第二章起飞性能
滑翔机设计与飞行性能研究
滑翔机设计与飞行性能研究第一章滑翔机的定义与分类滑翔机可以简单地理解为没有发动机的飞行器,靠从高处滑行获得动力。
根据滑翔机的形态和性能特点,可以将其分为多种类型。
1.1 传统滑翔机传统滑翔机是最常见的一种类型,具有较长的展弦比和低阻力系数,适合进行长距离平稳的滑翔飞行。
这种滑翔机通常采用木材和复合材料结构,结构简单,较为经济。
1.2 教练用滑翔机教练用滑翔机通常有双座和多座机型,能够进行学生及教练员的培训。
这种滑翔机结构坚固,安全性高,但也牺牲了一些性能。
1.3 竞赛用滑翔机竞赛用滑翔机通常采用复杂的结构设计和高性能部件,能够在竞赛中获取更好的成绩。
这种滑翔机具有较高的滑翔比、翼型和尺寸优化等特点,但也具有较高的制造成本。
1.4 电动滑翔机电动滑翔机是近年来发展起来的新型飞行器,结合了传统滑翔机的特点和电动飞机的优势。
这种滑翔机具有较好的起飞和爬升性能,同时也能够进行长时间的滑翔飞行。
第二章滑翔机的设计滑翔机的设计涉及多方面因素,包括机身结构、翼型、气动布局、起落装置、重心位置等。
以下是针对这些方面的简要介绍。
2.1 机身结构滑翔机的机身结构应具有足够的强度和刚度,能够承受各种复杂的载荷和振动。
机身结构的材料通常为木材或复合材料,优化结构设计可提高飞行性能。
2.2 翼型和气动布局翼型和气动布局是滑翔机设计中最重要的部分之一。
翼型的优化可明显提高滑翔比和飞行性能,而气动布局也直接影响了机翼和机身的气动特性。
常见的翼型包括高升力翼型、低速适应型翼型、削弱悬挂翼型等。
2.3 起落装置滑翔机通常采用起落架和轮胎,以便在起飞和着陆时更好地控制机身。
起落架的结构要求轻便耐用,同时也能够承受一定的载荷。
2.4 重心位置滑翔机的重心位置是影响其飞行特性和稳定性的重要因素之一。
重心位置的选择需要考虑翼型、机身结构、载荷分布等多方面因素,通常要进行多次模拟和试验证实。
第三章滑翔机的飞行性能滑翔机的飞行性能主要包括滑翔比、最大滑翔距离、爬升性能等。
md500t0g说明书
md500t0g说明书MD500T110G飞机说明书第一章:飞机概述1.1引言:本章节主要介绍MD500T110G飞机的基本特性和应用领域。
第二章:飞机结构2.1概述:本章节主要介绍MD500T110G飞机的结构组成和各部件的功能。
2.2机身结构:本节主要介绍MD500T110G飞机的机身结构,包括机身的设计特点和使用的材料。
2.3机翼结构:本节主要介绍MD500T110G飞机的机翼结构和机翼上安装的设备。
2.4尾翼结构:本节主要介绍MD500T110G飞机的尾翼结构和尾翼上安装的设备。
2.5起落架:本节主要介绍MD500T110G飞机的起落架结构和起落架的特点。
第三章:动力系统3.1主要组成:本节主要介绍MD500T110G飞机的动力系统的主要组成部分,包括发动机和传动系统。
3.2发动机特点:本节主要介绍MD500T110G飞机所使用的发动机的特点,包括功率、燃油消耗等方面的性能指标。
3.3传动系统:本节主要介绍MD500T110G飞机的传动系统,包括传动轴、传动齿轮等。
第四章:航电系统4.1介绍:本章节主要介绍MD500T110G飞机的航电系统的组成和功能,包括自动驾驶、导航、通信等系统。
4.2自动驾驶系统:本节主要介绍MD500T110G飞机的自动驾驶系统,包括自动驾驶仪和自动驾驶控制器。
4.3导航系统:本节主要介绍MD500T110G飞机的导航系统,包括惯性导航系统和全球定位系统等。
4.4通信系统:本节主要介绍MD500T110G飞机的通信系统,包括对讲机、航空电台等。
第五章:飞行性能5.1最大速度:本节主要介绍MD500T110G飞机的最大速度和相关的飞行性能指标。
5.2航程和续航时间:本节主要介绍MD500T110G飞机的航程和续航时间,包括燃油消耗等计算方法。
5.3爬升率和升限:本节主要介绍MD500T110G飞机的爬升率和升限的相关性能指标。
第六章:操作手册6.1飞机起飞前检查:本节主要介绍MD500T110G飞机起飞前的检查事项和流程。
arj21飞机飞行手册
arj21飞机飞行手册第一章:引言ARJ21飞机是中国自主研发的新一代支线客机。
本飞行手册将提供ARJ21飞机的综合信息和操作指南,以确保飞机运行的安全和高效。
第二章:概述ARJ21飞机是一种双引擎支线客机,可容纳90-105名乘客。
整个机身采用了高强度复合材料,具有良好的载荷能力和抗腐蚀性能。
飞机装备有先进的电气系统和航空电子设备,这些设备为飞机的操作提供了准确可靠的数据。
第三章:性能ARJ21飞机的性能包括最大起飞重量、巡航速度、航程等参数。
飞行员需要了解这些性能数据,以便正确计划飞行任务。
第四章:飞行仪表飞行仪表对飞行员的操作至关重要。
ARJ21飞机的飞行仪表系统包括一台先进的玻璃座舱显示系统,提供清晰准确的数据和地图信息。
飞机还装备有自动驾驶系统,可辅助飞行员进行自动驾驶操作。
第五章:操纵操纵是飞行员控制飞机的关键技能。
本章将介绍ARJ21飞机的操纵系统,包括操纵杆、脚踏板和副翼等。
飞行员需要熟悉操纵系统的操作方法和技巧,以确保飞机的稳定和平稳飞行。
第六章:系统ARJ21飞机的系统包括发动机、燃油、液压、电气等。
本章将介绍每个系统的结构和特点,以及相关的操作步骤和注意事项。
飞行员需要在飞行前检查每个系统的工作情况,并按照手册要求操作和维护。
第七章:应急程序应急程序对于飞机的安全至关重要。
本章将介绍ARJ21飞机的应急程序,包括发动机失效、氧气系统故障、火警等。
飞行员需要熟悉这些应急程序,以确保在紧急情况下能够正确应对。
第八章:通信与导航ARJ21飞机配备了先进的通信和导航设备。
本章将介绍这些设备的使用方法和操作技巧,包括VHF无线电通信、天线导航系统、ILS仪表着陆系统等。
飞行员需要熟练运用这些设备,以确保飞机的导航和通信能力。
第九章:操作程序本章将介绍ARJ21飞机的常规操作程序,包括起飞、爬升、巡航、下降和着陆。
飞行员需要熟悉这些程序,并按照手册要求进行操作,以确保飞机的安全和高效飞行。
2651_起飞分析表使用方法_V2
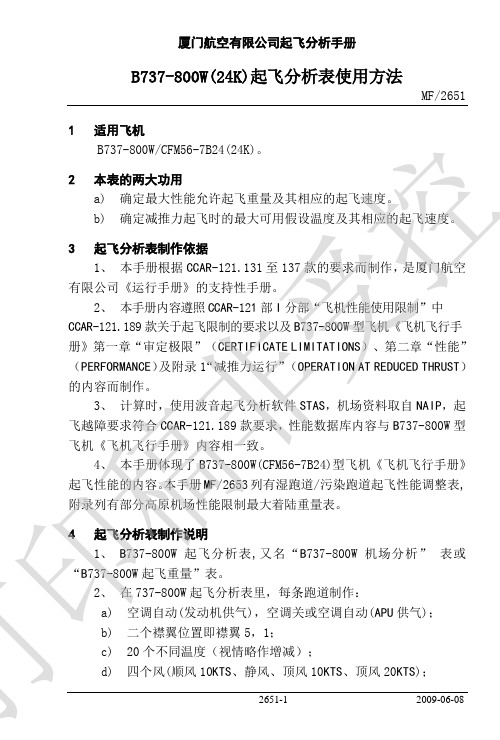
图2
7查取最大可用假设温度
如果实际的起飞重量小于性能限制的最大允许起飞重量,则可考虑使用假设温度法进行减推力起飞,以降低发动机的维护成本并提高其工作可靠性。查取方法如下(见图3):
1、在爬升限制重量列,向上移动逐渐找出重量等于或最接近但仍大于实际重量值的爬升限制重量值,再左移查出其对应的温度值A。
715**49-50-54 725**53-54-58 732**56-58-61
50 718 697*/44-45-50 718*/47-48-52 718*/47-48-52 742*/48-48-52
727**50-51-55 736**53-55-58 744**57-58-62
48 732 708*/45-46-51 732*/48-49-53 732*/49-49-53 754*/49-49-53
5查取性能限制的最大允许起飞重量——正常爬升
当得知起飞使用跑道、起飞襟翼和空调使用状况后,可根据气象资料(气温及风),参照以下图1方法查取该次起飞的允许起飞重量。
气温 爬升限制 风 分 量 (海里/小时,负值表示顺风)
℃ 100千克 -10 0 10 20
56A682 666*/41-42-46 682*/44-44-48 701*/44-44-48 707*/44-44-48
4起飞分析表制作说明
1、B737-800W起飞分析表,又名“B737-800W机场分析”表或“B737-800W起飞重量”表。
2、在737-800W起飞分析表里,每条跑道制作:
a)空调自动(发动机供气),空调关或空调自动(APU供气);
b)二个襟翼位置即襟翼5,1;
c)20个不同温度(视情略作增减);
A321机型 1A320机型性能分析
A320系列机型性能分析目录第一章起飞概述最大起飞重量的计算(重量输入)灵活起飞(重量输入)QNH/引气修正最小速度快速参考表净起飞航道第二章着陆着陆自动刹车系统的使用第三章特殊操作液体污染的跑道无缝翼转场飞行客舱无增压飞行起落架在放下位飞行高高度操作飞越山区延程飞行发动机混合操作减小最低垂直间隔(RVSM)RNP(要求的导航性能)第四章飞行计划概述计算表巡航高度综合巡航飞行计划的快速确定备降地面距离/空中距离的转换加油第一章起飞性能. 一般介绍起飞图表用于提供起飞时的性能。
该图表有两种表现形式,温度输入(左栏中提供有温度)和重量输入(左栏中提供有重量),可由航空公司选择其中一种。
由于我公司选用的是重量输入,所以下面的性能分析以重量输入为主,温度输入形式只作简单介绍。
1.概述(1). 起飞性能根据给定的跑道及其障碍物和给定的襟翼设定,温度,风况和QNH等条件计算最佳起飞性能。
计算产生一允许的最大起飞重量(或对应于实际重量的最大起飞温度)。
最佳化的过程计算产生最大起飞重量的速度。
为做到这一点,这一过程考虑到各种起飞极限,例如TOD(起飞距离),ASD(加速停止距离),TOR(起飞滑跑),第二爬升阶段等等。
在一典型跑道上,双发飞机的性能通常受到起飞单发操作的限制。
因此,最佳V2/V S和最佳V1/VR值是唯一的。
(2). 起飞图表说明起飞图表(RTOW:调KT的起飞重量)根据指定的飞机型号及图表顶端指定的跑道计算得出,顶端还提供关于跑道的一些信息并列出计算的假定条件。
该图表给出2种外形形态对于每种形态都有五种风值的图表。
机组能够根据给定形态选择:①最大允许起飞重量,或根据给定的重量选择,②最大灵活温度。
如果不同形态图表给出相同的性能,机组应选择与最小起飞速度相对应的外形形态。
图表左栏含有重量条目。
对于每一重量条目和条件,图表提供下列信息:可用限制代码为:爬升第一阶段--1,爬升第二阶段第-阶段--2,跑道长度--3,障碍物--4,轮胎速度--5,刹车能量--6,最大计算重量级--7,最后起飞--8,VMU(最小离地速度)--9①.由于不同的起飞条件所作的修正每张起飞图表都是根据一系列图表顶端给定的条件(空调,QNH,防冰……)计算得出的。
飞机的运行和性能
50 英尺
V=0
着陆距离
各飞行阶段飞行事故比例
2、飞行剖面
飞行剖面是飞机完成一次飞行任务各个阶段的飞行轨迹(航 迹)在垂直剖面上的投影图形,是飞机在不同时间(或距离) 上的高度所表示出来的图形。它是飞行计划的依据和基础。
标准的飞行剖面
航程油量
滑行 油量
停机坪
松刹车 起飞机场
进近
接地 目的地机场
第二章民用航空器
第七节 飞机的性能
(1)parking
(2)pushback and start up
(3)taxi
(4)take off
(5)climb
(6)cruise
(7)approach
(8)landing
飞机的飞行过程
1、飞机的飞行阶段和性能—起飞
起飞---从跑道端从刹车开始,到飞机 离地面1500ft(450m),是飞机起 飞阶段。
航路备份 油量
滑行 油量
备用飞行剖面
航程油量
等待油量 备份油量
停机坪
松刹车 起飞机场
进近
复飞 接地 目的地机场
备降机场
3、飞机各种重量的关系
(1)最大起飞重量(MTOW):飞机在跑道头开始起动的重 量,是飞机结构允许的最大总重量。
(2)最大着陆重量(MLW):飞机在着陆时允许的最大重量 。应考虑着陆时对飞机的冲击。
减速
下降速度 250 kt(ATC 限制)
10000 ft
减速到进近速度
1500ft
着陆
1、飞机的飞行阶段和性能—进近和着陆阶段
进近阶段:从规定点开始,在管制员指挥下沿规定路径减速 ,下降对准跑道的过程,该过程到飞机以50英尺高度飞越 跑道头。
飞行性能
式中, 零升阻力, 升致阻力, 式中,D0 —零升阻力,Di —升致阻力, 零升阻力 升致阻力 低速飞行时, 基本不随M数改变, 成正比, 低速飞行时,A基本不随M数改变,D0与速度V2成正比, Di 与速度V2成反比,如图2-2b中虚线。图中,实线为总阻力。 成反比,如图2 2b中虚线 图中,实线为总阻力。 中虚线。 最小, 称为有利速度 有利速度, 当D0=Di时,Tr最小,此时速度Vf称为有利速度,升阻比为Kmax。 2a, 点 升阻极曲线斜率最大) (图2-2a,a’点,升阻极曲线斜率最大) 当升力系数最大时(临界攻角, 2a最高点 最高点) 当升力系数最大时(临界攻角,图2-2a最高点) ,平飞速度最 2b, 小(图2-2b,b点)
2.速度特性 2.速度特性 指高度H 发动机转速n不变时,推力T 指高度H、发动机转速n不变时,推力T随V(M)变化关 系 速度增加时,先略有下降,再随M数增加而增加, 速度增加时,先略有下降,再随M数增加而增加, M>1后 数增加而下降(防止涡轮过热损坏, M>1后,随M数增加而下降(防止涡轮过热损坏,降 低油量的限制措施)。 低油量的限制措施)。 3.高度特性(虚线) 3.高度特性(虚线) 高度特性 推力随高度变化特性。 推力随高度变化特性。 图中H增大,空气密度下降, 图中H增大,空气密度下降, 发动机推力下降。 发动机推力下降。
Tr = D = 1 ρV 2 SCD 2
G=L=
1 ρV 2 SCL 2
两式相除, Tr / G = 1/ K , K = CL / CD , K—升阻比 两式相除, 升阻比越高,平飞需用推力越小。 Q G = Tr K 升阻比越高,平飞需用推力越小。
第二章起飞性能(学习课件)

V2取(1)和(2)的大者。
23
2.1.2 净空道和安全道
Takeoff Runway Definitions
24
1. 跑道的定义
7
1. 地面最小操纵速度(VMCG)
在起飞加速滑跑中,如果关键发动机失效时的速度低于此速 度,起飞必须中止。
Runways where width is between 30 and 45 m: For runway width > 40 m, the performance remains
unchanged, For runway width < 40 m, VMCG must be increased by 2.5
17
5. 起飞决断速度(V1)
Takeoff Decision Speed
飞机在该速度上被判定关键发动机停车等故障时,飞 行员可以安全地继续起飞或中断起飞,中断起飞的距离 和继续起飞的距离都不会超过可用的起飞距离。
V1是采取第一项制动措施的最迟时机,而不是做决策 的速度,也不是识别速度。
18
5. 起飞决断速度(V1)
21
8. 起飞安全速度(V2)
Takeoff Safety Speed
V2是飞机起飞上升至35ft应该达到的速度。 只要飞机的速度达到V2,飞机的上升梯度就能达到相 关要求。
22
8. 起飞安全速度(V2)
Takeoff Safety Speed
● 要求
(1) V2min V2min≮ 1.2 VS 或 1.15 VS V2min≥1.1VMCA
kt.
The pilot’s action : recover control of the aircraft enable safe take off continuation
航空公司飞行安全手册

航空公司飞行安全手册第一章:前言航空是一项高度复杂和危险的行业,随着航空运输业的迅速发展和扩大,飞行安全成为航空公司最重要的关注点之一。
本手册旨在向航空公司的工作人员提供全面且准确的飞行安全指南,以确保航空公司的飞行操作始终符合最高标准,保护乘客和机组人员的生命安全。
第二章:飞行准备2.1 飞行任务分析在每一次飞行任务前,飞行员和机组人员必须进行飞行任务分析。
这一分析过程包括对飞行任务的详细了解,评估可能出现的风险和挑战,并制定相应的飞行计划。
2.2 天气状况评估天气是影响飞行安全的关键因素之一。
在飞行前,必须对天气状况进行全面评估,并根据天气预报和实时天气信息做出相应决策。
如果天气状况不适宜飞行,必须及时采取取消或延迟飞行的措施。
2.3 机动性能计算飞行前必须进行机动性能计算,确保飞机在起飞、爬升、巡航、下降和着陆的各个阶段都具备足够的性能。
这包括对飞机重量、气温、高度和跑道长度等因素的综合考虑。
第三章:飞行操作3.1 起飞和爬升起飞和爬升阶段是飞行中最关键的时刻之一。
飞行员必须按照飞行手册中的程序执行起飞,并注意飞机的姿态、速度和航向等参数。
同时,飞行员必须密切监控飞机的仪表和警告系统,以应对任何潜在的飞行风险。
3.2 巡航巡航是飞行中的稳定阶段,飞行员必须保持飞机在指定的航线上,并与空中交通管制保持良好的沟通。
在巡航期间,飞行员还需要根据飞行计划进行燃油管理,确保飞机具备足够的燃油储备。
3.3 下降和着陆下降和着陆是飞行中最危险的阶段之一。
飞行员必须根据相关程序进行下降和着陆操作,并在接近着陆前进行适当的高度和速度调整。
在着陆前,飞行员必须确保机场跑道和航道的可见度和条件适宜,并进行相应决策,确保安全着陆。
第四章:应急情况处置4.1 火警应急处置在飞行过程中,如果出现火警情况,飞行员必须立即采取相应的应急处置措施。
这包括通知机组成员和乘客、执行火警处置程序,并在可能的情况下尽快着陆。
4.2 气象恶劣应对在飞行过程中遭遇气象恶劣情况是常有的事。
民航飞机的性能
第二章 第七节民航飞机的性能
17
18
第二章 第七节民航飞机的性能
三、飞行性能
起飞性能 爬升性能 巡航性能 着陆性能
19
ቤተ መጻሕፍቲ ባይዱ
第二章 第七节民航飞机的性能
1、起飞性能
密度高度 总重和平衡 风向 跑道道面
20
第二章 第七节民航飞机的性能
总重和平衡
Z
2.540m
18.850m 17.8015m
25%RC
10
第二章 第七节民航飞机的性能
1、飞机的飞行阶段和性能—巡航阶段
B Climb speed (KIAS)
260 280 300
C
220 240 260
BC之间是飞机巡航阶段
11
第二章 第七节民航飞机的性能
1、飞机的飞行阶段和性能—巡航阶段
PA
Real cruise
weight
巡航高度的选择
12
飞行高度
飞行高度主要受发动机性能的影响 通常喷气式飞机的巡航高度在9000~13000米,
活塞式发动机飞机的巡航高度在5000米左右
23
第二章 第七节民航飞机的性能
着陆性能
保证飞机的进近姿态和航路的正 常
保持正确的进近速度(襟翼、缝 翼)
24
第二章 第七节民航飞机的性能 4、飞机的经济性能
燃油利用率 维修性和可靠性 适应性 飞机的初成本
25
第二章 第七节民航飞机的性能
5、6、飞机的安全性与舒适性
26
27
第二章 民用航空器
第七节 民航飞机的性能
第二章 第七节民航飞机的性能 飞行计划和飞行剖面 业载航程图 飞行性能 经济性能 安全性 舒适性
第二章起飞性能方案

● 要求 (1) V1≥ V1(MCG) V1(MCG)=VMCG+△v
(2) V1≤VR
(3) V1≤ VMBE
2019/9/182005-3-7
8
6 离地速度(VLOF) 飞机起飞滑跑中,当加速到升力等于重力这一瞬间的速度。
L
W1
W2 ( >W1 )
L可用
V继续 min1
V继续 min2
• 大气温度↑、机场气压高度↑ , V继续min ↑
• 顺风起飞, V继续min↑
V识别
2019/9/182005-3-7
33
2.3.3起飞平衡距离(L平衡)和平衡速度(L平衡)
L L继需
L中需
L平衡
V平衡
V识别
平衡速度:继续起飞距离和中断起飞距离相等时的识别速度。 重量增大,平衡距离和平衡速度都增大。
例: 机场气压高度3000FT、气温 25℃、跑道上坡1%、逆 风分量20KT条件下,飞机起飞襟翼5,起飞重量55000KG, 确定飞机的起飞速度?
2019/9/182005-3-7
40
1、由气压高 度3000FT、 气温 25℃ 确
7 起飞安全速度(V2) V2是飞机起飞上升至35ft应该达到的速度。
● ● 要求
(1)V2min V2min≮1.2VS或1.15VS
V2min≥1.1VMCA
(2) VR加上达到高于起飞表面35英尺前所获得的速度增量
V2取(1)和(2)的大者。
2019/9/182005-3-7
9
8 净空道
净空道是指在跑道头的一段宽度不小于500英尺,沿跑道方向的向 上延伸的坡度不大于1.25%,无任何障碍物的一块区域,其中心线是跑 道中心线的延长线,并受机场有关方面管制。
空中交通管制员执照考核复习题
中国民用航空航行情报员执照考核试题汇编第三版~2000年中国民用航空总局空中交通管理局前言改革开放以来,中国民用航空以前所未有的速度向前发展,取得了巨大进步,受到世界各国的瞩目。
航空技术的发展和计算机技术的应用,促进了空中交通的发展,同时也促进了航行情报的技术进步。
航行情报自动化的使用和电子航行资料的出现,使传统的手工方式和纸页资料受到挑战。
这不仅需要我们进行观念更新,而且要求我们学习新技术、新知识和新方法,以推进民航航行情报的现代化进程。
为了适应民航的高速发展,保证国内外飞行的需要,航行情报部门实施航行情报执照管理制度,保证了航行情报队伍的技术水平稳步提高。
新的《中国民用航空航行情报执照考核试题汇编》的出版,旨在推动航行情报的技术培训和执照考核工作,以提高民航航行情报服务水平,缩小同世界先进水平的差距,保证飞行的安全和正常。
《中国民用航空航行情报执照考核试题汇编》是编写人员和各地航行情报部门共同努力的结果。
民航飞行学院航行系和各地区管理局航行情报部门为本汇编的编写出版做了大量工作。
原总局航行司张刚司长等退休领导和专家参加了试题审核,提出了许多宝贵意见。
我们对大家的积极支持和认真工作表示衷心感谢。
由于水平所限,本汇编肯定存在不少问题,欢迎大家批评指正,以便再版修订。
编者2000年4月11日出版说明《中国民用航空航行情报员执照考核试题汇编》是为了适应民航科学技术的发展,配合新航空规章的实施,规范航行情报员执照的管理,满足现代民航运输对航行情报员的新要求,而在前两版航行情报员执照考核试题汇编的基础上编制完成的。
该试题汇编及其相关的计算机管理软件,力求使航行情报员的执照考核工作达到标准化、规范化和计算机管理化的目标。
《中国民用航空航行情报员执照考核试题汇编》是供中国民航航行情报员取得航行情报服务执照的考核复习试题集。
包括航空理论基础知识、航行情报服务、飞行程序设计、航行情报英语和地区性试题五大部分。
其中,航空理论基础知识包括航空法规、飞行原理和飞行性能、航空器和动力装置、航空气象、通讯导航监视设施、空中领航、空中交通管制、飞行签派和计算机知识等内容;航行情报服务包括航行情报服务规章、机场和机场使用细则、航图、杰普逊航图,航行通告和航行情报服务自动化等内容;航行情报英语包括英汉语互译、航行通告的认读和填发、航行情报服务英语词汇和减缩语等内容;地区性试题包括该地区所辖机场和航线的有关资料和规定。
飞行力学第二章2.4

f ( Ma, n)
LW
结论
2W 2W H 2 2 g ( Ma, n )W 2 2 C Lc H Ma S C Lc11 Ma S
一旦初始定直平飞,且保持Ma、n不变,巡航中无论 W,H如何变化,勿需调整CD(通过α)均能自动保持切向力平 衡,这时CL也不变。随燃油消耗,飞机缓慢上升(ρH )。
航程、航时
W1 dW dW 1 W1 11 K W1 tcr ~ ~ ln ln W2 gc W2 gc W gcf.t W2 gcf.11 W2 f.t f.t W1
Rcr
W1
W2
W1 dW dW 1 W1 c11 Ma11 K W1 ~ ln ln ~ W 2 gc gcf.R gcf.R W2 gcf.11 W2 f.RW
耗油特点
Cf.R, cf.t ~ V, H, n, W ; 构形
给定 随W 而变 随耗油 逐渐减轻 由任务决定否则 用净形
图解积分法求解 出发方程 计算步骤
1)将飞行重量分成N个区间,对每一区间取平均值Wav .
tcr
W1
K
gcfW
W2
dW ,
Rcr Vtcr
2)已知H
查大气表
ρ,c
8)计算、绘制
VK
gcf W
~ W 曲线
VK
gcf W
Wk 1 W1 k
Q f .a g
N 2k 1 Q f . a g Wav . k W1 2 N k 1,2,3,..., N
W N 1W N
W3 W2 W1
W
Rcr =Vtcr
例:求喷气式飞机巡航段的航程和航时
f ( Ma, H , n) f ( Ma, H , T) i
Boeing&Airbus起飞性能图表

Corrections must be applied !
第二章 第 36 页
- RWY WET
Wet correction for Tflex = - 2 °C Wind = 0 kt
第二章 第 37 页
YMML ATIS : - Takeoff runway 09 - CONF 2 - Temperature 25°C - Wind 0 kt - ATOW= 67 t - QNH 1013.25 hPa - Air Conditioning OFF - Total Anti-Ice OFF - Runway condition WET
例1:具体条件见下表,确定该条件下的最大起飞重量 及对应的速度V1/VR/V2.若实际起飞重量为67000kg,确 定该重量下的灵活温度及对应的V1/VR/V2。
YMML ATIS provides the following data : • Takeoff runway 09 • Takeoff configuration : CONF 2 • Runway condition WET • Wind 0 kt • Temperature 25°C • QNH 1013.25 hPa
第二章 第 13 页
图表说明:
Result box labels
第二章 第 14 页
图表说明:
障碍物限制代码
第二章 第 15 页
图表说明:
灰色条带表示受 VMCG/VMCA 限制
第二章 第 16 页
图表说明:
平台温度和最大审定的温度
第二章 第 17 页
图表说明:
一发失效时的最小和最大改平高/高度
Speeds V1 = 134 Kt
航空航天技术概论第二章飞行环境及飞行原理

(6)无尾式布局
无尾布局通常采用于超音速飞机。例如英 法合作研制了“协和”超音速客机采用的 就是无尾布局。
1、对流层 大气中最低的一层,特点是
其温度随高度增加而逐渐降低。 (0 ~18公里)
2、平流层 位于对流层的上面,特点是该层中的大气主要是水平方向流动,没有上下对流。(18~50公里)
3、中间层 中间层为离地球50到80公里的一层。在该层内,气温随高度升高而下降,且空气有相当强烈的铅
垂方向的运动.
点击播放
2.2.2 质量守恒与连续方程
取横截面1,2,3,假设在流管中流动的流体质量既不会穿越流管流出,也不会有其它流 体质量穿越流面流入,则通过流管各截面的质量流量必须相等。
v1
v2
在单位时间内,流过变截面管道中任意截面处的气体质量都应相等,即 该式称为可压缩流体沿管道流动的连续性方程。
1 v 1 A 1 2 v 2 A 2 3 v 3 A 3 常 数
2.4.3 临界马赫数
根据流体的连续性方程,当气流从A点流过机翼时由于机 翼上表面凸起使流管收缩,气流在这里速度增加;当气流 流到机翼最高点B时,流速增加到最大。当B点马赫数为1时, A点马赫数称为临界马赫数。
2.4.4 超音速飞行的空气动力外形及其特点 1、飞机几何外形和参数
飞机的几何外形主要由机身、机翼和尾翼等主要部件的 外形共同来组成。
歼8Ⅱ战斗机
(3)变后掠机翼
变后掠角飞机通过机翼后掠角的变化可以解决高低速性能要求的矛盾。飞机在起飞着陆和低速飞 行时,采用较小后掠角。这时机翼展弦比较大,因而有较高的低速巡航性能和较大的起飞着陆升力。 而在超音速飞行时,采用较大后掠角对于减小超音速飞行的阻力很有利。
(4)边条机翼 解决超音速飞机高速飞行和低速飞行矛盾的
2024年无人机培训教材

无人机培训教材第一章引言无人机,又称无人驾驶飞行器(UnmannedAerialVehicle,UAV),是一种通过遥控或自主飞行方式进行各种任务的航空器。
随着科技的发展,无人机在各个领域中的应用越来越广泛,如航拍、农业、物流、环境监测等。
为了确保无人机安全、高效地运行,提高无人机驾驶员的操作技能和理论知识,本教材旨在为无人机操作者提供全面、系统的培训内容。
第二章无人机基础知识2.1无人机分类与结构无人机按照用途可分为军用、民用和商业无人机;按照飞行原理可分为固定翼无人机、旋翼无人机和多旋翼无人机。
无人机的结构主要包括飞行器、导航系统、遥控系统、任务设备等部分。
2.2飞行原理与飞行性能无人机飞行原理主要包括空气动力学、飞行力学、飞行控制等。
飞行性能参数有飞行速度、飞行高度、续航时间、载重能力等。
2.3导航与飞控系统导航系统负责无人机的定位、导航和飞行路径规划。
飞控系统负责无人机的稳定飞行、姿态控制、自动起飞、着陆等功能。
第三章无人机操作技能培训3.1遥控器操作遥控器是无人机飞行操作的主要工具,操作者需熟练掌握遥控器的各个功能键、摇杆、开关等操作方法。
3.2起飞与着陆起飞与着陆是无人机飞行过程中最关键的操作环节。
操作者需掌握起飞、悬停、着陆等基本动作,确保无人机安全起飞和着陆。
3.3飞行姿态控制飞行姿态控制是无人机飞行过程中保持稳定的关键。
操作者需掌握无人机的前进、后退、上升、下降、左转、右转等飞行姿态控制方法。
3.4自动飞行与任务设备操作操作者需掌握无人机的自动飞行模式、航线规划、任务设备操作等技能,实现无人机的高效作业。
第四章无人机法规与安全4.1无人机法规无人机驾驶员需遵守国家关于无人机的相关法规,包括飞行空域、飞行高度、飞行速度等限制。
4.2飞行安全飞行安全是无人机飞行过程中的重要环节。
操作者需了解飞行安全知识,掌握应对突发状况的方法。
第五章无人机维护与保养5.1无人机检查与维护无人机在使用过程中需定期进行检查和维护,确保飞行安全。
第二章 起飞性能

时关键发动机停车,在其他发动机推力作用下继续起飞,到继续起飞 空中段的中点所经过的水平距离就是FAR继续起飞滑跑距离。
实际飞行中,应保证: FAR继续起飞距离≤继续起飞可用距离
对于有净空道的情况,还应保证: FAR继续起飞滑跑距离 ≤继续起飞滑跑可用距离
L L继需
L中需
L平衡
V平衡
V识别
平衡速度:继续起飞距离和中断起飞距离相等时的识别速度。 重量增大,平衡距离和平衡速度都增大。
22022.10/1.200/12032005-3-7
34
2.3.4 起飞决断速度(V1)和跑道限制的MTOW
1 平衡场地法
平衡跑道:中断起飞可用距离(L中可)与继续起飞可用距离(L继可) 相等的跑道。
22022.10/1.200/12032005-3-7
2
飞机从地面开始加速滑跑到飞机离地高度不低于1500英尺, 完成从起飞到航路爬升构型的转换,速度不低于1.25VS, 爬升梯度达到规定值的过程叫做起飞。
起飞航迹由起飞场道和起飞航道两个部分构成。
22022.10/1.200/12032005-3-7
● 要求 (1)VR≥1.05VMCA
(2)VR的大小必须保证飞机在离地35英尺高度上飞行 速度不小于起飞安全速度(V2)。 (3)保证在VR上以最大允许的抬头率 抬前轮时,VLOF≮1.1 VMU (全发) 或1.05 VMU (单发)。
22022.10/1.200/12032005-3-7
7
5 起飞决断速度(V1) 飞机在该速度上被判定关键发动机停车等故障时,飞行员可
第二部分第二章飞机飞行中的主要载荷及过载案例

第二部分第二章飞机飞行中的主要载荷及过载案例飞机在飞行过程中承载了各种主要载荷,包括重力载荷、升力载荷、推力载荷、阻力载荷和惯性载荷。
这些载荷对飞机的结构和性能都有着重要影响。
同时,由于各种原因,飞机在飞行过程中可能会遭受过载,即超过了设计载荷的力的作用。
下面将分别介绍飞机飞行中的主要载荷和一些过载案例。
1.重力载荷:重力是指地球对飞机的作用力。
重力载荷主要通过机身结构承受,并从机身传递到翼面和机翼。
当飞机升空时,由于重力的作用,机翼需要产生升力来平衡重力。
重力载荷的大小与飞机的质量相关。
2.升力载荷:升力是指飞机在空中飞行时产生的垂直向上的力。
升力载荷主要通过机翼承载,并从机翼传递到机身结构。
升力的大小与飞机的速度、密度和机翼的形状等因素有关。
3.推力载荷:推力是指飞机发动机产生的向前的力。
推力载荷主要通过发动机座舱和机身传递到起落架和机翼。
推力的大小与发动机的功率相关。
4.阻力载荷:阻力是指飞机在飞行中受到的空气阻力。
阻力载荷主要通过机翼、机身和机尾传递到飞机结构。
阻力的大小与飞机的速度、气动外形和空气密度等因素有关。
阻力产生的载荷会导致飞机的速度下降或者加速度增加,从而加大其他载荷的作用。
5.惯性载荷:惯性载荷是指飞机在运动过程中由于加速度变化而产生的力。
惯性载荷主要通过飞机结构承受。
当飞机进行加速、减速、转弯和爬升等操作时,惯性力会对飞机产生作用,对飞机结构造成影响。
在飞行中,由于各种原因,飞机可能会遭遇过载,即承受超过设计载荷的力。
这种过载可能会导致飞机结构的损坏或破坏,从而造成事故。
以下是一些过载案例:1.气象引起的过载:飞机在恶劣气象条件下飞行,比如强风、大雨、雷暴等,可能会遭遇突然的气流变化,导致飞机遭受过载。
例如,飞机在下降过程中遭遇下行气流,可能会急剧下降并承受过大的载荷。
2.操纵失误引起的过载:飞行员在操纵飞机时的失误可能导致过载。
例如,飞行员在起降或者急转弯时过度操作飞机,导致飞机承受过大的载荷。
民航概论课件第二章民用航空器之飞行性能

Payload
Payload
Allowed payload Range
Range
平衡
平衡
Forward limit
CG
Aft limit
manoeuvrability
stability mg
平 衡
Weight (kg) 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000 11000 12000 13000 14000 15000 16000 17000 18000 FULL
第二章 民用航空器
第七节 飞行性能
起 飞 速 度
着陆
VREF 50 ft
VREF 1,23 VSR VMCL
Means of braking :
wheel brakes Spoilers Reverses
braking
V=0
LD
飞行剖面与油量
En route reserபைடு நூலகம்e
Taxi fuel
Payload
Range
最大业载的计算
• Payload ≤ (MTOW - dow - AF - HF) - (TF + RR) • Payload ≤ (MLW - dow - AF - HF) - RR • Payload ≤ (MZFW - dow)
Payload
Range
最大业载的计算
– Cabin capacity – Cargo capacity – Tanks capacity
最大业载的计算
• tow = dow + payload + fuel ≤ MTOW • lw = dow + payload + fuel - trip fuel ≤ MLW • zfw = dow + payload ≤ MZFW • trip fuel + reserves + taxi fuel ≤ Tanks capacity
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
V2min≮ 1.2 VS (全发)或 1.15 VS (单发) V2min≥1.1VMCA
飞机的速度达到V2min能保证其具有足够的上升梯度。
第二章 第 21 页
8. 起飞安全速度(V2)
Takeoff Safety Speed
V2是飞机起飞上升至35ft应该达到的速度。 只要飞机的速度达到V2,飞机的上升梯度就能达到相 关要求。
第二章 第 22 页
8. 起飞安全速度(V2)
Takeoff Safety Speed
● 要求
(1) V2min V2min≮ 1.2 VS 或 1.15 VS V2min≥1.1VMCA
(2) VR加上达到高于起飞表面35英尺前所获得的速度增量。
V2取(1)和(2)的大者。
第二章 第 23 页
2.1.2 净空道和安全道
500 ft min
1.25 % max
CLEARWAY
2. 净空道
使用净空道可以提高飞机的起飞性能。
ok not ok (26’ max)
500 ft min
1.25 % max
涡轮发动机飞机的起飞场道阶段必须要达到35英尺 高,并且速度至少达到V2 。飞机离地后爬升到35英尺高 度可以在净空道内完成。
第二章 第 46 页
6. 全发起飞滑跑距离(全发起飞滑跑所需距离)
对于有净空道的情况,还应考虑:
全发起飞滑跑距离 :飞机从地面开始加速滑跑到起 飞空中段的中点所经过的水平距离的1.15倍。
V2+ΔV
V=0
VR VLOF
滑跑距离
35ft 空中距离
0.5L空中 L
全发起飞滑跑距离
15%L
第二章 第 47 页
2.2.1 全发起飞过程简介
第二章 第 30 页
2.2.2 全发起飞性能
1. 全发起飞#43;ΔV 35ft
全发起飞滑跑距离
起飞空中段
2. 全发起飞空中段距离
第二章 第 31 页
3. 全发起飞距离
全发起飞演示距离=起飞滑跑距离+起飞空中距离
V2+ΔV
V=0
VR VLOF
要求: 任何情况下,所需距离 可用距离
即全发起飞应满足: 1. 全发起飞距离(所需距离) 全发起飞可用距离
2. 全发起飞滑跑距离(所需距离) 全发起飞可用滑跑距离
注:不计净空道时,1满足则2必然满足,计入净空道时, 须同时满足。
第二章 第 48 页
2.3 起飞过程中一台发动机停车 的起飞性能
The Calculation of Runway Slope
Difference in threshold elevations TORA × 3.28
× 100 %
第二章 第 37 页
Takeoff performance changes
Takeoff distance changes A runway that slopes uphill will increase the takeoff distance for an airplane and a downslope will decrease it.
Minimum Control Speed, Airborne (known as VMC)
5 ° max
飞行中如关键发动机在该速度上突然停车,使用 正常的操纵技能,能保持向工作发动机一侧的坡度 不大于5度的直线飞行,为维持操纵所需的方向舵脚 蹬力不超过150磅的最小飞行速度。
第二章 第 10 页
2. 空中最小操纵速度(VMCA)
Minimum Control Speed, Airborne (known as VMC)
第二章 第 11 页
VMCA≤1.2VS(相应构型)
法规规定:
第二章 第 12 页
2. 空中最小操纵速度(VMCA)
Minimum Control Speed, Airborne (known as VMC)
Rotation Speed
起飞滑跑中,飞行员开始拉杆抬前轮以增大飞机 的俯仰角时的速度。
● 要求
(1) VR≥1.05VMCA
保证飞机离地后一发失效的情况下能直线上升;
保证VMU >VMCA (2) VR的大小必须保证飞机在离地35英尺高度上飞行速度 不小于起飞安全速度(V2)。
(3) 保证在VR上以最大允许的抬头率抬前轮时,VLOF≮1.1 VMU (全发)或1.05 VMU (单发)。
• 预滑段说明
180度转弯的 预滑段(四发)
第二章 第 44 页
• 不同型号飞机的预滑段长度
第二章 第 45 页
6. FAR全发起飞距离(全发起飞所需距离)
全发起飞距离 =1.15×全发起飞演示距离
V2+ΔV
V=0
VR VLOF
35ft
滑跑距离
空中距离
演示起飞距离
全发起飞距离
15%演示 起飞距离
第二章 起飞性能
飞行性能与计划
Contents
本章主要内容
2.1 基本概念 2.2 全发起飞 2.3 起飞过程中一台发动机停车的起飞性能 2.4 限制最大起飞重量的因素 2.5 起飞性能优化 2.6 飞机在污染道面上的起飞性能
第二章 第 2 页
运输类飞机起飞的定义:
飞机从地面开始加速滑跑到飞机离地高度不低于 1500英尺,完成从起飞到航路爬升构型的转换,速度不 低于1.25VS,爬升梯度达到规定值的过程叫做起飞。
3. 安全道 (停止道)
安全道是指起飞跑道以外的宽度不小于跑道的宽度, 并以跑道中心线的延长线为中心线,其强度足以承受 飞机重量而不致造成飞机结构破坏,被机场当局指定 可用于中断起飞时飞机减速的一个区域。
使用安全道可以提高飞机的起飞性能。
第二章 第 28 页
STOPWAY
2.2 全发起飞
飞行性能与计划
第二章 第 17 页
5. 起飞决断速度(V1)
Takeoff Decision Speed
飞机在该速度上被判定关键发动机停车等故障时,飞 行员可以安全地继续起飞或中断起飞,中断起飞的距离 和继续起飞的距离都不会超过可用的起飞距离。
V1是采取第一项制动措施的最迟时机,而不是做决策 的速度,也不是识别速度。
第二章 第 38 页
Takeoff performance changes
Takeoff distance changes
根据具体情况和图表来选择最优襟翼角度 襟翼角度小,滑跑距离长,上升梯度大,空中距离短 襟翼角度大,滑跑距离短,上升梯度小,空中距离长
第二章 第 39 页
5. 全发起飞可用距离和滑跑可用距离
FAR要求在计算地面性能(包括演示距离和FAR起飞距离) 时,要以保守的观点进行风修正,即用修正风逆风分量的50% 或顺风分量的150%来计算起飞和着陆性能。手册中的图表都是 按照这个要求来制定的。
第二章 第 34 页
Takeoff performance changes
Takeoff distance changes The effect of weight changes on takeoff distance.
第二章 第 18 页
5. 起飞决断速度(V1)
Takeoff Decision Speed
● 要求
(1) V1≥ V1(MCG) V1(MCG)=VMCG+△v 保证方向
(2) V1≤VR 保证起飞
(3) V1≤VMBE 保证刹车
△v:
飞行员判断发动机停 车并采取相应措施这 段时间飞机的速度增 量。
全发起飞可用滑跑距离﹦跑道长度﹣预滑段 全发起飞可用距离﹦跑道长度﹢可用净空道长度﹣预滑段
预滑段
第二章 第 40 页
5. 全发起飞可用距离和滑跑可用距离
预滑段
第二章 第 41 页
• 预滑段说明
90度转弯的预 滑段
第二章 第 42 页
• 预滑段说明
180度转弯的 预滑段(双发)
第二章 第 43 页
第二章 第 19 页
6. 离地速度(VLOF)
Takeoff Decision Speed
VLOF
2W
CLLOF S
飞机起飞滑跑中,当加速到升力等于重力这一瞬
间的速度。
第二章 第 20 页
7. 起飞最小安全速度(V2min)
Minimal Takeoff Safety Speed
For runway width < 40 m, VMCG must be increased by 2.5 kt.
The pilot’s action : recover control of the aircraft enable safe take off continuation
第二章 第 8 页
35ft
全发起飞滑跑距离
起飞空中段
图 2-4 全发起飞演示距离
第二章 第 32 页
4.影响全发起 飞距离的因素
1) 风 2) 飞机重量 3) 气温与标高 4) 跑道坡度 5) 飞机襟翼
第二章 第 33 页
Takeoff distance changes A headwind will decrease it and a tailwind will increase it.
×
中断起飞性能
继续起飞性能
飞行性能与计划
2.3.1 中断起飞(RTO - Rejected Take Off)
中断起飞过程简介(三个阶段) 起飞过程中,必须考虑关键发动机停车的情况。飞机由速度 为0全发加速至某速度时,关键发动机停车,飞行员识别判 断后,若当前速度小于决断速度V1,则进行制动措施,最后 将飞机在跑道上全停的过程。 分为全发加速段,过渡段,制动段