起重机防摇技术研究(标准版)
起重机智能防摇控制系统设计及应用研究
—109—《装备维修技术》2021年第13期起重机智能防摇控制系统设计及应用研究杨毅升(惠州隆泰检验检测科技有限公司,广东 惠州 516003)摘 要:随着港口业务在近几年的不断发展,生产领域将起重机作为了搬运无聊最为重要的设备,但是在实际生产阶段,负责操作起重机的相关人员通常会根据自身的经验,来对小车进行控制,以此来使其能够向水平方向移动,进而对吊重进行快速定位,由于无法实现在操作水平的统一,因此,无法对其安全性和生产效率进行有效地控制。
随着工业生产的现代化发展,为了使安全风险和生产效率能够得到降低和提升,因此从安全性和定位方面,不断地对起重机和吊重提出了更高的要求。
同时,为了给港口提供具有节能减排性地使用设备,因此桥式起重机日后,必定会采用智能化的方式来控制系统的摆动,并提升工作效率,国内外也将其作为了目前的研究热点。
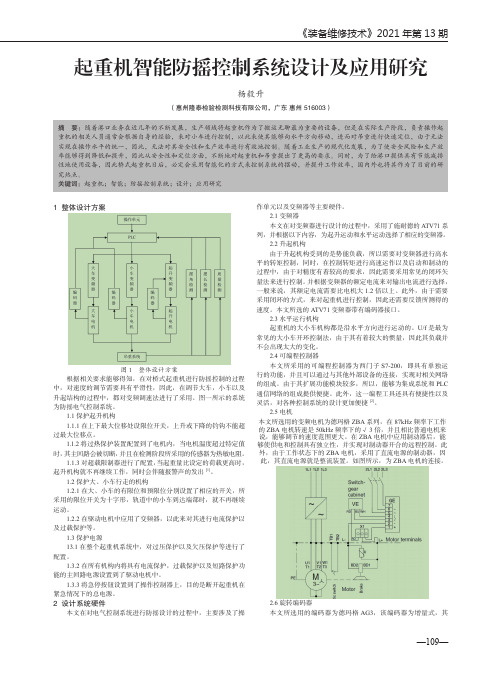
关键词:起重机;智能;防摇控制系统;设计;应用研究1 整体设计方案图1 整体设计方案根据相关要求能够得知,在对桥式起重机进行防摇控制的过程中,对速度的调节需要具有平滑性,因此,在调节大车,小车以及升起结构的过程中,都对变频调速法进行了采用。
图一所示的系统为防摇电气控制系统。
1.1保护起升机构1.1.1在上下最大位移处设限位开关,上升或下降的钓钩不能超过最大位移点。
1.1.2将过热保护装置配置到了电机内,当电机温度超过特定值时,其主回路会被切断,并且在检测阶段所采用的传感器为热敏电阻。
1.1.3对超载限制器进行了配置,当起重量比设定的荷载更高时,起升机构就不再继续工作,同时会伴随报警声的发出[1]。
1.2保护大、小车行走的机构1.2.1在大、小车的有限位和预限位分别设置了相应的开关,所采用的限位开关为十字形,轨道中的小车到达端部时,就不再继续运动。
1.2.2在驱动电机中应用了变频器,以此来对其进行电流保护以及过载保护等。
1.3保护电源13.1在整个起重机系统中,对过压保护以及欠压保护等进行了配置。
防摇控制系统在集装箱起重设备中的研究与应用

关键词 :集装箱起重设备 自动运行 ;防摇控制 系统 ;拉格 朗 E建模 ;Sm l k t i ui 仿真 n
中 图分 类号 :T 2 3 H 1 文 献 标 识 码 :A 文 章 编 号 :10 0 8 ( 0 1 1 0 5 0 0 1— 7 5 2 1 ) 0— 0 1— 5
随着集装箱运输业 不断发展 ,码 头对装卸效 率要 求越 来 越 高 ,装 卸 操 作 已成 为 一 项 越 来 越 繁
重 的工 作 。 为 了 满 足 装 卸 效 率 要 求 ,同 时 减 轻 司 机 的工 作 强 度 ,集 装 箱 起 重 设 备 正 朝 着 自动 化 运 行方 向不 断 发 展 。 其 中需 要 解 决 的 一 个 关 键 问题
没有进 行 实 际应 用 。本 文 对 小 车 负 载 系 统 进 行 建
4 结 论
本文将变频 技术与模糊 PD控 制相结合实现 I 对液 压 系统 的速 度调 节 。 利用 T 公 司 的 D P以及 I S
K e w o ds: c nti rc a e a t mai n; a is y o r ls se ; La a ga d lng; Si ui k smu ain y r o ane r n u o to nt—wa c nto y t m r g n in mo e i m ln i l t o
防 摇 控 制 系 统 在 集 装 箱 起 重 设 备 中 的研 究 与 应 用
单 磊 费 国
上海振 华 重 工 ( 团) 股份 有 限公 司 上海 集
摘
2 0 2 0 15
要 :对集装箱起 重设 备中小车定位及 负载摇 晃 问题 进行 了研究 。通 过拉格 朗 日分 析法 ,建 立 了小 车负
汽车起重机抗摇摆控制系统研究的开题报告
汽车起重机抗摇摆控制系统研究的开题报告一、研究背景随着近年来汽车起重机在工业生产中的需求日益增加,汽车起重机的各项性能要求也越来越高。
其中,抗摇摆是汽车起重机在工作过程中必须具备的重要性能之一。
汽车起重机在吊装过程中会受到风力、地面不平度、悬挂物高度、动力变化等因素的影响,容易出现晃动现象,对操作带来极大的困难,甚至会导致意外事故的发生。
因此,汽车起重机抗摇摆控制系统的研究具有广泛的应用前景和重要的理论意义。
二、研究目的本研究旨在设计一种汽车起重机抗摇摆控制系统,能够实现对汽车起重机在吊装过程中的晃动进行有效控制,保证吊装过程的安全和稳定。
三、研究内容1.汽车起重机抗摇摆控制系统的原理研究:通过对汽车起重机的结构和吊装特点进行分析,探讨汽车起重机晃动控制的原理和方法。
2.汽车起重机抗摇摆控制系统的模型建立:建立汽车起重机抗摇摆控制系统的数学模型,并进行仿真验证。
3.汽车起重机抗摇摆控制系统的算法设计:设计一种基于现代控制理论的汽车起重机抗摇摆控制算法,通过有效的反馈控制方法实现汽车起重机在吊装过程中的抗摇摆控制。
4.汽车起重机抗摇摆控制系统的实验验证:通过实际的实验验证,检验所设计的汽车起重机抗摇摆控制系统的有效性和可靠性。
四、研究意义该研究结果将为汽车起重机在吊装过程中的晃动控制提供一种新的解决途径,从而提高汽车起重机的使用效率,减少搬运过程中发生的意外事故发生率,对推广智能化制造、提高我国工业水平也将产生积极的推动作用。
五、预期结果通过本研究,预计可以开发一种高效、可靠的汽车起重机抗摇摆控制系统,实现汽车起重机在吊装过程中的稳定运行和晃动控制,有效地提高汽车起重机在工业生产中的使用效率和安全性。
同时,通过本研究的成果,还可以推动智能化制造、提高我国工业水平等方面发展。
基于吊重防摇控制的起重机快速对位关键技术研究
可以通过对起重机运行过程中的图像信息进行处理和分析,提取出与吊重防 摇控制相关的特征,从而实现对吊重的稳定控制。循环神经网络(RNN)则可以 用于处理时序数据,通过对时间序列的建模和分析,实现对吊重防摇控制的动态 预测和调整。
实验与结果分析
为了验证基于吊重防摇控制的起重机快速对位关键技术的有效性,我们进行 了一系列实验。实验结果表明,使用该技术可以使起重机的对位时间减少20%, 并显著提高了对位的准确性和稳定性。具体来说,通过对比实验,我们发现基于 吊重防摇控制的起重机快速对位关键技术可以使起重机在面对不同风速、不同负 载工况下仍能保持稳定的对位性能。同时,该技术在减小操作人员的劳动强度、 提高生产效率等方面也表现出了显著的优势。
参考内容二
一、工程概述
本工程为汽车吊起重吊装方案,旨在为一项重要设备的吊装提供安全、高效、 可靠的解决方案。工程位于市中心,周边建筑密集,交通繁忙,因此需要精心组 织,确保吊装过程安全有序。
二、吊装设备选择
根据设备尺寸、重量、吊装高度以及现场环境条件,我们选择了一台50吨的 汽车吊进行吊装作业。该汽车吊性能稳定,操作灵活,能够在狭窄的空间内进行 吊装作业。
基于吊重防摇控制的起重机快速对 位关键技术研究
目录
01 引言
03 基于机器学习的方法
02 吊重防摇控制技术 04 基于深度学习的算法
目录
05 实验与结果分析
07 参考内容
06 结论与展望
引言
起重机是一种广泛应用于建筑、物流、造船等行业的重大装备,其作业效率 和质量直接影响到工程建设和生产过程的顺利进行。在起重机的工作过程中,快 速准确地完成货物或材料的对位和搬运是非常重要的。然而,由于起重机在运行 过程中可能受到多种因素的影响,如风力、惯性力等,使得对位控制变得具有一 定的挑战性。为了解决这个问题,本次演示将探讨基于吊重防摇控制的起重机快 速对位关键技术。
集装箱起重机吊具防摇和防扭技术分析

随着大型集装箱船的持续增多,有更多的码头选择应用大型集装箱起重机,以满足更大高度的作业要求。
根据集装箱起重机作业的特征分析,随着高度的不断增加,吊具摆动的问题会更加严重。
一般吊具出现前后方向的晃动时,司机可以通过控制小车将其趋于稳定。
但是,对于顺逆时针的旋转扭动,司机无计可施。
尤其是随着自动化水平的提高,很多码头集装箱装卸均是自动化作业,对于吊具的摆动没有有效的应对方法。
为解决此问题,需要有专业的技术作为支持,通过设计改造消除吊具的摇晃与扭动,从而满足码头集装箱装卸作业要求。
1 影响集装箱起重机吊具摇动因素分析吊具摇动是集装箱起重机作业过程中的常见问题,对作业效率、安全以及操作舒适性等影响严重。
想要在规定时间内完成所有装卸任务,必须采取措施消除吊具摇动的隐患。
结合集装箱起重机结构特征分析,利用钢丝绳连接吊具与小车。
现场装卸作业时,由小车运动机构驱动小车产生动作,相应的通过钢丝绳吊具也会保持一定的加速力动作。
这种情况下虽然小车停止,但是小车会继续动作产生摇动。
以停止动作的小车为中心进行分析,将连接小车与吊具的悬垂钢丝绳看作柔性绳子,以吊具为质点,吊具的摇动可以简单看做单摆模型,因此判断无法完全避免集装箱起重机吊具的摇动。
实际装卸作业中需要由司机操作来控制吊具,尽量消除吊具摇动带来的不利影响,顺利完成集装箱的定位装卸。
在此情况下想要实现高效率作业,需要解决吊具摇晃摆动的问题。
在自动化或半自动化起重机设计中,防摇技术与防扭技术不可或缺,对实现码头集装箱装卸高效率、高安全作业具有重要作用。
2 集装箱起重机吊具常见减摇装置2.1 起升钢丝绳交叉缠绕为减轻集装箱起重机吊具的摇动问题,常见的方法是采用起升钢丝绳交叉缠绕的方式。
此种方法不在减摇装置范围内,本质在于通过增大钢丝绳与水平面的夹角来有效调节进入摇动状态下钢丝绳的张力与阻摇。
虽然此种方法有一定的减摇效果,但是有效性较差,尤其是在吊具高度与荷载状态不同的情况下,起到的减摇效果差异大。
矿产
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。
集装箱起重机电子防摇控制技术研究
上海交通大学硕士学位论文
scheme which requires a complex and expensive vision sensor system, this control scheme is simple and efficient.
This thesis proposes the mathematic model of the trolley and load system, analyzes the relation between the load sway and the movement of trolley, then a new anti-sway control scheme is proposed and verified by the computer simulation experiment with the help of MATLAB software. And introduces the speed control system in details include inverter, PLC and so on, finally, accomplish the hardware and software design of the whole anti-sway control system. KEY WORDS Container crane, electrical anti-sway, velocity control mode, accelerator, inverter, PLC, simulation experiment
上海交通大学 硕士学位论文 集装箱起重机电子防摇控制技术研究 姓名:肖鹏 申请学位级别:硕士 专业:机械设计及理论 指导教师:王冰
矿产
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。
集装箱桥吊防摇控制措施研究
集装箱桥吊防摇控制措施研究发表时间:2019-06-10T16:12:58.220Z 来源:《防护工程》2019年第5期作者:滕友昌1 郑波2 [导读] 多年来,岸桥为港口物流行业当中提供了不少的便利,人们用它来在岸边对船舶的众多集装箱进行着日复一日的装卸操作作业。
上海振华重工(集团)股份有限公司 201913 摘要:随着现代工业的不断发展,工业的生产规模也随之不断扩大,在机械应用当中,自动化程度也不断的提升,故此,在搬运成本费用上也水涨船高。
在物料搬运当中,起重运输技术是其中重要的组成部分。
而由于地球的百分之73都是被海洋所覆盖,故此,水上运输占有着重要组成部分。
而其中的岸边桥式集装箱起重机(又称为岸桥)在港口物流当中占有举足轻重的地位,所以,如何加以提高其作业效率,则是厂家和工业当中最为关注的焦点[1]。
关键词:现代工业;起重运输技术;岸桥引言:多年来,岸桥为港口物流行业当中提供了不少的便利,人们用它来在岸边对船舶的众多集装箱进行着日复一日的装卸操作作业。
但是在岸桥起重机升降与加减速当中,吊具最容易出现摇摆作用,据调查,每一天岸桥师傅的工作时间当中,30%时间都是用来通过自然减摇等待摇晃的时间,这样无形中给岸桥师傅们带来不必要的劳动时间浪费。
因此,在提高岸桥起重效率和减摇的措施当中,许多起重机制作产家最为头痛。
一、常见的防摇技术措施(一)传统机械防摇技术它的作用原理是在小车架安装一个防摇装置,其装置有减摇钢丝绳、力矩限制器传动链与卷筒、带单向轴的卷筒与制动器,用传统机械手段将摆动能量消耗殆尽从而实现减摇效果,加以提升作业效率。
机械防摇当中,采用的是钢丝绳缠绕方式,让吊具上牵引滑轮与车架起升滑轮形成一定的角度,再用单向轴承来控制卷筒的旋转方向,这样可以让传动轴与放绳方向相互缩合起来,可以让卷筒只能向钢丝绳收绳的方向旋转,并且在其起重操作当中,使用力矩限制器持续对减摇钢丝绳增加一定的张力,可以有效避免钢丝绳的松散状况。
吊具天车防摇系统研究
吊具天车防摇系统研究作者:李启源来源:《科学与财富》2018年第14期摘要:本文介绍了冲压车间吊具天车的防摇系统,从系统结构、数据传输及自动定位的工作原理进行了分析。
关键词:CATS控制机;PLC;角度传感器;S120变频器1.系统结构天车的电子防摇控制系统采用CATS控制机对防摇摆功能进行计算与控制,它可在复杂的工作任务下,实现短周期,高精度控制变频器的调整电机运行速度。
系统中的配有西门子DP/DP耦合器,通过耦合器与起重机电控系统的PLC进行数据信息实时交换。
防摇系统采用的红外线角度传感器对起升机构的摇晃度进行测量,同时还配有2个绝对式编码器对大/小车的位置进行测量。
并通过PROFIBUS总线将测量数据传输给CATS控制机进行处理。
CATS控制机将采集的数据通过专门函数算法进行计算,并将计算的结果转换为速度给定信号通过PROFINET实时的传送给S120变频器,S120变频器根据给定的速度信号快速对运行电机进行加减速调节,最后达到防摇摆的功能。
2.数据传输如图2所示,行车PLC借助功能块FC65生成数据存储在DB块DB100中,CATS系统通过PN/PN连接器读出该数据并进行内部处理。
相反方向上CATS系统再通过PN/PN连接器里输入信号至DB210。
PLC再次通过功能块FC66从BD210上读出数据并且接收使用此信号实现变频器的行驶。
3.自动定位CATS系统的位置数据由起重机PLC进行监控,通过这种系统数据的匹配,可以使起重机在接近任意区域限位及大车运行轨道端部时,实现先减速后停止控制,防止在高速运行情况下突然停止而产生冲击导致所吊负载的晃动。
同时自动定位模式下,可以通过采集起重机的实时运行速度以及实际位置与目标位置的距离信息,将采集到的实时速度与实时距离进行运算处理,通过运算结果来控制S120变频器在接近目标定位位置时做最合适的减速曲线,此时防摇系统所带的绝对式编码器只提供用于速度减速曲线计算的实际位置与目标位置的距离数据,定位测量还是通过激光测距仪进行定位控制。
桥式起重机智能防摇控制研究

桥式起重机智能防摇控制研究
徐勇;龚旭;张智华;沈鼎文
【期刊名称】《机电产品开发与创新》
【年(卷),期】2024(37)3
【摘要】桥式起重机作为港口重要装卸工具,影响装卸效率的关键因素是桥式起重机的防摇技术。
本文针对防摇控制的问题,将桥式起重机运行系统作为研究对象,通过运行机理建立了数学模型,计算分析桥式起重机防摇控制的影响因素,设计了相应的智能防摇控制系统,进行了对比试验,模糊控制更适合起重机防摇控制,该策略以小车实际输出位置与参考位置之差作为控制量,同时将负载的摆角也作为控制量,形成双闭环控制。
通过仿真对比分析,可以实现对小车位置和负载摆角的有效控制,达到在有限时间内快速稳定的控制要求。
【总页数】4页(P97-100)
【作者】徐勇;龚旭;张智华;沈鼎文
【作者单位】江苏航运职业技术学院交通工程学院
【正文语种】中文
【中图分类】TH21
【相关文献】
1.基于模糊的的桥式起重机智能防摆控制研究
2.桥式起重机智能防摆控制技术研究
3.桥式起重机智能防摆控制技术研究
因版权原因,仅展示原文概要,查看原文内容请购买。
起重机防摇控制研究综述
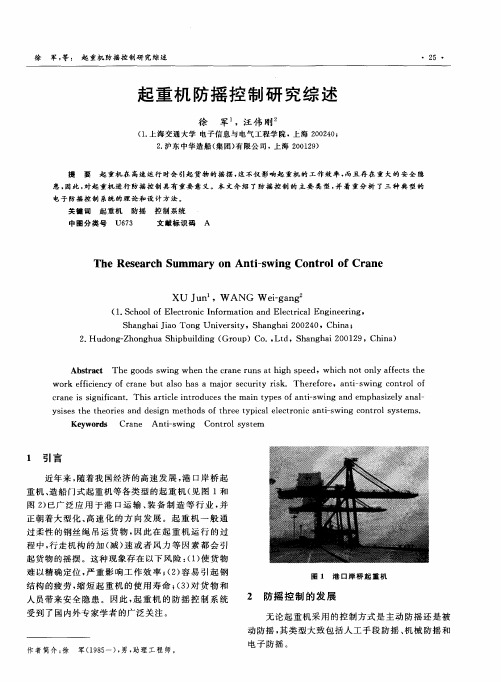
程 中, 行走机 构 的 加 ( 减) 速 或 者 风 力 等 因 素都 会 引
起 货物 的摇 摆 。这 种现 象存 在 以下 风 险 : ( 1 ) 使货 物
难 以精 确定 位 , 严 重影 响工 作 效 率 ; ( 2 ) 容 易 引起 钢 结 构 的疲劳 , 缩 短起 重 机 的使 用 寿命 ; ( 3 ) 对 货 物 和 人 员带 来安 全 隐患 。因此 , 起 重 机 的 防摇 控 制 系 统 受到 了 国内外专 家学 者 的广 泛关 注 。
电子 防摇 控 制 系统 的 理 论 和 设 计 方 法 。
关键词
起重机
防摇
控 制 系 统
文献标识码 A
中图 分 类 号
U6 7 3
The Re s e a r c h S u mma r y o n Ant i — s wi ng Co nt r o l o f Cr a ne
c r a n e i s s i g n i f i c a n t .Th i s a r t i c l e i n t r o d u c e s t h e ma i n t y p e s o f a n t i — s wi n g a n d e mp h a s i z e l y a n a l —
2 6・
造 船 技 术
2 0 1 3年 第 2期 ( 总第 3 1 2期 )
图 2 造 船 门 式 起 重 机
2 . 1 人 工 防 摇
人 工 防摇是 防 摇 控制 的最 初 阶段 , 也 是最 简 单
的阶段 。该 阶段 的防摇 主要 是通 过具 有 丰 富操作 经
图 3 液 压 系 统 防 摇 示 意 图
安全管理之起重机防摇技术

提升设备使用寿命
03
起重机防摇技术能够减少吊重对起重机的冲击和磨损,从而延
长起重机的使用寿命。
05
安全管理中起重机防摇 技术改进方案与建议
针对现有问题提出改进方案
传感器技术融合
自动化控制系统
采用高精度传感器和先进的算法,实时监 测起重机的运行状态,对摇摆进行精确控 制。
研发智能化控制系统,实现起重机自动调 整姿态、速度和加速度,降低人为操作引 起的摇摆。
运营效率。
02
起重机防摇技术原理及 分类
起重机防摇技术基本原理
01
02
03
抑制吊重摆动
通过检测吊重的摆动,采 取相应的控制措施,抑制 吊重的摆动,使其尽快平 静下来。
提高定位精度
防摇技术的应用可以显著 提高起重机的定位精度, 从而提高工作效率和安全 性。
改善工作环境
防摇技术可以减少吊重摆 动对周围设备和人员的影 响,从而改善工作环境。
机械式防摇技术
具有结构简单、工作可靠、维护方便等特点,适用于各种工作场景,尤其适用于大吨位、 高速度的起重机。
电气式防摇技术
具有控制精度高、响应速度快、适应性强等特点,适用于需要精确定位、高效率的工作场 景,如自动化生产线、港口物流等。
液压式防摇技术
具有承载能力强、平稳性好、可靠性高等特点,适用于大型工程、重型设备吊装等场景。 同时,液压式防摇技术还可以与其他防摇技术相结合,形成组合式防摇系统,提高防摇效 果。
安全管理之起重机防 摇技术
汇报人: 日期:
目录
• 引言 • 起重机防摇技术原理及分类 • 起重机防摇技术现状及发展趋势 • 安全管理中起重机防摇技术应用实践 • 安全管理中起重机防摇技术改进方案与建
岸边集装箱起重机大车方向防摇的研究
drc o a encr e u. h ao s f wa n s esoeb sdc na e ae i t nh s e a i o tT e e sn y ga r-ae o t n r rn ei b rd r os i h t h i c
i u ni r n lz d. e c un e me s r sa epu o wa d s h a p i zn o to sr n ng a e a a y uc so tmii g c n r l pa a t r fto ly d i i ,a i g h rz n a up o to o me a r mee s o le rv ng dd n o o tls p r ff r rbe m,r ie h rz ntl r i as o o a i i i iy ec I t ln i mplme td rg d t t . f hep a si e n e i wou dr d c wa i g o r U y t l e u es y n fto e .
究得就 较少 。随着 岸桥 的大型化 和高速 化 ,大车
方 向的晃动 问题越 来越 突 出 ,研 究解 决岸 桥 大 车
及 提 高 运 输 能 力 , 生 了集 装 箱 船 舶 不 断 大 型 催 化 。集装 箱船舶 大型化 效益 的发挥 ,有赖 于快速
港 口科技 ・ 科研与技革
的船 舶周转 。因此 ,港 口需要有 较 高 的装 卸 作业 到 3 5m,前 伸距 为 3 n 9r,后 伸距为 1 7m,属 于
Ke r s ot h rd ae n ie a e s yn —g is rl y t c r ywo d :p r soe - sdc t n r r wa ga a t ol s u t e b oa cn i n t e r u
安全管理之起重机防摇技术
摇摆不仅会影响起重机的稳定 性和使用寿命,还可能对周围 环境和人员安全造成威胁。
摇摆可能导致起重机无法准确 对位,影响工作效率,甚至引 发安全事故。
防摇技术的必要性
为了确保起重机的安全运行和稳定性,防止摇摆 现象的发生,采用防摇技术是必要的。
防摇技术可以减少起重机在工作过程中的摇摆幅 度,提高定位精度和作业效率。
持续改进
企业应持续改进起重机防摇技术,提高安全 性能和可靠性,以满足国际安全标准的要求 。
05
安全事故案例分析
国内外典型案例介绍
国内案例
某钢铁厂在吊装作业中发生起重机失 控事故,导致现场人员伤亡和设备损 坏。
国外案例
某石油钻井平台在起重作业中发生起 重机钢丝绳断裂事故,造成人员伤亡 和环境污染。
算法优化
研究更高效、稳定的控制算法,提高起重机防摇系统的响应速度 和稳定性。
复合控制
结合多种控制方法,如阻尼控制、主动控制等,以实现更全面的 防摇效果。
智能化、远程监控技术的应用
智能化
通过集成AI技术,实现起重机的自主防摇、故障诊断和预测性维护等功能。
远程监控
借助物联网和云计算技术,实时监测起重机的工作状态和防摇系统性能,提高管理效率和安全性。
3
及时更新
企业应及时了解并更新国家和地方的相关法律法 规和标准,确保安全生产与法律法规和标准保持 一致。
国际安全标准与认证
国际安全标准
企业应遵循国际安全标准,如ISO、OHSAS 等,确保起重机防摇技术的安全性和可靠性 。
认证机构
企业应选择具有权威性和公信力的认证机构,对起 重机防摇技术进行认证,确保符合国际安全标准。
事故原因分析
设备维护不当
岸边集装箱起重机防摇及速度控制研究

专题研 究
毒
SPECI RESEARCH AL
岸 边 集 装 箱 起 重 机 防摇 及 速 度 控 制研 究
苏
( 同济大 学
晴 ,张
氢
209 ) 0 0 2
机 械 工程学 院 ,上海
[ 要] 主 要研 究岸边 集装 箱起 重机 的防摇 及速 度 控制 。首 先 由输入 输 出线性 反 馈 得 到一 个非 交 互系 摘
警
X
r
( | )
l l l
一 L
图 2 解 耦 后 的非 交 互 系 统
度 仅受控 制 的影 响 ,吊重绳 长及 其 提 升速 度 仅 受 控制 “ 。的影 响 。变 量 (, ) 由 “ 控制 ,但 是
2 输 入输 出线 性反 馈
取小 车位移 和吊重绳 长作为输 出
吊重晃 动和准 确定位 是提 高工作 效率 和 安全 性 ,
以及 实现码 头 自动 化 装 卸 的关 键 环 节 。一 般 来说 , 岸桥 1 个工 作周 期包 括 吊重起 升小 车加 速 、平稳 行
驶 和小 车减 速 吊重 下 降 3 阶段_ 。本文 主要 考 虑 个 1 ] 在第 1 工作 阶段 中 的防摇 和速度 控 制 ,控 制 目标 个 主要是 当小 车 到达 指 定 速 度 时 ,小 车 加 速 度 和 吊
受 到状 态 (,z 的 影 响 。 因此 采 用 如 下 的 控 制 z )
方案 :将系统 分 解 成 两 个 系 统 ,子 系统 1由 变 量 ( ,0 ) 构 成 ,仅 由输 入 “ , , 控 制 ,而 将
( ,z z )看成 是扰 动输 入 ,对 于不 同 的 (,z z )状
几种防摇摆装置在起重机上的应用研究

几种防摇摆装置在起重机上的应用研究摘要:大型起重机从诞生开始就广泛应用于各个领域,并且衍生出来了各种型号的起重机。
即使这样,关于起重机起吊时的摇摆问题依旧存在,且严重影响了起重机的工作效率和使用寿命。
为此我国为防起重机摇摆采取了各种方式,现阶段比较常见的有手动式防摇摆、机械式防摇摆,电子式防摇摆。
本文主要讨论的是这几种防摇摆装置在起重机上的应用和研究。
关键词:起重机:防摇摆装置;应用与研究;前言人类迄今为止一共经历了三次工业革命,第一次工业革命让蒸汽机械进入了人们的生活,第二次工业革命让电力机械进入了人们的生活,而第三次工业革命让人们进入了数字化时代。
每次工业革命的爆发都会引起技术的更新换代,而我们今天要讨论的起重机上的防摇摆装置也是随着工业革命的大爆发而缓慢发展的。
起重机最早的原型最早出现在公元前10年,然而从他诞生开始,摇摆问题就一直伴随着他,到了近现代依旧是一个很大的难题。
起重机工作时产生的各种力直接导致了摇摆的产生,严重影响着起重机的工作效率和使用寿命,因此解决起重机的摇摆问题势在必行。
现阶段常见的几种起重机防摇摆方式有3钟,分别是手动防摇摆、机械防摇摆,电子防摇摆。
1手动防摇摆顾名思义,手动防摇摆就是依靠操作员的技术,在起重机起吊工程中降低行车或者吊起重物的晃动。
这种降低摇摆的方式对于操作员的技术要求特别高,同时还要了解一定的力学知识,所以,这种方式一般在实际操作中是不常见的。
手动式防摇摆的优点就是可以更加精准起吊,还可以降低行车或者塔架的载荷,提高稳定性。
但他的缺点也同样明显,因为手动防摇摆的原理就是以力卸力,这种方式可能会造成起重机动力系统的损伤,还可能会损伤一些起重机电子元件。
而且,因为对操作员的要求比较高,使操作员的工作量加大,容易发生安全事故[1]。
2机械防摇摆机械防摇摆是指增加机械装置达到放摇摆的目的,机械防摇摆需要增加机械设备造成行车自重增加且价格昂贵,所以应用的地方很少。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( 安全论文 )
单位:_________________________
姓名:_________________________
日期:_________________________
精品文档 / Word文档 / 文字可改
起重机防摇技术研究(标准版)
Safety is inseparable from production and efficiency. Only when safety is good can we ensure better production. Pay attention to safety at all times.
起重机防摇技术研究(标准版)
摘要:在起重机的启动和停止以及加速和减速过程中,很容易使吊具左右或前后摆动,在一定程度上影响了起重装卸效率和提高了司机的劳动强度,因此我们要通过采用先进的防摇技术,通过实现对起重机的准确定位来起重机效率。
文章主要对当前使用比较广泛的起重机防摇技术进行了简要的探讨。
关键词:起重机;防摇技术;电子防摇
Abstract:Atthestartandstopthecranes,aswellastheprocessofac celerationanddeceleration,itiseasytomakebeforeandafterspre aderorswingaroundtoacertainextentontheimpactoftheliftingef ficiencyandimprovehandlingofthelaborintensityofthedrivers, sowewantthroughtheuseofadvancedAnti-shaketechnology,throug
htheimplementationoftheaccuratepositioningofthecranetocran eefficiency.Themainarticleonthecurrentuseofabroaderanti-sw aycranetechnologybrieflyexplored.
Keywords:crane;anti-shaketechnology;electronicanti-sway
一、前言
吊具的摇摆问题,一直是令起重行业设计和调试人员头痛的一个问题。
起重机在装卸货物时,由于其速度的变化以及外界干扰因素的影响,使吊具前后、左右的来回摆动,在影响生产效率的同时造成一定的安全隐患,最终造成严重的经济损失。
因此,研究一套起重机的吊具防摇系统,实现稳定吊具、平稳操作成为起重机制造商和研究机构一直关注的问题。
一个好的防摇系统能起良好的减摇效果,大大提高了劳动生产率。
近年来,考虑到现代起重机增加吊重防摇控制系统的必要性,对防摇控制方法的理论研究较多,但这些理论方法只要以理论研究和仿真为主导,与实际可行的物理实现还存在一定距离,很多方面的
应用还不是很理想。
二、机械式防摇技术
机械式防摇技术通过在小车架下安装防摇装置,包括减摇钢丝绳、卷筒和力矩限制器传动链及带单向轴承的卷筒和制动器,通过机械手段消耗摆动的能量以实现最终消除摇摆的目的,从而提高起重机的工作效率。
要控制吊具的摇摆,首先就必须采用合理的钢丝绳缠绕方式,使车架上起升滑轮与吊具上牵引滑轮在同一平面内偏离成一定角度;利用单向轴承控制卷筒的旋转方向,通过实现放绳方向与传动轴相互锁合,保证卷筒只能向钢丝绳收绳方向旋转;在其重机作业过程中,通过对力矩限制器加以持续通电,始终给减摇钢丝绳一个张力,将其卷起,避免减摇钢丝绳的处于松散状态。
当出现吊具摇摆情况时,通过设定弹簧力来调整制动器给减摇钢丝绳的张力,从而保证在不同情况下阻止吊具的摇摆,起到减摇效果。
吊具在下降过程中,制动器打开,单向轴承的内外圈相互锁住,由于吊具重力使每个力矩限制器受到一个反向力,该力就作为减摇
钢丝绳张紧力对减摇产生一定作用;当吊具上升时,减摇钢丝绳上少了吊具自重而引起的张紧力,此时减摇钢丝绳被力矩限制器带动卷筒不断卷起,一定程度上减少了吊具的摇摆;另外,单向轴承的内外相互分离,旋转力没有作用在轴上,轴处于制动状态,制动器由于被锁住而不起作用,因此制动器就会对吊具摇摆产生一定的阻尼作用;当吊具停止升降时,单向轴承的内外圈相互离合,轴处于制动状态,制动器被锁住,从而减少吊具的摇摆。
目前大多数机械式防摇装置都是基于这个原理,但是该防摇装置非常复杂,可靠性又不高,因此维修保养的工作量较大,而且防摇效果并不是十分理想;另外还可以通过增加悬挂系统刚性抑制摇摆,此类装置同样存在维修保养工作量大和防摇效果不理想的缺点,因此机械式防摇技术还有待于改进和提高。
三、电子式防摇技术
(一)传统控制理论分析
当起重机启动运行过程中,小车与吊具通过柔性钢丝绳连接,通过电机带动在桥架轨道上运动,同时吊具也随着小车的运动而运
动,相当于一个按照固定点移动的单摆运动。
系统存在复杂性、非线性、时变性、不确定性和不完全性等因素,因此无法获得精确地数学模型。
近年来,有关起重机防摇控制的研究是越来越多,众多国外学者都作了大量的研究,电子防摇技术成为了起重机防摇的主要研究对象,我国也从国外引进了电子式防摇技术。
由于单摆运动本身就是非线性时变运动,且其固定点不断加速、减速,这就使系统变得非常复杂,难以获得精确的数学模型。
当前采用的电子防摇技术是利用各种传感器和检测元件对一些信息进行信息搜集和检测,再将检测到的信息传送至控制系统的微机,通过处理后将最佳的控制参数提供给小车调速系统来控制小车的运行,以达到对吊具及载荷的摆动幅度的控制。
这类防摇技术可以实现对吊具摆动的控制,但是由于需要经常变化绳的长度,再加上小车电动机在运行过程中会产生一定的摩擦,因此实际应用中又出现调整小车运行速度太频繁,司机不舒服的现象,导致某些装备了电子防摇系统的集装箱起重机后来又被拆除。
而为了提高性能,传统得控制理论变得非常复杂,从很
大程度上增加了控制设备初始投资和维修费用,而且降低了系统的可靠性。
为了解决以上问题,提高电子防摇技术,学者们做了大量研究。
通过大量的研究,研制出了一个比较先进的装置。
在小车架下安装一激光、红外发射器或摄像头,以作为发射装置,另外相应得再安装一个接受装置,在吊具上架安装反射器,当吊具出现摆动的情况,接受装置会检测到吊具前后摆动的角度和角速度,从而能够准确得控制好小车的运行方向和速度,使摆动角度限制在一定的范围内,最终实现了防摇的目的。
(二)电子防摇技术的发展方向
由于于起重机系统的数学模型具有非线性特性和不确定性,常规的控制方法(如传统的机械防摇技术、目前的电子防摇系统的控制方式)往往难以奏效,因此只有不依赖数学模型且能适应不确定性的智能控制方法才适合应用到这类控制中来。
模糊控制作为能控制主要分支,通过模仿起重机司机的实际操作经验建立模糊控制规则库,控制好小车的速度及加速度,可以克服由于过程本身的不确
定性、不精确性及噪声带来的困难,当前模糊控制技术在起重机防摇的试验或仿真方面取得了一定成果,并且取得了比较满意的控制效果。
与电子式防摇技术相比,模糊控制能够实现更为理想的控制效果,但是单纯的模糊控制很难实现“隶属度函数的自动实现”和“模糊规则的自动提取”,而神经网络不但能很好地解决这两大难题,而且能够增强系统的适应能力。
模糊神经网络控制器,即FNN,是一个四层的神经网络,其中第一层为为输入层,第二层为模糊化层,第三层为规则层,第四层为输出层。
基于模糊神经网络控制器的电子防摇系统是在原来的系统中增加数字式旋转编码器和可编程智能化传感器。
数字式旋转编码器与传动轴相连,用于对小车位置和吊具高度的检测,可编程智能化传感器检测吊具摆角,因此该系统硬件非常简单,不需要对原小车控制系统做很大的调整。
转载于范文中国网。
将神经网络模糊控制技术用于防摇系统,系统能够适应不同的工作路径、载荷、吊具高度(即绳长)、大小车加速度等,又会对一
些外界干扰(如风力和断电等情况)表现出较强的鲁棒性。
要使系统获得更加可靠的控制性能,防摇控制系统正常运行前要由操作人员进行若干周期的装卸作业,以获得训练样本来训练该控制器,最终使其投入正常运行。
另外由于是采用模糊神经网络,要根据实际对象的工作特点和控制要求对网络训练前各权初值进行有效确定,在加快网络训练速度的同时为网络训练奠定了良好的基础。
目前双向防摇的电子控制系统研究还处于计算机模拟仿真阶段,单纯的模糊控制还缺乏完善的控制规则和自学能力,难以确定神经网络权值的初始值,因此需要利用几何相似、运动相似和动力相似等原理,开展模糊神经网络控制防摇系统的计算机动态仿真研究,做好对必须的检测元件在样机上的适用性的深入研究,从而使控制精度大为提高。
四、结语
一个好的防摇装置,可以避免碰撞等一系列事故的发生,大大提高了起重机的操作效率和起重机操作过程的安全性。
对起重机的防摇的实现和研究,首先要做好机械方面的防摇设计,从吊具、大
车、小车三个方面进行考虑;其次做好电气方面的设计,最终实现装置的精确控制。
在做好机械防摇的接触上,做好电气防摇,将在给顶速度下的满载吊具摆动时间控制在一个可以控制的范围内,使吊具的摇摆幅度控制在一定范围。
另外,最重要的因素取决于操作司机的人为因素,让司机去熟悉机况,在保证安全的条件下提高劳动生产率才是重中之重的事。
参考文献
[1]王磊,王为民.模糊控制理论及应用[M].北京:国防工业出版社,1997,
[2]符敦鉴.高新技术在集装箱机械上的开发和应用[J].中国港口,2003,(4).
[3]沈李建.桥式吊车模糊防摇技术[J],港口装卸,,1998,(6).
云博创意设计
MzYunBo Creative Design Co., Ltd.。