电工学少学时第七章
电工学少学时第三版 张南主编 课后练习答案 第七章_半导体器件修改

第七章半导体器件
7.1基本要求
(1)掌握PN结的单向导电性。
(2)熟悉二极管、稳压管、三极管、场效应管的基本结构、特性曲线和主要参数。
(3)学会分析整流及滤波电路,并对其进行简单的计算。
(4)掌握晶体三极管的电流分配和放大作用。
7.2基本内容
7.2.1PN结与二极管
P型半导体和N型半导体的结合形成PN结。
内部结构条件——发射区高掺杂,其中多数载流子浓度很高;基区很薄,且低掺杂,则基区中多子的浓度很低。
外部条件——外加电源极性应使发射结正向偏置,集电结反向偏置。
在满足上述条件的前提下,三极管中载流子的运动经历发射、复合和扩散以及收集等过程,最后,使三极管中的电流分配符合以下关系:
,且
当基极电流 发生微小的变化时,相应的集电极电流 将有较大的变化,集电极电流的变化量 比基极电流的变化量 大 倍,即
实际二极管:正向电压超过二极管的死区电压(硅:0.5V;锗:0.1V),二极管才能导通。一旦导通,二极管有一定正向电压降(硅:0.6~0.7V;锗:0.2~0.3V)。二极管反向截止,反向电流IR≠0。
主要参数:最大整流电流、反向工作峰值电压。
7.2.2.整流电路
整流就是利用二极管单向导电特性,将交流电转变为直流电的过程。整流二极管可视为理想二极管。在分析整流电路时,应抓住“二极管在正向电压作用下导通,而在反向电压作用下截止”这个基本点,并且弄清楚在交流正半周和负半周期间电流的通路方向,从而确定负载电压的+、-极性。整流电路以桥式电路用的最多。
7.3.2.三极管的放大作用
从三极管的结构看,由NPN和PNP两种类型。但是,无论哪一种类型,管子内部都有三个区、两个PN结,并引出三个电极。三个区——发射区、基区和集电区;两个PN结——发射结和集电结;三个电极——发射极e、基极b和集电极c。
电工学(少学时)(第五版)

获得荣誉
2021年9月26日,《电工学(少学时)(第五版)》被国家教材委员会授予首届全国教材建设奖全国优秀教 材(高等教育类)二等奖。
作者简介
唐介,1936年12月28日出生于浙江省杭州市。1960年毕业于哈尔滨工业大学电机系,并分配到大连工学院电 工学教研室。曾任电工学教研室主任、电磁系副主任,原中国高等学校电工学研究会理事长,大连理工大学电子 信息与电气工程学部电气工程学院教授。
《电工学(少学时)(第五版)》数字课程针对全书内容,制作了与主教材配套的电子教案(PPT文件)、 教学实验讲义,以及考试模拟试卷。
《电工学(少学时)(第五版)》配有慕课——“电工学”。
教材特色
全书分上、下两篇,上篇为电工学原理,下篇为电工学实验,体现了理论教学和实验教学的有机结合,形成 了较完整的体系。
内容简介
《电工学(少学时)(第五版)》分上、下两篇。上篇为电工学原理,其中前七章为电工技术部分,包括电 路理论、电机、电器及其控制等;后七章为电子技术部分,包括模拟电子技术、数字电子技术、传感器等。下篇 为电工学实验,共编入了18个实验。
教学资源
配套教材
课ቤተ መጻሕፍቲ ባይዱ资源
《电工学(少学时)(第五版)》有配套教学参考书——《电工学(少学时)(第五版)学习辅导与习题解 答》。
为了使教材更好地符合学生的认识规律和教师的教学规律,做到好教好学,该书做到叙述清楚、概念准确、 思路清晰,重点突出。
该教材在修订时进一步考虑了不同层次、不同类型学校的不同要求,可以为各类学校所采用。学时较少或学 生基础较差时,可以减少讲授内容,降低教学要求,或者通过教学手段和教学方法的改进,提高课堂信息量,适 当增加学生的自学内容。学时较多或学生基础较好时,可以从标有“”的内容中挑选补充的内容,或者通过习题 课或讨论课等提高学生对所学内容的掌握的程度。
电工学第七版课件(第八版的也可以将就用,改不了多少)第07章 交流电动机(5h)
120
90
可见: 旋转磁场转速n0与频率f1和极对数p有关。
19 /97
章目录 上一页 下一页 返回 退出
第7章 交流电动机
7. 2. 2 电动机的转动原理
1. 转动原理 定子三相绕组通入三相交流电
V2
v
U1
n0
F
W2
N
60 f1 n0 (转/分) W1 F p 旋转磁场
U1
第7章 交流电动机
动画
i2 V 1
i3
V2 U2 W2 W1
W2
0 o
A U1 A U1
t
W2
V2
S
结论: 任意调换两根 V1 电源进线,则旋转 磁场反转。 t 0
S
V1 U2
V2
N
W1
N
U2
W1 13 /97
t 60
退出
章目录 上一页 下一页 返回
第7章 交流电动机
3.旋转磁场的极对数P
I2
E2 R X sE 20
2 2 2 2
s 0 I 2 0 (n n0 )
R X 5. 转子电路的功率因数 cos2 s很小时 2 SX 20 R R2
2 2
2 R2 (sX 20 ) 2
s 1 I 2max
E 20
2 20
cos 2
2 2 R2 X 2 R2 2
pn0 f1 60
f 1= 电源频率 f
25 /97
章目录 上一页 下一页 返回 退出
第7章 交流电动机
7. 3. 2 转子电路
n (1 s )n0 n0 n 60 f 1 s n0 n 100% f sf p 0 2 1
电工学第七章习题答案
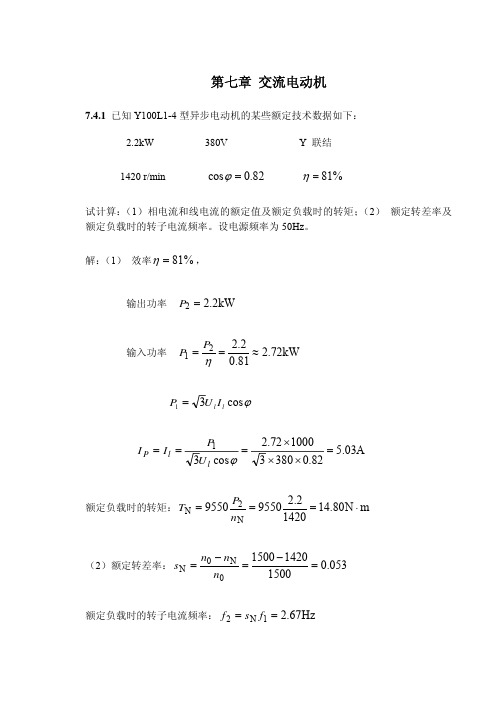
第七章 交流电动机7.4.1 已知Y100L1-4型异步电动机的某些额定技术数据如下:2.2kW 380V Y 联结1420 r/min cos 0.82ϕ= 81%η=试计算:(1)相电流和线电流的额定值及额定负载时的转矩;(2)额定转差率及额定负载时的转子电流频率。
设电源频率为50Hz 。
解:(1) 效率%81=η,输出功率 kW 2.22=P输入功率 kW 72.281.02.221≈==ηP Pϕcos 31l l I U P =A 03.582.03803100072.2cos 31=×××===ϕl l P U PI I 额定负载时的转矩:m N 80.1414202.295509550N2N ⋅===n P T(2)额定转差率:053.01500142015000N 0N =−=−=n nn s额定负载时的转子电流频率:Hz 67.21N 2==f s f7.4.2 有台三相异步电动机,其额定转速为1470 r/min ,电源频率为50Hz 。
在(a )起动瞬间,(b )转子转速为同步转速的2/3时,(c )转差率为0.02时三种情况下,试求:(1)定子旋转磁场对定子的转速;(2) 定子旋转磁场对转子的转速;(3)转子旋转磁场对转子的转速(提示:o sn p f n ==/6022);(4)转子旋转磁场对定子的转速;(5)转子旋转磁场对定子旋转磁场的转速。
解:(a )起动瞬间:n =0,s =1(1) 定子旋转磁场对定子的转速 min r 1500250606010=×==p f n (2) 定子旋转磁场对转子的转速 min r 1500015000=−=−n n(3) 转子旋转磁场对转子的转速 min r 150002==sn n(4) 转子旋转磁场对定子的转速 min r 15000=n(5) 因为转子旋转磁场和定子旋转磁场总是以同一转速在空间旋转着,所以转子旋转磁场对定子旋转磁场的转速为零(b ) 转子转速为同步转速的2时:(1) 定子旋转磁场对定子的转速 min r 1500250606010=×==p f n (2) 定子旋转磁场对转子的转速 min r 50015003215000=×−=−n n (3) 转子旋转磁场对转子的转速(4) 转子旋转磁场对定子的转速 min r 15000=nmin r 500150015001000150000002=×−=×−==n n n n sn n(5) 转子旋转磁场对定子旋转磁场的转速为零(c ) 转差率为0.02时:(1) 定子旋转磁场对定子的转速 min r 1500250606010=×==p f n (2) 定子旋转磁场对转子的转速(3) 转子旋转磁场对转子的转速(4) 转子旋转磁场对定子的转速(5) 转子旋转磁场对定子旋转磁场的转速为零7.4.6 某四极三相异步电动机的额定功率为30kW ,额定电压为380V ,三角形联结,频率为50Hz 。
电工学第7章
1
s
o
TN Tst Tmax T
7· 2 机械特性曲线 4· 1. 额定转矩TN 额定转矩是电动机在额定负载时的转矩。 P2 P2 T T 9.55 2 n n 60 P2 千瓦(W) T 9550 转每分(r/min) n 牛· 米(N· m) 例如某电动机:P2N =7.5kW, nN =1440 r / min, 则额定转矩为: P2 N 9550 7.5 49.7 N m TN 9550 1440 nN
2 1
2. 当电源电压 U1 一定时,T 是 s 的函数。 3. R2 的大小对 T 有影响。绕线式异步电动机可外 接电阻来改变转子电阻R2 ,从而改变转矩。
7· 2 机械特性曲线 4· T 2 sR2U1 Tmax TK 2 R2 ( sX 20 )2 Tst U1与R2一定时, TN T与s的关系:T f ( s ) o s s 或n与T的关系: f ( T ) n n n nN nm 0 N m 三个转矩: n 额定转矩TN n0 nN 最大转矩Tmax nm 起动转矩Tst
V2
V1
t0
U2
W2
i1 I m sin t i2 I m sin( t 120)
i3 I m sin( t 120)
W1
V1
合成磁场方向向下
7· 1 旋转磁场 2· i 1. 旋转磁场 的产生 o
U1
V2
i1
60
i2
i3 t
i1
U1
W2 U
2
90 180
i1
i2
+ - + e1 e2 - + u1 + - e 1 e 2 - + - f1 f2 异步电动机每相电路
电工学课件第七章
解: (1)Ist =7 IN =720=140A
(2) I lY 1
I l
3
7.4
Ist Y = Ist /3=140/3=47A
#
电工学课件第七章
§ 9.5 三相异步电动机的选择 一、三相异步机铭牌与技术数据
1. 型号 Y 132M-4
异步电动机
磁极数(极对数 p=2)
三相定子绕组:产生旋转磁场
定子绕组 (三相)
定子
转子:在旋转磁场作用下,产 生感应电动势或电流。
U
V’
W’
线绕式 鼠笼式
W
转子
V U’
鼠笼转子
电工学课件第七章
机座
7.1.2 异步电动机的工作原理-----旋转磁场的产生 异步机中,旋转磁场代替了旋转磁极
(•)电流出
V’
n U
1
W’
W
V
U’
()电流入
7.1 三相异步电动机的结构及工作原理
电动机的分类 交流电动机
电动机
异步机 同步机
鼠笼式 绕线式
直流电动机 他励、异励、串励、复励
鼠笼式异步交流电动机授课内容: 基本结构、工作原理、 机械特性、控制方法
电工学课件第七章
U
定子 三相异步机的结构
V’
W’
转子 W
V U’
电工学课件第七章
7.1.1 三相异步机的结构
所以降压起动适合于空载或轻载起动的场合
正常 运行
UP Z A
C
X
YB
A
UP' Z X
CY
起动
B 7.4U P 来自1 3 UP1
[工学]电工学少学时第三版课后答案全
![[工学]电工学少学时第三版课后答案全](https://img.taocdn.com/s3/m/fafdb4d216fc700aba68fc9d.png)
[工学]电工学少学时第三版课后答案全第一章习题 1,1 指出图1,1所示电路中A、B、C三点的电位。
图1,1 题 1,1 的电路6I,,1.5mA解:图(a)中,电流 , 各点电位 V= 0 C 2,2V= 2×1.5 = 3V BV= (2+2)×1.5 = 6V A6I,,1mA 图(b)中,电流,各点电位 V= 0 B 4,2V= 4×1 = 4V AV =, 2×1 = ,2V C图(c)中,因S断开,电流I = 0,各点电位 V = 6V AV = 6V BV = 0 C12I,,2mA 图(d)中,电流,各点电位V = 2×(4+2) =12V A2,4V = 2×2 = 4V BV= 0 C图(e)的电路按一般电路画法如图,6,6I,,1mA 电流, 4,2各点电位 V = E= 6V A1V = (,1×4)+6 = 2V BV= ,6V C1,2 图1,2所示电路元件P产生功率为10W,则电流I应为多少? 解:由图1,2可知电压U和电流I参考方向不一致,P = ,10W ,UI因为U,10V, 所以电流I,,1A图 1,2 题 1,2 的电路1,3 额定值为1W、10Ω的电阻器,使用时通过电流的限额是多少, 解:P12根据功率P = I R I,,,0.316AR101,4 在图1,3所示三个电路中,已知电珠EL的额定值都是6V、50mA,试问哪个电珠能正常发光,图 1,3 题 1,4 的电路解:图(a)电路,恒压源输出的12V电压加在电珠EL两端,其值超过电珠额定值,不能正常发光。
6R,,0.12K,,120,图(b)电路电珠的电阻,其值与120Ω电阻相同,因此50 电珠EL的电压为6V,可以正常工作。
图(c)电路,电珠与120Ω电阻并联后,电阻为60Ω,再与120Ω电阻串联,电60,12,4V珠两端的电压为小于额定值,电珠不能正常发光。
电工学第七章

因 =BS,如要得到相同的磁通 ,则铸铁铁
心的截面积必须是硅钢片铁心的截面积的17倍。
结论:如果线圈中通有同样大小的励磁电流,要
得到相等的磁通,采用磁导率高的铁心材料,可 使铁心的用铁量大为降低。
7.4 交流铁心线圈电路
7.2.3 磁滞性
磁滞性:磁性材料中磁感应强度B的变化总是滞后于
外磁场变化的性质。
磁性材料在交变磁场中反复磁化,其B-H关系曲线
是一条回形闭合曲线,称为磁滞回线。 B
剩磁感应强度Br (剩磁) : 当线圈中电流减小到零(H=0)
Br•
时,铁心中的磁感应强度。
矫顽磁力Hc: 使 B = 0 所需的 H 值。
磁
外
畴
磁
场
在外磁场作用下,磁畴方向发生变化,使之与外
磁场方向趋于一致,物质整体显示出磁性来,称为 磁化。即磁性物质能被磁化。
7.2 磁性材料的磁性能
磁性材料主要指铁、镍、钴及其合金等。
7.2.1 高导磁性
磁性材料的磁导率通常都很高,即 r 1 (如坡 莫合金,其 r 可达 2105 ) 。
磁性材料能被强烈的磁化,具有很高的导磁性 能。
场媒质的磁性() 无关;而磁感应强度 B 与磁场媒
质的磁性有关。
7.1.5 物质的磁性
1. 非磁性物质 非磁性物质分子电流的磁场方向杂乱无章,几乎
不受外磁场的影响而互相抵消,不具有磁化特性。
非磁性材料的磁导率都是常数,有:
0 r1 当磁场媒质是非磁性材料时,有: B( )
B=0H
即 B与 H 成正比,呈线性关系。
磁通势F
电工学(少学时)课后答案第7章
返
回
上一页
下一页
7.5.2 如图三相异步电动机正反转控制电路。控制要求是:
END
返
回
上一题
下一题
7.7.4 若将教材图 7.4.1 所示的顺序连锁控制电路改用 PLC 控制, 试画出梯形图, 写出语句表。 【解】列出 I/O 分配表如下: 输入: SBst1 :
X0 X0 Y30 X2 Y31 X4 Y30
SBst2 : X1 SBstp1 : X2 SBstp2: X3 FR1 : FR2 :
解将图中与正转起动按钮sbstf并联的stb1的机械联动的动合辅助触点去掉并调整撞快位置使其在工作台退回原位时压下行程开关stb1下一题上一题电气自动控制应为动合触点752如图三相异步电动机正反转控制电路
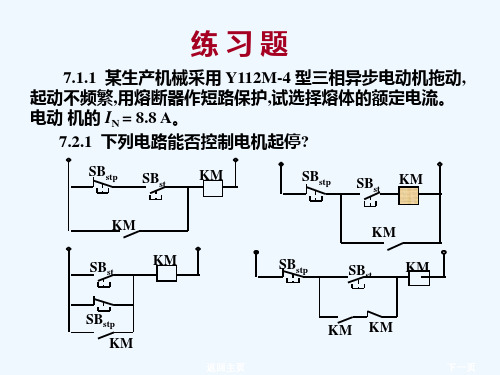
练习题
7.1.1 某生产机械采用 Y112M-4 型三相异步电动机拖动, 起动不频繁,用熔断器作短路保护,试选择熔体的额定电流。 电动 机的 IN = 8.8 A。 7.2.1 下列电路能否控制电机起停?
上一题
下一题
7.7.3 若将教材图 7.7.1 中的停止按钮改用动断按钮,试
画出梯形图,写出语句表。 【解】
X0 Y30 X1 Y30 X3 X2 Y31 Y31 X3 X2 Y30
Y31
LD X0 OR Y30 ANI Y31 AND X3 AND X2 OUT Y30
LDI X1 OR Y31 ANI Y30 AND X3 AND X2 OUT Y31
电工学第七章

R 10k
C 0.01u R3 A R2 RP R1 DZ VZ= 6V vO
vP +
C 0.01u
–
vN
VRP
幅度较小时, AV 3
V o
幅度增大到稳压管击穿时,
RP和R1的电流、 R2的压降不变
AV
V o
V N 负反馈系数 F V
o
稳幅时 VN VP 1 Vom 3
VN VRp VZ Vom VR p
VN RP R1
例1:试用相位平衡条件判断下图电路能否产生自 激振荡 +UCC
正反馈
RB1 C1 RB2 - RE CE
L
-
C
-
注意:用瞬时极性法判断反馈的极性时, 耦合电容、旁路电容两端的极性相同, 属于选频网络的电容,其两端的极性相反。
频率响应
VCC M vo Rb1
(+) (+)
VCC Rb1
(-) (+) b
M (-) L c
C
(+) b
L c (-) T e
C
(+)
T e
(-)
Rb2 C1
C1
Ce
Rb2
Re
Re
反馈 反馈
满足相位平衡条件 满足相位平衡条件
首端
三点式LC并联电路
L1 中间端 L2 尾端 C
仍然由LC并联谐振电路构成选频网络
一般有 R L 则
Z L 1 R j(L ) C
1 LC
C
当 0 谐振时
1 LC
时, 电路谐振。 0
为谐振频率
电工学第7章-课件

除阳极加正向电压,必须同时在门极与阴极之间加 一定的门极电压,有足够的门极电流。
关断条件:
阳极电流小于维持电流IH
/webnew/
7.2.3 晶闸管的伏安特性和 主要参数
1. 晶闸管的伏安特性 晶闸管的伏安特性是指阳极与阴极间的电
二极管等效电路
/webnew/
7.2.1 晶闸管的结构
2. 晶闸管的等效模型和符号
➢ 三极管等效电路 A
P1
J1
N1 J2
G
P2
J3
N2
K
/webnew/
三极管等效电路
A A
P1
J1 N1 N1
J2
7.1.1电力电子技术的发展
1. 电力电子器件 1957年第一只晶闸管出现 ; 衍生器件:快速晶闸管、逆导晶闸管、双向晶闸管、不对称晶闸管 全控型电力电子器件 :可关断晶闸管(GTO)、电力晶体管(GTR)、
绝缘栅双极晶体管(IGBT) 大功率场效应晶体管(MOSFET)
2. 电力电子电路 (1)可控整流电路 (2)逆变电路 (3)直流斩波电路 (4)交流调压电路
/webnew/
7.2.2 晶闸管的工作原理
2. 晶闸管工作过程--------正反馈
Eg →Ig →Ib2 ↑→Ic2 ↑(= βIb2)=Ib1↑→Ic1 ↑(=βIb1 )
/webnew/
7.2.2 晶闸管的工作原理
7.2 晶闸管的结构和工作原理
7.2.1 晶闸管的结构 7.2.2 晶闸管的工作原理 7.2.3 晶闸管的伏安特性和主要参数
/webnew/
7.2.1 晶闸管的结构
1. 晶闸管的外形结构
➢ 四层半导体:P1N1P2N2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
~ SB1
SB2 SB3 KM
KM
点动按钮SB3的作用: (1) 使接触器线圈KM通电; (2) 使线圈KM不能自锁。
复合按钮
点动时: 按下SB3
电机运转
FR
~ SB1
SB2 SB3
KM
通电
KM
先断开 闭合
后闭合
自锁触点不起作用
松开SB3
Q
FR KM
控 制
FU
主
SB2 KM F
KM
主电路: M 3~
三相电源—Q—FU—
KM(主触点)—FR(热元件)—M
Q FU SB2 KM FR SB1
FR KM
控
制
电 路
KM
控制电路: M 3~
1—SB2—SB1—KM(线圈)
KM(辅助触点) 2———FR(常闭触点)
点动及长动控制线路
电机
SQb
SQa
挡块
1
前进(正转)
后退
2
SQb
SQa
按SBF时 KMF通电 电机正转 工作台前进 到达预定位置, 挡块1撞击SQb (其常闭断开, 常开闭合) KMF断电 停止正转 KMR通电 电机反转 (工作台后退)
行程开关 自动往返运动: KMF SQ KM b R SB SB
F
SQa
KMF SBR
刀开关
在自动控制电路中,刀开关主要是用作电 源的隔离开关,以便在更换熔断器、检修用电 设备或用电设备长期不工作时用来断开电源。
(二)熔断器
用于低压线路中的短路保护。 符号 FU
• 结构:熔体、外壳。 • 种类: 插入式、螺旋式、 管式、填料式 。 额定电流 : 2 A ~ 600 A。
(三)自动空气断路器(自动开关)
KMR
SQa
KMF KMR
SQb
7.6 时间控制
时间继电器是按一定要求来接通或断开被控制 电路的控制电器,用以协调和控制生产机械的各种 动作。 是从得到输入信号(线圈通电或断电)起,经过 一段时间延时后才动作的继电器。适用于定时控制。 在交流电路中常采用空气式时间继电器,它是 利用空气阻尼作用而达到动作延时的目的。
线圈 常开触点 KM
常闭触点
KM
~ ~380
主触头 弹簧
动作过程 线圈通电 衔铁被吸合 触头闭合
线圈
铁芯 衔铁 电机
M 3~
常 开 触 头
常 闭 触 头
电机接通 电源
辅助触头
点动控制
~ ~380
主触头闭合
动作过程 线圈通电 衔铁被吸合 触头闭合
常 开 触 头 闭 合 常 闭 触 头 断 开
~ 220
FR
~ SB1
SB2 SB3
KM
KM
后闭合 断开
断电
先断开
松开SB3
电机停转
实现点动
用途:试车、检修以及车床主轴的调整等。 FR
~ SB1
SB2 SB3 KM
KM
断电
断开
后闭合
先断开
7.3 正反转控制
在生产上往往要求运动部件向正反两个方向 运动。也就是让电动机做正反转运动。我们在学习 电动机的工作原理时已经知道,只要将接到电源的 任意两根联线对调即可。 需要用两个接触器来实现这一要求。 当正转接触器工作时,电动机正转; 当反转接触器工作时,将电动机接到电源的任 意两根联线对调一下,电动机反转。
KM2断电
KM2
KM2
常闭延时断开 KT通电 常开闭合 KM3通电 绕组Y接 常闭断开
.
.
SB1
SB2
KT
KT KM3
KM1
通 电
KT
通 电
KM1接通电源 KM2—绕组联接 KM3—绕组Y联接 起动过程:
KM1
KM2
通 电
KM3
断 电
KM1 KM2
KM2
常闭断开 KM2断电 KM1通电 常开闭合 常闭延时断开 KT通电 按SB2 KM 断电 常开闭合 自锁 2 KM3通电 绕组Y接 电动机Y接起动 松开SB2, 电机仍处于Y 接起动状态。常闭断开
继电接触控制线路由一些基本控制环节组成, 下面介绍继电接触控制线路的绘制。 在电工技术中所绘制的控制线路图为原理图, 它不考虑电器的结构和实际位置,突出的是电气原 理。 电器自动控制原理图的绘制原则及读图方法: 1. 按国家规定的电工图形符号和文字符号画图。 2. 控制线路由主电路(被控制负载所在电路) 和控制电路 (控制主电路状态)组成。 3. 属同一电器元件的不同部分(如接触器的线圈和 触点)按其功能和所接电路的不同分别画在不同 的电路中,但必须标注相同的文字符号。
出气孔
橡皮膜 活塞 进气孔 调节螺钉 微动开关
释放弹簧
杠杆 静铁心 微动开关 动铁心 恢复弹簧 线 圈
断 电 出气孔 延 时 时 橡皮膜 间 活塞 继 电 器 释放弹簧 通 电 后
静铁心
进气孔
调节螺钉 延时动作的触点
杠杆
瞬时动作的触点
动铁心 线 圈
出气孔
进气孔
调节螺钉
微动开关
断 橡皮膜 电 后 活塞 开 始 延 时
静铁心
释放弹簧
杠杆
微动开关
线 圈
出气孔
进气孔
调节螺钉
微动开关
断 橡皮膜 电 后 活塞 开 始 延 时
静铁心
释放弹簧
杠杆
微动开关
线 圈
出气孔
进气孔
调节螺钉
延时触点归位
断 橡皮膜 电 后 开 始 延 时
活塞 释放弹簧 杠杆 静铁心
微动开关
动铁心 线 圈
恢复弹簧
通电延时型时间继电器符号
KT KT
KT
时间继电器的分类
通电延时型时间继电器
断电延时型时间继电器
一、通电延时型空气式时间继电器
出气孔 橡皮膜 活塞 进气孔 调节螺钉 微动开关2
释放弹簧 恢复弹簧
动铁心 线 圈
杠杆
托板
微动开关1
静铁心
时间继电器线圈通电后
出气孔 橡皮膜 活塞 进气孔 调节螺钉
释放弹簧
恢复弹簧 动铁心 静铁心
杠杆
i
瞬时动作的触点
4. 所有电器的图形符号均按无电压、无外力作用下 的正常状态画出,即按通电前的状态绘制。 5. 与电路无关的部件(如铁心、支架、弹簧等) 在控 制电路中不画出。
分析和设计控制电路时应注意以下几点:
(1) 使控制电路简单,电器元件少,而且工作又要准 确可靠 (2) 尽可能避免多个电器元件依次动作才能接通另一 个电器的控制电路。 (3) 必须保证每个线圈的额定电压,不能将两个线圈 串联。
常闭
延时闭合的常开触头
KT
线圈
KT
常开 断电延时型时间继电器的符号
KT
延时打开的常闭触头
KT
KT
线圈
延时恢复闭合 的常闭触头
延时打开的 常开触头
时间控制
Q FU 1. Y– 换接起动控制线路
.
V1
.
SB1
SB2
KT
KT KM3
KM2
KM1 KT KM3 KM1
KM1
U1 W1
KM1
U2
V2 W2
电机接通 电源
M 3~
三、热继电器
用于电动机的过载保护。
(a) 外形
(b) 结构
热继电器外形与结构
热继电器的结构原理图
I 发热元件 I
常闭触点
扣板
双金属片
当主电路中电流超 过容许值而使双金 属片受热时,它便 向上弯曲,因而脱 钩,常闭触点断开
弹簧
复位按钮
热继电器的结构原理图
I 发热元件 I
常闭触点
出气孔 橡皮膜
进气孔 调节螺钉 活塞
释放弹簧
恢复弹簧 动铁心 静铁心
杠杆
i
瞬时动作的触点
出气孔 橡皮膜
进气孔 调节螺钉 活塞
释放弹簧
恢复弹簧 动铁心 静铁心
杠杆
i
瞬时动作的触点
出气孔 橡皮膜
进气孔 调节螺钉 活塞
释放弹簧
恢复弹簧 动铁心 静铁心
杠杆
i
瞬时动作的触点
出气孔 橡皮膜
进气孔 调节螺钉 延时动作的触点
7.2
起停自动控制
笼式电动机的起停自动控制电路是控制电路中最 简单、最常用的一种电路。
(一)按钮
按钮常用于接通和断开控制电路。
常闭触点
(a) 外形图
常开触点
(b) 结构
按钮帽
结 复位弹簧 支柱连杆
常闭静触头
构 1 2 3 符 SB SB 4 1 3 2 4
桥式静触头
常开静触头 外壳
号
名 称 常闭按钮 (停止按钮) 常开按钮 (起动按钮)
第 7 章
电气自动控制
自动控制可以通过电气、机械、液压或气动 等手段来实现。其中以电气自动控制的应用最广 泛、最方便。 控制电路是由用电设备、控制电器和保护电 器组成。 用来控制用电设备工作状态的电器称为控制 电器。
用来保护电源和用电设备的电器称为保护电 器。 在低压供电系统中使用的电器称为低压电器。 低压电器分为手动电器和自动电器。
SB
复合按钮
二、交流接触器
功能: 用来接通或切断电动 机或其他负载的主电 路的一种控制电器。
利用电磁吸力工作 的自动电器。
1. 接触器的基本结构
主触点
绝缘支架 辅助触点
动触点 静触点 上铁心
主触点
辅助触点
CJ0
吸引线圈 上铁心
下铁心
吸引 线圈