R16 Camera模组选型
Xvision X2R16N 16通道H.265 NVR产品说明书

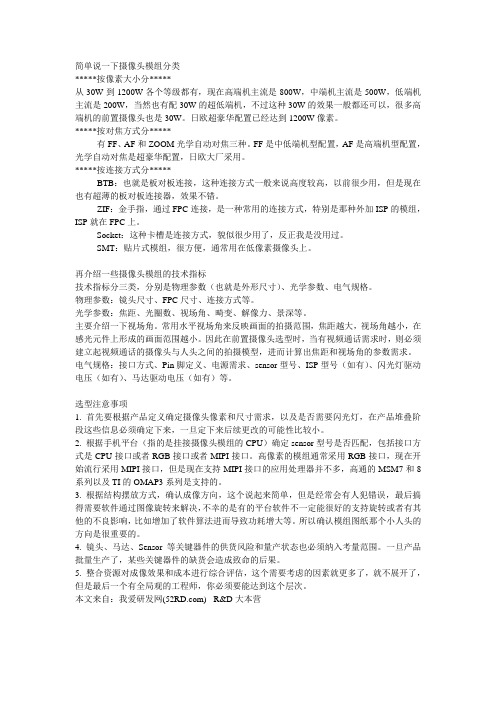
X2R16N-12TB X2R16N-1TB X2R16N-2TB X2R16N-3TB X2R16N-4TB X2R16N-6TB X2R16N-8TBProfessional 16 Camera HD-IP 5MP H264 NVRX2R16NVersion 1Full HD 1080P Real-Time Recording Pentaplex OperationUSB/Network BackupHDMI & VGA Monitor Output16 PoE Ports for Direct ConnectionP2P Remote Access via Smartphone, Tablet, PC & MacPRO IPHDFeaturesThe Xvision X2R16N 16 Channel H.265 NVR o ers the very latest in digital recording. The unit can record up to 5 Megapixel Super High De nition images. It has an built-in 16-port PoE switch to allow simple direct connection to the cameras o ering either auto or manual allocation of IP addresses for the connected cameras.The NVR provides a full HD 1080P monitor output via VGA or HDMI and can be controlled from the front panel touch sensitive controls or by supplied remote control or USB mouse. The NVR uses P2P technology for quick, seamless Network connectivity and is supplied with a dedicated Smartphone/Tablet App that can also receive Push Video alerts, showing alarms detected by Video Motion Detection. The NVR has a simple back-up procedure via USB or Network and is fully ONVIF compliant. Technical Speci cationsBrand XVISION Model Number X2R16N IP Camera Support ONVIF, Xvision PRO-HD Compression H264 / H265Recording Resolution 1080P (1920x1080) / 720P (1280x720) / D1 (704x576) Recording Bandwidth200Mbps D1: 16 Channel Real-Time, 720P : 12 Channel Real-Time, 1080P : 6 Channel Real-Time Live/PlaybackVideo Output 1x HDMI, 1x VGA Bit Rate 32-8192kbps Recording ModeContinuous / Manual / Motion Detection / Sensor / Alarm Alarm Input / OutputAutomatic Electronic Shutter Display Resolution 1920x1080, 1280x1024, 1440x900, 1280x720, 1024x768Ethernet RJ45 Port (1000M)Mobile AppiPhone, iPad, Android, Tablet - XIQ Mobile CMS USB1x 3.0 USB for backup/upgrade, 2x 2.0 USB for Mouse Max. Hard Drive Supported 2x 6TB (12TB Total)Controls USB Mouse, Remote Control PoE Ports 16e-Sata Optional ONVIF ONVIF Version 2.0 Power Supply NVR : DC 20V 190W PoE Switch : DC48V Dimension (WxHxD) mm 380x50x340X2R16N8 CH Input / 1 CH Output All speci cations shown are subject to change without notice, please con rm up-to-date details when ordering. All network speci cations and recording times are based upon theoretical scenarios. Actual performances will vary depending on external factors. No liability will be accepted by Y3K for any errors or omissions in this information. All relevant trade marks acknowledged. © Y3K (Europe) Limited 2015DISTRIBUTED BY1/4/8/16Display SplitX2R16N-12TB X2R16N-1TB X2R16N-2TB X2R16N-3TB X2R16N-4TB X2R16N-6TB X2R16N-8TB。
工业相机镜头地全参数及选型

工业相机镜头的参数与选型一、镜头主要参数1.焦距〔Focal Length〕焦距是从镜头的中心点到胶平面上所形成的清晰影像之间的距离。
焦距的大小决定着视角的大小,焦距数值小,视角大,所观察的*围也大;焦距数值大,视角小,观察*围小。
根据焦距能否调节,可分为定焦镜头和变焦镜头两大类。
2.光圈(Iris)用F表示,以镜头焦距f和通光孔径D的比值来衡量。
每个镜头上都标有最大F值,例如8mm/F1.4代表最大孔径为 5.7毫米。
F值越小,光圈越大,F值越大,光圈越小。
3.对应最大CCD尺寸(Sensor Size)镜头成像直径可覆盖的最大CCD芯片尺寸。
主要有:1/2″、2/3″、1″和1″以上。
4.接口(Mount)镜头与相机的连接方式。
常用的包括C、CS、F、V、T2、Leica、M42*1、M75*0.75等。
5.景深(Depth of Field,DOF)景深是指在被摄物体聚焦清楚后,在物体前后一定距离内,其影像仍然清晰的*围。
景深随镜头的光圈值、焦距、拍摄距离而变化。
光圈越大,景深越小;光圈越小、景深越大。
焦距越长,景深越小;焦距越短,景深越大。
距离拍摄体越近时,景深越小;距离拍摄体越远时,景深越大。
6.分辨率(Resolution)分辨率代表镜头记录物体细节的能力,以每毫米里面能够分辨黑白对线的数量为计量单位:"线对/毫米〞〔lp/mm〕。
分辨率越高的镜头成像越清晰。
7、工作距离(Working distance,WD)镜头第一个工作面到被测物体的距离。
8、视野*围(Field of View,FOV)相机实际拍到区域的尺寸。
9、光学放大倍数(Magnification,ß)CCD/FOV,即芯片尺寸除以视野*围。
10、数值孔径(Numerical Aperture,NA)数值孔径等于由物体与物镜间媒质的折射率n与物镜孔径角的一半〔a\2〕的正弦值的乘积,计算公式为N.A=n*sin a/2。
摄像头模组设计规范

摄像头模组设计规范 Document serial number【KK89K-LLS98YT-SS8CB-SSUT-SST108】章节号内容页数1 FPC/PCB布局设计22FPC/PCB线路设计53FPC/PCB工艺材质要求84模组包装设计91、FPC/PCB布局设计(1)普通定位孔直径=Holder定位柱尺寸+定位柱上公差+0.05mm,公差为+/-0.05mm。
如果把定位孔做成沉铜孔,则沉铜孔直径=Holder定位柱尺寸+定位柱上公差+0.05mm公差为+/-0.08mm。
(2)普通定位孔间距的公差为0.05mm;沉铜孔的间距公差为0.08mm。
(3)COB单片PCB板上必须有DIEBOND标识,压焊标识,且整版上必须有SMT标识;对于Socket结构的整版PCB,无论是CSP还是COB的都需要加防呆标识。
(4)PCB和FPC的贴片PAD与邦线PAD之间的走线距离要大于0.3mm,避免SMT贴片的时候锡膏回流到邦线PAD上去。
OK:Failed:(5)邦线PAD内边缘距离芯片0.1mm与0.35 mm之间,邦线PAD外边缘距离Holder在0.1mm以上。
(6)电容距离芯片和Holder内壁必须保证在0.1mm以上。
电容要靠近芯片滤波PAD。
(7)金手指连接的FPC需要把整个金手指开窗出来;对于双面金手指,顶层和底层一定要错开开窗,错开的距离保证在0.25mm以上。
(8)FPC银箔接地的开窗形状为椭圆形,且双面开窗的位置一定要错开,不允许有重合部分,错开距离保证在0.5mm以上。
对于受控图纸中表明FPC有弯折要求的,在样品的制作要求中必须标示弯折的位置和角度,并在技术标准明确的体现出来,禁止在弯折处开窗,对满足“几”字形特殊弯折要求的,必须标示出来。
(9)FPC压焊PAD下面不允许有网络。
OKFailed2、FPC/PCB线路设计为了能够让摄像头模组能够正常地工作,并且能够有效地预防EMC,EMI等问题,可以采取磁珠,电感,共模线圈进行隔离;加电容进行滤波,并四处铺铜,采用屏蔽地线、屏蔽平面来切断电磁的传导和辐射途径。
手机摄像头模组选型注意事项2
简单说一下摄像头模组分类*****按像素大小分*****从30W到1200W各个等级都有,现在高端机主流是800W,中端机主流是500W,低端机主流是200W,当然也有配30W的超低端机,不过这种30W的效果一般都还可以,很多高端机的前置摄像头也是30W。
日欧超豪华配置已经达到1200W像素。
*****按对焦方式分*****有FF、AF和ZOOM光学自动对焦三种。
FF是中低端机型配置,AF是高端机型配置,光学自动对焦是超豪华配置,日欧大厂采用。
*****按连接方式分*****BTB:也就是板对板连接,这种连接方式一般来说高度较高,以前很少用,但是现在也有超薄的板对板连接器,效果不错。
ZIF:金手指,通过FPC连接,是一种常用的连接方式,特别是那种外加ISP的模组,ISP就在FPC上。
Socket:这种卡槽是连接方式,貌似很少用了,反正我是没用过。
SMT:贴片式模组,很方便,通常用在低像素摄像头上。
再介绍一些摄像头模组的技术指标技术指标分三类,分别是物理参数(也就是外形尺寸)、光学参数、电气规格。
物理参数:镜头尺寸、FPC尺寸、连接方式等。
光学参数:焦距、光圈数、视场角、畸变、解像力、景深等。
主要介绍一下视场角。
常用水平视场角来反映画面的拍摄范围,焦距越大,视场角越小,在感光元件上形成的画面范围越小。
因此在前置摄像头选型时,当有视频通话需求时,则必须建立起视频通话的摄像头与人头之间的拍摄模型,进而计算出焦距和视场角的参数需求。
电气规格:接口方式、Pin脚定义、电源需求、sensor型号、ISP型号(如有)、闪光灯驱动电压(如有)、马达驱动电压(如有)等。
选型注意事项1. 首先要根据产品定义确定摄像头像素和尺寸需求,以及是否需要闪光灯,在产品堆叠阶段这些信息必须确定下来,一旦定下来后续更改的可能性比较小。
2. 根据手机平台(指的是挂接摄像头模组的CPU)确定sensor型号是否匹配,包括接口方式是CPU接口或者RGB接口或者MIPI接口。
camera 基础介绍

O(∩_∩)O谢谢
24色卡是专用测试色彩还原的标版,拍摄后的照片的色彩饱和度在100%130%的时候整体色彩最佳,而且每个色块的色偏越小越好
效果评测说明-色彩饱和度
红框内的值就是饱和度,100%-130%之间最适合人眼,这样不会使人眼产生 视觉疲劳
效果评测说明-白平衡
白平衡:在不同光源下,因色温不同,拍摄出来的照片会偏色。如中午时分拍照, 和夕阳时候拍照的俩种色调是不一样的,此时便需要利用白平衡功能来做修正, 使得在任何光源下拍摄一块白色物体都是白色,其他颜色也要求准确的还原。
上海斐讯数据通信技术有限公司 Camera 基础知识培训 朱铁 2014.6.9
目录
模组机构和组件
模组机构和组件
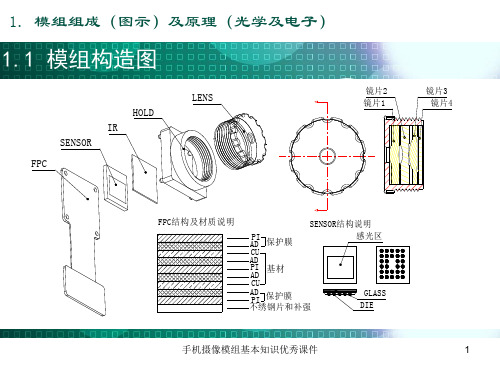
手机Camera 模组组成部件实物
手机摄像头模组由镜头(lens)、传感器(sensor)、电容、FPC板(Flexible Printed Circuity)、镜座(Lens holder)、连接器(connector)组成。
SNR (DB)
PASS >30
GOOD >35
效果评测说明-灰阶
灰阶:通常来说,液晶屏幕上人们肉眼所见的一个点,即一个像素,它是由红、 绿、蓝(RGB)三个子像素组成的。每一个子像素,其背后的光源都可以显现出不 同的亮度级别。而灰阶代表了由最暗到最亮之间不同亮度的层次级别。这中间层 级越多,所能够呈现的画面效果也就越细腻。
不同光源下拍 摄同样的场景
Sensor 白平衡的原理: 一般sensor的前端都 有R、G、B三种放大 器,通过控制这三种 颜色的放大比例达到 平衡
工业相机镜头地全参数与选型

工业相机镜头地全参数与选型工业相机镜头是工业自动化领域中重要的设备之一,广泛应用于机器视觉、智能检测、无损检测等领域。
在选购工业相机镜头时,需要考虑到相机的应用环境、被测物体的特性以及相机镜头的参数。
本文将介绍工业相机镜头的全参数并进行选型分析。
一、工业相机镜头的全参数1.焦距(Focal Length):焦距是镜头将光线聚焦的能力。
不同的焦距会影响镜头的视角和放大倍数。
一般来说,较长焦距的镜头具有较大的放大倍数和较小的视角,适合远距离拍摄;较短焦距的镜头具有较小的放大倍数和较大的视角,适合近距离大范围拍摄。
2.镜头结构(Lens Structure):镜头的结构包括透镜的数量和排列方式。
常见的结构有单透镜结构、双透镜结构、复合透镜结构等。
不同的结构会影响成像质量、畸变程度和成本。
3.光圈(Aperture):光圈控制着进入相机的光线量,它是一个由多个薄片组成的机械装置。
可以通过调节光圈的大小来控制曝光量和景深。
较大的光圈适合拍摄光线较暗的场景,提高曝光量;较小的光圈适合拍摄光线较亮的场景,提高景深。
4.最小对焦距离(Minimum Focus Distance):最小对焦距离是指物体与镜头的最小距离,也是相机能够聚焦的最小距离。
镜头的最小对焦距离直接影响镜头的应用范围,较小的最小对焦距离适合拍摄微小物体,较大的最小对焦距离适合拍摄大型物体。
5.最大光学放大倍率(Maximum Optical Magnification):最大光学放大倍率是镜头能够放大物体的倍数。
较大的光学放大倍率可以提高图像的清晰度和细节,适合拍摄对细节要求较高的场景。
6.视场角(Field of View):视场角是指从相机镜头看到的场景范围。
它受到镜头焦距、相机感光元件尺寸和被测物体距离的影响。
一般来说,较长焦距的镜头具有较小的视场角,较短焦距的镜头具有较大的视场角。
7.图像传感器尺寸(Image Sensor Size): 图像传感器尺寸是指相机感光元件的尺寸。
摄像头模组设计规范

文件属性系统文件版次/修订状态 A / 1 页次 2 /9 章节号内容页数1 FPC/PCB布局设计 22 FPC/PCB线路设计 53 FPC/PCB工艺材质要求84 模组包装设计91、FPC/PCB布局设计(1)普通定位孔直径=Holder定位柱尺寸+定位柱上公差+0.05mm,公差为+/-0。
05mm。
如果把定位孔做成沉铜孔,则沉铜孔直径=Holder定位柱尺寸+定位柱上公差+0。
05mm公差为+/—0。
08mm.(2)普通定位孔间距的公差为0。
05mm;沉铜孔的间距公差为0.08mm.(3)COB单片PCB板上必须有DIEBOND标识,压焊标识,且整版上必须有SMT标识;对于Socket结构的整版PCB,无论是CSP还是COB的都需要加防呆标识。
文件属性系统文件版次/修订状态 A / 1 页次 3 /9(4)PCB和FPC的贴片PAD与邦线PAD之间的走线距离要大于0。
3mm,避免SMT贴片的时候锡膏回流到邦线PAD上去。
OK:Failed:(5)邦线PAD内边缘距离芯片0。
1mm与0。
35 mm之间,邦线PAD外边缘距离Holder在0。
1mm以上。
(6)电容距离芯片和Holder内壁必须保证在0.1mm以上。
电容要靠近芯片滤波PAD。
(7)金手指连接的FPC需要把整个金手指开窗出来;对于双面金手指,顶层和底层一定要错开开窗,错开的距离保证在0。
25mm以上.文件属性系统文件版次/修订状态 A / 1 页次 4 /9(8)FPC银箔接地的开窗形状为椭圆形,且双面开窗的位置一定要错开,不允许有重合部分,错开距离保证在0。
5mm以上。
对于受控图纸中表明FPC有弯折要求的,在样品的制作要求中必须标示弯折的位置和角度,并在技术标准明确的体现出来,禁止在弯折处开窗,对满足“几”字形特殊弯折要求的,必须标示出来。
(9)FPC压焊PAD下面不允许有网络.OK Failed文件属性系统文件版次/修订状态 A / 1 页次 5 /92、FPC/PCB线路设计为了能够让摄像头模组能够正常地工作,并且能够有效地预防EMC,EMI等问题,可以采取磁珠,电感,共模线圈进行隔离;加电容进行滤波,并四处铺铜,采用屏蔽地线、屏蔽平面来切断电磁的传导和辐射途径。
手机照相模组镜头的选用基础知识
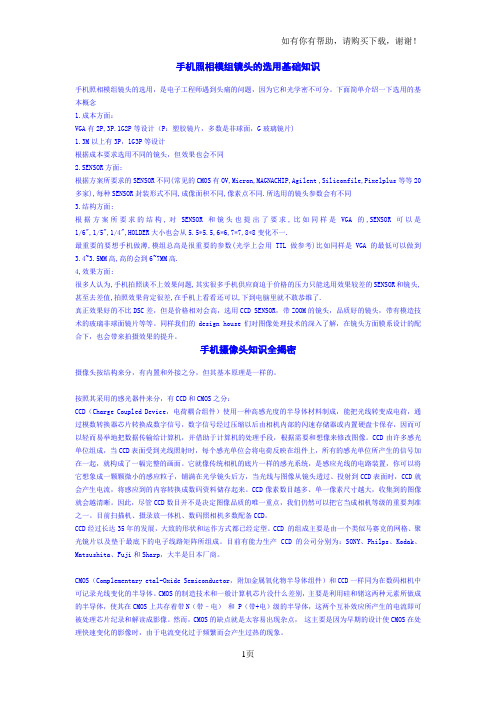
手机照相模组镜头的选用基础知识手机照相模组镜头的选用,是电子工程师遇到头痛的问题,因为它和光学密不可分。
下面简单介绍一下选用的基本概念1.成本方面:VGA有2P,3P.1G2P等设计(P:塑胶镜片,多数是非球面,G玻璃镜片)1.3M以上有3P,1G3P等设计根据成本要求选用不同的镜头,但效果也会不同2.SENSOR方面:根据方案所要求的SENSOR不同(常见的CMOS有OV,Micron,MAGNACHIP,Agilent ,Siliconfile,Pixelplus等等20多家),每种SENSOR封装形式不同,成像面积不同,像素点不同.所选用的镜头参数会有不同3.结构方面:根据方案所要求的结构,对SENSOR和镜头也提出了要求,比如同样是VGA的,SENSOR可以是1/6",1/5",1/4",HOLDER大小也会从5.5*5.5,6*6,7*7,8*8变化不一.最重要的要想手机做薄,模组总高是很重要的参数(光学上会用TTL做参考)比如同样是VGA的最低可以做到3.4~3.5MM高,高的会到6~7MM高.4,效果方面:很多人认为,手机拍照谈不上效果问题,其实很多手机供应商迫于价格的压力只能选用效果较差的SENSOR和镜头,甚至去差值,拍照效果肯定很差,在手机上看看还可以,下到电脑里就不敢恭维了.真正效果好的不比DSC差,但是价格相对会高,选用CCD SENSOR,带ZOOM的镜头,品质好的镜头,带有模造技术的玻璃非球面镜片等等。
同样我们的design house们对图像处理技术的深入了解,在镜头方面膜系设计的配合下,也会带来拍摄效果的提升。
手机摄像头知识全揭密摄像头按结构来分,有内置和外接之分,但其基本原理是一样的。
按照其采用的感光器件来分,有CCD和CMOS之分:CCD(Charge Coupled Device,电荷耦合组件)使用一种高感光度的半导体材料制成,能把光线转变成电荷,通过模数转换器芯片转换成数字信号,数字信号经过压缩以后由相机内部的闪速存储器或内置硬盘卡保存,因而可以轻而易举地把数据传输给计算机,并借助于计算机的处理手段,根据需要和想像来修改图像。
手机Camera-模组及VCM-与VCM-Driver-介绍

19
VCM Driver IC
• 要如何提供這微小的電流變化來控制VCM 來移動透鏡, 這就需要VCM Driver IC, VCM Driver IC 是使用I2C 控制, 先不考慮AF 程式 是如何寫, 當AF 找到焦點步數時, 會利用I2C 讓Driver IC 輸出電流給VCM, VCM 再移動透 鏡到達實際的對焦位置。
24
VCM Driver IC
• 除了DATA_M, DATA_L 這兩個register 讓VCM Driver IC 輸出電流來控制VCM 推動透鏡移動, 屬於動態register, 其餘都是Initial Register, 根 據VCM Driver 廠商對這個Camera 模組的 VCM而實驗出的Initial 值, 在程式起始時設進 去就好, 下面會解釋這些設定的功能。
2021/6/7
22
VCM Driver IC
• 範例: I2C Address
2021/6/7
23
VCM Driver IC
• 再來就是使用I2C 控制VCM Driver IC 內的 Register 動作, 以下只是某顆VCM Driver IC 的 Register 範例
2021/6/7
(IR-Cut), 多使用Blue glass • TV Distortion: 鏡頭扭曲度, 越小越好
2021/6/7
6
Lens 模組
• Lens 光學規格
2021/6/7
7
濾光片(IR-CUT)
• 紅外吸收濾光片, 主要功能為吸收紅外線波 長, 可修正Sensor 色偏現象, 避免紅外線的干 擾, 最好使用藍玻璃, 因為藍色波長有較高的 穿透率, 如果波長穿透率低, 會因光線某些顏 色無法穿透而產生色斑, 雖然後端可以做 Color shading 的補償, 但是補償還是有一定 的極限, 所謂一分錢一分貨, 建議最好使用藍 玻璃的IR-Cut。
工业相机与镜头选型方法(含实例)
工业相机与镜头选型方法(含实例)一、根据应用需求选型工业相机与镜头的选型首先要根据实际应用需求来确定。
应该明确拍摄的对象、需要的图像质量、成像速度等方面的要求。
例如,是否需要高分辨率的图像、是否需要高速连续拍摄、是否需要逆光环境下的高动态范围等等。
根据这些需求,可以确定所需要的传感器规格和镜头类型。
二、根据传感器规格选型传感器规格是工业相机选型的重要依据之一、传感器的大小直接影响到成像的角度、分辨率和噪声水平。
常见的传感器规格有1/2.3英寸、1/1.8英寸、2/3英寸、1英寸以及APS-C和全画幅等。
一般而言,传感器越大,成像角度越大,分辨率越高,噪声水平越低。
根据应用需求,选择合适的传感器规格。
实例一:如果应用需求是需要拍摄大范围场景,例如工业检测、机器视觉等,可以选择传感器规格较小的相机,例如1/2.3英寸传感器。
实例二:如果应用需求是需要高分辨率的图像,例如精细检测、高精度测量等,可以选择传感器规格较大的相机,例如APS-C或全画幅传感器。
三、根据镜头类型选型根据传感器规格确定之后,接下来要选择合适的镜头类型。
工业相机通常有固定焦距镜头、变焦镜头和特殊用途镜头等类型。
固定焦距镜头一般适合需要固定场景的拍摄,一般具有较高的分辨率和较低的畸变等特点。
变焦镜头适用于需要不同焦距的应用,具有变焦范围广、灵活性高的特点。
特殊用途镜头适用于特殊的应用场景,例如近距离测量、显微镜观察等。
实例三:如果应用场景需要拍摄不同物体的细节,例如高精度检测、PCB检测等,可以选择具有高分辨率和低畸变的固定焦距镜头。
实例四:如果应用场景需要拍摄不同距离的对象,例如检测机器人、机器视觉等,可以选择具有变焦范围广的变焦镜头。
四、根据镜头参数选型在确定镜头类型之后,还需要根据具体应用的需求选择合适的镜头参数,包括焦距、光圈和视场角等。
焦距是指镜头的焦距长度,影响到成像的角度和视场大小。
一般而言,焦距较短的镜头可以拍摄宽广的场景,焦距较长的镜头可以拍摄较小的视场。
长方形摄像头模组设计方案

长方形摄像头模组设计方案本文档旨在介绍一个长方形摄像头模组的设计方案。
该模组可以用于多种应用场景,例如安防监控、机器人视觉等。
本文将从摄像头模组的硬件设计和软件设计两个方面进行详细说明。
1. 硬件设计1.1 摄像头传感器摄像头传感器是模组的核心部件,它负责采集图像数据。
我们选择了一款高分辨率的CMOS传感器作为摄像头模组的核心部件。
该传感器具有以下特点: - 像素数:800万像素 - 传感器尺寸:1/2.5英寸 - 最大光圈:f/2.0 - 像素尺寸:1.4μm1.2 图像处理芯片为了实现更好的图像处理能力,我们在摄像头模组中加入了一颗图像处理芯片。
该芯片能够对采集到的图像进行降噪、增强等处理,并提供图像传输接口,方便与其他设备进行通信。
1.3 镜头镜头是摄像头模组的另一个重要组成部分。
我们选择了一款高品质的镜头,具有以下特点: - 焦距:4mm - 最大光圈:f/2.0 - 视野范围:120度 - 定焦设计1.4 模组接口为了方便摄像头模组的集成和使用,我们在设计中考虑了以下接口: - 数据接口:采用MIPI CSI-2接口,用于传输图像数据。
- 控制接口:采用I2C接口,用于配置和控制摄像头模组的参数。
2. 软件设计2.1 驱动程序为了使摄像头模组能够在各种设备上正常工作,我们提供了相应的驱动程序。
驱动程序包括以下功能: - 初始化摄像头模组,配置参数。
- 采集图像数据,并通过接口传输给外部设备。
- 支持图像处理功能,如降噪、增强等。
2.2 应用接口为了方便开发者进行二次开发,我们提供了一套简洁的应用接口。
开发者可以通过这些接口实现自己的功能,例如图像识别、目标追踪等。
应用接口包括以下功能: - 图像采集接口:用于获取摄像头采集的图像数据。
- 图像处理接口:用于对采集的图像数据进行处理。
- 图像传输接口:用于将处理后的图像数据传输给其他设备。
3. 总结通过对长方形摄像头模组的设计方案的详细介绍,我们可以看到该模组具有高分辨率、优质镜头和强大的图像处理能力。
佳能HF R16特点

佳能数码摄像机HF R16(红) 流畅拍摄,记录最精彩的片段 8G内置存储,239万像素,20倍光学变焦高清拍摄镜头商品介绍小巧、轻盈、美观的机身HF R16外形小巧,用一只手就可握住。
仅约270克的机身,让您轻松携带,随时拍摄精彩影像。
HF R16适合既追求时尚外形,又重视DV的实用性的用户!双闪存,大容量HF R16内置一个8GB存储器,可以记录约3*小时的高清影像,如果再外插一张32GB的SDHC存储卡,则可以记录长达约15*的高清影像,满足您长时间记录的愿望! *在LP模式下自动记录在内置存储器容量用尽时,HF R16的自动继续记录功能能够自动将影片记录到外插的SDHC卡中,这种介质间的转自动完成的,无需担心会中断影像拍摄过程。
智慧AUTO模式全新的智慧自动拍摄模式(以下简称智慧AUTO模式),能够让摄像机智能分析与判断拍摄场景中的人物主体信距离信息、亮度信息、颜色信息和运动信息等,并能根据这些因素自动选择最适合的场景模式,同时进行相应补偿。
只需轻按拍钮,摄像机就会帮您拍摄出清晰美丽的影像。
智慧识别31种场景模式智慧AUTO模式根据人们的使用习惯和使用场合将可能遇到的拍摄情况做了细致的划分,按照人物拍摄、风景拍摄和物体拍摄分31种场景模式。
使用智慧AUTO模式拍摄时,摄像机根据人物主体信息、距离信息、亮度信息、颜色信息和运动信息综合分析后自动切换到相应的拍摄模式,并在液晶屏上显示出相应的图标。
快速启动在待机状态下,只需打开液晶屏,摄像机即可在约1秒钟内快速启动并进入拍摄待机状态,只需按下记录键即可拍下稍纵即逝的镜头!1/5.5英寸约239万总像素的HD CMOS影像感应器这枚新开发的1/5.5英寸、约239万总像素的HD CMOS影像感应器,具有更广阔的动态范围。
芯片内降噪技术能够保证优异的降噪能力,使画质更加逼真与清晰。
第三代DIGIC DV III以高速和高画质对HD CMOS影像感应器所接收到的庞大信息数据进行演算处理。
直线模组选型计算实例

直线模组选型计算实例在进行机械设计时,模组是一个十分重要的部件,它不仅可以传动动力,还可以承受力的作用。
而直线模组作为其中一种常用的模组类型,被广泛应用于各种机械设备中。
然而,在选择直线模组时,需要考虑很多参数,如负载、速度、精度、寿命等等。
因此,选取合适的直线模组对于机械设计来说,是至关重要的一步。
下面,我们以一个直线模组选型计算实例来介绍一下直线模组的选型过程。
假设我们需要选购一款满足以下要求的直线模组:- 负载:1000N- 运行速度:0.5m/s- 精度:0.01mm- 寿命:10000小时步骤一:计算所需传动力矩直线模组在传动时需要承受一定的传动力矩,因此需要先计算出所需传动力矩。
公式为:M = F × L其中,M为所需传动力矩,F为负载,L为导轨长度。
假设导轨长度为500mm,根据公式可得:M = 1000N × 0.5m = 500Nm步骤二:根据传动力矩选型已知所需传动力矩为500Nm,我们需要在直线模组的参数表中找到合适的型号。
通常,在直线模组的参数表中都会标明型号所能承受的最大传动力矩,我们只需要找到一个大于或等于500Nm的型号即可。
假设我们找到了一个型号为XG120的直线模组,其最大传动力矩为600Nm,可以满足我们的需求。
步骤三:根据速度选型在确定了直线模组的型号后,我们需要根据运行速度来确认选型是否合适。
通常,在直线模组的参数表中都会标明型号的最大运行速度,我们只需要找到一个大于或等于0.5m/s的型号即可。
假设型号XG120的最大运行速度为1m/s,可以满足我们的需求。
步骤四:根据精度选型在满足传动力矩和速度要求的前提下,我们还需要确认直线模组的精度是否能够满足要求。
通常,在直线模组的参数表中都会标明型号的精度,我们只需要找到一个小于或等于0.01mm的型号即可。
假设型号XG120的精度为0.005mm,可以满足我们的需求。
步骤五:根据寿命选型最后,我们还需要根据寿命要求来确认直线模组的选型是否合适。
摄像头模组知识介绍
摄像头模组知识介绍
由于科技的快速发展,市场上的摄像头模组也在不断演进,从最初的高质量的模组到现在的模组更为复杂,性能也更加优越。
摄像头模组是一种可以实现视频、图像采集,处理和显示的一种集成电路模块,它是相机系统的重要组成部分,和其它的组件一起构成一个完整的相机系统。
摄像头模组的设计一般可以分为两部分,一部分是模组本身,由传感器、模组处理器、输出接口、电源模块等组成;另外一部分是配套的辅助硬件,如控制单元、激励板、数字滤波器等。
其中,摄像头模组本身占据了主要的比重,即模组的传感器、处理器、输出接口和电源模块,以下将对摄像头模组的各个组成部分进行介绍。
首先,摄像头模组的传感器是最重要的组成部分,控制着整个模组的性能,其主要任务是将光能转换为电信号存储于摄像头中,也就是可以看到的图像信息。
摄像头模组中最常用的传感器有CCD和CMOS,它们的主要区别在于CCD可以获得更高的图像分辨率,而CMOS在噪声控制和功耗方面更优。
摄像头模组和CIS_的选择建议
摄像头模组和CIS 的选择建议随着平板电脑,通讯娱乐产品,3G产业和智能手机在2011 的增长,将使得camera module 成为2011年移动通讯业界有可能短缺的物料,尤其是Apple iPhone 系列手机和iPAD 等产品的热销,将使得本来已经缺乏的camera 供应市场,更加严峻。
特别是2010年底的OV sensor 的缺货使得我们的供应存在一度紧张的局面。
通过实地考察和访谈以及一些所见所闻,下面我将从市场,供应等多个方面来提供我个人的一个分析,为2011年camera 的选型和供应提供一个建议。
我们首先来看看2010年的缺货,市场和供应端到底出了什么问题?首先,这次camera sensor 的缺货(主要是OV sensor的缺货)归因于IPHONE 4 的Camera Sensor 使用OV 5650 做为摄像头模组的CIS 器件。
由于5650 sensor 尺寸是1/3.2”的,所以,按照理论计算,如果原8” 的产线产能给到5650的生产,产出将是原来2M 产品线的40%,或者是VGA 产品线的10%。
以每个月500万iPhone 出货计算,需要8” w afer 12K,随着2011 Q1 iPHONE 的预计出货量增长30% 和iPAD2 (将配置500万和VGA双摄像头)的250万出货量,光500万摄像头就需要在8” 上增加wafer 增加10K 左右, 这个增长幅度是非常大的。
其次,由于iPhone 将5M做为标准配置,也使得其它品牌出产的智能手机, 平板电脑普遍采用5M做为摄像头配置。
HTC (G6,G7,G8,G9), Sharp (81xx), 魅族M9,宇龙N900S,联想乐phone ,三星galaxy,nexus S,Google nexus one ,Motorola XT 系列,Milestone, Droid pro, ME 系列,Apple iPhone 4,iPAD 2, RIM Blackberry 9780 等都选择5M像素camera module. 国内中兴,华为,宇龙,魅族,联想也积极推出5M像素摄像头功能的智能手机。
摄像头规格书
四角距离中心90%试场处亮度均值,至少达到中心试场亮度的 测试软件、
45%以上;每个角的亮度达到中心亮度的35%以上(取样框大小 小 灯 箱 ( 3400Lux , A
为40*40象素, sensor暗角补偿功能未开启)。
6500K白色背光)
对色彩还原误差不大于20%
测试软件 Color checker card
序号
测试项目
条件及要求
试验设备
1
低温储存
-30℃,96hours 升降温时间各 30min
2
低温运行
-20℃,96hours 升降温时间各 30min
低落温箱 低温箱
3
高温储存
80℃,96hours 升降温时间各 30min
高温箱
4
高温运行
70℃,96hours 升降温时间各 30min
高温箱
5
高温高湿储存 60℃,90%RH,120hours 升降温时间各 30min
Module No.
Module Size Temperature (Operation) Temperature (Stable Image) Assembly technique Focus Object distance Resolution PCB printing ink interface Power Operating system request Package Certifications Sensor Type
符合图纸要求 符合图纸要求 符合图纸要求
要求
检验方法 数显卡尺 数显卡尺 数显卡尺
不合格分类
A A A
A 版.
Page 5 of 11
2010/01/28
手机摄像模组基本知识优秀课件
SXGA 1/4 1005 20/24 1.8/2.5/3.3 15 YUV/RGB TBD
SXGA 1/5.5 905 20/24 2.5/3.0 15 YUV/RGB 80mW
UXGA 1/4 905 20/24 1.3/2.8/3.3 15 YUV/RGB 125mW
QXGA 1/3 905 20/24 1.8/2.8/3.3 15 RGB 110mW
。
手机摄像模组基本知识优秀课件
13
4. 模组生产相关技术及图纸
4.1.2 镜片材质
• 光学塑料
• 主要优点:1.非球面镜片的面型是由多项方程式决定的,其表面各点的半 径各不相同,在光学系统中引进非球面,可以校正球差、慧差、畸变、像 散等像差,使光学系统像质提高。
•
2.塑料非球面光学零件由于具有重量轻、成本低 、易于模压成型以
1.2 名词
FPC: Flexible Printed Circuit 可挠性印刷电路板
PCB: Printed Circuit Board印刷电路板
Sensor:图象传感器
IR:红外滤波片
Holder:基座
Lens:镜头
Capacitance : 电容
Glass:玻璃
Plastic:塑料
CCM:CMOS Camera Module
1.5 CCD和CMOS的区别
1.6.1 CCD(Charge Couple Device)
定义:即电荷耦合器件,它是目前比较成熟的成像器件,是以行为单位的电 流信号。传统彩色CCD感光单元及滤色镜的排列是方形的,以G-R-G-B型CCD 为例,可以简单理解为4个感光单元的中心点构成一个“像素点”,这样,每个 感光单元的光值都是复用的,使用了4次(边缘部位除外),每4个感光单 元计算出4个像素。
佳能HF R16参数基本性能

电池类型
纠错锂电池(BP-2L5)
其它性能
菜单语言
纠错内置24种语言
发布日期
纠错2010年01月
其它性能
纠错存储器互相复制功能;内置存储器只能复制到外插存储卡
快速启动:与液晶显示屏相连接
其它特点
纠错面部优先自动对焦
面部辅助对焦
面部场景检索和面部时间线
预录制功能
录拍合一
视频快照
自动继续记录
即时转换功能:拍摄模式下,可在影片拍摄模式和静止图像拍照模式之间转换;
摄像机附件
包装清单
纠错佳能HF R16机身x1
锂电池BP-2L5 x1
小型电源转换器CA-590 x1
电源线x1
USB连接线x1
立体声视频连接线STV-250N x1
分量视频连接线CTC-100/S x1
软件光盘x1
PIXELA Application Disc
图像应用程序
音乐数据光盘
可选配件
纠错锂电池NB-2LH
佳能HF R16参数基本性能
产品类型
纠错高清摄像机,闪存摄像机
传感器类型
纠错CMOS
传感器尺寸
纠错(1/5.5)英寸
传感器描述
纠错原色滤镜
最大像素
纠错239万
有效像素
纠错动态模式:约156万像IGIC DV III
镜头参数
光学变焦
纠错20倍
数字变焦
纠错400倍
镜头结构
纠错8组10片镜片(一片双面非球面镜片,ND滤镜)
等效35mm焦距
纠错动态影片[IS模式:标准/关闭]/照片模式:约40-800mm [IS模式:动态]约49-980mm
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
R16 Camera模块选型
文档履历
目录
R16 (1)
Camera模块选型 (1)
1.前言 (4)
1.1.编写目的 (4)
1.2.适用范围 (4)
1.3.相关人员 (4)
2.LCD和camera的扫描方向 (5)
2.1.LCD扫描方向 (5)
2.2.camera扫描方向 (6)
3.Camera安装方向与LCD的匹配 (7)
4.Declaration (9)
1.前言
1.1.编写目的
了解Camera模组选型注意事项。
1.2.适用范围
介绍本模块设计适用R16平台。
1.3.相关人员
TS人员,Camera模块研发人员,方案定制人员。
2.LCD和camera的扫描方向
2.1.LCD扫描方向
(1)从长边开始扫描,通常称为物理横屏,如图1.1所示:(以800X600分辨率为例)
(0,0)
(800,600)
图2.1LCD沿长边扫描(物理横屏)
(2)从短边开始扫描,通常称为物理竖屏,如图1.2所示:(以600X800
分辨率为例)
(0,0
(600,800)图2.2LCD沿短边扫描(物理竖屏)
2.2.camera扫描方向
camera扫描方向都是从长边开始扫描,如图1.3所示:(以800X600分辨率为例)
camera扫描方向
(0,0
图2.3camera扫描方向
3.Camera 安装方向与LCD 的匹配
由于LCD 和camera 的扫描方向可能不一致,所以必须将Camera 的安装方向和LCD 方向匹配,才能正确预览图片和拍照。
正确的匹配方向如下
1、LCD 沿长边扫描(物理横屏)时与camera 的匹配
LCD 为物理横屏时,将camera 安装成扫描方向与LCD 扫描一直即可,如图2.1所
示:
(0600)(0
600
)camera 扫描方向(0
600)
图3.1LCD 物理横屏与camera 匹配图2、LCD 沿短边扫描(物理竖屏)时与camera 的匹配
LCD 为物理竖屏时,需要将camera 安装成扫描方向与LCD 的扫描方向垂直,如图2.2
所示:(0,0600,800
)((600,800)
L C D 预览图像(注意:需要将图像旋转
90度
(0(600,800)Camera
扫描方向图3.2LCD 物理竖屏与camera 匹配图
3、Camera 错误的安装方向
如下camera 错误的安装方向(camera 安装成扫描方向与LCD 的扫描方向平行),得到如下2.3所示被拉伸的预览图像。
(0,0600,800)
(0
600)
camera 扫描方向
(600,800)L C D 预览图像被拉伸图3.3LCD 物理竖屏与camera 安装不匹配的情况
4.Declaration
This is the original work and copyrighted property of Allwinner Technology(“Allwinner”). Reproduction in whole or in part must obtain the written approval of Allwinner and give clear acknowledgement to the copyright owner.
The information furnished by Allwinner is believed to be accurate and reliable.Allwinner reserves the right to make changes in circuit design and/or specifications at any time without notice.Allwinner does not assume any responsibility and liability for its use.Nor for any infringements of patents or other rights of the third parties which may result from its use.No license is granted by implication or otherwise under any patent or patent rights of Allwinner. This datasheet neither states nor implies warranty of any kind,including fitness for any particular application.。