计算机组成原理-微程序控制器
_微控制器

课程实验报告课程实验名称:计算机组成原理微程序控制器专业班级:学号:姓名:指导教师:报告日期: 2013年6月20日计算机科学与技术学院目录一、实验目的 (2)二、实验设备 (2)三、实验任务 (2)四、芯片说明 (2)五、实验要求 (6)六、实验步骤 (7)七、最终电路检测 (16)八、实验体会和收获 (16)九、实验中碰到的问题和解决的方法 (17)一、实验目的1. 复习与巩固微程序控制器基本原理。
2. 练习简单微程序的控制与调试。
3. 为整机实验做准备。
4. 进一步加深对运算器、存储器及时序电路的理解。
5. 熟练连接硬件电路,为课程设计做好准备。
二、实验设备实验台:JZYL—Ⅱ型计算机组成原理实验仪一台。
主要芯片:74LS6116:静态存储器芯片1片74LSl81:运算器芯片2片74LS373:八D锁存器3片74LS244:八路原码输出三态门1片74LS193:同步4位计数器1片其它基本器件若干三、实验任务1. 按照下面的参考电路实现取数、加法、或操作等运算。
(提示:尽量控制信号最少)2. 复习前两个实验电路中各个信号的含义和作用,好好思考其中的协作关系。
重点是运算与存储器之间的建立用微命令控制数据通路。
四、芯片说明74LS193:74LS193是同步四位二进制可逆计数器,它具有双时钟输入,并具有同步清除和同步置数等功能,其引脚排列及逻辑符号如下图4.1所示。
图4.1 74LS193的引脚排列图引脚功能含义如下:LOAD 为置数端,CLEAR 为清除端;UP为加计数端,DOWN 为减计数端;A、B、C、D为计数器输入端,Q0、Q1、Q2、Q3为数据输出端。
74LS6116:74LS6116芯片为静态RAM6116,6116是2K*8位静态随机存储器芯片,当电源关闭时,RAM不能保留其中的数据,其采用CMOS工艺制造,单一+5V供电,额定功耗160mW,典型存取时间200ns,24线双列直插式封装。
多思计算机组成原理实验四微程序控制器实验

实验四.. .微程序控制器实验。
1.-实验目的。
.(1)掌握微程序控制器的组成原理和工作过程。
(2)理解微指令和微程序的概念,理解微指令与指令的区别与联系。
(3)掌握指令操作码与控制存储器中微程序的对应方法,熟悉根据指令操作码从控制存储器中读出微程序的过程。
2.+实验要求。
(1)做好实验预习,看懂电路图,熟悉实验元器件的功能特性和使用方法。
u(2)按照实验内容与步骤的要求,认真仔细地完成实验。
(3)写出实验报告。
3.-实验电路。
. . ..本实验使用的主要元器件有: 4位数据锁存器74LS175,2KX8EPROM2716,时序发生器,或门、与门、开关、指示灯等。
芯片详细说明请见附录。
图1为实验电路图,其中3片EPROM2716构成控制存储器,1片74LS175为微地址寄存器,与74LS175数据输入引脚相连的输入信号线及6个门电路构成了地址转移逻辑。
注.意,2716输出信号中带后缀“#"的信号为低电平有效信号,不带后缀“#”的信号为高电平有效信号。
为简化电路结构,本实验没有使用微命令寄存器,并且在虚拟实验系统中,将3片EPROM组合为-一个虚拟EPROM组件。
本实验使用的EPROM和时序发生器一-样,均为虚拟实验系统提供的虚拟组件。
(5)答:000001101000000111100001 000001100000010110100010 000001101000011101100011 000001001000100111111000 000001101100000110100010 000001101000011101100011 000001001000100111111000 000001101100000110100010 000001101000011101100011 000001001000100111111000(6)(7)04 0 0 0 0 0 1 0 0 1 0 0 1 0 0 1 1 1 1 1 0 0 1 0 105 0 0 0 0 0 1 1 0 1 0 1 0 0 0 0 1 1 1 0 0 0 1 1 006 1 0 0 1 0 1 1 0 1 1 0 0 0 0 0 0 1 1 1 0 0 0 1 007 0 0 0 0 0 1 0 0 1 0 0 0 0 0 1 1 1 1 1 0 1 1 0 014 0 0 0 0 0 1 0 1 1 0 0 0 0 0 0 1 1 1 0 0 0 0 1 015 0 0 0 0 0 1 0 0 0 0 0 0 0 1 0 1 1 1 1 0 0 0 1 0。
实验四 微程序控制器实验

1、掌握微程序控制器的组成原理;
2、掌握微程序的编制、写入,观察微程序的运行;
3、为整机实验打好基础。
实验原理:
实验所用的时序电路原理可以参考时序实验。由于时序电路的内部线路已经连好(时序电路的CLR已接到实验板中下方的CLR清零开关上),所以只需将时序电路与方波信号源连接即可。
1、微程序控制电路
0
0
0
0
0
0
1
1
0
0
0
0
0
0
1
0
0
0
1
0
0
0
0
0 1
0
0
0
0
0
0
0
1
1
1
1
0
1
1
0
1
1
0
0
0
0
0
1
0
0 2
0
0
0
0
0
0
0
0
1
1
0
0
0
0
0
0
0
1
0
0
1
0
0
0
0 3
0
0
0
0
0
0
0
0
1
1
1
0
0
0
0
0
0
0
0
0
0
1
0
0
0 4
0
0
0
0
0
0
0
0
1
0
1
1
0
0
0
0
0
0
0
0
计算机组成原理实验3-微程序控制器实验
经济管理学院信息管理与信息系统专业班 __组学号姓名协作者教师评定_____________ 实验题目_ 微程序控制器实验_________________1.实验目的与要求:实验目的:1.理解时序产生器的原理,了解时钟和时序信号的波形;2.掌握微程序控制器的功能、组成知识;3掌握微指令格式和各字段功能;4.掌握微程序的编制、写入、观察微程序的运行,学习基本指令的执行流程。
实验要求:按练习一要求完成测量波形的操作,画出TS1、TS2、TS3、TS4的波形,并测出所有的脉冲Φ的周期。
按练习二的要求输入微指令的二进制代码表,并单步运行五条机器指令。
2.实验方案:1.用联机软件的逻辑示波器观测时序信号:测量Φ、TS1、TS2、TS3、TS4信号的方法:(1)按图接线,接一根即可;(2)把探笔的探头端按颜色分别插到试验仪左上角的CH1、CH2,黑探头插CH1,红探头插CH2,将黑探笔的探头插在Φ接线的上孔,将红探笔的探针夹在TS1两针之间;(3)将实验仪的STOP开关置为RUN、STEP开关置为EXEC,“SWITCH UNIT”中CLR开关置为1状态,按动START按键;(4)启动“组成原理联机软件”,点击“调试”菜单下的“显示逻辑示波器窗口”,点击示波器开关,即可在屏幕上看到波形。
使用“步数”或“速度”调整波形,波形调整好后,不要用同步通道来稳定波形,应该单击示波器开关,这样整个波形都停下来;(5)鼠标停留在波形线上,会有时间提示,两者相减可以算出波形周期;(6)测完Φ和TS1后,接着测量TS1和TS2,把黑红探针分别夹在TS1两根针之间和TS2两根针之间,相互比较,可以测量TS1和TS2之间相位关系。
同理通过测量TS2、TS3可以测量出TS2和TS3之间相位关系,同理通过测量TS3、TS4可以测量出TS3和TS4之间相位关系。
2.观察微程序控制器的工作原理:(1)关掉实验仪电源,拔掉前面测时序信号的接线,按图连接实验电路,仔细检查无误后接通电源;(2)编程写入E2PROM 2816A.将编程开关(MJ20)置为PROM状态;B.将实验板上STATE UNIT中的STEP置为“STEP”状态,STOP置为“RUN”状态,“SWITCH UNIT”中CLR开关置为1状态; C.在右下角的“SWITCH UNIT”中UA5-UA0开关上表3.2中某个要写的微地址;D.在MK24-MK1开关上置表3.2中要写的微地址后面的24位微代码,24位开关对应24位显示灯,开关置为“1”时灯亮,开关置为“0”时灯灭;E.启动时序电路(按动启动按钮START),即将微代码写入到E2PROM 2816的相应地址对应的单元中;F.重复C-E步骤,将表3.2的每一行写入E2PROM 2816。
计算机组成原理实验三
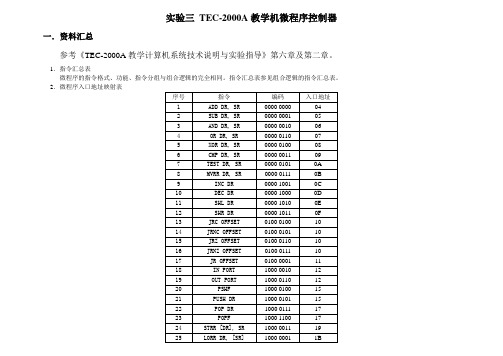
实验三TEC-2000A教学机微程序控制器一.资料汇总参考《TEC-2000A教学计算机系统技术说明与实验指导》第六章及第二章。
1.指令汇总表微程序的指令格式、功能、指令分组与组合逻辑的完全相同。
指令汇总表参见组合逻辑的指令汇总表。
2.微程序入口地址映射表注:该指令入口地址映射表中,前29条指令为基本指令,所有基本指令都已编程到微程序控制器中;后19条为扩展指令,需用户自己确定完成各步操作所需的控制微码,并将微码扩展到MAPROM和七片MPRAM中去。
在《TEC-2000教学计算机系统说明与实验指导》的《微程序控制器》一章中已给出小板上的SCC(GAL20V8)和大板上七片GAL20V8的逻辑表达式,其中包括扩展指令,用户在扩展指令时不必改写这八片GAL20V8的逻辑表达式。
3.指令流程框图基本指令执行流程框图注: 12是IN/OUT两条指令的入口地址,IN指令由12跳到14,OUT指令由12跳到13.15是PUSH/PSHF两条指令的入口地址,PUSH指令由15跳到1A,PSHF指令由15跳到16.17是POP/POPF两条指令的入口地址,POP指令由17跳到1C,POPF指令由17跳到18.在地址3A处放的是一条空操作指令,只起跳转的作用,用户在扩展中断隐指令时,可将该地址的这条指令用中断隐指令代替.扩展指令执行流程框图0063664.指令流程表微程序表二.微程序控制器实验实验目的通过看懂教学计算机中已经设计好并正常运行的数条基本指令(例如,ADD、MVRR、OUT、MVRD、JR、RET等指令)的功能、格式和执行流程,然后自己设计几条指令的功能、格式和执行流程,并在教学计算机上实现、调试正确。
其最终要达到的目的是:1.深入理解计算机微程序控制器的功能、组成知识;2.深入地学习计算机各类典型指令的执行流程;3.对指令格式、寻址方式、指令系统、指令分类等建立具体的总体概念;4.学习微程序控制器的设计过程和相关技术。
五邑大学计算机组成原理实验报告三:微程序控制器实验

《计算机组成原理》实验报告学院:计算机学院专业:计算机科学与技术班级学号:150801 3115000820学生姓名:黄家燊实验日期:2016.12.25指导老师:李鹤喜五邑大学计算机学院计算机组成原理实验室实验一一、实验名称:微程序控制器实验二、实验目的(1)掌握微程序控制器的功能、组成知识。
(2)掌握为程序的编制、写入、观察微程序的运行二、实验设备:PC机一台,TD-CM3+实验系统一套三、实验原理:微程序控制器的基本任务是完成当前指令的翻译和执行,即将当前指令的功能转换成可以控制的硬件逻辑部件的为命令序列,完成数据传送和个汇总处理操作,他的执行方法是将控制各部件的微命令的集合进行编码,即将微命令的集合仿照及其指令一眼,用数字代码的形式表示,这种表示陈伟微指令。
这样就可以用一个微指令序列表示一条机器指令,这种为指令序列称作为程序。
微程序存储在一种专用的存储器中,成为控制储存器四、实验步骤1.对为控制器进行读写操作:(1)手动读写:①按图连线:②将MC单元编程开关置为“编程”档,时序单元状态开关置为“单步”档,ADDR 单元状态开关置为“置数”档③使用ADDR单元的低六位SA5…SA0给出微地址MA5…MA0,微地址可以通过MC 单元的MA5…MA0微地址灯显示④CON单元SD27…SD20,SD17…SD10,SD07…SD00开关上置24位微代码,待写入值由MC单元的M23…M024位LED灯显示⑤启动时序电路(按动一次TS按钮),即将微代码写入到E2PROM2816的相应地址对应单元中⑥重复③④⑤三步,将下图微代码写入2816芯片中二进制代码表(2)联机读写:①将微程序写入文件,联机软件提供了微程序下载功能,以代替手动读写微控制器,但微程序得以指定的格式写入本次试验的微程序如下:://************************************************************// :// // :// 微控器实验指令文件 // :// // ://************************************************************// ://***************Start Of MicroController Data****************//$M 00 000001;NOP$M 01 007070;CON(INS)->IR,P<1>$M 04 002405;R0->A$M 05 04B201;R0->B$M 30 001404;A加B->RO$M 32 183001;IN->R0$M 33 280401;R0->OUT$M 35 000035;NOP;//***************End Of MicroController Data*******************// ②写入微程序用联机软件的“【转存】-【装载数据】”功能将改格式文件装载入试验系统。
微程序控制器实验
得到下一条微指令地址的有关技术
主要包括:
①微程序顺序执行时,下地址为本条微指令地址加1。 ②在微程序必定转向某一微地址时,可以在微指令字中的相关字段中给出该 地址值。 ③按微指令(上一条或本条)的某一执行结果的状态,选择顺序执行或转向某 一地址,此时必须在微指令字中指明需判断的执行结果及转移地址。要判断的 执行结果,可以是运算器的标志位状态,控制器的执行状态,如多次的微指令 循环是否结束,外设是否请求中断等等。 ④微子程序的调用及返回控制,会用到微堆栈。 ⑤依条件判断转向多条微指令地址中的某一地址的控制,它可以是前述第③ 条的更复杂一点的用法,也包括依据取来的机器指令的操作码,找到对应该条 指令的执行过程的一段微程序的入口地址。这后一种情况通常被称为微程序控 制中的功能分支转移。此时在微指令字中直接给出多个下地址是不现实的或不 合理的,应找出更合理的解决方案。
用/VECT信号把通 过水平板上的开关给出 分 别 用 / MAP 的10位微指令的手拨地 控制器的第三 和 / PL两 个信 号 选 址接通到Am2910的D输 个组成成分,是 通 MAPROM 和 微 指 入端。 微程序定序器 与 Am2910 配 套 的 址 字 段 的 输要 包 括 令下地 电 路 , 主 MAPROM和用于形成/CC信号逻辑值的条件 出 送 到 Am2910 的 D Am2910器件及其 判定线路。MAPROM被用作为指令微地址映 输入端,从而形成D 配套电路。 把 CP 接选 1 逻 辑 输入端的3 电源, 射部件,它变换指令的操作码为该指令对应的 把/CCEN接 使微 微程序段入口地址,由两片74LS2716ROM芯 功能。 指 令 地 地,使Am2910的条 址十1总是执 片组成,其地址为指令的操作码,对应单元中 件判断结果只取决于 行。 存放相应微程序段的入口地址,执行读操作, /CC。 并用/MAP选通读出的信息,解决的是指令 功能分支问题。 把Am2910的 /OE端接地,使其 输出Y11一Y0总保 持有效(实用Y9一YO 共10位)。
计算机组成原理微程序控制器组成实验课程实验报告书
学生课程实验报告书13 级计算机与信息科学系软件工程专业 1303 班学号 3138907308 姓名王明渊2014 --2015 学年第 2 学期实验项目:微程序控制器组成实验实验时间:实验原理:(任务)一、实验目的1. 掌握时序产生器的组成原理。
2. 掌握微程序控制器的组成原理。
二、实验电路1. 时序发生器本实验所用的时序电路见图3.4。
电路由一个500KHz晶振、2片GAL22V10、一片74LS390组成,可产生两级等间隔时序信号T1-T4、W1-W3,其中一个W由一轮T1-T4组成,相当于一个微指令周期或硬连线控制器的一拍,而一轮W1-W3可以执行硬连线控制器的一条机器指令。
另外,供数字逻辑实验使用的时钟由MF经一片74LS390分频后产生。
图3.4 时序信号发生器本次实验不涉及硬连线控制器,因此时序发生器中产生W1-W3的部分也可根据需要放到硬连线控制器实验中介绍。
产生时序信号T1-T4的功能集成再图中左边的一片GAL22V10中,另外它还产生节拍信号W1-W3的控制时钟CLK1。
该芯片的逻辑功能用ABEL语言实现。
其源程序如下:MODULE TIMER1TITLE ‘CLOCK GENERATOR T1-T4’CLK = C;“INPUTMF, CLR, QD, DP, TJ, DB PIN 1..6;W3 PIN 7;“OUTPUTT1, T2, T3, T4 PIN 15..18 ISTYPE ‘REG’;CLK1 PIN 14 ISTYPE ‘COM’;QD1, QD2, QDR PIN ISTYPE ‘PEG’;ACT PIN ISTYPE ‘COM’;S = [T1, T2, T3, T4, QD1, QD2, QDR];EQUATIONSQD1 := QD;QD2 := QD1;ACT = QD1 & !QD2;QDR := CLR & QD # CLE & QDR;T1 := CLR & T4 & ACT # CLR & T4 & !(DP # TJ # DB & W3) & QDR;T2 := CLR & T1;T3 := CLR & T2;T4 := !CLR # T3 # T4 & !ACT & (DP # TJ # DB & W3) # !QDR;CLK1 = T1 # !CLR & MF;S.CLK = MF;END节拍电位信号W1-W3只在硬连线控制器中使用,产生W信号的功能集成在右边一片GAL22V10中,用ABEL语言实现。
计算机组成原理部分参考答案 (1)

习题一1.什么是程序存储工作方式?答:计算机的工作方式——存储程序工作方式。
即事先编写程序,再由计算机把这些信息存储起来,然后连续地、快速地执行程序,从而完成各种运算过程。
2.采用数字化方法表示信息有哪些优点?用数字化方法表示信息的优点:(1)抗干扰能力强, 可靠性高。
(2)依靠多位数字的组合,在表示数值时可获得很宽的表示范围以及很高的精度。
(3)数字化的信息可以存储、信息传送也比较容易实现。
(4)可表示的信息类型与范围及其广泛,几乎没有限制。
(5)能用逻辑代数等数字逻辑技术进行信息处理,这就形成了计算机硬件设计的基础。
3.如果有7×9点阵显示出字符A的图像,请用9个七位二进制代码表示A的点阵信息。
4.数字计算机的主要特点是什么?1.(1)能在程序控制下自动连续地工作;(2|)运算速度快;(3)运算精度高;(4)具有很强的信息存储能力;(5)通用性强,应用领域及其广泛。
5.衡量计算机性能的基本指标有哪些?答:衡量计算机性能的基本指标:(1)基本字长——参加一次运算的数的位数;(2)数据通路宽度——数据总线一次能并行传送的位数;(3)运算速度——可用①CPU的时钟频率与主频,②每秒平均执行指令数,③典型四则运算的时间来表示。
(4)主存储器容量——可用字节数或单元数(字数)×位数来表示。
(5)外存容量——常用字节数表示。
(6)配备的外围设备及其性能。
(7)系统软件配置。
7.系统软件一般包括哪些部分?列举你所熟悉的三种系统软件。
系统软件一般包括操作系统,编译程序、解释程序、各种软件平台等。
例如WINDOWS98操作系统,C语言编译程序等,数据库管理系统。
8.对源程序的处理有哪两种基本方式?对源程序的处理通常有两种处理方式:解释方式和编译方式。
习题二1.将二进制数(101010.01)2转换为十进制数及BCD码。
解:(101010.01)2 = (42.25)10 = (01000010.00100101)BCD2.将八近制数(37.2)8转换为十进制数及BCD码.解:(37.2)8 = (31.25)10 =(011001.010101)BCD3.将十六进制熟(AC.E)转换为十进制数及BCD码.解: (AC.E)16 =(174.875)10 = (000101110100.100001110101)BCD4.将十进制数(75.34)10转换为8位二进制数及八进制数、十六进制数。
微程序控制器的工作原理
微程序控制器的工作原理微程序控制器是一种用于控制计算机硬件执行指令的微处理器。
它的工作原理是通过微程序来控制计算机的指令执行流程,实现对计算机硬件的控制和管理。
在本文中,我们将详细介绍微程序控制器的工作原理,包括微程序的概念、微程序控制器的结构和工作过程等内容。
微程序的概念。
微程序是一种用于控制计算机硬件执行指令的低级程序。
它由一系列微指令组成,每条微指令对应计算机硬件的一个控制信号。
微程序的主要作用是实现对计算机硬件的控制和管理,使得计算机能够按照指定的顺序执行指令,从而完成各种计算任务。
微程序控制器的结构。
微程序控制器通常由微指令存储器、微指令译码器、控制逻辑单元和时序逻辑单元等部分组成。
微指令存储器用于存储微程序,微指令译码器用于译码微指令,控制逻辑单元用于生成控制信号,时序逻辑单元用于控制微指令的执行时序。
微程序控制器的工作过程。
微程序控制器的工作过程通常包括指令译码、控制信号生成和执行时序控制三个阶段。
在指令译码阶段,微程序控制器从存储器中读取当前指令对应的微指令,并将其送入微指令译码器进行译码。
译码后的微指令包括一系列控制信号,用于控制计算机硬件执行指令。
在控制信号生成阶段,控制逻辑单元根据译码后的微指令生成相应的控制信号,用于控制计算机硬件的执行。
在执行时序控制阶段,时序逻辑单元根据微指令的执行时序控制计算机硬件的执行顺序,确保指令能够按照正确的顺序执行。
总结。
微程序控制器通过微程序来控制计算机硬件执行指令,实现对计算机的控制和管理。
它的工作原理是通过微程序控制计算机硬件的执行流程,包括指令译码、控制信号生成和执行时序控制三个阶段。
微程序控制器的结构包括微指令存储器、微指令译码器、控制逻辑单元和时序逻辑单元等部分。
通过这些部分的协同工作,微程序控制器能够实现对计算机硬件的精确控制,从而实现各种计算任务的执行。
计算机组成原理实验 2.4 微程序控制器实验
DB 00000000B
DB 00000000B
DB 00000000B
DB 00000000B
DB 00000000B
DB 00000000B
DB 00000000B
DB 00000000B
DB 00000000B
DB 00000000B
DB 00000000B
END
END
END
问题:在写入控制存储器的微指令代码表中,地址[00001]和[00010]
【T2】BUS PC
【T2】BUSPC
【T2】
00000 00001
00001
?
【T1】PCAR,ROMBUS 【T1】
【T2】BUS PC
【T2】
00000
?
【T1】
【T2】
微程序控制器 结构示意图
指令寄存器 IR
OP码
状态条件
…
地址译码
控制存储器
微地址寄存器
地址转移 逻辑
微指令 寄存器
P字段
微操作信号
NOP
ROMIR
HLT
ROMIR
JMP1
ROMIR
JMP2
ROMIR
执行周期
停机
ROMPC
ROMPC
ROMPC
有效的微操作信号
功能
指令流 T1
#OE, AR_CLK(LDAR)
PCAR, ROMBUS
ROMIR T2 #OE, IR_CLK (LDIR), PC_CLK (PC_INC) BUSIR, PC+1
实验步骤(JMP1/JMP2指令):
1) 根据微指令代码表编写下列微程序,编译并生成三个HEX文 件,分别烧写到控制存储器EPROM1、EPROM2及EPROM3(切 记勿写错存储器!)。
计算机组成原理微程序控制器部件教学实验

计算机组成原理微程序控制器部件教学实验微程序控制器是由微指令组成的,每个微指令对应一个操作或一个操作序列。
它通过微指令来描述指令的执行过程,包括指令的取指,指令的解码,操作数的获取,以及操作的执行。
微程序控制器的本质是一个状态机,通过不同的状态和状态转移来完成指令的执行,从而实现计算机的功能。
在计算机组成原理的教学实验中,微程序控制器部件是非常重要的一个实验内容。
通过搭建微程序控制器的实验平台,学生可以更好地理解计算机指令的执行过程,加深对计算机硬件的认识。
在微程序控制器部件的教学实验中,可以从以下几个方面展开。
1.搭建实验平台:首先需要搭建一个微程序控制器的实验平台,包括微指令存储器、微指令控制器、状态寄存器等硬件部件。
同时需要编写相应的微指令和微程序,对不同的指令进行模拟执行。
2.模拟指令的执行过程:通过编写微指令和微程序,可以模拟指令的执行过程。
通过手动设置各个硬件部件的状态,可以观察指令的取指、解码、执行等过程。
通过模拟执行不同的指令,可以帮助学生理解指令的执行过程和计算机的工作原理。
3.分析指令的执行效率:在实验中,可以通过不同的指令和微程序,分析指令的执行效率。
比如,可以比较不同指令的执行时间,找出其中的瓶颈和优化方法。
通过实验分析,学生可以深入理解指令的执行原理和计算机硬件的优化方法。
4.扩展实验内容:在熟悉了微程序控制器的基本原理后,可以进一步扩展实验内容。
比如,可以设计一个简单的指令集,编写相应的微指令和微程序,实现更复杂的指令的执行过程。
通过扩展实验内容,可以更好地理解微程序控制器部件的原理和功能。
总之,计算机组成原理微程序控制器部件的教学实验是一门重要的实践课程,通过搭建实验平台和编写微指令和微程序,可以帮助学生更好地理解计算机硬件的工作原理,加深对计算机指令执行过程的认识,提高计算机组成原理的学习效果。
实验1: 运算器组成实验 ----微程序控制器方式
河北环境工程学院《计算机组成原理》实验报告作者:系(部):专业班级:学号:成绩:__________________评阅教师:__________________年月日一、实验目的⑴熟悉逻辑测试笔的使用方法⑵熟悉 TEC-8 模型计算机的节拍脉冲 T1、T2、T3⑶熟悉双端口通用寄存器组的读写操作⑷熟悉运算器的数据传送通路⑸验证 74LS181 的加、减、与、或功能⑹按给定的数据,完成几种指定的算术、逻辑运算运算二、预习内容1.什么是机器字长?2.4位操作码可包含多少条指令?3.预习实验指导书相关内容,熟悉实验步骤。
4.复习本次实验所用的各种数字集成电路的性能及工作原理三、实验环境及主要器件1.TEC-8实验系统 1台2. 逻辑测试笔 1台3. 双踪示波器 1台4. 直流万用表 1台四、实验内容1、用逻辑测试笔测试节拍脉冲信号T1、T2、T3。
2、对下述7组数据进行加、减、与或运算五、实验步骤1.实验准备将控制器转换开关拨到微程序位臵,将编程开关设臵为正常位鉻,将开关D拨到向上位臵。
打开电源2.用逻辑测试笔测试节拍脉冲信号T1、T2、T3(1)将逻輯测试笔的一端插入TBC-8实验台上的,逻辑测试笔上面的插孔中,另端插入,T1上方的插孔中(2)按复位按钮CLR,使时序信号发生器复位(3)按一次逻辑测试笔枢内的Reset按钮,使逻辑測试笔上的脉冲计数器复位,2个黄灯D1、D0均灭(4)按一次启动按钮QD,这时指示灯D1、D0的状态应为01B,指示产生了一个T1脉冲;如果再按一次QD按钮,则指示灯D1、D0的状态应当为10B,表示又产生了一个T1脉冲;继续按Q按钮,可以看到在单周期运行方式下,每按一次QD按钮,就产生一个T1脉冲(5)用同样的方法测试T2、T33.进行加、减、与、或实验(1)设臵加、减、与、或实验模式按复位按钮CLR,使TEC-8实验系统复位。
指示灯μA5~μA0显示00H。
将操作模式开关设臵为SWC=1、SWB=0、SWA=1,准备进入加、减、与或实验。
计算机组成原理实验报告-微程序控制器

01
0 0 0 0 0 0 0 1 1
1 1 0
1 1 0
1 1 0
0 0 0 0 1 0
02
0 0 0 0 0 0 0 0 1
1 0 0
0 0 0
0 0 1
0 0 1 0 0 0
03
0 0 0 0 0 0 0 0 1
1 1 0
0 0 0
0 0 0
0 0 0 1 0 0
04
0 0 0 0 0 0 0 0 1
0 0 1 1 1 1
17
0 0 0 0 0 0 0 0 1
0 1 0
0 0 0
0 0 0
0 1 0 1 0 1
20
0 0 0 0 0 0 0 1 1
1 1 0
1 1 0
1 1 0
0 1 0 0 1 0
21
0 0 0 0 0 0 0 1 1
1 1 0
1 1 0
1 1 0
0 1 0 1 0 0
22
0 0 0 0 0 0 0 0 1
(2)读微指令。
(3)产生微操作命令。
(4)形成下一条微指令地址。
(5)取下一条微指令。…………重复(1)~(4)过程,直到该机器指令送入IR为止。
2、执行阶段Βιβλιοθήκη (1)当指令存入IR后,由指令的OP部分送到微地址形成部件,形成该指令对应的微程序的首地址。
(2)读出微指令。
(3)产生微操作命令。
(4)形成下一条微指令地址。…………重复(1)~(4)过程,直到该机器指令执行完为止。
2、微指令寄存器:微指令寄存器(CMIR)存放由控制存储器读出的一条微指令信息
3、微地址寄存器(CMAR):存放将要访问的下一条微指令的微地址。
计算机组成原理微程序控制器实验报告
计算机组成原理实验报告三:微程序控制器实验2011-05-06 01:00:09|分类:实验报告| 标签:实验微程序字段微指令信号|字号大中小订阅实验三:微程序控制器实验一、实验目的与要求:实验目的:1、掌握时序产生器的原理和具体操作。
2、掌握微程序控制器的功能、组成知识。
3、掌握微程序的编制、写入、观察微程序的运行,学习基本指令的执行流程。
要求:做好实验预习,掌握进位控制运算器的原理。
实验之前,应认真准备,写出实验步骤和具体分析内容,否则实验效率会特别低,一次实验时间根本无法完成实验任务,即使基本做对了,也很难说学懂了些什么重要教学内容。
二、实验方案:【1】、连接好实验线路,检查无误后接通电源。
【2】、编程:(1)将编程开关(MJ20)置为PROM(编程)状态;(2)将STATE UNIT中的STEP置为"STEP"状态,STOP置为"RUN"状态;(3)在UA5-UA0开关上置要写的某个微地址(八进制);(4)在MK24-MK1开关上置要写的微地址相应的24位微代码,24位开关对应24位显示灯,开关量为"1"灯亮,为"0"灯灭;(5)启动时序电路(按动启动按钮START),即将微代码写入到E2PROM2816的相应地址对应的单元中;(6)重复(3)~(5)步骤将每一条微指令写入E2PROM2816。
【3】、校验:(1)将编程开关置为READ状态;(2)将STEP开关置为"STEP"状态,STOP开关置为"RUN"状态;(3)在开关UA5~UA0上置好要读的某个微地址;(4)按动START键,启动时序电路,观察显示灯MD24-MD1的状态,检查读出的微代码是否已写入的相同。
如果不同在将开关置于PROM编程状态,重新执行编程步骤;(5)重复(3)、(4)步骤将每一条微指令从E2PROM2816中读出。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5.4.5 CPU周期与微指令周期
的关系
➢ 【分析】
一个CPU周期为0.8μs,它包含四个等间隔 的节拍脉冲T1—T4,每个脉冲宽度为200ns。 用T4作为读取微指令的时间,用T1+T2+T3时 间作为执行微指令的时间。例如,在前600ns 时间内运算器进行运算,在600ns时间的末尾 运算器已经运算完毕,可用T4上升沿将运算结 果打入某个寄存器。与此同时可用T4间隔读取 下条微指令,经200ns时间延迟,下条微指令 又从只读存储器读出,并用T1上升沿打入到微 指令寄存器。
➢ 微操作
▪ 执行部件接受微命令后所进行的操作。
➢ 控制部件与执行部件通过控制线和反馈 信息进行联系。
上一页 返回 下一页
5.4.2 微指令和微程序
➢ 微指令
▪ 在机器的一个CPU周期中,一组实现一定操 作功能的微命令的组合。
➢ 微程序
▪ 实现一条机器指令功能的许多条微指令组成 的序列。
➢ 控制部件与执行部件通过控制线和反馈 信息进行联系。
上一页 返回 下一页
5.4.6 机器指令与微指令的关系
➢ 【例2】
设某计算机运算器框图如图(a)所示,其中 ALU为16位的加法器(高电平工作),SA,SB为16 位暂存器。4个通用寄存器由D触发器组成,Q 端输出,其读、写控制功能见下表。
上一页 返回 下一页
5.4.6 机器指令与微指令的关系
读控制
存器的内容,并按改好的内容去读下一条微指
令。地址转移逻辑就承担自动完成修改微地址
的任务。
上一页 返回 下一页
5.4.4 微程序举例
➢ 我们举“十进制加法”指令为例,具体 看一看微程序控制的过程。
➢ 第一条微指令的二进制编码是
000 000 000 000 11111
10 0000
上一页 返回 下一页
5.4.4 微程序举例
➢ 第二条微指令的二进制编码是
010 100 100 100 00000
00 1001
➢ 第三条微指令的二进制编码是
010 001 001 100 00000
01 0000
➢ 第四条微指令的二进制编码是
010 001 001 001 00000
00 0000
上一页 返回 下一页
写控制Βιβλιοθήκη R RA0 RA1 选择1
0
0
R0
W WA0 WA1 选择
1
0
0
R0
1
0
1
R1
1
0
1
R1
1
1
0
R2
1
1
0
R2
1
1
1
R3
1
1
1
R3
0
*
* 不读 出
**
* 不写 入
上一页 返回 下一页
5.4.6 机器指令与微指令的关系
上一页 返回 下一页
5.4.5 CPU周期与微指令周期 的关系
➢ 在串行方式的微程序控制器中: 微指令周期 = 读出微指令的时间 + 执行该条微指令的时间
➢ 下图示出了某小型机中CPU周期与微指 令周期的时间关系:
上一页 返回 下一页
5.4.5 CPU周期与微指令周期 的关系
图5.2 CPU周期与微指令周期的关系 上一页 返回 下一页
上一页 返回 下一页
5.4.5 CPU周期与微指令周期 的关系
如忽略触发器的翻转延迟,那么下条微指令的 微命令信号就从T1上升沿起就开始有效,直到 下一条微指令读出后打入微指令寄存器为止。 因此一条微指令的保持时间恰好是0.8μs,也 就是一个CPU
上一页 返回 下一页
5.4.6 机器指令与微指令的关系
➢ 3.地址转移逻辑
在一般情况下,微指令由控制存储器读出后 直接给出下一条微指令的地址,通常我们简称
微地址,这个微地址信息就存放在微地址寄存 器中。如果微程序不出现分支,那么下一条微
指令的地址就直接由微地址寄存器给出。当微
程序出现分支时,意味着微程序出现条件转移。 在这种情况下,通过判别测试字段P和执行部 件的“状态条件”反馈信息,去修改微地址寄
读出周期要短。
上一页 返回 下一页
5.4.3 微程序控制器原理框图
➢ 2.微指令寄存器
▪ 微指令寄存器用来存放由控制存储器读出的 一条微指令信息。其中微地址寄存器决定将 要访问的下一条微指令的地址,而微命令寄 存器则保存一条微指令的操作控制字段和判 别测试字段的信息。
上一页 返回 下一页
5.4.3 微程序控制器原理框图
上一页 返回 下一页
5.4.3 微程序控制器原理框图
➢ 微程序控制器主要由控制存储器、微指 令寄存器和地址转移逻辑三大部分组成。
➢ 1.控制存储器
上一页 返回 下一页
5.4.3 微程序控制器原理框图
控制存储器用来存放实现全部指令系统的微
程序,它是一种只读存储器。一旦微程序固化,
机器运行时则只读不写。其工作过程是:每读
出一条微指令,则执行这条微指令;接着又读
出下一条微指令,又执行这一条微指令……。
读出一条微指令并执 行微指令的时间总和称为
一个微指令周期。通常,在串行方式的微程序
控制器中,微指令周期就是只读存储器的工作
周期。控制存储器的字长就是微指令字的长度,
其存储容量视机器指令系统而定,即取决于微
程序的数量。对控制存储器的要求是速度快,
5.4.6 机器指令与微指令的关系
▪ 2、从指令与微指令,程序与微程序,地址 与微地址的一一对应关系来看,前者与内存 储器有关,后者与控制存储器有关。
上一页 返回 下一页
5.4.6 机器指令与微指令的关系
▪ 3、我们在讲述本章5.2节时,曾讲述了指令 与机器周期概念,并归纳了五条典型指令的 指令周期,并演示了这五条指令的微程序流 程图,每一个CPU周期就对应一条微指令。 这就告诉我们如何设计微程序,也将使我们 进一步体验到机器指令与微指令的关系。
➢ 【问】
一会儿取机器指令,一会儿取微指令,它 们之间到底是什么关系?
➢ 【解】
▪ 1、一条机器指令对应一个微程序,这个微 程序是由若干条微指令序列组成的。因此, 一条机器指令的功能是由若干条微指令组成 的序列来实现的。简言之,一条机器指令所 完成的 操作划分成若干条微指令来完成,
上一页 返回 下一页
5.4 微程序控制器
➢5.4.1 微命令和微操作 ➢5.4.2 微指令和微程序 ➢5.4.3 微程序控制器原理框图 ➢5.4.4 微程序举例 ➢5.4.5 CPU周期与微指令周期的关系 ➢5.4.6 机器指令与微指令的关系
上一页 返回 下一页
5.4.1 微命令和微操作
➢ 微命令
▪ 控制部件通过控制线向执行部件发出的各种 控制命令。