计算机图形学第4章图形变换3
计算机图形学第4章图形变换
反射变换
总结词
反射变换是将图形关于某一平面进行镜像反射的变换。
详细描述
反射变换可以通过指定一个法向量和反射平面来实现。法向量垂直于反射平面,指向反射方向。在二 维空间中,反射变换可以将图形关于x轴或y轴进行镜像反射;在三维空间中,反射变换可以将图形关 于某一平面进行镜像反射。
03
复合图形变换
组合变换
01
02
03
04
组合变换是指将多个基本图形 变换组合在一起,形成一个复
杂的变换过程。
组合变换可以通过将多个变换 矩阵相乘来实现,最终得到一
个复合变换矩阵。
组合变换可以应用于各种图形 变换场景,如旋转、缩放、平
移、倾斜等。
组合变换需要注意变换的顺序 和矩阵的乘法顺序,不同的顺 序可能导致不同的变换结果。
矩阵变换
矩阵变换是指通过矩阵运算对图形进 行变换的方法。
常见的矩阵变换包括平移矩阵、旋转 矩阵、缩放矩阵和倾斜矩阵等。
矩阵变换可以通过将变换矩阵与图形 顶点坐标相乘来实现,得到变换后的 新坐标。
矩阵变换具有数学表达式的简洁性和 可操作性,是计算机图形学中常用的 图形变换方法之一。
仿射变换
仿射变换是指保持图形中点与 点之间的线性关系不变的变换。
05
应用实例
游戏中的图形变换
角色动画
通过图形变换技术,游戏中的角 色可以完成各种复杂的动作,如
跑、跳、攻击等。
场景变换
游戏中的场景可以通过图形变换 技术实现动态的缩放、旋转和平 移,为玩家提供更加丰富的视觉
体验。
特效制作
图形变换技术还可以用于制作游 戏中的特效,如爆炸、火焰、水
流等,提升游戏的视觉效果。
THANKS
计算机图形学 第4章 图形变换

=
s x1 s x 2 0 0
0 s y1 s y 2 0
0 0 1
(3) 复合旋转。
cos 1 sin 1 0 cos 2 sin 2 Tr Tr1 ·r 2 sin 1 cos 1 0 sin 2 cos 2 T 0 0 1 0 0 cos(1 2 ) sin(1 2 ) 0 sin(1 2 ) cos(1 2 ) 0 0 0 1
4.对称变换 设图形上的点P(x, y)在x轴和y轴方向分别作变换,结 果生成新的点坐标P‘(x’, y‘),则
x ax by y dx ey
用齐次坐标和矩阵形式可表示为
a d 0 x y 1 x y 1 b e 0 [ax by dx ey 1] 0 0 1 a d 0
y dx y
用齐次坐标和矩阵表示为
1 d 0 [x' y' 1] = [x y 1]· =[x +by dx +y 1] b 1 0 0 0 1
错切变换矩阵为 K2 =
1 d 0 b 1 0 0 0 1
错切变换如图4-7所示。
图4-2 窗口与视图变换
4.2 图形的几何变换
图形变换一般是指对图形的几何信息经过几何变 换后产生新的图形。图形变换既可以看做是坐标系不 动而图形变动,变动后的图形在坐标系中的坐标值发 生变化;也可以看做图形不动而坐标系变动,变动后 该图形在新的坐标系下具有新的坐标值,本节所讨论 的几何变换属于前一种。 对于图形采用齐次坐标表示,可以方便地用变换 矩阵实现对图形的变换。假设二维图形变换前的一点 坐标为[x y 1],变换后为[x' y' 1];三维图形变换前的 一点坐标为[x y z 1],变换后为[x' y' z' 1]。
计算机图形学之图形变换
4 T
3
2 p
1
0
012 34 567 8
线段和多边形的平移可以通过顶点的
平移来实现。同样线段和多边形的其它几 何变换也可以通过对顶点的几何变换来实 现。
2. 旋转变换(Rotation) 二维旋转有两个参数:
旋转中心: 旋转角:
?
6 P’
5
4
3
P
2
1
0
012 34 567 8
设OP与x轴的夹角为 则:
由于采用齐次坐标矩阵表示几何变换, 多个变换的序列相应地可以用矩阵链乘来表 示。
需要注意:先作用的变换其矩阵在右边, 后作用的变换其矩阵在左边。
变换函数
平移变换 void glTanslate{fd}(TYPE x, TYPE y, TYPE z);
旋转变换 void glRotate{fd}(TYPE angle, TYPE x, TYPE y, TYPE z); 绕矢量v=(x,y,z)T逆时针方向旋转angle指定的角度。 旋转角度的范围是0~360度。当angle=0时, glRotate()不起作用。
二维旋转有两个参数: 旋转中心: 旋转角:
上述变换可以分解为三个基本变换:
•平移:
•旋转:
•平移: 回原位。
使旋转中心移到坐标原点; 使旋转中心再移
二维旋转有两个参数: 旋转中心: 旋转角:
因此上述变换可以写成矩阵乘积形式:
4. 5 基本三维几何变换(Basic three-dimensional geometric transformation)
1. 矩阵表示(Matrix representation) 前面三种变换都可以表示为如下的矩
阵形式
第4章二维变换

• 性质
U •V = V •U U •V = 0 ⇔ U ⊥ V U •U = 0 ⇔ U = 0
变换的数学基础(3/4) 变换的数学基础
– 矢量的长度
• 单位矢量 • 矢量的夹角
2 U = U • U = u x + u y + u z2 2
U •V cos θ = U •V
– 矢量的叉积
i U ×V = ux vx
– 在世界坐标系( 在世界坐标系(WCS)中指定的矩形区域 , ) 用来指定要显示的图形 。
2. 视区
– 在设备坐标系(屏幕或绘图纸) 在设备坐标系(屏幕或绘图纸)上指定的矩形区域 , 用来指定窗口内的图形在屏幕上显示的大小及位置。 用来指定窗口内的图形在屏幕上显示的大小及位置。
3. 窗口到视区的变换
P′=P+Tm 等价于
[x’ y’]=[x y] +[Mx My]
图形变换的特点( 4.3.1 图形变换的特点(续)
比例变换 P′=P×Ts
Sx 0 Ts= 0 Sy Sx、Sy分别表示比例因子。 cosθ sinθ Tr= -sinθ cosθ θ>0时为逆时针旋转 θ<0时为顺时针旋转
旋转变换 P'=P×Tr
变换后的 顶点坐标
P
变换前的 顶点坐标
•
T2D
二维变换矩阵
二维变换矩阵中: a b 是对图形进行缩放、旋转、对称、错切等变换。 c d [ l m] 是对图形进行平移变换
• 计算机图形场景中所有图形对象的空间定位和定义,包括观 计算机图形场景中所有图形对象的空间定位和定义, 察者的位置视线等,是其它坐标系的参照。 察者的位置视线等,是其它坐标系的参照。
2.模型坐标系(Modeling Coordinate System,也称局部坐标系) 模型坐标系
计算机图形学 7图形变换ppt课件
然后实行对称变换:
最后,把坐标恢复至原坐标原点(0,0,0)处,即做逆 变换为:
所以,最后所得齐次坐标的表达式为:
第四节 投影变换
将三维坐标的几何体变换成二维表示的图形就是投影 变换。 投影:将n维的点变换成小于n维的点。 注:以下所讲的概念均是指在三维空间中。 在三维空间中,选择一个点,可称该点为投影中心,不经 过该点再定义一个平面,称该平面为投影面,从投影中心 向投影面引出任意条射线,称这些射线为投影线,穿过物 体的投影线将于投影面相交,在投影面上形成物体的像, 称这个像为三维物体在二维投影面上的投影。 根据投影中心与投影平面之间的距离不同,投影可分 为平行投影和透视投影。平行投影的投影中心与投影平面 之间的距离为无穷大,而对透视投影,该距离是有限的。 投影可分为以下几类:
1.平行投影 平行投影根据投影方向与投影面的夹角分为两类, 即正投影与斜投影,当投影方向垂直与投影平面 时称为正投影,否则为斜投影。如下图:
(1)正投影与三视图 通常所说的三视图(正视图、俯视图、侧视图)均是正投 影
三视图的生成就是把x,y,z坐标系下的形体投影到z=0 的 平面,变换到u,v,w坐标系。一般情况下还需要将三 个 视图在一个平面上画出。 1)将一个点(X,Y,Z)变成XOZ平面上的投影点(X, 0,Z),得到主视图。
中心思想是先用折线生成圆弧或椭圆弧,然后再对折线进 行变换。此时要考虑: (i)原来逼近的误差在变换后的变化; 简单说明一下变换前后的误差关系。 (ii)折线的段数越多,变换折线的计算量就越大
2)利用“先变换,再生成”的方法变换圆弧、椭圆弧
由解析几何知识可知,椭圆在线形变换下仍为椭圆,而 且中心仍为中心。
此外,我们还可以相对于某一点或某一直线进行对称, 其方法是:先进行适当的平移、旋转再进行平移变换。 例:写出相对于X=Xa,Z=Za进行对称的变换。 解:进行对称变换的对称轴是一条平行于y轴的直线,利 用复合变换则有: 首先:把坐标原点移到点( Xa ,0, Za )则变换矩阵为:
9-10讲 第4章 变换-几何变换及投影

当a≠c时,即x 方向的变化与y方向的变化不同时, ≠ 时 方向的变化与 方向的变化不同时, 方向的变化不同时 视图中的图形会有伸缩变化,图形变形。 视图中的图形会有伸缩变化,图形变形。 当 a=c=1, b=d=0则 Xv=Xw,Yv=Yw, 图形完全相同 。 , 则 = , = , 图形完全相同。
14
4.2.3 窗口区和视图区的坐标变换
2. 变换过程 窗口-视图二维变换 窗口 视图二维变换
从应用程序得到 图形的用户坐标 对窗口区域 进行裁剪 窗口至视 区的变换 显示或 绘图
窗口-视图三维变换 窗口 视图三维变换
从应用程序得到图 形的三维用户坐标 投影 对窗口区 域裁剪 窗口至视 区的变换 显示或 绘图
16
4.3.1 齐次坐标
齐次坐标表示法: 维向量表示一个n维向量 齐次坐标表示法 用n+1维向量表示一个 维向量 维向量表示一个 (x,y)点对应的齐次坐标为 其中x 问题1:点对应的齐次坐标为(x 空间中的一点, 非齐次坐标表示方式唯一吗? 问题 点对应的齐次坐标为 h,yh,h), 其中 h=hx, yh=hy, 空间中的一点 非齐次坐标表示方式唯一吗 h≠0. 因此,普通坐标与齐次坐标的关系为“一对多” ? 因此,,(x,y)点对应的齐次坐标为三维空间的一条直 问题2: 空间中的一点 其齐次坐标表示方式唯一吗 问题 普通坐标与齐次坐标的关系为“一对多” 这样, 这样 空间中的一点, 其齐次坐标表示方式唯一吗? 点对应的齐次坐标为三维空间的一条直
y2 z2
5
4.1 变换的数学基础
4.1.2 矩阵基础知识
矩阵的加法运算 数乘矩阵 矩阵的乘法运算 零矩阵运算 单位矩阵 矩阵逆运算 转置运算 矩阵的基本性质
计算机图形学 图形变换ppt课件
2
变换的数学基础(2/4)
矢量的数乘
ku x k U ku y ku z
矢量的点积
U V u v u v u v x x y y z z
性质
U V V U
U V 0 U V
U U 0 U 0
北大计算机系多媒体与人机交互
北大计算机系多媒体与人机交互
10
齐次坐标与二维变换的矩阵表示(3/4)
标准齐次坐标(x,y,1) 二维变换的矩阵表示
平移变换
x 1 0 t x x x 记为 T y 0 1 t y ( t , t ) y y x y 1 0 0 1 1 1
14
复合变换及变换的模式(3/6)
变换的结果与变换的顺序有关(矩阵乘 法不可交换)
Translate2D(1,0); Rotate2D(45); House(); Rotate2D(45); Translate2D(1,0); House();
北大计算机系多媒体与人机交互
15
复合变换及变换的模式(4/6)
变换具有统一表示形式的优点
便于变换合成 便于硬件实现
北大计算机系多媒体与人机交互
12
复合变换及变换的模式(1/6)
问题:如何实现复杂变换?
变换分解 变换合成
P x r( r,y r)
关于任意参照点
的旋转变换
R ( x , y ; ) T ( x , y ) R ( ) T ( x , y ) r r r r r r
关于y轴的对称变换
1 0 0 SYy 0 1 0 0 sin y sin cos 1 0 0 0 x x 记为 R 0 y ( ) y 1 1 1
计算机图形学变换和裁剪PPT课件

k a11
k A k a21
k k
a3 1 a4 1
k a12 k a22 k a32 k a42
k a13 k a23 k a33 k a43
k a14 k a24
k k
aa3444
(3)矩阵的乘法
矩阵A的列数和矩阵B的行数相同时可以相乘.设A为
m*n矩阵,B为n*p矩阵,c为乘积矩阵,则c为m*p阶
UU U
8
4.1.2 矢量-矢量的点乘
(5)矢量的点乘
矢量 U和 的V 点乘表示为 。UV定义如下:
U Vuxvxuyvyuzvz
夹角的余弦定义如下: cos UV
Uห้องสมุดไป่ตู้
U V
θ
点乘的几何意义如图4.3所示
V
图4.3 U·V即U在V上的投影乘
以V的模
由以上可得点乘的如下性质: U V0 U V
也就是说两个互相垂直的矢量(一般称为矢量正交) 的点乘为0。
24
2.放大和缩小变换
设点(x, y, z)经缩放变换后得点 (x,y,z)。两点坐标间的关系
为
x sx x
y sy y
z sz z
其中sx,sy和sz 分别为沿x, y和z轴方向
放缩的比例。
其矩阵形式是
x sx 0 0x
y
0
sy
0 y
z 0 0 sz z
(4.3)
25
以图形中心为中心的缩放
红色为新坐标系ouvw31则axayaz为z轴方向不必变换坐标系ow轴的指向和axayaz的指向一致ou轴可取在经过o点并和ow轴垂直的任一直线上则ow轴方向的单位向量为绕过原点的轴旋转的具体计算32从坐标系oxyz至坐标系ouvw的变换为由于向量uvw是互相正交的单位向量可知矩阵a的逆矩阵就是a的转臵矩阵a33231332221231211133变换公式由以上各式可得变换公式为
计算机图形学 变换

y
相对于原点的比例变换
(2-3)
重心
矩阵形式
x
y x
S x y 0
0 (2-4) Sy
相对于重心的比例变换
x
• 比例变换的性质
当 Sx S y 时,变换前的图形与变换后的图形相似 当 S x S y 1 时,图形将放大,并远离坐标原点 当 0 Sx S y 1 时,图形将缩小,并靠近坐标原点 当 Sx S y 时,图形将发生畸变
2.1.3 用户坐标系统 用户坐标系统即为用户所使用的坐标系统,一 般用户坐标系统均为迪卡尔坐标系。其坐标系 统、使用范围与屏幕坐标系统不同,需要进行 两坐标系统之间的坐标变换。
0,0 yuma x
屏幕坐标系 xdmax
0,0
xumax
ydmax
用户坐标系
Copyright
其变换公式为: xscal = (xdmax-xdmin)/(xumax-xumin) yscal = (ydmax-ydmin)/(yumax-yumin) 工程图纸中任意点(x,y)在屏幕上的坐标为: xd = (x-xumin) * xscal yd = ydmax-(y-yumin)*yscal xdmax,xdmin 为显示器横向的最大、最小像素点 ydmax,ydmin为显示器纵向的最大、最小像素点 xumax,xumin为用户坐标横向的最大、最小值 yumax,yumin为用户坐标纵向的最大、最小值
ty 的作用是对点的坐标进行投影变换
5.基本几何变换的齐次坐标表示 • 平移变换
x
y 1 x
1 y 1 0 Tx
0 1 Ty
第四章 图形变换

复合变换Байду номын сангаас
我们需要对一个图形对象进行复杂的变换时。 并不直接去计算这个变换,而是将其分解成多 个基本变换,再依次用它们作用于图形。 变换合成时,矩阵相乘的顺序是:先作用的变 换放在连乘式的右端,后作用的变换放在连乘 式的左端,由于矩阵乘法不满足交换率,只有 在特殊情况下,矩阵的顺序才可交换。
19
复合变换
记其变换矩阵为R(xr, yr;),则:
R(x r , yr ; ) T(x r , yr ) R() T(x r ,yr ) 1 0 x r cos sin 0 1 0 x r sin cos 0 0 1 y 0 1 y r r 0 1 0 0 1 0 0 0 1 cos sin x r (1 cos) y r sin sin cos y ( 1 cos ) x sin r r 0 1 0
20
复合变换
关于任意参照点Pr(xr, yr)的放缩变换
◦ 关于Pr点放缩(sx, sy)通过下面三个基本变换来实现 :
平移使Pr点落于坐标原点,变换矩阵T(-xr, -yr) 。 放缩(sx, sy),变换矩阵为S(sx, sy). 平移使位于原点的Pr点返回原位臵,变换矩阵为T(xr,yr)。
3
变换的数学基础
矢量
◦ n元组,对应n维空间中的一个点,代表物 体在空间中的位臵或者运动的状态。 ◦ 三维矢量。 ◦ 矢量运算
矢量和 矢量的数乘 矢量的点积 矢量的长度(模) 矢量的叉积
4
变换的数学基础
矢量运算
u x v x u x v x k u x , V v ;U V u v ; k U k u U u y y y y y u z v z u z v z k u z
计算机图形学(第四章图形变换与输出)

3
2
1
2
1
3
1
0 1 2 3 4 5 6 7 8 9 10 x
第二十三页,编辑于星期五:二十点 三十六分。
平 移(三维)
点(x′,y′,z′)由点(x, y, z)在x, y和z轴方向分别移动距离Δx, Δy 和Δz得到。两点坐标间的关系为
x′=x+Δx
y′=y+Δy (4.1)
z′=z+Δz 其矩阵形式为
z sin 0 cos z
和
x 1 0
0 x
y0 cos siny
z 0 sin cos z
第二十九页,编辑于星期五:二十点 三十六分。
如果旋转所绕的轴不是坐标轴,而是一根任意 轴,则变换过程变显得较复杂。
解决方法: 首先,对物体作平移和绕轴旋转变换,使得所 绕之轴与某一根标准坐标轴重合。然后,绕该标 准坐标轴作所需角度的旋转。最后,通过逆变换 使所绕之轴恢复到原来位置。这个过程须由7个基 本变换的级联才能完成。
视区:在屏幕或绘图纸上定义一个矩形,称为视区,
也称为视口,窗口内的景物在视区中显示。
第四页,编辑于星期五:二十点 三十六分。
近平面 视点
远平面
Z
X
投影平面
V′
U′
窗口
X′
Y′
Y
屏 视口 幕
视见体.窗口和视口
三维图形的显示流程图
第五页,编辑于星期五:二十点 三十六分。
4.1 图形的几何变换
基本的几何变换研究物体坐标在直角坐标 系统内的平移、旋转和变比的规律,按照坐 标的维数不同,基本变换可分为: • 二维几何变换 • 三维几何变换
Tx
X
第二十一页,编辑于星期五:二十点 三十六分。
计算机图形学习题参考答案(完整版)
计算机图形学习题参考答案第1章绪论1、第一届ACM SIGGRAPH会议是哪一年在哪里召开的?解:1974年,在Colorado大学召开了第一届SIGGRAPH年会。
2、计算机图形学之父是谁?解:Sutherland3、列举一些计算机图形学的应用领域(至少5个)。
解:计算机辅助设计、图示图形学、计算机艺术、娱乐、教学与培训、可视化、图像处理、图形用户界面等。
4、简要介绍计算机图形学的研究内容。
解:(1)图形的输入。
如何开发和利用图形输入设备及相关软件把图形输入到计算机中,以便进行各种处理。
(2)图形的处理。
包括对图形进行变换(如几何变换、投影变换)和运算(如图形的并、交、差运算)等处理。
(3)图形的生成和输出。
如何将图形的特定表示形式转换成图形输出系统便于接受的表示形式,并将图形在显示器或打印机等输出设备上输出。
5、简要说明计算机图形学与相关学科的关系。
解:与计算机图形学密切相关的学科主要有图像处理、计算几何、计算机视觉和模式识别等。
计算机图形学着重讨论怎样将数据模型变成数字图像。
图像处理着重研究图像的压缩存储和去除噪音等问题。
模式识别重点讨论如何从图像中提取数据和模型。
计算几何着重研究数据模型的建立、存储和管理。
随着技术的发展和应用的深入,这些学科的界限变得模糊起来,各学科相互渗透、融合。
一个较完善的应用系统通常综合利用了各个学科的技术。
6、简要介绍几种计算机图形学的相关开发技术。
解:(1)OpenGL。
OpenGL是一套三维图形处理库,也是该领域事实上的工业标准。
OpenGL独立于硬件、操作系统和窗口系统,能运行于不同操作系统的各种计算机,并能在网络环境下以客户/服务器模式工作,是专业图形处理、科学计算等高端应用领域的标准图形库。
以OpenGL为基础开发的应用程序可以十分方便地在各种平台间移植;OpenGL与C/C++紧密接合,便于实现图形的相关算法,并可保证算法的正确性和可靠性;OpenGL使用简便,效率高。
计算机图形学2010_06三维图形变换
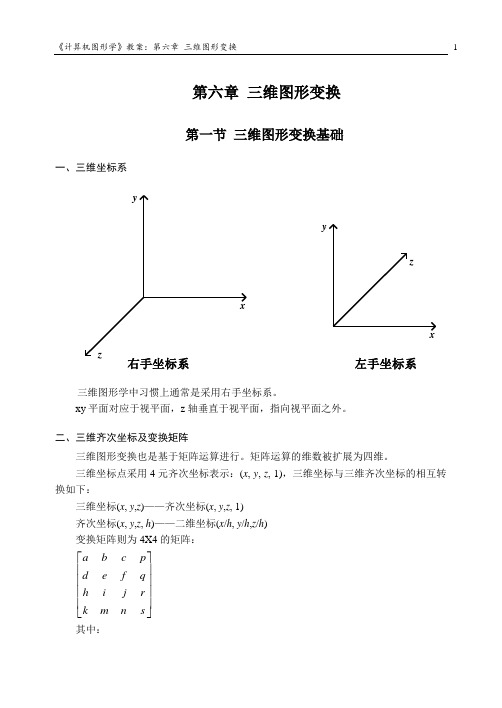
第六章 三维图形变换第一节 三维图形变换基础一、三维坐标系xyzxyz右手坐标系左手坐标系三维图形学中习惯上通常是采用右手坐标系。
xy 平面对应于视平面,z 轴垂直于视平面,指向视平面之外。
二、三维齐次坐标及变换矩阵三维图形变换也是基于矩阵运算进行。
矩阵运算的维数被扩展为四维。
三维坐标点采用4元齐次坐标表示:(x , y , z , 1),三维坐标与三维齐次坐标的相互转换如下:三维坐标(x , y ,z )——齐次坐标(x , y ,z , 1) 齐次坐标(x , y ,z , h )——二维坐标(x /h , y /h ,z /h ) 变换矩阵则为4X4的矩阵:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡s nm kr j i h q f e d p c b a 其中:平移变换第二节 三维几何变换一、三维基本变换 1. 平移变换⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=1010000100001nmk T )1,,,()1,,,(n z m y k x T z y x +++=⋅2. 比例变换)1,,,()1,,,(1000000000000jz ey ax T z y x j e a T =⋅⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡= 3. 旋转变换三维的基本旋转变换分为三种,即绕三个坐标轴的旋转变换。
(1)绕z 轴旋转γ角旋转后z 值不变,x,y 值将发生改变,x,y 值的计算公式与平面旋转相同,即:zz y x y y x x ='+='-='γγγγcos sin sin cos 则变换矩阵为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=1000010000cos sin 00sin cos γγγγT 有:)1,1,cos sin ,sin cos ()1,,,(γγγγy x y x z y x +-=T(2)绕x 轴旋转α角则旋转后x 的坐标值不变,y 和z 的坐标值将改变,相当于在yz 平面上绕平面原点进行旋转变换。
平面转转变换的公式为:ααααcos sin sin cos y x y y x x +='-='对应而来,这里y 对应于x ,z 对应y ,有:ααααcos sin sin cos z y z z y y +='-='则变换矩阵为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=10000cos sin 00sin cos 00001ααααT )1,cos sin ,sin cos ,()1,,,(ααααz y z y x z y x +-=T(3)绕y 轴旋转β角这时,z 对应于x ,x 对应于y 。
计算机图形学第4章图形变换(2)

5、使直线回到原来位置,结果图形即为原图形绕 指定直线旋转变换后的图形。
直线回到原来位置需要进行(3)~(1)的逆变换,其中:
图形绕空间任意轴旋转的总变换矩阵是
H = T
4.3.5 三维对称变换
三维对称变换可以是关于给定对称轴的或者 是关于给定对称平面的变换。三维对称矩阵的建 立类似于二维的。关于给定对称轴的对称变换等 价于绕此轴旋转180°,可以直接使用已讨论过 的相对于轴线的旋转变换公式。关于给定对称平 面的对称变换其最简单的是对称于坐标平面的变 换。当对称平面是坐标平面时(x-y,或x-z,y-z), 可以将此变换看成是左手系和右手系之间的转换。
变换过程为 [x' y' z' 1]=[x y z 1]· S(Sx,Sy,Sz) 其中,Sx,Sy,Sz分别为在x,y,z坐标轴方向上的 比例系数。
4.3.3 三维旋转变换
三维旋转变换:是指将物体绕某个坐标轴旋转 一个角度,所得到的空间位置变化。我们规定旋 转正方向与坐标轴矢量符合右手法则,即从坐标 轴正值向坐标原点观察,逆时针方向转动的角度 为正。如图所示。
设用户选定的窗口范围为(wxl,wyl)和(wxr,wyr), 视口范围为(vxl,vyl)和(vxr,vyr)。 将窗口中的图形转为视口中图形的过程: 1、先平移窗口使其左下角与坐标原点重合; 2、再比例变换使其大小与视口相等; 3、最后再通过平移使其移到视口位置。
4.3 三维几何变换
三维几何变换是二维几何变换的扩展。三维齐 次变换可用4×4矩阵表示。 平移变换 - 比例变换 - 旋转变换 - 绕空间任意轴 的旋转变换 - 对称变换 - 错切变换
四、二维观察变换将投影平面上矩形窗内的图形 变换到显示器(或规范化)坐标中的视口内。
计算机图形学习题参考答案(完整版)
9、使用中点圆算法,绘制圆心为 (0, 0) ,半径 r 10 的圆在第一象限中的部分。 解:
k (x k, yk) (x k ', yk ') pk 0 (0,10) (10, 0) 1r 9 1 (1,10) (10,1) p0 2x 116 2 (2,10) (10, 2) p12x 2 11 3 (3,10) (10, 3) p2 2x 3 2x 4 12y 4 3 5 (5, 9) (9, 5) p4 2x 5 18 6 (6, 8) (8, 6) p5 2x 6 12y6 5 7 (7, 7)
1
度,可以沿着三个方向移动,也可以沿着三个方位旋转,同时还可以建立与其他三维空间的超链接。 因此 VRML 是超空间的。 7、图形的构成要素有哪些? 解: ① 刻画形状的点、线、面、体等几何要素; ② 反映物体表面属性和材质的灰度、颜色等非几何要素。 8、计算机图形学的最高奖以谁的名字命名,获得第一届和第二届该奖的分别是谁? 解: 计算机图形学的最高奖是以 Coons 的名字命名的, 获得第一届和第二届 Coons 奖的是 Ivan Sutherland 和 Pierre Bézier。
2
11、已知: A(0, 0) 、 B(1, 1) 、 C(2, 0) 、 D(1, 2) ,请判断多边形 ABCD 是否是凹多边形。 解: 多 边 形 的 边 向 量 为 AB (1,1, 0) , BC (1, 1, 0) , CD (1, 2, 0) , DA(1, 2, 0) 。 因 为
第 2 章 基本图元的显示
1、假设 RGB 光栅系统的设计采用 810 英寸的屏幕,每个方向的分辨率为每英寸 100 个像素。如果 每个像素 6 位,存放在帧缓冲器中,则帧缓冲器需要多大存储容量(字节数)? 解: 8100101006/8600000 (字节) 。 2、假设计算机字长为 32 位,传输速率为 1 MIP(每秒百万条指令) 。300 DPI(每英寸点数)的激光打 印机,页面大小为 8.511 英寸,要填满帧缓冲器需要多长时间。 解:
计算机图形学 第四章图形变换

第四章 图形变换图形变换是计算机图形学的基础内容之一。
图形在计算机上的显示可以比喻为用假想的照相机对物体进行拍照,并将产生的照片贴在显示屏上的指定位置进行观察的过程。
三维物体要在屏幕上显示首先要做的就是投影变换。
此外,还要求能够对物体进行旋转、缩放、平移变换。
绘图过程还要用窗口规定显示物体的哪个部分,用视区来规定将窗口中的内容显示在屏幕上的什么位置。
图形显示的过程见下图。
图4.1 图形显示的坐标变换过程在本章中,我们将实现二维图形的几何变换、三维图形的投影变换,以及对图形进行裁剪的算法。
4.1变换的数学基础在计算机图形学的图形变换过程中要大量的用到向量、矩阵以及它们之间的运算。
本小节对这些知识做简要介绍。
一、向量及向量运算一个物理量,如果我们只关心其数值的大小(例如物体的质量、体积、密度),则这样的量统称为标量,如果我们既关心其数值大小,还关心其方向(如速度),则这样的两统称为向量。
标量一般用普通字体的英文字母显示,而向量一般用黑体英文字母显示。
设向量111(,,)x y z a ,222(,,)x y z b ,有关的向量运算有: (1) 两个向量的和、差运算121212(,,)x x y y z z ±=±±±a b(2) 两个向量的点乘运算112233x y x y x y =++ a b(3) 两个向量的叉乘运算111122112211221222(,,)x y z y z y z z x z x x y x y x y z ⨯==---ij ka b (4) 向量的长度||==a二、矩阵及矩阵运算由m n ⨯个数(1,2,,;1,2,,)ij a i m j n == 排成矩形表:111212122212n nm m mna a a a a a a a a =A或简记成()ij mn a =A 或()ij m n a ⨯=A ,称为一个m 行n 列的矩阵,简称m n ⨯矩阵,ij a 叫做第i 行第j 列元素。
计算机图形学04-图形几何变换

a21 a22 ...
a2n
... ...
...
am1 am2 ...
amn
其中,aij称为矩阵A的第i行第j列元素
7
第4章:图形几何变换
1 • 二维几何变换 2 • 三维几何变换 3 • 图形几何变换的模式
Computer Graphics
8
§4.1 二维几何变换
1.二维平面上点的表示法 一对坐标(x, y)
3. 将图形从原点平移到P(m, n)
1 0 0
T3
0
1
0
m n 1
26
§4.1.2 二维复合变换
绕平面上任意点 p(m,n)的二维旋转变换的总变换矩阵
T= T1*T2*T3
=
1 0
0 0 cos sin 0 1 0 0
1
0 sin
cos
0
0
1
0
m n 1 0
0 1 m n 1
(5)错切变换
错切变换可以修改三维物体的形状
1 b c 0
d 1 f 0
g h 1 0
0 0 0 1
x' x dy gz,d, g 0关于x轴方向有错切。
y'
y
bx
T
a 0
0
d
{
// translate to screen centre ( 400,300)
p[i].x = p[i].x-400; p[i].y = 300-p[i].y;
p[i].x = p[i].x*sdlg.m_ScaleX;
p[i].y = p[i].y*sdlg.m_ScaleY;
// restore the original coordinate.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5、使直线回到原来位置,结果图形即为原图形绕 指定直线旋转变换后的图形。
直线回到原来位置需要进行(3)~(1)的逆变换,其中:
图形绕空间任意轴旋转的总变换矩阵是
H = T· Rx· Ry· Rz· Ry-1· Rx-1· T -1
(1)平移物体使基准点位置被移到坐标原点;
步骤(1)
(2)绕坐标原点旋转;
步骤(2)
(3)平移物体使基准点回到原始位置。
步骤(3)
该变换顺序的复合变换矩阵为:
2、相对任意点的比例变换 相对任意点(固定点)(xf,yf)的比例变换: 该变换可分成如图所示的三个步骤来实现
图形的原始位置
(1)平移物体使固定点与坐标原点重合;
4.3 三维几何变换
三维几何变换是二维几何变换的扩展。三维齐 次变换可用4×4矩阵表示。 平移变换 - 比例变换 - 旋转变换 - 绕空间任意轴 的旋转变换 - 对称变换
4.3.1 三维平移变换
三维平移变换:将空间点(x,y,z)平移到新空间 点(x',y',z'),齐次变换矩阵为:
变换过程为:
1、二维平移变换矩阵形式是什么? 2、二维比例变换的矩阵形式是什么? 3、二维旋转变换的矩阵形式是什么? 4、相对于原点的二维对称变换矩阵是什么样的? 5、绕任意点(或称基准点)(xr,yr)的旋转由哪 几个基本变换组成?其顺序是什么? 6、相对任意点(固定点)(xr,yr)的比例变换由 哪几个基本变换组成?其组合变换矩阵是什么?
4.3.3 三维旋转变换
三维旋转变换:是指将物体绕某个坐标轴旋转 一个角度,所得到的空间位置变化。我们规定旋 转正方向与坐标轴矢量符合右手法则,即从坐标 轴正值向坐标原点观察,逆时针方向转动的角度 为正。如图所示。
绕三个基本轴的旋转变换: 1、绕z轴旋转θ角。空间物体绕z轴旋转时,物体各 顶点的x,y坐标改变,而z坐标不变。绕z轴旋转矩阵 为:
2、绕x方向旋转θ角同理,绕x轴旋转变换矩阵为:
3、绕y方向旋转θ角同理,绕y轴旋转变换矩阵为:
4.3.4 绕空间任意轴的旋转变换
图a:变换之前
绕空间任意轴的旋转变换:先将图形随直线 (旋转轴)一起移动和旋转并使直线与某一坐标 轴重合,再将图形绕直线进行旋转变换,最后将 旋转变换后的图形和直线一起作相反的旋转和移 动并使直线回到原来位置。具体变换步骤是:
步骤(1)
(2)相对于坐标原点的比例变换;
步骤(2)
(3)平移物体使固定点回到原始位置。
步骤(3)
该变换顺序的复合变换矩阵为
3、矩阵的组合特性 即矩阵乘法满足结合率,不满足交换率。在 进行连续变换时一定要按变换次序进行变换矩阵 的运算,否则不同次序的变换会产生不 z' 1]=[x y z 1]· T(Tx,Ty,Tz)
其中,Tx,Ty,Tz分别为在x,y,z坐标轴方向上的平 移量。
4.3.2 三维比例变换
三维比例变换:沿各坐标轴方向分别乘以一个 比例系数,以实现各个方向上的缩放功能。比例 变换矩阵为
变换过程为 [x' y' z' 1]=[x y z 1]· S(Sx,Sy,Sz) 其中,Sx,Sy,Sz分别为在x,y,z坐标轴方向上的 比例系数。
1、平移使点(x1,y1,z1)位于坐标原点,变换矩 阵是:
2、绕x轴旋转,使直线处在x-z平面上。为此,旋 转角应等于直线在y-z平面上的投影与z轴夹角。 因此投影线与z轴夹角θ的旋转变换矩阵是:
3、绕y轴旋转,使直线与z轴重合。如图所示,直 线与z轴夹角-φ的旋转变换矩阵是:
、
4、进行图形绕直线即绕z轴旋转,旋转矩阵是: