MSP430-pwm方波占空比频率可调
基于MSP430单片机的直流电动机调速测速控制系统

!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
科技情报开发与经济
SCI-TECHINFORMATIONDEVELOPMENT&ECONOMY2006年第16卷第8期
测试,测试结果见图5。从图5中可以看出美国OMEGA公司Butt-
Welded热电偶响应时间约为41.6ms。
由于实验条件的限制,此响应时间的测试存在误差,这与美国OMEGA公司提供的时间常数
(300ms)略有差别,但是可以认为此热电偶响应时间的理论值与实测值在实验不确定范围内是基本吻合的。这种动态特性的测试方法也适用于其他表面温度传感器。与此同时,也说明了美国相干公司K—500型高功率CO2激光器可以作为瞬态表面高温传感器动态特性测试的加热热源。
参考文献
[1]
郝晓剑.瞬态表面高温测量与动态校准技术研究[D].太原:中北大
学,2005:66-68.
(责任编辑:王雅利)
───────────────
第一作者简介:郭华玲,女,1976年生,现为中北大学测控技术及仪器专业2003级在读硕士研究生,中北大学信息与通信工程学院,山西省太原市,030051.
DynamicMeasurementofButt-WeldedThermocouple
StimulatedbyModulatedLaser
GUOHua-ling
ABSTRACT:ThispaperputsforwardanewmethodofmakingthedynamicpropertytestonthesurfacetemperaturesensorbyusingthehighfrequencymodulatedhighpowerCO2laserasthedrivingsource,andsetsupadynamicpropertymeasuringsystem.AButt-WeldedthermocoupleofcompanyOMEGAhasbeentestedonthesystembyusingDIAMONGOMEGAseriesK—500typeCORHENTCO2laser,andtheexperimentalresultsshowthattheresponsetimeoftheButt-Weldedthermocoupleis41.6ms.
MSP430产生两路PWM波

#include #include void InitSys();void InitClk();void main(void){WDTCTL = WDTPW + WDTHOLD;InitSys();InitClk(); P1SEL |= BIT6;P1DIR |= BIT6;P1SEL |= BIT7;P1DIR |= BIT7; TACTL |= TASSEL_1+MC_1;//ACLK时钟,增计数 //清零寄存器TACCTL1 = OUTMOD_7;//TACCTL2 = OUTMOD_3;//TACCR0 = 33-1;//CCR0初值, 周期 1/1000s TACCR1 = 16;//占空比 TACCR2 = 16;//占空比//TBCTL|=TBSSEL_2+TBCLGRP_1+ID_3+MC_3+TBCLR; TBCCTL0 |= CCIE;TBCCR0 = 8000000;TBCTL |= TBSSEL_2+ MC_3+TBCLR;_BIS_SR(LPM3_bits);}#pragma vector = TIMERB0_VECTOR__interrupt void TimerB0(void){TACTL = TASSEL_1 + MC_0+TACLR;TBCTL = TBSSEL_2 + MC_0;}void InitSys(){unsigned int iq0;//使用XT2振荡器BCSCTL1&=~XT2OFF; //打开XT2振荡器do{IFG1 &= ~OFIFG; // 清除振荡器失效标志for (iq0 = 0xFF; iq0 > 0; iq0--); // 延时,等待XT2起振}while ((IFG1 & OFIFG) != 0); // 判断XT2是否起振BCSCTL2 =SELM_2+SELS; //选择MCLK、SMCLK为XT2//_EINT(); // 使能中断}void InitClk (){int i;BCSCTL1 &= ~XT2OFF; BCSCTL1 |= RSEL0+RSEL1+RSEL2;DCOCTL |= DCO0+DCO1+DCO2;do{IFG1&=~OFIFG;for(i=0x20;i>0;i--);}while((IFG1&OFIFG)==OFIFG); //当OSCFault=1 即晶振不起振则等待BCSCTL2 |= SELM_2+DIVM_0+SELS+DIVS_0; //SELS 选择xt2或LFXT1为smclk时钟源,F248位LFXT1_EINT();}
MSP430程序库之定时器TA的PWM输出
MSP430程序库之定时器TA的PWM输出
定时器是单片机常用的其本设备,用来产生精确计时或是其他功能;msp430的定时器不仅可以完成精确定时,还能产生PWM波形输出,和捕获时刻值(上升沿或是下降沿到来的时候)。这里完成一个比较通用的PWM波形产生程序。
1.硬件介绍:
MSP430系列单片机的TimerA结构复杂,功能强大,适合应用于工业控制,如数字化电机控制,电表和手持式仪表的理想配置。它给开发人员提供了较多灵活的选择余地。当PWM 不需要修改占空比和时间时,TimerA 能自动输出PWM,而不需利用中断维持PWM输出。
MSP430F16x和MSP430F14x单片机内部均含有两个定时器,TA和TB;TA 有三个模块,CCR0-CCR2;TB含有CCR0-CCR67个模块;其中CCR0模块不能完整的输出PWM波形(只有三种输出模式可用);TA可以输出完整的2路PWM波形;TB可以输出6路完整的PWM波形。
定时器的PWM输出有有8种模式:
输出模式0 输出模式:输出信号OUTx由每个捕获/比较模块的控制寄存器CCTLx中的OUTx位定义,并在写入该寄存器后立即更新。最终位OUTx直通。
输出模式1 置位模式:输出信号在TAR等于CCRx时置位,并保持置位到定时器复位或选择另一种输出模式为止。
输出模式2 PWM翻转/复位模式:输出在TAR的值等于CCRx时翻转,当TAR 的值等于CCR0时复位。
输出模式3 PWM置位/复位模式:输出在TAR的值等于CCRx时置位,当TAR 的值等于CCR0时复位。
北京邮电大学课设 基于MSP430的简单信号发生器的设计

基于MSP430的信号发生器
设计报告
学院:电子工程学院
班级:2013211212
组员:唐卓浩(2012211069)
王旭东(2013211134)
李务雨(2013211138)
指导老师:***
一、摘要
信号发生器是电子实验室的基本设备之一,目前各类学校广泛使用的是标准产品,虽然功能齐全、性能指标较高,但是价格较贵,且许多功能用不上。本设计介绍一款基于MSP430G2553
单片机的信号发生器。该信号发生器虽然功能及性能指标赶不上标准信号发生器,但能满足一般的实验要求,且结构简单,成本较低。本次需要完成的任务是以MSP430 LaunchPad 的单片机为控制核心、DAC 模块作为转换与按键电路作为输入构成的一种电子产品。MSP430 LaunchPad 单片机为控制核心,能实时的进行控制;按键输入调整输出状态,DAC0832将单片机输出的数字信号转化为模拟量,经运放放大后,在示波器上输出。在本次程序设计中充分利用了单片机内部资源,涉及到了中断系统、函数调用等。
关键字:信号发生器 MSP430 单片机 数模转换
二、设计要求
以msp430单片机为核心,通过一个DA (数字模拟)转换芯片,将单片机输出的方波、三角波、正弦波(数字信号)转换为模拟信号输出。提供芯片:msp430G2553、DAC0832、REF102、LM384、OP07。参考框图如下:
Lauchpad MSP430
电位器
按键1
DA 转换DAC0832
放大输出LM384
按键N
按键2
AD
……
图1 硬件功能框图
1、基本要求
(1) 供电电压 VDD= 5V~12V ;(√) (2) 信号频率:5~500Hz(可调);(√)
MSP430 定时器A的使用
第四讲定时器A的使用
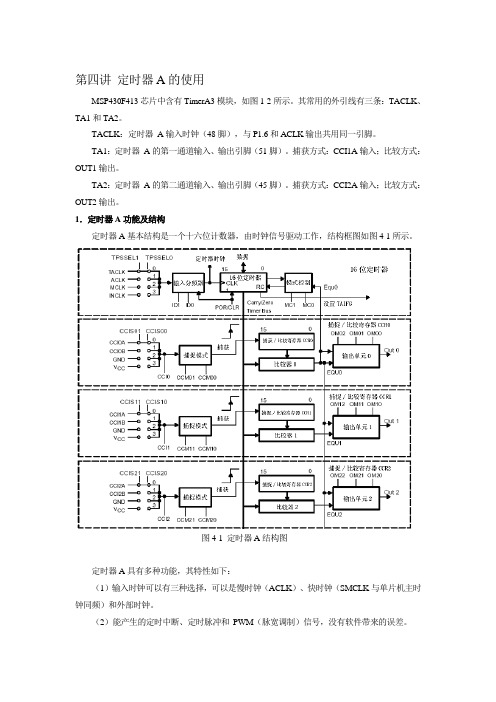
MSP430F413芯片中含有TimerA3模块,如图1-2所示。其常用的外引线有三条:TACLK、TA1和TA2。
TACLK:定时器_A输入时钟(48脚),与P1.6和ACLK输出共用同一引脚。
TA1:定时器_A的第一通道输入、输出引脚(51脚)。捕获方式:CCI1A输入;比较方式:OUT1输出。
TA2:定时器_A的第二通道输入、输出引脚(45脚)。捕获方式:CCI2A输入;比较方式:OUT2输出。
1.定时器A功能及结构
定时器A基本结构是一个十六位计数器,由时钟信号驱动工作,结构框图如图4-1所示。
图4-1 定时器A结构图
定时器A具有多种功能,其特性如下:
(1)输入时钟可以有三种选择,可以是慢时钟(ACLK)、快时钟(SMCLK与单片机主时钟同频)和外部时钟。
(2)能产生的定时中断、定时脉冲和PWM(脉宽调制)信号,没有软件带来的误差。
(3)不仅能捕获外部事件发生的时间,还可选择触发脉冲沿(由上升沿或下降沿触发)。
定时器A功能模块主要包括:
(1)计数器部分:输入的时钟源具有4种选择,所选定的时钟源又可以1、2、4或8分频作为计数频率,Timer_A可以通过选择4种工作模式灵活的完成定时/计数功能。
(2)捕获/比较器:用于捕获事件发生的时间或产生时间间隔,捕获比较功能的引入主要是为了提高I/O 端口处理事务的能力和速度。不同的MSP430单片机,Timer_A模块中所含有的捕获/比较器的数量不一样,每个捕获/比较器的结构完全相同,输入和输出都取决于各自所带控制寄存器的控制字,捕获/比较器相互之间完全独立工作。
基于MSP430系列单片机的感应加热系统
基于MSP430系列单片机的感应加热系统
作者:杨杰乔俊力丁友涛
来源:《电子世界》2012年第16期
【摘要】系统使用MSP430系列单片机控制驱动电路和产生PWM脉冲,同时实现感应加热系统的软启动功能。并且对IGBT温度、电流进行检测,根据保护信号及时做出响应防止IGBT因过流、过热而损坏。另外,结合注塑机的特点,注塑机温度稍高会导致料筒的原料被烧糊,所以用K型热电偶和MAX6675芯片检测料筒温度将其反馈到单片机,给感应加热加入PID调节来控制料筒温度。
【关键词】MSP430单片机;IGBT;驱动模块;PID
Induction Heating System Based on MSP430MCU
Wu Jian-hua,Chen Wei-min,Wang zhao-yong
(School of Mechanical and Electrical Engineering,Shandong University at Weihai,Weihai,264209)
Abstract:The system can generate and control the driving circuit to produce PWM pulses and achieve the goal of soft-start of the heating system.We also detect the temperature and current of IGBT to take effective steps to protect IGBT.Moreover,measure the temperature of cylinder with K-type thermocouple and give it back to MCU,then using PID to control the temperature.
MSP430定时器输出PWM方波

定时器A输出方波
1、定时器的PWM输出8种模式
输出模式0输出模式:输出信号OUTx由每个捕获/比较模块的控制寄存器CCTLx中的OUTx位定义,并在写入该寄存器后立即更新。最终位OUTx直通。
输出模式1置位模式:输出信号在TAR等于CCRx时置位,并保持置位到定时器复位或选择另一种输出模式为止。
输出模式2 PWM翻转/复位模式:输出在TAR的值等于CCRx时翻转,当TAR的值等于CCR0时复位。
输出模式3 PWM置位/复位模式:输出在TAR的值等于CCRx时置位,当TAR的值等于CCR0时复位。
输出模式4翻转模式:输出电平在TAR的值等于CCRx时翻转,输出周期是定时器周期的2倍。
输出模式5复位模式:输出在TAR的值等于CCRx时复位,并保持低电平直到选择另一种输出模式。
输出模式6 PWM翻转/置位模式:输出电平在TAR的值等于CCRx时翻转,当TAR值等于CCR0时置位。
输出模式7 PWM复位/置位模式:输出电平在TAR的值等于CCRx时复位,当TAR的值等于CCR0时置位。
下图是增计数模式下的输出波形:
2、程序:(TA定时器输出1K的方波)
void TAPWM(void)
{
//引脚设置(暂时使用P1.2输出一路PWM)
P1SEL |= BIT2; //TA1从P1.2输出
P1DIR |= BIT2; //TA1从P1.2输出
//P2SEL |= BIT0; //TA2从P1.2输出
//P2DIR |= BIT0; //TA2从P1.2输出
TACTL |= MC_1 +TASSEL_1; //时钟源选择ACLK,增计数模式TA设置
MSP430简介(超详细·)
msp430简介
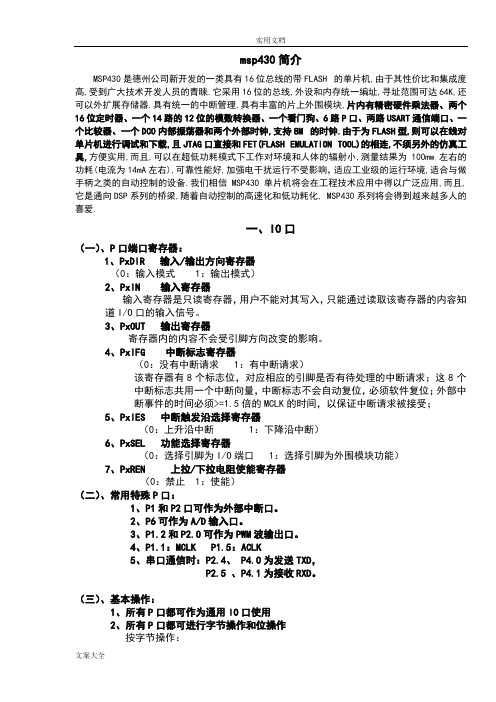
MSP430是德州公司新开发的一类具有16位总线的带FLASH 的单片机,由于其性价比和集成度高,受到广大技术开发人员的青睐.它采用16位的总线,外设和内存统一编址,寻址范围可达64K,还可以外扩展存储器.具有统一的中断管理,具有丰富的片上外围模块,片内有精密硬件乘法器、两个16位定时器、一个14路的12位的模数转换器、一个看门狗、6路P口、两路USART通信端口、一个比较器、一个DCO内部振荡器和两个外部时钟,支持8M 的时钟.由于为FLASH型,则可以在线对单片机进行调试和下载,且JTAG口直接和FET(FLASH EMULATION TOOL)的相连,不须另外的仿真工具,方便实用,而且,可以在超低功耗模式下工作对环境和人体的辐射小,测量结果为100mw左右的功耗(电流为14mA左右),可靠性能好,加强电干扰运行不受影响,适应工业级的运行环境,适合与做手柄之类的自动控制的设备.我们相信MSP430单片机将会在工程技术应用中得以广泛应用,而且,它是通向DSP系列的桥梁,随着自动控制的高速化和低功耗化, MSP430系列将会得到越来越多人的喜爱.
一、IO口
(一)、P口端口寄存器:
1、PxDIR 输入/输出方向寄存器
(0:输入模式 1:输出模式)
2、PxIN 输入寄存器
输入寄存器是只读寄存器,用户不能对其写入,只能通过读取该寄存器的内容知道I/O口的输入信号。
3、PxOUT 输出寄存器
寄存器内的内容不会受引脚方向改变的影响。
4、PxIFG 中断标志寄存器
(0:没有中断请求 1:有中断请求)
基于msp430单片机的智能台灯设计(C语言)

桂林理工大学信息学院
实习报告
实习名称:电子系统设计创新与实践
设计题目:基于单片机的智能台灯设计
专业班级:
姓名:
学号:
组员:
指导老师:
实习时间:
目录
1概述 (3)
1.1 题目名 (3)
1.2 功能和技术指标要求 (3)
1.3 国内外相关情况概述 (3)
1.4 调光技术的选择 (4)
2. 技术方案 (5)
2.1 光照强度检测传感器的基本原理介绍 (5)
2.2 总体技术方案 (5)
3 硬件设计 (6)
3.1 总体电路原理图 (6)
3.2 各模块分别介绍 (7)
3.2.1 MSP430G2553单片机模块 (7)
3.2.2 BISS0001 人体红外感应模块热释电传感器 (8)
3.2.3光敏电阻控制模块 (11)
3.2.4 光敏电阻的应用 (12)
3.3 灯光控制模块 (12)
3.4 PWM调光说明 (13)
3.5 硬件调试 (13)
3.5.1 调试方法 (13)
3.5.2 调试步骤 (14)
4. 软件设计 (15)
4.1 软件功能说明 (15)
4.2 软件总流程 (15)
4.3 软件测试 (15)
5. 性能测试 (16)
5.1 测试方法 (16)
5.2 给出相应记录 (16)
5.3 对实验数据进行分析以及提出相应的改进办法 (17)
6.总结 (17)
附录(程序清单):................................................. 错误!未定义书签。参考文献: (18)
1概述
1.1 题目名
基于单片机的智能台灯设计
1.2 功能和技术指标要求
本项目针对台灯的节电和使用的方便性进行创新设计与研究,以单片机为核心,综合运用热释电红外、光检测等技术,设计制作出智能型多功能LED台灯。该台灯具有自动开、关,自动调光等功能,实现了LED的亮度随周围光照强度的变化而变化。本设计一智能台灯控制器,实现照明控制系统的人性化,即当亮度足够时灯光关闭,在亮度不足时,有人走近自动点亮,并根据周围环境的亮度自动调节灯泡的功率的节能环保的智能型LED台灯的设计理念。
恒流源电路设计总结

软件部分
2、主要代码
1、主函数
文件名*main.c*
#include <msp430x14x.h>
#include "cry1602.h"
#include "cry1602.c"
#include "pwm.c"
typedef unsigned char uchar;
caltmp = (caltmp << 3) + (caltmp << 1); //caltmp = caltmp * 10
Curr_Volt = caltmp >> 12; //Curr_Volt = caltmp / 2^n
ptr[0] = Curr_Volt / 100; //Hex->Dec变换
P6DIR|=BIT6;P6OUT&=~BIT6; //半闭数码管显示
P6DIR|=BIT5;P6OUT&=~BIT5; //半闭数码管显示
//LCD设置
LcdReset(); //复位1602液晶
DispNChar(2,0,12,tishi); //显示提示信息
Disp1Char(11,1,'V'); //显示电压单位
{
sum += results[i];
MSP430简介(超详细·)
msp430简介
MSP430是德州公司新开发的一类具有16位总线的带FLASH 的单片机,由于其性价比和集成度高,受到广大技术开发人员的青睐.它采用16位的总线,外设和内存统一编址,寻址范围可达64K,还可以外扩展存储器.具有统一的中断管理,具有丰富的片上外围模块,片内有精密硬件乘法器、两个16位定时器、一个14路的12位的模数转换器、一个看门狗、6路P口、两路USART通信端口、一个比较器、一个DCO内部振荡器和两个外部时钟,支持8M 的时钟.由于为FLASH型,则可以在线对单片机进行调试和下载,且JTAG口直接和FET(FLASH EMULATION TOOL)的相连,不须另外的仿真工具,方便实用,而且,可以在超低功耗模式下工作对环境和人体的辐射小,测量结果为100mw左右的功耗(电流为14mA左右),可靠性能好,加强电干扰运行不受影响,适应工业级的运行环境,适合与做手柄之类的自动控制的设备.我们相信MSP430单片机将会在工程技术应用中得以广泛应用,而且,它是通向DSP系列的桥梁,随着自动控制的高速化和低功耗化, MSP430系列将会得到越来越多人的喜爱.
一、IO口
(一)、P口端口寄存器:
1、PxDIR 输入/输出方向寄存器
(0:输入模式 1:输出模式)
2、PxIN 输入寄存器
输入寄存器是只读寄存器,用户不能对其写入,只能通过读取该寄存器的内容知道I/O口的输入信号。
3、PxOUT 输出寄存器
寄存器内的内容不会受引脚方向改变的影响。
4、PxIFG 中断标志寄存器
(0:没有中断请求 1:有中断请求)
MSP430微控制器系列讲座十一利用PWM原理实现的DA转换

表示为F撒=F洲×2“,其中Fdocl(为PWM定时器频率,F洲为
PWM信号频率,即DAC的更新频率,n为DAC所需的比特分 辨率。
接下来将描述如何利用8_b.t PWM DAC产生一个250Hz 的正弦波和1 25Hz的斜波信号。采样频率为8kHz,每个正弦波 周期采样32个值《16X过采样),每个斜波周期采样64次《32x 过采样)。即PWM信号所需的频率为8kHz,所需的PWM时钟 为2.048MHz。
2.6叠加的DC和AC信号 通过PWM DAC产生的信号可以叠加在一起,将2/3VCC 电平加到正弦波上,产生一个偏置的正弦波信号的电路原理图如 图6所示,波形图如图7所示。 通过PWM输出可以很容易独立地调整交流和直流信号。 例如,正弦信号保持不变,直流偏置可以简单的通过改变PWM 占空比产生所需的直流电平。当然,使用其它单独的滤波器和加 法放大器也可以达到相同的结果。
2.1分辨率 PWM DAC的分辨率理论上即为定时器的计数器长度,通 常该值被保存在定时器的CCRO寄存器中。PWM的最低有效位 是定时器的一个计数值,而分辨率即为定时器所能计数的最大
:
卜固定频率一
0夕 占空比
MSP430 微控制
一几.几几.J
PwM输出
pwm调节占空比的基本原理

pwm调节占空比的基本原理
PWM调节占空比的基本原理PWM(脉宽调制)是一种常用的电子调节技术,通过调节信号的占空比来控制电路的输出。它在许多领域中得到广泛应用,如电机控制、电源管理和光照调节等。
PWM调节占空比的基本原理是利用一个周期性的信号,即PWM信号,来控制电路的通
断时间。这个信号由一个固定频率的方波和一个可变占空比的调制信号组成。占空比是指方波中高电平的时间与一个周期的比例。
通过改变调制信号的占空比,可以改变电路的平均输出电平。当调制信号的占空比较小时,电路的平均输出电平也较低;而当调制信号的占空比较大时,电路的平均输出电平也较高。
利用PWM调节占空比的优势在于其高效性和精确性。由于PWM信号的周期性,电路可
以以较高的频率进行开关,从而减少能量损耗。通过精确地调节占空比,可以实现更精细的电路控制。
在电机控制中,PWM调节占空比可以用来控制电机的转速和扭矩。通过改变占空比,可
以改变电机的平均电压,从而控制电机的输出功率。在电源管理中,PWM调节占空比可
以用来控制电源输出的电压和电流,以满足不同设备的需求。在光照调节中,PWM调节
占空比可以用来控制LED灯的亮度,通过改变占空比,可以精确地调节LED的发光强度。
PWM调节占空比是一种高效而精确的电子调节技术。通过调节信号的占空比,可以实现
对电路输出的精细控制,广泛应用于电机控制、电源管理和光照调节等领域。
基于MSP430的直流电机调速系统方案
铁道大学毕业设计
基于MSP430的直流电机调速系统
Speed Control System Of DC Motor Based On
MSP430
2011届电气与电子工程学院
专业电气工程与其自动化
学号 20072853
学生梁春娇
指导教师育军
完成日期 2011年6 月1日
毕业设计成绩单
毕业设计任务书
毕业设计开题报告
摘要
本设计介绍了一种基于MSP430单片机实现的单闭环直流电机的调速系统,随着我国工业的发展,越来越多的生产机械要求能实现自动调速。由于MSP430系列的单片机具有处理能力强、运算速度快、集成度高、外部设备丰富、超低功耗等优点, 本设计介绍了一种基于MSP430单片机实现的单闭环直流电机的调速系统,该系统利用MSP430单片机的Timer-A模式产生PWM波,通过改变PWM波的占空比来控制电机的速度,并着重介绍了PWM的调速原理。其中采用光耦隔离的方法实现单片机与外部电路之间的电气隔离,PWM波经过功率驱动芯片放大后控制直流电机的电枢电压进行平滑调速并由霍尔元件检测出直流电机转速构成的速度反馈,设置四个独立性键盘分别控制电机的正反转、加速和减速,最后通过LED动态显示出直流电机的转速。采用MSP430单片机控制直流电机的转速取代了以往的模拟控制,使控制精度高,而且方便系统的升级和改进,灵活性和适应性更强。
关键词:MSP430 PWM调速直流电机
Abstract
This design introduces a MSP430 Microcontroller based single-loop DC motor speed control system, as Chinese industrial development, more and more production machinery required to achieve automatic speed control. MSP430 family of microcontrollers have the processing capacity, fast speed, high integration, the external device rich, ultra-low power consumption, etc.The design introduces a MSP430 Microcontroller based single-loop DC motor speed control system.The system uses the MSP430 microcontroller Timer-A mode PWM wave generated by changing the duty cycle of PWM wave to control motor speed, and highlights the PWM speed control principle. One method of using opto isolation between SCM and electrical isolation between the external circuit,
MSP430-定时器A的使用(含OUTMOD模式详解及运用)

MSP430-定时器A的使用(含OUTMOD模式详解及运用)第四讲
第四讲第四讲第四讲定时器定时器定时器定时器A的使用
的使用的使用
的使用MSP430F413芯片中含有TimerA3模块,如图1-2所示。其常用的外引线有三条:TACLK、TA1和TA2。
TACLK:定时器_A输入时钟(48脚),与P1.6和ACLK输出共用同一引脚。
TA1:定时器_A的第一通道输入、输出引脚(51脚)。捕获方式:CCI1A 输入;比较方式:OUT1输出。TA2
:定时器_A的第二通道输入、输出引脚(45脚)。捕获方式:CCI2A 输入;比较方式:OUT2输出。1...
.定时器
定时器定时器
定时器A功能及结构功能及结构功能及结构
功能及结构
定时器A基本结构是一个十六位计数器,由时钟信号驱动工作,结构框图如图4-1所示。
图4-1定时器A结构图
定时器A具有多种功能,其特性如下:
(1)输入时钟可以有三种选择,可以是慢时钟(ACLK)、快时钟(SMCLK与单片机主时钟同频)和外部时钟。
(2)能产生的定时中断、定时脉冲和PWM(脉宽调制)信号,没有软件带来的误差。(3)不仅能捕获外部事件发生的时间,还可选择触发脉冲沿(由上升沿或下降沿触发)。定时器A功能模块主要包括:(1)计数器部分:输入的时钟源具有4种选择,所选定的时钟源又可以1、2、4或8分频作为计数频率,Timer_A可以通过选择4种工作模式灵活的完成定时/计数功能。(2)捕获/比较器:用于捕获事件发生的时间或产生时间间隔,捕获比较功能的引入主要是为了提高I/O端口处理事务的能力和速度。不同的MSP430单片机,Timer_A模块中所含有的捕获/比较器的数量不一样,每个捕获/比较器的结构完全相同,输入和输出都取决于各自所带控制
基于MSP430单片机的信号发生器设计

基于MSP430单片机的信号发生器设计
信号发生器是一种用于产生各种波形信号的仪器,常用于电子实验、
通信测试等领域。本文将基于MSP430单片机设计一个简单的信号发生器,并介绍其原理、硬件电路和软件设计过程。
一、设计原理
MSP430是德州仪器(TI)推出的一款低功耗微控制器,具有丰富的
外设和易用的开发环境,适合用于嵌入式系统设计。通过MSP430的数字
模拟转换器(DAC)和PWM输出功能,我们可以实现一个基本的信号发生器。
本设计基于MSP430G2553单片机,通过PWM输出产生不同频率的方波,并通过DAC输出控制方波的幅度,从而生成正弦、三角和方波等不同波形
的信号。
二、硬件电路设计
硬件电路主要包括MSP430G2553单片机、DAC芯片、PWM输出电路和
运放放大电路。
1.MSP430G2553单片机
MSP430G2553单片机具有16位的定时器,可产生必要的时序信号,
以及8位的数字模拟转换器(DAC),可用于控制信号幅度。
2.DAC芯片
DAC芯片用于将MSP430的数字信号转换为模拟信号,并控制信号的
幅度。常用的DAC芯片有MAX523和TLV5620等。
3.PWM输出电路
PWM输出电路用于产生不同频率和占空比的方波信号。我们可以利用MSP430的定时器功能或使用外部PWM芯片,如L293D或ULN2803A。
4.运放放大电路
运放放大电路用于放大DAC输出的信号,以得到更高的输出幅度。我们可以选择常见的运放芯片,如LM324或OPA2134
三、软件设计过程
软件设计主要包括定时器配置、PWM输出配置和DAC控制等模块。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MSP430-pwm方波占空比频率可调
//********************************************************** *****************************
// MSP430 Blink the LED Demo - Software Toggle P1.0
//
// Description; Toggle P1.0 by xor'ing P1.0 inside of a software loop.
// ACLK = n/a, MCLK = SMCLK = default DCO
//
// MSP430x5xx
// -----------------
// /|\| XIN|-
// | | |
// --|RST XOUT|-
// | |
// | P1.0|-->LED
//
// J. Stevenson
// Texas Instruments, Inc
// July 2011
// Built with Code Composer Studio v5
//********************************************************** *****************************
#include
#include "tm1638.h"
unsigned char LED_CODE[] =
{ 0x3F, 0x06, 0x5B, 0x4F, 0x66, 0x6D, 0x7D, 0x07, 0x7F, 0x6F, 0x77, 0x7C, 0x39,
0x5E, 0x79, 0x71 };
float i=1000,j=500;
int main(void)
{
float a,b;
WDTCTL = WDTPW + WDTHOLD; // Stop watchdog timer
if (CALBC1_1MHZ == 0xFF || CALDCO_1MHZ == 0xFF) {
while (1); // If calibration constants erased, trap CPU!!
}
BCSCTL1 = CALBC1_1MHZ; // Set range
DCOCTL = CALDCO_1MHZ; // Set DCO step + modulation
BCSCTL2 = SELM_1 + DIVS_3; //set MCLK=DOC/8
P1DIR |= 0x01; // Set P1.0 to output direction
//引脚设置(暂时使用P1.2输出一路PWM)
P1SEL |= BIT6; //TA1从P1.6输出
P1DIR |= BIT6; //TA1从P1.6输出
P2DIR |= 0xff;
P2OUT |= 0XFF;
TACTL |= MC_1 +TASSEL_2+ID_0; //时钟源选择SMCLK,增计数模式TA设置
TACCTL1 = OUTMOD_7; //模式7 高电平PWM输出PWM设置
init_TM1638();
for(;;)
{
TACCR0 = i;
TACCR1 = j;
if(Read_key()==0)
{
while(Read_key()==0);
i=i+10; // 调频率
j=b*i/100;
}
if(Read_key()==1)
{
while(Read_key()==1);
i=i-10; // 调频率
j=b*i/100;
}
if(Read_key()==2)
{
while(Read_key()==2);
j=j+10; //调占空比
}
if(Read_key()==3)
{
while(Read_key()==3);
j=j-10; //调占空比
}
b=j*100/i; // 占空比
Write_DATA(0x00, LED_CODE[(int)b/10]);
Write_DATA(0x02, LED_CODE[(int)b%10]|0x80);
Write_DATA(0x04, LED_CODE[(int)(b*10)%10]);
a=1000000/(8.0*i);//频率
Write_DATA(0x08, LED_CODE[(int)a/100]);
Write_DATA(0x0a, LED_CODE[(int)a/10%10]);
Write_DATA(0x0c, LED_CODE[(int)a%10]|0x80);
Write_DATA(0x0e, LED_CODE[(int)(a*10)%10]);
}
}