工程飞行模拟器的高速实时数据采集系统设计
基于以太网的飞行模拟器数据采集系统软硬件设计

基于以太网的飞行模拟器数据采集系统软硬件设计飞行模拟器是用于空勤人员培训的仿真训练设备,它能够仿真演示飞机系统的功能原理,减少学员在真实飞机上的培训时间。
飞行模拟器的数据采集与处理信号大体有开关量(开入DI信号)、指示灯(开出DO信号)、脚蹬/驾驶杆/油门台等模拟量(AD信号)、步进电机驱动信号等。
如何提高国内飞行模拟器接口系统数据采集速率,实现接口控制模块化和检测功能,提高维护效率一直是飞行模拟器研究的关键问题之一。
本文总结了国内外飞行模拟器接口系统数据采集发展的特点,简要分析了以太网通信和ARM芯片STM32技术的发展。
根据飞行模拟器实际的需要,该系统开发设计电路板,选用以太网作为主机与主板之间通信的方式,使用STM32F429作为数据采集系统主控制板的处理器,各从控制板采用STM32F103作为板卡的主控芯片,主控制板与各从控制板之间使用SPI通信。
论文从飞行模拟器数据采集系统的方案总体设计、数据采集控制系统的硬件设计、数据采集控制系统的软件设计和数据采集系统软件测试概述这四大主题展开叙述。
其中总体方案设计包括飞行模拟器数据采集系统的数据采集控制系统总体方案的设计,数据采集系统的数据采集分线系统的总体方案设计和基于数据采集系统的测试软件的总体方案设计三方面;数据采集控制系统硬件设计包括主控制板的硬件设计和各从控制板的硬件设计:数据采集控制系统的硬件设计以4U机箱为主体,分为三大块,一块为底板的硬件设计(底板为主板与各从板之间数据连接的桥梁);一块为主板的硬件设计(主板与主机之间采用以太网通信);另一块为从板的硬件设计(从板根据飞行模拟器的数据要求进行扩展),从板的设计包括DI控制板、DO控制板、AD控制板和步进电机控制板;数据采集控制系统的软件设计使用KEIL5开发环境,采用C语言编程,完成各从控制板程序设计,主控制板与主机之间通过以太网进行通讯,主控制板与各个从控制板之间通过SPI进行通讯;数据采集系统软件测试概述主要描述了各个控制板测试界面的使用。
飞行训练仿真系统中实时数据同步模型设计与实现

第23卷第2期2017年4月载人航天Manned SpaceflightVol.23 No.2Apr.2017飞行训练仿真系统中实时数据同步模型设计与实现林万洪U2,邓华1,熊颖\晁建刚U2,杨进1(1.中国航天员科研训练中心,北京100094 ; 2.中国航天员科研训练中心人因工程重点实验室,北京100094)摘要:针对下一代航天飞行训练模拟器分布式仿真系统对仿真数据管理与实时同步的高要求,分 析了国内外仿真系统数据同步技术发展现状,在前期任务数据分发模型的基础上,提出了基于组 播、共享内存和订阅发布技术的局域网仿真数据高速同步方法,设计了一种基于数据语义标识的 通信模型。
仿真试验表明:此模型合理高效,与上一代同步技术比较,同步时钟提高到10 m s内,相同节点数目时,40 m s仿真周期内数据量提高了近一倍,开发效率提高了一倍以上。
关键词:飞行训练仿真系统;分布式仿真;数据同步中图分类号:TP391.9 文献标识码:A文章编号=1674-5825(2017)02-0191-06 Design and Implementation of Real Time Data SynchronizationModel in Flight Training Simulation SystemL I N W a n h o n g1,2,D E N G H u a1 ,X I O N G Ying1 ,C H A O Jiangang1,2,Y A N G Jin1(1. China Astronaut Research and Training Center, Beijing 100094, China;2. National Key Laboratory ofHuman Factors Engineering, China Astronaut Research and Training Center, Beijing 100094, China) Abstract :According t o the higher requirements on the simulation data management and real-time synchronization o f the next generation distributed simulation system o f space f l i g h t training simulator, the development status o f data synchronization technology in simulation systems was analyzed.On the basis o f the data distribution model adopted by previous simulation systems,a new method o f high speed synchronization o f local area network simulation data based on multicast,shared memory and SUB-PUB was proposed in t h i s paper.In addition,a communication model based on data semantic identification was designed.The simulation results showed that t h i s model was reasonable and efficient.As compared with the previous generation of synchronous clock synchronization technology,the synchronize clock was raised up t o 10m s,the a b i l i t y o f synchronization was nearly doubled under the same number of nodes within40 ms simulation period,and the development efficiency wasmore than doubled.Key words:f l i g h t training simulation system;distributed simulation;data synchronization1引言空间站任务中要求飞行训练模拟器能够提供 给航天员空间站全任务流程的训练支持,并同时 能够满足多个航天员乘组在模拟器进行训练。
航空工程中的飞行模拟器技术使用教程

航空工程中的飞行模拟器技术使用教程航空工程中的飞行模拟器技术已经成为了一个重要的训练工具,在飞行员培训、飞行器研发和飞行试验中发挥着重要作用。
本文将为您介绍航空工程中飞行模拟器的基本原理、使用方法和相关技术。
一、飞行模拟器的基本原理和分类飞行模拟器是通过计算机技术模拟飞行器的机载设备和操作环境,使得飞行员能够在接近真实飞行的环境中进行训练和试验。
根据功能和应用范围的不同,飞行模拟器分为全面飞行模拟器(FFS)、部分飞行模拟器(PFS)和飞行训练设备(FTD)等不同级别。
全面飞行模拟器(FFS)是最高级别的模拟器,能够模拟复杂的飞行器操作和各种飞行场景。
它配备了真实飞行器的机舱展示和全面的运动平台,可以提供与真实飞行器接近的体验。
部分飞行模拟器(PFS)则是比FFS简化了一些功能,适用于特定任务的训练。
它可以提供逼真的飞行动态和机载设备模拟,但机舱展示和运动平台的功能较弱。
飞行训练设备(FTD)是一种更为简化的飞行模拟器,用于初级飞行员培训,功能较弱,但成本较低。
它通常没有机舱展示和运动平台,但能够提供基本的飞行操纵和系统操作训练。
二、飞行模拟器的使用方法1. 飞行模拟器的操作界面飞行模拟器的操作界面通常由显示器、控制杆、油门和脚踏板等组成。
显示器用于呈现模拟飞行的场景和仪表信息,控制杆和油门用于模拟飞行器的操纵,脚踏板则用于操纵飞行器的方向和刹车。
2. 飞行模拟器的基本训练任务飞行模拟器可以进行各种类型的飞行训练任务,包括起飞和降落、飞行器操纵、紧急程序、特殊环境飞行等。
通过模拟这些任务,飞行员可以提高其飞行技能和应对各种复杂情况的能力。
3. 飞行模拟器的高级训练功能除了基本的飞行训练任务外,飞行模拟器还可以提供一些高级的训练功能,例如天气环境的模拟、机载故障的模拟、飞行计划和导航系统的操作等。
这些高级功能可以帮助飞行员更好地了解和应对真实飞行中的各种复杂情况。
三、飞行模拟器的技术要点1. 飞行模拟器的数据更新飞行模拟器的数据更新非常重要,包括地景数据、航空气象数据、导航数据库等。
基于RTX的飞行模拟器分布式实时仿真系统
Ab ta t F ih i l tri o l a e i r u e e lt i l t n s se T e s lt n b s d o X a d RT T / P i s r c : l tsmu ao a c mp i t d d s i td ra ・ me smu ai y tm. h ou i a e n RT n ・ CP I s g s c tb i o o it d c d a d t e meh d o e in a d i lme tt n i s e i e . h r cia e u t h w h tt i s se a o d r a—i nr u e , n h t o f s n mp e n ai s p cf d T e p a t lr s l s o s t a s y t m h s g o e t o d g o i c h l me p roma c , n u ssa l n eib y me t t e d sg e d 、 i s lto e c b d c n b s d f rr fr n e a d g ie fr e r n e a d r n tb y a d r l l, es h e in n e s T s ou in d s r e a e u e o e ee c n u d f a h i o oh rd s b t d smu a in s se ih h s c t a e l i e u r me t t e it u e i lt y tmswhc a r i l a - me r q i i r o ic r t e n、 Ke r s fih i l tr R X; it b t d r a - me smu ain R — P I y wo d :l tsmu ao ; T d s u e e t i l t ; T - / P g i r l i o TC
民用飞机工程模拟器设计
民用飞机工程模拟器设计作者:涂相征来源:《软件导刊》2015年第01期摘要:飞机工程模拟器是人在回路的飞机半实物仿真平台,贯穿于飞机系统研制的各个阶段。
在飞机研制的不同时期,工程模拟器都可以配合飞机研制实现相应的试验和验证功能。
视实际用途的不同,飞机工程模拟器有带运动系统和不带运动系统两种,介绍了具有一定自由度带运动平台的工程模拟器方案设计。
关键词:飞机工程模拟器;六自由度运动系统;仿真平台DOIDOI:10.11907/rjdk.143483中图分类号:TP319文献标识码:A 文章编号文章编号:16727800(2015)0010103020 引言在飞机系统设计初期,工程模拟器可用于飞行控制律、飞行控制系统功能的初步设计与验证;在系统详细设计阶段,工程模拟器可用于飞行控制律的详细设计与验证、飞行品质的评估、飞行控制系统功能的详细设计与验证等;在系统设计后期,工程模拟器可用于驾驶员在环试验、部分适航符合性试验、系统功能危害性试验以及机组培训等,视实际用途的不同,飞机工程模拟器有带运动系系统和不带运动系统的。
具有一定自由度的带运动平台模拟器,不仅为飞行员和操纵者提供了飞行控制环境,还提供了飞机对人员操纵响应过程的加速度、速度和位置等运动感觉。
因此,更有利于飞行体验,并提高对飞行品质评定结论的置信度。
本文将着重介绍带六自由度运动平台的工程模拟器设计,其效果见图1。
1 工程模拟器总体设计飞机工程模拟器[1]贯穿于飞机系统研制的各个阶段,提供飞机不同阶段的工程应用环境,同时为飞行员提供逼真的飞行环境。
工程模拟器具有人在回路的半实物仿真特点,具备以下功能:①工程试验的仿真与验证;②飞行员在环仿真验证;③机组初步培训;④支持飞机改型设计。
工程模拟器目前尚没有明确的标准,其设计可参照CCAR60 部的D 级飞行训练模拟器标准,亦可根据实际需要进行适当调整。
图1 工程模拟器设计2 工程模拟器总体设计2.1 整机组成飞机工程模拟器基本上由以下12个分系统[24]组成:①驾驶舱结构与驾驶舱设备仿真系统;②主飞行仿真系统;③航电仿真系统;④视景系统;⑤六自由度运动系统;⑥操纵负荷系统;⑦声音仿真系统;⑧综合控制台系统;⑨硬件接口系统;⑩计算机实时仿真及网络系统;B11工程师平台;B12环境与支持系统。
飞行模拟系统设计与分析
飞行模拟系统设计与分析近年来,随着航空业的快速发展,飞行模拟成为航空人才培养的重要工具。
飞行模拟可分为硬件模拟和软件模拟,本文主要讨论软件模拟方面的内容。
一、软件模拟的基本原理软件模拟指利用计算机软件模拟飞行过程,以达到培养飞行技能的目的。
软件模拟的基本原理是根据真实飞行过程的物理规律,建立数学模型,并在计算机中实现该数学模型。
在用户对计算机进行操作时,计算机程序对数学模型进行计算,根据数学模型的输出结果改变飞行模拟器的状态,反馈到用户的控制操作中,最终产生模拟飞行效果。
二、飞行模拟软件的设计飞行模拟软件的设计应该遵循以下原则:1.可扩展性:飞行模拟软件应该能够根据用户需要进行扩展,支持更多的飞机类型和场景环境。
2.良好的用户交互界面:飞行模拟软件是为用户提供培养飞行技能的工具,交互界面应该简单明了,易于操作。
3.高度逼真的模拟效果:飞行模拟软件应该基于较为真实的物理模型进行模拟,输出结果要逼真可靠,具有参考价值。
4.高性能:飞行模拟软件应该支持较高分辨率的图形显示,同时具有高效的运算能力,以达到流畅的模拟效果。
三、飞行模拟软件的实现技术1.三维图形渲染技术:三维图形渲染技术是实现逼真模拟效果的重要技术手段,常用的渲染技术包括纹理、透视投影、光影等。
2.物理引擎技术:物理引擎是模拟飞行过程中物理规律的计算核心,包括运动学和动力学计算。
3.数据库技术:飞行模拟软件需要支持多种场景环境和飞机类型,需要进行相关数据的存储管理,数据库技术是常用的实现数据管理和查询的工具。
四、飞行模拟软件的评价指标1.模拟精度:模拟结果与真实飞行过程的误差程度。
2.模拟稳定性:模拟软件运行时的稳定性和效率。
3.用户体验:用户在使用模拟软件时的操作感受和培训效果。
4.可扩展性:模拟软件对新机型和新场景的支持能力。
五、未来发展趋势随着虚拟现实技术的发展,飞行模拟软件的发展将逐步向三维虚拟现实技术和人机交互技术方向发展,更加真实地模拟飞行过程和飞行环境。
高速数据采集系统设计_张俊杰

高速数据采集系统设计张俊杰,章凤麟,叶家骏(上海大学特种光纤与光接入网教育部重点实验室,上海 200072)摘 要:为满足雷达信号采集的要求,设计一个12 bit 100 MS/s 的基于PCI 总线的数据采集系统。
该系统能够实现6 GB 数据的实时采集与存储。
可编程逻辑器件控制数据的采集、存储与传输。
PCI 数据传输采用PCI 主模式,传输速率达到60 MB/s ,采集信号的信噪比达到55 dB(30 MHz 模拟信号)。
关键词:PCI 控制器;可编程器件;抖动;信噪比Design of High Speed Data Acquisition SystemZHANG Jun-jie, ZHANG Feng-lin, YE Jia-jun(Key Laboratory of Special Fiber Optics and Optical Access Networks, Ministry of Education, Shanghai University, Shanghai 200072)【Abstract 】A 100 MS/s data acquisition system based on PCI bus is designed to meet the need of high-speed radar signal sampling. The 6 GB sampling ADC data can be saved on this card and transferred to the computer simultaneously, which is controlled by one FPGA chip. The transfer rate between this card and the computer can reach up 60 MB/s. The SNR of the sampled data can reach 55 dB at 30 MHz. 【Key words 】PCI controller; FPGA; jitter; SNR计 算 机 工 程Computer Engineering 第35卷 第1期V ol.35 No.1 2009年1月January 2009·工程应用技术与实现·文章编号:1000—3428(2009)01—0207—03文献标识码:A中图分类号:TP274.21 概述随着通信、雷达等领域的快速发展,需要处理的模拟信号带宽以及动态范围越来越大,对模数转换器的采样速度与精度要求也越来越高。
航空航天工程师的数据分析和模拟仿真
航空航天工程师的数据分析和模拟仿真航空航天工程师是指从事航空航天科学研究和工程技术实践的专业人士。
在现代航空航天领域,数据分析和模拟仿真技术已经成为航空航天工程师不可或缺的核心能力。
本文将就航空航天工程师在数据分析和模拟仿真方面的重要性、应用场景以及发展趋势进行探讨。
一、数据分析在航空航天工程中的重要性数据分析是指通过收集、整理、描述并解释数据以发现其中蕴含的信息和规律的过程。
在航空航天工程领域,大量的传感器和监测设备产生的数据是无法直接理解和利用的,需要航空航天工程师运用数据分析技术进行处理。
首先,数据分析能够帮助航空航天工程师掌握飞行器的性能和状态。
通过对传感器数据的分析,可以准确评估飞行器的性能指标,并监测其健康状况,进而指导维护和改进工作。
其次,数据分析能够提供决策支持。
航空航天工程师需要根据大量的数据来做出决策,如发动机参数调整、飞行器路线规划等。
通过数据分析,工程师可以获取决策所需的关键信息,从而提高决策的准确性和有效性。
最后,数据分析有助于航空航天工程师进行故障诊断和预测。
通过对传感器数据的分析,可以快速发现异常情况,并及时做出反应,避免事故的发生。
同时,通过对历史数据的分析,还可以预测可能出现的故障,并采取相应的措施进行预防。
二、模拟仿真在航空航天工程中的应用场景模拟仿真是指通过建立数学模型和计算模型,模拟航空航天系统的行为和性能的过程。
在航空航天工程领域,模拟仿真技术具有重要的应用价值。
首先,模拟仿真可以用于飞行器设计和优化。
通过建立飞行器的数学模型,工程师可以模拟飞行器在不同工况下的性能表现,进而指导设计优化。
例如,可以通过模拟仿真来评估飞行器的气动特性、结构强度等,以确保其安全可靠。
其次,模拟仿真可以用于飞行器的飞行测试。
在实际的飞行测试之前,航空航天工程师可以通过模拟仿真对飞行器的性能进行评估和验证。
这样可以减少实际测试的风险和成本,并提高测试的效率。
最后,模拟仿真可以用于航空航天系统的优化和调度。
工程机械模拟器设计方案
工程机械模拟器设计方案一、引言工程机械模拟器是一种以工程机械操作为主题、以模拟技术为手段的仿真设备。
它可以帮助操作员进行模拟训练和操作实践,提高其操作技能和应急能力,降低操作事故和设备损坏的风险。
本文将围绕工程机械模拟器的设计方案展开讨论,包括模拟器的功能要求、结构设计、运动控制、虚拟环境建模等内容。
二、功能要求1. 模拟真实操作环境:包括模拟真实的工程机械操作场景、声光效果以及工程机械的操作感觉。
2. 多种机械设备模拟:能够模拟多种不同类型的工程机械设备,包括挖掘机、推土机、压路机等。
3. 操作界面友好:操作界面设计合理,操作控制器易于操作,具有良好的用户体验。
4. 操作参数可调:可以根据不同的操作需求,调整操作参数,包括操作难度、机械设备参数等。
5. 数据采集与分析:能够采集模拟训练中操作员的操作数据,并进行分析,为操作员提供指导。
6. 多种场景模拟:能够模拟多种不同的操作场景,包括道路施工、土方工程、建筑工地等。
7. 演练模式:提供多种演练模式,包括基础练习、实战模拟、应急演练等。
8. 安全保障:能够在模拟训练时及时发现并纠正错误操作,提高操作员的安全意识。
三、结构设计1. 操作模块:包括操作台、操纵杆、踏板等,能够模拟真实机械设备的操控方式。
2. 显示器:提供模拟场景的显示和交互,为操作员提供视觉体验。
3. 音响系统:模拟真实的声光效果,提高操作场景的真实感。
4. 控制系统:包括传感器、运动控制器等,为模拟器提供输入输出控制和运动控制。
5. 动力系统:包括模拟机械设备的动力传动装置,实现机械设备的真实感模拟。
6. 结构框架:包括模拟器的外部结构框架和内部支撑结构,确保模拟器的稳定性和安全性。
四、运动控制1. 运动控制算法:采用先进的运动控制算法,实现机械设备的稳定运动和真实感模拟。
2. 传感器系统:采用高精度的传感器系统,实时监测模拟器的运动状态和操作员的操作动作。
3. 运动模拟软件:结合运动控制算法和传感器系统,开发运动模拟软件,实现机械设备的精确、平稳的运动模拟。
高速多通道数据采集传输系统的设计
高速多通道数据采集传输系统的设计*赵忠凯,尹达,刘海朝【摘要】摘要:设计了一种基于FPGA与DSP的高速多通道实时数据采集传输系统。
该系统通过FPGA实现对时钟、ADC、DSP等芯片的功能配置,采集数据由FPGA预处理后通过EMIF接口传送至DSP,并完成后续的复杂信号处理。
该系统最高数据采集速率可达500 MSPS,FPGA与DSP之间可实现高速率的数据传输。
实际测试结果表明,该系统实现了多通道数据的实时同步采集、传输与处理,数据采集达到较高性能,能够满足当前复杂电磁环境下精确制导雷达数据处理分析的需求。
【期刊名称】火力与指挥控制【年(卷),期】2015(000)012【总页数】5【关键词】多通道,高速数据采集,EMIF,FPGA&DSP0 引言当前电磁信号环境越来越复杂,电磁信号密度已达到百万量级[1],这就要求雷达信号识别处理系统必须具备快速、准确识别威胁的能力,能够为之后作战提供及时可靠的信息。
随着一些新算法的出现,信号处理复杂度越来越高,动态范围也要求越来越大,信号的通道数也越来越多,因此,多通道信号的采集处理已成为当前雷达数字接收机的发展趋势。
传统的信号采集和传输方法已不能完全满足当前复杂电磁威胁环境下信号处理机对处理数据的要求[2],必须应用更精确更高速的采集系统,保证电子战环境中的主动权,所以对雷达信号高速多通道采集传输系统的研究具有重大且深远的意义。
FPGA具有强大的数据并行处理能力,能够满足高速ADC的数据处理要求,非常适合作为本系统的逻辑控制核心。
高性能多核DSP的高速运算能力使其适合选作复杂算法的主处理芯片[3]。
1 系统总体方案雷达信号高速多通道数据采集传输系统总体框图如图1所示。
设计中所选用的ADC芯片数据转换速率最高可达500 MSPS。
FPGA芯片选择Altera公司Stratix III系列的EP3SL200F1152C2,DSP芯片选择TI公司的TMS320C6678。
航空行业飞行训练与模拟系统建设方案
航空行业飞行训练与模拟系统建设方案第一章引言 (3)1.1 航空行业发展概述 (3)1.2 飞行训练与模拟系统的重要性 (3)第二章飞行训练与模拟系统概述 (3)2.1 飞行训练与模拟系统的定义 (3)2.2 系统分类与功能 (4)2.2.1 系统分类 (4)2.2.2 功能 (4)2.3 发展趋势 (4)第三章飞行训练与模拟系统需求分析 (5)3.1 训练需求分析 (5)3.2 技术需求分析 (5)3.3 法规与标准需求 (5)第四章飞行模拟器设计 (6)4.1 模拟器硬件设计 (6)4.2 模拟器软件设计 (6)4.3 模拟器功能指标 (7)第五章飞行训练与模拟系统建设方案 (7)5.1 系统架构设计 (7)5.2 设备选型与配置 (8)5.3 系统集成与调试 (8)第六章飞行训练与模拟系统关键技术 (9)6.1 飞行模拟技术 (9)6.1.1 模拟器硬件设计 (9)6.1.2 模拟器软件设计 (9)6.1.3 模拟器功能评估 (9)6.2 训练评估技术 (9)6.2.1 训练数据采集 (9)6.2.2 训练评估指标体系 (9)6.2.3 训练评估方法 (10)6.3 数据处理与分析技术 (10)6.3.1 数据清洗与预处理 (10)6.3.2 数据挖掘与分析 (10)6.3.3 数据可视化 (10)6.3.4 数据安全与隐私保护 (10)第七章飞行训练与模拟系统实施与管理 (10)7.1 实施流程 (10)7.1.1 项目启动 (10)7.1.2 需求分析 (10)7.1.3 设计阶段 (10)7.1.4 开发与测试 (11)7.1.5 系统部署与培训 (11)7.1.6 运维与维护 (11)7.2 项目管理 (11)7.2.1 项目组织结构 (11)7.2.2 项目进度控制 (11)7.2.3 质量管理 (11)7.2.4 成本控制 (11)7.3 风险控制 (11)7.3.1 风险识别 (11)7.3.2 风险评估 (12)7.3.3 风险应对 (12)7.3.4 风险监控 (12)第八章飞行训练与模拟系统培训与认证 (12)8.1 培训体系建设 (12)8.1.1 培训目标 (12)8.1.2 培训内容 (12)8.1.3 培训方式 (13)8.2 认证与评估 (13)8.2.1 认证体系 (13)8.2.2 认证流程 (13)8.2.3 评估体系 (13)8.3 师资队伍建设 (14)8.3.1 师资队伍结构 (14)8.3.2 师资队伍选拔与培训 (14)8.3.3 师资队伍管理 (14)第九章飞行训练与模拟系统运营与维护 (14)9.1 运营模式 (14)9.1.1 运营目标 (14)9.1.2 运营主体 (14)9.1.3 运营策略 (14)9.2 维护保养 (15)9.2.1 维护保养制度 (15)9.2.2 维护保养人员 (15)9.2.3 维护保养流程 (15)9.3 安全管理 (15)9.3.1 安全管理制度 (15)9.3.2 安全风险防控 (15)9.3.3 应急处理 (16)第十章未来发展展望 (16)10.1 技术创新 (16)10.2 市场前景 (16)10.3 国际合作与交流 (16)第一章引言1.1 航空行业发展概述航空产业作为国家重要的战略性产业,近年来在我国得到了快速发展。
飞机飞行安全实时监控关键技术研究

背景
飞机飞行安全实时监控关键技术的研究始于20世纪90年代,当时主要集中在 军事领域。随着民用航空的发展,飞行安全问题日益凸显。传统的飞行安全监控 方法主要依靠飞行员的直觉和经验,但在复杂的环境和恶劣的天气条件下,这种 方式存在一定的局限性。因此,飞机飞行安全实时监控关键技术逐渐受到各国研 究机构的。
二、关键技术研究
在构建面向内容的网络安全监控模型时,需要用到许多关键技术,包括数据 流分析技术、模式识别技术、机器学习技术等。下面我们将对其中几种关键技术 进行详细介绍。
1、数据流分析技术:该技术主要用于处理和分析大规模的网络流量数据。 通过使用高效的数据流分析算法,能够实时地检测出异常流量和潜在的攻击行为。
四、研究结果与分析
通过本次研究,我们获得了以下成果:
1、深入研究了飞行模拟器动感模拟技术的关键技术和实现方法,包括高精 度算法、实时仿真等。
2、针对现有飞行模拟器的应用情况进行了实地调查,总结出了其在应用过 程中存在的问题和不足之处。
3、通过实验研究,验证了本课题所提出的关键技术和实现方法的有效性和 优越性。具体来说,我们通过对比实验,发现采用本课题所提出的关键技术的飞 行模拟器在仿真精度、实时性等方面均优于现有的飞行模拟器。
3、仿真技术:通过仿真技术,将飞行器的操纵和运动轨迹实时地反映到模 拟器上,以提供更加逼真的飞行体验。
二、需求分析
随着航空技术的不断发展,飞行模拟器动感模拟技术在军事、民用等领域的 需求也不断增加。目前,该技术的研究现状和发展趋势主要体现在以下几个方面:
1、关键技术研究:针对飞行模拟器动感模拟技术的关键技术研究,如高精 度算法、实时仿真等,已经成为研究热点。
飞机飞行安全实时监控关键技 术研究
01 背景
5 Gsps高速数据采集系统的设计与实现
5 Gsps 高速数据采集系统的设计与实现摘要:以某高速实时频谱仪为应用背景,论述了5 Gsps 采样率的高速数据采集系统的构成和设计要点,着重分析了采集系统的关键部分高速ADC(analog to digital,模数转换器)的设计、系统采样时钟设计、模数混合信号完整性设计、电磁兼容性设计和基于总线和接口标准(PCI Express)的数据传输和处理软件设计。
在实现了系统硬件的基础上,采用Xilinx 公司ISE 软件的在线逻辑分析仪(ChipScope Pro)测试了ADC 和采样时钟的性能,实测表明整体指标达到设计要求。
给出上位机对采集数据进行处理的结果,表明系统实现了数据的实时采集存储功能。
关键词:高速数据采集;高速ADC;FPGA;PCI Express 高速实时频谱仪是对实时采集的数据进行频谱分析,要达到这样的目的,对数据采集系统的采样精度、采样率和存储量等指标提出了更高的要求。
而在高速数据采集系统中,ADC 在很大程度上决定了系统的整体性能,而它们的性能又受到时钟质量的影响。
为满足系统对高速ADC 采样精度、采样率的要求,本设计中提出一种新的解决方案,采用型号为EV8AQ160 的高速ADC 对数据进行采样;考虑到ADC 对高质量、低抖动、低相位噪声的采样时钟的要求,采用AD9520 为5 Gsps 数据采集系统提供采样时钟。
为保证系统的稳定性,对模数混合信号完整性和电磁兼容性进行了分析。
对ADC 和时钟性能进行测试,并给出上位机数据显示结果,实测表明该系统实现了数据的高速采集、存储和实时后处理。
1 系统的构成高速数据采集系统主要包括模拟信号调理电路、高速ADC、高速时钟电路、大容量数据缓存、系统时序及控制逻辑电路和计算机接口电路等。
图1 所示为5 Gsps 高速数据采集系统的原理框图。
所用ADC 型号为EV8AQ160,8 bit 采样精度,内部集成4 路ADC,最高采样率达5 Gsps,可以工作在多种模式下。
飞行训练模拟器数据采集系统设计
教练机2019.NO.40引言随着飞机的性能指标、任务要求、系统集成等要求的提高,与之配套的高仿真模拟器变得越来越复杂,需要实时采集与处理的数据越来越多,种类越来越繁杂[1-2]。
飞行训练模拟器数据采集系统是飞行训练模拟器座舱模拟分系统的重要组成部分,是整个飞行训练模拟器中的一项关键技术。
数据采集系统主要实现对模拟器座舱电气设备的数据采集,将采集的数据通过以太网发送至飞机仿真软件、座舱测试软件,同时获取飞机仿真软件、座舱测试软件的网络数据,将控制盒显示数据发送至模拟器座舱总线上的控制盒。
数据采集系统由硬件和软件两个部分组成,硬件提供数据采集系统运行的平台,软件驱动数据采集系统功能实现[3]。
1系统概述1.1硬件概述数据采集系统的硬件包括主控制器、DI 模块、AI 模块、CAN 总线模块。
数据采集硬件各部件的功能如下:1)主控制器:主控制器是数据采集硬件的核心部件,主要实现DI 模块数据和AI 模块数据的接收、CAN 总线数据的收发,以及以太网数据收发功能,完成数据的实时采集、计算和通讯任务;2)DI 模块:主要实现对模拟器座舱内油门杆、操纵杆开关数字信号的采集功能;3)AI 模块:主要实现对模拟器座舱内油门杆、操纵杆传感器模拟信号的采集功能;4)CAN 总线模块:主要实现对模拟器座舱内控飞行训练模拟器数据采集系统设计应艳茹,杨宛璐,韩立,王建普(航空工业洪都,江西南昌,330024)摘要院详细介绍了数据采集系统的硬件概述、软件概述、系统体系结构、接口设计和几个主要功能模块的具体设计过程,将系统可变部分写入配置文件中,不可变部分通过代码提供通用接口,实现了软件的通用性和可扩展性。
关键词:飞行模拟器;数据采集;配置文件;接口Design of Data Acquisition System for Flight Training SimulatorYing Yanru,Yang Wanlu,Han Li,Wang Jianpu (AVIC Hongdu ,Jiangxi Nanchang,330024)Abstract :This paper gives a detailed introduction about the data acquisition system,including the hardware overview,software overview,system architecture,interface design and the specific design process of several main functional modules,writes the variable part of system into the configuration file,and provides the in -variable parts with universal interface through the code,which realizes the universality and expansibility of the software.Key words:Flight simulator;Data acquisition;Configuration file;Interface66教练机2019.NO.4制盒总线数据的采集和发送功能。
飞行模拟器仪表改装设计

飞行模拟器仪表改装设计摘要:本文对飞行模拟器仪表改装的中用到的各种驱动方式进行了介绍,并详细分析了步进电机驱动方式的硬件电路设计以及单片机程序设计以及在调试过程中出现的问题和解决方法。
关键词:仪表改装电流计直流伺服步进电机驱动RS-422总线1 引言飞行模拟器上的仪表是飞机性能参数和导航参数显示的窗口,是给飞行员提供座舱内的视觉信息,因此在飞行模拟器中,飞行仪表仿真是十分重要的,它必须提供在功能上和外观上与真飞机尽可能相同的各类仪表,将飞行参数、导航参数、电气系统参数、发动机参数等实时显示并提供给驾驶员和研究人员,以满足飞行训练或工程研究的需要。
飞行模拟器上的仪表,按仿真方法可分为三类:(1)直接引用仪表;(2)改装仪表;(3)计算机实时图形仿真仪表;凡与传感器合为一体的仪表或模拟式计算机控制的仪表,一般需改装后使用,属改装仪表改装仪表按其结构及驱动方式可分为直流伺服电机驱动仪表、电流计式仪表、步进电机驱动仪表等,各种驱动方式有不同的特点,需根据实际要求进行选择。
2 电流计式仪表电流计结构简单,控制方便,仅需要一个电压信号即可驱动。
电流计式仪表的控制电路也非常简单。
由于仪表与接口系统采用RS-422总线进行数据传输,所以驱动电路使用单片机控制数据接收和数模转换。
单片机通过差分芯片接收RS-422总线数据,完成数据转换后通过数模转换芯片将数据转换成相应的电压信号驱动流比计。
流比计仪表结构简单,成本低,但精度较差,仅适用于精度要求不高的仪表。
3 直流伺服驱动系统直流伺服驱动系统,即直流电机加电位器,直流伺服电机驱动仪表采用单圈电位计测量电机转角,精度高,成本低。
控制电路的基本原理是将与电机联动的电位器所反馈的电压信号与控制信号叠加后经过放大对电机进行控制,这种控制方式只需要接口提供一个电压控制信号。
但要根据每块表机械传动部分运动特性以及阻尼的不同调整放大电路的增益。
直流伺服系统调整好之后动态特性和跟随性比较好,但电路容易出现自激振动。
基于FT2232H的高速数据采集系统设计_王曙
FTDI推 出 的 第 5 代 USB-to-UART/FIFO IC 支 持 480 Mb/s USB 2.0 的 高 速 规 范,并 可 在 各 种 工 业 标 准 的 串 行 或 并 行 接 口 (例 如 UART 或 FIFO)下 进 行 配 置。 FT2232H 提供 两 种 可 配 置 的 接 口,均 可 配 置 为 UART、 JTAG、SPI、I2 C 总 线 或 带 独 立 波 特 率 发 生 器 的 位 响 应 模 式串口。内部集成了 USB 协议引 擎(可 以 控 制 UTMI,处 理 USB 2.0高速接口的各个方面),并 且 集 成 了 整 个 USB 协议。
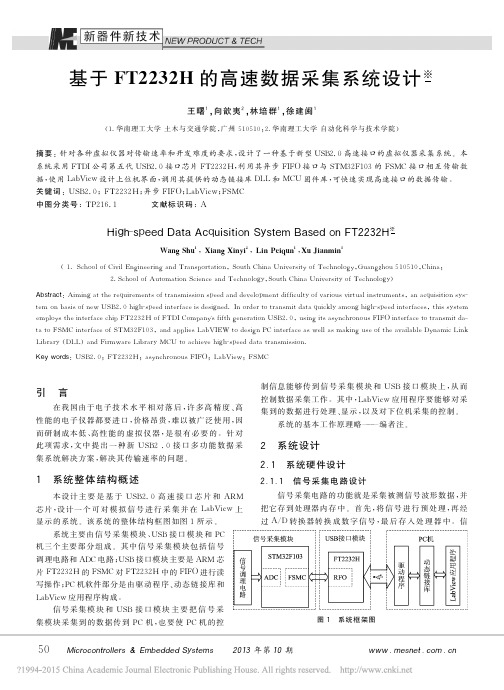
摘 要:针对各种虚拟仪器对传输速率和开发难度的要求,设计了一种基于新型 USB2.0高速接口的虚拟仪器采集系统。本 系统采用 FTDI公司第五代 USB2.0接口芯片 FT2232H,利用其异步 FIFO 接口与 STM32F103的 FSMC 接 口 相 互 传 输 数 据,使用 LabView 设计上位机界面,调用其提供的动态链接库 DLL和 MCU 固件库,可快速实现高速接口的数据传输。 关键词:USB2.0;FT2232H;异步 FIFO;LabView;FSMC 中 图 分 类 号 :TP216.1 文 献 标 识 码 :A
信号采集 模 块 和 USB 接 口 模 块 主 要 把 信 号 采 集模块 采 集 到 的 数 据 传 到 PC 机,也 要 使 PC 机 的 控
制信息能够传 到 信 号 采 集 模 块 和 USB 接 口 模 块 上,从 而 控制数据采集工作 。其中,LabView 应用程序要能够 对 采 集到的数据进行处理 、显示,以及对下位机采集的控制 。
针对异步 FIFO 时 序 要 求,定 义 读 写 地 址 为 (uint32_ t)(0x60000000),利用 ST 提 供 的 固 件 库 进 行 主 要 初 始 化 操作如下: FSMC_NORSRAMInitTypeDef FSMC_InitStruc; //定 义 初 始 化 数 据 结 构 体 FSMC_NORSRAMTimingInitTypeDefp; //定 义 初 始 化 时 间 参 数 结 构 体 //读写 FIFO 时序的定义,时间设置查看 FT2232H DataSheet p.FSMC_AddressSetupTime=0×1; p.FSMC_AddressHoldTime=0×0; p.FSMC_DataSetupTime=0×01; p.FSMC_BusTurnAroundDuration = 0; p.FSMC_CLKDivision=0; p.FSMC_DataLatency=0; p.FSMC_AccessMode=FSMC_AccessMode_A; /*与 FSMC 相关数据寄存器配置*/ FSMC_InitStruc.FSMC_Bank = FSMC_Bank1_NORSRAM1;
一种高速实时数据采集系统的设计与实现

计无误。( 2) 使用 Driver Wizard 产生驱动程序代码。包 括: 应用程序级 API 函数、用上述 API 函数操作硬件的 样本应用程序以 及 对 应 于 Windriver 所 支 持 的 操 作 系 统的工程文件。( 3) 编译与运行。使用 Driver Wizard 为 编译器产生工程文件, 编译、运行此样本程序 , 最后修 改样本程序以适合需要。
CY7C4275 容量为 32 K×18 bit, 可异步、同步两种方 式 读 写 , 并 且 有 独 立 的 读 、写 时 钟 信 号 RCLK, WCLK。 数据的输入由写使能( WEN#) 和写时钟( WCLK) 控制, 输出由读使能( REN#) 和读时钟( RCLK) 控制, 读、写时 钟为上升沿时, 完成数据写入和读出。该芯片具有两个
该系统设计中设置 PCI 9054 工作于 C 模式, 数据 传输采用直接数据访问( DMA) 技术。通过对 NVRAM 地 址 单 元 的 设 置 , 将 PCI 9054 设 置 为 主 控 方 式 , 即 9054 通过 FIFO 接口启动 PCI 周期, 给定源/目标地址 和待传输字节数, 数据块便在外加接口和 PCI 总线之 间传输。 2.2 FIFO 缓存器
由于 PCI 9054 内部的 FIFO 只有 32 级深度, 实时 传 送 高 速 图 像 数 据 时 , PCI 9054 的 内 部 FIFO 会 很 快 存满, 而外界的数据仍会源源不断地传送过来, 可能会 造成数据的丢失和覆盖, 因此必须扩展外部 FIFO。该 系统选用 CY7C4275 来扩展系统的 FIFO, 接受来自前 端处理机采集的数据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
台上提出更高的仿真精度需求 ,包括 以 1 ms 仿真周期完成飞行仿真模型 的实 时解算 ,同时采集与存储 5 0 0 0个仿真实验数 据的需求。实验结果表 明,采用紧凑采集及选择采集 2 种 实时数据采 集算法和乒乓 缓存存储 算法 , 可解决毫秒级仿真周期、 海量数据的高速实时数据采集与存储 。 关健 词 :工程飞行模拟器 ;数据采集 ;数据存储 ;选择采集 ;乒乓缓存 ;紧凑技术
Y U J i - c ha o, SH EN We i - qun, ZO U Yu- f an g ( De p a r t me n t o f Au t o ma t i o n S c i e n c e& El e c t r i c a l E n g i n e e r i n g ,
【 Ke y w o r d s 】e n g i n e e r i n g a i r c r a f t s i mu l a t o r ;d a t a a c q u i s i t i o n ;d a t a s t o r a g e ;c h o o s e a c q u i s i t i o n ; p i n g ・ p a n g c a c h e ;c o mp a c t
B e i j i n g U n i v e r s i t y o f Ae r o n a u t i c s a n d As t r o n a u t i c s , B e i j i n g 1 0 0 1 9 1 , C h i n a )
[ A b s t r a c t ]I n o r d e r t o ma k e t h e f u n c t i o n a l i t y a n d p e r f o r ma n c e t e s t o f a l l p a r t s o f t h e n e w p l a n e s a c c u r a t e , a n d g i v e a s s i s t a n c e t o
t h e d e s i g n e r s t o ma x i mi z e t h e t e s t o f e a c h mo me n t , t h e li f g h t s i mu l a t i o n p l a t f o r m p r o p o s e s d e ma n d wh i c h n e e d s h i g h e r s i mu l a t i o n a c c u r a c y .I t i n c l u d e s c o mp l e t i n g t h e r e a l — t i me s o l v e r o f li f g h t s i mu l a t i o n mo d e l ,s i mu l t a n e o u s l y c o l l e c t i n g a n d s t o r i n g 5 0 0 0 s i mu l a t i o n d a t a i n 1 ms s i mu l a t i o n c y c l e . Th i s wo r k i n t r o d u c e s p i n g — p a n g c a c h e s t o r a g e a l g o r i t h m a n d t wo k i n d s o f r e a l — t i me d a t a a c q u i s i t i o n a l g o r i t h m wh i c h a r e c o mp a c t a c q u i s i t i o n a n d c h o o s e a c q u i s i t i o n .An d i n t h i s wo r k ,t h e mi l l i s e c o n d l e v e l s i mu l a t i o n c y c l e s , h u g e a mo u n t s o f h i g h — s p e e d r e a l — t i me d a t a a c q u i s i t i o n a n d s t o r a g e i s s o l v e d . .
文 献标识 程 飞行 模 拟 器 的 高速 实 时数据 采 集 系统设 计
于继超 ,沈为群 ,邹昱芳
( 北京航空航天大学 自动化科学与 电气工程 学院,北京 1 0 0 1 9 1 )
摘
要 :为对新机各分部件功能及性能 的测 试做到准确无误 ,需要协 助设计 人员最大 化地 测试 每一 个瞬间 , 在 飞行仿 真平
第3 9卷 第 5期
V_ O l _ 3 9 N o. 5
计
算
机
工
程
2 0 1 3年 5月
Ma y 2 01 3
Co mp u t e r En g i n e e r i n g
・ 开发研究 与工程应用 ・
文 章编号:1 0 0 0 — 一 3 4 2 8 ( 2 0 1 3 ) 0 5 — _ _ 0 2 9 7 — _ _ 0 4
Hi g h- ・ s pe e d Re a l - - t i me Da t a Ac qui s i t i o n Sy s t e m De s i g n o f
En n g i l n e e r i l n 2 g Ai r c r a f I t S i mu l a t o r