。
当装在环梁上的一组环梁销插入到桩腿的销孔中时,一组顶升液压缸的同步动作即可使环梁及销子带动桩腿(或平台主体)升降一个节距,然后进行换手:将锁紧销推入到桩腿的销孔中,退出环梁销,液压缸和环梁复位,下一个工作循环开始。
海上钻井平台各系统简介

海上钻井平台各系统简介钻井平台各系统简介不知道从什么时候起,石油的价格节节攀升。
能源越来越紧张的今天,很多国家把目光从陆地转向了海洋。
自从世界上第一个海洋钻井平台制造出来以后,海洋工程有了长足的发展。
在几十米甚至上3~4000米深的海底钻一口井并不是一件容易的事,因为在海上环境的复杂多变以及恶劣。
经常要承受巨浪和暴风的袭击。
而钻井又要保持一个相对稳定的作业环境。
才能把一根根长长的钻杆钻进海底。
钻井平台从近海到深海,主要可以分为座底式,自升式,半潜式、钻井船等。
座底式是指,平台的结构直接座在海床上,几乎和陆上钻井没多大区别。
所以它们的可钻探深度很有限。
只能在几十米的水深的浅海区域作业。
自升式,又叫jack-up。
顾名思义,这种平台可以象千斤顶一样可以升降它的高度。
它典型的特征就式3-4条腿。
高高的绗架结构。
上面安装又齿条。
平台本体安装有齿轮。
它们一起啮合,传动。
在到达钻井区域的时候,腿就慢慢的伸到海床上。
平台就靠这几条腿站在海里了。
因为考虑到拖航的稳性,腿不能太长。
所以这种平台一般在120~150米水深的近海区作业。
半潜式,最新的已经到了第6代了。
这种平台综合了钻井船和坐底式驳船的优点,是漂浮在海面上的。
这样的话,它们就可以在更深的水域工作了;船体灌放水,可以调节吃水深度,保持船体稳定。
塔的下部是相当容积的浮筒,上面是若干个中空的立柱,支撑着上部平台平台上面是全部的钻井装备和必要的生活设施。
整个平台靠浮筒浮在水面。
它们带有2~3级动态定位系统,海底声纳定位系统,卫星定位系统等来保证平台的相对稳定的坐标。
它们有各种位移补偿装置来补偿海况带来的不稳定状况。
钻井船,钻井船是设有钻井设备,能在水面上钻井和移位的船,也属于移动式(船式)钻井装置。
较早的钻井船是用驳船、矿砂船、油船、供应船等改装的,现在已有专为钻井设计的专用船。
目前,已有半潜、坐底、自升、双体、多体等类型。
钻井船在钻井装置中机动性最好,但钻井性能却比较差。
14自升式钻井平台升降电气系统教程
自升式钻井平台升降电气系统1培训对象:入职新员工;2培训内容:自升式钻井平台升降电气系统3教学目标:认识认识自升式平台升降系统的作用、原理、组成,使新员工掌握升降系统电气部分的保养方法。
4重点自升式平台升降电机系统的操作维护和保养5培训课时:5.1 理论培训:2 课时5.2 实操训练:0 课时6了解内容:自升式钻井平台升降电气系统工作原理:升降方式的分类:齿轮齿条式、液压缸升降方式。
7 掌握内容(重点):自升式平台升降电机系统的操作维护和保养8实操训练:9 案例某平台由于升降刹车线圈没有打开,而操作平台升降,造成升降齿轮掉。
某平台由于电机修理时电机转向接反,试运转时把主轴憋断。
10 考核:升降系统保养点及保养方法。
讲义1概述我公司钻井平台升降方式分为两类,一类是以南海1号、渤海四号、渤海8号、渤海10号、渤海12号为代表的齿轮升降方式;另一类是以渤海5号、渤海7号、渤海9号为代表的液压缸升降方式。
下面分别论述基于这两种升降方式的电气控制基本原理。
2自升式钻井平台升降电气系统工作原理:1)齿轮升降方式的电气系统原理这种升降方式的电气系统比较简单。
通常,在平台的三个桩腿上均匀分布着36套电机,每个电机驱动着一套相应的齿轮系统。
通过控制36台电机同步的正转或反转来达到平台上升/插桩或平台下降/拔桩的目的。
对电机的所有操作控制位于平台的中央控制室内的升降控制盘上,其中包括主控制开关、升降控制按钮、电机过载指示灯、紧急停止按钮、升降功率表和升降监控系统。
为了防止误操作的发生,主控制开关设计成钥匙开关的形式,当开关处于开的位置时系统得电,可以进行平台的升降操作;当开关处于关的位置系统失电,确保升降系统无法工作。
升降控制按钮共有9个分别控制3个桩腿的上升/插桩或平台下降/拔桩以及停止。
每个升降电机内部预埋了热敏电阻用于检测电机是否过载,如果某个电机电流超过设计值热敏电阻将促使操作盘上的相对应的过载指示灯闪烁发光,以提示操作人员。
基于三菱Q系列PLC自升式钻井平台控制系统

cnrl r io o o aa vl.nodroslet s rbe ip t fr adacnrl yt o jc - pdiigpa o ae o t e s ni lw cmprt e I re ov i o l op c i s i y t h p m,t us ow r o t s m fak u rl lt r b sd os e ln fm
mo o o tolrc mmo o t lsrO a l e Oa he esI Omoo o to. e mpo eteltc nr l rcs fe t ey T e i t n c nr l o e nc nr V mpi r t c iv ' trc nr 1Th s i rv i o to e ii e c v l . h o e i f e V e h f p on i
动控 制模 块 , 而导 致平 台升 降控制 精度 较低 。为 了解决 这 个 问题 , 出并 且设 计 了一 种 基于 三菱 Q系 列 P C的 自升 式 从 提 L 石油 钻井 平 台控制 系统 , 用卷 扬机 代替 昂贵 的齿轮 带 动平 台升 降 , 采 利用 Q系列 P C和运动 控制 器共 同控制 伺服 放大 器 L 来实 现对 伺服 电机 的控制 , 效地 提高 了升降 控 制精度 。经 实 际 证 明 , 控 制 系统 能 够有 效 并且 精 确 地 实现 平 台 的控 制 有 本 功 能 , 比现 有 的平 台控 制 系统 , 相 节省 了大量 的经 费开 支 。
第2 卷 l
第 1期 1
计 算 机 技 术 与 发 展
COMP UTE I CHNOL R ' E OGY AND DEVEL MENT OP
21 0 1年 1 1月
设计JU2000E升降基础分段建造方案
大连船舶工业船机重工有限公司JU2000E钻井平台升降基础作业指导书编制:审核:批准:日期:日期:日期:JU2000E钻井平台升降基础焊接作业指导书目录1.概述 (3)2.目的 (3)3.参考图纸 (3)4.升降基础结构的建造 (3)5.升降基础结构的吊装.............................. 错误!未定义书签。
6.焊接应力的消除.................................. 错误!未定义书签。
7.涂装............................................ 错误!未定义书签。
8.加工............................................ 错误!未定义书签。
9.完工检验及文档 (27)1.概述升降基础分段是自升式钻井平台的关键结构,是升降装置和锁紧装置的载体,为桩腿升降提供导向,起到连接桩腿和主船体的作用。
由于它的特殊用途,其板材多为高强度厚板,结构形式紧密,且分段精度要求较高,多处需要机加工。
升降基础分段的建造是整个平台建造的难点和关键。
JU2000E型自升式钻井平台共有3个桩腿,9个升降基础,结构形式相同,全部为焊透结构,每个升降基础分为上基础和下基础两部分。
2.目的2.1固化JU2000E自升式钻井平台升降基础分段建造方式和流程。
2.2为生产设计下料及焊接方式选择提供依据。
2.3指导施工人员合理正确施工,避免返工。
2.4控制升降基础分段建造精度,确保建造质量。
3.参考图纸3.1升降基础分段组立图;3.2升降基础焊接工艺规程;3.3基础加工与详图;3.4升降基础建造方案;3.5升降基础分段精度检测表。
4.升降基础结构的建造4.1钢板下料及坡口切割4.1.1所有钢板具有经过船级社认可的材质证件。
并且要检查钢板平整度,检查钢板表面是否有麻点等缺陷。
4.1.2所有升降基础上用的钢板均需要进行表面抛丸或喷砂除锈处理,表面粗糙度达到S a2.5级标准;表面除锈后要喷涂车间底漆保护。
试析自升式钻井平台钻井包介绍
试析自升式钻井平台钻井包介绍1 自升式钻井平台及钻井包主要系统介绍按系统及区域划分,平台主要由提升、悬臂梁滑移、钻井包(含水泥、泥浆、井控、管件作业等系统)、发电机及其配电、生活区及通风空调系统、内外通讯等系统组成。
钻井包作为实现钻井平台核心功能的重要区块,其功能的实现及过程安全控制,在整个平台完工调试中占有极其重要的地位。
以Letourneau workhorse自升钻井平台为例,钻井包主要含钻井控制系统、钻井甲板管件作业系统、高低压泥浆系统、干粉及其控制系统、井控系统、水泥等系统。
1.1 钻井控制系统钻井控制系统采用主流钻井AMHPION控制系统,此系统由操作人员自设备操作终端-钻井椅输入指令,信号采集-输入/输出模块进行信息收集,信息处理器-单板机进行信息集中处理,不间断供应电源确保电源供应以实现系统的持续运行,而且系统提供延展、备用接口,供客户进行设备更新或升级选择。
1.2 管件作业系统(Pipe Handling System)及简要工作流程管件作业是钻井系统重要作业环节,主要由钻井绞车(Drawworks)、顶驱(Top Drive)、管吊(Pipe Handing Crane)、猫步机(Catwalk Shuttle)、铁钻工(Rough Neck)、猫头(Cathead)、转台(Rotary Table)及排管机(Pipe Racking system)等设备组成。
整个钻井平台的管件作业分为井口(Tripping)及离线(Offine Standbuilding)两部分:首先,作业以管甲板为起点,采用特殊夹管器(Gripper yoke)作为专用工具,管吊将钻具(钻杆、钻铤等)吊起放置于猫步机;其次,操作人员自钻井椅操作设备,猫步机配合排管机将单根钻具送入钻井甲板狐狸洞,铁钻工完成上扣作业,排管机将接好的整柱钻具放入排管器,重复上述作业,完成管件的离线储备作业,供增加钻深时管件接长使用。
自升式钻井平台升降系统图例详解

图解自升式钻井平台升降系统(原创)3664人阅读| 3条评论发布于:2010-3-30 15:35:00海洋石油平台分类:采油模块自升式钻井平台半潜式钻井式平台储油船(FPSO)集储油和动力供给平台目前,我从事的工作是以自升式钻井平台建造工程,以平台电气系统设备调试为主要工作,下面介绍自升式钻井平台的概况及重要系统:升降系统。
我曾经参与制造的自升式钻井平台有:JU2000E系列:1~6号;中油海L780-1、L780-2;中海油937(CJ46);中油海胜利十号。
自升式钻井平台组成:主船体:主甲板面主要承载起重设备;钻井作业配套设备;通风设备;锚机设备;救生筏及悬臂梁液压滑移设备等;机舱机械甲板主要承载主发电、供电系统;暖通空调设备;海水、淡水设备;泥浆、钻井辅助设备;消防系统等;生活区:应急发电、应急供电系统;钻井办公、休息区;餐饮服务间;无线电通讯室;升降控制台;中央DCS系统控制室;救生艇;飞行甲板区;钻井作业区(悬臂梁及钻台):井架设备;钻台设备;防喷器设备;高压泥浆管线设备悬臂梁设备等;升降系统组成:一升降控制台:CENTRAL CONTROL CONSOLE二升降MCC:JACKING MCC三桩腿单元:LEG UNIT升降马达:JACKING MOTOR桩腿单元:桩腿单元是升降系统的重要组成部分,大部分钻井平台有三条桩腿,它起到将船体支撑在水面上,以便于进行水上钻井作业,同时,根据不同地域水深情况调整适合平台作业的水深高度,使悬臂梁移出达到钻井工位进行钻井工作。
平台的桩腿位于平台主船体的承重端点位置上,一般有三个桩腿,呈花架结构;它的升降移动是靠齿轮齿条传动,齿条间距:319.186mm;升降移动速度:0.45m/min;由升降电机带动齿轮变速箱输出动力给转动小齿轮,小齿轮与焊接在装腿上的齿条咬合达到传动效果,每个桩腿有三个玄管,每个玄管基础支架上有4~6个升降电机,使升降输出动力可靠;升降电机的组成与排列下图背面排列有三组六个电机。
自升式平台

此外,荷兰Huisman公司发展出概念新颖的旋转型悬臂梁,它通过径向与环向滑 轨实现移动,有与X—Y悬臂梁类似的可移动范围内均匀的可变载荷,但目前型 号的旋转型悬臂梁的可变载荷没有X—Y悬臂梁大,但旋转型悬臂梁可以在甲板 上抬高,可以增加甲板的可用面积。
(2)平台船体设计技术 自升式钻井平台的船体采用模块化设计与施工,加大甲板主尺寸和作业面积, 增大可变载荷和钻井物资储放能力,延长在偏远恶劣海域作业的自持力。将 平台生活区移到船艏,采用挑出式与包络式设计,既可减少悬臂梁钻井作业 发生事故时,对船员造成的伤害,也可以腾出甲板中部空间给作业堆料。另 一方面,悬臂梁悬挑作业时,会将平台整体重心往船艉移动。平台生活区的 前移,可以减少平台重心的后移量,减少左舷与右舷桩腿轴力的增加量。 (3)桩腿技术 新一代自升式钻井平台多采用超高强度钢、大壁厚、小管径壁厚比的主弦管 与支撑管,以减小水阻力与波浪载荷。一般采用具有高强度、高刚度的“X” 与逆“K”型管节点,并减少节点数量。在逆“K”型水平撑管上多采用叠加式 节R.G.勒托诺
随着材料、 设计与建造水平的不断进步 , 自升式钻井平 台的工作水深不断提高 (图3)。
2003建成的Rowan“波勃.帕尔 麦号”( Bob Palmer ) 是 Le — Tourneau公司的“ Super Gorilla XL”设计型号,它创下 了在墨西哥湾 168m(550ft)水 深工作记 录 ,总高度约273 m, 已达到金茂大厦总高度的2/3 。 据 RIGZONE网站统计,到 2 0
为尽快形成我国自主研发的海洋工程装备标准体系,推动自主研发设计 能力快速提高,2011年,经上海市质监局推荐,上海外高桥申报承担的 海洋工程装备-自升式钻井平台国家综合标准化示范项目正式获得国家 标准化管理委员会批准。项目建设周期将持续到2015年12月。
自升式钻井平台U2000E简介

4.2.4 斜拉筋 材料——ASTM A106 GR B or C · 纵向冲击试验值最小值在-27℃时27 J。 斜拉筋也必须满足船级社的下列要求和其它的铸碳钢要求: · 最高含碳量 0.21%; · 锰最小含量 0.60%; · t>25 mm,进行细砂抛光处理。 斜拉筋:直径φ168,壁厚11
6.BOP搬运系统
7.隔水管张紧系统
四、桩腿制造流程介绍
4.1 JU2000E(海洋石油942)桩腿概述
4.1.1 桩腿分段长度 海洋石油942桩腿全长约167米(从桩靴底部到桩腿顶部)。桩腿总长约164米 (包括盲齿条在内)。 桩腿从下往上分为7个分段制造:G1到G7; 每段的长度分别为: G1=19634.4 mm(包括盲齿条) G2/G3/G4/G5/G6=25603.2 mm G7=16459.4 mm
4.2 桩腿材料
(仅供参考)
JU2000E桩腿材料规格如下: 4.2.1 桩腿齿条 材料——调质钢 ASTM A517 GR Q ,A 级超声波探伤检查,屈服极限为690 MPa,抗拉强度为790/930 MPa,V 型缺口冲击最小平均值,纵向在-37℃、T/4 厚时为69 J,在 -27℃、T/2 厚时为69 J ,无裂纹和叠层的气切割齿,1/4 厚度 处的硬度为260 布氏硬度,真空除气,细晶粒最高含硫量为0.01%,最高含碳量 为0.18%。 厚度178MM,宽838MM 4.2.2 桩腿弦管 淬火、调质钢 ASTM A517 GR Q ,A 级超声波探伤检查,屈服极限为690 MPa,抗拉强度为790/930 MPa,V 型缺口冲击最小平均值,纵向在-37℃、T/4 厚时为69 J,在 -27℃、T/2 厚时为69 J ,最高含硫量为0.010%,最高含碳量 为0.18%。腿弦管成形后应进行热处理或应力消除。 壁厚83MM,宽700MM 4.2.3 斜拉筋和水平拉筋 材料——最小屈服极限 520MPa,纵向V 型缺口冲击测试在-40℃时41 J 或 在-37℃时45 J,最高含碳量0.18% 斜拉筋:直径φ273,壁厚21.4 水平拉筋:直径φ324,壁厚28.6
自升式海洋平台抬升控制系统

自升式海洋平台抬升控制系统摘要:讨论了自升式钻井平台的发展历史,抬升控制系统的主要特点及要求,进一步阐述了设计理念与主要技术,给出平台抬升控制系统的产品特点及未来的展望。
0 前言随着世界经济进入资源环境瓶颈期,在全球石油需求持续增速背景下,及陆地油气资源开采出现瓶颈的大环境下,势必拉动海洋石油勘采的资本支出。
全球正进入到全面开发利用海洋的时代,各国对海洋资源的开发和争夺异常激烈,海工装备市场将迎来前所未有的商机。
我国陆地油气资源勘探开发程度现已很高,油气资源正迅速减少。
向海洋进军,开发新的油气资源已成必然趋势。
我国拥有漫长的海岸线和广阔的海域,油气资源十分丰富。
在渤海,南黄海,东海,南海已有发现并进入早起开采。
我国“船舶工业中长期发展规划”要求大力开展技术创新,提高自主研发能力。
根据我国能源发展的形式和要求,为我国海洋油气勘探开发提供新型,经济,实用的海洋工程装备是我国造船界面临的新的机遇和挑战,也是责无旁贷的光荣任务。
1、抬升控制系统随着对油气资源开发利用的深化,油气勘探开发从陆地转入海洋。
海上钻井平台的稳定性和安全性更显重要。
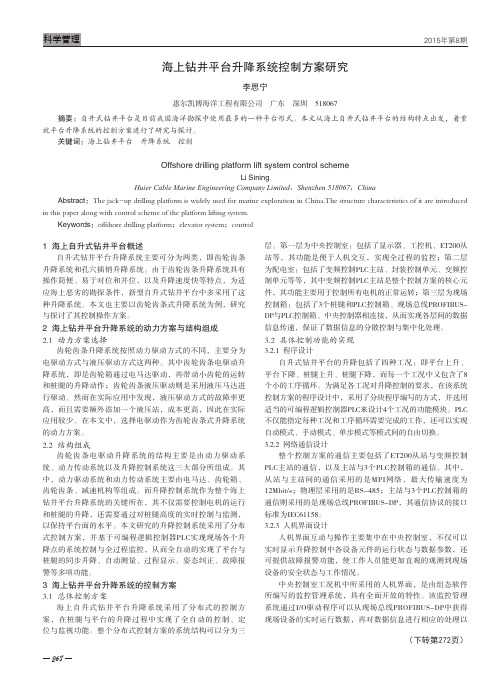
当作业水深在250至300 英尺范围内,自升式钻井平台被普遍采用。
自升式钻井平台即带有能够自由升降的桩腿,作业时桩腿下伸到海底,站立在海床上,利用桩腿托起船壳,并使船壳底部离开海面一定的距离(气隙)。
拖航时桩腿收回,船壳处于漂浮状态。
图1 自升式钻井平台自升式钻井平台有两种型式,独立桩腿式和沉垫式。
平台稳定站立后,大多数悬臂梁可以将钻台外伸到固定平台。
在风大浪急的海面不能进行拖航。
1)支撑型式:桩靴式;沉垫式。
2)升降装置:液压缸升降(插桩式);齿条/齿轮箱。
3)桩腿结构型式:筒型;绗架。
4)桩腿数量:3腿;4腿;6腿。
5)槽口:有槽口;无槽口。
6)生活楼的布置:横向布置;周边布置。
自升式钻井平台,又称为桩脚式钻井平台,是目前国内外应用最为广泛的钻井平台。
自升式钻井平台可分为三大部分;船体,桩脚和升降机构。
R-550D自升式钻井平台升降系统的调试

建造与修理71GUANGDONG SHIPBUILDING 广东造船2021年第1期(总第176期) 作者简介:段谟簿 (1986-),男,工程师。
主要从事船舶平台调试、电装工作。
练博强 (1985-),男,工程师。
主要从事船舶、平台工法研究工作。
收稿日期:2019-10-15R-550D 自升式钻井平台升降系统的调试段谟簿,练博强,蓝巨滔(中船黄埔文冲船舶有限公司,广州510715)摘 要:R-550D 自升式钻井平台中采用电动齿轮式升降系统,该系统由多个升降模块构成,均匀分布在各桩腿两侧。
自升式平台在下水后,依靠其升降系统进行站桩作业,以方便码头舾装的进行。
因此,升降装置需在下水后进行联调试验,以确保其尽快达到可使用状态。
关键词:升降系统;组成;调试中图分类号:U674.38 文献标识码:AJacking System Commissioning Difficulties and Solutions of R-550DJack-up Drilling PlatformDUAN Mobu, LIAN Boqiang, LAN Jutao( CSSC Huangpu WenChong Shipbuilding Co., Ltd., Guangzhou 510715 )Abstract: The R-550D jack-up drilling platform adopts electric gear jacking system, which is composed of several jacking units and evenly distributed on both sides of each pile leg. After launching the jack up platform needs to rely on its jacking system for pile operation, so as to facilitate the outfitting at wharf. Therefore, the jacking device should be jointly commissioned after launching to ensure that it could be used as soon as possible. This paper discusses the commissioning difficulties and solutions of the jacking system of the R-550D jack-up drilling platform.Key words: Jacking System; Composition; Commissioning1 概述自升式钻井平台的升降系统,一般安装在自升式平台的桩腿和平台主体的交界位置,经由升降装置驱动平台主体作升、降运行,以满足海上平台相对高度作业需要。
自升式海上钻井平台升降系统技术特点分析 (1)

随着海洋开发战略的不断发展,对于海洋工程 装备的需求将日益旺盛,从自升式海上平台升降系 统的发展趋势来看,应着手研究开发电驱动式升降 系统。
参考文献 [1] 《自升式海洋平台齿轮齿条升降系统的研究》 作者:孙永泰
《石油机械》 2004-10-10. 收稿日期:2011-03-09
以每种新的传动形式的升降机构都需要进行破坏试
见表1电动齿轮齿条升降系统厂家名称法国blm荷兰msc美国letourneau驱动方式电动机驱动电动机驱动电动机驱动自升式海上平台升降系统汇总升降单元型号额定提升力c50180tc105270t150t300t170t200t450t270t320t360t齿条型式升降单元布置方案预压拔桩提桩等等每种工况过程中升降机构的受力状况以及升降速度的变化都需要进行分析否则对于升降系统的结构形式和传动方式选择都无法进行
725KIP 800KIP
(320t) (360t)
单边齿条 布置:18
机构的设计制造经验,对于其受力分析、动力学研
究、振动噪声控制、弹性啮合原理以及载荷分配等
(2) 国内方面
方面还需要进一步的研究;
近几年,国内从事海洋工程的各大公司和科研
(3) 高强度超大模数齿轮的设计与制造 与齿条啮合的小齿轮为超大模数齿轮,模数一
驱动 升降单元型号 齿条
升降单元
受力状况以及升降速度的变化都需要进行分析,否 名称
则对于升降系统的结构形式和传动方式选择都无法 法国
BLM
进行;
方式
电动机 驱动
(额定提升力) 型式
布置方案
C50 (180t) C105 (270t)
齿条数/桩腿:2 双边齿条
C50 布置:36 或单边齿条
海上钻井平台升降系统控制方案研究
1 海上自升式钻井平台概述自升式钻井平台升降系统主要可分为两类,即齿轮齿条升降系统和孔穴插销升降系统。
由于齿轮齿条升降系统具有操作简便、易于对位和并位,以及升降速度快等特点,为适应海上恶劣的勘探条件,新型自升式钻井平台中多采用了这种升降系统。
本文也主要以齿轮齿条式升降系统为例,研究与探讨了其控制操作方案。
2 海上钻井平台升降系统的动力方案与结构组成2.1 动力方案选择齿轮齿条升降系统按照动力驱动方式的不同,主要分为电驱动方式与液压驱动方式这两种。
其中齿轮齿条电驱动升降系统,即是齿轮箱通过电马达驱动,再带动小齿轮的运转和桩腿的升降动作;齿轮齿条液压驱动则是采用液压马达进行驱动。
然而在实际应用中发现,液压驱动方式的故障率更高,而且需要额外添加一个液压站,成本更高,因此在实际应用较少。
在本文中,选择电驱动作为齿轮齿条式升降系统的动力方案。
2.2 结构组成齿轮齿条电驱动升降系统的结构主要是由动力驱动系统、动力传动系统以及升降控制系统这三大部分所组成。
其中,动力驱动系统和动力传动系统主要由电马达、齿轮箱、齿轮齿条、减速机构等组成。
而升降控制系统作为整个海上钻井平台升降系统的关键所在,其不仅需要控制电机的运行和桩腿的升降,还需要通过对桩腿高度的实时控制与监测,以保持平台面的水平。
本文研究的升降控制系统采用了分布式控制方案,并基于可编程逻辑控制器PLC实现现场各个升降点的系统控制与全过程监控,从而全自动的实现了平台与桩腿的同步升降、自动测量、过程显示、姿态纠正、故障报警等多项功能。
3 海上钻井平台升降系统的控制方案3.1 总体控制方案海上自升式钻井平台升降系统采用了分布式的控制方案,在桩腿与平台的升降过程中实现了全自动的控制、定位与监视功能。
整个分布式控制方案的系统结构可以分为三层。
第一层为中央控制室:包括了显示器、工控机、ET200从站等,其功能是便于人机交互,实现全过程的监控;第二层为配电室:包括了变频控制PLC主站、封装控制单元、变频控制单元等等,其中变频控制PLC主站是整个控制方案的核心元件,其功能主要用于控制所有电机的正常运转;第三层为现场控制箱:包括了3个桩腿和PLC控制箱、现场总线PROFIBUS-DP与PLC控制箱、中央控制器相连接,从而实现各层间的数据信息传递,保证了数据信息的分散控制与集中化处理。
自升式海上钻井平台液压升降系统解析

自升式海上钻井平台液压升降系统解析摘要:本文对海洋平台液压升降系统以往的情况,对液压举升系统的结构,工作过程,液压控制系统进行分析。
关键词:液压升降系统;分析介绍一.引言自升式海上钻井平台液压升降系统,由一组独立的海上钻井平台提高液压驱动系统,确保桩腿可以克服泥砂带来阻力和自身重力,将桩腿插入或拔出海床和升降平台。
根据升降平台、操作、自储存、预压等的重量计算出压力条件下的重量和重力,确定正常的起重能力,预提升系统容量的提高起升速度。
液压升降系统的设计平台应满足以下功能:确保系统有足够的力量去克服阻力和平台的重力,将桩体腿插入或拔出;在桩腿的工作过程,转动应平稳,无卡阻现象;插桩或桩过程,液压能满足一定的节距的要求;系统设计自锁液压升降系统,在各种工作和非工作状态时,该系统可以实现自锁,由计算机或控制台命令完成升降工作。
二.国内外自升式海上钻井平台现状随着陆地油气资源开采力度的日渐加大和油气储量的不断减少,占全球资源总量约34%的海洋石油资源已成为人们关注的焦点和新一轮油气勘探开发的热点。
海洋钻井平台作为海上油气勘探开发的重要装备之一,目前已在世界范围内受到了普遍关注。
受海洋作业恶劣环境的影响,海洋钻井平台技术发展在近十几年中发生了重大变化,人们已经不再满足于过去传统的平台装备技术和钻探方式,而是逐渐将目光从浅海移向深海、由浅油气层转向深油气层、由简单地质层转向复杂地质层等,从而使得海洋钻井平台装备也随之由过去比较单一的固定式、自升式等装备发展到技术先进、控制性好、钻探能力强、适应范围广的钻探船、半潜式平台等勘探开发装备上来,并已成为当前和今后一段时间内世界海洋油气勘探开发的必然趋势。
纵观世界海洋钻井平台的发展历史,自1887年世界上最早的海上石油勘探开发工作起源以来,直到50多年以后,也就是20世纪40年代末期,海上石油工程才开始有了新的起色并发生了较大变化。
当时世界范围内共有3个国家能够从事海上石油开发工作,所用的平台都是固定式平台,且结构和钻井方式均比较简单,平台适应水深的能力只有几十米。
钻井平台设备图解2
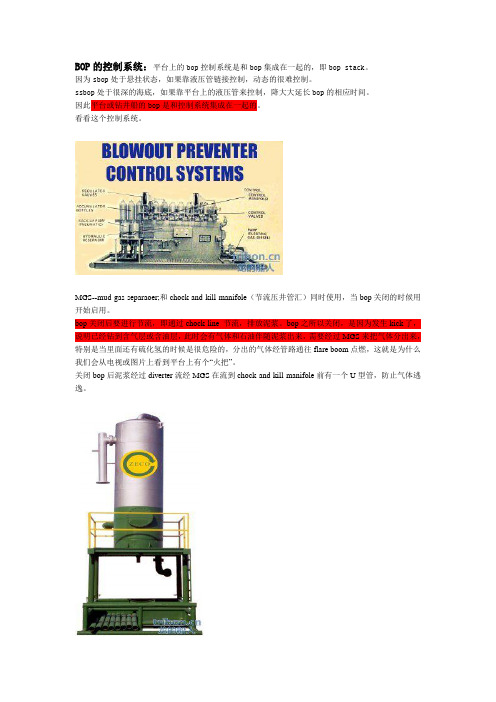
BOP的控制系统:平台上的bop控制系统是和bop集成在一起的,即bop stack。
因为sbop处于悬挂状态,如果靠液压管链接控制,动态的很难控制。
ssbop处于很深的海底,如果靠平台上的液压管来控制,降大大延长bop的相应时间。
因此平台或钻井船的bop是和控制系统集成在一起的。
看看这个控制系统。
MGS--mud gas separaoer;和chock and kill manifole(节流压井管汇)同时使用,当bop关闭的时候用开始启用。
bop关闭后要进行节流,即通过chock line 节流,排放泥浆。
bop之所以关闭,是因为发生kick了,说明已经钻到含气层或含油层,此时会有气体和石油伴随泥浆出来,需要经过MGS来把气体分出来,特别是当里面还有硫化氢的时候是很危险的,分出的气体经管路通往flare boom点燃,这就是为什么我们会从电视或图片上看到平台上有个“火把”。
关闭bop后泥浆经过diverter流经MGS在流到chock and kill manifole前有一个U型管,防止气体逃逸。
chock and kill manifold:节流压井汇管kill是当打开bop是把泥浆充在ram上面来平衡ram上下压力,防止打开时候损坏ram上的橡胶。
chock在MGS一帖里讲过。
实际上chock manifold 和kill manifold是可以分开的,现在多数情况都是把两者和在一起,有专门厂商提供。
DP3--DYNAMIC POSITIONING (CLASS)3:DP -DYNAMIC POSITIONING 动力定位。
其中的3是要求等级。
有0,1,2,3种等级,不同船级社说法有点不同。
DP3是GL说法。
大概就是依靠一系列传感器获得船舶或平台的移动信息,通过计算机控制几个推进器进行位置修正。
目的是使平台在复杂海况下保持位置在允许范围内变动,确保riser和钻管不会有太大偏移。
还可以用在其他工程船,游轮等上面。
自升式海洋钻井平台升降系统的分析与研究

自升式海洋钻井平台升降系统的分析与研究作者:吴碧珺来源:《科技创新与应用》2015年第16期摘要:随着世界经济的飞速发展,海洋开发己经成为世界技术革新的重要内容,而海洋油气田的开发又是现今海洋资源开发利用的重中之重。
自升式海洋钻井平台是海洋油气勘探和开发的主要装备。
目前,国内使用的钻井平台中的控制系统基本都由国外制造,国内对其升降系统的分析相对较少。
所以,探讨和研究这一方面的内容意义深远。
关键词:自升式平台;升降系统;齿轮齿条式1 概述升降系统是自升式海洋钻井平台的关键部分。
其位置位于平台的主体和桩腿的交接处,作用是让桩腿和船体作相对的上下运动,从而使得平台主体能上下移动并将其固定在桩腿的某一位置。
根据升降系统结构形式的不同,一般可分为液压油缸式升降系统和齿轮齿条式升降系统。
液压油缸式的优点是:油缸的结构简单,力的传递直接,安全性高。
缺点是:桩腿升降框架的结构庞大,用钢量很大,操作的工序相对更复杂。
齿轮齿条式的优点是:升降运动连续性好,传动的速度快,可调速,受载均匀,操作简单,井位易对准。
缺点是:齿轮齿条的制作难度大,成本高,控制相对复杂。
由于海洋环境比较恶劣,平台升降所需要的时间对于平台的安全性就显得非常重要,同时运用齿轮齿条式升降平台可减少平台的就位费用,因此目前多采用此类系统。
2 齿轮齿条升降系统的设备组成齿轮齿条式升降系统通常由升降装置、升降框架、导向装置、桩腿以及电控系统组成。
升降装置一般由电动机、减速箱、制动器、小齿轮等组成,如图1所示。
电动机以前常用的是滑差式电机,后来变频技术越来越成熟,而且控制方便,于是逐渐取代了滑差式电动机。
减速箱一般由平行轴轮系和行星轮系两部分构成,速比很大,有的甚至上万。
制动器通常选择的是电磁圆盘式,其扭矩一般不小于1.2倍的暴风载荷。
小齿轮由高强度合金钢经特殊工艺加工而成,齿数一般为7齿,模数通常为80以上,目前世界上最大的小齿轮模数已经达到了110。
图1 齿轮齿条升降装置升降框架一般为封闭性环梁结构,如图2所示,它是连接升降装置和平台主体的框架,起承上启下的作用。
自升式海上钻井平台液压升降系统解析

自升 式 海 上 钻 井 平 台 液 压 升 降 系 统 由一套 独 立 的 液 压 驱动 系 统提 供 动 力 ,确 保 桩 腿 可 克 服泥
土 、砂 石 等 带 来 的 阻 力和 升 降平 台 自身 的 重 力 , 将 桩 腿 插 入 或 拔 离 海床 以及 升 降整 个 平 台 。根 据 平 台升 降工 况 、作 业 工 况 、 自存 工况 、预 压 工 况 的 重量 重心 计 算 及 环 境 载 荷 的 计 算 结 果 ,确 定升 降 系 统 的 正 常升 降 能力 、预 压 升 降能 力 、 船 体 升 降 速 度 。海 上平 台液 压 升 降系 统 设 计 应 满 足 以下 功 能 :确 保 系 统 有 足够 的动 力 克服 泥 土 、砂 石 等 阻 力 与 平 台 自身 的 重 力 ,将 桩 腿 体 插 入 或 拔 离 海
( )上 插销 卸 载 。控 制 主 油缸 继 续缩 回 ,直 2 至 上插 销 纵 向位 置 传 感 器 发 出 信 号 停 止 动 作 。即 上插 销 已经脱 离 桩腿 内孔壁 , 载 荷 已经 全 部 转 移
到下 插销 ;
销 已经 脱 离 桩 腿 内孔 壁 , 载荷 已经 全 部 转 移 到 下 插销。
主 油 缸 为 桩 腿 提 供 主 要 动 力 ,顶 部 与 底 部 分 别 连 接 上 环 梁 和 下环 梁 机 构 。 除此 之 外 在 主 油 缸 上 还 安 装 了位 移 传 感 器 与 行 程 开关 ,协 助 主 油缸 与插 销 油缸 协调 工作 。
销 已经 脱 离 桩腿 内孔 壁 ,载 荷 已经 全 部 转 移 到 上 插销 。 ( )下插 销 拔 出 。控 制 下插 销 油缸 缩 回 ,拔 6 销 到位 后 , 下插 销 水 平 位 置 传 感 器 发 出信 号 , 系 统 自动停 止插 销油 缸动 作 。 ( )重 复步 骤 ( )。 7 1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图解自升式钻井平台升降系统(原创)
3664人阅读| 3条评论发布于:2010-3-30 15:35:00
海洋石油平台分类:
采油模块
自升式钻井平台
半潜式钻井式平台
储油船(FPSO)
集储油和动力供给平台
目前,我从事的工作是以自升式钻井平台建造工程,以平台电气系统设备调试为主要工作,下面介绍自升式钻井平台的概况及重要系统:升降系统。
我曾经参与制造的自升式钻井平台有:JU2000E系列:1~6号;中油海L780-1、L780-2;中海油937(CJ46);中油海胜利十号。
自升式钻井平台组成:
主船体:主甲板面主要承载起重设备;钻井作业配套设备;通风设备;锚机设备;救生筏及悬臂梁液压滑移设备等;
机舱机械甲板主要承载主发电、供电系统;暖通空调设备;海水、淡水设备;泥浆、钻井辅助设备;消防系统等;
生活区:应急发电、应急供电系统;钻井办公、休息区;餐饮服务间;无线电通讯室;升降控制台;中央DCS系统控制室;救生艇;飞行甲板区;
钻井作业区(悬臂梁及钻台):井架设备;钻台设备;防喷器设备;高压泥浆管线设备悬臂梁设备等;
升降系统组成:
一升降控制台:CENTRAL CONTROL CONSOLE
二升降MCC:JACKING MCC
三桩腿单元:LEG UNIT
升降马达:JACKING MOTOR
桩腿单元:
桩腿单元是升降系统的重要组成部分,大部分
钻井平台有三条桩腿,它起到将船体支撑在水
面上,以便于进行水上钻井作业,同时,根据
不同地域水深情况调整适合平台作业的水深
高度,使悬臂梁移出达到钻井工位进行钻井工
作。
平台的桩腿位于平台主船体的承重端点位置上,一般有三个桩腿,呈花架结构;
它的升降移动是靠齿轮齿条传动,齿条间距:319.186mm;升降移动速度:0.45m/min;
由升降电机带动齿轮变速箱输出动力给转动小齿轮,小齿轮与焊接在装腿上的齿条
咬合达到传动效果,每个桩腿有三个玄管,每个玄管基础支架上有4~6个升降电机,使升降输出动力可靠;
升降电机的组成与排列
下图背面排列有三组六个电机。
电机内部接线有:主电源,电机加热器,热敏电阻,刹车绕组,刹车行程开关。
每个传动齿轮轴一端安装有负荷传感器,将齿轮承受重量以模拟量信号传送给MCC
上的PLC模块,再将计算结果以通讯方式传给升降控制台,显示在触摸屏上。
每个桩腿升降基础上面安装有一个计米器,其转动齿片与桩腿齿条咬合,同轴连接一个转动小齿片,当大齿片带动小齿片转动时,会给高度检测装置上的传感器一个脉冲信号,通过变送器送到升降PLC计算脉冲,将计算结果经过通讯线传送到升降控制台的上位机,在控制台每组显示屏上显示每条桩腿的上升、下降高度,以便于操作者监控掌握平台高度和操作。
升降控制台
控制结构:
整个平台升降的操作主要集中在升降控制台,在升降控制台上通过操作升或降按钮,将升平台或降平台指令由通讯数据线传达到三个升降马达控制柜(MCC),控制升降马达完成升降动作。
新式升降控制台
升降控制台上安装有三组触摸式设置屏,分别显示三条桩腿工作状态。
(这是)
升降台触摸屏状态显示
一条桩腿一组显示屏,屏上显示每个升降齿轮承受的重量,平台总重量,升降电机
工作电流,有功功率、逆功功率,桩腿高度等
控制台上有两个物理水平仪和一个电子水平仪,以保障平台控制在安全倾斜范围之内(一般设置为:1.5度报警,2.5度停车)。
控制台柜内黑色三角元件为电子水平仪,摆放位置与桩腿布置相同,以体现真实水平状态。
电子水平仪触摸显示屏显示平台水平状态
电子水平仪触摸显示屏与船体方向显示一
致,以便于判断平台倾斜放向(若平台倾斜超
出设定范围会产生报警)
一般设置为:
1.5度报警,
2.5度停车。
紧急状态下,可以打开倾斜状态忽略开关进行紧急操作!(在面板上由钥匙控制)
***操作注意事项***
升降时三条桩腿分别启动,启动间隔在2秒~5秒之间,不得超出或小于时间范围,否则会导致平台倾斜,桩腿与桩腿基础产生摩擦。