非线性系统近似为线性系统
线性系统和非线性系统

线性系统和⾮线性系统⼀、线性和⾮线性的区别?线形指量与量之间按⽐例、成直线的关系,在空间和时间上代表规则和光滑的运动;飞线性则指不按⽐例、不成直线的关系代表不规则的运动和突变。
⼆、如何判断⼀个系统是线形还是⾮线性系统?如果从系统状态空间表达式来观察,线性系统和⾮线性系统最明显的区别⽅式就是线性系统符合叠加原理,⽽⾮线性系统不然。
换句话说线性系统只有状态变量的⼀次项。
⾼次、三⾓函数以及常数项都没有,只要有任意⼀个⾮线性环节就是⾮线性系统。
三、⾮线性系统有⼀种⽅式是局部转化成线性系统才能控制?⾮线性系统不是不能控制⽽是不能掌控设想⼀下汽车的油门是⾮线性控制,如果踩⼀⼩点速度猛然上升,这种现象在现实中不希望看到,现实中需要缓慢的线性变化,⽽不是突变的⾮线性变化。
线形系统具有规律可循,只要找到系统的⼀部分就可以推算出其他部分,⾮线性系统⽆规律可循,于是将⾮线性系统近似为线性系统也是飞线性系统的⼀种计算⽅式。
四、⾮线性系统和线性系统相⽐具有什么特点?(1)线性系统的稳定性和输出特性,只取决于本⾝的结构和参数。
⽽⾮线性系统的稳定性和输出动态过程。
不仅与本⾝的结构和参数有关,⽽且还与系统的初始条件和输⼊信号⼤⼩有关。
(2)⾮线性系统的平衡运动状态,除平衡点外还可能有周期解。
周期解有稳定和不稳定两类,前者观察不到,后者是实际可观察到的。
因此在某些⾮线性系统中,即使没有外部输⼊作⽤也会产⽣有⼀定振幅和频率的振荡,称为⾃激振荡,相应的相轨线为极限环。
改变系统的参数可以改变⾃激振荡的振幅和频率。
这种特性可⽤于实际⼯程问题,以达到某种技术⽬的。
例如根据温度来影响⾃激振荡,可以构成双位式温度调节器。
(3)线性系统的输⼊为正弦函数时,其输出的稳态过程也是同频率的正弦函数,两者仅在相位和幅值上不同。
但⾮线性系统的输⼊为正弦函数时,其输出则包含有⾼次谐波的⾮正弦周期函数,即输出会产⽣倍频、分频、频率。
电力系统中的非线性控制技术研究

电力系统中的非线性控制技术研究摘要随着电力系统的不断发展和复杂性的增加,传统的线性控制技术已经不能满足电力系统的实时控制需求。
因此,非线性控制技术作为一种新的控制方法,越来越受到人们的关注。
本文通过对电力系统中非线性控制技术的研究,阐述了非线性控制技术的基本理论、应用及其在电力系统中的研究进展和应用现状,分析了非线性控制技术在电力系统中的优点和不足之处,并提出了一些应对措施和改进建议,为电力系统的实时控制提供参考。
关键词:电力系统;非线性控制技术;实时控制;研究进展;应用现状AbstractWith the continuous development and increasing complexity of power systems, traditional linear control technologies are no longer able to meet the real-time control requirements of power systems. Therefore, nonlinear control technology, as a new control method, has attracted more and more attention. In this paper, through the study of nonlinear control technology in power systems, the basic theory, application, research progress and application status of nonlinear control technology in power systems are expounded. The advantages and disadvantages of nonlinear control technology in power systems are analyzed, and some countermeasures and improvement suggestions are proposed to provide reference for real-time control of power systems.Keywords: power system; nonlinear control technology; real-time control; research progress; application status第一章绪论1.1 研究背景与意义随着电力系统的不断发展和复杂性的增加,电力系统的实时控制需求越来越高。
非线性系统分析方法
非线性系统分析方法8-1 概述一、教学目的和要求了解研究非线性系统的意义、方法,常见非线性特性种类。
二、重点内容非线性概念,常见非线性特性。
三、教学内容:1 非线性系统概述非线性系统运动的规律,其形式多样,线性系统只是一种近似描述。
(1)非线性系统特征—不满足迭加原理1)稳定性:平衡点可能不只一个,系统的稳定性与系统结构参数、初始条件及输入有关。
2)自由运动形式,与初条件,输入大小有关。
3)自振,自振是非线性系统特有的运动形式,它是在一定条件下,受初始扰动表现出的频率,振幅稳定的周期运动。
(2)非线性系统研究方法1)小扰动线性化处理(第二章介绍)2)相平面法-----分析二阶非线性系统运动形式3)描述函数法-----分析非线性系统的稳定性研究及自振。
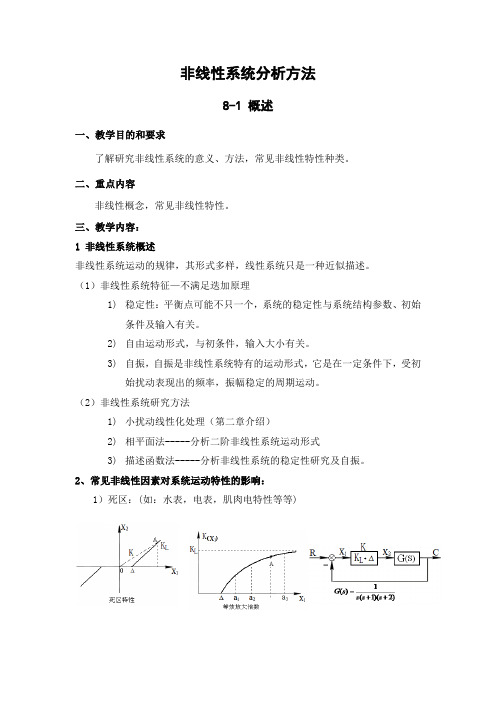
2、常见非线性因素对系统运动特性的影响:1)死区:(如:水表,电表,肌肉电特性等等)饱和对系统运动特性的影响:进入饱和后等效K ↓⎪⎩⎪⎨⎧↓↑↓↓,快速性差限制跟踪速度,跟踪误统最多是等幅振荡)(原来不稳,非线性系振荡性统一定稳定)原来系统稳定,此时系(%σ死区对系统运动特性的影响:⎪⎩⎪⎨⎧↓↓↑↓动不大时)]此时可能稳定(初始扰[原来不稳定的系统,,振荡性声,提高抗干扰能力差),能滤去小幅值噪跟踪阶跃信号有稳态误等效%(e K ssσ 可见:非线性系统稳定性与自由响应和初始扰动的大小有关。
2) 饱和(如运算放大器,学习效率等等)3) 间隙:(如齿轮,磁性体的磁带特性等)间隙对系统影响:1) 间隙宽度有死区的特点----使ss e ↓2) 相当于一个延迟τ时间的延迟环节,%σ→↑ 振荡性减小间隙的因素的方法:(1)提高齿轮精度 ; (2)采用双片齿轮; (3)用校正装置补偿。
5) 摩擦(如手指擦纸) 摩擦引起慢爬现象的机理改善慢变化过程平稳性的方法1)2)3)⎧⎪⎨⎪⎩、良好润滑、采用干扰补偿、增加阻尼,减少脉冲,提高平衡性摩擦对系统运动的影响:影响系统慢速运动的平稳性6)继电特性:对系统运动的影响:1)K (2K %3)ss e σ⎧⎧⎪⎨⎩⎪⎪⎧↑⎪⎪⎪⎧↓⎨⎨⎪⎨⎪⎪↓⎪⎩⎩⎪⎪⎪⎪⎩一、二阶系统可以稳定、理想继电特性 等效: 一般地,很多情况下非线性系统会自振带死区))、带死区继电特性 等效: 快态影响(死区+饷)的综合效果振荡性、一般继电特性:除3、2中听情况外,多出一个延迟效果(对稳定性不利)8-2 相平面法一、教学目的和要求:掌握相平面概念及分析方法。
非线性控制系统的近似化方法(论文资料)
=
a0 2
+
[ an cos ( nωt)
n=1
+ bn sin ( nωt) ] ,
(4)
式中傅里叶系统 ai , bi 通常为 A ,ω的函数. 如果非线性环节
为奇函数 ,则 a0 = 0 , 近似地只考虑输出的基波 ,有
w ( t) ≈ a1 cos(ωt) + b1 sin (ωt) = M sin (ωt + <) , (5)
由上述方程可以解出系数 ,积分可得变换 Ti ( x) , 在该变换
下系统的切模型是独立的. 假定系统轨线保持在该切模型附
近 ,则基于该模型的控制设计大大简化了系统设计问题 . 该
方法忽略了二阶项 ,但可以证明如果系统轨线保持在平衡点
附近 ,则不影响系统的闭环稳定性 . 文献 [ 6 ]等将伪线性化方
(2)
其中
A
=
5f ( x , u) 5x
(0 ,0)
,
B
=
5f ( x , u) 5u
,
(0 ,0)
而 f h ( x , u) 表示包含 x 和 u 的高阶项 ,略去高阶项 ,即得系统
在 (0 ,0) 处的线性近似系统.
3 基金项目 :国家 863 计划智能机器人主题资助项目(9805 - 19) ,国家自然科学基金 (69974015) 资助项目 ,广东省自然科学基金 (960235 及 990583) 资助项目及广东省教育厅资助课题.
5f 5x
δx
( x0 , u0 )
+
5 Ti ( x) 5x
5f 5u
δu. (11)
( x0 , u0 )
令
5 Ti ( x) 5x
第六章非线性系统的反馈线性化
第六章非线性系统的反馈线性化反馈线性化方法的基本思想是用反馈的方法,将非线性被控对象补偿成为一个具有线性特性的系统,然后利用线性系统理论进行控制系统设计。
基于微分几何的反馈线性化方法是一种精确线性化方法。
6.1 反馈线性化基本概念反馈线性化设计步骤是:(1)通过反馈的方法将非线性系统转化为线性系统,这个过程可以微分几何方法;(2)经过线性化处理后的系统进行设计。
与泰勒级数展开的近视线性化方法不同,它是建立在系统状态变换与非线性反馈基础上的一种精确方法。
它是大范围有效的,而不是仅仅局限于工作点附近。
1水槽的系统模型为()()2h d A h dhu t a ⎡⎤=−∫4()f B =+ xx u 考虑如下系统x是系统状态,f(x)是光滑向量场,u是控制输入,B是输入矩阵且可逆。
设跟踪轨迹为x d 。
=d e x x−定义跟踪误差=f()B d ex x u −− 主要思路是设计如下的补偿控制算法1=(f())d u Bxx ke −−+ =-eke 补偿后的误差动态方程为稳定例2 两关节机械手111212121112122212220H H qhq hqhq q g H H qhq qg ττ−−−⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤++=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦&&&&&&&&&&(6.1)5其中,[]12,Tq q =q 为关节角,[]12,Tττ=τ为关节输入。
12222221222221111211222222221212122221211122122122122cos cos sin cos cos()cos cos()c c c c c c c c c c H m l I m l l l l q I H m l I H H m l l q m l I h m l l q g m l g q m g l q q l q g m l g q q ⎡⎤=+++++⎣⎦=+==++=⎡⎤=+++⎣⎦=+表示成向量形式()(,)()H q qC q q q g q τ++=&&&&两边同乘以1H −,可变成仿射非线性系统(6.1)。
非线性系统概述
2.非线性系统的数学模型
一般非线性系统数学模型可用下式描述:
F
d
n x(t dt n
)
,
d
n1x(t) dt n1
,.....
.,dx(t dt
)
,
x(t
),
d
mu(t dt m
)
,..
....
,u(t
)
0
或写成多变量的形式:
•
X (t) f (X (t),U (t),t)
3.非线性系统的研究方法
3.描述函数法:是一种等效线性化方法。在一定的条件下, 用非线性元件的输出的基波分量作为在正弦信号输入时系 统的非正弦输出,从而应用奈奎斯特稳定性判据分析系统 的稳定性和自持振荡问题。但该近似方法的应用是有一定 条件的,否则所得结果没有价值。
4.相平面法:是一种图解法,仅适用于一阶或二阶系统。 通过在X— 平面上绘制非线性系统的运动轨迹,可分析系 统的稳定性和一些动态性能。对于任意的二阶以下的非线 性系统均适用。
4.在线性系统中,串联环节的互换对系统输出响应并没有 影响,而在非线性系统中,这可能会导致一个稳定的系统 变为不稳定,或使系统的输出发生根本性的变化,
5.非线性系统常会产生持续振荡,即所谓自持振荡;而线 性系统运动状态有两种:收敛和发散。
6. 非线性系统的运动方式比线性系统要复杂得多。从数学 角度来看,其解的存在性和唯一性都值得研究。从控制的 角度来看,目前的研究方法虽很多,但没有系统性的和普 遍性的解决方案。
5.计算机仿真:是研究复杂非线性系统的一种非常有效的 方法,但它只能给出特解,无法得到解析解,因此缺乏对 一般非线性系统的指导意义。
本章仅介绍小范围线性近似法、相平面法 和描述函数法。
中国地质大学22春“电气工程及其自动化”《现代控制理论》期末考试高频考点版(带答案)试卷号:2
中国地质大学22春“电气工程及其自动化”《现代控制理论》期末考试高频考点版(带答案)一.综合考核(共50题)1.下面关于非线性系统近似线性化的说法正确的是()。
A.近似线性化是基于平衡点的线性化B.系统只有一个平衡点时,才可以近似线性化C.只有不含本质非线性环节的系统才可以近似线性化D.线性化后系统响应误差取决于远离工作点的程度:越远,误差越大参考答案:ACD2.下面关于线性时不变连续系统Lyapunov方程说法正确的是()。
A.A渐近稳定,Q正定,P一定正定B.A渐近稳定,Q半正定,P一定正定C.Q半正定,P正定,不能保证A渐近稳定D.A渐近稳定,Q半正定,且xTQx沿方程的非零解不恒为0,P一定正定参考答案:ACD3.若一个系统的某个平衡点是李雅普诺夫意义下稳定的,则该系统在任意平衡状态处都是稳定的。
() T.对F.错参考答案:F4.保证稳定是控制系统正常工作的必要前提,对受控系统通过反馈使其极点均具有负实部,保证系统渐近稳定称为()。
A.能控性B.能观性C.系统镇定D.稳定性参考答案:C5.系统渐近稳定的充分必要条件是()。
A.零输入响应在t→∞时趋于零,对应于系统的每个特征值均有负实部B.零输入响应在t→∞时趋于零,对应于系统的每个特征值均有正实部C.零输入响应在t→0时趋于零,对应于系统的每个特征值均有负实部D.零输入响应在t→0时趋于零,对应于系统的每个特征值均有正实部参考答案:A6.状态方程表达了输入引起状态变化的运动,输出方程则表达了状态引起输出变化的变换过程。
() T.对F.错参考答案:T7.经典控制理论用于解决反馈控制系统中控制器的分析与设计的问题,它一般适用于()。
A.单输入单输出线性定常系统B.多输入多输出线性定常系统C.时变系统D.非线性系统参考答案:A8.下面关于状态矢量的非奇异线性变换说法正确的是()。
A.对状态矢量的线性变换实质是换基B.非奇异线性变换后的系统特征值不变C.非奇异线性变换后的系统运动模态不变D.同一线性时不变系统的两个状态空间描述不可以非奇异线性变换互相转换参考答案:ABC9.系统输入对状态空间中任意初始状态控制到平衡态的能力称为()。
研究生课程“线性系统理论”的深入解析

作者简介:魏萍(1975—),讲师,研究方向为控制理论及应用。 65
Copyright©博看网 . All Rights Reserved.
教改教法
(2)从非线性系统得到相应稳态点附近的线性系统,数 学表达式中可以看到状态变量发生了变化,线性系统中的 状态变量与输入变量实际上是原非线性系统中状态变量的 增量。一般来说,如果从实际系统经过机理分析建立的数学 模型是非线性模型,那么相应的状态变量有实际的物理意 义,所以此时需要注意,线性系统中的变量是相应增量,在 具体问题分析与设计中,明确这一点至关重要。
(3)对于非线性系统来说,稳态点(x0, u0)可能是不唯一 的,故针对不同的稳态点就对应不同的局部近似线性系统, 不同线性系统就会有不同的运动特征,进而设计不同的控 制系统。另外,从前面两点已经明确,当系统状态(真实状 态)在某稳态点邻域内时,也就是稍微偏离稳定态时,线性 系统的分析综合结果用于非线性系统。而当稳态点不唯一 时,更要注意状态局部偏离的意义,否则一不小心跳到其他 吸引域或发散域,控制效果会出人意料。
文章编号:1672-7894(2015)36-0065-02
摘 要 “线性系统理论”是自动化专业研究生的一门专业 课程,知识体系相对完备,是学习其他后续课程的理论基 础。本文旨在针对平时作业和考试中考查不到、学生平时学 习不关注的部分内容进行深入理论解析,内容包含:线性系 统与非线性系统、时变系统与时不变系统、内部稳定与外部 稳定,以期提升学生对线性系统理论的全面深入理解,进而 培养学习中的“研究”能力。 关键词 线性系统理论 研究生课程 理论解析
主要着重于习题研究,或部分理论用于实验指导。所以在研 究生课程学习中,仍习惯沿袭以往的方式,过于注重实用, 如具体计算和直接套用,而忽略一些深层次理解,不能体现 “研究”能力的培养。本文旨在结合“线性系统理论”时间域 理论教学体会,从学生所忽略的方面深入展开,以期达到培 养学生“研究”习惯的形成。
131209第8章非线性控制系统分析

非线性系统的数学模型是非线性微分方程;但至今为止 非线性微分方程没有成熟的解法;
8.2 几种典型的非线性特性
饱和特性 死区特性 间隙特性 继电器特性 变增益特性
(1)饱和特性(如运算放大器,学习效率等)
1. 对系统而言,饱和特性往往促使系统稳 定,但会减小放大系数,从而导致稳定 精度降低。 2. 饱和特性的例子是放大器,许多执行元 件也具有饱和特性。例如伺服电机。 3. 实际上,执行元件一般兼有死区和饱和 特性。
y1 ( t )
4M
sin t
理想继电特性的描述函数:
4M N ( A) 0 A
一般继电特性的描述函数:
2M mh 2 h 2 2M h N ( A) 1 ( ) 1 ( ) j ( m 1) 2 A A A A ( A h)
可能不稳定—发散、衰减等
3. 自振运动— 非线性系统特有的运动形式,产生自持振荡 4. 发生频率畸变—频率响应的复杂性 — 跳频响应,倍/分频 响应,组合振荡
非线性控制系统的分析方法
小扰动线性化
非线性系统研究方法 仿真方法
全数字仿真 半实物仿真 相平面法 描述函数法 波波夫法 反馈线性化法 微分几何方法
h 0 理想继电特性: m 1 死区继电特性: m 1 纯滞环继电特性:
4M N ( A) A
4M h N ( A) 1 A A
2
2
4M 4 Mh h N ( A) 1 j A A2 A
一般而言,描述函数 N(A)是A的函数,与频率无关 非线性环节为单/非单值函数时,N(A)是实/复数,虚部为/不为0
在小误差信号时具有较小的增益,从而提高系统的相对稳定性。 同时抑制高频低振幅噪声,提高系统响应控制信号的准确度。
简称为线性定常系统
入电压是随时间变化的
uc (t ),其输出是随时间变
化的电压 ur (t ) ,则可建立输入和输出之间的 微分方程: u (t ) RC du c (t ) u (t )
r
dt
Hale Waihona Puke c线性系统动态特性-举例
举例2:RLC电路,如果 输入电压是随时间变化 的 uc (t ) ,其输出是随 时间变化的电压 ur (t ) ,则可建立输入和输出之间 的微分方程:
动态特性(续)
●我们仅讨论线性、时不变,简称为线性定常系统,
就是可以用常微分方程描述的系统。 因为:对线性定常系统进行分析的理论和方法最 为基础、最成熟,同时其它系统通过某种假设后可近 似作为线性定常系统来处理。 近似性:非线性系统近似为线性系统;高阶系统近 似为低阶系统;时变系统近似为常系数系统;非平稳随 机过程近似为平稳随机过程等.
3.1测试系统的描述
● ●
1、静态特性
2、动态特性
动态特性
●系统模型的划分 线性系统与非线性系统 线性系统:具有叠加性、均匀性的系统 连续时间系统与离散时间系统 连续时间系统:输入、输出均为连续函数.描述系 统特征的为微分方程. 离散时间系统:输入、输出均为离散函数.描述系 统特征的为差分方程. 时变系统与时不变系统: 由系统参数是否随时间而变化决定.
引起的输出为
y(t ) y0e
j (0t )
频率保持特性的含义
●线性系统具有频率保持特性的含义是输入信号的频
率成分通过线性系统后仍保持原有的频率成分。如 果发现输入和输出信号的频率成分不同,则该系统 就不是线性系统。
非线性系统 特性
输出信号
如余弦信号通过非线性 系统(二极管),则输 出被整流,其频率成分 被改变。
线性系统与非线性系统

线性系统与非线性系统线性系统和非线性系统是控制理论中重要的概念,它们对于描述和分析物理系统的行为具有重要意义。
本文将探讨线性系统和非线性系统的定义、特点以及在实际应用中的区别和应用。
一、线性系统线性系统是指具有线性特性的系统,其中输入和输出之间存在线性关系。
线性系统的特点是具有叠加原理和尺度不变性。
叠加原理指的是当输入信号为x1(t)和x2(t)时,对应的输出分别为y1(t)和y2(t),则输入为x1(t)+x2(t)时,对应的输出为y1(t)+y2(t)。
即系统对输入信号的响应是可加性的。
尺度不变性指的是当输入信号为kx(t)时,对应的输出为ky(t),其中k为常数。
即系统对于输入信号的放大或缩小,输出信号也相应地放大或缩小,但形状保持不变。
线性系统的数学模型可以用线性常微分方程表示,常见的线性系统包括线性电路、线性网络等。
线性系统的分析和控制较为简单,可以使用线性代数和转移函数的方法进行建模和求解。
二、非线性系统非线性系统是指输入和输出之间不存在线性关系的系统,其特点是叠加原理和尺度不变性不成立。
非线性系统具有复杂的动态特性,可能存在混沌现象、周期解、稳定解等。
非线性系统的行为难以预测和描述,经常需要借助数值方法和仿真模拟进行研究。
非线性系统广泛应用于生物、经济、环境等领域,例如生物系统的行为建模、经济市场的预测分析、气候模拟等。
非线性系统的研究和控制涉及到多个交叉学科,是当前的热点和挑战之一。
三、线性系统与非线性系统的区别1. 输入输出关系:线性系统的输入和输出之间存在线性关系,而非线性系统的输入和输出之间不存在线性关系。
2. 叠加原理:线性系统满足叠加原理,输入信号的响应是可加性的;而非线性系统不满足叠加原理,输入信号的响应不可加性。
3. 尺度不变性:线性系统满足尺度不变性,输入信号的放大或缩小会相应地改变输出信号的幅度,但形状保持不变;而非线性系统不满足尺度不变性,输入信号的放大或缩小可能改变输出信号的形状。
现代控制理论复习题库

一、选择题1.下面关于建模和模型说法错误的是( C )。
A.无论是何种系统,其模型均可用来提示规律或因果关系。
B.建模实际上是通过数据、图表、数学表达式、程序、逻辑关系或各种方式的组合表示状态变量、输入变量、输出变量、参数之间的关系。
C.为设计控制器为目的建立模型只需要简练就可以了。
D.工程系统模型建模有两种途径,一是机理建模,二是系统辨识。
2.系统()3()10()++=的类型是( B ) 。
y t y t u tA.集中参数、线性、动态系统。
B.集中参数、非线性、动态系统。
C.非集中参数、线性、动态系统。
D.集中参数、非线性、静态系统。
3.下面关于控制与控制系统说法错误的是( B )。
A.反馈闭环控制可以在一定程度上克服不确定性。
B.反馈闭环控制不可能克服系统参数摄动。
C.反馈闭环控制可在一定程度上克服外界扰动的影响。
D.控制系统在达到控制目的的同时,强调稳、快、准、鲁棒、资源少省。
x Pz说法错误的是( D )。
4.下面关于线性非奇异变换=A.非奇异变换阵P是同一个线性空间两组不同基之间的过渡矩阵。
B.对于线性定常系统,线性非奇异变换不改变系统的特征值。
C.对于线性定常系统,线性非奇异变换不改变系统的传递函数。
D.对于线性定常系统,线性非奇异变换不改变系统的状态空间描述。
5.下面关于稳定线性系统的响应说法正确的是( A )。
A.线性系统的响应包含两部分,一部是零状态响应,一部分是零输入响应。
B.线性系统的零状态响应是稳态响应的一部分。
C.线性系统暂态响应是零输入响应的一部分。
D.离零点最近的极点在输出响应中所表征的运动模态权值越大。
6.下面关于连续线性时不变系统的能控性与能观性说法正确的是( A ) 。
A.能控且能观的状态空间描述一定对应着某些传递函数阵的最小实现。
B.能控性是指存在受限控制使系统由任意初态转移到零状态的能力。
C.能观性表征的是状态反映输出的能力。
D.对控制输入的确定性扰动影响线性系统的能控性,不影响能观性。
非线性系统的线性方法

非线性系统的线性方法
非线性系统的线性方法包括线性化方法和仿射变换方法。
1. 线性化方法
线性化方法是将非线性系统在某一工作点处进行线性近似,然后应用线性控制理论对其进行分析和控制。
线性化方法通常包括泰勒级数展开和雅可比矩阵的计算。
2. 仿射变换方法
仿射变换方法是将非线性系统通过一系列仿射变换,变换成一个线性系统,然后应用线性控制理论对其进行分析和控制。
仿射变换方法常用的变换包括积分变换、对数变换、指数变换等。
需要注意的是,虽然非线性系统可以通过线性化方法和仿射变换方法进行线性化处理,但当系统存在强非线性、硬约束、不可逆性等特点时,这些方法的适用性会受到严重限制,需要考虑其他非线性控制方法。
现代控制理论智慧树知到答案章节测试2023年滨州学院
第一章测试1.系统前向通道传递函数阵为,反馈通道传递函数阵为,则系统闭环传递函数为()。
A:B:C:D:答案:B2.下面关于线性时不变系统的系统矩阵说法错误的是()。
A:由系统矩阵可以得到系统的运动模态。
B:具有相同特征值的系统矩阵,鲁棒稳定性是一样的。
C:系统矩阵的形式决定着系统的稳定性质。
D:系统矩阵不同,系统特征值可能相同。
答案:B3.下面关于状态空间模型描述正确的是()。
A:对一个系统,只能选取一组状态变量。
B:模型的阶数就是系统中含有储能元件的个数。
C:代数等价的状态空间模型具有相同的特征多项式和稳定性。
D:对于线性定常系统的状态空间模型,经常数矩阵非奇异变换后的模型,其传递函数阵是的零点是有差别的。
答案:C4.线性变换不改变系统的()A:状态变量B:特征值C:状态方程D:传递函数答案:BD5.对于同一控制系统,只能选取一组状态变量。
()A:对B:错答案:B第二章测试1.非齐次状态方程的解包含零状态响应和零输入响应两部分。
()A:对B:错答案:A2.系统的状态方程为齐次方程,若初始时刻为0,,则其解为()。
A:B:D:答案:A3.下面关于线性连续系统的状态转移矩阵描述错误的是()。
A:状态转移矩阵不唯一B:C:D:答案:A4.已知线性连续系统的状态空间表达式为,对该系统进行离散化为状态空间表达式为,其中采样周期为T,那么下列正确的是()A:H=BB:G=AC:C=CD:D=D答案:CD5.对于线性定常系统,若系统矩阵A为,则系统的状态转移矩阵为()。
A:B:1C:D:答案:C第三章测试1.下面关于连续线性系统的能观性说法错误的是()。
A:常数非奇异变换不改变系统的能观性。
B:能观性表征了输出反映内部状态的能力。
C:一个系统不能观,意味着存在满足D:系统状态若不完全能观,则一定可以将状态分成完全能观子空间和不完全能观的子空间,这两个子空间完全正交。
答案:C2.下面关于连续线性系统的能控性说法正确的是()。
第七章__非线性系统分析
输出
铁磁部件的元件
输入
电液伺服阀中的力矩马达
输出
非单值非线性
输入
7、静摩擦与动摩擦
静摩擦 M1
M2
Mf
动摩擦
0
x
直流电动机的方框图
摩擦力矩示意图
摩擦非线性对小功率角度随动系统来说,是一个很 重要的非线性因素。它的影响,从静态方面看,相当于 在执行机构中引入了死区,从而造成了系统的静差,这 一点和死区的影响相类似。
第七章 非线性系统分析
☆非线性数学模型的线性化 ☆典型非线性特性 ☆描述函数与典型环节描述函数 ☆用描述函数分析非线性系统 ☆改进非线性系统性能的方法
第一节 非线性数学模型的线性化
绝大多数物理系统在参数某些范围 内呈现出线性特性。当参数范围不加限 制时,所有的物理系统都是非线性的。
对每个系统都应研究其线性特性和相 应的线性工作范围。
D(s) 1 N( A)G(s) 0
N ( A) 1
G(s) 1 N ( A)
负倒描述函数(描述函数负倒特性)
1
?
N ( A)
线性系统
1 G(s) 0
G(s) 1
(乃奎斯特判据) 若开环稳定,则闭环 稳定的充要条件是 G(j) 轨迹不包围G平 面的(-1,j0)。
第三节 描述函数与典型环节描述函数
一、描述函数
X sint
系统或元件
y(t )
将 y(t) 表示为富氏级数形式
y(t) A0 ( An cos nt Bn sin nt) n1
A0 Yn sin(nt n ) n1
式中:
An
1
2
非线性系统的线性化处理方法

非线性系统的线性化处理方法,√j}/Z非线性系大连晨光科技开发邮王士和Tp~?/,2.在各种电气设备,自动控制装置,检查与测线段联结,用于分f与”0,则得到分段线性量用仪器仪表中经常碰到线性或近似线性系统.但是,在很多情况下,也会碰到非线性系统问题关于线性系统的理论分析与计算方法在许多文献中已有讨论但是,非线性系统的理论分析与计算方法在近二十年来一直引起人们的关注还有许多线性系统问题尚待讨论.本文试图就非线性系统中一些分支问题,探讨若干处理方法这里讨论的是稳态情况下若干种非线性问题的处理方法:1.线性化法(或分段线性化法);2.函数化法(或分段函数化法),或称经验公式法;3.数字化法等等.‘一,线性化法(或分段线性化法)假设有一含非线性铁心的电路.其磁化曲线具有图1a所示形状.由图可以看出,这是非线性的但是,如果通过原点至急剧弯曲部分画一条斜线oa代替oa弯曲线时,在理论分析与计算上可以得到符合工程实际需要的分析结论与计算结果.这一类处理工程计算的方法.称谓线性化法.H图1如果将磁化曲线画分成若干段.如图1b所……示.将O1,12,23,34,蛎,56各弯曲段甩近似直线n《■气开曩》(199鼍蹄Io-●)化法显然.它比线性化法更逼真一步.在工程分析与计算上将给出更满意的结果.二,函数化法(或分段函数化法)函数化法是将非线性特性曲线近似地用一个经验公式表达,用来分析各种工程技术问题. 显然,它能够给出的计算精确度决定于经验公式与实际曲线逼近程度例如.图l给出的磁化曲线可以用下式表示,即B:,(H)(1)或H一()(2)详见参考文献1中表1—1所示由各作者给出的磁化曲线经验公式.分段函数法是将非线性曲线分割成若干段,然后对各小段分别用某一函数表示.用这些表达式分析与处理各种技术问题.显然,比前一种方法更逼真一步.但是,应用上会带来许多麻烦.计算机的出现,给解决这类工程问题带来了方便.可以看出,分段线性化方法可视作分段函数法的一个特倒.三,数字化方法数字化方法实际上是将一连续变化的非线性特性曲线实施离散化,将其储存在计算机内, 根据计算程序需要随时调用(详见文献2)以上讨论了非线性系统的直接处理方法.主要用于:非线性元件,非线性线路非线性控制,测量与检查等系统的分析与计算.下面讨论若干间接处理方法四,非线性系统的线性变换法图2中的A环节是一个非线性元件或网路,B环节是另一个非线性元件或网络.此方法的基本思想是A环节在系统中无法直接应用其非线性输入一输出特性用B环节具有另一种非线性输入输出特性来补偿.如果B环节设一25—._,●计合理.可使总的输入一输出特性线性化,如图3所示.因此B环节称作对-A环节的整直环节(或元件).设A环节具有非缉眭函数关系X2= f.(x),B环节具有另_非线性爵数关系Xa—f(x).经过综合后.得到总的输入一输出特性为X.一c.X+线性关系.这就是通过整直环节(或元件)B将非线性环节(或元件)A的菲线性系统实现线性化的线性变换法.如果得到图3的直线,再进行技术处理就很方便.例如.如欲得到X一O时.xf一0{在x正向增加时x也正向增加.只需要在B环节后再增设一级移位倒向环节C就可H实现如图4,5趼示,网?I警l3—26I4瞄5五,非线性系统的补偿网路法非线性元件(或装置)采用线性R,L,C或非线性半导体器件等组成元件或网路可以对其非线性逐段地进行朴偿,以l达到更精确的变换, 例如,目前工业上应用的热电偶上采用的各种温度一电压线性变换网路等.六,非线性系统的数字化处理方法此方法与第四章相似,只是将非线性元件(或装置)输出的模拟量用集成电路(模片)交换成数字量,即进行A/D转换.但此数字量尚须经过专用单片机(例如EPROM或EEPR0M)处理之后,才能整直,送给数字显示器或其他控制部件.这时显示器的指示量与非线性元件(或装置)的输入量呈线性关系,关于其它特殊类型的非线性元件(或装胃=)的非线性特性需要根据要求进行线性化,例如, 开关控制元件对发电机进行电压自动调整等需要特殊处理,而不一定要求对其作线性化处理, 关于这些问题,可参考文献3,4.综上所述.在遇到非线性系统问题时.可以参考上面提出的方法进行处理当然.还可根据不同的具体问题提出新的处理方法,对于这方面的具体理论和技术工作,不仅需要对控制系统及其控制的对象有深刻的了解.而且还要有丰富的元器件的理论与实际知识.参考文献[1]王士和缩自动电礁装置,大连铁道学院, 1985[2:张冠生主编电器学,规被】:业m版社】980_l3]扬自厚主编自动控制原理,精金1:业出暖社,198O[4]蔡尚峰主编.自动控制理沧,机被业m版社,198l[5]尤德裴主编数字化酬量技术眨但器.机械】= 业出版社1980[6]常健生缩.捡j羹I与转换技术.机被丁=业m版社,1981[7]王士和郭永波带热电阻捡渊播的解舟折法电杂志】99o3[8]王士和孝章武王常有智艟化湿度控制倥●气开善》(1995N0_4)。
第七章非线性系统的分析
2、死区非线性
x1 ≤ ∆ 0, x2 = k ( x1 − ∆signx1 ), x1 > ∆
1 signx1 = −1
x1 > 0 x1 < 0
在实际系统中死区可由众多原因引起,它对系统可产生不同的 影响:一方面它使系统不稳定或者产生自振荡;另一方面有时 人们又人为的引入死区特性,使系统具有抗干扰能力。
第七章 非线性控制系统
7-2
1、饱和非线性
kx1 = x2 = ka x2 m −ka = − x 2m
典型非线性环节
x1 < a x1 ≥ a x1 ≤ −a
x2m
x2
−a
0
k
a
x1
此处:输入 x1 − − − − x2 − − − −输出 k − − − −比例系数
− x2m
第七章 非线性控制系统
第七章 非线性控制系统
4)混沌(Chaos)
蝴蝶效应( The Butterfly Effect) 是指在一个动力系统中,初始条 件下微小的变化能带动整个系统 的长期的巨大的连锁反应。这是 一种混沌现象。 核心理念:看似微不足道的细小 变化,却能以某种方式对社会产 生微妙的影响,甚至影响整个社 会系统的正常运行。
第七章 非线性控制系统
r(t)
e(t)
N(A,ω) NLS
x(t)
G(s)
c(t)
非线性系统的闭环“传递函数”:
G ( jω ) N ( A, ω ) Φ ( jω ) = 1 + G ( jω ) N ( A, ω )
0 闭环“特征方程”: 1 + G ( jω ) N ( A, ω ) =
即
1 G ( jω ) = − N ( A, ω )
非线性系统线性化

化。
令状态偏差为 e x xd ,则有e x xd
由式(1.1)和式(1.2)可得系统的状态偏差方程为:
e x xd f (x,u,t) ( Ad xd Bd v) Ad e [ f (x,u,t) ( Ad x Bdv)] (1.3)
按上述思想,提出如下的基于平衡状态控制原理的非线性控制系统反馈线 性化的直接方法:
(1)按系统的动态性能要求设计一满足希望特性的线性动态系统作为模 型参考系统。
(2)以模型参考系统的状态作为实际被控系统的被控平衡状态。利用李 亚普诺夫直接方法设计控制律使系统对动平衡状态渐进稳定。从而被控系统近 似具有模型参考系统的动态特性,实现非线性系统的反馈线性化。
在非线性系统的模型参考方法中,基于李亚普诺夫直接方法的非线性系统 反馈线性化方法是最重要和最有效的一种设计方法,这类方法称为非线性系统 反馈线性化的直接方法。
运用控制系统动平衡状态的概念,提出一种建立在控制系统动平衡状态渐 近稳定概念上的新的设计方法。本方法认为:控制系统的输入直接控制的是系 统的动平衡状态。系统的输出和状态是在系统结构的约束下运动的。当系统对 其平衡状态大范围渐近稳定时,其状态将在系统结构约束下渐近收敛于系统的 平衡状态。当其平衡状态运动时,系统的状态亦将跟踪其平衡状态运动。因此 控制系统平衡状态的运动,即可实现对系统运动状态及输出的控制。
基于动平衡状态理论的非线性系统反馈 线性化直接方法
按上述方法,基本设计过程如下:
考虑一般的非线性系统
x f (x,u,t)
(1.1)
其中,x Rn 为状态向量,u Rm 为控制向量,f 为向量函数。
设希望的线性系统动态特性为
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
间而变化的信号时,系统对输出信号的影响。
线性系统动态特性
●线性系统的基本定义是:该系统的输入(激励)
x(t)和输出(响应)y(t)存在着解析关系: d n y (t ) d n 1 y (t ) dy(t ) an an 1 a1 a0 y ( t ) n n 1 dt dt dt d m x (t ) d m 1 x (t ) dx(t ) bm bm 1 b1 b0 x (t ) m m 1 dt dt dt
●式中:
an , bm -该系统的结构特性参数
n m d y ( t ) d x (t ) -该系统输出、输入对时间的 ● , n dt dtm 各阶微分。系统的阶次由输出 量最高微分阶次决定。
线性系统动态特性-举例
●线性系统就是在此方程式中不包含变量及其各阶微
分的非一次幂项(包括交叉相乘项),如果线性系 统方程中各系数 an , bm 在工作过程中不随时间和输 入量的变化而变化,则该系统称为线性定常系统。
引起的输出为
y(t ) y0e
j (0t )
频率保持特性的含义
●线性系统具有频率保持特性的含义是输入信号的频
率成分通过线性系统后仍保持原有的频率成分。如 果发现输入和输出信号的频率成分不同,则该系统 就不是线性系统。
非线性系统 特性
输出信号
如余弦信号通过非线性 系统(二极管),则输 出被整流,其频率成分 被改变。
3.1测试系统的描述
● ●
1、静态特性
2、动态特性
动态特性
●系统模型的划分 线性系统与非线性系统 线性系统:具有叠加性、均匀性的系统 连续时间系统与离散时间系统 连续时间系统:输入、输出均为连续函数.描述系 统特征的为微分方程. 离散时间系统:输入、输出均为离散函数.描述系 统特征的为差分方程. 时变系统与时不变系统: 由系统参数是否随时间而变化决定.
动态特性(续)
●我们仅讨论线性、时不变,简称为线性定常系统,
就是可以用常微分方程描述的系统。 因为:对线性定常系统进行分析的理论和方法最 为基础、最成熟,同时其它系统通过某种假设后可近 似作为线性定常系统来处理。 近似性:非线性系统近似为线性系统;高阶系统近 似为低阶系统;时变系统近似为常系数系统;非平稳随 机过程近似为平稳随机过程等.
x1(t) x2 (t)
引起的输出为
y1(t ) y2 (t )
线性系统的性质--比例特性
若: 则:
x (t )
引起的输出为
y (t )
ax(t )
引起的输出为
ay(t )
线性系统的性质--频率保持性
若: 则:
x (t )
引起的输出为
y (t )
j0t
x(t) x0e
频率特性
输入信号
d 2uc (t ) duc (t ) ur (t ) LC RC uc (t ) 2 dt dt
可见此电路是线性系统,如果电气结构参数R、L、 C在运行过程中不发生变化,则是定常系统。
线性系统的性质--叠加性
x1(t ), x2 (t) 引起的输出分别为 若:
则:
y1(t ), y2 (t )
●举例1:RC电路,如果输
入电压是随时间变化的
uc (t ),其输出是随时间变
化的电压 ur (t ) ,则可建立输入和输出之间的 微分方程: u (t ) RC du c (t ) u (t )
r
dt
c
线性系统动态特性-举例
举例2:RLC电路,如果 输入电压是随时间变化 的 uc (t ) ,其输出是随 时间变化的电压 ur (t ) ,则可建立输入和输出之间 的微分方程: