2起飞性能下
飞机起飞性能算法
飞机起飞性能算法郑峰敏【摘要】根据两点起飞和三点起飞不同的飞行原理和运动特点,分别建立两种不同起飞方式下的数学仿真模型.重点结合飞机的气动特性和起落架系统特性,依据全机总体设计参数进行仿真计算,给出不同起飞方式下的性能数据.以某型飞机为例,编写起飞性能程序,计算两种不同起飞方式下飞机的起飞性能.最后分析了2种不同的起飞方式对飞机各起飞阶段下的距离和速度等性能数据的影响,结合飞机实际飞行,验证仿真模型的准确性,并给出较优的起飞方式,用于指导部队飞行.【期刊名称】《空军工程大学学报(自然科学版)》【年(卷),期】2019(020)003【总页数】4页(P29-32)【关键词】两点起飞;三点起飞;起飞性能【作者】郑峰敏【作者单位】航空工业西安飞机工业(集团)有限责任公司,西安,710089【正文语种】中文【中图分类】V212.1在飞机飞行性能研究中,起飞只占一次飞行任务时间的1%~2%,却是飞行任务中十分重要的阶段,是飞机从地面滑跑状态转变为空中飞行状态的一个复杂过程[1]。
起飞性能与其起飞方式息息相关,现阶段大多数飞机的起飞方式不尽相同[2],有两点起飞,也有三点起飞,主要取决于飞行员的飞行习惯,以及飞机自身的状态和特征[2]。
简单来说,两点起飞时飞机较平稳,而三点起飞时,由于前轮的摆动,不如两点平稳,但比较容易操作。
本文正是从2种不同的起飞方式出发,探索飞机的起飞性能是如何变化的,哪种起飞方式下性能更优。
1 飞机起飞过程1.1 三点起飞起飞是指飞机在其专用跑道上从静止状态加速离地,并在空中加速上升到安全高度的整个运动过程[1]。
飞机三点起飞可简化为3个阶段:地面三点滑跑阶段,抬前轮到离地两点滑跑阶段,离地后到安全高度阶段。
三点起飞是以抬前轮速度VR以及安全爬升速度V2为飞行判断依据,判断飞机是否能安全起飞。
所有阶段均需满足GJB 34A—2012有人驾驶飞机(固定翼)飞行性能。
1.2 两点起飞过程两点起飞认为在整个地面滑跑过程中,三点着地只占一小部分,有很大一段都是以两个主轮着地滑跑。
2.起飞性能

起飞平衡距离和平衡速度
中断起飞所需距离与继续起飞所需距离曲线的交点对应的速度为平衡速度, 对应的距离为平 衡(所需)距离。此速度下中断起飞距离与继续起飞距离相等(所需) 。 重量越大,平衡速度越大。
起飞决断速度和选择和跑道限制的最大起飞重量
平衡场地法 中断起飞可用距离与继续起飞可用距离相等的跑道称为平衡跑道(可用) 。 飞机以不同重量起飞示意图 P37 起飞重量应小于跑道限重 继续起飞最小速度<中断起飞最大速度 平衡速度=V1 当起飞重量等于跑道限重时,平衡速度无容错。 图表 1:平衡跑道长度限制最大起飞重量;确定 V1/VR/V2 P39,40
减功率减推力起飞
减功率起飞(降级模式,未运行时可调节) 1.减功率起飞没有运行限制,只要飞机性能允许(实际起飞重量小于 MTOW) ,任何情况均 可使用。 2.只能使用降低了的最大功率。 3.有一组起飞性能表,每一种飞机与发动机的组合都有一张起飞性能表。 4.没有额外的安全裕度。 5.特定情况下可提高跑道限重(场长限制) (短跑道、湿、污染道面) 。 V(MCG)限制更晚。 6.运行状态中功率不可调。 7.减功率起飞导致较小的 V(MCG) 。
起飞性能
飞机从地面开始加速滑跑到飞机离地高度不低于 1500ft,完成从起飞到航路爬升构型的转 换,速度不小于 1.25Vs(当前构型失速速度) ,爬升梯度达到规定值的过程叫做起飞。
起飞过程中涉及到的速度
起飞前机组必须得到起飞决断速度 V1、起飞抬前轮速度 V(R) 、起飞安全速度 V2(离地 35ft) 。 起飞决断速度 V1 用于中断起飞的最大速度;用于继续起飞的最小速度。 采取第一项制动措施的最迟时机,不是作决策速度,也不是识别速度。
V1( MCG) VMCG V V1 V1( MCG)是V1的最小值
飞行性能 起飞性能
2.地面最小操纵速度VMCG
-增速
襟翼收上
-按襟翼/速度标牌将襟翼收起
-调定最大连续推力
直线平飞
用襟翼收上速度爬 高到障碍许可高度
限制坡度在15°直至 达到襟翼收上速度 +20kt
立即转弯保持: -起飞襟翼调定 V2(最大坡度 15°)~V2+10 (减小爬高梯度)
-增速 -按襟翼/速度标牌 收襟翼
收襟翼高度
-在80n miles 调定
全部发动机工作正常起飞(全发起飞) 一台发动机失效后继续起飞 一台发动机失效后中断起飞
第2章 第 6 页
本章主要内容
第2章 第 7 页
2.1 基本概念 2.2 全发起飞 2.3 起飞过程中一台发动机停车的起飞性能 2.4 限制最大起飞重量的因素 2.5 起飞性能的优化 2.6 飞机在污染道面上的起飞性能
第2章 第 12 页
CCAR25.149 空中最小操纵速度
(b)VMC,空中最小操纵速度 VMC是校正空速,在该速度,当临 界发动机突然停车时,能在该发动机继续停车情况下保持对飞机的 操纵,并维持坡度不大于5°的直线飞行。 (c)在下列条件下,VMC不得超过1.2VS:
……
((d68)公在斤速;度15V0磅M)C,,为也维不持得操要纵求所减需少的工方作向发舵动脚机蹬的力功不率得(超推过力6)67,牛 在纠偏过程中,为防止航向改变超过20°,飞机不得出现任何危险的 姿态,或要求特殊的驾驶技巧、机敏或体力。
飞行性能与计划/CAFUC
2.1 基本概念
第2章 第 8 页
2.1.1 起飞过程中涉及到的几个速度
空中最小操纵速度VMCA(Minimum Control Speed Airborne) 地面最小操纵速度VMCG(Minimum Control Speed Ground) 发动机故障速度VEF(Engine Failure Speed) 最大刹车能量速度VMBE (Maximum Brake Energy Speed) 最小离地速度VMU(Minimum Unstick Speed) 抬前轮速度VR(Rotation Speed) 起飞决断速度V1(Take-off Decision Speed) 离地速度VLOF (Lift-off Speed) 起飞安全速度V2(Take-off Climb Speed)
飞机性能 爬升和下降
W V dV sinθ g dH
sinθ = FN − D
W
1+
V g
dV dH
§1 爬升性能 1、爬升参数的计算
爬升梯度与爬升率:
tanθ ≈ sinθ =FN − D
飞机重量
W
1+
V g
dV dH
= R C V= sinθ
飞机重量
(FN − D)V
W
1+
§1 爬升性能 3、常用的爬升速度
转换高度:
只与表速和马赫数有关,与温 度无关,与机型无关。
在低于转换高度时:加速爬升 过程。加速因子大于零;
在 高 于 转 换 高 度 , 低 于 11000 米时:减速爬升过程。加速因子 小于零;
在 高 于 11000 米 时 : 等 速 爬 升 过程。加速因子等于零;
•爬升航段燃油最省的爬升方式:从起飞离地 到公共点的燃油最省。
•爬升航段成本最低的爬升方式:从起飞离地 到公共点的直接运营成本最低,又称经济爬升 方式。
•减推力爬升方式:
§1 爬升性能 4、爬升性能计算(图表使用)
图 册 : P82 、 P83 、 P84 ; P79 、 P80、P81
给定机型、起飞重量、爬升速度, 可查出从海平面爬升到任一高度时 所需时间、水平距离、燃油消耗和 真空速。
爬升梯度与爬升率:
α θγ
θ γ
θ
γ= θ +α
§1 爬升性能 1、爬升参数的计算
爬升梯度与爬升率:
L + FN
sin α
−W
cosθ
= W dθ V g dt
1
FN
cosα
起飞性能
起飞性能优化作者: 刘浪指导教师:刘晓明论文摘要:客货运输任务的民用飞机,其起飞性能对飞行安全和经济性两方面都有较大的影响,是飞机飞行性能的一个重要组成部分。
起飞过程受到的约束限制和影响因素很多,如机场场地长度、爬升梯度、超越障碍物、轮胎速度、刹车能量、起飞速度和结构强度等方面,以及飞机、机场和气象等方面的因素的影响。
这些都有可能限制飞机的最大起飞重量,从而限制飞机装载客、货的能力,降低经济性。
在上述诸多影响起飞性能的因素中,其中机场场地长度和起飞第二爬升段爬升梯度对最大起飞重量的限制最为明显。
为了优化飞机的起飞性能,提高飞机运营的经济性,本文将从如何增加最大起飞重量和减推力(减功率)起飞两方面进行分析,从而给出最经济的,最优化的起飞参数。
关键词:起飞性能减功率假设温度中断起飞距离继续起飞距离The Improvement of Taking-offPerformanceAuthor: Liu Lang Instructor: Liu XiaomingAbstract:For civil planes, which are used for the transportation of execution passengers and cargo's assignment, their take-off performances have influences in two aspects: flight safety and economy, and are very important in aircraft performances. There are many restrictions and influences in the course of taking off, such as the length of runway, step of climbing, etc. All these above may lead to fewer passengers and less cargos, and surely will lower the economic income.In order to optimize the take-off performance of aircrafts, raise the economy income, this text will follow how to decrease the thrust and increase the biggest maximum weight of departure, thus to show the most economical, the parameter take-off of optimization, and improve the take-off performance.Key Words:Take-off performance; the reduce power; ATM; Break off take-off distance; Continue take-off distance引言随着国际航空业的飞速发展,降低成本,提高效益已经日益被各国航空企业所关注。
第4章起飞性能

第4章起飞性能第一节起飞性能的限制一、速度的定义V mJ M m最大操作限制速度,是在任何飞行阶段(爬升、巡航或下降)都不能故意超过的速度。
V mcg地面最小控制速度,是起飞滑跑时的校准空速,在这个速度时,当关键发动机突然不工作时,仅靠主要空气动力控制就可以对飞机保持控制(不用前轮转弯),使用正常驾驶技术就可以安全起飞。
V mc空中最小操纵速度,是校准空速,在这个速度时,当一台关键发动机突然不工作时,在该发动机保持不工作的状态,仍能够保持飞机的控制,并且可以利用不大于5度的坡度角保持飞机平直飞行。
V mcl进近和着陆的最小控制速度,是校准空速,在这个速度时,当关键发动机突然不工作时,仍可以利用工作的发动机对飞机保持控制,并且可以以不大于5度的坡度角保持飞机的平直飞行。
V mu最小不擦尾速度/最小离地速度,是校准空速,当等于或高于它时,飞机可以安全离开地面并继续起飞。
V s是校准的失速速度,是以海里/小时为单位的最小稳定飞行速度,在这个速度上,在失速速度时零推力或发动机在慢车时,飞机可以控制。
V EF发动机故障速度,是校准空速,假定关键发动机发生故障时的速度。
V i行动速度,是校准空速,是机组能够决定并作出减速动作,使飞机中断起飞的最大速度,并且可以保证将飞机停在跑道的限制范围内。
“ JAR/FAR 25.107(a)(2) V1 ,由校准空速表示,由申请人选择;不过,V1不得小于VEF加上在加速--停止实验中,从关键发动机故障发生开始到飞行员发现故障并开始采取第一个措施动作(例如:刹车、收油门、放减速板)期间的速度增加值”。
V R抬前轮速度,是飞行员开始抬前轮的速度,正常抬轮速率约为3° /秒。
V LO离地速度,是指飞机主轮离地时的校准空速。
V2起飞安全速度,是在发动机发生故障时,在高出跑道表面35英尺处必须达到的最小速度。
V MB刹车能量限制速度,由于能量守恒,在中断起飞时,刹车必须吸收对应的飞机动能,并将其转化为热能。
浅谈侧风对飞机起飞着陆的影响及修正原理

浅谈侧风对飞机起飞着陆的影响及修正原理
侧风是指在飞机起飞和着陆过程中,气流方向与飞机前进方向不一致的风。
侧风对飞
机的起飞和着陆有着重要的影响,它会导致飞机偏离理想的飞行航线,增加了飞行员的操
作难度,甚至可能造成飞机失控。
飞行员和飞行员需要对侧风的影响有充分的了解,并采
取相应的修正措施,确保飞机安全起飞和着陆。
侧风对飞机的影响主要体现在以下几个方面:
1. 飞机姿态变化:当飞机受到侧风的影响时,飞机的姿态会发生变化,可能会出现
偏航、滚转等情况。
这种姿态变化会影响飞机的飞行稳定性,增加飞行员的操纵难度。
2. 着陆路径偏移:侧风会使飞机的着陆路径偏离预定的着陆轨迹,增加了飞机着陆
时的风险。
特别是当侧风较大时,飞机容易出现侧滑或漂移,导致着陆过程不稳定。
3. 起飞性能下降:受到侧风的影响,飞机的起飞性能也会受到一定影响,需要飞行
员采取相应的措施来确保起飞的安全和稳定。
为了应对侧风对飞机起飞和着陆的影响,航空界常用的修正原理包括以下几个方面:
1. 飞行技术修正:飞行员需要通过掌握一定的飞行技术,对受到侧风影响时的飞行
姿态进行及时和准确的调整,保持飞机的稳定和安全。
这包括对飞机姿态、油门、方向舵、副翼和升降舵等飞行控制面进行正确的操纵。
2. 飞行计划调整:在面对强烈侧风情况下,飞行员还可以通过调整飞行计划,选择
适合的起飞和着陆方向,避免直接受到侧风的影响,确保飞行的安全和顺利进行。
3. 飞机设计改进:飞机制造商也可以通过对飞机的设计进行改进,增加一些特殊的
飞行控制和辅助系统,以提高飞机在侧风情况下的飞行性能和安全性。
第四章_飞机性能工程_起飞性能讲义_-_A

起 飞 性 能 Takeoff Performance
干跑道起飞距离(TOD干):
MAX(全发起飞距离的115%倍,一发停车继续起飞距离) 它应小于可用起飞距离(TODA)
Page 24
飞机性能工程
起 飞 性 能 Takeoff Performance
Page 25
飞机性能工程
§1 起飞简介
39
飞机性能工程 §1 起飞简介
4、起飞速度 V1
起 飞 性 能 Takeoff Performance
1 Second
Vef
V1
• V1 is the latest point in the takeoff roll where a stop can be initiated.
35 ft
干跑道上的加速停止距离(ASD干)
MAX(全发加速停止距离;一发停车加速停止距离)。 它应小于可用加速停止距离(ASDA)
湿跑道上的加速停止距离(ASD湿)
Page 28
飞机性能工程
起 飞 性 能 Takeoff Performance
Page 29
飞机性能工程
起 飞 性 能 Takeoff Performance
manual braking at V1 along with speed brake extension and throttle chop, the airplane will come to a stop at the end of the runway.
Page 38
飞机性能工程 §1 起飞简介
§1 起飞简介
1、起飞航迹
从起飞静止点开始到高于地面1500ft,或完成从起飞构型到 航路爬升构型的转变并达到规定速度。
起飞性能影响因素.pptx

离地姿态大,离地速度小,起飞滑跑距离短,但升空后安全裕度小, 还可导致擦机尾。
2
● 起飞重量
重量越大,加速度越小,起飞滑跑距离和起飞距离都要增加,起飞后 的上升梯度小,越障能力差。
3
● 襟翼位置
放下大角度襟翼,可增大升力系数,减小离地速度,缩短起飞滑跑距 离;但放下大角度襟翼,升阻比降低,飞机升空后上升梯度小,增速慢, 飞机到达安全高度的空中距离增长,越障能力变差。正常起飞时应使用 规定角度襟翼起飞。
9
飞机机电设备维修专业教学资源库
Aircraft Maintenance Engineering Teaching Resource Library
版权所有 谢谢
பைடு நூலகம்
反之,跑道表面粗糙不平或 松软,起飞滑跑距离就长。
6
● 风向风速
保持表速一定,逆风滑跑,离地地速小,所以起飞滑跑距离和起飞距离 比无风或顺风时短。
7
● 跑道坡度
上坡起飞,重力的第二分量会减小飞机的加速力,飞机的起飞滑跑距离 和起飞距离会增加,下坡反之。
8
● 影响因素小结
为缩短起飞滑跑距离和起飞距离,飞行员应使用最大油门,放下 一定角度襟翼,朝着逆风方向起飞。情况许可时,适当减轻重量或利用 下坡起飞,可进一步缩短起飞滑跑距离和起飞距离。
飞机机电设备维修专业教学资源库
Aircraft Maintenance Engineering Teaching Resource Library
起飞性能影响因素
5、影响起飞滑跑距离和起飞距离的因素
影响因素一般都是通过影响离地速度或起飞滑跑的平均加速度来影响 起飞滑跑距离的。
●油门位置
油门大,拉力大,飞机加速快,起飞滑跑距离和起飞距离就短。一般 使用最大油门状态起飞。
起飞性能表1

2nd seg.
Obstacles 70 t
固定的 V1 , 限制取决于 V2.
V2 / VS
起飞限制
MTOW
空中限制
V2 / VS
100 t
MTOW
FTO
第二阶段限制的例子 :
V2的增加使得 : 对于固定的梯度有一个更佳TOW .
–
1st seg.
2nd seg.
Obstacles 70 t
滑跑 :
轮胎速度 (5) 刹车能量 (6) Vmu(9)
第一阶段 (1) 第二阶段 (2) 起飞最后阶段(加速阶段) (8) 障碍物 (4)
•最大起飞重量(7)
起飞限制
跑道限制
• 起飞距离
记住:
对于同一重量 增加 V1 / VR TODOEI :降低(减少)
起飞限制
跑道限制
TOD OEI 60 t
V1 / VR
起飞限制
跑道限制
• 起飞滑跑
曲线的变化与 TOD曲线相似.
MTOW
TOR AEO 80 t TOD AEO
TOR OEI TOD OEI 60 t
V1 / VR
起飞限制
跑道限制
• 起飞滑跑
曲线的变化与 TOD曲线相似. • 加速停止距离 增加 V1 / VR
MTOW
100 t FTO
随着 V1 / VR 的不同:
固定的 V2 ( VR ), 它独立于
V1 / VR .
1st seg.
随着 V2 / VS 的不同:
2nd seg.
Obstacles 70 t
固定的 V1 , 限制取决于 V2.
飞机起降性能分析方法1起飞性能
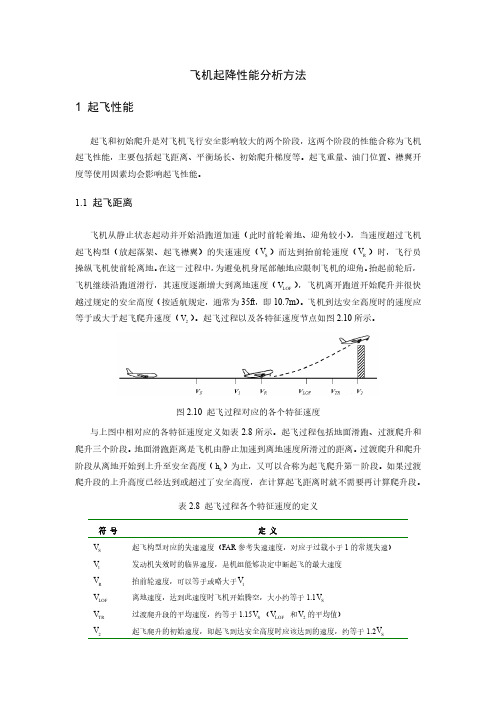
表 2.9 不同类型起飞跑道的滚动摩擦系数
铺砌的跑道
0.02
硬草皮/沙砾
0.04
短干草皮
0.05
长草地
0.10
软地
0.10 ~ 30
飞机在过渡爬升阶段由VLOF 加速到起飞爬升速度V2 并上升一定高度,这一阶段的航迹近
似于一段圆弧线,其半径可以表示为:r VT2R / g n 1 。式中,n 为起飞过渡爬升段的过载,
t VLOF V1 / a
(2.79a)
Sop
V1
t
1 2
a t 2
(2.79b)
在发动机失效时,如果飞行员决策停止起飞,则停止段是一个带刹车的减速过程,直到
飞机的速度为零时结束。此时的发动机油门为零或为慢车状态,扰流板打开( CL 为零)。这 一段距离的计算方法与着陆滑跑段距离的计算方法相同,从速度V1 开始刹车减速直到停止的 滑跑距离如下式所示[73]:
典型进场航迹角为 3°(约为 0.0524 rad); r 为拉平机动段的半径;VF 为拉平速度,可以表
示为VF VA VTD / 2 (即1.225VS ); n 为拉平机动段的过载,典型值取为 1.2。进场和拉平
阶段的水平飞行距离可以分别由下列两式计算:
SA
hS hF tan A
(2.83a)
1 起飞性能
飞机起降性能分析方法
起飞和初始爬升是对飞机飞行安全影响较大的两个阶段,这两个阶段的性能合称为飞机 起飞性能,主要包括起飞距离、平衡场长、初始爬升梯度等。起飞重量、油门位置、襟翼开 度等使用因素均会影响起飞性能。
1.1 起飞距离
飞机从静止状态起动并开始沿跑道加速(此时前轮着地、迎角较小),当速度超过飞机 起飞构型(放起落架、起飞襟翼)的失速速度(VS )而达到抬前轮速度(VR )时,飞行员 操纵飞机使前轮离地。在这一过程中,为避免机身尾部触地应限制飞机的迎角。抬起前轮后, 飞机继续沿跑道滑行,其速度逐渐增大到离地速度(VLOF ),飞机离开跑道开始爬升并很快 越过规定的安全高度(按适航规定,通常为 35ft,即 10.7m)。飞机到达安全高度时的速度应 等于或大于起飞爬升速度(V2 )。起飞过程以及各特征速度节点如图 2.10 所示。
第二讲飞机的基本飞行性能讲义

第二讲飞机的基本飞行性能讲义一、引言飞机的基本飞行性能是指飞机在不同飞行阶段中的各种性能指标。
了解和掌握飞机的基本飞行性能对于飞行员和飞机设计师来说都是十分重要的。
本讲义将介绍飞机的基本飞行性能指标及其计算方法。
二、起飞性能起飞性能是飞机在地面开始起飞到到达安全飞行高度之间的性能指标。
主要包括起飞距离、起飞速度和最大爬升率。
1. 起飞距离起飞距离是指飞机从起飞开始到离地面50英尺高时所需的距离。
起飞距离计算公式如下:起飞距离 = 加速距离 + 抬轮距离 + 离地距离其中,加速距离是指飞机从静止到达起飞速度所需的距离;抬轮距离是指飞机从离地面50英尺高到离地面100英尺高所需的距离;离地距离是指飞机离开地面100英尺高时所需的距离。
2. 起飞速度起飞速度是指飞机在起飞时所需的最低速度。
起飞速度取决于飞机的重量和机翼的亮度。
一般来说,起飞速度随飞机重量的增加而增加,随机翼的亮度的增加而减小。
3. 最大爬升率最大爬升率是指飞机在起飞过程中爬升的最大速率。
最大爬升率取决于飞机的发动机推力、机翼提供的升力和飞机的阻力。
飞机的最大爬升率在不同高度下可能会有所不同。
三、巡航性能巡航性能是指飞机在巡航飞行阶段的性能指标。
主要包括巡航速度、巡航升力系数和巡航推力。
1. 巡航速度巡航速度是指飞机在巡航飞行阶段所保持的恒定速度。
巡航速度取决于飞机的气动性能和发动机的推力。
为了保持较低的燃料消耗和较长的航程,飞机会选择一个较低的巡航速度。
2. 巡航升力系数巡航升力系数是指飞机在巡航飞行阶段的升力与机翼面积、空气密度和飞机速度的比值。
巡航升力系数影响飞机的升力和阻力。
3. 巡航推力巡航推力是指飞机在巡航飞行阶段的发动机推力。
巡航推力决定飞机的速度和燃料消耗。
四、下降和着陆性能下降和着陆性能是指飞机从巡航飞行阶段到着陆的过程中的性能指标。
主要包括下降速度、下降距离和着陆距离。
1. 下降速度下降速度是指飞机从巡航飞行阶段开始向地面下降时的速度。
飞行器的飞行性能与操纵性

飞行器的飞行性能与操纵性飞行器是一种能够在空中飞行的机械装置,广泛应用于航空领域。
飞行器的飞行性能和操纵性是评价其飞行能力的重要指标。
本文将就飞行器的飞行性能和操纵性进行探讨。
一、飞行性能飞行性能是指飞行器在飞行过程中表现出来的各项能力和特点。
主要包括以下几个方面。
1.1 起飞性能起飞性能是指飞行器从地面起飞到升空的过程中,所需要的时间和能量消耗等指标。
一个优秀的飞行器应该具备良好的起飞性能,以确保飞机能够迅速离地并进入到安全高度。
1.2 巡航性能巡航性能是指飞行器在飞行过程中的巡航阶段表现出的能力。
包括飞行速度、飞行高度和航程等指标。
飞行速度是衡量飞行器性能的重要参考,高速飞行可以显著减少飞行时间。
同时,飞行高度与航程也是考虑因素,适当的高度和较长的航程可提供更广阔的应用范围。
1.3 爬升性能爬升性能是指飞行器在从巡航阶段爬升到更高的高度时所表现出的能力。
这是一项重要的飞行性能指标,与飞机的引擎功率、重量、气压等因素息息相关。
较好的爬升性能能够使飞行器在短时间内迅速攀升到所需高度。
1.4 下降和着陆性能下降和着陆性能是指飞行器在从巡航阶段下降到降落时的表现能力。
该性能主要与飞机的机翼、起落架以及飞行员的技术水平等相关。
良好的下降和着陆性能能够保证飞机平稳降落,确保安全性和舒适性。
二、操纵性操纵性是指飞行器在操纵员的操作下,对飞行控制的响应能力。
一个操纵性良好的飞行器应具备以下几个特点。
2.1 稳定性稳定性是评价飞行器操纵性能好坏的重要指标之一。
指的是飞行器在受到扰动时,能够自动或者经过飞行员的操纵,迅速恢复到稳定状态。
较好的稳定性能够提高乘客的舒适度和飞行安全。
2.2 敏捷性敏捷性是指飞行器在操纵员的操作下,对操纵指令的快速响应能力。
敏捷性好的飞行器能够迅速、精确地完成飞行任务,提高飞行效率和准确性。
2.3 操纵灵活性操纵灵活性是指飞行员能够轻松地操作飞行器,实现精细的操纵动作。
这与飞行器的机械设计、操纵装置的灵活性等相关。
飞机起飞性能和安全性评估方案

飞机起飞性能和安全性评估方案随着航空业的迅速发展,飞机起飞性能和安全性评估成为了必不可少的步骤。
飞机的起飞性能和安全性直接影响着飞行的质量和安全,因此对其进行全面和准确的评估非常重要。
本文将介绍飞机起飞性能和安全性评估的方案。
一、起飞性能评估起飞性能评估是指对飞机在起飞阶段的性能进行分析和评估。
这涉及到机翼的升力、推力、阻力、重量等因素。
评估飞机的起飞性能可以帮助确定起飞速度、滑跑距离和爬升性能等参数,从而确保飞机在起飞阶段的安全和效率。
起飞性能评估通常包括以下步骤:1. 数据收集和分析:收集相关的飞机设计数据、气象数据和机场参数等,进行数据的整理和分析。
这包括飞机的重量、惯性矩阵、飞行包线和最大起飞推力等。
2. 性能计算:根据所收集的数据,利用性能计算软件进行起飞性能的计算。
这涉及到升力计算、滑跑距离计算和爬升性能计算等。
3. 结果分析和验证:通过对计算结果进行分析和验证,评估飞机的起飞性能是否满足要求。
如果不满足要求,则需要进一步优化飞机设计或调整起飞参数。
二、安全性评估安全性评估是指对飞机在各个阶段的安全性进行评估,包括起飞、巡航、爬升和降落等。
安全性评估的目的是确定飞机在正常和异常情况下的安全性能,并评估飞机系统的可靠性。
安全性评估通常包括以下步骤:1. 风险分析:对飞机在各个阶段面临的风险进行分析,包括机械故障、气象突发变化和人为错误等。
通过识别和评估潜在的风险,可以采取相应的措施来降低事故的发生概率。
2. 故障树分析:利用故障树分析方法,对飞机系统的可靠性进行评估。
故障树分析可以帮助确定飞机系统中潜在的故障路径和故障模式,并评估其对飞行安全的影响。
3. 仿真和测试:通过使用飞机性能仿真软件进行安全性评估,模拟各种正常和异常的飞行情况,测试飞机在不同情况下的安全性能。
这包括起飞、巡航、爬升、降落和紧急情况等。
4. 结果分析和改进:根据仿真和测试结果进行分析,评估飞机的安全性能,并提出相应的改进措施。
起飞性能介绍
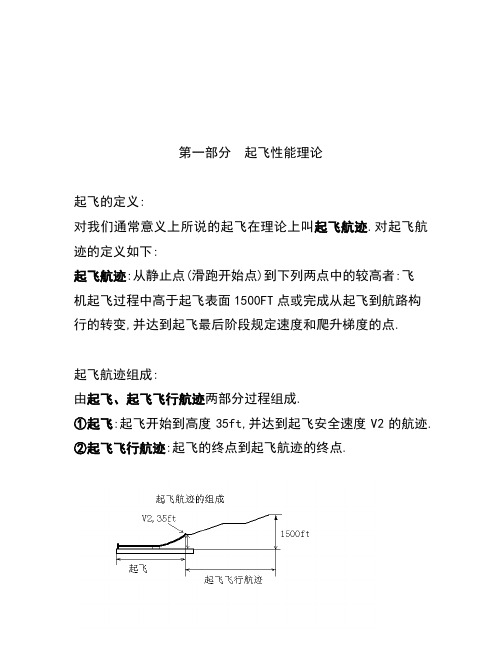
第一部分起飞性能理论起飞的定义:对我们通常意义上所说的起飞在理论上叫起飞航迹.对起飞航迹的定义如下:起飞航迹:从静止点(滑跑开始点)到下列两点中的较高者:飞机起飞过程中高于起飞表面1500FT点或完成从起飞到航路构行的转变,并达到起飞最后阶段规定速度和爬升梯度的点.起飞航迹组成:由起飞、起飞飞行航迹两部分过程组成.①起飞:起飞开始到高度35ft,并达到起飞安全速度V2的航迹.②起飞飞行航迹:起飞的终点到起飞航迹的终点.1.平衡场地的三种起飞过程:(图一)①全发正常:从松刹车开始,全发加速滑跑到VR,在VLOF离地,加速爬升到35FT,速度达到V2安全速度.FAR规定的起飞跑道距离应为实际起飞跑道距离的1.15倍.②继续起飞:从松刹车开始,全发加速滑跑,在速度VEF一台发动机停车,驾驶员在规定时间内做出判断后的速度达到V1,飞机在临界发动机不工作的条件下继续起飞,在跑道端速度达到V2,高度35FT.FAR规定VEF-V1的判断时间0-2秒,起飞跑道长度为起飞实际距离.③中断起飞:从松刹车开始,全发加速滑跑,在速度VEF时临界发动机实效,在规定时间内驾驶员做出判断,在速度V1时开始采取减速措施(油门慢车位,刹车,使用减速板),最后由于采取了减速措施使飞机安全停止在跑道上(其中不计反推效应).中断起飞各段组成:全发加速段(0-VEF)、判断阶段(VEF-△V,0-2秒)、减速过渡段(V1-VB)、减速停止段(VB-0)对过渡段采取措施的时间根据管理机构和公司的要求各不相同. 通常试飞验证的过渡段时间(2秒以内)比规定时间(3-4秒之间)要短一些.2.起飞过程中的几种速度的定义:☐决断速度临界发动机在该速度被判定停车时,驾驶员可以安全地继续或中断起飞, 且继续起飞的距离不会超过可用的起飞距离,中断起飞距离也不超过可用的中断起飞距离.V1不得小于最小地面操纵速度,也不得大于抬前轮速度.VR≥V1≥VMCGV1与VEF关系:V1大于(等于)VEF+规定时间内临界发动机不工作时飞机速度增量之和.☐抬前轮速度是飞机开始抬前轮的速度,在该速度抬前轮能使飞机在起飞终点高于起飞表面35FT并速度达到V2.VR≥V1VR≥105%VMCA对任何一组给定的条件(飞机重量,飞机构形和环境温度等)继续起飞和全发起飞均使用相同的VR值.☐起飞安全速度飞机在起飞终点应达到的速度.V2≧1.2VS(双发) V2≧1.15VS(三发以上)V2≧1.1VMC(空中最小操纵速度)使用V2安全速度的意义:1.当速度稍小于上述要求值时,飞机仍能保持正的爬升梯度.2.由于风或驾驶员操作不当引起速度减小时,仍能保持操纵.3.有一定的应角裕度,以防遇到向上阵风时造成失速.4.当一发停车并伴随有速度误差时,飞机仍能保持操纵.☐最小离地速度全发工作或一发不工作时,飞机可在最小离地速度VMU 安全离地并继续起飞,不会出现擦尾的危险.实际使用中与飞机外形及发动机状态的有关.☐离地速度VLOF是飞机开始腾空瞬间的速度.全发起飞时不小于110%VMU,如飞机有腹鳍和姿态警告系统(AWS),VLOF不小于108%VMU,单发时要求VLOF不小于105%VMU.最小操纵速度VMCA:在该速度,临界发动机停车,能在该发动机继续停车情况下恢复对飞机的操纵,维持0偏航或坡度不大于5度的直线飞行.维持方向舵所需的方向舵脚蹬力不超过150磅.VMCG:在该速度,当临界发动机停车时,有可能仅使用气动力主操纵(不使用前轮转弯)来恢复对飞机的操纵,用正常的驾驶技巧和不超过150磅方向舵脚蹬力能安全地完成继续起飞.通过试飞获得.3.平衡场地长度和非平衡场地长度(1)平衡场地长度平衡场地长度指临界发动机停车时,按继续起飞距离等于中断起飞距离而确定的场地长度,在其他条件不变时,决断速度增大,则继续起飞的距离缩短,中断起飞距离增大,只在某一V1值时两种距离才相等,此时V1表示为V1BAL.平衡场地起飞时的关系式:A+B+C=A+D+E全发起飞时的V2和VLOF值比单发时大些,VR相同.V1后速度增加1节左右后开始减速.平衡长度示意图(2)非平衡场地长度不满足平衡场地长度条件时确定的场地长度为非平衡场地长度.出现情况有两类:(A)按平衡场地长度考虑时,由于要满足对起飞速度的有关要求而出现非平衡场地长度情况.(B)由于使用了净空道和安全道后,使继续起飞距离不等于中断起飞距离而出现的非平衡场地长度情况.*FAR净空道定义:净空道对称地设置在跑道中心延长线上,宽度不小于500英尺,其净空道面从跑道端开始,以把超过1.25%的坡度向上延伸,除在跑道前端两侧处有高度不大于26英寸的跑道灯外,没有任何地形或障碍物穿过此面.净空道的地面应处于机场当局的控制与管辖之内.净空道仅供飞机飞越.*FAR安全道定义:安全道对称地设在跑道延长线上,宽度不小于跑道宽度,道面强度足以支持中断起飞的飞机重量,安全道仅供中断起飞时飞机减速滑跑用.FAR关于使用净空道和安全道的三个条件:A.中断起飞距离不得超过跑道长度与安全道之和B.继续起飞距离不得超过跑道长度与净空道之和C.起飞滑跑距离加上一半拉起爬升距离不得超过跑道长度4.起飞航迹分段和各段对爬升梯度的要求(1)第一段从飞机离地35FT起到起落架受上止.使用起飞推力,襟翼位置不变.升降速度表指示正值时开始收起落架,表速V2,等表速爬升.(2)第二段等表速爬升段,爬高以保证安全.使用起飞推力,等表速V2爬升,襟翼位置不变,爬升到400FT止.(3)第三段收襟翼段,平飞加速到爬升速度VC,使用起飞推力或最大连续推力,随速度增加逐渐收上襟翼,VC≧1.25VS.(3)第四段最后爬升段,最大连续推力,光洁机身,使用VC速度爬升到1500FT.**FAR-25对上述各段可用最小爬升梯度要求:双发飞机:第一段:正梯度第二段:2.4%第四段:1.2%**净梯度:考虑到仪表及操作误差的影响,如果在爬升越障过程中以实际的爬升梯度对应的总航迹与障碍物进行比较,有可能不能保证飞行的安全,因此引进净航迹的概念,即在总航迹对应的实际梯度上减小0.8%作为净航迹对应的净梯度,以净航迹高出障碍物35英尺为标准来进行越障评估.双发飞机减去0.8%为净梯度5.灵活推力起飞(1)原理灵活推力法也叫假想温度法.当外界温度升高,发动机推力由于受到排气温度限制而要减小,灵活温度法即用这种发动机推力变化的规律来确定在飞机起飞重量没有达到最大起飞重量时发动机推力可以减小的值.具体确定的方法是假设一个较高的温度,在该温度由于发动机受排气温度限制而提供的一个比正常温度时小的输出马力刚好能保证对实际起飞重量的的要求.(2)MD-82灵活温度设计方法MD-82(JT8D-217A)机型是按照减小推力额定值方法和灵活推力理论组合使用而设计的.JT8D-217A发动机是按照减小发动机功率输出额定值的方法提供发动机的推力,图中MAX所对应的图线为该发动机可提供的最大EPR限制范围,NORM所对应的图线为发动机提供的减小额定值后的EPR限制范围(此时减小的EPR储存于ART),实际上这种减小额定值后所提供的NORM EPR 限制本身已经是减小推力起飞了.图中MAX为最大EPR限制图线,NORM为正常EPR限制图线.①当温度低于T1(MD-82,JT8D217A一般为29度),发动机EPR值不变,MAX EPR=1.99;NORM EPR=1.93②当灵活温度低于T2时,NORM EPR + △EPR 大于1.93(NORMEPR的最大值)③T A,TB的含义:使用正常推力在外界温度为TA时所对应的EPR值,等于在假设温度用最大起飞推力(即正常EPR+ART关而增加的推力),当外界实际温度高于TA时,正常起飞推力将小于假设温度所对应的最大推力,所以不可以使用灵活推力起飞.当外界实际温度低于TA时,正常起飞推力大于假设温度对应的最大推力,说明发动机可以提供所需马力的要求,所以可用灵活推力起飞.假设温度TB,起飞推力为TB所对应的最大EPR.6.污染跑道起飞(1)跑道上覆盖2-3毫米以下的水时,称为湿跑道.(2)跑道上覆盖3毫米以上的水、雪浆、湿雪和干雪时,称为污染跑道.(3)麦道公司在飞行性能手册中以1/2和1/4两种污染程度提供了在污染跑道起飞时的跑道换算方法,即以污染跑道换算成相当于干跑道的换算跑道长度,以此换算干跑道长度做起飞性能分析.见(机组操作手册-性能分册-起飞部分) Section 7 2-20-40 page 9(4)在污染跑道上起飞,如果还使用干跑道时的数据(飞机重量,发动机推力等数据不变),只是把V1速度小到最小地面操纵速度来操作,而不做起飞重量和的校验和修正,这种方法会造成起飞距离的非平衡场地情况的出现,继续起飞距离有可能超出跑道长度范围.所以,在操作中建议使用麦道公司提供的污染跑道计算软件提供的数据或按飞行手册中提供的数据减小起飞重量,并按换算干场地长度进行快速查表进行起飞性能分析.见(机组操作手册-性能分册-起飞部分)Section 7 2-20-40 Page 9到20 页7.最大起飞重量对最大起飞重量的限制较多,在实际使用中我们经常遇到的(除飞机结构强度限制)是场地长度限制和第二阶段爬升梯度及越障限制.(1)最佳襟翼概念的引进就是因为它是同时满足上述两种限制情况下的能使起飞重量达到最大值的襟翼角度.因为起飞航迹是由起飞和起飞飞行航迹两个阶段组成,所以我们在考虑起飞重量限制时一定要满足上述两种情况的要求,也就是要满足场地长度对起飞重量的限制,还要考虑第二爬升阶段梯度和净航迹越障对起起飞重量的要求.无论是用麦道公司提供的软件进行计算还是应用机组操作手册(性能手册)进行查表计算,最佳襟翼的使用都是符合上述两个阶段的对飞行安全要求.(2)在使用11度襟翼起飞时,为满足对场地长度和爬升限制的要求,麦道公司计算软件在固定襟翼计算模式中对场地限制和爬升限制进行了分别计算,这要求飞行员在查起飞性能数据表时,要拿场地限制的最大起飞重量和对应温度的最大起飞重量进行比较,得出的最大起飞重量必须同时符合场地和爬升这两种限制.如果只考虑了场地限制而忽视了爬升限制,使起飞重量超出了单发爬升越障限制,在单发继续起飞爬升过程中就不能保证飞行安全.。
飞机的起飞性能讲义

爬升限制的最大起飞重量:
飞机重量越大,爬升梯度越小,而FAR-25,规定了最小可用的 爬升梯度,这就限制了最大的起飞重量。
C.G
FN D
W (1 V dV )
g dH
Page 14
飞机性能工程
起 飞 性 能 Takeoff Performance
§3 爬升限重
4、第二爬升段---等表速爬升段
起 飞 性 能 Takeoff Performance
2、起飞航迹分段
起飞飞行航迹:起飞终点到起飞航迹终点。
Page 7
飞机性能工程 §3 爬升限重
起 飞 性 能 Takeoff Performance
3、第一爬升段
从离地35ft到起落架收上。
Page 8
飞机性能工程 §3 爬升限重
3、第一爬升段
§3 爬升限重
1、主要的爬升性能参数 爬升梯度的影响因素:
➢ 爬升梯度与剩余推力成正比,与推力、阻力有关(温度、高度、 flap、速度)。
➢ 爬升梯度与飞机重量成反比,重量越大,爬升梯度越小。
➢ 爬升梯度还与加速因子有关(加速度、动能)。
C.G
FN D
W (1 V dV )
g dH
Page 5
§3 爬升限重
1、主要的爬升性能参数
爬升梯度:
FN
D W sin
W g
dV dt
; 1
FN
D W sin
W g
dV dH
dH dt
;
FN
D W sin
W g
dV V sin ;
dH
CG tan sin
FN D
W
(1
V g
飞 行 性 能

飞行性能
二、 爬升性能
从飞机起飞结束(此时飞机的高度为1500 英尺)到达规定的巡航速度和高度的过程称为航 线爬升。民用大型飞机的爬升是指在中低空保持 表速不变爬升,而在高空保持等M数不变爬升。 爬升过程中,若保持表速不变,由于空气密度减 小,真速将不断增大,即为了保持表速不变,必 须用一部分剩余推力增速,所以飞机的爬升梯度 和爬升率都要减小。
C:在10 000英尺高度平飞加速到上升速度。 D:按给定的表速和指示马赫数上升到上升顶点。 E:在初始巡航高度加速到巡航速度。 F:巡航。
飞行性能
三、 下降性能
与爬升性能类似,下降性能主要 由下降时间、下降的水平距离和下降 时所消耗的燃油量来表示。大型民航 运输机常用的下降方式有低速下降、 高速下降和最省燃油下降。
飞行性能
飞行姿态仪表
图2-19 高速下降和低速下降
飞行性能
四、 巡航性能
巡航性能是指 飞机从爬升顶点到 下降开始点之间的 平飞巡航性能。选 择好巡航高度和巡 航速度可以实现良 好的经济性。图221为某型号飞机的 典型巡航剖面图。
图2-21 某型号飞机的典型巡航剖面图
飞行性能
五、 着陆性能
飞机经历下降阶段后,开始进近与着陆。 着陆阶段虽然历时短,却是飞行中最危险、 最关键,也是最重要的阶段。现代大型民航 客机多是按仪表飞行规则飞行。各航空公司 对进近和着陆都制定了严格、全面的标准操 作程序和规章制度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.4T
10/12/12
第2章 第 30 页
检查V1≤VMBE
2.5.2 减推力起飞
飞机的实际起飞重量通常小于最大标准的起飞重量。因 此,在某些情况下,可以用小于最大起飞推力的推力起 飞。按照实际重量调整推力是有利的,因为它可以增加 发动机的寿命和可靠性,同时降低维护和运营成本。 使用特定的降低额定功率水平(被称 为降低额定功率减推力起飞)的概念 减功率起飞 基于假设温度法的减推力起飞的概念 假设温度减推力起飞(灵活推力起飞)
第 2章 第 8 页
VMBE减小
V1增大
例:机场气压高度6000ft,气温40℃,坡度为0,顺风10kts,起飞重量 60T,襟翼5,确定起飞速度。
158kts
第 2章 第 9 页
VMBE调整
V1每超过VMBE1kt,减轻重量340kg,然后按减轻后的重量确定V1/VR/V2
●对风进行修正,VMBE=158-19=139kts ● V1=146kts>
第2章 第 31 页
这些起飞运行通 常分为两类:
减功率起飞
减功率起飞的实质是将发动机看作一个较小功率的 发动机,其最大功率(较减功率前小)在该次起飞中 不许超越。 对于飞机与不同额定功率减小量的发动机组合,都 要经过审定,达到法规要求。每架飞机飞行手册中备 有相关的限制、程序和性能数据(起飞重量计算表)。 减功率起飞在确定起飞性能时,必须使用和相应功率 相对应的起飞性能图表
对于某些机型采用减小襟翼的方法仍然使得场地限制的最大起飞 重量大于上升梯度限制的最大起飞重量较多,此时就可以采取所谓 的改进爬升来增大起飞重量。
上升梯度
航道Ⅱ段的爬升梯度不够?
V2小于对应重量下的陡升速度
标准V2
V陡升
速度
第2章 第 29 页
故采用改进爬升,起飞速度V1/VR/V2 比对应重量下正常的V1/VR/V2大。
第2章 第 19 页
2.4.7 航路最低安全高度的限制
对于飞越山区的航线,当山区范围较大,不宜设置改航点时,飞 机的最大起飞重量往往还会受到航道最低安全高度的限制。当飞 机在巡航飞行中一台发动机停车,飞机以指定速度飞行的升限降 低,可能使飞机此时的升限低于山的高度。
第2章 第 20 页
2.4.8结构强度限制
第 2章 第 3 页
2.4.1 场道条件对最大起飞重量的影响
跑道限制的最 大起飞重量应该 是起飞滑跑过程 中一台发动机停 车和全发起飞最 大重量的较小值。
第 2章 第 4 页
2.4.2 起飞航道Ⅱ段的爬升梯度对 最大起飞重量的限制
一发失效后,在起 飞航道Ⅱ段,飞机 速度较小,可能比 对应构形下的陡升 速度小,而且襟翼 在起飞位置,飞机 阻力较大,而在起 飞航道的第二段又 要求较大的上升梯 度,因此飞机的起 飞重量常常要受到 起飞航道Ⅱ段的爬 升梯度的限制
在任何时候,起飞重量都不能超过结构强度限制的 最 大起飞重量和最大无燃油重量。
第2章 第 21 页
★ ★限制飞机起飞重量的主要因素★ ★ 场道条件 起飞航道Ⅱ的爬升梯度 轮胎速度的限制 最大刹车能量限制 障碍物限制 最大着陆重量对最大起飞重量的限制 航路最低安全高度的限制 飞机结构强度的限制
可以利用富裕的跑道增速,使 飞机的离地速度比正常的离地 速度大,这样起飞初始上升速 度更接近陡升速度,于是就增 大了起飞剖面Ⅱ段的上升梯度, 在保证法规规定的最低上升梯 度的情况下可以增大爬升梯度 的限重
例:起飞襟翼1,场地限重63T,航道II段限重55T,改进前MTOW 为55T,试确定改进爬升后的MTOW、V1/VR/V2。 查图得 △W = 3.4T, △V1/△VR/△V2 = 10/12/12 MTOW=55+3.4=58.4T 对应的起飞速度 V1/VR/V2=150/152/158 58.4T改进爬升的V1/VR/V2=160/164/170
TOGA 5min限制
第2章 第 17 页
例:某机场有距飞机 起飞点18000ft,高 460ft的障碍物,气压 高度1000ft,气温35℃ 起飞襟翼15,逆风 20kts,确定障碍物限 制的最大起飞重量。 MTOW=43.7T
43.7T
第2章 第 18 页
2.4.6 最大着陆重量对最大起飞重量的限制
远障飞越程序
最低改平高度400ft
近障飞越程序
TOGA 5min限制
最大改平高度
中障飞越程序
TOGA 5min限制
扩展II段改平高度
近障
第2章 第 16 页
பைடு நூலகம்
中障
远障
小结:飞越远障、近障、中障的程序
TOGA 5min限制 MCT
Extended 2nd Segment
延长II段改平高度
最大改平高度 最低改平高度400ft
● 选择合适的起飞襟翼 ● 改进爬升
减推力起飞(灵活推力起飞)
● 减功率(减额定功率)法减推力起飞 ● 假设温度法减推力起飞
第2章 第 25 页
2.5.1 优化起飞程序 增大起飞重量
合理地选择起飞襟翼
结论:通常,偏度较小对场地长度限重不利,但对爬升梯度 限重和越障有利;而偏度较大影响相反。 K
1 襟翼位置 5
全额定跑 道限重
第2章 第 35 页
VMBE ,应调整起飞重量和速度
V1-VMBE=146-139=7kts,应减轻重量=340×7=2380kg
●调整后的TOW=60000-2380=57620kg ●对应V1=141kts
,VMBE=142kts
第2章 第 10 页
2.4.5 障碍物的限制
Takeoff flight path
梯度安全余量: 双发:0.8% 三发:0.9% 四发:1.0%
4°
第2章 第 27 页
空调的使用
起飞期间接通空调,发动机中部分气体引出作空调用,使发动机 推力下降从而降低了起飞性能。所以,建议当起飞时暂时关掉空调, 可以得到较短的起飞距离。但是也存在一些限制,如热天客舱温度 高或公司政策限制,并不总能这样做,除非使用辅助动力装置
第2章 第 28 页
改进爬升(通过增大V1/VR/V2值)
第2章 第 32 页
第2章 第 33 页
降低额定功率减推力起飞程序
【注】:在进行减额定推力起飞时,在飞机离地并高于最小收襟翼速度 (“F”速度)之前,一定不能选择TOGA 推力。这样做是因为性能计 算是按最小控制速度进行的,与TOGA 的不同。
第2章 第 34 页
减功率减推力起飞没有运行限制。 只要飞机性能允许,任何情况下均可使用。 特定情况下可以提高跑道限重。 -- 短道面 -- 湿道面和污染道面 原因:减功率可以导致较小的地面最小操纵速度VMCG
第 2章 第 6 页
例:机场气压高度6000ft,气温30℃,起飞襟翼5,确定MTOW。
MTOW=82.5T
第 2章 第 7 页
2.4.4 最大刹车能量限制
把刹车吸收的热能达到极限值时的飞机滑跑速度称为 最大刹车能量速度VMBE
下列情况,检查V1是否小于VMBE ● 压力高度高 ● 温度高 ● 顺风 ●大起飞重量 ●使用小角度襟翼 ● 用改进爬升起飞 (V1<VMBE)。 若V1>VMBE ,就应按规定减小起飞重量和速度。
本章主要内容
2.1 基本概念 2.2 全发起飞 2.3 起飞过程中一台发动机停车的起飞性能 2.4 限制最大起飞重量的因素 2.5 起飞性能的优化 2.6 飞机在污染道面上的起飞性能
第 2章 第 1 页
飞行性能与计划/CAFUC
2.4 限制最大起飞重量的因素
第 2章 第 2 页
限制飞机起飞重量的主要因素 场道条件 起飞航道Ⅱ的爬升梯度 轮胎速度的限制 最大刹车能量限制 障碍物限制 最大着陆重量对最大起飞重量的限制 航路最低安全高度的限制 飞机结构强度的限制
Obstacle Envelope
第2章 第 11 页
基本概念
在越障计算中所考虑的障碍物,是指A型障碍物图中,位于 起飞航迹内穿过1.2%平面的那些障碍物。 各国适航部门对起飞净空区的规定和要求不尽相同。图为 CCAR规定的起飞净空区,飞机必须以规定的安全裕度飞越此 区域内所有障碍物。起飞净空区始于起飞可用距离(TODA) 末端,图中宽度E/2根据航向变化程度和导航精度确定,如下:
第2章 第 14 页
②近障:障碍物距基 准零点小于41000ft的 称为近障。
一般位于航道二段, 飞跃后再改平 采用的越障程序是最 大改平高度上升程序
所谓最大改平高度是指在 这个高度上改平增速收襟 翼,在飞机增速到襟翼全 收状态的机动速度时,起 飞油门刚好达到5分钟的 使用时间限制。
远障飞越程序
最低改平高度400ft
近障飞越程序
TOGA 5min限制
最大改平高度
中障飞越程序
TOGA 5min限制
扩展II段改平高度
近障
第2章 第 15 页
中障
远障
③中障:障碍物距 基准零点在 41000~72000ft之 间,称为中障。
一般位于航道三段 采用的飞越程序是延长 起飞航道Ⅱ段的改平高 度上升程序 所谓延长起飞航道Ⅱ 段的改平高度是指保 持V2上升直到起飞油 门5分钟限制,然后改 平以最大连续推力增 速收襟翼
第 2章 第 5 页
2.4.3 轮胎速度的限制
在高温高原机场,特别是在有顺风的情况和相同起飞重量、相 同离地表速的情况下,飞机的离地速度(真速)大,轮胎旋转速度 快,轮胎受到的离心力大。当轮胎转速达到一定值时,巨大的离心 力和飞机的重力将使轮胎破裂,因此有必要考虑轮胎速度对最大起 飞重量的限制。 一般喷气式民用飞机每种机型都有几种具有不同速度限制的轮胎 可供选用。如737-300有三种选择,它们的限制速度分别为200、210、 250mile/h;B747有225、235 mile/h两种;B767则只有225mile/h一种。