【参考借鉴】无人机后期航片拼接软件PhotoScan详细使用教程.doc
CC、Pix4D、PhotoScan生成正射影像并进行拼接修图(附航测练习数据下载)
CC、Pix4D、PhotoScan生成正射影像并进行拼接修图(附航测练习数据下载)今天我们来整理下关于ContextCapture、Pix4D、PhotoScan中正射影像的生成。
生成的正射影像到ArcGIS或Global Mapper中进行影像拼接及PhotoShop修图都有介绍。
文末有少部分航测数据供大家练习。
01Pix4D打开软件新建项目,项目名称填写,项目位置选择E盘根目录,项目类型默认为新项目。
完成后点击下一步。
添加完成后点击下一步,图像坐标系默认为WGS84经纬度坐标,不需要更改。
地理定位图像:从文件选择POS文件。
相机型号通常能自动识别。
选择3D地图,此项可生成DSM和正射影像。
输出坐标系选择与控制点坐标系一致,点击已知坐标系查找Xian80、Beijing54、CGCS2000 或WGS84。
这里选择WGS84/UTM Zone32n。
这里控制点坐标系为ch1903+/lv95,选择完成后点击结束。
建议将123全部勾选(勾选2能提高成果质量),然后点击选项——初始化处理,一边选择全面高精度检测,如果照片很多,则选择快速检测。
然后点击开始,处理完第一步检查质量报告。
此处提示:特征点数量中位数为3586,13张影像中13张已校准(100%),所有影像已启用初始和优化的内部影像参数之间相对差异为0.62%每个校准图像中的匹配特征点中位数为1397.46在相应位置找到控制点文件。
导入控制点后点击空三射线编辑器4个控制点已经添加完成点击左侧控制点,在右侧图片中找到控制点的位置刺点后点击使用刺点结束后点击:运行——重新优化重新优化后重新查看质量检查报告。
点击镶嵌图编辑器点击右侧导出按钮,对正射影像进行整体导出。
在看到弹窗后,按照弹窗路径找到正射影像。
02ContextCapture打开CC——新建工程,工程名称为text,其他默认。
(打开软件时一定要将ContextCapture Center Engine打开)点击影像——添加影像,将照片导入软件。
无人机数据处理说明
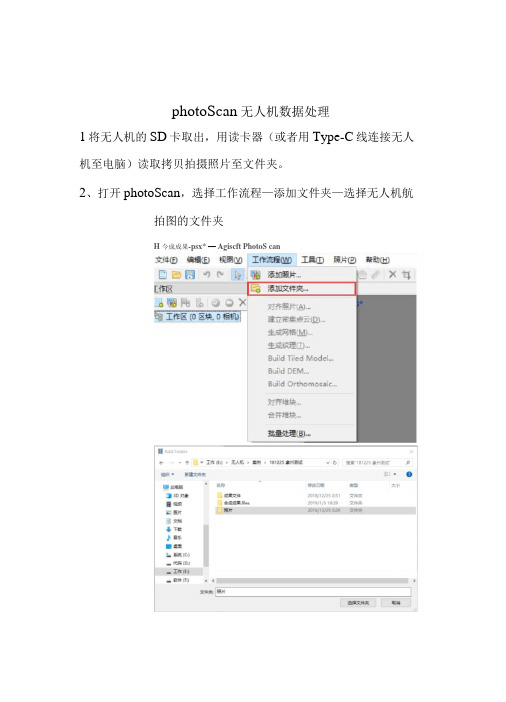
photoScan无人机数据处理1将无人机的SD卡取出,用读卡器(或者用Type-C线连接无人机至电脑)读取拷贝拍摄照片至文件夹。
2、打开photoScan,选择工作流程—添加文件夹—选择无人机航拍图的文件夹H 今成成果-psx* —Agiscft PhotoS can3、选择工作—批量处理—每步必须保存项目—添加H 刍虚戏至.psx* — AgisoFt PhctcScan Build DEM. 咅共w 说.. atsvtaajr,.玄畦]«S(£l 赠必 工帽凡程仕鱼工H ①輩片® Build Tiled Models 匸作鼠 3 澤E 校… y 匾Fh 鼠】D ,. gH!片㈣一 、工性匡(1区境.40希T ,I ) 建立庄耍皂云皿“. Chunk 1伽相發 生成网格(血“ 员爛片.4、添加-作业类型:选对齐照片-精度:双击选中-点击确定5、添加-作业类型:选生成网格-源数据:双击选“疏点云〃-点击确定B作业类型:生成冋格合用于: 所有堆块数直窪集点云 三取面改 表面薄 J) |餘.号云瞄咬7?曲关财限制确定 |6、添加-作业类型:选生成纹理-点击确定 时批圣处理B 菰加作业映 从弦理海大小取销7、添加—作业类型:选Build Orthomosaic —点击确定.打 B 漆加作业 所育雄峡 作业类型:Build. Ortkomos-ii 逹用于/ .3 Chunk ]伽倒] 握性 数匱 內 0 Surface 1 混舍* 3 无 V風消 4.09&作业类型j 生房纹暉话用于: 麻有推护好:8、选择确定9、等着处理进度变成完成时,选择Export Orthomosaic —导出JPEG/TIFF/PNG...3—A^iisoft PbotoScan 女件(E ) 祖IE 媛世)工作顧I 也 工M ① 曜片企;略動® J 新建曲Ctd+N n?HQj.-Ctrl + O SHU 日 CtH+M导出点Wb尊出茹.. ExpoH Ti*d ModffL. Export Orthotw&aic X 妄已般宇理悝懂豈 吉-.. Uplc-iad Mnb... ±(5B6fi-.. 尊出 JPtGEFFJilGf 1 骨岀 Google KN1Z..* Export Gaeigle Map Tiles.- Expert MI&Til«r.. Export World Wind Tilti,… 10、选择导出,填写保存的文件名即可 I Export Ortho mosaic WGS 豪 作出G ・•4326) 回 P ;»l HEt (h 』: 米... 。
photoscan无人机使用手册
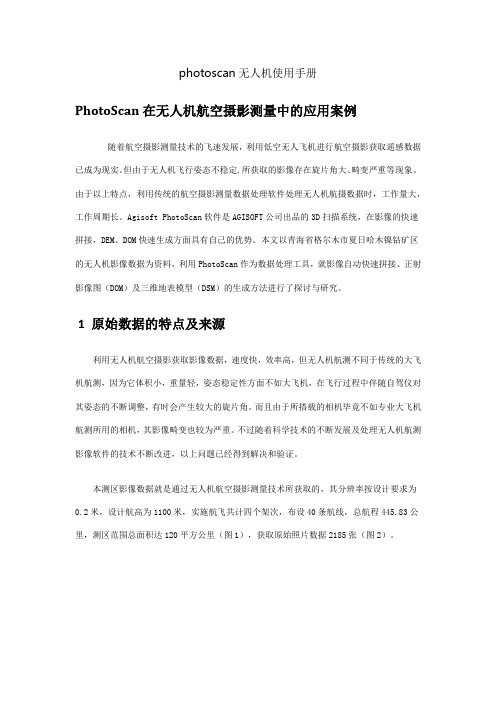
photoscan无人机使用手册PhotoScan在无人机航空摄影测量中的应用案例随着航空摄影测量技术的飞速发展,利用低空无人飞机进行航空摄影获取遥感数据已成为现实。
但由于无人机飞行姿态不稳定,所获取的影像存在旋片角大、畸变严重等现象。
由于以上特点,利用传统的航空摄影测量数据处理软件处理无人机航摄数据时,工作量大,工作周期长。
Agisoft PhotoScan软件是AGISOFT公司出品的3D扫描系统,在影像的快速拼接,DEM、DOM快速生成方面具有自己的优势。
本文以青海省格尔木市夏日哈木镍钴矿区的无人机影像数据为资料,利用PhotoScan作为数据处理工具,就影像自动快速拼接、正射影像图(DOM)及三维地表模型(DSM)的生成方法进行了探讨与研究。
1 原始数据的特点及来源利用无人机航空摄影获取影像数据,速度快,效率高,但无人机航测不同于传统的大飞机航测,因为它体积小,重量轻,姿态稳定性方面不如大飞机,在飞行过程中伴随自驾仪对其姿态的不断调整,有时会产生较大的旋片角。
而且由于所搭载的相机毕竟不如专业大飞机航测所用的相机,其影像畸变也较为严重。
不过随着科学技术的不断发展及处理无人机航测影像软件的技术不断改进,以上问题已经得到解决和验证。
本测区影像数据就是通过无人机航空摄影测量技术所获取的,其分辨率按设计要求为0.2米,设计航高为1100米,实施航飞共计四个架次,布设40条航线,总航程445.83公里,测区范围总面积达120平方公里(图1),获取原始照片数据2185张(图2)。
图1 图22 数据处理软件Agisoft PhotoScan的分析介绍Agisoft PhotoScan是俄罗斯Agisoft公司研发的3D扫描软件,这是一款基于影像自动生成高质量三维模型的软件,它根据多视图三维重建技术,可以对任意照片进行处理,小到考古摆件,大到大量航片数据处理,软件仅通过导入具有一定重叠率的数码影像,便可实现高质量的正射影像生成及三维模型重建,整个工作流程无论是影像定向还是三维模型重建过程都是完全自动化我们将PhotoScan引入无人机航空摄影测量数据处理应用当中,结合夏日哈木矿区无人机航飞数据,实现了航测成果中DOM和DSM产品的生产(图3)。
无人机航空影像后期处理方案及注意事项
3
流程报告 收到资料、展航飞相主点及外业控制点、制作接合图表、航线分组、测区划分
原始航片畸变纠正
建立测区、输入测区参数、输入控制点
建立相机参数文件
建立影像列表
内定向
确定航带间偏移量
确定航带连接点布局
自动转点(航向及旁向可分步执行)
PATB 自动挑粗差
交互式编辑、补缺点
量测外业控制点
PATB 平差解算 多测区 不符合限差 符合限差
五、 立体测图..........................................................................................63 六、 DEM 制作...........................................................................................67 七、 正射影像制作................................................................................. 73
6
流程报告
3) 把测区的所有架次的“照片数据.txt”都分别进行坐标转换同时分别进行 展点,最终制作成*.DWG 或*.DXF 格式的结合图表。同时为了方便空三加密作 业区的划分把外业实测的控制数据也分别展到结合图表中。如下图:
4) 确立航线之间的关系以及原始数据的核查
7
流程报告
打开原始数据目录
(一) (二) 创建立体模型............................................................................................ 60 核线重采样................................................................................................ 60
无人机航摄图像处理的方法与软件介绍

无人机航摄图像处理的方法与软件介绍无人机航摄技术是一项快速发展的领域,它利用无人机携带载荷完成空中摄影测量任务。
尤其是无人机航摄图像处理方法和软件的应用,为地理信息系统、城市规划、农业资源管理等领域提供了便捷高效的数据支持。
本文将介绍无人机航摄图像处理的一些常用方法以及相关的软件。
一、无人机航摄图像处理方法1. 全自动匹配与拼接全自动匹配与拼接是无人机航摄图像处理的基础方法之一。
该方法通过计算机视觉技术,自动识别和匹配航摄图像中的特征点,并将其拼接成为完整的地图或景观。
常用的算法包括SIFT、SURF等,它们能够快速准确地进行特征点匹配和图像拼接,大大提高了图像处理效率和精度。
2. 三维重建与测量无人机航摄图像的特点是多角度、多视角,因此可以通过三维重建与测量方法,生成高精度的三维模型。
这种方法一般包括点云生成、三维模型生成和纹理贴图等步骤。
常用的软件有Pix4D、Agisoft等,它们能够自动提取出点云信息,并基于点云生成三维模型,可用于建筑、地形、农田等领域的测量与分析。
3. 遥感影像分类与分析无人机航摄图像处理不仅可以生成三维模型,还可以进行遥感影像分类与分析。
通过将航摄图像与遥感技术相结合,可以获取地表覆盖信息、植被指数、水域提取等数据。
这对于地理信息系统、城市规划、农业资源管理等领域具有重要意义。
二、无人机航摄图像处理软件介绍1. Pix4DPix4D是一款功能强大的无人机航摄图像处理软件。
该软件可以自动识别特征点并进行图像拼接,生成高精度的三维模型。
此外,Pix4D还提供了遥感影像分类与分析的功能,可以方便地获取地表覆盖信息和植被指数等数据。
2. Agisoft MetashapeAgisoft Metashape是另一款常用的无人机航摄图像处理软件。
它具有强大的三维重建和测量能力,可以生成高精度的三维模型,并提供了纹理贴图功能。
此外,Agisoft Metashape还支持多种数据格式的导入和导出,方便与其他软件进行数据共享和交流。
QMosaic-2.0航空影像快速拼接软件操作手册说明书

5244
55
6
6
.2
QMosaic 操作手册
非编辑版
493 110 38 541420. 4312754.5 1889.40 -9.6 -7.1 -89
5676
4
4
.7
494 110 38 541420. 4312857.4 1891.96 -9.1 -7.7 269
2796
41
5
.4
495 110 38 541417. 4312958.4 1890.43 -9.3 -6 267
像片高度,单位为毫米
pos 数据:
表 1 POS 文件示例
影像 经 纬 X坐标
Y坐标
Z坐标 Phi Ome Ka
名称 度 度
ga ppa
434 110 38 541067. 4312958.1 1880.08 -9.7 0.8 87
6371
15
1
435 110 38 541072. 4312853.4 1878.76 -7.9 0.3 87.
Y_Col: 5
POSY坐标所在列
Z_Col: 6
POSZ坐标所在列
Phi_Col: 7
POS旋转角phi所在列
Omega_Col: 8
POS旋转角omega所在列
Kappa_Col: 9
POS旋转角kappa所在列
IsPlane: yes
POS坐标是否是平面坐标
Separator: ""
列与列之间的分隔符,用双引号括起来,默
1.3 输入数据约定
使用 QMosaic 非编辑版航空影像快速拼接软件,创建新的工程,
需要几种不同的数据输入,对于各种输入数据的约定如下:
无人机后期航片拼接软件PhotoScan详细使用教程(精编文档).doc

【最新整理,下载后即可编辑】无人机后期航片拼接软件PhotoScan详细使用教程摘要:本文主要介绍一款无人机航片后期处理软件——Agisoft Photoscan,手把手教你完成航片正射影像拼接、生成DEM。
PhotoScan是一款基于影像自动生成高质量三维模型的软件。
使用时无需设置初始值,无需相机检校,利用最新的多视图影像三维重建技术,就可以对具有影像重叠的照片进行处理,也可以通过给予的控制点生成真实坐标的三维模型。
无论是航拍影像还是高分辨率数码相机拍摄的影像都可以使用这个软件进行处理。
整个工作流程无论是影像定向还是三维模型重建过程都是完全自动化的。
PhotoScan可生成高分辨率真正射影像和带精细色彩纹理的DEM模型。
使用控制点可达5cm精度。
完全自动化的工作流程,即使非专业人员也可以在一台电脑上处理成百上千张航拍影像,生成专业级别的摄影测量数据。
航片拼接软件有很多,之前我们使用过Pix4D、Global mapper、EasyUAV、Photoscan,几款软件用下来,无论是操作流程,还是出图效果和速度,Photoscan的表现都要好于其他几款。
Photoscan是俄罗斯的东西,正版价格4万左右,但是提供30天全功能试用。
对电脑硬件的依赖也比其他要低。
很多人在用的Pix4DMapper是瑞士一家公司的产品,功能上和Photoscan大同小异,但是正版价格可以买2套Photoscan了,而且使用下来,感觉对电脑的要求比Photoscan高不少,16G内存的电脑频频弹窗警告。
PhotoScan优势盘点:支持倾斜影像、多源影像、多光谱影像的自动空三处理支持多航高、多分辨率影像等各类影像的自动空三处理具有影像掩模添加、畸变去除等功能能够顺利处理非常规的航线数据或包含航摄漏洞的数据支持多核、多线程CPU运算,支持CPU加速运算支持数据分块拆分处理,高效快速地处理大数据操作简单,容易掌握处理速度快不足:缺少正射影像编辑修改功能缺少点云环境下量测功能功能介绍:1.软件安装(安装大概15分钟)官网下载软件,安装。
PhotoScan处理无人机航拍照片基本流程(中文版)

1)若需要更高的测量精度或者无pos的照片建立的工程需要进行地理处理或空间量测,就需要添加marker控制点标记,并配置相应的坐标系 。
若在拍照时放置了软件打印的人工标记(ToolsMarkersPrintmarkers),则可自动检测标记(Tools→Markers→Detectmarkers),然后对应标记名称 导入控制点实测数据。
PhotoScan处理无人机航拍照片基本流程
内存需求
8G可以处理500张以内。(以佳能单反5D markⅢ照片为例)
准备工作
Workflow工作流程菜单AddPhotos…按照拍摄顺序添加照片;
Reference参考面板 import导入pos数据,然后 Convert将WGS84经纬度坐标值(单位:度)转换为投影平面坐标(比如WGS84UTM,单位:米);
若对照片设置了mask其余默认keypointlimittiepointlimit1若需要更高的测量精度或者无pos的照片建立的工程需要进行地理处理或空间量测就需要添加marker控制点标记并配置相应的坐标系marker和或比例scalebar若在拍照时放置了软件打印的人工标记toolsmarkersprintmarkers则可自动检测标记toolsmarkersdetectmarkers然后对应标记名称匚导入控制点实测数据
Photos照片窗口右键菜单Estimateimagequality…评估全部照片质量,在保证重叠度的前提下将Quality质量小于0.8的照片Remove删除掉;
根据实际需要,可用工具栏上的蒙版源自置工具 对照片上目标对象的干扰背景区域设置mask蒙版;
AlignPhotos
对齐照片
Photoscan工作流程
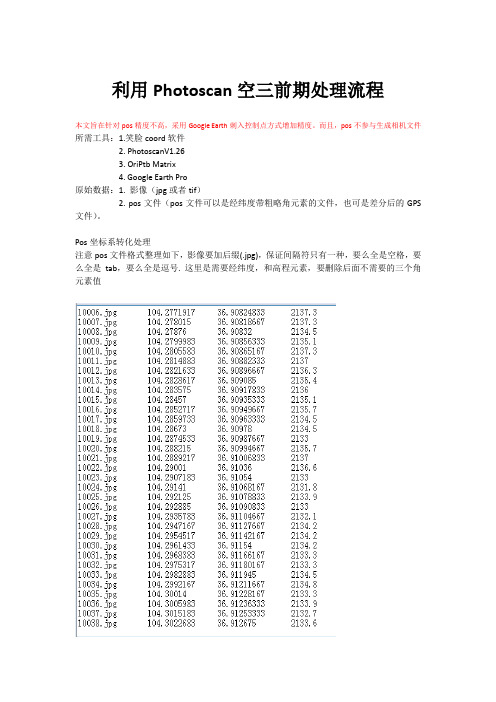
利用Photoscan空三前期处理流程本文旨在针对pos精度不高,采用Google Earth刺入控制点方式增加精度。
而且,pos不参与生成相机文件所需工具:1.笑脸coord软件2. PhotoscanV1.263. OriPtb Matrix4. Google Earth Pro原始数据:1. 影像(jpg或者tif)2. pos文件(pos文件可以是经纬度带粗略角元素的文件,也可是差分后的GPS 文件)。
Pos坐标系转化处理注意pos文件格式整理如下,影像要加后缀(.jpg),保证间隔符只有一种,要么全是空格,要么全是tab,要么全是逗号. 这里是需要经纬度,和高程元素,要删除后面不需要的三个角元素值这里我们需要将pos 大地坐标转化为平面坐标具体操作如下1.打开笑脸coord软件,设置-地图投影-2. 在投影设置里,选择高斯六度带,中央子午线设置105,其他保持不变3.点击文件转化,选择文件格式:点号经度纬度如果没有,点自定义格式设置,然后设置依次设置名称,扩展名,分隔符号,数据列表如下完成点击新建4.导入需要转换的pos文件,进行转化修改得到文件扩展名为.txt进行下一步正式处理处理流程:1. 打开photoscan,工作流-添加照片2. 在参考(reference)窗口选择导入,导入pos文件3. 选择好间隔符后,检查下X和Y值没有搞混,X为6位或8位,Y是7位,点确定4. 在主窗口界面可以浏览pos点概况5. 工作流-对齐照片,精度推荐用Low(速度快,普通和高匹配速度太慢),如果导入过pos 文件,下面可以选择参考(reference)模式,高级设置里的关键点限制和连接点限制最多不要超过默认值的2倍,也就是80000和2000。
6.检查对齐照片精度,精度小于5m说明Pos精度比较好,可以用于产生相机文件,这里由于精度不高,错误值比较大,此时采取不导入pos,产生相机文件7.当第6步中的错误有超过5的(accurac为默认的10.0情况下),则不能依据POS文件来输出自检校的相机文件。
无人机运行手册航拍像处理与后期编辑方法

无人机运行手册航拍像处理与后期编辑方法现如今,无人机技术的快速发展已经成为影视制作、航拍摄影等行业的热门选择。
无人机具有飞行灵活、风格独特、视角新颖等优点,受到了众多爱好者和专业人士的青睐。
然而,除了掌握无人机的飞行技巧外,对于航拍照片的后期处理也是至关重要的一环。
本文将详细介绍无人机运行手册航拍像处理与后期编辑方法,指导读者如何利用无人机拍摄出高质量的航拍照片并进行后期编辑。
无人机航拍照片的摄影技巧在进行无人机航拍拍摄时,首先需要注意机身的稳定性,避免飞行过程中摄像头抖动,影响画面清晰度。
其次,选择合适的拍摄时间和角度,根据光线、天气等因素确定最佳拍摄时机,保证拍摄画面的色彩饱满、层次分明。
另外,掌握好航拍高度和速度的搭配,保证画面的稳定性和流畅性,让观众在观赏航拍作品时有身临其境的感觉。
航拍照片的后期处理1. 图片导入与选片:在将航拍照片导入电脑后,首先进行全盘备份,避免数据丢失。
然后根据实际需求对照片进行选片,筛选出拍摄质量高、画面有特色的照片进行后期处理。
2. 色彩与光影调整:通过后期调整软件,可以对航拍照片的色彩和光影方面进行优化。
比如增加对比度、调整曝光度、调节饱和度等,让画面更加生动有趣。
3. 构图与剪裁:在进行航拍照片的后期编辑时,可以根据构图原则对画面进行裁剪和调整,突出画面主体,增强画面的层次感与美感。
4. 滤镜与特效添加:为了让航拍照片更具艺术感和表现力,可以适度添加滤镜与特效,调整画面的色调和氛围,使得照片更富有创意和个性。
5. 后期精细处理:最后,在所有基本处理完成后,还可以对航拍照片进行一些精细化的处理,比如去除瑕疵、修饰细节,提高照片的品质和观赏性。
总结通过本文的介绍,相信读者对于无人机航拍像的处理与后期编辑方法有了一定的了解。
无人机航拍技术的应用范围越来越广,对于爱好航拍摄影和影视制作的朋友们来说,掌握好航拍照片的拍摄技巧和后期处理方法是非常必要的。
希望读者在实践中能够灵活运用本文所述方法,拍摄出更符合自己风格和需求的航拍照片,展现出无人机航拍的魅力与新意。
PhotoScan教程一生成正射影像和DEM(很全面详细的教程)
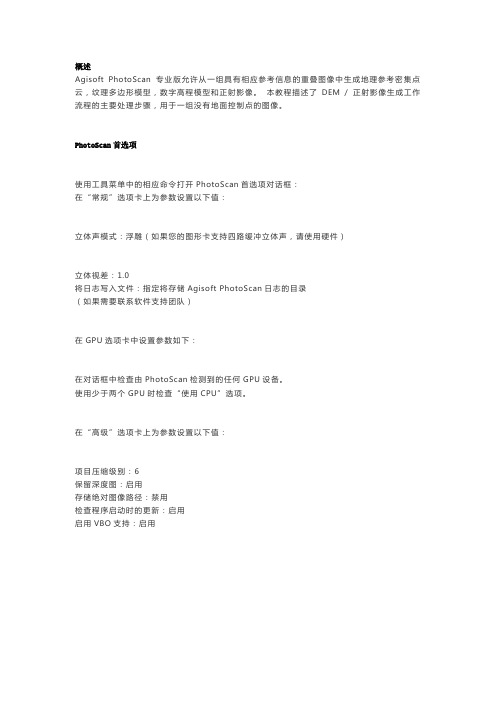
概述Agisoft PhotoScan 专业版允许从一组具有相应参考信息的重叠图像中生成地理参考密集点云,纹理多边形模型,数字高程模型和正射影像。
本教程描述了DEM / 正射影像生成工作流程的主要处理步骤,用于一组没有地面控制点的图像。
PhotoScan首选项使用工具菜单中的相应命令打开PhotoScan首选项对话框:在“常规”选项卡上为参数设置以下值:立体声模式:浮雕(如果您的图形卡支持四路缓冲立体声,请使用硬件)立体视差:1.0将日志写入文件:指定将存储Agisoft PhotoScan日志的目录(如果需要联系软件支持团队)在GPU选项卡中设置参数如下:在对话框中检查由PhotoScan检测到的任何GPU设备。
使用少于两个GPU时检查“使用CPU”选项。
在“高级”选项卡上为参数设置以下值:项目压缩级别:6保留深度图:启用存储绝对图像路径:禁用检查程序启动时的更新:启用启用VBO支持:启用添加照片要添加照片,请从工作流菜单中选择添加照片...命令或单击位于工作空间工具栏上的添加照片按钮。
在添加照片对话框中浏览源文件夹并选择要处理的文件。
点击打开按钮。
加载相机位置在这一步,将来模型的坐标系使用相机位置进行设置。
注意:如果相机位置未知,则可跳过此步骤。
然而,对齐照片程序在这种情况下需要更多时间。
使用“查看”菜单中的相应命令打开“参考”窗格。
单击参考窗格工具栏上的导入按钮,然后在打开对话框中选择包含摄像头位置信息的文件。
最简单的方法是加载简单的由字符分隔的文件(* .txt,* .csv),该文件包含每个摄像头位置的x坐标和y坐标以及高度(摄像机方向数据,即俯仰角,俯仰角和偏航角值)也可以导入,但数据不是强制性的参考模型)。
在“导入CSV”对话框中,根据文件的结构指示分隔符,然后选择要从其开始加载的行。
请注意,#字符表示在对行进行编号时不计数的注释行。
通过在对话框的列部分设置正确的列号,为程序指示在每列中指定了什么参数。
photoscan无人机使用手册
photoscan无人机使用手册这是一份关于使用Photoscan无人机的详细手册。
本文档旨在为用户提供使用Photoscan无人机的详细指南和操作步骤。
请按照以下章节逐步进行操作。
1、准备工作1.1 确保无人机和遥控器电池已充好电。
1.2 确保相机设备已安装并正确连接到无人机上。
1.3 检查无人机和相机设备是否安装最新的软件和固件版本。
2、启动无人机2.1 打开无人机电源开关。
2.2 检查遥控器与无人机的连接状态。
2.3 保持无人机在开阔的空地上启动。
3、飞行前检查3.1 检查无人机的各个部件是否正常运作,如电机、螺旋桨等。
3.2 检查摄像头设备的稳定性。
3.3 调整相机设备的角度和视野。
4、飞行操作4.1 使用遥控器将无人机升至预定高度。
4.2 使用无人机操控器进行飞行导航和拍摄。
4.3 在飞行过程中保持无人机平稳和稳定。
4.4 按照预定的航线进行拍摄。
5、数据传输和处理5.1 将拍摄的数据传输到电脑或存储设备上。
5.2 使用Photoscan软件进行图像处理和拼接。
5.3 导出处理后的图像和地图数据。
6、故障排除6.1 如果无人机遇到异常情况或故障,立即停止飞行。
6.2 检查无人机和相机设备的连接状态和电池寿命。
6.3 参考无人机和Photoscan软件的故障排除指南。
7、安全注意事项7.1 在飞行过程中遵守本地的无人机飞行规定和法律。
7.2 不要在需要特殊许可的区域飞行。
7.3 在飞行过程中保持周围环境的安全。
附件:- 无人机和相机设备的操作手册- Photoscan软件的使用指南法律名词及注释:- 无人机:指无人驾驶的航空器,包括其附件和相关设备。
- 飞行规定:指监管无人机飞行活动的相关法律和规定。
- 特殊许可区域:指需要特殊许可才能飞行的区域,如机场、军事基地等。
感谢您使用本文档,希望可以帮助您顺利使用Photoscan无人机。
如有任何疑问或需要进一步帮助,请参考附件中的操作手册或联系我们的客服人员。
PHOTOSCAN软件操作培训

模型优化
ห้องสมุดไป่ตู้模型优化
对三维模型进行优化,以提高模型的 质量和性能。
优化技术
优化工具
Photoscan提供了多种模型优化工具, 如自动优化、手动调整等,可以根据 需要选择使用。
包括减少冗余顶点、优化三角形面片、 压缩模型等。
导出模型
导出模型
将三维模型导出为其他软件或平 台可用的格式。
导出格式
常见的导出格式包括OBJ、FBX、 PLY等,可根据需要选择合适的格 式。
文物修复案例
总结词
photoscan软件在文物修复领域的应用,能够提高修复的精度和效率,为珍贵文 物的保护提供有力保障。
详细描述
对于一些破损的文物,如瓷器、陶器等,可以通过photoscan软件采集多角度照 片,进行三维重建。这个三维模型可以用于文物的虚拟修复和数字化保存,既避 免了直接接触文物可能造成的二次损坏,也提高了修复的精度和效率。
辨率和颜色模式等。
启动软件
双击桌面上的photoscan图标
在计算机桌面上找到photoscan软件的快捷方式或应用程序图标。
等待软件启动
等待片刻,直到photoscan软件完全启动。
软件界面概览
打开软件后,可以看到photoscan的主界面,包括菜单栏、工具栏、图像预览窗口等。
03
基础操作
导入图片
•·
1. 文件格式不正确: 确保您导入的图片 格式是photoscan软件所支持的,如 JPEG、TIFF等。
三维模型构建失败
•·
2. 软件设置不当: 检查软件的各 项参数设置,如相机内参、畸变 校正、对极线等,确保设置正确 。
三维模型构建失败可能是由于数 据质量差、软件设置不当、硬件 性能不足等原因。
photoscan专业版1.4中文教程
photoscan专业版1.4中文教程PhotoScan1.4中文教程目录1.拍摄照片 (1)设备 (1)相机设置 (1)对象/场景要求 (1)图像预处理 (2)捕捉场景 (2)限制 (3)2.一般工作流程 (12)首选项设置 (12)加载照片 (13)对齐照片 (17)建立密集的点云 (22)构建网格 (24)建立模型纹理 (27)建立瓦片模型 (29)建立数字高程模型 (25)建立正射影像 (31)保存中间结果 (32)导出结果 (33)3.引用 (43)相机校准 (43)设定坐标系 (45)优化 (51)使用编码和非编码目标 (55)4.测量 (57)在模型上执行测量 (57)在DEM上执行测量 (58)植被指数计算 (60)5.编辑 (64)使用蒙版 (64)编辑点云 (68)分类密集的点云 (71)编辑模型几何 (72)形状 (76)正射影像拼接线编辑 (77)6.自动化 (79)使用块 (79)4D处理 (83)Python脚本 (85)7.网络处理 (87)概观 (87)群集组件 (87)群集设置 (88)热键 (105)B.支持的格式 (108)图片 (108)相机校准 (108)相机飞行日志 (108)GCP位置 (109)内部和外部相机的方向参数 (109)联系点 (109)稀疏/密集点云 (109)网格模型 (110)质地 (110)正射影像 (110)数字高程模型(DSM / DTM) (111)瓦片模型 (111)形状和轮廓 (111)C.相机型号 (115)相机 (115)鱼眼相机 (115)球形摄像机 (116)第1章拍摄照片在将照片加载到PhotoScan之前,需要获取用于重建三维模型的照片。
只要遵循一些特定的拍摄指南,照片可以由任何数码相机拍摄。
本节介绍了拍摄和选择为3D模型生成提供最合适数据的照片的一般原则。
设备•使用具有相当高分辨率(5MPix或更高)的数码相机。
无人机航拍360全景照片PS补天教程
无人机航拍360全景照片PS补天教程
360全景拍摄是最近无人机航拍的拓展应用。
许多朋友开始携带无人机加入到自己的旅行,随着技术的熟练,无人机功能的丰富,大家也开始慢慢开发一些新的应用,全景摄影就是其中之一。
有朋友带着无人机外出,制作了一个带全景演示的电子地图,可以随时回忆旅途中的美丽景色。
和地面全景拍摄不同,空中全景的拍摄对于镜头节点要求并不高,所以在前期拍摄和拼接完全可以用大疆自带的软件进行。
如果觉得自动生成的效果不好,也可以选择使用PT gui手动拼接一张过亿像素的全景照片。
无人机航拍照片由于距离景物远,定点效果好,不需要像地面拍摄一样,进行拍摄前复杂的节点调节,和拍摄后繁琐的控制点调节,就可以生成一张不错的照片。
而对于无人机全景拍摄来说,能称的上最麻烦的,让对PS不很熟悉的一些无人机玩家来说无从下手的,就是补天了。
有的朋友只能通过限制观赏角度或者简单拉伸来解决这个问题,效果就差了很多。
在这里我就做了个简易的补天教程,只要大家跟着教程一步一步调节,将会发现,补天也并不是很难得事情。
第一步,准备素材和软件。
准备一张天气不是很好,直出未补天的全景图片,一张用来补天空照片,ps软件。
这个天空效果惨不忍睹
这张全景照片是朋友帮忙拍摄,发给我后期拼接,因为大雾天气,光线漫散射比较严重,拍摄时间又比较早,太阳比较低,导致整张照片的天空惨不忍睹,还影响了部分地面景物。
Photoscan使用说明书
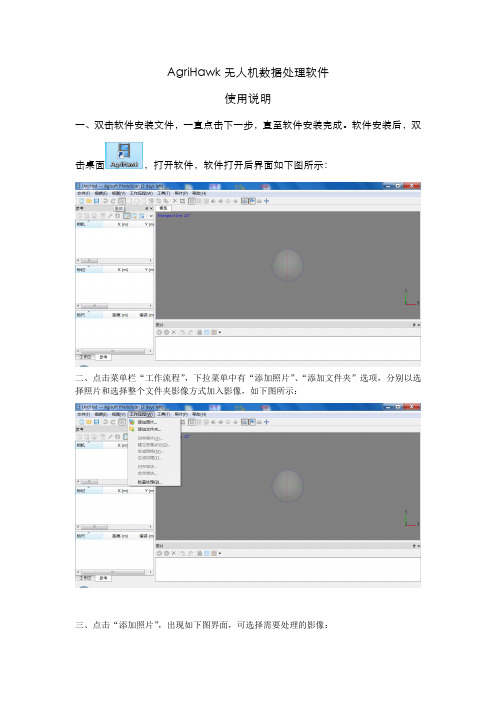
AgriHawk无人机数据处理软件使用说明一、双击软件安装文件,一直点击下一步,直至软件安装完成。
软件安装后,双击桌面,打开软件,软件打开后界面如下图所示:二、点击菜单栏“工作流程”,下拉菜单中有“添加照片”、“添加文件夹”选项,分别以选择照片和选择整个文件夹影像方式加入影像,如下图所示:三、点击“添加照片”,出现如下图界面,可选择需要处理的影像:四、选择影像后,在左侧会出现影像名列表,软件下侧会显示影像缩略图:五、双击每个缩略图,主窗口显示该张影像的大图,可以查看影像:六、如果有POS数据,点击左侧窗口“参考”栏中第一个图表,导入POS数据,若没有POS 数据可直接跳至步骤十一(POS数据为拍摄每张影像所对应的无人机位置、姿态参数,辅助拼接,拼接后的影像将具有地理坐标信息):七、点击“导入”后,弹出POS导入窗口,如下图,选择整理好的POS文档即可:八、POS导入后,选择“WGS84”坐标系统,并将各列数据与表头名称对应:九、对应好的POS界面如下图所示:十、POS数据导入后,界面中将显示POS轨迹,即无人机拍摄照片时所处空间位置:十一、点击“工作流程-对齐照片”:十二、在弹出的对话框中,精度选择“高”,成对预选选择“参考”,点击确定:十三、下图自动开始“对齐照片”处理,界面如下图,此过程只需等待,无需操作:十四、处理完成后,会生成三维点云数据,如下图所示:十五、“对齐照片”完成后,点击“工作流程-建立密集点云”:十六、在弹出的对话框中,选择所需要的质量,如下图,质量设置越高,处理速度越慢:十七,点击确定后,系统自动处理,并显示处理进度:十八、处理完成后,生成密集点云数据:十九、选择“工作流程-生成网格”,如下图:二十、在弹出的对话框中选择所需要的质量,点击确定,出现以下进度显示界面:二十一、处理完成后,生成测区光滑曲面:二十二、点击“文件-导出正射影像-导出JPEG/TIFF/PNG”,导出拼接后影像:二十三、在弹出的界面中,直接默认设置即可,点击“导出”:二十四、点击“导出”后,选择导出路径及导出文件名:二十五、点击确定后,开始导出,等待完成后,即可到相应路径下,查看拼接后正射影像。
PhotoScan处理无人机航拍照片基本流程(中文版)

PhotoScan处理无人机航拍照片基本流程Workflow工作流程菜单→AddPhotos…按照拍摄顺序添加照片;Reference参考面板→import导入pos数据,然后Convert将WGS84经纬度坐标值(单位:度)转换为投影平面坐标(比如WGS 84 UTM,单位:米);Photos照片窗口→右键菜单Estimateimagequality…评估全部照片质量,在保证重叠度的前提下将Quality质量小于0.8的照片Remove删除掉;根据实际需要,可用工具栏上的蒙版设置工具对照片上目标对象的干扰背景区域设置mask蒙版;Constrain features by mask其余默认(Key point limit制marker 或比例scalebar 1)若需要更高的测量精度或者无pos的照片建立的工程需要进行地理处理或空间量测,就需要添加marker控制点标记,并配置相应的坐标系。
✓若在拍照时放置了软件打印的人工标记(Tools→Markers→Printmarkers),则可自动检测标记(Tools→Markers→Detectmarkers),然后对应标记名称导入控制点实测数据。
✓若控制点是自然标记,则需手动在每张照片上查找每个marker标记:import导入控制点实测数据,基于对齐生成的Sparsecloud稀疏点云创建Mesh,然后先手动确定控制点在某两张照片上的位置,再借助软件自动匹配提示,核实控制点在所有照片上的位置。
2)若有实测比例尺,可以在添加完标记marker后创建配置三维空间比例尺对模型进行校正。
3)添加完控制点后,优化空三。
Reuse depth maps: No。
【注】若只出正射图,不需要其余默认。
【注】若不需要出三维模型,该步可跳过。
Build DEM创Build Orthomosaic建DEM,。
PhotoScan生成正射影像、DEM(有地面控制点)和三维模型的重建教程(1)
PhotoScan生成正射影像、DEM(有地面控制点)和三维模型的重建教程(1)PhotoScan生成正射影像DEM(有地面控制点)和三维模型的重建教程一、生成正射影像和DEM(有地面控制点)1、概述2、PhotoScan首选项使用工具菜单中的相应命令打开PhotoScan首选项对话框:在“常规”选项卡上为参数设置以下值:立体声模式:浮雕(如您的图形卡支持四路缓冲立体声,请使用硬件)立体视差:1.0将日志写入文件:指定将存储Agisoft PhotoScan日志的目录。
(如果需要联系软件支持团队)在GPU选项卡中设置参数如下:在对话框中检查由PhotoScan检测到的任何GPU设备。
使用少于两个GPU时检查“使用CPU”选项。
在“高级”选项卡上为参数设置以下值:项目压缩级别:6保留深度图:启用存储绝对图像路径:禁用检查程序启动时的更新:启用启用VBO支持:启用3、添加照片要添加照片,请从工作流菜单中选择添加照片...命令或单击位于工作空间工具栏上的添加照片按钮。
在添加照片对话框中浏览源文件夹并选择要处理的文件。
点击打开按钮。
4、加载相机位置(此次使用的御2自带POS信息,故不用此步骤)在这一步,将来模型的坐标系使用相机位置进行设置。
注意:如果相机位置未知,则可跳过此步骤。
然而,对齐照片程序在这种情况下需要更多时间。
使用“查看”菜单中的相应命令打开“参考”窗格。
单击参考窗格工具栏上的导入按钮,然后在打开对话框中选择包含摄像头位置信息的文件。
最简单的方法是加载简单的由字符分隔的文件(* .txt,* .csv),该文件包含每个摄像头位置的x坐标和y坐标以及高度(摄像机方向数据,即俯仰角,俯仰角和偏航角值)也可以导入,但数据不是强制性的参考模型)。
在“导入CSV”对话框中,根据文件的结构指示分隔符,然后选择要从其开始加载的行。
请注意,#字符表示在对行进行编号时不计数的注释行。
通过在对话框的列部分设置正确的列号,为程序指示在每列中指定了什么参数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无人机后期航片拼接软件PhotoScan详细使用教程
摘要:本文主要介绍一款无人机航片后期处理软件——AgisoftPhotoscan,手把手教你完成航片正射影像拼接、生成DEM。
PhotoScan是一款基于影像自动生成高质量三维模型的软件。
使用时无需设置初始值,无需相机检校,利用最新的多视图影像三维重建技术,就可以对具有影像重叠的照片进行处理,也可以通过给予的控制点生成真实坐标的三维模型。
无论是航拍影像还是高分辨率数码相机拍摄的影像都可以使用这个软件进行处理。
整个工作流程无论是影像定向还是三维模型重建过程都是完全自动化的。
PhotoScan可生成高分辨率真正射影像和带精细色彩纹理的DEM模型。
使用控制点可达5cm精度。
完全自动化的工作流程,即使非专业人员也可以在一台电脑上处理成百上千张航拍影像,生成专业级别的摄影测量数据。
航片拼接软件有很多,之前我们使用过PiR4D、Globalmapper、EasRUAV、Photoscan,几款软件用下来,无论是操作流程,还是出图效果和速度,Photoscan的表现都要好于其他几款。
Photoscan是俄罗斯的东西,正版价格4万左右,但是提供30天全功能试用。
对电脑硬件的依赖也比其他要低。
很多人在用的PiR4DMapper是瑞士一家公
司的产品,功能上和Photoscan大同小异,但是正版价格可以买2套Photoscan 了,而且使用下来,感觉对电脑的要求比Photoscan高不少,16G内存的电脑频频弹窗警告。
PhotoScan优势盘点:
支持倾斜影像、多源影像、多光谱影像的自动空三处理
支持多航高、多分辨率影像等各类影像的自动空三处理
具有影像掩模添加、畸变去除等功能
能够顺利处理非常规的航线数据或包含航摄漏洞的数据
支持多核、多线程CPU运算,支持CPU加速运算
支持数据分块拆分处理,高效快速地处理大数据
操作简单,容易掌握
处理速度快
不足:
缺少正射影像编辑修改功能
缺少点云环境下量测功能
功能介绍:
1.软件安装(安装大概15分钟)
官网下载软件,安装。
完成以后,可在“工具”—“偏好设置”目录下,设置语言为中文。
2.航片选取(耗时大概10分钟)
根据《低空数字航空摄影规范》对于飞行质量和影像质量的要求,“像片重叠度应满足以下要求:a.航向重叠度一般应为60%~80%,最小不应小于53%;
b.旁向重叠度一般应为15%~60%,最小不应小于8%。
”实际航线规划时,飞行人员应尽可能设置较高像片重叠率,避免出现航摄漏洞,重复飞行,减少作业成本。
无人机航摄完毕,筛选航片,剔除起飞和降落阶段航拍影像,仅保留无人机航线飞行阶段拍摄的照片。
3.新建项目(1分钟搞定)
打开PhotoScan软件,在左侧工作区点击“添加模块”按钮,添加模块,软件自动创建新项目,准备导入航片。
添加模块
4.照片导入与对齐(1~5分钟)
在软件上方工具栏,点击“工作流程”—“添加照片”,选择要拼接的照片,然后照片就进来了。
照片导入
接着点击“工作流程”—“对齐照片”,软件会根据航片坐标、高程信息,相似度自动排列照片。
对齐照片时,软件会弹窗要求选择精度,如果用于现场快速展示航片效果,可以选择低精度,实现照片快速排列。
最后点击确认,自动对齐照片。
对齐照片
5.照片拼接处理(10~60分钟)
a.生成密集点云
点击“工作流程”—“建立密集点云”,同样根据需求选择质量。
b.生成网格
点击“工作流程”—“生成网格”,表面模型选择“任意”,源数据选择“密集点云”,面数根据成像质量需求选择“高”、“中”、“低”。
c.生成纹理
点击“工作流程”—“生成纹理”,映射模式选择“正射影像”,混合模式选择“镶嵌(默认)”(此处中文版将mosaic翻译成马赛克有误),纹理大小选择“4096”。
6.拼接成果输出(5分钟)
a.生成DEM
点击“工作流程”—“BuildDEM”,参数默认,不用修改。
b.生成正射影像
点击“工作流程”—“生成正射影像”,参数默认,不用修改。
c.成果导出
拼接完毕,点击“文件”可导出拼接成果,正射影像、DEM等。