伺服转台的传动系统设计_毕业设计 精品
基于PLC的伺服系统的运动控制系统设计毕业论文设计

南京化工职业技术学院毕业论文设计题目:基于PLC的伺服系统的运动控制系统设计毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日指导教师评阅书指导教师评价:一、撰写(设计)过程1、学生在论文(设计)过程中的治学态度、工作精神□优□良□中□及格□不及格2、学生掌握专业知识、技能的扎实程度□优□良□中□及格□不及格3、学生综合运用所学知识和专业技能分析和解决问题的能力□优□良□中□及格□不及格4、研究方法的科学性;技术线路的可行性;设计方案的合理性□优□良□中□及格□不及格5、完成毕业论文(设计)期间的出勤情况□优□良□中□及格□不及格二、论文(设计)质量1、论文(设计)的整体结构是否符合撰写规范?□优□良□中□及格□不及格2、是否完成指定的论文(设计)任务(包括装订及附件)?□优□良□中□及格□不及格三、论文(设计)水平1、论文(设计)的理论意义或对解决实际问题的指导意义□优□良□中□及格□不及格2、论文的观念是否有新意?设计是否有创意?□优□良□中□及格□不及格3、论文(设计说明书)所体现的整体水平□优□良□中□及格□不及格建议成绩:□优□良□中□及格□不及格(在所选等级前的□内画“√”)指导教师:(签名)单位:(盖章)年月日评阅教师评阅书评阅教师评价:一、论文(设计)质量1、论文(设计)的整体结构是否符合撰写规范?□优□良□中□及格□不及格2、是否完成指定的论文(设计)任务(包括装订及附件)?□优□良□中□及格□不及格二、论文(设计)水平1、论文(设计)的理论意义或对解决实际问题的指导意义□优□良□中□及格□不及格2、论文的观念是否有新意?设计是否有创意?□优□良□中□及格□不及格3、论文(设计说明书)所体现的整体水平□优□良□中□及格□不及格建议成绩:□优□良□中□及格□不及格(在所选等级前的□内画“√”)评阅教师:(签名)单位:(盖章)年月日教研室(或答辩小组)及教学系意见教研室(或答辩小组)评价:一、答辩过程1、毕业论文(设计)的基本要点和见解的叙述情况□优□良□中□及格□不及格2、对答辩问题的反应、理解、表达情况□优□良□中□及格□不及格3、学生答辩过程中的精神状态□优□良□中□及格□不及格二、论文(设计)质量1、论文(设计)的整体结构是否符合撰写规范?□优□良□中□及格□不及格2、是否完成指定的论文(设计)任务(包括装订及附件)?□优□良□中□及格□不及格三、论文(设计)水平1、论文(设计)的理论意义或对解决实际问题的指导意义□优□良□中□及格□不及格2、论文的观念是否有新意?设计是否有创意?□优□良□中□及格□不及格3、论文(设计说明书)所体现的整体水平□优□良□中□及格□不及格评定成绩:□优□良□中□及格□不及格(在所选等级前的□内画“√”)教研室主任(或答辩小组组长):(签名)年月日教学系意见:系主任:(签名)年月日摘要本文采用运动控制系统,完成三菱电机杯竞赛的关于伺服电机如何实现系统的运动控制系统。
伺服电机控制实验装置设计——程序设计毕业论文

南阳理工学院本科生毕业设计(论文)学院(系):电子与电气工程系专业:自动化学生:指导老师:完成日期2011 年 5 月南阳理工学院本科生毕业设计(论文)伺服电机控制实验装置设计——程序设计Servo motor control experiment device design——programming总计:毕业设计(论文)页表格:9 个插图:12 幅南阳理工学院本科毕业设计(论文)伺服电机控制实验装置设计——程序设计Servo motor control experiment device design——programming学院(系):电子系专业:自动化学生姓名:学号:079611指导教师(职称):评阅教师:完成日期:南阳理工学院Nanyang Institute of Technology伺服电机控制实验装置设计——程序设计自动化[摘要]该系统是基于台达PLC和台达变频器的伺服电机控制系统设计,利用变频器控制异步电机,通过旋转编码器来间接的测出异步电机的速度,把速度转化为脉冲的形式送给PLC来控制伺服电机,实现伺服电机与异步电机的跟随功能,并通过人机界面的程序来控制伺服电机的转动形式与修改PLC的内部寄存器来改变伺服电机的速度,同时也要设定好伺服驱动器的内部参数以达到良好的控制效果。
[关键词]变频器;PLC;异步电机;伺服电机;控制精度Design of Servo motor control experiment device——programmingAutomation Specialty NIE Yao-huaAbstract: This system is a servo control system which designed based on Delta PLC , Delta Variable-frequency and servo motor, using Delta Variable-frequency to control asynchronous motor. Through the revolving encoder to measure the asynchro nous motor’s speed. Then translate the speed into pulse form to PLC to control servo motor, to realize the function of the servo motor tracking the asynchronous motor absolutely, and through the program of the Human Machine Interface tocontrol the servo motor’s rotating form and change the parameters of Human Machine Interface and Delta Variable-frequency Drive to change the motor speed, also need setting the servo drive internal parameters to achieve good control effect.Key words: Variable-frequency drive; Programmable logic controller; Asynchronous motor;Servo motor;Control precision;目录1 引言 (1)1.1 伺服控制技术的国内外研究现状 (1)1.2 设计内容和任务要求 (1)1.2.1设计内容 (1)1.2.2任务要求 (1)1.3 系统设计可行性分析 (2)2 系统的控制硬件原理 (3)2.1台达PLC与其工作原理 (3)2.2 台达变频器的介绍 (4)2.3 伺服驱动器的功能介绍 (5)2.4 伺服电机的工作原理 (7)2.5 人机界面的功能介绍 (8)3 台达PLC控制系统的程序设计 (10)3.1基本指令功能介绍 (10)3.2 应用指令功能介绍 (13)3.3 程序的设计思路 (16)3.4 程序的各个模块功能介绍 (17)3.4.1 程序流程图 (18)3.4.2 伺服电机正反转与加减速程序设计 (19)3.4.3 伺服电机跟随功能的程序设计 (19)4 人机界面程序介绍 (22)4.1 人机界面的设计制作 (22)4.2人机界面的程序介绍 (25)结束语: (28)参考文献 (28)附录一:控制设备硬件图 (29)附录二:控制程序梯形图 (30)致谢 (32)1 引言1.1 伺服控制技术的国内外研究现状在国外,伺服控制不仅应用于普通的工业和农业医疗等,在卫星和导弹的准确定位方面也起着越来越重要的作用,这种新型的控制系统已悄然改变着国外的生产模式。
高精密单轴伺服转台结构设计

该转台不同于普通一维转台,考虑到安装多个光栅传感器的需求,在结构设计时需要在轴向和径向方向预留出安装空间,同时在精密加工时需要保证轴系和光栅传感器转接件的同轴度等形位公差,以及轴系的轴向和径向的回转精度。转台台体设计采用常见的圆形回转体外壳设计方式,外壳和底座采用优质铝合金整体加工而成,外壳内部是空心结构,轴承、盖板等元件直接装在转台台体内部,转台三维结构示意图。本套转台的结构形式是一维单轴回转体转台,采用GCr15轴承钢材料进行精密机械轴系的加工,通过精密加工保证轴与外壳安装面椭圆度及其滑动配合间隙,轴系添加仪表油保证其灵活转动。轴系设计要求转台承载能力为3kg,由于该转台用于轴系设计及精度验证,因此转台转角范围是±360°,没有机械限位。为了使转台结构紧凑,考虑到后期可能进行的多光栅传感器安装,因此在轴向设计中预留一定光栅传感器安装余量。
3光电转台总体设计
3.1光电转台的结构形式选择
精密双轴光电转台结构形式一般为T/U/O形,U形转台负载安装于U形框架中间,整体尺寸较紧凑,负载惯量小,反应速度快,精度易保证,但存在对负载外形尺寸有严格限制的缺点。O形转台把负载完全安装于球罩内,整体外形尺寸大、质量大,结构加工工艺较复杂,可维护性较差,其优点在于密封性好、气动外形能够减小风阻。T形转台一般多个负载的两端安装,俯仰轴系尺寸较集中,但由于负载离转动轴较远,转动惯量较大。综合比较,地面静止安装一般会选用U形转台。
在轴系设计过程中,为保证各重要尺寸和相关零件配合的形位公差,考虑实际加工中工序的复杂性和加工精度,因此将轴承套、轴承间挡块等零部件的设计集成在转台外壳中,在节省空间的同时还减小了台体质量,并且在实际加工过程中进行一次性加工保证各端面间的平行度等公差,避免传统设计方法中轴承套、轴承压盖等零部件与台体分离的问题,减小后期装调难度。
高精密伺服转台控制系统的设计

高精密伺服转台控制系统的设计作者:侯铭泽邢琳来源:《理论与创新》2018年第12期摘要:在现代化技术中,尤其是车辆技术中,惯性导航系统占据非常重要的地位。
标定、测试、检验惯性导航仪表或惯性导航系统最重要的设备就是惯导测试设备,研究高精密伺服转台对于车载系统的发展有着至关重要的作用。
文章设计了采用伺服电机驱动、精密齿轮传动的高精密伺服转台的控制系统,以供参考。
关键词:导航系统;高精密伺服转台;前馈控制;圆光栅本文设计并研制了高精密伺服转台的控制系统。
该转台基于高速 DSP的采样数字控制技术为基础的前提下,采用全闭环控制系统。
其定位精度高、系统反应快、运动稳定等特点,可以满足转台位置伺服精度的要求。
本文就设计初衷、设计过程等方面对高精密伺服转台控制系统进行深度剖析,为车载方向安装高精密伺服系统提供更加有力的支持。
1 高精密伺服转台控制系统的选择目前发达国家的高精密惯性测试设备系统研发的较成熟,但其对高精密惯性测试设备采取技术封锁,所以引进是非常困难的。
即便能够引进,其价格也是十分昂贵的,和国内研制费用相比,是国内的3~5倍。
因此,自己研发高精密伺服转台控制系统不仅为中国今后高性能车载系统的研制提供必要的技术保证,还可为国家节约大量的外汇。
对高精密伺服控制系统的研究是推动高精密伺服转台发展的必经环节。
该控制系统的转台位移检测采用的是圆光栅,同时采用了双闭环随动系统。
双闭环随动系统是由数字位置环和模拟电流环共同组成的系统,其中位置控制器是带有速度前馈和加速度前馈的数字PID伺服滤波器,前馈就是对观察情况、收集整理信息、掌握规律、预测趋势,正确预计未来可能出现的问题,提前采取措施,将可能发生的偏差消除在萌芽状态中,为避免在未来不同发展阶段可能出现的问题而事先采取的措施。
根据实验表明,高精度伺服转台控制系统的转台运行1.148h,在这个运行过程中位置伺服精度在±1s的范围内,且位置伺服系统主要是用来控制被控对象的某种状态或某个过程,使其输出量能自动地、连续地、精确地复现或跟踪输入量的变化规律。
伺服电机控制系统毕业设计
由于直流伺服电动机既具有交流电动机的结构简单、运行可靠、维护方便等一系列优点,又具有直流电动机的运行效率高、无励磁损耗以及调速性能好的特点,故在当今国民经济的各个领域,如医疗器械、仪表仪器、化工、轻纺以及家用电器等方面的应用日益普及。直流伺服电动机的应用主要分为以下几类:
定速驱动机械
一般不需要调速的领域以往大多是采用三相或单相交流异步和同步电机。随着电力电子技术的进步,在功率不大于 且连续运行的情况下,为了减少体积,节省材料,提高效率和降低能耗,越来越多的电机正被直流伺服电动机逐步取代,这类应用:有自动门、电梯、水泵、风机等。而在功率较大的场合,由于一次成本和投资较大,除了永磁电机外还要增加驱动器,因此目前较少有应用。
系统给定转速由键盘输入,并能实时显示转速;功率芯片选用性能价格比较高的快速MOSFET;功率驱动选用带保护电路和过流输出的集成芯片IR2130,可实现电机的高频快速起动;系统还设置了电流采样电路,与速度反馈电路组成双闭环系统,可以实现电机的快速起动并获得良好的带负载性能,达到了设计任务书的要求。
软件方面根据直流伺服电动机的组成、脉宽调制和工作原理,结合80C196MC的硬件部分和软件编程的特点,设计了无刷直流调速系统的软件。系统软件分为主程序和中断程序两大主块,主程序完成系统的初始化, LED显示器扫描和键盘功能处理程序等部分。
进入90年代以来,随着电力电子工业的飞速发展,许多高性能半导体功率器件,如GTR、MOSFET、IGBT、MCT等相继问世,以及微处理器、大规模集成电路技术的发展,逆变装置也发生了根本性的变化。这些开关器件本身向着高频化、大容量、智能化方向发展,并出现集半导体开关、信号处理、自我保护等功能为一体的智能功率模块(正M)和大功率集成电路,使直流伺服电动机的关键部件之一―逆变器的成本降低,且向高频化、小型化发展。同时,永磁材料的性能不断提高和完善,特别是钕、铁、硼永磁材体的热稳定性和耐腐蚀性的改善,加上永磁电机研究和开发经验的逐步成熟,稀土永磁直流伺服电动机的应用和开发进入一个新阶段,目前正朝着超高速、高转矩,高功能化、微型化方向发展[3]。
方位双稳定转台伺服系统的设计与实现(精)
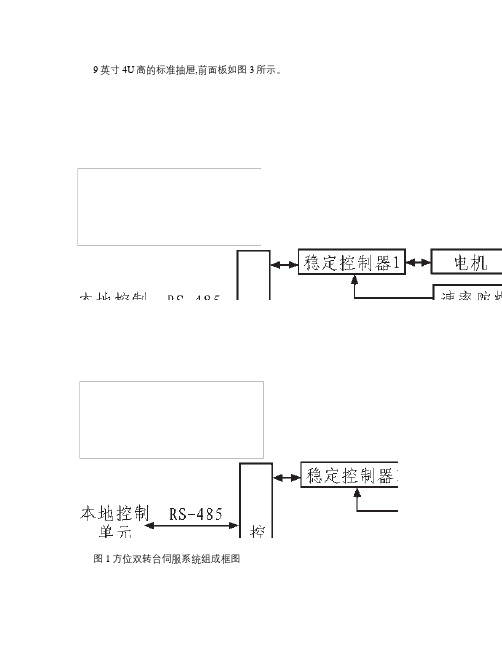
9英寸4U高的标准抽屉,前面板如图3所示。
图1方位双转台伺服系统组成框图-71-《电子设计工程》2010年第6 期图3转台控制器前面板示意图图4加固PC-104计算机好的抗振性,适用于环境恶劣的机载设备。
经过加固后的PC-104计算机如图4所示。
转台控制计算机软件采用Windows NT 操作系统[3],便于开发,具有高可靠性、安全性等特点。
软件模块主要包括实时控制和人机接口两部分。
实时控制部分主要包括数据采集、坐标变换、网络及串口通讯、控制保护等;人机接口部分主要包括显示管理、参数管理、故障监测等模块。
驱动电路由电机-测速机组、功率放大器、电流环、速度环和EMI 滤波电路组成。
主要用于功率放大、电流控制等。
驱动电机选用永磁直流力矩电机,功率放大选用线性功率放大器,动态性能好,电磁干扰小、简单、可靠。
稳定陀螺选用航空速率陀螺,构成陀螺稳定环,以隔离动载体姿态变化对跟踪的影响。
转台控制器的主要工作方式有待机、指向、程序跟踪。
3转台双转台是安装于某工程动载体上的机电设备,转台采用高精度齿轮驱动,为控制转台的重量及满足动载体设备的环境要求,选用铝合金材料柔性加工,齿轮及轴采用合金钢,轴承采用高精度圆锥滚子轴承及球轴承[4],以便于提高转台刚度和机械性能。
4稳定转台引导原理稳定转台引导原理图如图5所示,它利用惯性导航系统(INS 给出动载体所在的地理经度、纬度,动载体姿态参数(动载体相对正北方向的航向角k 、动载体相对水平面的横滚角Φ、动载体相对水平面的俯仰角θ,再根据上位机的位置指令,通过控制计算机计算两个转台的方位角,进行引导,使转台实时随动[5]于上位机指令。
根据本地控制单元的命令和动载体上的INS 测出的动载体位置经纬度和动载体姿态,可以计算出转台对目标跟踪的机体角度,假设动载体经度为λ0,纬度为φ0;目标点经度为λA ,纬度为φA ;则两点的方位角αα=tan-1sin (λA -λ0cos φAcos φ0sin φA -sin φA cos (λA -λ0(1α为大地角度,通过坐标转换成甲板角度α′α′=tan -1sin Φsin θcos EL cos (α-k +cos Φcos EL sin (α-k -sin Φcos θsin EL((2因为转台只在水平方向作一维转动,所以式(2中转台俯仰角EL 为0°,则简化式(2α′=tan -1sin Φsin θcos (α-k +cos Φsin (α-kcos Φcos (α-k(3若α′>45°且α′<135°,为转台1工作,转动角度为:若α′-90°;α′>225°且α′<315°,为转台2工作,转动角度为:α′-270°。
毕业设计论文完结版(伺服电机)

南京工程学院自动化学院本科毕业设计(论文)题目:SVPWM 在BLDC电机中的应用专业:自动化(数控技术)班级:XXXXX学号:XXXXXX学生姓名: XXXX指导教师: XXX 讲师起迄日期:2012.2~2012.6设计地点:实验楼 _Graduation Design (Thesis) SVPWM in The Application of BLDC MotorByZHU XiangSupervised byTENG Fu LinSchool of AutomationNanjing Institute of TechnologyJune, 2012摘要随着工业自动化的发展,人们对电机控制系统的性能要求越来越高。
矢量控制、直接转矩控制等先进的控制理论不断提出,而微处理器和控制器的更新换代特别是数字信号处理(DSP)的出现,使得理论成为实践。
智能化功率模块和空间矢量脉宽调制(SVPWM)技术的出现,极大的改善了电机的控制性能。
本论文重点讲述了以功能强大的DSP、智能化的功率模块和先进的SVPWM技术实现永磁无刷直流电机的开环调速。
介绍了基于DSP的硬件控制平台的组成部分。
重点分析了SVPWM技术原理、产生PWM波的控制算法和程序的实现,最后在DSP 控制平台上对其控制性能进行了验证。
本论文所有的硬件电路设计和程序编写基于TMS320F2806建立的数字控制系统。
硬件电路中的电源电路,单片DSP最小系统电路等主要部分都是经过实际的焊制和调试。
软件设计中的SVPWM程序主要采用C语言套用格式,使用CCS(C2000)编译环境下在DSP控制平台上进行了实际调试和验证。
关键词:数字信号处理器;空间矢量PWM;逆变器ABSTRACTAlong with the development of industrial automation, people on the motor control system performance demand more and more. Vector control, direct torque control and other advanced control theories have been put forward, and the microprocessor controller and the update especially digital signal processor (DSP) appear, makes theory into practice. Intelligent power module and space vector pulse width modulation (SVPWM) technology appear, greatly improved the motor control performance.This paper focuses on the function of the powerful DSP, intelligent power module and advanced SVPWM technology to achieve permanent brushless dc motor of the open loop control. Introduces the hardware platform based on DSP control of the component. Analyses the SVPWM technology principle, produce PWM waves of the control algorithm and the realization of the program, and the last in the DSP control platform on the control performance is validated.This paper all the hardware circuit design and programming TMS320F2806 based on a digital control system. Hardware circuit of the power supply circuit, monolithic DSP minimum system such as the main part of the circuit is after the actual soldering and debugging. The software design of SVPWM procedure mainly using C language to format, using CCS (C2000) compiled environment in DSP control platform on the actual commissioning and validation.Key words:DSP;Space vector PWM;inverter目录第一章绪论 (1)1.1 引言 (1)1.2 选题背景 (1)1.3 课题研究意义 (2)1.4 研究内容 (2)1.5 本文的结构 (2)第二章SVPWM的生成原理 (4)2.1 24V直流无刷电机调速控制 (4)2.2 几种PWM输出方法的比较 (4)2.3 SVPWM生成原理 (4)第三章SVPWM算法的实现 (7)3.1 扇区的判断 (7)3.2 相邻两矢量的开关作用时间 (7)3.3 切换顺序 (9)3.4 SVPWM的调速 (10)3.5 SVPWM波的死区控制 (10)第四章支持SVPWM发生器的硬件电路 (11)4.1 DSP微处理器 (11)4.2 DSP基本外围电路的设计 (12)4.3功率驱动电路 (14)4.4 SVPWM产生的硬件基础 (16)第五章SVPWM的软件设计 (18)5.1定点DSP的Q格式 (18)5.2 SVPWM控制参数的Q格式及代码实现 (19)5.3 SVPWM程序流程图 (20)5.4 实验结果分析 (21)第六章结论 (23)致谢 (24)参考文献 (25)附录A:硬件设计原理图 (26)第一章绪论1.1 引言SVPWM(Space Vector Pulse Width Modulation),即电压空间矢量脉宽调制,SVPWM是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽可能接近于理想的正弦波形。
东南大学机械设计—伺服控制多工位分度转台设计(精)
电机选型
计算过程:
转盘惯量
JL
W 8
* (D12
D2 2 )
5 * (402 8
35.52 )
1788.66kg * cm2
大齿轮惯量
J
L1
W 8
* (D12
D2 2
)
10 8
* (31.22
26.7 2
)
2101.91kg * m2
小齿轮惯量
J L2
W 8
* (D12
根据以上结果,选择电机为:
台达公司ASDA-A2—220V系列 04的伺服驱动器(400w) 及伺服机电(自带编码器),PLC也选择台达公司的DVP40EH型号
Z形板设计
保证大小齿轮轴的平行度和 良好啮合。
Z形板看做一个悬臂梁,求其挠度 最终总的挠度为
110 -1度转台伺服控制多工位分度转台设计与实践设计与实践东南大学东南大学机械工程学院机械工程学院计算机科学与工程学院背景介绍背景介绍设计目标设计目标电气控制柜设计电气控制柜设计成果演示成果演示总结总结整体方案整体方案创新简介创新简介计算机科学与工程学院工业生产中可观的生产效率是一个企业发展的关键因素
设计12个加工工位; 每个工位用时为3s,其中转动1s,停(加
工)2s; 每道工序的位置误差不超过1mm; 电气控制柜的设计和安装
大齿轮 小齿轮
i2=12
Z形板 行星齿轮 伺服电机
i1=40
电机选型
伺服选型原则: 连续工作扭矩 < 伺服电机额定扭矩 瞬时最大扭矩 < 伺服电机最大扭矩 (加速时) 负载惯量 < 10倍电机转子惯量 连续工作速度 < 电机额定转速
数控机床主传动系统设计毕业设计(工作计划
数控机床主传动系统设计毕业设计(工作计划数控机床主传动系统设计毕业设计(工作计划,工作总结,文献综述)工作计划毕业设计是在学生完成全部理论教学和时间教学后所进行的一次综合训练,是整个教学过程中最后一个主要的实践教学环节,目的是使学生综合运用所学的基础理论,专业知识和基本技能,进行工程设计和科学研究等工程师的基本训练,进一步培养学生的科学态度,独立分析和解决问题的能力以及创新的精神。
因此,我为这次毕业设计制定了一个详细周密的工作计划。
本次毕业设计完成需12_15周。
预期结果为主轴箱展开图、横剖面图、转速图和功率扭矩图、传动系统图、拆主轴零件图及主轴的加工编程等。
结果表现形式为全部设计图纸及设计说明书。
1基本要求(1)中英文文献及文献综述各一份(2)阅读有关材料15篇(3)外文资料翻译3000字以上(4)设计说明书10000字以上(5)折成A0号图纸4张2设计任务(1)运动设计(2)动力设计(3)结构设计(4)主轴数控加工编程(5)拆主轴零件图(6)传动系统图(7)主轴箱展开图(8)横剖面图(9)转速图和功率扭矩图3工作计划(1)第1_2周实习调研、检阅资料(2)第3_4周方案确定、开题报告(3)第5_8周设计数控机床主传动系统总体方案(4)第9_13周外文翻译(5)第14周撰写说明书(论文)(6)第15周上交设计(论文)工作总结本文完成了数控机床主传动系统设计。
主传动系统是实现主运动的传动系统,它的转速高、传递的功率大,是数控机床的关键部件之一。
对它的精度、刚度、噪声、温升、热变形都有严格的要求。
由于数控机床的主运动要求有较大的调速范围,因此数控机床的主传动电机主要使用交流变频调速伺服调速电机。
由于主运动采用了无级变速,为了确保低速时的扭矩,数控机床在交流和直流电机无级变速的基础上配以齿轮变速。
数控机床采用带有变速齿轮的主传动。
通过少数几对齿轮减速,扩大了输出扭矩,以满足主轴输出扭矩特性的要求,以获得强力切屑时所需要的扭矩。
高精密伺服转台控制系统的设计

ISSN 100020054CN 1122223 N 清华大学学报(自然科学版)J T singhua U niv (Sci &Tech ),2004年第44卷第8期2004,V o l .44,N o .813 37105421056高精密伺服转台控制系统的设计黄令龙, 郭阳宽, 蒋培军, 李 晟, 李庆祥, 陈张玮(清华大学精密仪器与机械学系,北京100084)收稿日期:2003210227作者简介:黄令龙(19782),男(汉),四川,硕士研究生。
通讯联系人:李庆祥,教授,博士生导师,E 2m ail :liqx @p i m .tsinghua .edu .cn摘 要:该文设计并研制了高精密伺服转台的控制系统。
该控制系统采用圆光栅作为转台位移检测工具,采用了数字位置环和模拟电流环共同组成双闭环随动系统,其中位置控制器是带有速度前馈和加速度前馈的数字P I D 伺服滤波器。
实验结果表明,该转台运行1.148h 过程中位置伺服精度在±1″范围内,控制系统速度阶跃响应时间小于50m s ;运动稳定,速度变化范围小于±10%,满足高精密伺服转台位置伺服的精度要求。
关键词:导航系统;高精密伺服转台;前馈控制;圆光栅中图分类号:V 249.32文献标识码:A文章编号:100020054(2004)0821054203Con trol system for h igh -prec isionturn tableH UANG L ing long ,GUO Ya ngkua n ,J I A NG Pe ijun ,L I S he ng ,L IQ ingxia ng ,CHEN Zha ngw e i(D epart men t of Prec ision I n stru men ts and M echanology ,Tsi nghua Un iversity ,Be ij i ng 100084,Chi na )Abstract :H igh 2p recisi on servo turn tables are w idely used in inertial navigati on system s,w here their p recisi on m ainly depends on the contro l system.T h is paper describes a contro l system developed fo r a set of h igh 2p recisi on servo turn tables .T he system has a double clo sed 2loop contro l system w ith a digital po siti oning loop and an analog current loop.A circular grating is used fo r accuratepo siti oning .T he digital singnal p rocesso r (D SP )based po siti oncontro ller com bines a P I D servo w ith velocity feedfo r w ard and accelerati on feedfo r w ard contro l to i m p rove perfo rm ance .T estresults show ed that the po siti oning p recisi on w as w ithin ±1″during stable operati on of 1.148h .T he step response interval is less than 50m s and mo ti on fluctuati ons are less than ±10%,so the system p rovides accurate po siti oning servo contro l .Key words :navigati on system;h igh 2p recisi on servo turn table;feedfo r w ard contro l;circular grating惯性导航系统在现代化技术中,尤其是在国防技术中,占有非常重要的地位。
毕业设计:电动伺服控制器

XXXXXXX学院毕业设计说明书数字电动伺服控制器的设计Digital electric servo controller design学生学号:学生姓名:专业班级:指导教师:职称:起止日期:xxxxxxxxxxx 学院数字电动伺服控制器的设计摘要本设计课题来源于吉林大学工程机器人研究室,主旨是采用C8051F410单片机控制器实现对伺服电机系统的控制。
根据控制器的要求,提出总体方案。
控制器包括C8051F410单片机最小系统、AD620模拟量输出转换、RS-485接口、开关量输出信号处理、开关量输入信号处理、光电码盘四倍频鉴相及供电电路。
控制器采用C8051F410单片机最小系统作为主控单元,AD620模拟量输出转换电路将C8051F410单片机输出的电流转换成-10V~+10V的电压信号来控制伺服电机速度,RS-485接口电路是控制器与上位机进行双向数据通讯,开关量输出信号处理电路将来自C8051F410单片机最小系统I/O口输出的高低电平转换成光敏晶体管的导通或截止来控制伺服系统,开关量输入信号处理电路是将采集到的信号转换成C8051F410单片机最小系统I/O可以认知的信号,光电码盘四倍频鉴相电路将采集到的光电码盘信号进行转换进而送给C8051F410单片机最小系统I/O,供电电路为整个控制器供电。
控制器系统利用C语言编写了C8051F410单片机程序和PID控制算法,从而使控制器具有无超调,实时性和响应性好,定位精确,可靠性高,尺寸小,质量轻,成本低等特点。
关键词:伺服控制器;PID控制;C8051F410单片机:RS-485通讯AbstractThe design issues from Jilin University Engineering Robotics Laboratory, the subject realizes control servomotor control system from using C8051F410 MCU controller. According to the requirements ,controller puts forward the overall program. The controller includes a minimum system C8051F410 micro controller, AD620 analog output converter, RS-485 interface, the switch output signal processing, digital input signal processing, fourth harmonic phase optical encoder and power supply circuit.C8051F410 MCU controller uses minimum system as the main control unit, By AD620 Analog output converter circuit , micro controller C8051F410 output current is converted to-10V ~ +10 V voltage signal to control the servo motor speed, RS485 interface circuit is the controller and PC bi-directional data communication, signal processing circuit switch output from minimum system C8051F410 MCU I / O port into high and low output phototransistor is turned on or off to control the servo system, Switch input signal processing circuit is the collected signals into C8051F410 micro controller minimum system I / O signals can be cognitive, Optical encoder four octave phase circuit will be collected Optical encoder signal is converted and then sent C8051F410 SCM minimum system I / O, power supply circuit for the entire controller.The controller system uses C language 8051F410 MCU programs and PID control algorithm, so that the controller has no overshoot, timeliness and responsiveness is good, accurate positioning, high reliability, small size, light weight, and low cost.Key Words:servo controller; proportional integral differential(PID)control;C8051F410Single-chip microcomputer;RS-485Communications数字电动伺服控制器的设计目录摘要 (II)Abstract ............................................................................................................................................. I II 第1章绪论 (1)1.1课题在国内外的现状 (1)1.2课题的目的和意义 (2)1.3伺服系统的介绍 (2)1.3.1伺服系统的基本要求 (2)1.3.2伺服系统的主要特点 (2)1.3.3伺服系统的分类 (3)第2章整体方案设计 (5)2.1课题的要求 (5)2.2课题设计的主要内容 (5)2.3整体方案设计框图 (5)第3章硬件设计 (7)3.1总述 (7)3.2 C8051F410单片机最小系统 (7)3.2.1C8051F410单片机 (7)3.2.2 C8051F410单片机最小系统电路图 (8)3.3 RS-485通讯接口 (9)3.3.1 MAX485的介绍 (9)3.3.2 RS-485通讯接口电路 (10)3.4 AD620模拟量输出 (11)3.4.1 AD620的介绍 (11)3.4.2 AD620模拟量输出电路 (12)3.5开关量输入信号处理 (13)3.5.1开关量输入接口 (13)3.5.2光电隔离的器件光电耦合器简介 (14)3.5.3开关量输入信号处理电路 (15)3.6开关量输出信号处理 (16)3.6.1开关量输出接口 (16)3.6.2开关量输出信号处理电路 (16)3.7光电码盘鉴相电路 (16)3.7.1光电码盘的简介 (16)3.7.2光电码盘鉴相电路的设计原理及其电路图 (18)3.8供电电路的设计 (20)3.8.1三端稳压集成电路的介绍 (20)3.8.2供电电路 (21)第四章软件设计 (23)4.1软件设计要求 (23)4.2主程序实现框图 (23)4.2.1增量式PID控制算法 (23)第五章开发环境 (27)5.1 KEIL软件 (27)5.1.1 KEIL软件简介 (27)5.1.2 KEIL软件使用步骤 (27)5.2 Altium Designer Summer 09软件 (33)总结 (35)致谢 (36)参考文献 (37)附录 (38)1附录表 (38)第1章绪论1.1课题在国内外的现状伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。
三轴伺服移动平台控制系统的设计
金华职业技术学院J I N H U A P O L Y T E C H N I C毕业教学环节成果(2014届)题目三轴伺服移动平台控制系统的设计学院信息工程学院专业电气自动化班级自动化111学号201131010350102姓名指导教师2014年5月30日金华职业技术学院毕业教学成果目录摘要 (3)英文摘要 (3)引言 (4)1 三轴伺服移动平台控制系统简介 (5)2 控制系统结构及工作原理................................. 错误!未定义书签。
3 主要器件选型 (6)3.1 可编程控制器的选型 (7)3.2 触摸屏的选型 (7)4 I/O口分配表 ........................................... 错误!未定义书签。
5 控制系统电路设计 (8)5.1 PLC外围接线图 (8)5.2 伺服电机控制电路图 ............................... 错误!未定义书签。
5.3 横移电机控制电路图 ............................... 错误!未定义书签。
6传感器................................................. 错误!未定义书签。
6.1 左右移动位置传感器 ............................... 错误!未定义书签。
6.2上下移动位置传感器................................ 错误!未定义书签。
6.3 车位检查传感器 ................................... 错误!未定义书签。
7安装................................................... 错误!未定义书签。
7.1控制系统接线图 (9)7.2 控制柜电气元件布局图 ............................. 错误!未定义书签。
伺服转台的传动系统设计_毕业设计1 精品
毕业设计伺服转台的传动系统设计摘要毕业设计是对大学专业知识的巩固、提高和综合运用,是对学生的理论与实际相结合能力的考验。
通过毕业设计这一过程,完成简单机械系统装置的设计,树立正确的设计思想和工程意识,培养独立分析、解决实际设计问题的能力,为今后的学习和工作打下良好的基础。
本文完成了对一个伺服转台的传动系统设计。
与已有的伺服系统相比,此系统它具有结构紧凑、外廓尺寸小和重量轻等优点。
论文首先简要介绍了课题的背景,以及伺服系统的应用,然后根据方案确定传动结构种类,从而确定了传动的基本类型。
论文主体部分包括驱动装置(包含电动机)、锥齿轮传动、少齿差行星减速器。
通过对驱动装置包含电动机选取,然后分配锥齿轮传动、行星减速器、的传动比,确定锥齿轮和行星减速器的大致结构之后,对其进行了整体结构的设计计算和校核。
论文最后对设计过程进行了总结。
因本人的知识水平有限,实际工作经验不足,之中的错误与不妥之处在所难免,恳请读者批评指正关键词:伺服传动系统;少齿差行星减速器;锥齿轮传动ABSTRACTThe graduation design is an approach for students to consolidate, improve and apply the professional knowledge they have learned in university and it is also a test of the students’ability of combining theories with practices. Through the process of designing a simple mechanics working procedure, I have gained the idea of designing, the ability of analyzing and solving problems. Therefore it helps me lay a solid foundation for the further study and workThis paper completed the transmission system design of a servo turntable. Compared with the existing servo system at home and abroad. This system has compact structure. Outline the advantages of small size and light weight.Paper first briefly introduces the background of the topic. and the application of servo system. Then according to the schemes to determine the transmission structure types. To identify the basic types of transmission. Paper main body part including drive device(Consists of motor). Bevel gear drive. Planetary gear reducer. Through the drive unit consists of motor. Bevel gear drive. Planetary gear reducer. Distribution of transmission ratio. After the general structure of the spiral bevel gear and planetary gear reducer is determined. On the whole structure design and calculation and checking. Finally, the paper design process are summarized.There is a limit to a person’s knowledge and working experience. So I sincerely hope that the readers can give me more advice if there is any mistake leaded by my carelessnessKey words: Servo drive system; Less tooth differenced planetary reducer; Bevel gear drive目录摘要 (i)ABSTRACT............................................................................................................. i i 目录 ..................................................................................................................... i ii 1绪论 . (1)2概述 (2)3传动系统的总体设计 (2)3.1伺服电机的选取 (2)3.2传动方案的选取 (3)3.3输出机构选择 (4)4传动系统设计 (4)4.1传动锥齿轮的设计 (4)4.2行星减速装置的设计 (7)4.2.1齿轮齿数确定 (7)4.2.2模数确定 (7)4.2.3齿轮几何尺寸的确定 (10)4.2.4偏心轴的设计 (16)4.2.5输出轴的设计 (17)4.2.6销轴及销轴套的选择 (18)4.3顶圆柱齿轮设计 (18)5主要零件的校核 (20)5.1偏心轴的校核 (21)5.2销轴的弯曲强度校核 (22)5.3输出轴的校核 (24)5.4键的校核 (25)结束语 (26)参考文献 (27)1绪论伺服控制技术是自动化学科中与产业部门联系最紧密、服务最广泛的一个分支。
NC07 伺服传动系统设计

7.1.1 初选丝杠直径
(3) 验算键的挤压应力 设键的尺寸为:宽高长= b h l (mmmm mm),则挤压应 力 p (MPa) 验算公式如下:
p
2000 T [ p] dk (l b / 2)
式中:T—扭矩(Nm);d—轴径(mm);k = h/2(mm); [p]—许用挤 压强度(MPa)。
第7讲 伺服进给传动系统设计
7.1 滚珠丝杠
7.1.6 寿命计算
(1) 名义寿命
Fa 0
Fa 0
Fa0螺母预紧负荷
第7讲 伺服进给传动系统设计
7.1 滚珠丝杠
7.1.6 寿命计算
(2) 寿命时间
L Lh 60 N m
Nm——丝杠平均转速 (r/min) (计算方法见7.1.7小节)
第7讲 伺服进给传动系统设计
K K R 1
式中,K—应力集中系数,KR— 表面粗糙度系数,—绝对尺寸影 响系数,—表面状态系数。各系 数可从机械设计手册上查到。
第7讲 伺服进给传动系统设计
7.1 滚珠丝杠
7.1.2 轴强度的精确校核
(2) 静强度安全系数校核
Ss
Z p s 3Tmax
[S s ]
数控技术与机床 下篇
数 控 技 术
李为民 教授 河北工业大学机械工程学院 并联机器人研究中心
第7讲 伺服进给传动系统设计
内容提要: 本讲为伺服进给传动系统的应用总结
先介绍伺服进给传动系统的组成,然后讲述伺服
进给传动系统设计过程,包括丝杠、导轨及伺服电机
选择、计算。
第7讲 伺服进给传动系统设计
主轴 导轨滑块 导轨
(1) 名义寿命
二维交流伺服数控控制工作台机械系统设计
图书分类号:密级:毕业设计(论文)二维交流伺服数控控制工作台机械系统设计THE MECHANICAL SYSTEM DESIGN OF TWO-DIMENSIONAL EXCHANGE SERVO NUMERICAL CONTROL CONTROL WORK TABLE学生姓名学院名称机电工程学院专业名称机械设计制造及其自动化指导教师毛瑞卿2008年6月2日徐州工程学院学位论文原创性声明本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果。
除文中已经注明引用或参考的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品或成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标注。
本人完全意识到本声明的法律结果由本人承担。
论文作者签名:日期: 2008 年 6月1日徐州工程学院学位论文版权协议书本人完全了解徐州工程学院关于收集、保存、使用学位论文的规定,即:本校学生在学习期间所完成的学位论文的知识产权归徐州工程学院所拥有。
徐州工程学院有权保留并向国家有关部门或机构送交学位论文的纸本复印件和电子文档拷贝,允许论文被查阅和借阅。
徐州工程学院可以公布学位论文的全部或部分内容,可以将本学位论文的全部或部分内容提交至各类数据库进行发布和检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
论文作者签名:导师签名:日期:年月日日期:年月日摘要随着现代信息技术的发展,以提高产品加工的生产效率为主的高度自动化和以提高ch产品的质量为主的精密化成为现代机械加工技术发展的两个主要方向。
人们对航空机、数控机床、精密仪器和仪表以及各种精密机械设备提出了越来越高的精度要求,X-Y作台是这些设备实现高精密加工的核心部件,对于提高产品的加工质量起着尤为重要作用。
对,涉及到伺服电机的选型,滚珠丝杠副的选型、强度校核及其生产设计中应注意的问题,连接伺服电机和滚珠丝杠副的联轴器的选型与校核,支承件轴承的设计,导轨及机架的设计。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。