基于西门子PLC的机械手控制研究
基于PLC的机械手控制设计
基于PLC的机械手控制设计基于PLC的机械手控制设计,是一种智能化的机械手控制方法,它利用PLC 控制器进行逻辑控制,使机械手能够自主地完成多种工作任务。
本文将介绍本方法的具体实现过程,包括机械结构设计、PLC程序设计以及控制算法设计。
一、机械结构设计机械结构是机械手的核心,合理的机械结构设计将为实现机械手的自主运动提供必要的保障。
机械手一般由控制系统、机械部分和执行机构三部分组成。
机械部分一般包含基座和移动结构,执行机构包括手臂和手指。
这里我们以一款三轴机械手为例进行介绍。
1. 机械手构造机械手采用了一种比较简单的三轴结构,主要有三个关节——一个旋转关节和两个平移关节。
机械手的底座固定在工作台上,三个关节通过模拟伺服电机的方式进行控制。
2. 机械手控制器机械手采用PLC控制器进行逻辑控制,PLC控制器由三个部分组成:输入接口、中央处理器和输出接口。
输入接口用于读取传感器信号,输出接口用于控制执行机构,中央处理器则用于控制机械手的运动。
二、PLC程序设计机械手的PLC程序设计主要分为四个部分:程序初始化、数据采集、运动控制和异常处理。
1.程序初始化机械手程序初始化主要包括程序开头的自诊断和状态检测,并根据检测结果自动执行不同的控制程序。
自诊断可以避免因器件故障等原因引起的机械手操作异常。
2.数据采集机械手需要收集外部环境数据和操作数据。
外部环境数据包括工作物品的坐标、大小、形状等信息,操作数据包括机械手应该执行的命令。
在采集数据时,机械手需要通过传感器或外部设备接口实现。
3.运动控制机械手的运动控制分为机械手移位运动和执行机构运动两个部分。
机械手移位运动需要根据采集到的工作物品信息以及执行机构的操作命令来控制机械手的运动轨迹。
执行机构运动控制则是将机械手的控制信号转换为电机运动信号。
4.异常处理机械手运动过程中可能会出现异常情况,例如碰撞、误差等,需要通过对异常情况的处理来保证机械手的安全和可靠性。
基于PLC机械手控制系统设计
基于PLC机械手控制系统设计工业机械手是一种高科技自动化生产设备,也是工业机器人的一个重要分支。
它通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。
机械手作业的准确性和在各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。
机械手技术涉及到力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。
通用机械手是一种能够独立按程序控制实现重复操作的机械手,适用范围比较广。
由于通用机械手能够很快地改变工作程序,适应性较强,因此在不断变换生产品种的中小批量生产中得到了广泛的应用。
机械手的发展得益于其积极作用:一方面,它能够部分代替人工操作;另一方面,它能够按照生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送和装卸;还能够操作必要的机具进行焊接和装配,从而改善了工人的劳动条件,显著提高了劳动生产率,加快了实现工业生产机械化和自动化的步伐。
因此,机械手受到了很多国家的重视,投入了大量的人力物力来研究和应用。
尤其是在高温、高压、粉尘、噪音以及带有放射性和污染的场合,机械手的应用更为广泛。
近年来,在我国也有较快的发展,并取得了一定的效果,受到了机械工业的关注。
机械手是一种能够自动控制并可重新编程以变动的多功能机器,具有多个自由度,可以搬运物体以完成在不同环境中的工作。
随着工业技术的发展,机械手的结构形式开始比较简单,专用性较强。
但现在,制成了能够独立按程序控制实现重复操作,适用范围比较广的通用机械手。
本文介绍了机械手的分类和应用,其中第一类是通用机械手,可以根据任务需要编制程序完成各项规定工作。
本项目要求设计的机械手模型也属于这一类,通过设计可以增强对工业机械手的认识,并熟悉掌握PLC技术、位置控制技术、气动技术等工业控制常用的技术。
机械手控制系统的设计步骤包括确定被控系统必须完成的动作和它们之间的关系、分配输入输出设备、设计PLC用户程序、对程序进行调试和修改,最后保存已完成的程序。
基于西门子S7_200PLC控制的机械手项目技术报告

概要本文介绍了用PLC S7-200为控制电路主元件,外加电器系统,输入输出电路,构成了整体的实训项目。
通过PLC控制机械手来模拟工业生产过程中机电设备的工作原理。
工业机械手的任务是搬运物品,要求把物品从一个工位搬到另一个工位,如下图所示。
机械手的全部动作由气缸驱动,而气缸又由相应的电磁阀控制,这样使我们能更近距离地了解工业生产过程。
左移目录前言第一章机械手简介. . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . .5 1.1 机械手概念1.2 机械手总体结构第二章PLC介绍. . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . .6 2.1 PLC发展史2.2 PLC应用2.3 PLC特点第三章汽缸简介. . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . .8 3.1汽缸概念与汽缸分类3.2汽缸结构与工作原理第四章相关元气件. . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . .9 4.1电磁阀介绍4.2传感器介绍第五章项目的实施. . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . .11 5.1机械手的控制要求. . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . .11 5.2机械手总体设计方案. . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . .115.2.1主程序5.2.2公用程序5.3绘制原理草图. . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . .13 5.3.1开关原理图5.3.2PLC外部接线图5.3.3机械手气动原理图5.4元气件选型计算. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14 5.5输入/输出地址分配表. . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . .16 5.6绘制流程图或顺序功能图. . . . . . . . . . . . . . . . . . . . . .. . . . . . . .17 5.7机械手程序设计. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18 5.8系统的安装与调试. . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . .24 5.8.1系统安装工具5.8.2系统安装记录5.8.3系统安装故障分析及解决方法5.8.4安装验收表结论. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26参考文献. . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . .27前言为工业机械手研制一个技术性能优良的控制系统,对于提高工业机械手的整体技术性能来说具有十分重要的意义。
基于PLC的机械手控制系统设计

基于PLC的机械手控制系统设计摘要本文基于PLC的机械手控制系统设计实现了对机械手的自动控制,为机械手的工业应用提供了强有力的支撑。
文章首先介绍了机械手的概念、类型和特点,然后详细讲述了机械手控制系统的工作原理和设计实现。
通过实验验证,本文所设计的机械手控制系统可以实现对机械手的自动化控制和动作规划,具有较高的安全性和稳定性,同时具有广泛的适用性和可扩展性。
本文的研究成果对机械手的应用推广具有较大的意义。
关键词:PLC,机械手,控制系统,自动化控制,动作规划AbstractThis paper designs a mechanical arm control system based on PLC, which realizes the automatic control of the mechanical arm and provides strong support for the industrial application of the mechanical arm. This paper first introduces the concept, types and characteristics of mechanical arms, and then describes in detail the working principle and design implementation of mechanical arm control systems.Through experimental verification, the mechanical arm control system designed in this paper can achieve the automatic control and motion planning of the mechanical arm, with high safety and stability, as well as wide applicability and scalability. The research results of this paper have great significance for the application promotion of mechanical arms.Keywords: PLC, mechanical arm, control system, automaticcontrol, motion planning第一部分:引言随着工业无人化趋势的深入发展,机械手作为工业自动化的重要机器人之一,已经被广泛应用于工业制造、装配、取料、搬运等场景中。
基于西门子PLC 技术的机械手控制系统设计
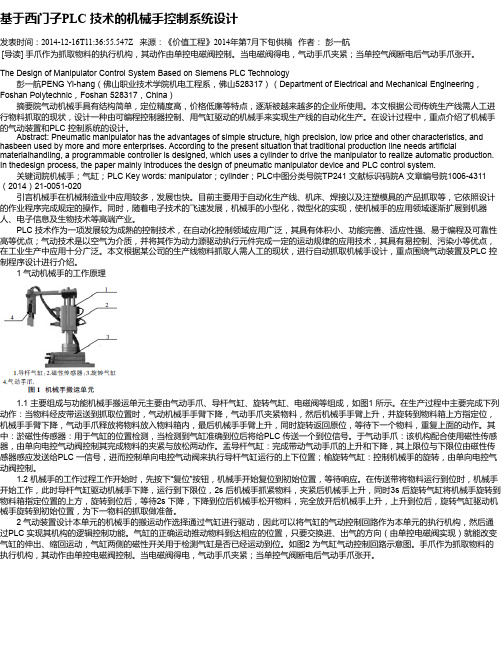
基于西门子PLC 技术的机械手控制系统设计发表时间:2014-12-16T11:36:55.547Z 来源:《价值工程》2014年第7月下旬供稿作者:彭一航[导读] 手爪作为抓取物料的执行机构,其动作由单控电磁阀控制。
当电磁阀得电,气动手爪夹紧;当单控气阀断电后气动手爪张开。
The Design of Manipulator Control System Based on Siemens PLC Technology彭一航PENG Yi-hang(佛山职业技术学院机电工程系,佛山528317)(Department of Electrical and Mechanical Engineering,Foshan Polytechnic,Foshan 528317,China)摘要院气动机械手具有结构简单,定位精度高,价格低廉等特点,逐渐被越来越多的企业所使用。
本文根据公司传统生产线需人工进行物料抓取的现状,设计一种由可编程控制器控制、用气缸驱动的机械手来实现生产线的自动化生产。
在设计过程中,重点介绍了机械手的气动装置和PLC 控制系统的设计。
Abstract: Pneumatic manipulator has the advantages of simple structure, high precision, low price and other characteristics, and hasbeen used by more and more enterprises. According to the present situation that traditional production line needs artificial materialhandling, a programmable controller is designed, which uses a cylinder to drive the manipulator to realize automatic production. In thedesign process, the paper mainly introduces the design of pneumatic manipulator device and PLC control system.关键词院机械手;气缸;PLC Key words: manipulator;cylinder;PLC中图分类号院TP241 文献标识码院A 文章编号院1006-4311(2014)21-0051-020引言机械手在机械制造业中应用较多,发展也快。
基于PLC的气动机械手控制系统设计

基于PLC的气动机械手控制系统设计一、本文概述随着工业自动化技术的飞速发展,气动机械手作为实现生产自动化、提高生产效率的重要工具,在各个领域得到了广泛应用。
基于可编程逻辑控制器(PLC)的气动机械手控制系统,以其稳定可靠、易于编程和维护的特性,成为当前研究的热点之一。
本文旨在探讨基于PLC 的气动机械手控制系统的设计方法,包括系统构成、硬件选择、软件编程以及调试与优化等方面,以期为我国工业自动化领域的发展提供参考和借鉴。
本文将简要介绍气动机械手及其控制系统的基本原理和特点,为后续的设计工作奠定理论基础。
将详细阐述PLC在气动机械手控制系统中的应用优势,包括其可靠性、灵活性以及扩展性等方面的优势。
在此基础上,本文将深入探讨基于PLC的气动机械手控制系统的设计方法,包括系统架构的设计、硬件设备的选择、软件编程的实现以及系统调试与优化等方面。
本文将总结基于PLC的气动机械手控制系统的设计要点和注意事项,为相关工程实践提供指导和借鉴。
通过本文的研究,旨在为我国工业自动化领域的发展提供新的思路和方法,推动气动机械手控制系统的技术进步和应用推广。
也期望本文的研究成果能对相关领域的学者和工程师产生一定的启示和借鉴作用,共同推动工业自动化技术的发展和创新。
二、气动机械手控制系统概述气动机械手控制系统是以可编程逻辑控制器(PLC)为核心,结合气动执行元件、传感器以及相应的控制逻辑,实现对机械手的精确控制。
该系统结合了气动技术的快速响应和PLC的灵活编程特性,使得机械手的动作更加准确、迅速且易于调整。
PLC控制器:作为整个控制系统的核心,PLC负责接收和处理来自传感器的信号,根据预设的程序逻辑,控制气动执行元件的动作。
PLC 具有高度的可靠性和稳定性,能够适应各种复杂的工作环境。
气动执行元件:包括气缸、气阀和气压调节器等。
气缸是实现机械手抓取、移动等动作的主要执行机构;气阀用于控制气缸的运动方向和速度;气压调节器则用于调节气缸的工作压力,以保证机械手的稳定性和精确性。
基于plc的搬运机械手控制系统设计
2.2.2 阀门的选择 2.2.3 行程开关的选择
2020/7/22
2.2.4 接近开关的选择 为了提高系统的可靠性与动作执行的准确性,选择OMRON公司的
E2E-X5ME2型接近开关。它的具体参数如下: (1)检测距离:5mm (2)电源电压:DC12~24V (3)消耗电流:小于13mA (4)检测物体:磁性物体 (5)响应时间:0.3~1ms (6)输出方式:NPN输出 接近开关也叫近接开关,又称无触点行程开关,它除可以完成行程控
2020/7/22
1 绪论
1.1 引言 机械手是能模仿人手与臂的某些动作功能,用以按固定程序抓取、搬
运物件或操作工具的自动操作装置。 机械手的种类,按驱动方式可分为机械式、气动式、电动式、液压式
机械手;按适用范围可分为专用机械手与通用机械手两种;按运动轨 迹控制方式可分为点位控制与连续轨迹控制机械手等。 本课题介绍了一种精确控制机械手的方法,以西门子公司的S7-200系 列PLC作为机械手的主控制器,外接控制面板以实现对3自由度机械 手控制的功能,实现一个精确的自动控制系统。
2020/7/22
1.3 机械手的应用意义 (1)可以提高生产过程的自动化程度 (2)可以改善劳动条件避免人身事故在高温、高压、低温、低压、
有灰尘、噪声、臭味、有放射性或有其它毒性污染以及工作空间狭窄 等场合中,用人手直接操作是有危险或根本不可能的。 3)可以减少人力便于有节奏地生产应用机械手代替人手进行工作, 这是直接减少人力的一个侧面,同时由于应用机械手可以连续地工作, 这是减少人力的另一个侧面。 1.4发展前景 随着科技日益进步,以前需要人工加工制造的行业开始向自动化技术 转变。作为近几十年发展起来的一种高科技自动化生产设备,工业机 器人、机械手在现代制造技术领域中扮演了极其重要的角色,其能自 动化定位控制并可重新编程序以变动的多功能机器,并有多个自由度, 可用来搬运物体以完成在各个不同环境中工作
S7-200的搬运机械手的PLC控制

S7-200 的搬运机械手的PLC 控制机械手是在机械化、自动化生产过程中发展起来的一种新型装置,它能模仿人手臂的某些动作功能,可按固定顺序在空间抓、放、搬运物体等,动作灵活多样,广泛应用在工业生产和其他领域内。
应用机械手可减少工人的重复操作,并能代替人类在危险与有毒性环境中工作,极大地提高了生产效率与工作精度,而且对保障人身安全,改善劳动环境,减轻劳动强度有着十分重要的意义。
可编程序控制器( PLC) 是从20 世纪60 年代末发展起来的一种新型的电气控制装置,它以微处理器为核心,将计算机技术、自动控制技术和通信技术融为一体,以其结构简单、易于编程、性能优越、可靠性高等显著优点而在工业控制领域得到了迅猛的发展,被广泛地应用于各种生产机械和生产过程的自动控制中。
德国西门子公司的PLC 产品在国内应用比较广泛,其中S7-200 系列PLC 以结构紧凑、高性价比、多种多样的CPU 尺寸以及基于Windows 的编程工具等特点在中、小规模控制系统中有独特的优势。
笔者选用西门子S7-200 为控制器,所研究的机械手采用水平/垂直位移加平面转动式结构。
机械手的全部动作由气缸驱动,PLC 控制相应的电磁阀驱动气动执行元件完成各动作。
这种控制系统能十分方便地嵌入到各类工业生产线中,完成零部件产品在固定位置之间的搬运,实现生产自动化。
1 控制功能分析机械手搬运零部件动作示意图如图1 所示,该机械手可用来将工件从左工作台搬到右工作台,其动作过程分为10 工步,即从原位开始顺序经过10个动作后完成一个周期,并返回原位。
该机械手能够抓取的工件质量m 为0. 1 kg,搬运物料过程中垂直方向加速度和水平方向加速度均为0. 3 g( g 为重力加速度) ,平面转动的回转半径r 为0. 5 m,转动角速度ω为3. 5 rad /s,角加速度β为2. 1 rad /s2,转动角度 为180°。
机械科学与技术第30 卷图1 机械手动作示意图其中为了使上升/下降、左移/右移和顺转/逆转动作能够执行,分别由3 个双线圈二位电磁阀控制气缸的动作。
西门子PLC应用实例:简易机械手的PLC控制
西门子PLC应用实例:简易机械手的PLC控制
今天,小编给大家介绍一个西门子PLC入门级应用实例,简易机械手的控制。
下面进入正题:
如上图所示,M1为控制机械手左右移动的电动机,M2为控制机械手上下升降的电动机,YV线圈用来控制机械手夹紧防松,SQ1为左到位检测开关,SQ2为右到位检测开关,SQ3为上到位检测开关,SQ4为下到位检测开关,SQ5为工件检测开关。
控制要求如下:
1.机械手要将工件从工位A移到工位B处;
2.机械手的初始状态(原点条件)是机械手应停在工位A的上方,SQ1、SQ3均闭合;
3.若原点条件满足且SQ5闭合(工件A处有工件),按下启动按钮,机械手按“原点→下降→夹紧→上升→右移→下降→防松→上升→左移→原点”的步骤工作。
如下图所示:
编程前理顺动作如何转移:
定义符号表:
硬件的接线图:
满足所有动作的程序如下:
下面我们一段一段分析这个机械手是如何工作的:
END。
基于PLC控制的机械手设计毕业论文绪论

基于P L C控制的机械手设计毕业论文绪论Pleasure Group Office【T985AB-B866SYT-B182C-BS682T-STT18】第一章绪论PLC简介可编程控制器简称PLC(Progrsmmable Logic Controller,PLC),它是以微处理器为基础服务夫人通用工业控制装置。
国际电工委员会(IEC)在1985年的PLC标准草案第3稿中,对PLC作了如下定义:“可编程控制器是一种数字运算操作的电子系统,专为在工业环境下应用而设计。
它采用可编程序的存储器,用来在其内部存储执行逻辑运算、顺序控制、定时、计算和算术运算等操作的指令,并通过数字式、模拟式的输出和输入,控制各种类型的机械或生产过程。
可编程控制器及其有关设备,都应按易于工业控制系统形成一个整体,易于扩充其功能的原则设计。
”可编程控制器是一种通用的工业控制计算机。
它的程序是可以控制不同的对象。
具有更大的灵活性,再加上体积小、工作可靠性高、抗干扰能力强、控制功能完善,适应性强,安装接线简单等众多优点,它可以方便地应用在各种场合,PLC采用了典型的计算机结构,主要是由微处理器(CPU)、存储器(RAM/ROM)、输入输出接口(I/O)电路、通信接口及电源组成。
中央处理单元(CPU)是可编程逻辑控制器的控制中枢。
它按照可编程逻辑控制器系统程序赋予的功能接收并存储从编程器键入的用户程序和数据;检查电源、存储器、I/O以及警戒定时器的状态,并能诊断用户程序中的语法错误。
当可编程逻辑控制器投入运行时,首先它以扫描的方式接收现场各输入装置的状态和数据,并分别存入I/O映象区,然后从用户程序存储器中逐条读取用户程序,经过命令解释后按指令的规定执行逻辑或算数运算的结果送入I/O映象区或数据寄存器内。
等所有的用户程序执行完毕之后,最后将I/O映象区的各输出状态或输出寄存器内的数据传送到相应的输出装置,如此循环运行,直到停止运行。
完整版)基于plc的机械手控制系统设计

完整版)基于plc的机械手控制系统设计机械手由机械结构、控制系统和执行器三部分组成。
机械结构是机械手的基本骨架,包括机械手臂、手爪等组成部分。
控制系统是机械手的大脑,负责控制机械手的运动和操作。
执行器是控制系统的输出部分,负责执行控制系统的指令,驱动机械手完成各种动作。
机械手的组成部分相互协调,共同完成机械手的工作任务。
2 PLC控制系统简介2.1 PLC概述PLC是可编程控制器的简称,是一种专门用于工业自动化控制的通用控制器。
它以微处理器为核心,具有高可靠性、强抗干扰能力、良好的扩展性和灵活性等特点。
PLC广泛应用于工业生产中的自动化控制领域,如机械制造、化工、电力、交通、冶金等行业。
2.2 PLC控制系统组成PLC控制系统主要由PLC主机、输入输出模块、编程软件和人机界面组成。
PLC主机是PLC控制系统的核心,负责控制整个系统的运行和实现各种控制功能。
输入输出模块负责将外部信号转换为PLC可以处理的数字信号,并将PLC输出信号转换为外部可控制的信号。
编程软件用于编写PLC程序,实现控制系统的各种功能。
人机界面是PLC控制系统与用户之间的接口,用于实现人机交互,方便用户对控制系统进行操作和监控。
3 基于PLC的机械手控制系统设计3.1系统设计思路本文设计的基于PLC的机械手控制系统主要由PLC控制系统、步进电机驱动系统和机械手组成。
PLC控制系统负责控制机械手的运动和操作,步进电机驱动系统负责驱动机械手的运动,机械手负责完成各种动作任务。
系统设计采用模块化设计思路,将系统分为PLC控制模块、步进电机驱动模块和机械手运动模块,分别进行设计和实现,最后进行整合测试。
3.2系统设计方案PLC控制模块采用西门子PLC作为控制核心,通过编写PLC程序实现机械手的控制和操作。
步进电机驱动模块采用步进电机驱动器和步进电机组成,通过PLC控制信号驱动步进电机实现机械手的运动。
机械手运动模块由机械结构、执行器和传感器组成,通过步进电机驱动器驱动执行器完成机械手的各种动作,通过传感器检测机械手的运动状态并反馈给PLC控制系统。
基于PLC的机械手控制设计
基于PLC的机械手控制设计1. 引言1.1 背景介绍背景介绍:机械手是一种能够模仿人手动作完成各种工作任务的机械装置,具有高效、精准、稳定的特点,被广泛应用于工业生产线、仓储物流等领域。
随着工业自动化水平的不断提高,机械手在生产中的应用越来越广泛,对机械手控制技术的要求也越来越高。
本文旨在研究基于PLC的机械手控制设计,探讨PLC在机械手控制中的应用,设计机械手控制系统,并进行实验验证。
通过本研究,旨在提高机械手控制精度和稳定性,推动工业自动化技术的发展,为工业生产提供更多可能性。
1.2 研究意义机器人技术在现代工业生产中起着越来越重要的作用,而机械手作为机器人的重要组成部分,其控制技术的研究对于提高生产效率、降低成本具有重要意义。
研究如何利用PLC进行机械手控制设计,可以实现机械手的自动化控制,提高生产线的运行效率,减少人为操作的误差,提高产品的质量稳定性。
在工业生产中,机械手的广泛应用使得对其控制技术的研究变得至关重要。
通过PLC的应用,可以实现机械手的精准运动控制,灵活适应不同的工作环境和任务要求。
PLC具有高度稳定性和可靠性,能够保证机械手的稳定运行,提高生产效率。
通过本研究,可以深入了解PLC在机械手控制中的具体应用方法,为工程师和研究人员提供参考和借鉴。
本研究的结果也有助于推动机械手领域的发展,促进工业自动化水平的提升。
研究如何基于PLC进行机械手控制设计具有重要的理论和实践意义。
1.3 研究目的研究目的是为了探究基于PLC的机械手控制设计在工业自动化领域的应用效果,为工业生产提高效率、降低成本和减少人为操作风险提供技术支持。
通过本研究,可以深入了解PLC在机械手控制系统中的具体应用方式和优势,为工程技术人员提供可靠的控制方案。
通过对PLC程序设计和机械手运动控制的研究,可以为相关领域的技术人员提供实用的指导和参考。
本研究的目的还在于验证基于PLC的机械手控制系统的可行性和稳定性,为工业生产过程中的自动化控制提供科学依据。
基于PLC机械手臂的设计毕业论文
基于PLC机械手臂的设计毕业论文一、《基于PLC机械手臂的设计毕业论文》随着工业自动化水平的不断提高,机械手臂作为重要的自动化设备之一,在工业领域的应用越来越广泛。
PLC(可编程逻辑控制器)作为机械手臂控制的核心部件,其性能和控制精度直接影响着机械手臂的工作效率和稳定性。
因此基于PLC的机械手臂设计研究具有重要的实际意义和应用价值。
本文旨在探讨基于PLC的机械手臂设计的相关问题,为相关领域的研究提供参考。
近年来工业自动化进程不断加快,工业生产效率的要求也日益提高。
机械手臂作为自动化设备的重要组成部分,已经广泛应用于焊接、装配、搬运等工业生产领域。
而PLC作为机械手臂的控制核心,其性能和控制精度直接影响到机械手臂的工作效率和稳定性。
因此开展基于PLC的机械手臂设计研究,不仅可以提高机械手臂的性能和稳定性,还可以推动工业自动化水平的提高,对于提高工业生产效率和质量具有重要的意义。
本文研究的主要内容包括基于PLC的机械手臂控制系统设计、运动控制算法研究以及实验验证等方面。
通过对PLC控制技术的深入研究,结合机械手臂的运动特点,设计出一套高效稳定的机械手臂控制系统。
同时研究机械手臂的运动控制算法,提高机械手臂的运动精度和速度。
最后通过实验验证,评估系统的性能。
研究目标为开发出一套具有自主知识产权的基于PLC的机械手臂控制系统,为工业自动化领域提供技术支持。
目前国内外对于基于PLC的机械手臂设计研究已经取得了一定的成果。
国外在PLC技术和机械手臂技术方面处于领先地位,已经有很多成熟的机械手臂产品问世。
而国内在PLC技术和机械手臂技术方面还存在一定的差距,但是国内的研究机构和企业在不断努力,已经取得了一些重要的进展。
因此本文旨在通过对基于PLC的机械手臂设计研究,了解国内外现状,提高国内在该领域的技术水平。
同时通过对PLC控制技术的深入研究,为相关领域的研究提供参考。
研究方法和技术路线本文将采用理论分析和实验研究相结合的方法进行研究,首先进行理论分析,包括对PLC控制技术的研究和对机械手臂运动特点的分析。
基于PLC的工业机械手运动控制系统设计

基于PLC的工业机械手运动控制系统设计一、本文概述随着工业自动化的快速发展,工业机械手在生产线上的应用越来越广泛。
作为实现自动化生产的关键设备,工业机械手的运动控制系统设计至关重要。
本文旨在探讨基于可编程逻辑控制器(PLC)的工业机械手运动控制系统设计,通过对PLC技术原理及其在工业机械手控制中的应用进行深入分析,提出一种高效、稳定的运动控制方案。
本文首先介绍了工业机械手及PLC的基本概念,然后详细阐述了基于PLC的工业机械手运动控制系统的硬件组成和软件设计,包括PLC的选型、输入输出电路设计、运动控制程序设计等。
通过实际案例验证了本文所提设计方案的可行性和有效性。
本文旨在为工程师和技术人员提供一套完整的基于PLC的工业机械手运动控制系统设计方案,为工业自动化领域的发展做出贡献。
二、PLC基础知识PLC,即可编程逻辑控制器(Programmable Logic Controller),是一种专为工业环境设计的数字运算电子系统,用于控制各种类型的机械设备或生产过程。
PLC采用可编程的存储器,用于在其内部存储执行逻辑运算、顺序控制、定时、计数和算术运算等操作的指令,并通过数字式或模拟式的输入/输出控制各种类型的机械或生产过程。
通用性强:PLC产品已经标准化、系列化、模块化,配备有品种齐全的各种硬件装置供用户选用,用户能灵活方便地进行系统配置,组成不同功能、不同规模的系统。
可靠性高:PLC采用大规模集成电路技术,严格的生产工艺制造,内部电路采取了先进的抗干扰技术,具有很高的可靠性。
PLC带有硬件故障自我检测功能,出现故障时可及时发出警报信息。
编程简单:PLC的编程语言易于为工程技术人员所接受。
梯形图语言的图形符号与表达方式和继电器电路图相当接近,只用PLC的少量开关量逻辑控制指令就可以方便地实现继电器电路的功能。
维护方便:PLC的故障率很低,且有完善的自诊断和显示功能。
当系统发生故障时,能及时地查出故障的原因,给出提示,使维修人员能及时排除故障。
基于PLC的机械手控制设计(毕业设计)
基于PLC的机械手控制设计(毕业设计)
毕业设计题目:基于PLC的机械手控制设计
设计目标:
设计一个基于PLC的机械手控制系统,能够实现机械手对物体的抓取和放置操作。
设计内容:
1. 硬件设计:选择合适的PLC控制器,根据机械手的结构和控制需求,设计电路和连接方式,包括传感器、执行器、驱动器等硬件组成部分。
2. 软件设计:编写PLC程序,实现机械手的控制逻辑。
包括对机械手运动轨迹的规划、抓取力度的控制、异常情况的处理等功能。
3. 通信设计:如果需要与其他设备或系统进行通信,设计与外部设备的接口和通信协议。
4. 安全设计:考虑机械手在工作过程中可能出现的危险情况,设计安全机制,如急停按钮、防碰撞装置等。
5. 用户界面设计:设计一个简明易懂的用户界面,方便用户对机械手进行操作和监控。
6. 系统测试和调试:对设计的控制系统进行测试和调试,保证系统的稳定性和可靠性。
7. 性能评估和改进:对设计的控制系统进行性能评估,分析系统的优点和不足,并提出改进方案。
8. 文档编写:编写毕业设计报告,包括设计方案、实施过程、测试结果和分析等内容。
预期成果:
1. 完整的机械手控制系统,能够准确抓取和放置物体。
2. 可靠的硬件设计和稳定的软件程序。
3. 安全可靠的系统设计,能够防止意外事故的发生。
4. 用户友好的界面设计,简化操作流程。
5. 毕业设计报告和相关文档。
《2024年基于PLC的工业机械手运动控制系统设计》范文

《基于PLC的工业机械手运动控制系统设计》篇一一、引言随着工业自动化技术的不断发展,机械手运动控制系统在工业生产中扮演着越来越重要的角色。
为了提高生产效率、降低人工成本以及提高产品质量,基于PLC(可编程逻辑控制器)的工业机械手运动控制系统设计成为了研究的热点。
本文将详细介绍基于PLC的工业机械手运动控制系统的设计,包括系统架构、硬件设计、软件设计以及系统测试等方面。
二、系统架构设计基于PLC的工业机械手运动控制系统主要由机械手本体、传感器、PLC控制器、上位机等部分组成。
其中,PLC控制器作为核心部件,负责接收上位机的指令,控制机械手的运动。
整个系统采用分层结构设计,包括感知层、控制层和应用层。
感知层通过传感器获取机械手的状态信息;控制层通过PLC控制器对机械手进行精确控制;应用层则负责与上位机进行通信,实现人机交互。
三、硬件设计1. 机械手本体设计:机械手本体包括手臂、腕部、夹具等部分,根据实际需求进行设计。
在设计过程中,需要考虑到机械手的运动范围、负载能力、精度等因素。
2. 传感器选型与布置:传感器用于获取机械手的状态信息,包括位置传感器、力传感器、速度传感器等。
选型时需要考虑传感器的精度、可靠性以及抗干扰能力。
布置时需要根据机械手的实际结构进行合理布置,以确保能够准确获取机械手的状态信息。
3. PLC控制器选型:PLC控制器是整个系统的核心部件,选型时需要考虑到控制器的处理速度、内存大小、I/O口数量等因素。
同时,还需要考虑到控制器的可靠性以及与上位机的通信能力。
4. 电源与接线设计:为了保证系统的稳定运行,需要设计合理的电源与接线方案。
电源应采用稳定可靠的电源,接线应采用抗干扰能力强的电缆,并合理布置接线位置,以减少电磁干扰对系统的影响。
四、软件设计1. 编程语言选择:PLC编程语言主要包括梯形图、指令表、结构化控制语言等。
在选择编程语言时,需要考虑到编程的便捷性、可读性以及系统的运行效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 三 机 械 手 运 行 总 方 案流 程 图
总体方案 中选择手动和 自动运行的程序如图四 所 示 。运行 方 式 的旋 转 按钮 接 通 时 ,10.1为 1,此 时 为手动运行 ;10.1为 0时 ,常 闭触点为 1,运 行 自动 模式。因此 ,可以通过旋转按钮对工作方式进行选 择 。
PLC能 够快 速 、有 效 的控 制 机 械 手 ,从 而 达 到 节 省
一 人力 、提高生产效率的 目的。
参考 文献 [1]蒋少茵 .PLC控制 的机械手 [J].微计算 机信
息 ,2002,18(02):20—22.
[215E/] ̄玲 .工 业 机 械 手 的 PLC控 制 [J].机 电 工
程技 术 ,2004,33(09):33,37.
【3]汪欢 欢 ,胡 国清 ,周 青辉 .基 于 PLC的气 动机
图 六 机械 手 下 降程 序
械手控制 系统设计 与研究 液压 与气 动 ,2012,(09):
38—40.
在 机械 手 夹 紧工 件 时 ,必 须有 压 力 传感 器 感 应 到 压力 达 到 了一 定值 才 可 以进 行 下 一步 动 作 ,而 该 值 的设定 程序 如 图七所 示 。
态等值问题的研究 电网技术,2004,28(07):58.61.
【7]孙蓉 ,吕淑平 ,苏丽 ,等.基于西门子 PLC的
远程实验平 台建立与实现【J].实验技 术与管 理 ,2013,30
(10):87—89,99.
图 七 机械 手压 力值 设 定 程 序
[8]齐继 阳 ,吴倩 ,何 文 灿 .基 于 PLC和触 摸屏 的 气 动机 械 手 控 制 系统 的设 计 [J].液 压 与气 动 ,2013,
(04):19—22.
通过 STEP7软件对机械手运行动作进行设定 ,
编程方便 、修改简单 ;利用西门子 s-300PLC 到 提升 生 产 效率 的效果 。
刘培 来 (1988 一
),河 北沧 州人 。
canl
J肝卜__{
c丑s2
r J柙)____1
图二 系统控制结构图
图四 运行方式选择程序
机械手 的程序启动后 ,首先有回原点步骤 ,回原 点 后 ,就可 以选 取手 动模式 或 自动模 式 。当机械 手需 要 上 升 时 ,按 下 上升 按 钮 I1.0,此 时 I1.0接 通 ,同 时 下降输 出 Q2.0、上升标志位 M1.0和停止按钮 Q3.o 都为 。才可 以达到上升的目的,程序设定如图五所 示 。
[4]李 景 魁.基 于 PLC的机 械 手控 制 系统设 计 [J]. 煤 矿机 械 ,2012,33(10):147.148.
[5]范金 玲 .基 于 PLC的气 动机 械 手控 制 系统 设 计 [J].液压 与气 动 ,2010,(07):36—38.
[6]孙建锋 ,焦连伟 ,吴俊玲 ,等.风电场发电机动
机械手通过液压来驱动 ,通过液压缸 的伸缩控 制机械手的收缩 、夹紧、松开、升降等动作 ,旋转 的手 腕和手臂是通过液压 电机控制 ,当机械手 的部分执 行机构来 回做往复动作时 ,可 以用液压控制阀的通 断使线圈通断电,从而驱动相关机构动作 。 2 PLG 系统 设计
本文 PLC控制机械手的系统中 ,输入通过 24V 电源供电,利用各种感应开关检测机械手 的输入命 令 ,如夹紧动作 、松开动作、上升动作 、下降动作等 。 输 出为继 电器输 出,通过输出点控制 电磁 阀。根据 车间工作环境以及余量使用充分等要求 ,本文采用 西 门子 S-300PLC,此外 ,根据选用 PLC的输入输出 特性 ,还需增加扩展模块 。该控制系统的控制结构 图如 图二所 示 。
K~
一
_ 4 结束语 本 文根 据液 压驱 动机 械手 的特性 ,介 绍 了机 械 手的结构 ,利用西 门子 s.300 PLC对其进行控制 ,利
用 STEP7软件设计程序。实验结果表明 ,利用该
机械手下降程序和上升程序相似 ,当机械手需 要下降时 ,按下下降按钮 I2.0,此 时 1 2.0接通 ,同时 上升 输 出 Q1.0、下 降 标 志位 M2.0和停 止 按 钮 Q3.0 都 为 0才可 以达 到下 降 的 目的 ,程 序设 定 如 图六所 示 。
所 示嘲。
3 程序 设计 机 械手 控制程 序设 计过 程 中 ,应 首先对 总体 方
案进行设计 。整体程序分为两部分 :(1)手动部分 ; (2)自动部分 。总体方案流程图如图三所示。
图 一 机 械 手 结 构 图
图一 中 ,1是手指 ,用 来夹 紧工 件 ;2和 4分 别是 手腕 、手臂 ,能够回转 ;3是运动柱 ,能在水平方向伸 缩 ;5是立 柱 ,可 以上 下运 动 。